

A Parameter-Free Method for Estimating the Stator Resistance of a Wound Rotor Synchronous Machine
 , , , , , and
, , , , , and
Abstract
:1. Introduction
- Direct measurement methods;
- Model-based estimation methods;
- Signal injection-based methods.
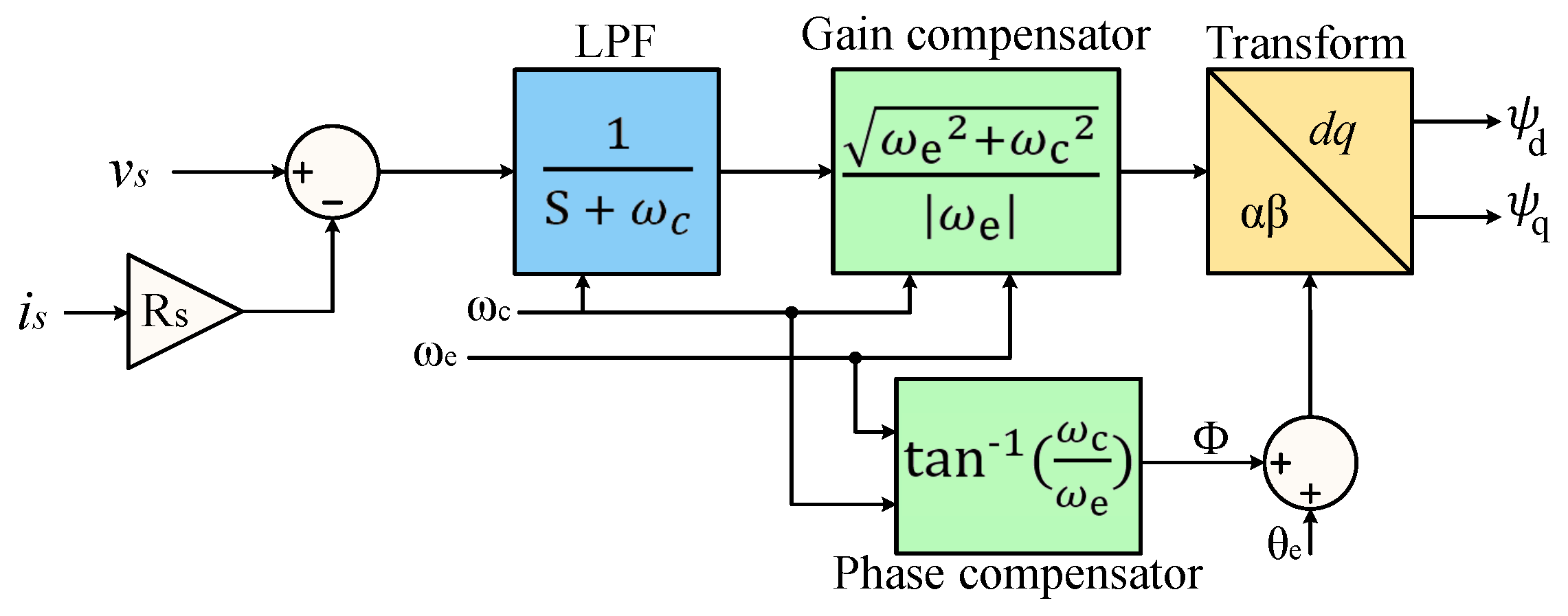
2. Flux Estimation
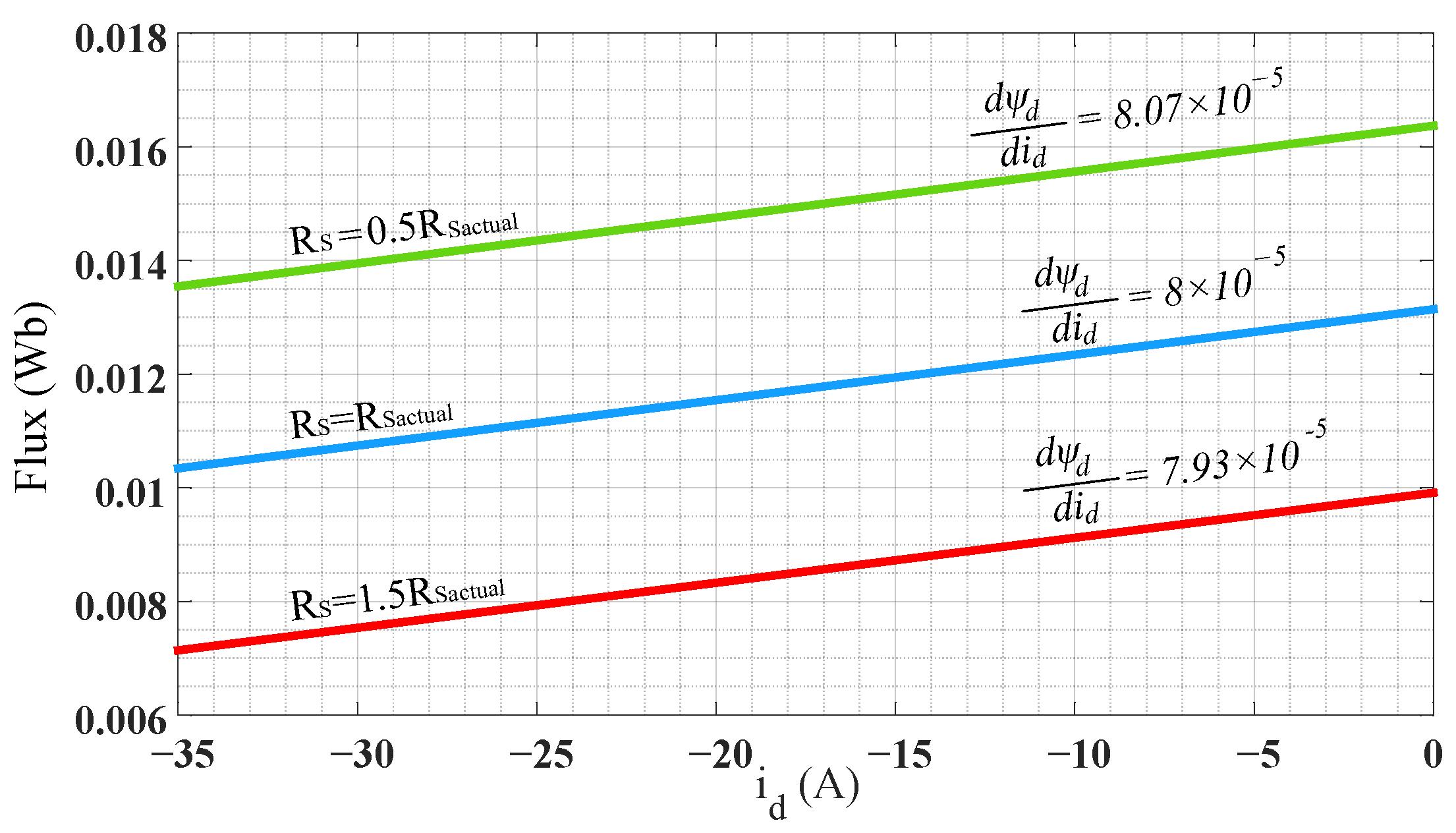
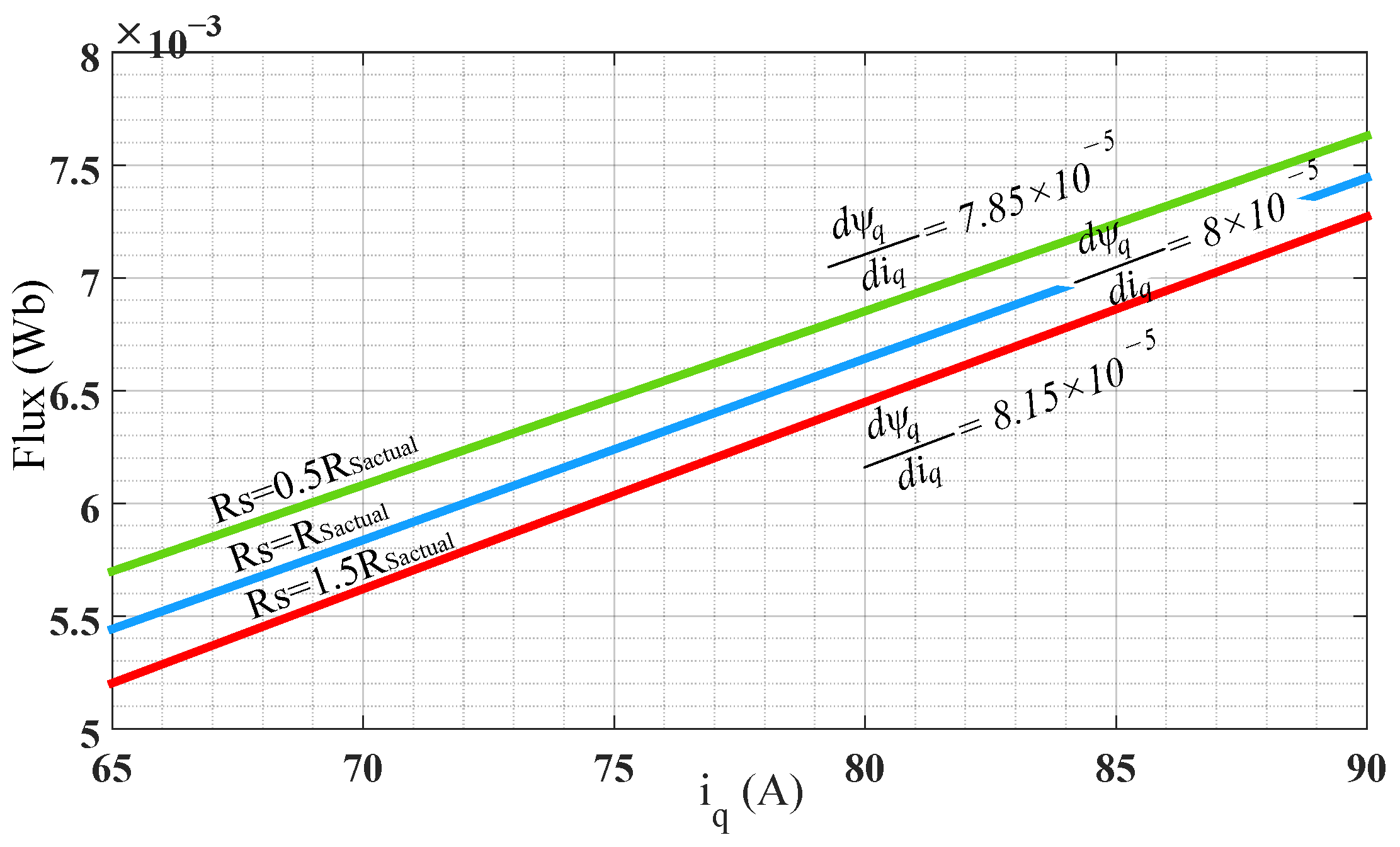
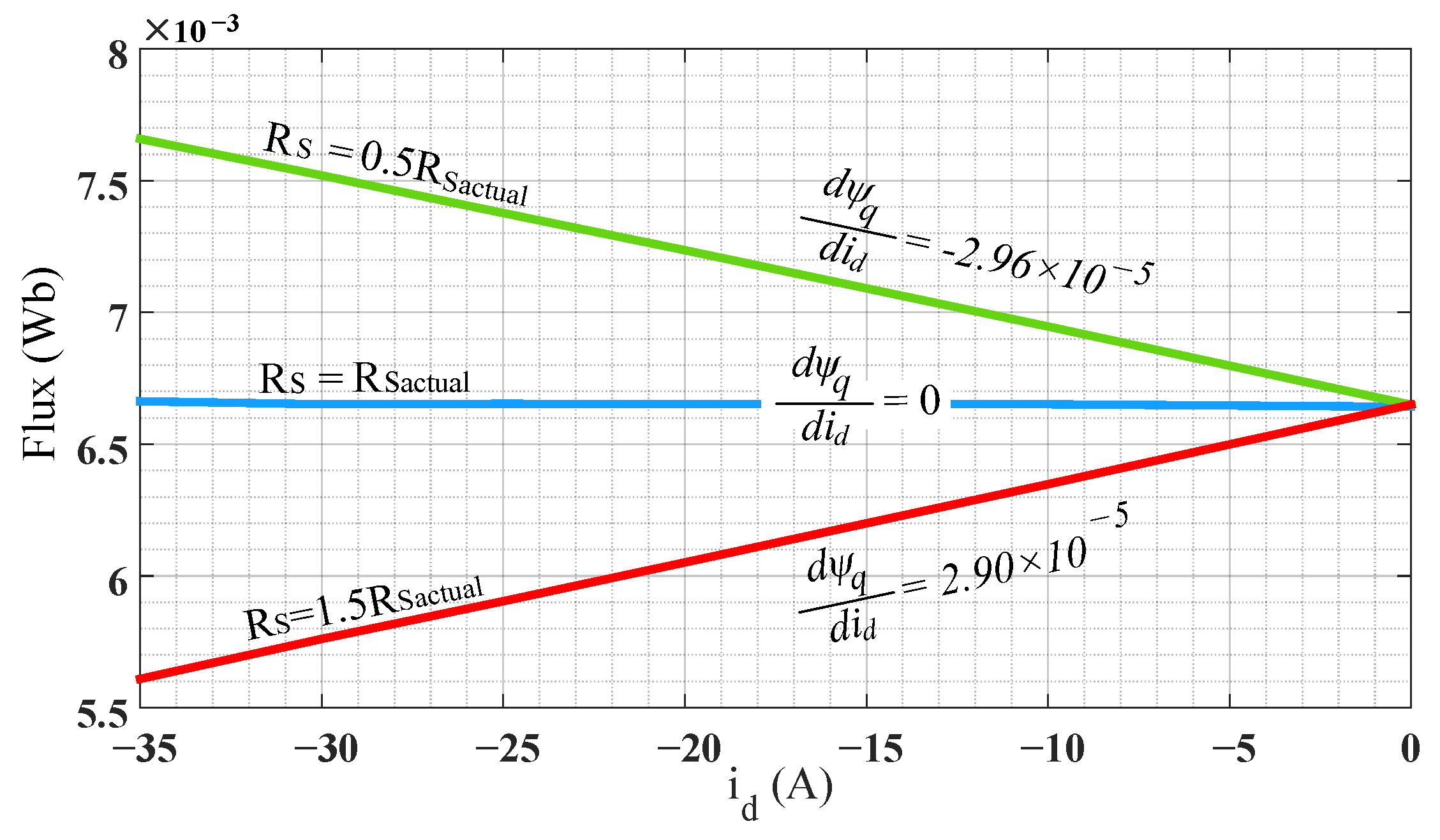
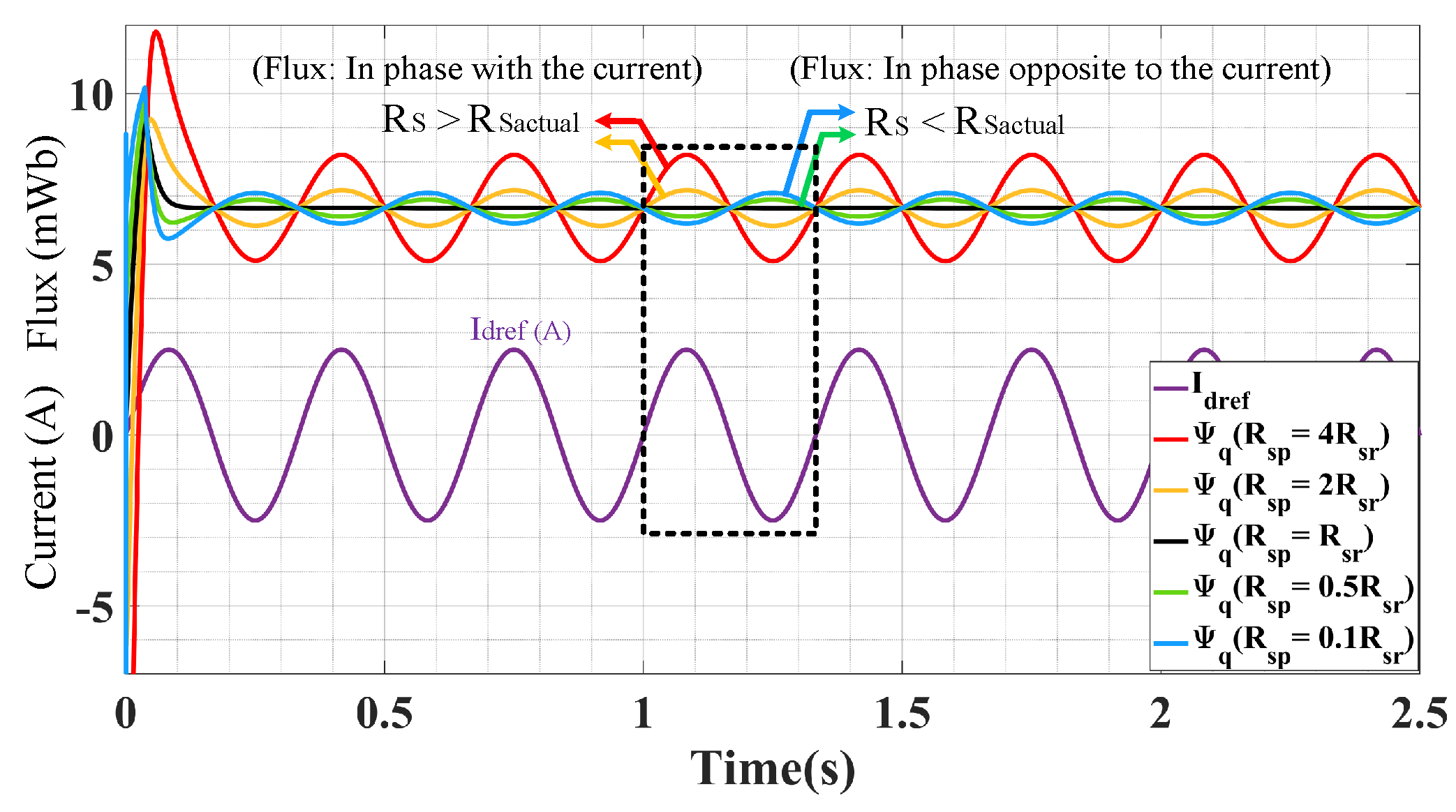
3. Effect of Stator Resistance Mismatch on the Estimated Flux
4. Simulation and Method Explanation
4.1. Estimated Flux
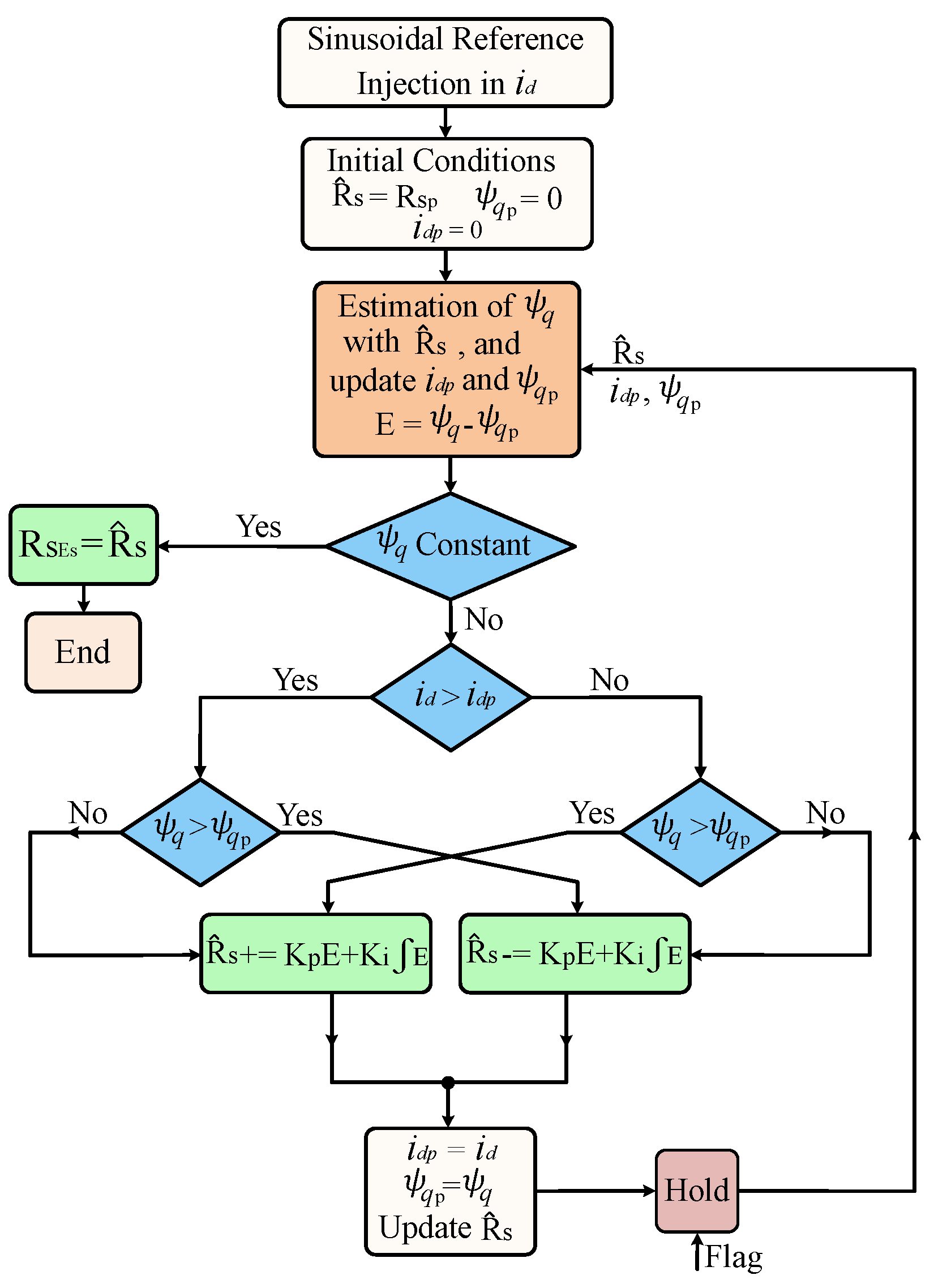
4.2. Estimation of Stator Resistance
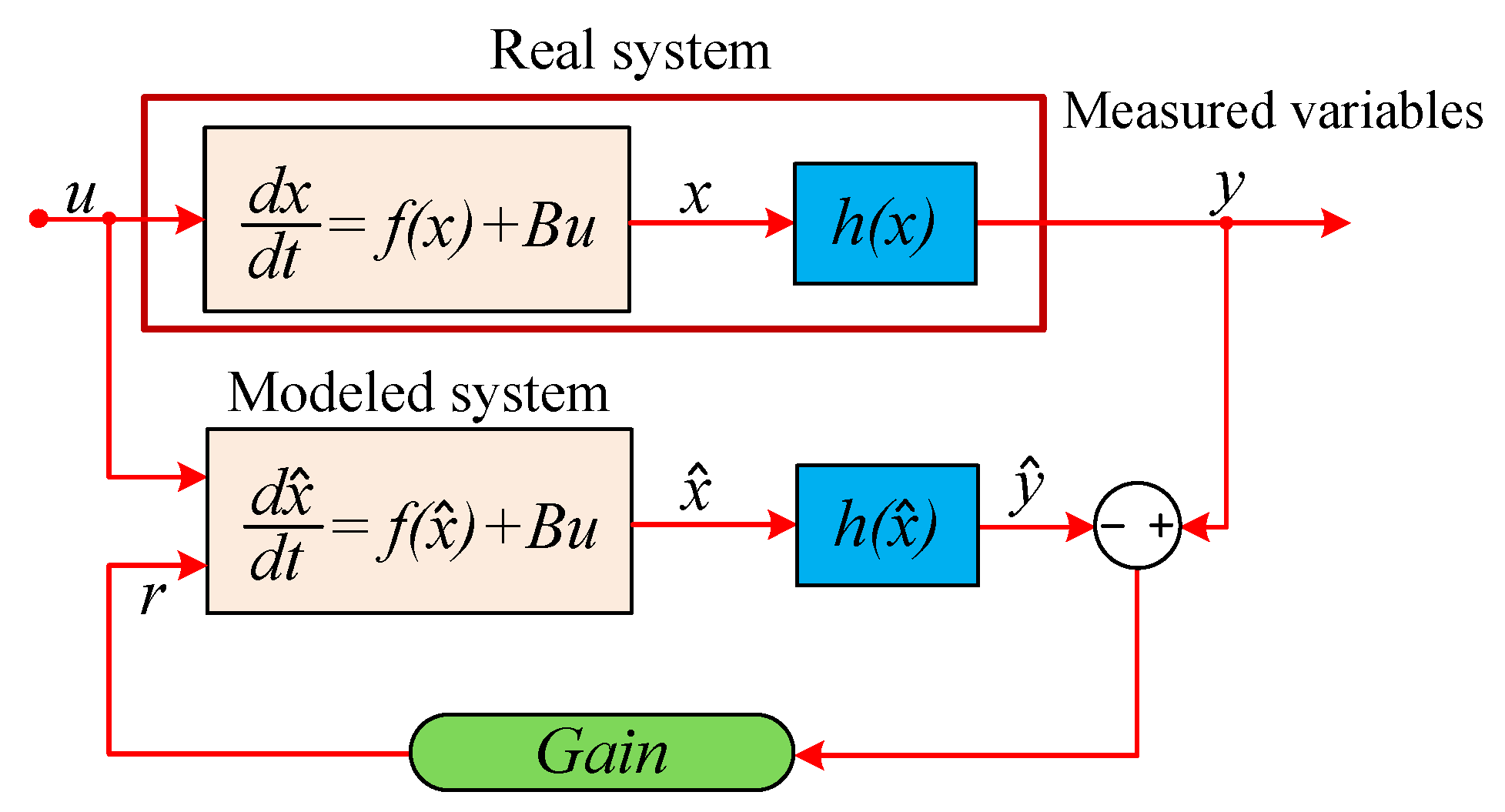
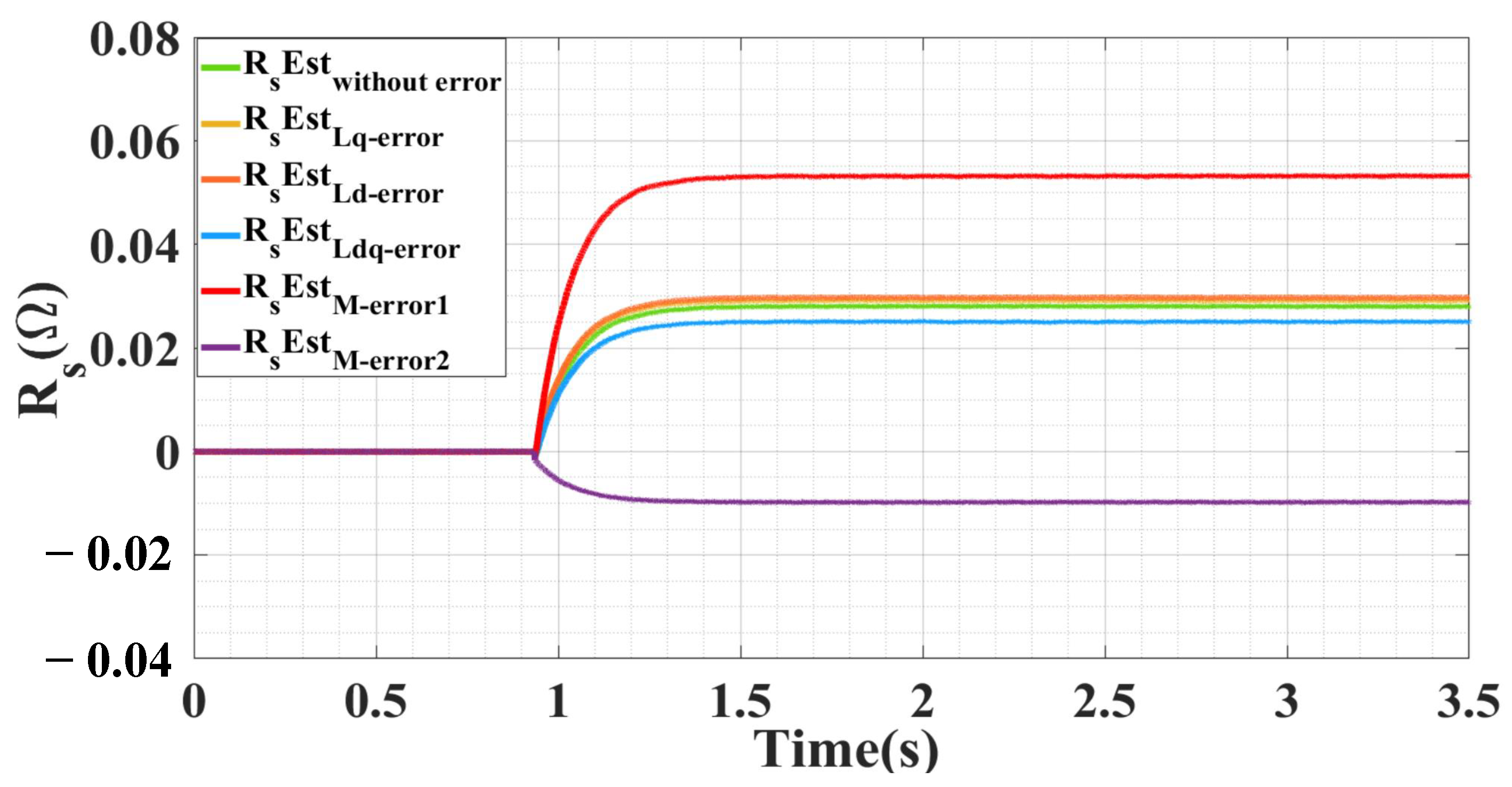
4.3. Kalman Filter Estimator
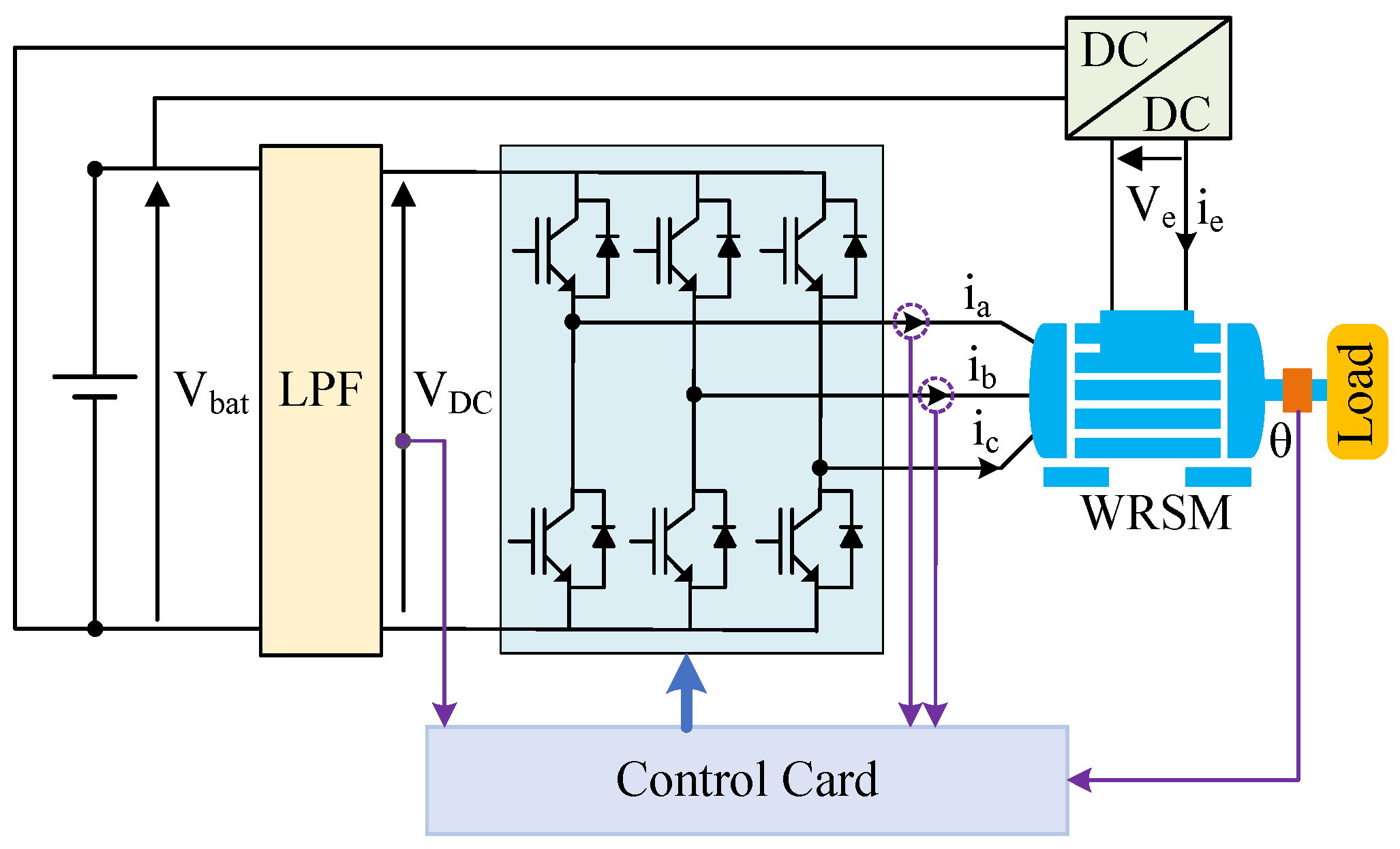
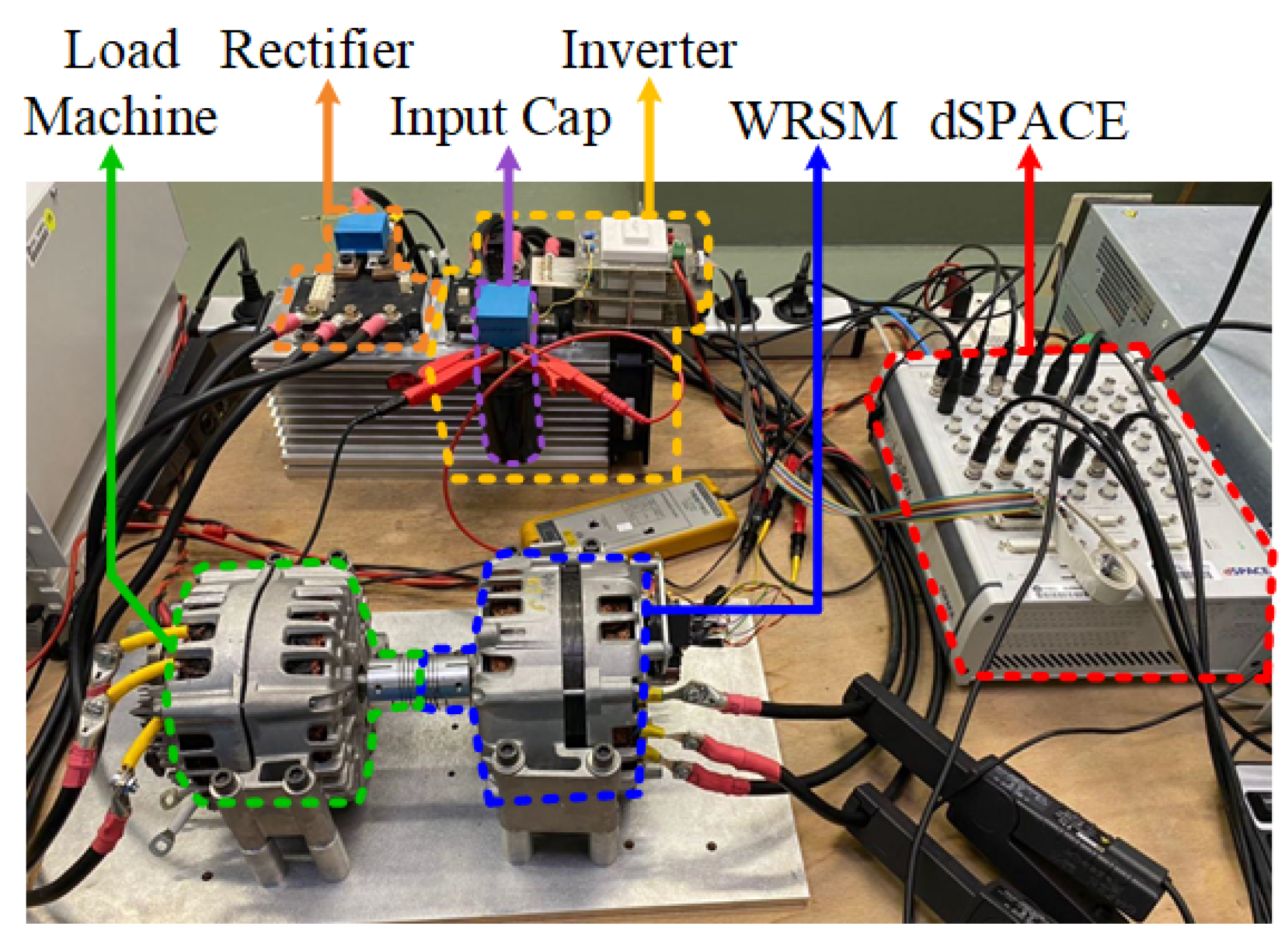
5. Experimental Results
5.1. Flux Estimation
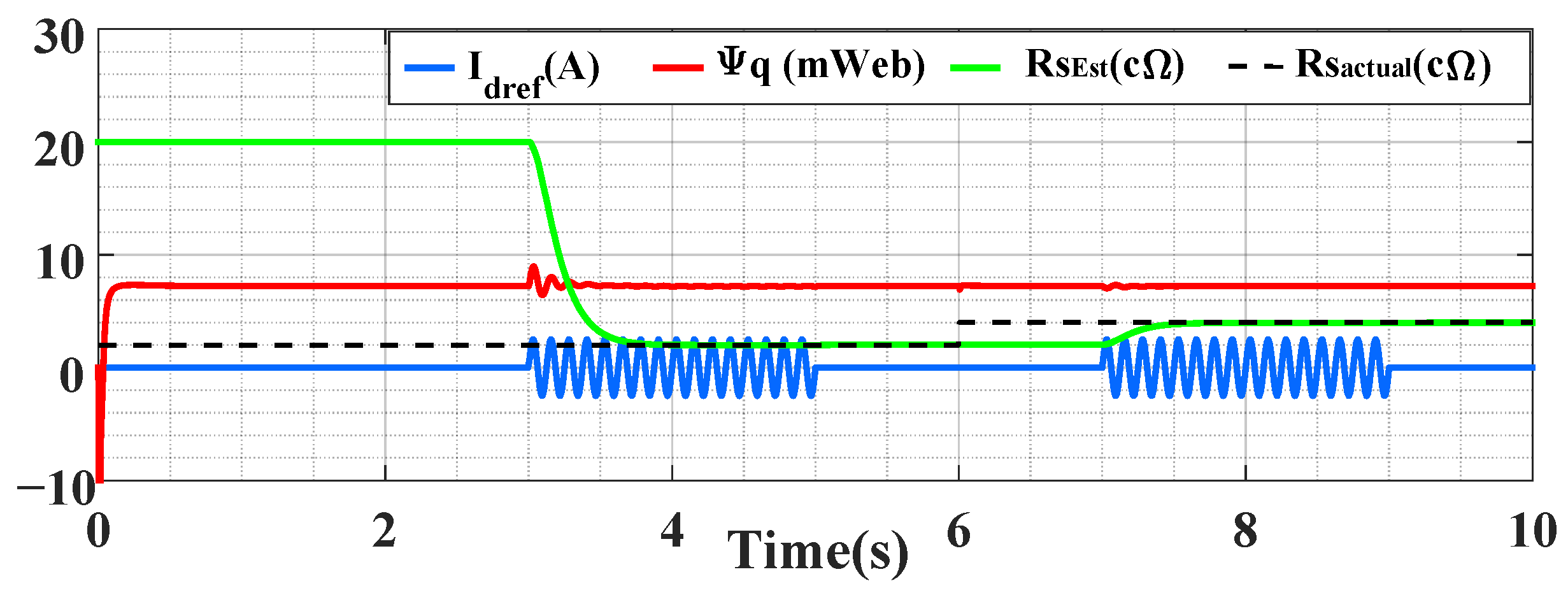
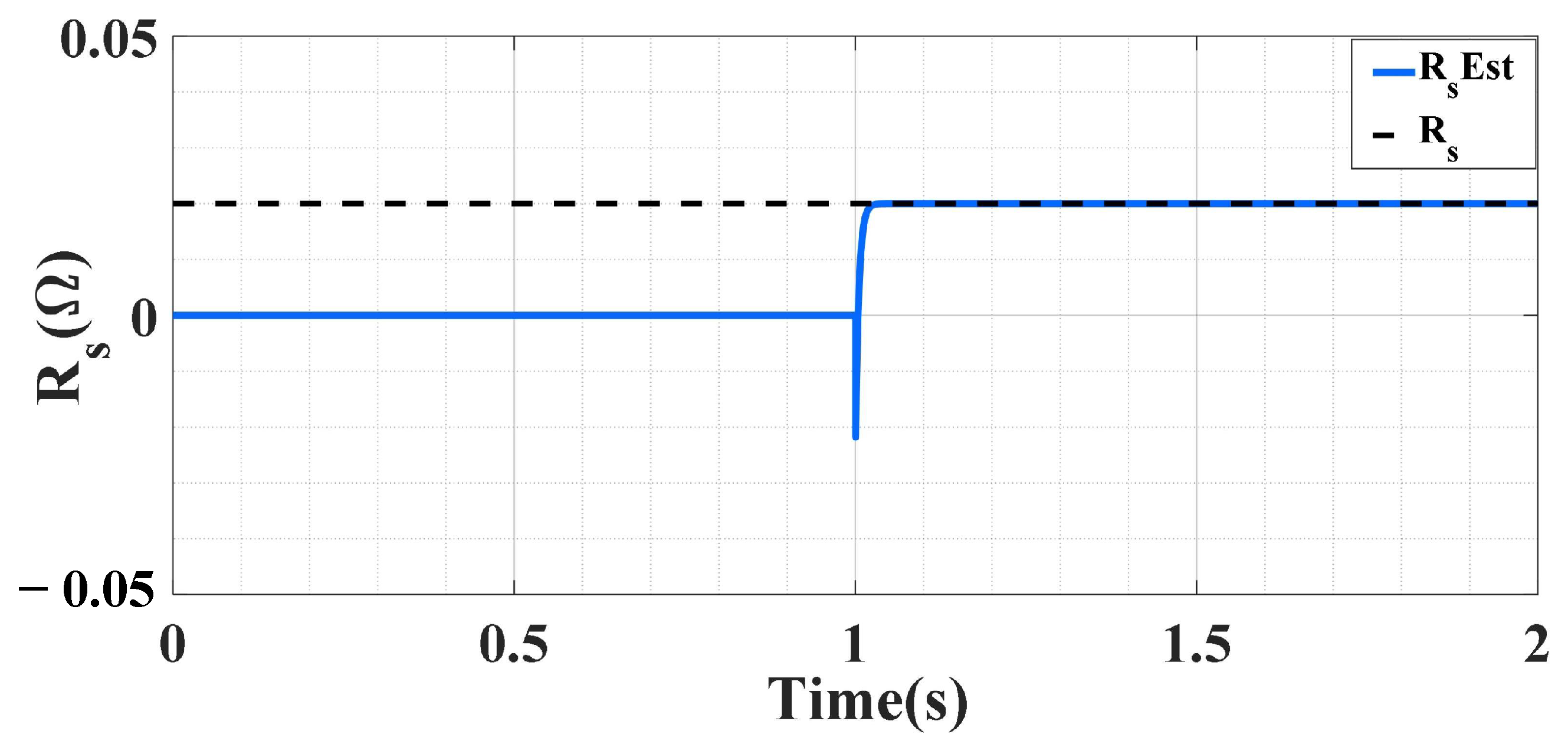
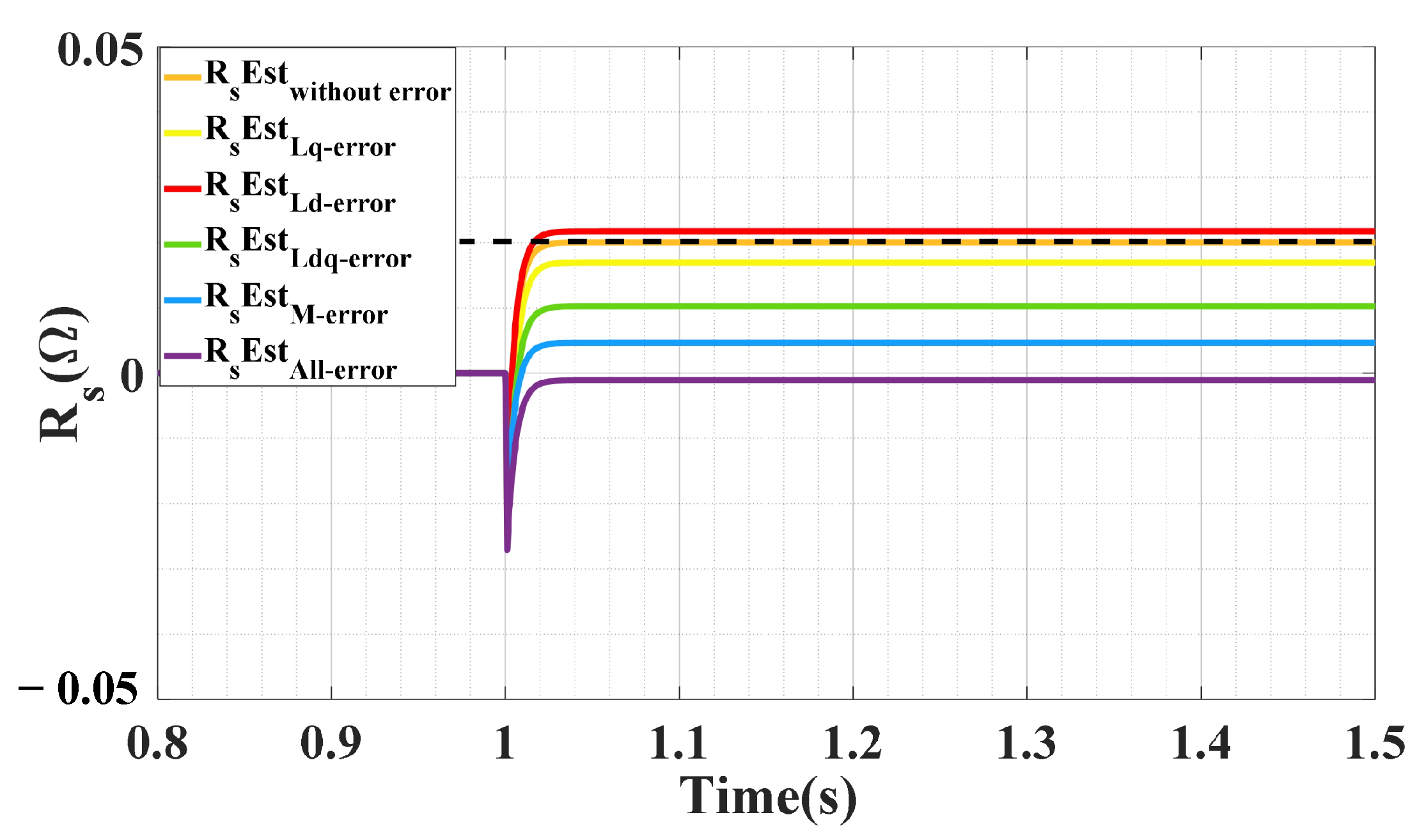
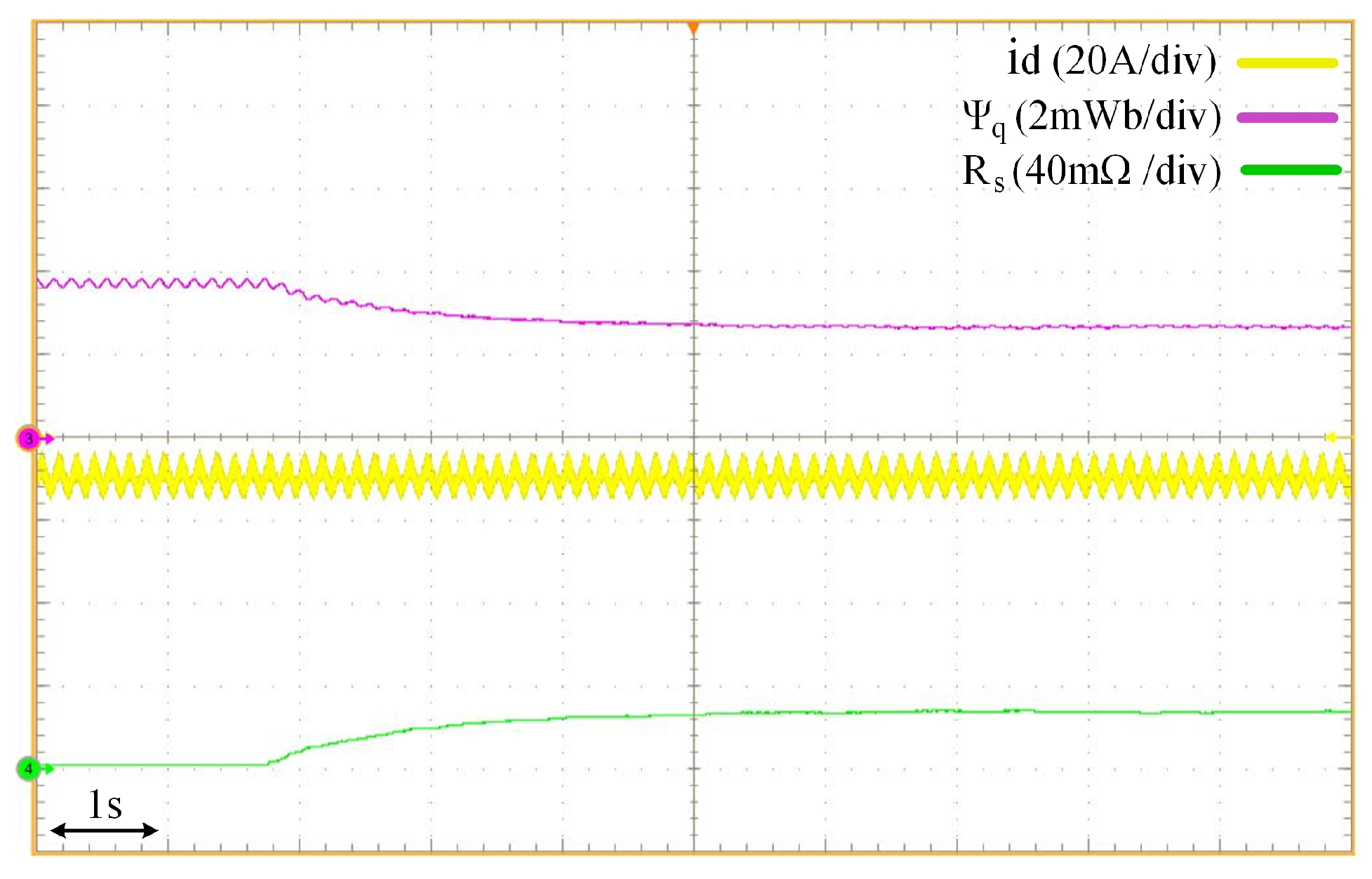
5.2. Stator Resistance Estimation
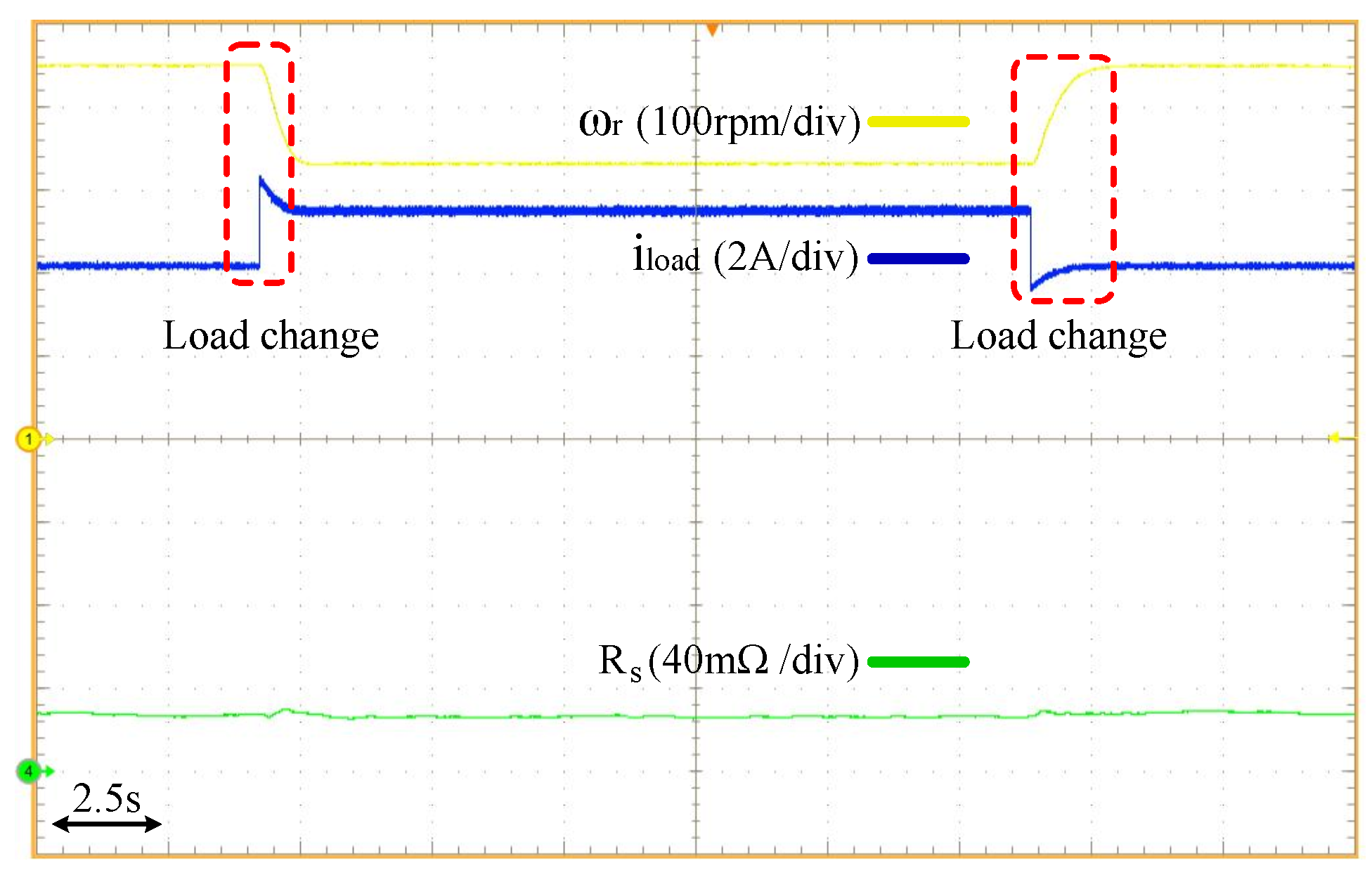
5.3. The Effect of a Sudden Change in Load
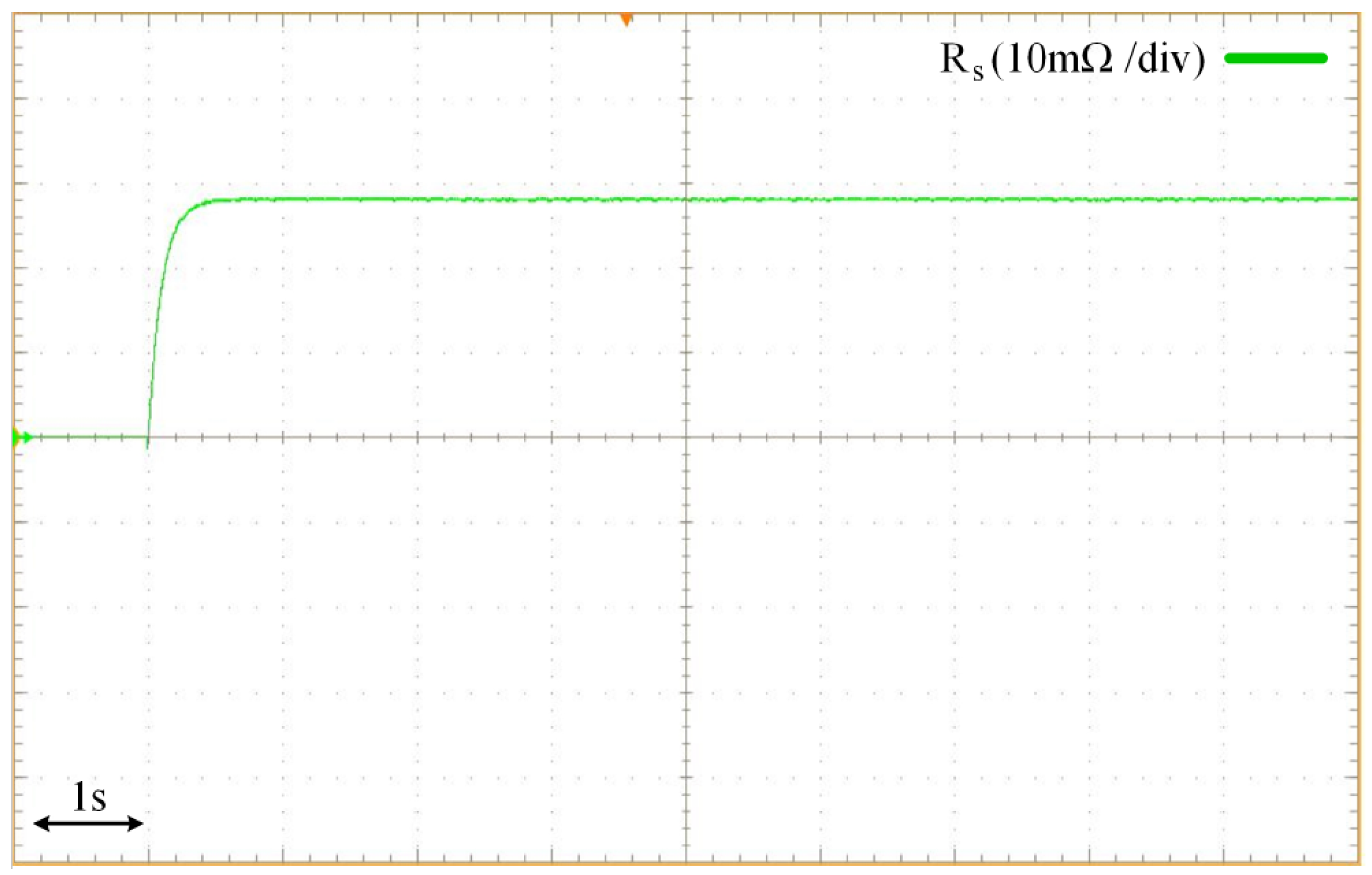
5.4. Estimation of Resistance by Kalman Observer
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Nomenclature
| WRSM | Wound Rotor Synchronous Machine |
| DTC | Direct Torque Control |
| MPC | Model Predictive Control |
| Stator resistance | |
| Stator voltage | |
| Stator current | |
| Stator flux | |
| LPF | Low-Pass Filter |
| Cutoff frequency of the LPF | |
| Gain error produced by LPF | |
| Phase error produced by LPF | |
| Synchronous angular frequency | |
| Initial resistance | |
| Error value of the resistance | |
| Estimated flux | |
| Error part of the estimated flux | |
| EKF | Extended Kalman Filter |
| Voltages in the d axis | |
| Voltages in the q axis | |
| Rotor excitation current | |
| Stator inductance on the d axis | |
| Stator inductance on the q axis | |
| M | Mutual inductance between the rotor and the stator |
References
- Tang, J.; Yang, Y.; Blaabjerg, F.; Chen, J.; Diao, L.; Liu, Z. Parameter identification of inverter-fed induction motors: A review. Energies 2018, 11, 2194. [Google Scholar] [CrossRef] [Green Version]
- Mahfoud, S.; Derouich, A.; El Ouanjli, N.; Mossa, M.A.; Bhaskar, M.S.; Lan, N.K.; Quynh, N.V. A New Robust Direct Torque Control Based on a Genetic Algorithm for a Doubly-Fed Induction Motor: Experimental Validation. Energies 2022, 15, 5384. [Google Scholar] [CrossRef]
- Corne, A.; Yang, N.; Martin, J.P.; Nahid-Mobarakeh, B.; Pierfederici, S. Nonlinear estimation of stator currents in a wound rotor synchronous machine. IEEE Trans. Ind. Appl. 2018, 54, 3858–3867. [Google Scholar] [CrossRef]
- Haghgooei, P.; Corne, A.; Jamshidpour, E.; Takorabet, N.; Khaburi, D.A.; Nahid-Mobarakeh, B. Current sensorless control for a wound rotor synchronous machine based on flux linkage model. IEEE J. Emerg. Sel. Top. Power Electron. 2021, 10, 4576–4586. [Google Scholar] [CrossRef]
- Zerdali, E. Adaptive extended Kalman filter for speed-sensorless control of induction motors. IEEE Trans. Energy Convers. 2018, 34, 789–800. [Google Scholar] [CrossRef]
- Ameid, T.; Menacer, A.; Talhaoui, H.; Harzelli, I. Rotor resistance estimation using Extended Kalman filter and spectral analysis for rotor bar fault diagnosis of sensorless vector control induction motor. Measurement 2017, 111, 243–259. [Google Scholar] [CrossRef]
- Liu, K.; Feng, J.; Guo, S.; Xiao, L.; Zhu, Z.Q. Identification of flux linkage map of permanent magnet synchronous machines under uncertain circuit resistance and inverter nonlinearity. IEEE Trans. Ind. Inform. 2017, 14, 556–568. [Google Scholar] [CrossRef]
- Saadaoui, O.; Khlaief, A.; Abassi, M.; Tlili, I.; Chaari, A.; Boussak, M. A new full-order sliding mode observer based rotor speed and stator resistance estimation for sensorless vector controlled PMSM drives. Asian J. Control. 2019, 21, 1318–1327. [Google Scholar] [CrossRef]
- Hinkkanen, M.; Harnefors, L.; Luomi, J. Reduced-order flux observers with stator-resistance adaptation for speed-sensorless induction motor drives. IEEE Trans. Power Electron. 2009, 25, 1173–1183. [Google Scholar] [CrossRef] [Green Version]
- Saejia, M.; Sangwongwanich, S. Averaging analysis approach for stability analysis of speed-sensorless induction motor drives with stator resistance estimation. IEEE Trans. Ind. Electron. 2006, 53, 162–177. [Google Scholar] [CrossRef]
- Abdelrahem, M.; Hackl, C.M.; Rodríguez, J.; Kennel, R. Model reference adaptive system with finite-set for encoderless control of PMSGs in micro-grid systems. Energies 2020, 13, 4844. [Google Scholar] [CrossRef]
- Bednarz, S.A.; Dybkowski, M. Estimation of the Induction Motor Stator and Rotor Resistance Using Active and Reactive Power Based Model Reference Adaptive System Estimator. Appl. Sci. 2019, 9, 5145. [Google Scholar] [CrossRef] [Green Version]
- Holakooie, M.H.; Ojaghi, M.; Taheri, A. Direct torque control of six-phase induction motor with a novel MRAS-based stator resistance estimator. IEEE Trans. Ind. Electron. 2018, 65, 7685–7696. [Google Scholar] [CrossRef]
- Khan, Y.A.; Verma, V. A novel method of estimating stator resistance for an F-MRAS based speed sensorless vector controlled switched reluctance motor drive. In Proceedings of the 2019 54th International Universities Power Engineering Conference (UPEC), Bucharest, Romania, 3–6 September 2019; pp. 1–6. [Google Scholar]
- Sivakumar, M.; Thanakodi, T.; Selvam, N.P. Comparative Analysis of Stator Resistance Estimators in DTC-CSI Fed IM Drive. Int. J. Appl. Eng. Res. 2018, 13, 12364–12372. [Google Scholar]
- Rashed, M.; MacConnell, P.F.; Stronach, A.F.; Acarnley, P. Sensorless indirect-rotor-field-orientation speed control of a permanent-magnet synchronous motor with stator-resistance estimation. IEEE Trans. Ind. Electron. 2007, 54, 1664–1675. [Google Scholar] [CrossRef]
- Heidari, H.; Rassolkin, A.; Holakooie, M.H.; Vaimann, T.; Kallaste, A.; Belahcen, A.; Lukichev, D.V. A parallel estimation system of stator resistance and rotor speed for active disturbance rejection control of six-phase induction motor. Energies 2020, 13, 1121. [Google Scholar] [CrossRef]
- Vazifedan, M.; Zarchi, H.A. A Stator Resistance Estimation Algorithm For Sensorless Dual Stator Winding Induction Machine Drive Using Model Reference Adaptive System. In Proceedings of the 11th Power Electronics, Drive Systems, and Technologies Conference (PEDSTC), Tehran, Iran, 4–6 February 2020; pp. 1–7. [Google Scholar]
- Khadar, S.; Kouzou, A.; Benguesmia, H. Fuzzy stator resistance estimator of induction motor fed by a three levels NPC inverter controlled by direct torque control. In Proceedings of the 2018 International Conference on Applied Smart Systems (ICASS), Medea, Algeria, 24–25 November 2018; pp. 1–7. [Google Scholar]
- Luo, C.; Wang, B.; Yu, Y.; Chen, C.; Huo, Z.; Xu, D. Decoupled stator resistance estimation for speed-sensorless induction motor drives considering speed and load torque variations. IEEE J. Emerg. Sel. Top. Power Electron. 2019, 8, 1193–1207. [Google Scholar] [CrossRef]
- Liang, D.; Li, J.; Qu, R. Sensorless control of permanent magnet synchronous machine based on second-order sliding-mode observer with online resistance estimation. IEEE Trans. Ind. Appl. 2017, 53, 3672–3682. [Google Scholar] [CrossRef]
- Haghgooei, P.; Jamshidpour, E.; Takorabet, N.; Arab-khaburi, D.; Nahid-Mobarakeh, B. Magnetic Model Identification of Wound Rotor Synchronous Machine Using a Novel Flux Estimator. IEEE Trans. Ind. Appl. 2021, 57, 5389–5399. [Google Scholar] [CrossRef]
- Zhang, P.; Lu, B.; Habetler, T.G. A remote and sensorless stator winding resistance estimation method for thermal protection of soft-starter-connected induction machines. IEEE Trans. Ind. Electron. 2008, 55, 3611–3618. [Google Scholar] [CrossRef]
- Lazcano, U.; Poza, J.; Garramiola, F.; Rivera, C.A.; Iturbe, I. Double Dead-Time Signal Injection Strategy for Stator Resistance Estimation of Induction Machines. Appl. Sci. 2022, 12, 8812. [Google Scholar] [CrossRef]
- Baneira, F.; Asiminoaei, L.; Doval-Gandoy, J.; Delpino, H.A.M.; Yepes, A.G.; Godbersen, J. Estimation method of stator winding resistance for induction motor drives based on DC-signal injection suitable for low inertia. IEEE Trans. Power Electron. 2018, 34, 5646–5654. [Google Scholar] [CrossRef]
- Underwood, S.J.; Husain, I. Online parameter estimation and adaptive control of permanent-magnet synchronous machines. IEEE Trans. Ind. Electron. 2009, 57, 2435–2443. [Google Scholar] [CrossRef]
- Reigosa, D.D.; Fernandez, D.; Zhu, Z.Q.; Briz, F. PMSM magnetization state estimation based on stator-reflected PM resistance using high-frequency signal injection. IEEE Trans. Ind. Appl. 2015, 51, 3800–3810. [Google Scholar] [CrossRef]
- Baghli, L.; Al-Rouh, I.; Rezzoug, A. Signal analysis and identification for induction motor sensorless control. Control. Eng. Pract. 2006, 14, 1313–1324. [Google Scholar] [CrossRef]
- Boroujeni, S.T.; Takorabet, N.; Mezani, S.; Lubin, T.; Haghgooie, P. Using and enhancing the cogging torque of PM machines in valve positioning applications. IET Electr. Power Appl. 2020, 14, 2516–2524. [Google Scholar] [CrossRef]
- Liu, K.; Zhu, Z.Q.; Stone, D.A. Parameter estimation for condition monitoring of PMSM stator winding and rotor permanent magnets. IEEE Trans. Ind. Electron. 2013, 60, 5902–5913. [Google Scholar] [CrossRef] [Green Version]
- Wu, X.; Feng, Y.; Liu, X.; Huang, S.; Yuan, X.; Gao, J.; Zheng, J. Initial rotor position detection for sensorless interior PMSM with square-wave voltage injection. IEEE Trans. Magn. 2017, 53, 1–4. [Google Scholar] [CrossRef]
- Zhang, X.; Li, H.; Yang, S.; Ma, M. Improved initial rotor position estimation for PMSM drives based on HF pulsating voltage signal injection. IEEE Trans. Ind. Electron. 2017, 65, 4702–4713. [Google Scholar] [CrossRef]
- Idris, N.R.N.; Yatim, A.H.M. An improved stator flux estimation in steady-state operation for direct torque control of induction machines. IEEE Trans. Ind. Appl. 2002, 38, 110–116. [Google Scholar] [CrossRef]
- Shin, M.H.; Hyun, D.S.; Cho, S.B.; Choe, S.Y. An improved stator flux estimation for speed sensorless stator flux orientation control of induction motors. IEEE Trans. Power Electron. 2000, 15, 312–318. [Google Scholar] [CrossRef]
- Yildiz, R.; Barut, M.; Zerdali, E. A comprehensive comparison of extended and unscented Kalman filters for speed-sensorless control applications of induction motors. IEEE Trans. Ind. Inform. 2020, 16, 6423–6432. [Google Scholar] [CrossRef]






















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Symbol | Value |
|---|---|---|
| Stator resistance | 20 m | |
| d-axis inductance | 80 H | |
| q-axis inductance | 80 H | |
| Mutual inductance between rotor and stator | M | 3 mH |
| Number of pole pairs | 6 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Haghgooei, P.; Jamshidpour, E.; Corne, A.; Takorabet, N.; Khaburi, D.A.; Baghli, L.; Nahid-Mobarakeh, B. A Parameter-Free Method for Estimating the Stator Resistance of a Wound Rotor Synchronous Machine. World Electr. Veh. J. 2023, 14, 65. https://doi.org/10.3390/wevj14030065
Haghgooei P, Jamshidpour E, Corne A, Takorabet N, Khaburi DA, Baghli L, Nahid-Mobarakeh B. A Parameter-Free Method for Estimating the Stator Resistance of a Wound Rotor Synchronous Machine. World Electric Vehicle Journal. 2023; 14(3):65. https://doi.org/10.3390/wevj14030065
Chicago/Turabian StyleHaghgooei, Peyman, Ehsan Jamshidpour, Adrien Corne, Noureddine Takorabet, Davood Arab Khaburi, Lotfi Baghli, and Babak Nahid-Mobarakeh. 2023. "A Parameter-Free Method for Estimating the Stator Resistance of a Wound Rotor Synchronous Machine" World Electric Vehicle Journal 14, no. 3: 65. https://doi.org/10.3390/wevj14030065