
Virtual Flux Voltage-Oriented Vector Control Method of Wide Frequency Active Rectifiers Based on Dual Low-Pass Filter


Abstract
:1. Introduction
2. PWM Rectifier Model Based on Virtual Flux
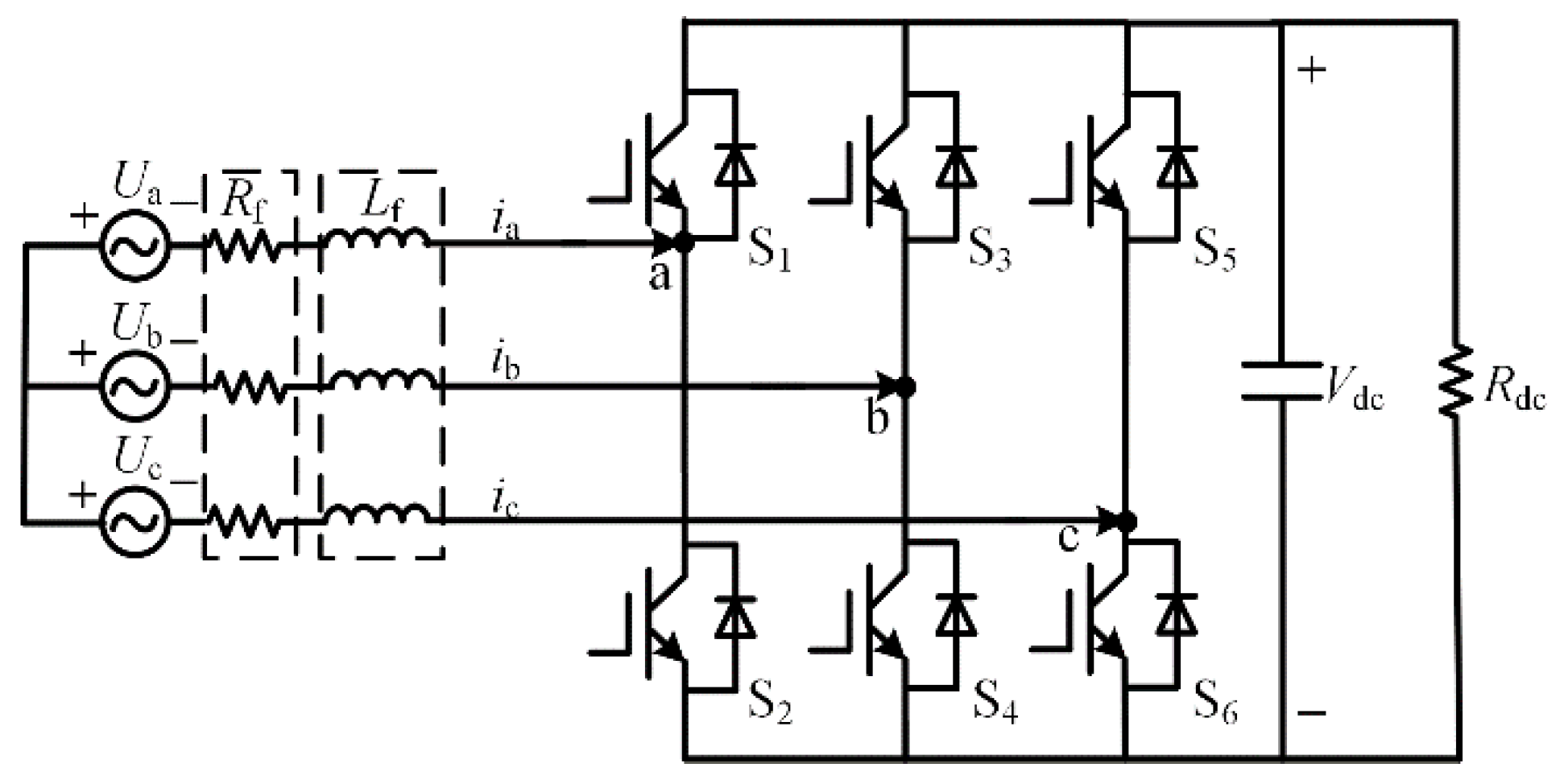
2.1. Mathematical Model of Three-Phase PWM Rectifier
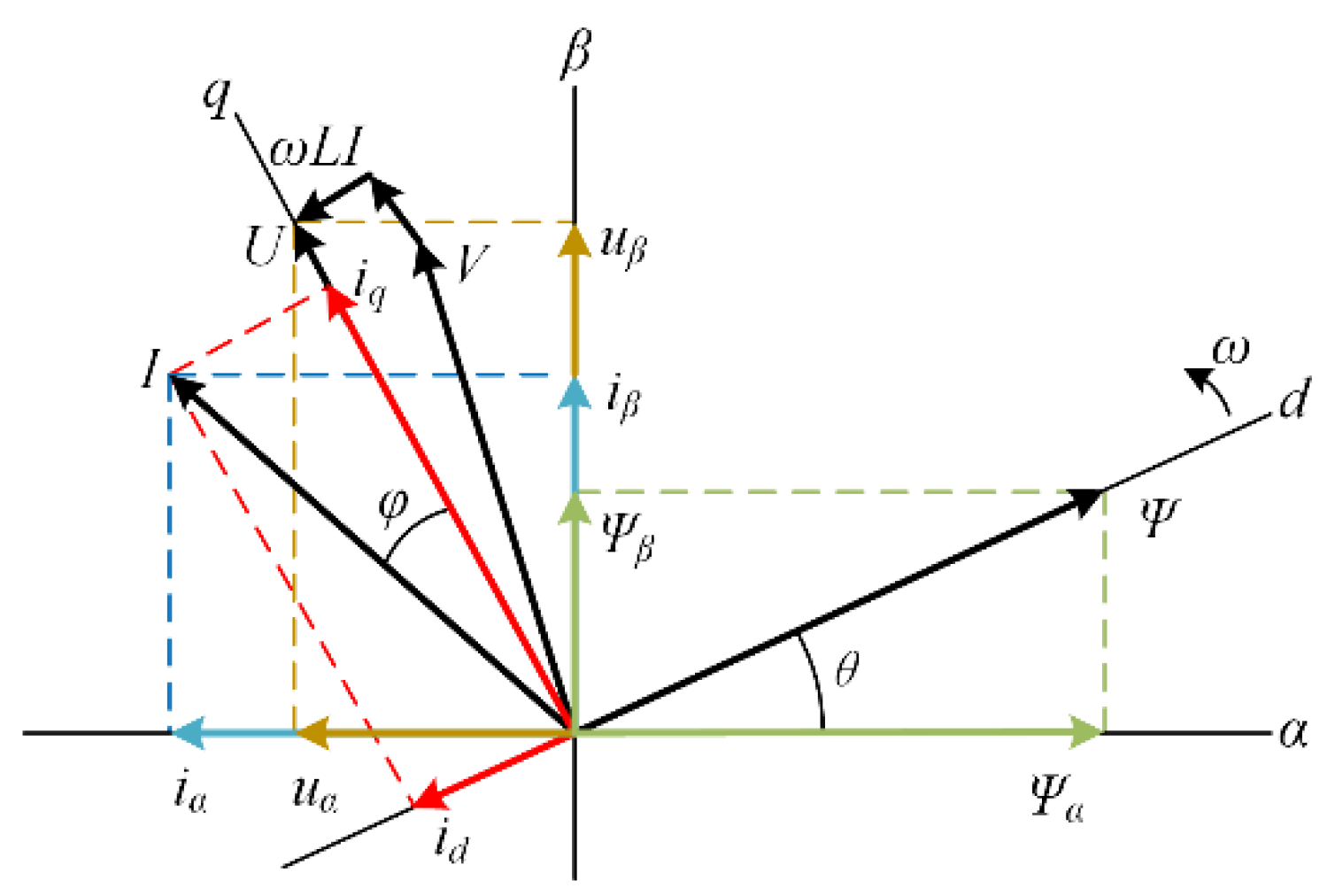
2.2. Model of Mathematics Based on Virtual Flux
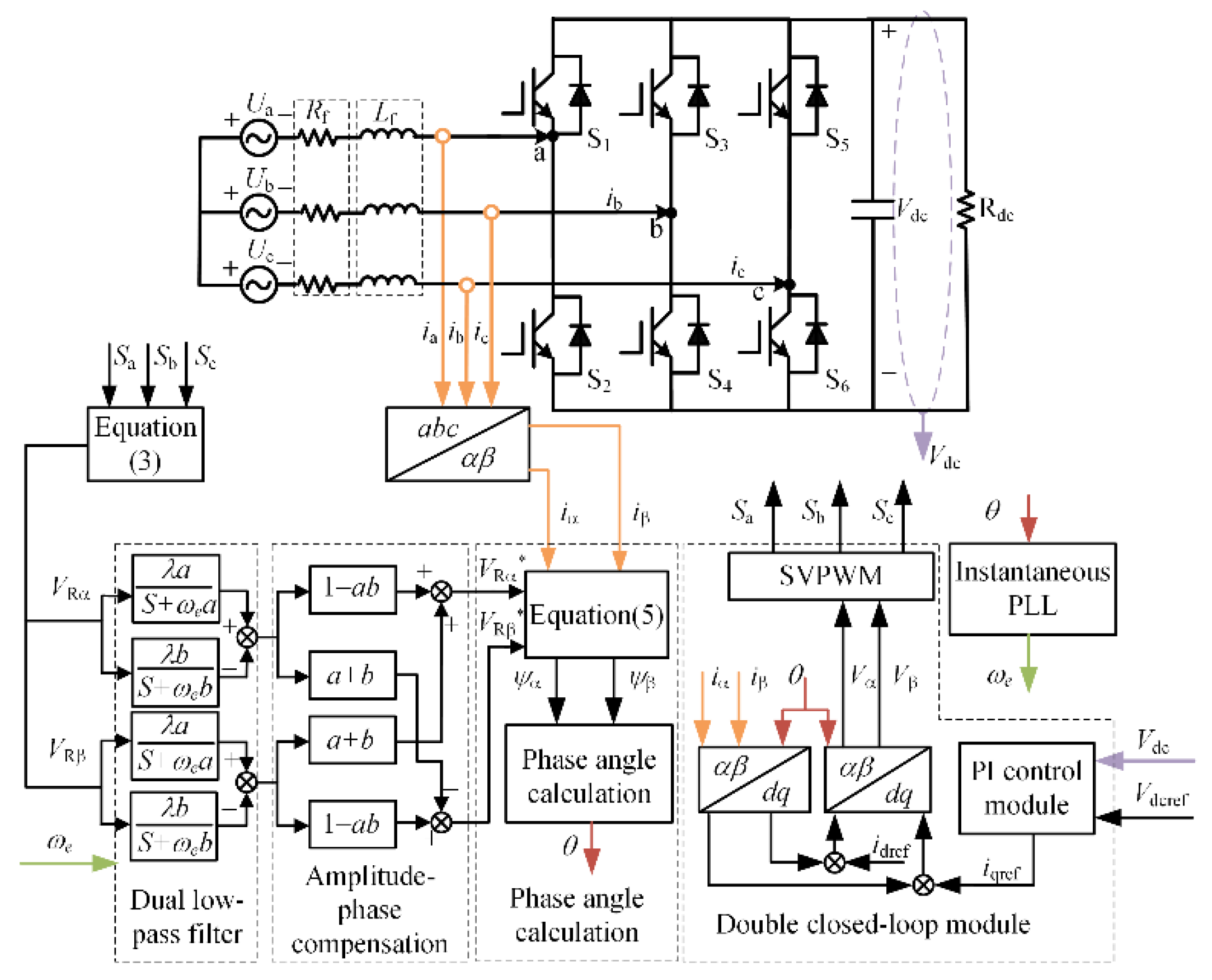
3. Wide Frequency Active Rectifier Control Strategy
3.1. Problems with Traditional Virtual Flux Observers
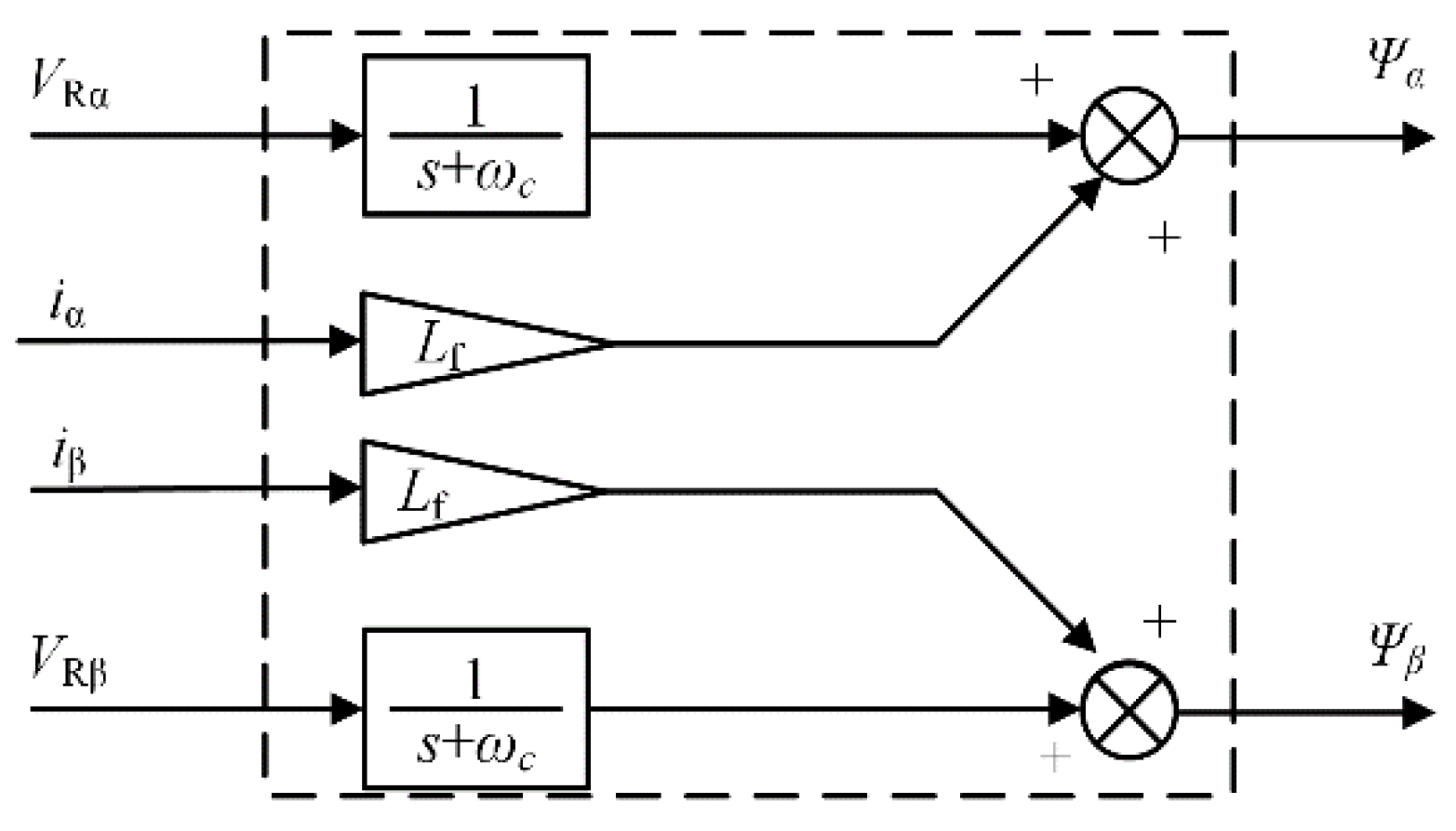
3.2. Dual Low-Pass Filter Design
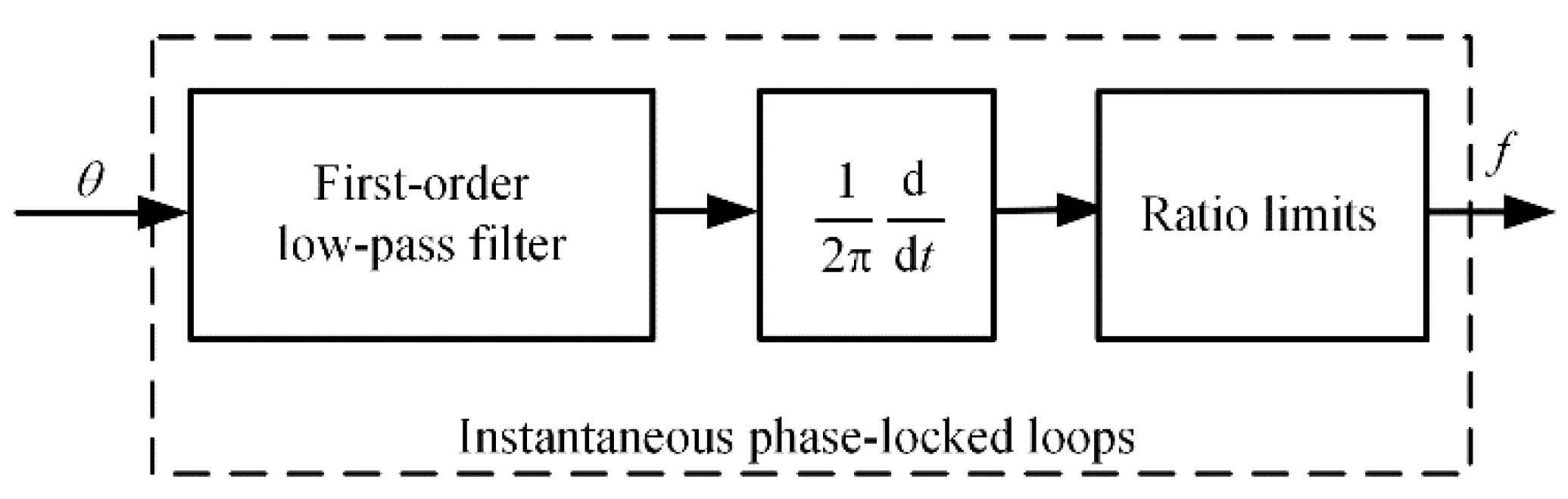
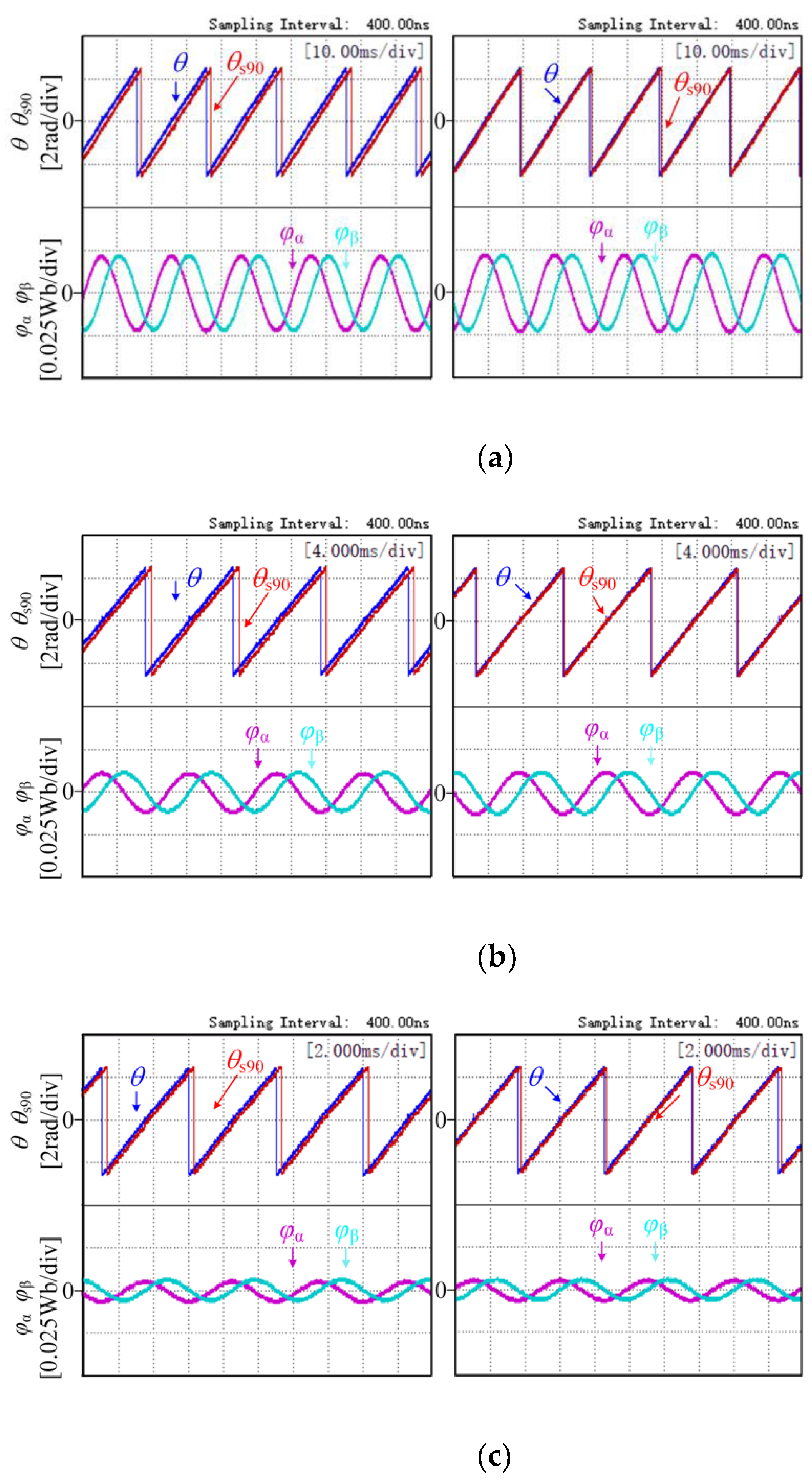
3.3. Phase Angle Calculation and Instantaneous Phase-Locked Loop Design
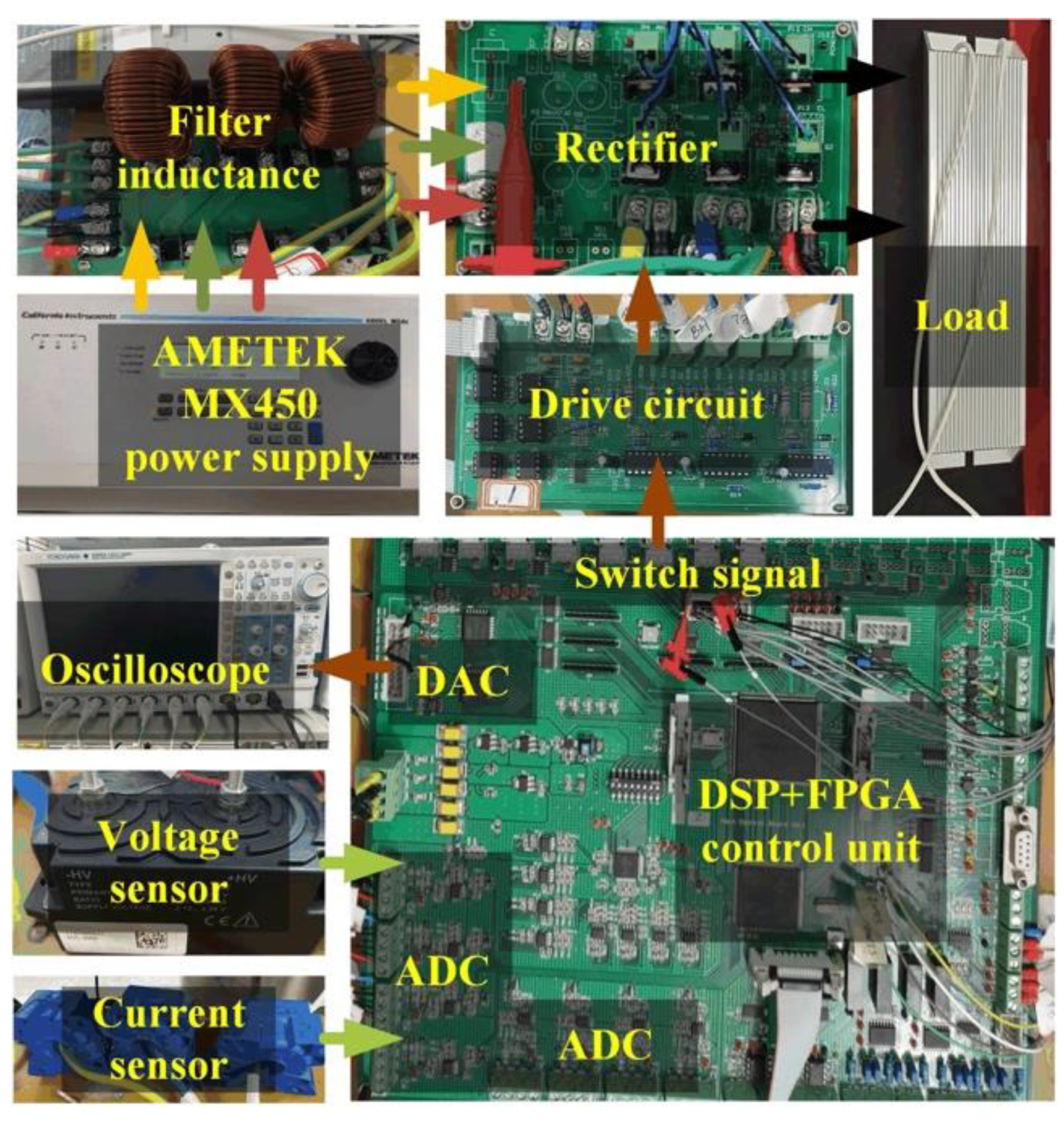
4. Experimental Results and Analysis
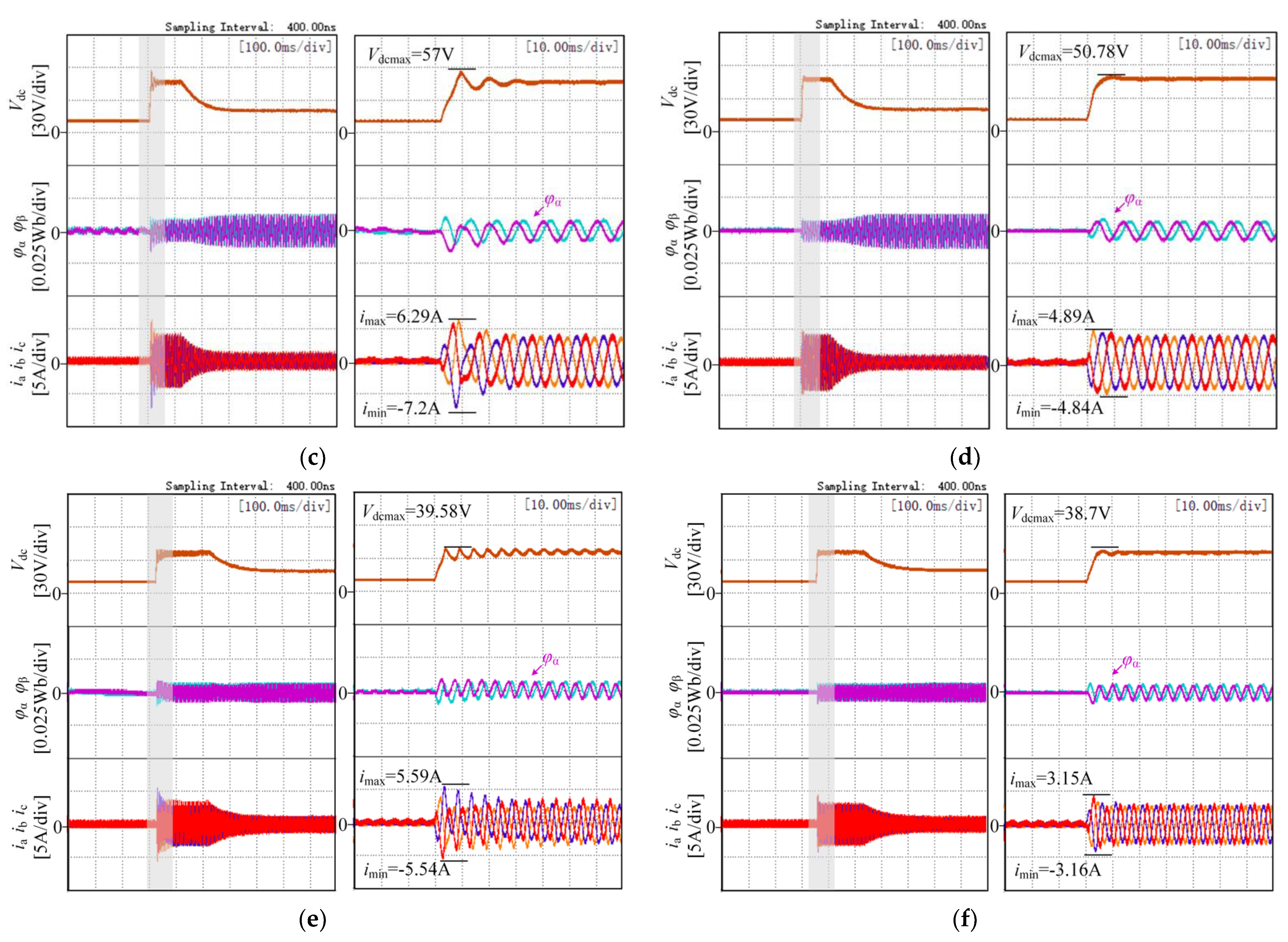
4.1. Start-Up Comparison Experiments
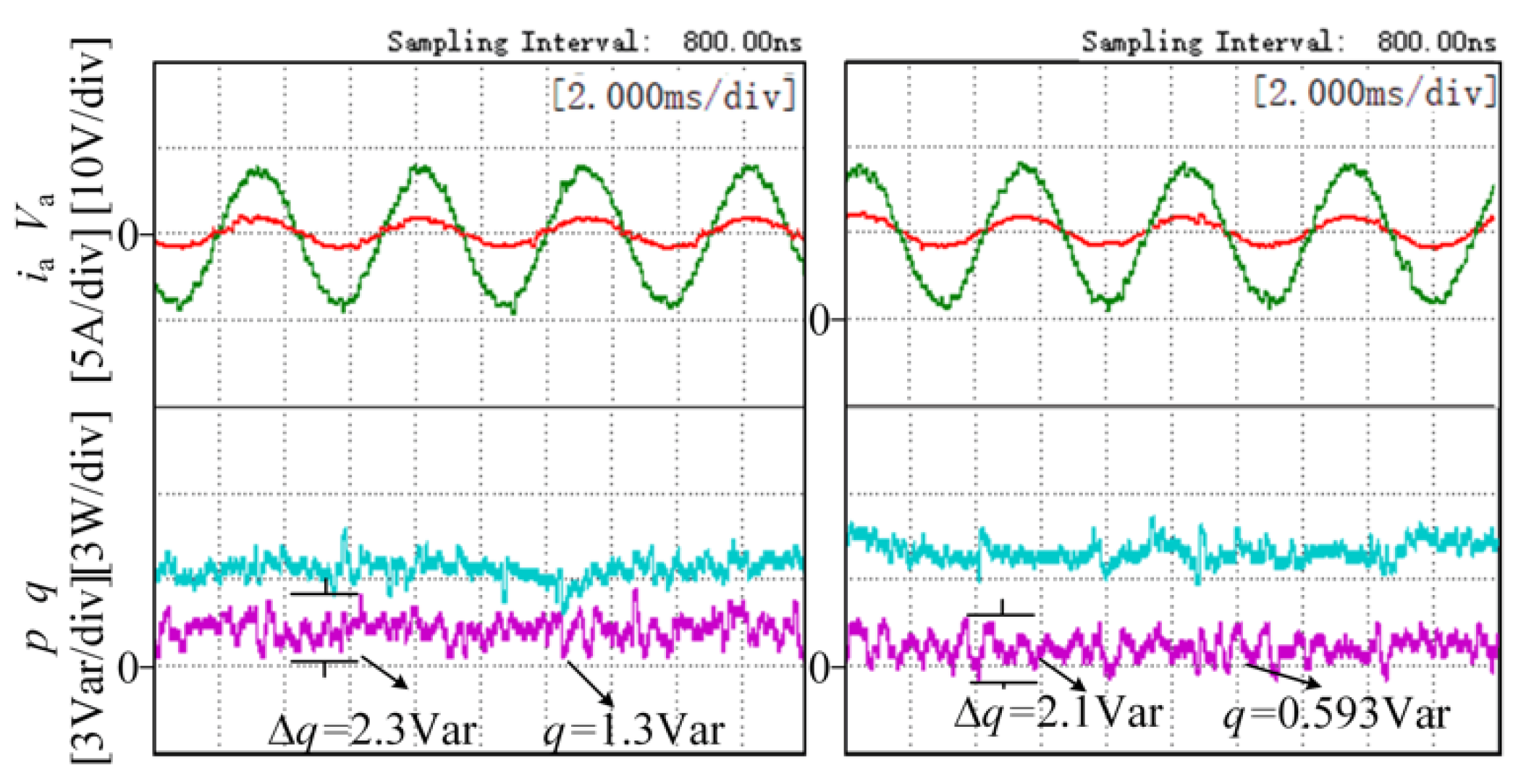
4.2. Comparison Experiments of Steady-State of the System
5. Conclusions
- The proposed method eliminates the need to calculate the initial value of the virtual flux by using a dual low-pass filter for integration, without the problems of DC bias errors or amplitude-phase error.
- The strategy uses an instantaneous phase-locked loop that can quickly detect the frequency and feedback to the dual low-pass filter. Therefore, the strategy ensures the normal operation of the power system of More Electric Aircraft under wide frequency conditions.
Author Contributions
Funding
Conflicts of Interest
References
- Cao, W.; Mecrow, B.C.; Atkinson, G.J.; Bennett, J.W.; Atkinson, D.J. Overview of Electric Motor Technologies Used for More Electric Aircraft (MEA). IEEE Trans. Ind. Electron. 2012, 59, 3523–3531. [Google Scholar] [CrossRef]
- Rosero, J.A.; Ortega, J.A.; Aldabas, E.; Romeral, L. Moving towards a more electric aircraft. IEEE Aerosp. Electron. Syst. Mag. 2007, 22, 3–9. [Google Scholar] [CrossRef] [Green Version]
- Sarlioglu, B.; Morris, C.T. More Electric Aircraft: Review, Challenges, and Opportunities for Commercial Transport Aircraft. IEEE Trans. Transp. Electrif. 2015, 1, 54–64. [Google Scholar] [CrossRef]
- Tarisciotti, L.; Zanchetta, P.; Watson, A.; Clare, J.C.; Degano, M.; Bifaretti, S. Modulated Model Predictive Control for a Three-Phase Active Rectifier. IEEE Trans. Ind. Appl. 2015, 51, 1610–1620. [Google Scholar] [CrossRef]
- Zou, J.; Wang, C.; Cheng, H.; Liu, J. Triple Line-Voltage Cascaded VIENNA Converter Applied as the Medium-Voltage AC Drive. Energies 2018, 11, 1079. [Google Scholar] [CrossRef] [Green Version]
- Xia, C.; Liu, T.; Shi, T.; Song, Z. A Simplified Finite-Control-Set Model-Predictive Control for Power Converters. IEEE Trans. Ind. Inform. 2014, 10, 991–1002. [Google Scholar] [CrossRef]
- Kang, L.; Zhang, J.; Zhou, H.; Zhao, Z.; Duan, X. Model Predictive Current Control with Fixed Switching Frequency and Dead-Time Compensation for Single-Phase PWM Rectifier. Electronics 2021, 10, 426. [Google Scholar] [CrossRef]
- Gonçalves, J.T.; Valtchev, S.; Melicio, R.; Gonçalves, A.; Blaabjerg, F. Hybrid Three-Phase Rectifiers with Active Power Factor Correction: A Systematic Review. Electronics 2021, 10, 1520. [Google Scholar] [CrossRef]
- Mukherjee, D.; Kastha, D. Voltage Sensorless Control of VIENNA Rectifier in the Input Current Oriented Reference Frame. IEEE Trans. Power Electron. 2019, 34, 8079–8091. [Google Scholar] [CrossRef]
- Upamanyu, K.; Ameta, C.; Narayanan, G. Simplified Input Voltage Sensorless Vector Control for PWM Rectifiers. IEEE Trans. Ind. Appl. 2020, 56, 4051–4060. [Google Scholar] [CrossRef]
- Yang, H.; Zhang, Y.; Liang, J.; Gao, J.; Walker, P.D.; Zhang, N. Sliding-Mode Observer Based Voltage-Sensorless Model Predictive Power Control of PWM Rectifier Under Unbalanced Grid Conditions. IEEE Trans. Ind. Appl. 2018, 65, 5550–5556. [Google Scholar] [CrossRef] [Green Version]
- Kukkola, J.; Hinkkanen, M. State Observer for Grid-Voltage Sensorless Control of a Converter Equipped with an LCL Filter: Direct Discrete-Time Design. IEEE Trans. Ind. Appl. 2016, 52, 3133–3145. [Google Scholar] [CrossRef]
- Malinowski, M.; Bernet, S. A Simple Voltage Sensorless Active Damping Scheme for Three-Phase PWM Converters with an LCL Filter. IEEE Trans. Ind. Electron. 2008, 55, 1876–1880. [Google Scholar] [CrossRef]
- Malinowski, M.; Kazmierkowski, M.P.; Hansen, S.; Blaabjerg, F.; Marques, G.D. Virtual-flux-based Direct Power Control of Three-phase PWM Rectifiers. IEEE Trans. Ind. Appl. 2001, 37, 1019–1027. [Google Scholar] [CrossRef]
- Liang, J.; Wang, H.; Yan, Z. Grid Voltage Sensorless Model-Based Predictive Power Control of PWM Rectifiers Based on Sliding Mode Virtual Flux Observer. IEEE Access 2019, 7, 24007–24016. [Google Scholar] [CrossRef]
- Zhao, R.; He, Y. Virtual Line-flux-linkage Oriented Vector Control of Three-phase Voltage Source PWM Rectifier without line Voltage Sensors. Proc. CSEE 2005, 25, 56–61. (In Chinese) [Google Scholar]
- Zhang, X.; Tan, G.; Fang, J.; Han, Y. Controllable Rectifier based on a novel Virtual Line-flux-linkage Ob-server. Power Electron. 2008, 42, 74–75. (In Chinese) [Google Scholar]
- Bu, W.S.; Xu, L.L. Improved Virtual-Flux-Linkage Observation Method of PWM Rectifier. Appl. Mech. Mater. 2014, 678, 528–532. [Google Scholar] [CrossRef]
- Zhang, H.; Zhu, X.; Shi, J.; Tan, L.; Zhang, C.; Hu, K. Study on PWM Rectifier Without Grid Voltage Sensor Based on Virtual Flux Delay Compensation Algorithm. IEEE Trans. Power Electr. 2019, 34, 849–862. [Google Scholar] [CrossRef]
- Suul, J.A.; Luna, A.; Rodriguez, P.; Undeland, T. Voltage-Sensor-Less Synchronization to Unbalanced Grids by Frequency-Adaptive Virtual Flux Estimation. IEEE Trans. Ind. Electron. 2012, 59, 2910–2923. [Google Scholar] [CrossRef]
- Norniella, J.G.; Cano, J.M.; Orcajo, G.A.; Rojas, C.H.; Pedrayes, J.F.; Cabanas, M.F.; Melero, M.G. Improving the Dynamics of Virtual-Flux-Based Control of Three-Phase Active Rectifiers. IEEE Trans. Ind. Electron. 2014, 61, 177–187. [Google Scholar] [CrossRef]
- Lin, Z.; Li, X.; Wang, Z.; Shi, T.; Xia, C. Minimization of Additional High-Frequency Torque Ripple for Square-Wave Voltage Injection IPMSM Sensorless Drives. IEEE Trans. Power Electron. 2020, 35, 13345–13355. [Google Scholar] [CrossRef]
- Song, Z.S.; Chen, W.; Xia, C. Predictive Direct Power Control for Three-Phase Grid-Connected Converters Without Sector Information and Voltage Vector Selection. IEEE Trans. Power Electron. 2014, 29, 5518–5531. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Symbols | Values |
|---|---|---|
| DC-side voltage | Vdc | 20 V |
| AC side phase voltage | Va | 5.5 V |
| Filter inductor | Lf | 2.1 mH |
| Stray resistors | Rf | 0.1 Ω |
| Resistive load | Rdc | 72.9 Ω |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bi, K.; Xu, Y.; Zeng, P.; Chen, W.; Li, X. Virtual Flux Voltage-Oriented Vector Control Method of Wide Frequency Active Rectifiers Based on Dual Low-Pass Filter. World Electr. Veh. J. 2022, 13, 35. https://doi.org/10.3390/wevj13020035
Bi K, Xu Y, Zeng P, Chen W, Li X. Virtual Flux Voltage-Oriented Vector Control Method of Wide Frequency Active Rectifiers Based on Dual Low-Pass Filter. World Electric Vehicle Journal. 2022; 13(2):35. https://doi.org/10.3390/wevj13020035
Chicago/Turabian StyleBi, Kai, Yamei Xu, Pin Zeng, Wei Chen, and Xinmin Li. 2022. "Virtual Flux Voltage-Oriented Vector Control Method of Wide Frequency Active Rectifiers Based on Dual Low-Pass Filter" World Electric Vehicle Journal 13, no. 2: 35. https://doi.org/10.3390/wevj13020035