

A Game-Theoretic Rent-Seeking Framework for Improving Multipath TCP Performance †



Abstract
:1. Introduction
Motivation and Contributions
- We design a utility function for MPTCP based on Tullock’s rent-seeking game.
- We prove that this utility function implies a unique and stable solution to the MPTCP optimization problem.
- We examine the convergence of no-regret learning in the underlying network games.
- We provide extensive experimental results showing the performance of our MPTCP algorithm.
2. Model Overview
2.1. Background and Related Work
2.2. Our Proposed Scheme
- ∘
- For each packet loss on path i, update ;
- ∘
- For each new acknowledgment received on path i, increase using , where:
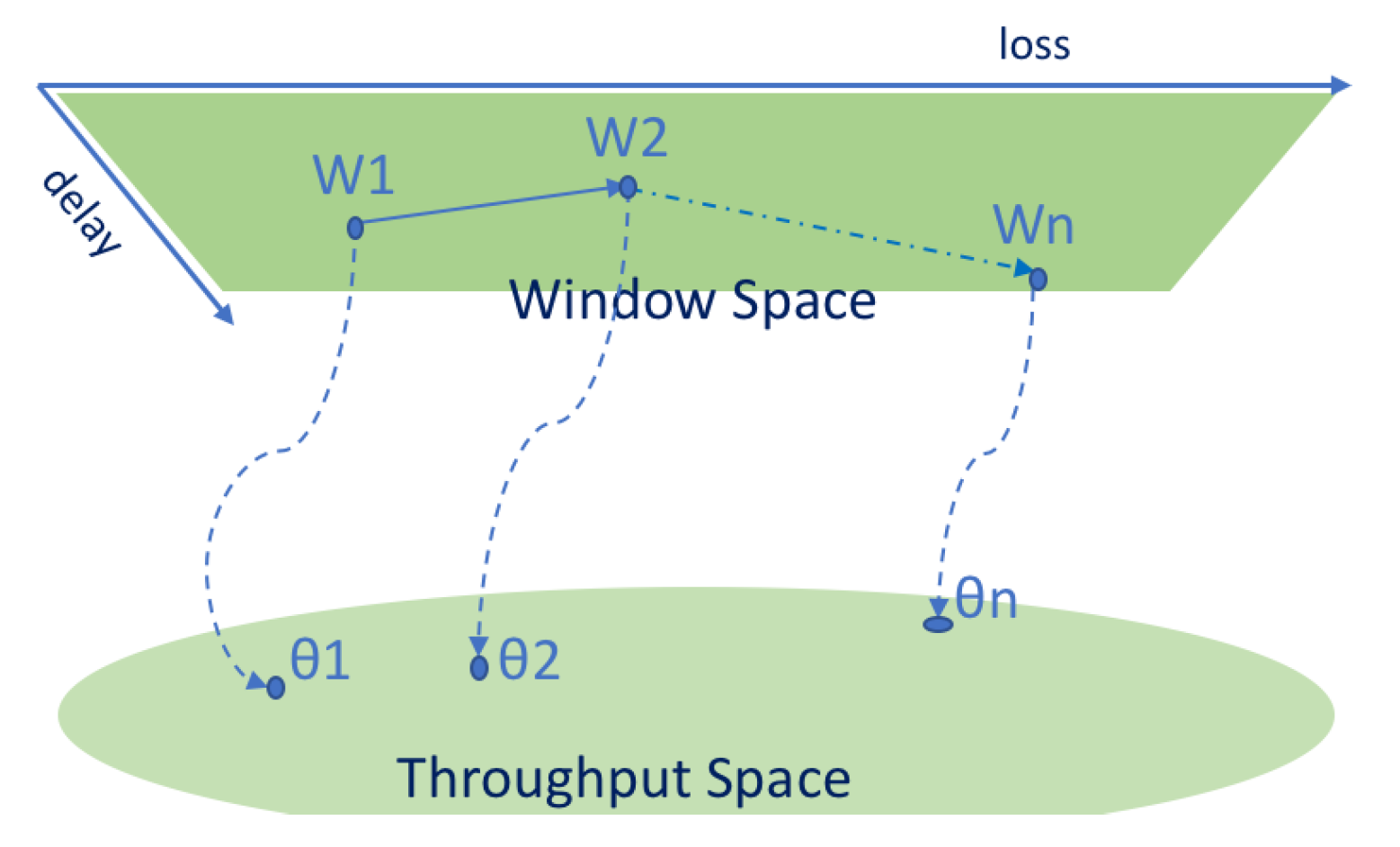
3. Modeling Framework
3.1. Rent-Seeking Game Framework
3.2. Equilibrium Properties
3.3. Diagonal Strict Concavity
3.3.1. Lyapunov Stability Theory
3.3.2. Utility Maximization Interpretation
3.3.3. Stability of the Dynamical System
4. Multiple MPTCP Connections
Learning for Continuous Actions
- Due to uncertainty in the channel dynamics, the arg max action choice can be too aggressive.
- Convergence of the dual-averaging (DA) approach is challenging, since the output will always be an extreme point.
| Algorithm 1 Abstract View of the Dual-Averaging Algorithm |
5. Evaluation
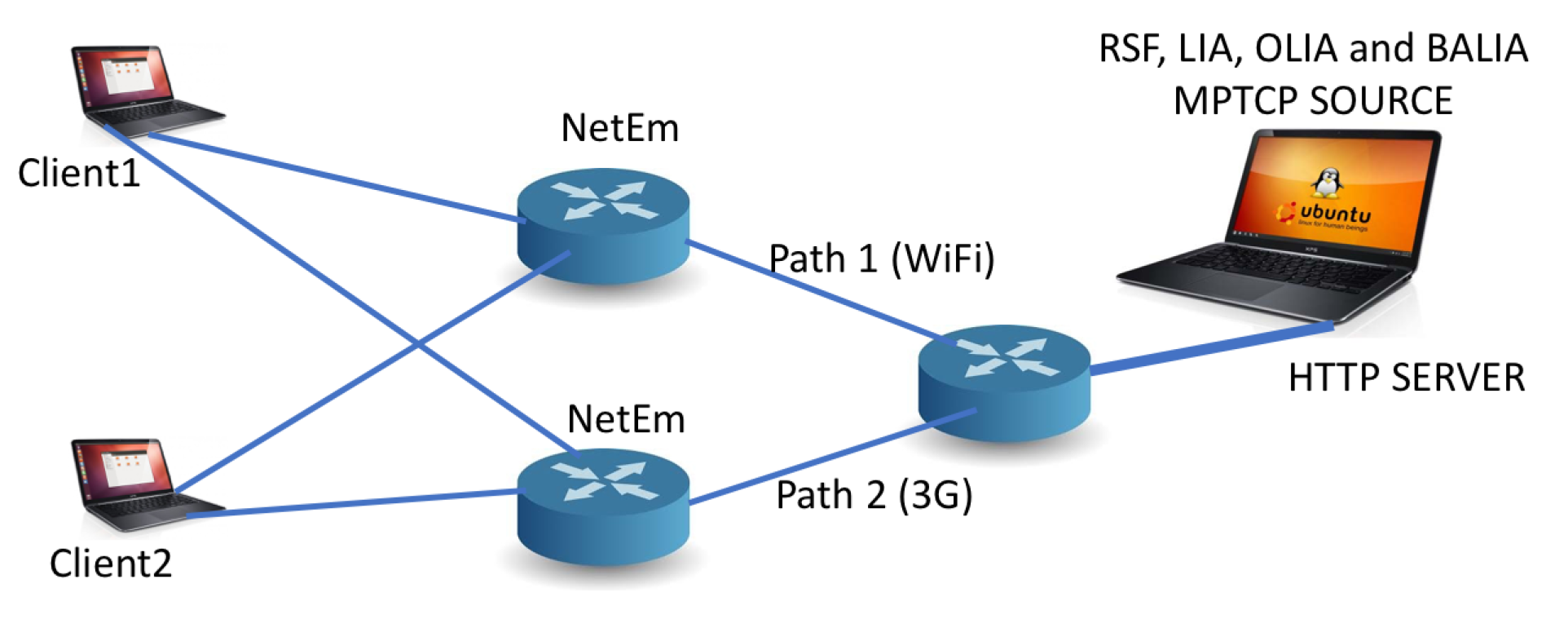
5.1. Experimental Setup
5.2. Baseline Results
5.2.1. Observation 0
5.2.2. Observation 1
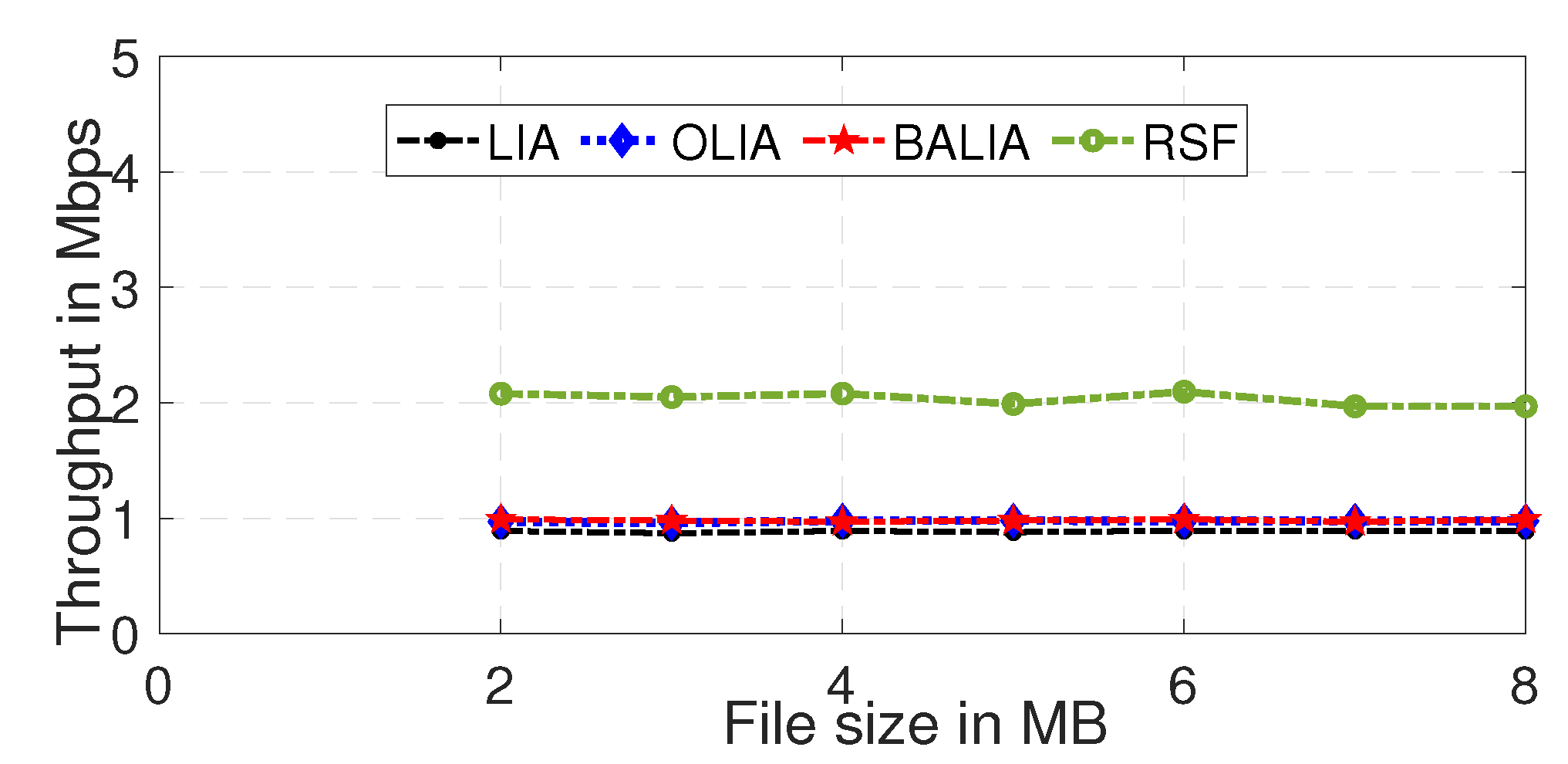
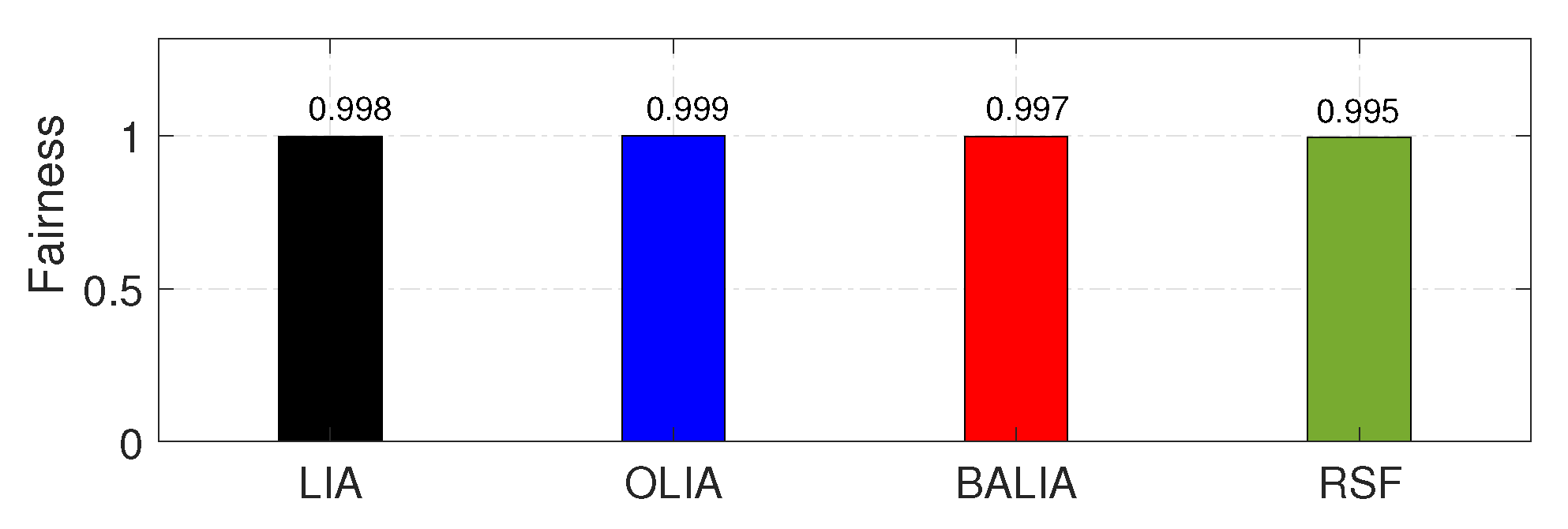
5.3. Homogeneous Paths
Observation 2/3
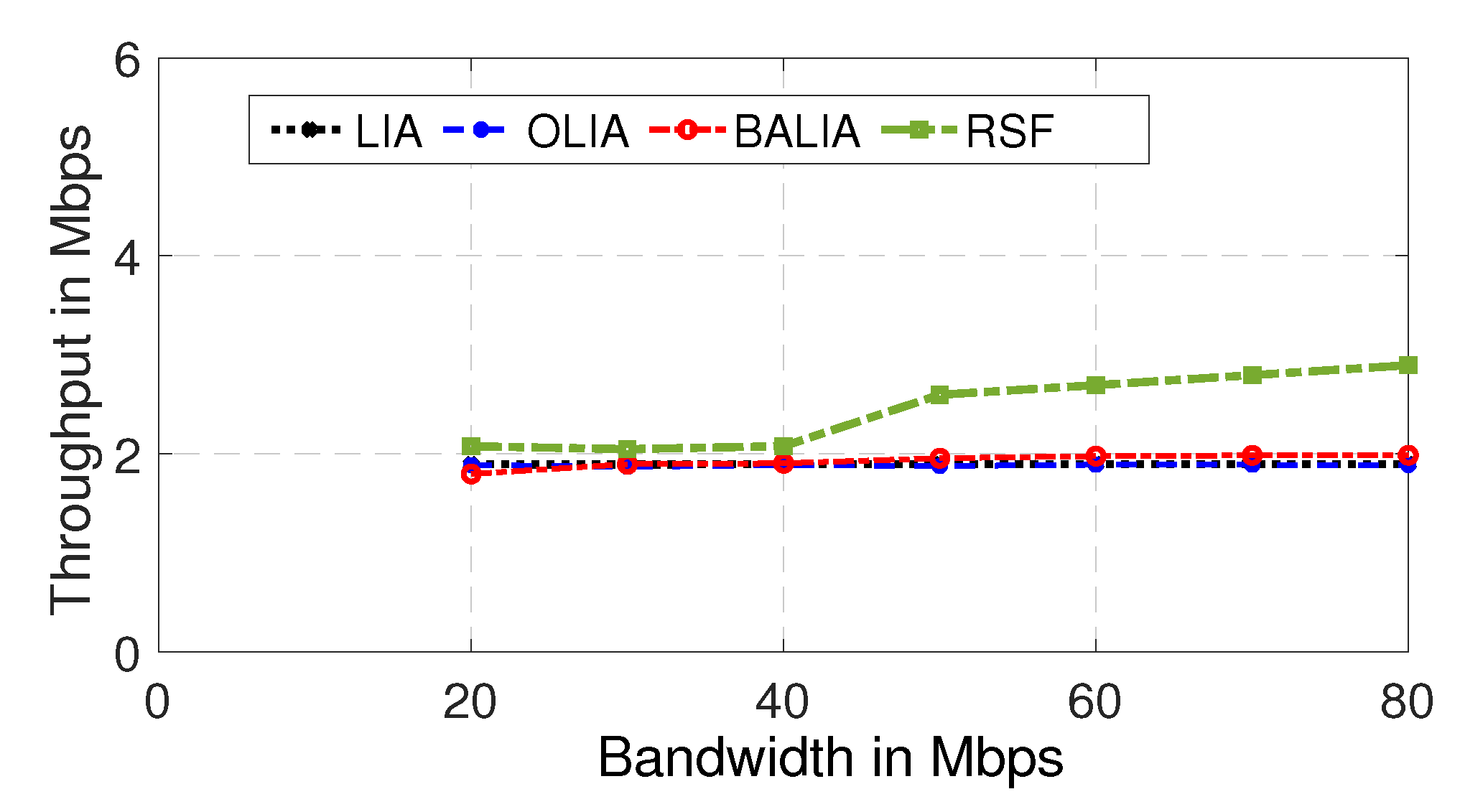
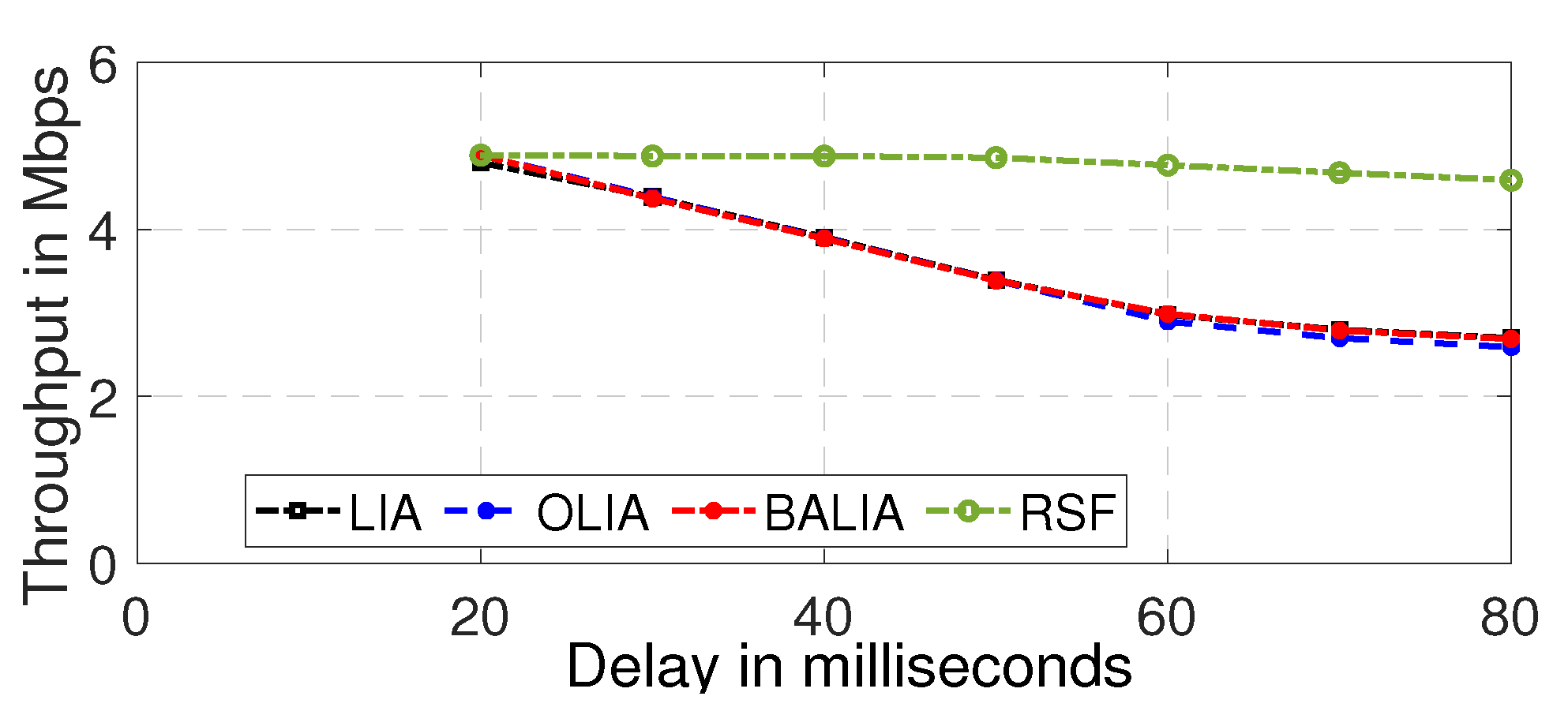
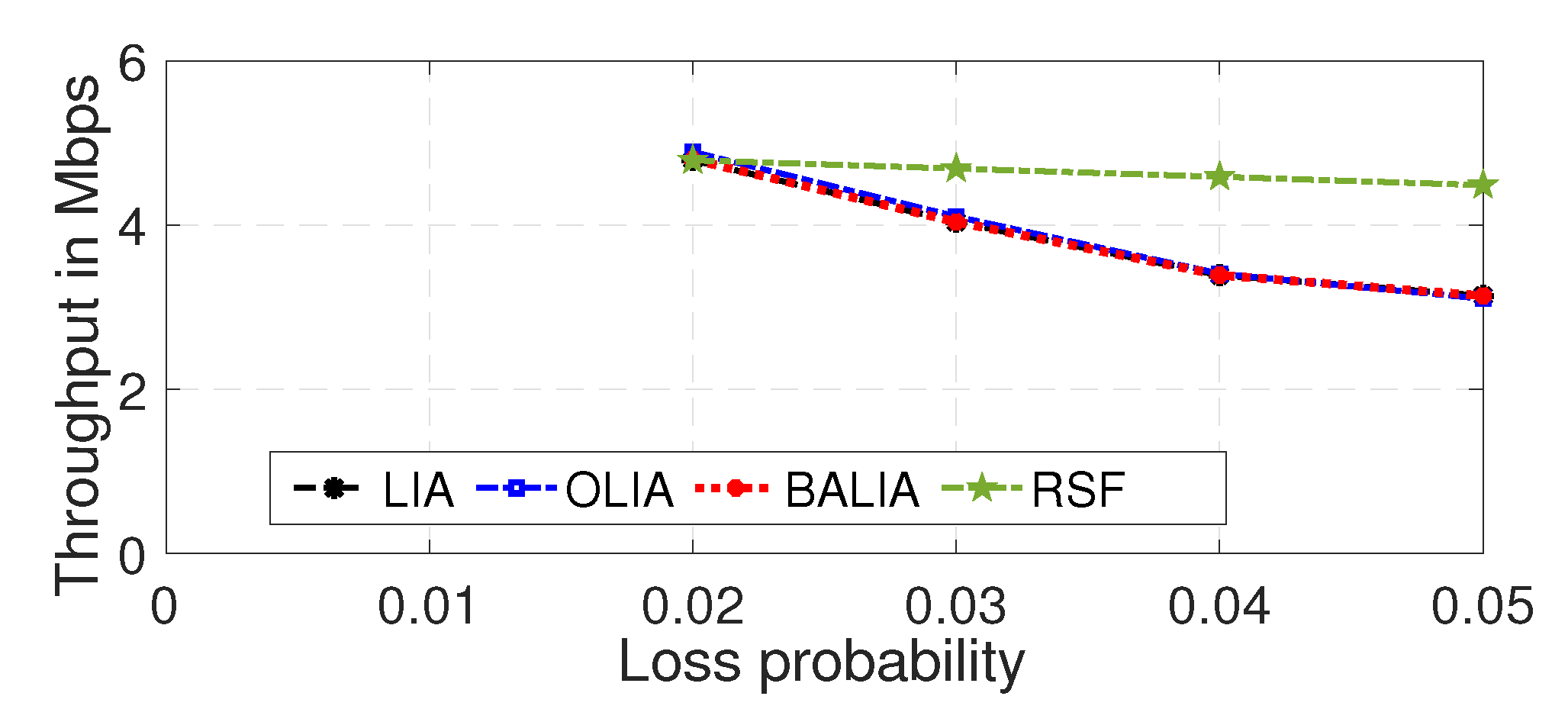
5.4. Heterogeneous Paths
5.4.1. Observation 4
5.4.2. Observation 5
5.4.3. Observation 6
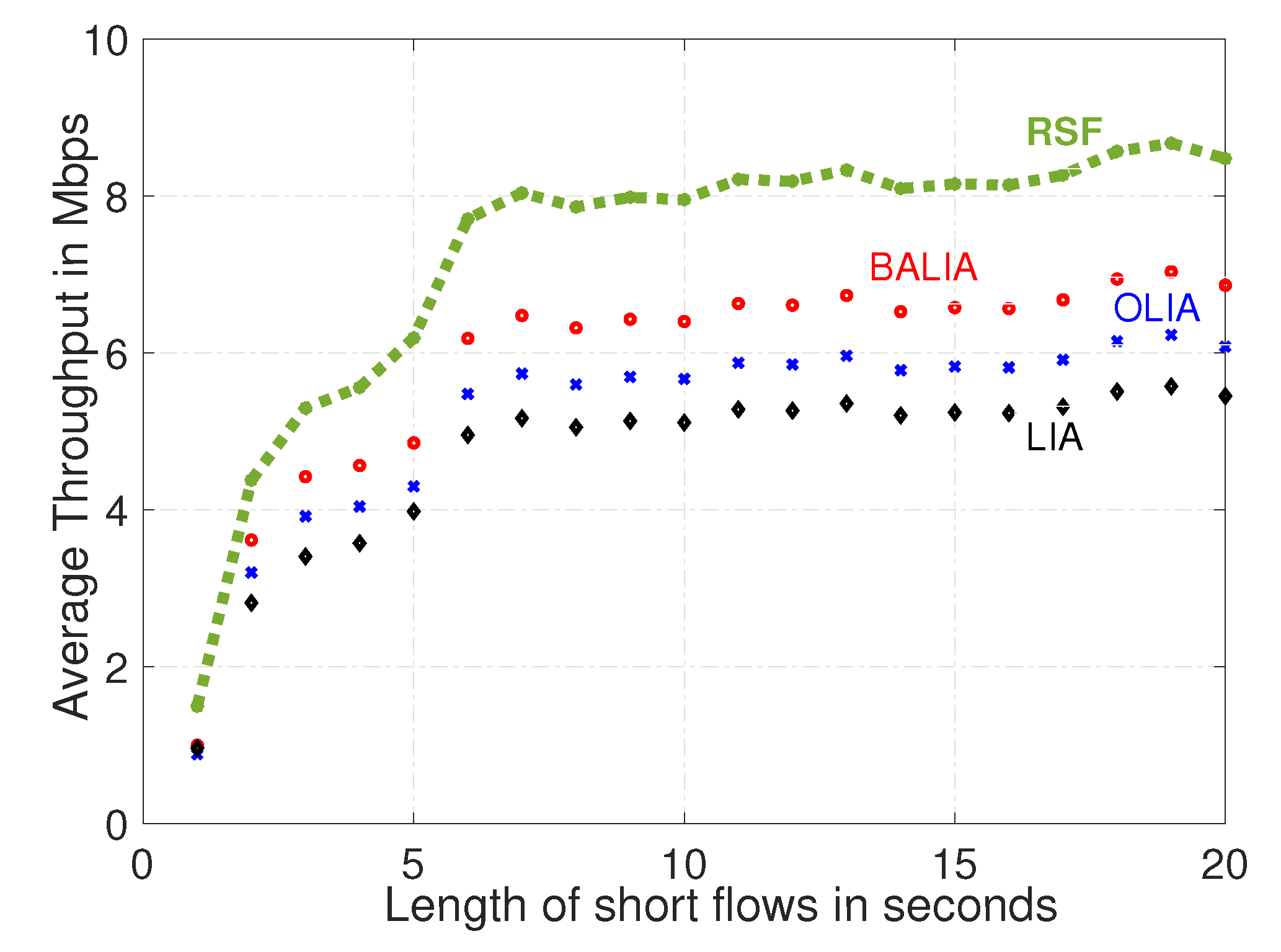
5.5. Additional Experiments
5.5.1. Observation 7
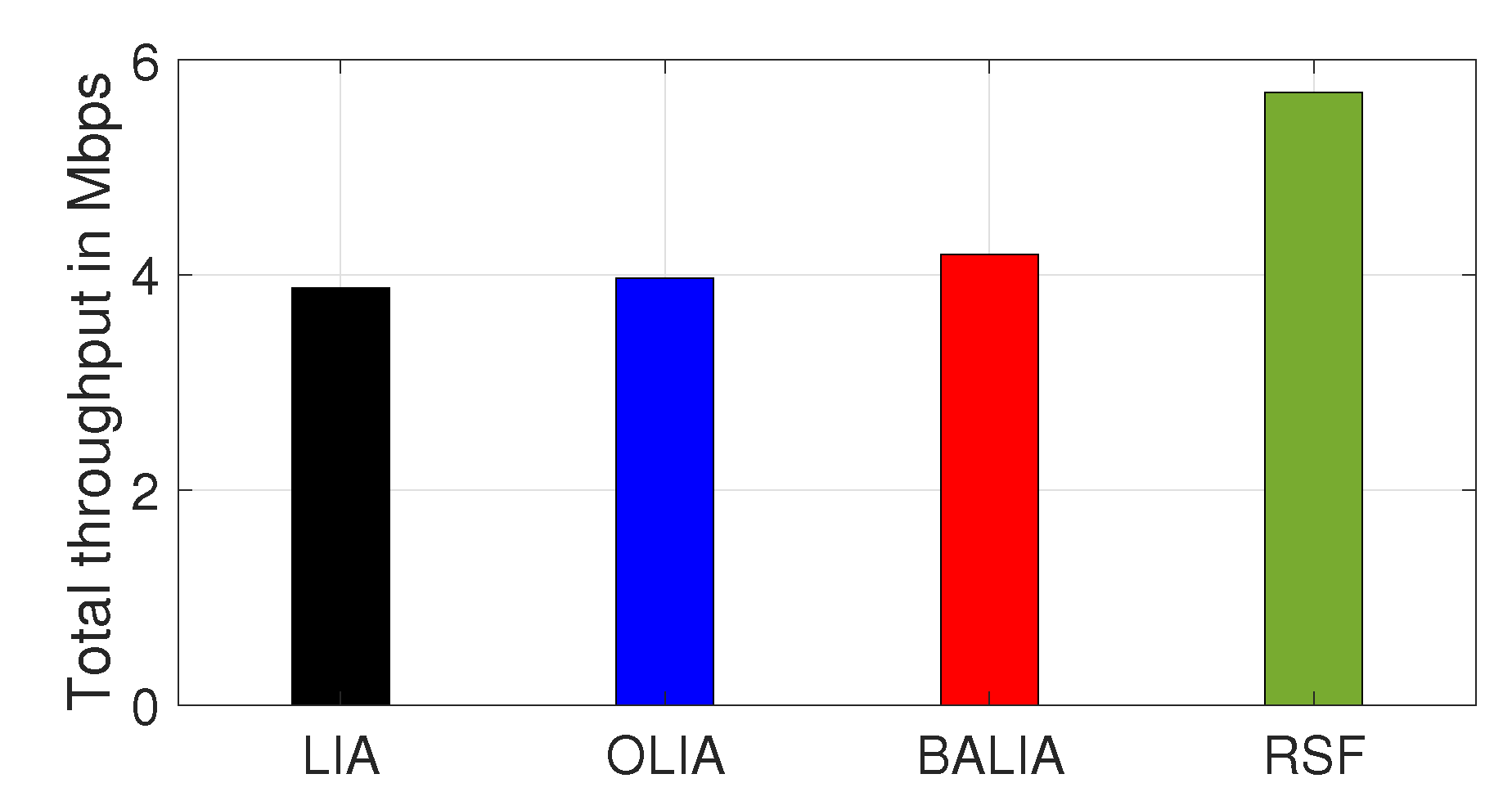
5.5.2. Observation 8
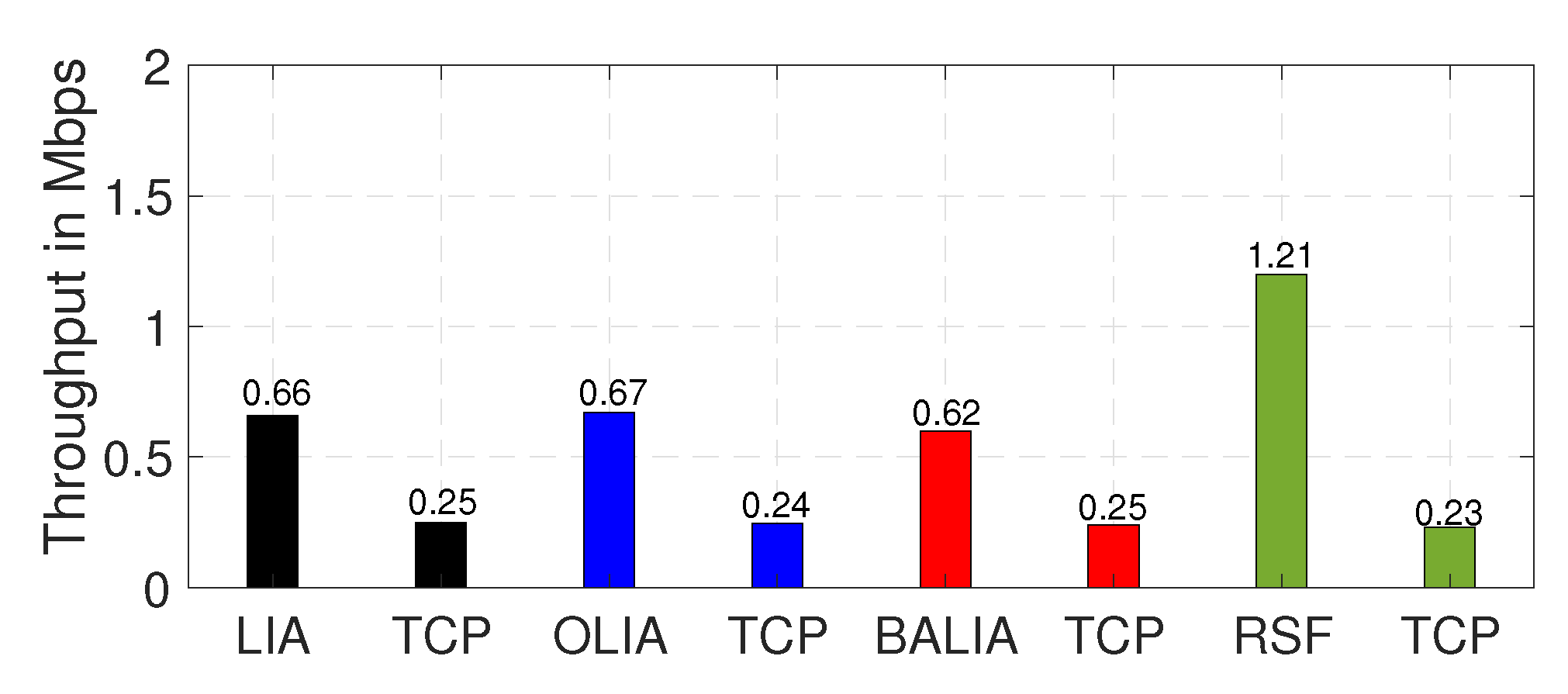
5.5.3. Observation 9
5.6. WiFi-Based Experiment
6. Potential Usage and Applications
6.1. Benefits to Service Providers, the Environment, and Society
6.2. Potential for Impact in 6G Specifications
6.3. Applicability of the Proposed RSF Framework
7. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Pokhrel, S.R.; Williamson, C. A Rent-Seeking Framework for Multipath TCP. ACM Sigmetrics Perform. Eval. Rev. 2021, 48, 63–70. [Google Scholar] [CrossRef]
- 3GPP TS23.700-93, V17.0.0; Study on Access Traffic Steering, Switch and Splitting Support in the 5G System Architecture Phase 2 (Release 17). Available online: https://portal.3gpp.org/desktopmodules/Specifications/SpecificationDetails.aspx?specificationId=3649 (accessed on 7 June 2022).
- 3GPP TS 23.501; System Architecture for the 5G System (V 16.4). Available online: https://portal.3gpp.org/desktopmodules/Specifications/SpecificationDetails.aspx?specificationId=3144 (accessed on 7 June 2022).
- Raiciu, C.; Handly, M.; Wischik, D. Coupled Congestion Control for Multipath Transport Protocols. IETF RFC 6356. October 2011. Available online: https://www.rfc-editor.org/rfc/rfc6356.html (accessed on 7 June 2022).
- Pokhrel, S.R.; Choi, J. Low-Delay Scheduling for Internet of Vehicles: Load-Balanced Multipath Communication with FEC. IEEE Trans. Commun. 2019, 67, 8489–8501. [Google Scholar] [CrossRef]
- Kelly, F.; Maulloo, A.; Tan, D. Rate Control for Communication Networks: Shadow Prices, Proportional Fairness and Stability. J. Oper. Res. Soc. 1998, 49, 237–252. [Google Scholar] [CrossRef]
- Kelly, F.P. Charging and rate control for elastic traffic. Eur. Trans. Telecommun. 1997, 8, 33–37. [Google Scholar] [CrossRef]
- Tullock, G. The Rent-Seeking Society; Liberty Fund: Indianapolis, IN, USA, 2005; Volume 5. [Google Scholar]
- Khalili, R.; Gast, N.; Popovic, M.; Le Boudec, J.-Y. MPTCP is Not Pareto-optimal: Performance Issues and a Possible Solution. IEEE/ACM Trans. Netw. 2013, 21, 1651–1665. [Google Scholar] [CrossRef]
- Pokhrel, S.; Mandjes, M. Improving Multipath TCP Performance over WiFi and Cellular Networks: An Analytical Approach. IEEE Trans. Mob. Comput. 2019, 18, 2562–2576. [Google Scholar] [CrossRef]
- Pokhrel, S.; Panda, M.; Vu, H. Fair Coexistence of Regular and Multipath TCP over Wireless Last-Miles. IEEE Trans. Mob. Comput. 2019, 18, 574–587. [Google Scholar] [CrossRef]
- Reiffers-Masson, A.; Hayel, Y.; Altman, E. Game Theory Approach for Modeling Competition over Visibility on Social Networks. In Proceedings of the 6th IEEE International Conference on Communication Systems and Networks (COMSNETS), Bangalore, India, 6–10 January 2014; pp. 1–6. [Google Scholar]
- Altman, E.; Datar, M.; Burnside, G.; Touati, C. Normalized Equilibrium in Tullock Rent Seeking Game. In Proceedings of the Game Theory for Networks, Paris, France, 25–26 April 2019; pp. 109–116. [Google Scholar]
- Altman, E.; Hanawal, M.; Sundaresan, R. Generalising Diagonal Strict Concavity Property for Uniqueness of Nash Equilibrium. Indian J. Pure Appl. Math. 2016, 47, 213–228. [Google Scholar] [CrossRef]
- Chen, Y.; Lim, Y.; Gibbens, R.; Nahum, E.; Khalili, R.; Towsley, D. A Measurement-based Study of Multipath TCP Performance over Wireless Networks. In Proceedings of the ACM Internet Measurement Conference (IMC), Barcelona, Spain, 25–27 October 2013; pp. 455–468. [Google Scholar]
- Hajek, B.; Gopalakrishnan, G. Do greedy autonomous systems make for a sensible Internet. In Proceedings of the Conference on Stochastic Networks, Stanford, CA, USA, 24–29 June 2002; Volume 222. [Google Scholar]
- Johariand, R.; Tsitsiklis, J.N. Efficiency loss in a network resource allocation game. Math. Oper. Res. 2004, 29, 407–435. [Google Scholar]
- Rosen, J. Existence and Uniqueness of Equilibrium Points for Concave N-Person Games. Econometrica 1965, 33, 520–534. [Google Scholar] [CrossRef]
- Stoenescu, T.M.; Teneketzis, D. Decentralized resource allocation mechanisms in networks: Realization and implementation. In Advances in Control, Communication Networks, and Transportation Systems; Springer: Berlin/Heidelberg, Germany; Birkhäuser: Boston, MA, USA, 2005; pp. 225–263. [Google Scholar]
- Vardoyan, G.; Hollot, C.; Towsley, D. Towards Stability Analysis of Data Transport Mechanisms: A Fluid Model and Its Applications. IEEE/ACM Trans. Netw. 2021, 29, 1730–1744. [Google Scholar] [CrossRef]
- Ye, J.; Leung, K.; Low, S. Combating Bufferbloat in Multi-Bottleneck Networks: Theory and Algorithms. IEEE/ACM Trans. Netw. 2021, 29, 1477–1493. [Google Scholar] [CrossRef]
- Key, P.; Massoulié, L.; Towsley, D. Path Selection and Multipath Congestion Control. Commun. ACM 2011, 54, 109–116. [Google Scholar] [CrossRef]
- Peng, Q.; Walid, A.; Hwang, J.; Low, S. Multipath TCP: Analysis, Design, and Implementation. IEEE/ACM Trans. Netw. 2016, 24, 596–609. [Google Scholar] [CrossRef]
- Peng, Q.; Walid, A.; Low, S. Multipath TCP: Theory and Design. In Proceedings of the ACM SIGMETRICS, Pittsburgh, PA, USA, 18–20 June 2013; pp. 305–316. [Google Scholar]
- Tullock, G.; Brady, G.; Seldon, A. Government Failure: A Primer in Public Choice; Cato Institute: Washington, DC, USA, May 2002. [Google Scholar]
- Williamson, C. Dynamic Bandwidth Allocation Using Loss-Load Curves. IEEE/ACM Trans. Netw. 1996, 4, 829–839. [Google Scholar] [CrossRef]
- McKelvey, R.; Thomas, R. Quantal Response Equilibria for Normal Form Games. Games Econ. Behav. 1995, 10, 6–38. [Google Scholar] [CrossRef]
- Nesterov, Y. Primal-Dual Subgradient Methods for Convex Problems. Math. Program. 2009, 120, 221–259. [Google Scholar] [CrossRef]
- Padhye, J.; Firoiu, V.; Towsley, D.; Kurose, J. Modeling TCP Throughput: A Simple Model and its Empirical Validation. In Proceedings of the ACM SIGCOMM’98 Conference on Applications, Technologies, Architectures, and Protocols for Computer Communication, Vancouver, BC, Canada, 31 August–4 September 1998; pp. 303–314. [Google Scholar]
- Mertikopoulos, P.; Zhou, Z. Learning in Games with Continuous Action Sets and Unknown Payoff Functions. Math. Program. 2019, 173, 465–507. [Google Scholar] [CrossRef]
- Mertikopoulos, P.; William, S. Learning in Games via Reinforcement and Regularization. Math. Oper. Res. 2016, 41, 1297–1324. [Google Scholar] [CrossRef]
- Shalev-Shwartz, S. Online Learning and Online Convex Optimization. Found. Trends Mach. Learn. 2011, 4, 107–194. [Google Scholar] [CrossRef]
- Pokhrel, S.; Pan, L.; Kumar, N.; Doss, R.; Vu, H. Multipath TCP Meets Transfer Learning: A Novel Edge-based Learning For Industrial IoT. IEEE Internet Things J. 2021, 8, 10299–10307. [Google Scholar] [CrossRef]
- Pokhrel, S.R.; Walid, A. Learning to harness bandwidth with multipath congestion control and scheduling. IEEE Trans. Mob. Comput. 2021. [Google Scholar] [CrossRef]
- Pokhrel, S.R. Learning from data streams for automation and orchestration of 6G industrial IoT: Toward a semantic communication framework. Neural Comput. Appl. 2022, 34, 15197–15206. [Google Scholar] [CrossRef]
- Pokhrel, S.R.; Hossain, M.B. Data Privacy of Wireless Charging Vehicle to Grid (V2G) Networks with Federated Learning. IEEE Trans. Veh. Technol. 2022, 71, 9032–9037. [Google Scholar] [CrossRef]
- Luo, T.; Kanhere, S.S.; Tan, H.-P.; Wu, F.; Wu, H. Crowdsourcing with tullock contests: A new perspective. In Proceedings of the IEEE Conference on Computer Communications (INFOCOM), Hong Kong, China, 26 April–1 May 2015; pp. 2515–2523. [Google Scholar]
- Altman, E.; Menasché, D.; Reiffers-Masson, A.; Datar, M.; Dhamal, S.; Touati, C.; El-Azouzi, R. Blockchain competition between miners: A game theoretic perspective. Front. Blockchain 2020, 26. [Google Scholar] [CrossRef] [Green Version]
- Datar, M.; Altman, E. Strategic Resource Management in 5G Network Slicing. In Proceedings of the IEEE International Teletraffic Congress (ITC-33), Avignon, France, 31 August–3 September 2021; pp. 1–9. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| MPTCP Algorithms | Increase on Path i | Decrease on Path i |
|---|---|---|
| LIA [4] | For each acknowledgment, | For each packet loss, |
| as regular TCP | ||
| OLIA [9] | For each acknowledgment, | For each packet loss, |
| as regular TCP | ||
| BALIA [23] | For each acknowledgment, | For each packet loss, |
| ID | Emulated Network Scenario | Regular TCP | MPTCP Algorithm (Mbps) | |||
|---|---|---|---|---|---|---|
| LIA | OLIA | BALIA | RSF | |||
| 0 | Single Path | 1.58 | 1.53 | 1.57 | 1.58 | 1.58 |
| 1 | Homogeneous Paths: No Loss | 1.58 | 2.52 | 2.58 | 2.54 | 2.53 |
| 2 | Homogeneous Paths: 2% Loss | - | 0.88 | 0.98 | 0.98 | 1.98 |
| 3 | Homogeneous Paths: 10% Loss | - | 0.31 | 0.35 | 0.39 | 0.62 |
| 4 | Heterogeneous Paths: Bandwidth | - | 1.88 | 1.88 | 1.98 | 2.89 |
| 5 | Heterogeneous Paths: Delay | - | 2.59 | 2.69 | 2.69 | 4.59 |
| 6 | Heterogeneous Paths: Loss | - | 3.13 | 3.10 | 3.12 | 4.48 |
| 7 | Short-Lived Flows | 3.42 | 5.51 | 6.21 | 7.02 | 8.67 |
| 8 | Path Failure | 2.21 | 3.88 | 3.97 | 4.19 | 5.71 |
| 9 | Competing TCP Flows | 0.25 | 0.66 | 0.67 | 0.61 | 1.20 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pokhrel, S.R.; Williamson, C. A Game-Theoretic Rent-Seeking Framework for Improving Multipath TCP Performance. Future Internet 2022, 14, 257. https://doi.org/10.3390/fi14090257
Pokhrel SR, Williamson C. A Game-Theoretic Rent-Seeking Framework for Improving Multipath TCP Performance. Future Internet. 2022; 14(9):257. https://doi.org/10.3390/fi14090257
Chicago/Turabian StylePokhrel, Shiva Raj, and Carey Williamson. 2022. "A Game-Theoretic Rent-Seeking Framework for Improving Multipath TCP Performance" Future Internet 14, no. 9: 257. https://doi.org/10.3390/fi14090257