
A Needle-Free Jet Injection System for Controlled Release and Repeated Biopharmaceutical Delivery



Abstract
:1. Introduction
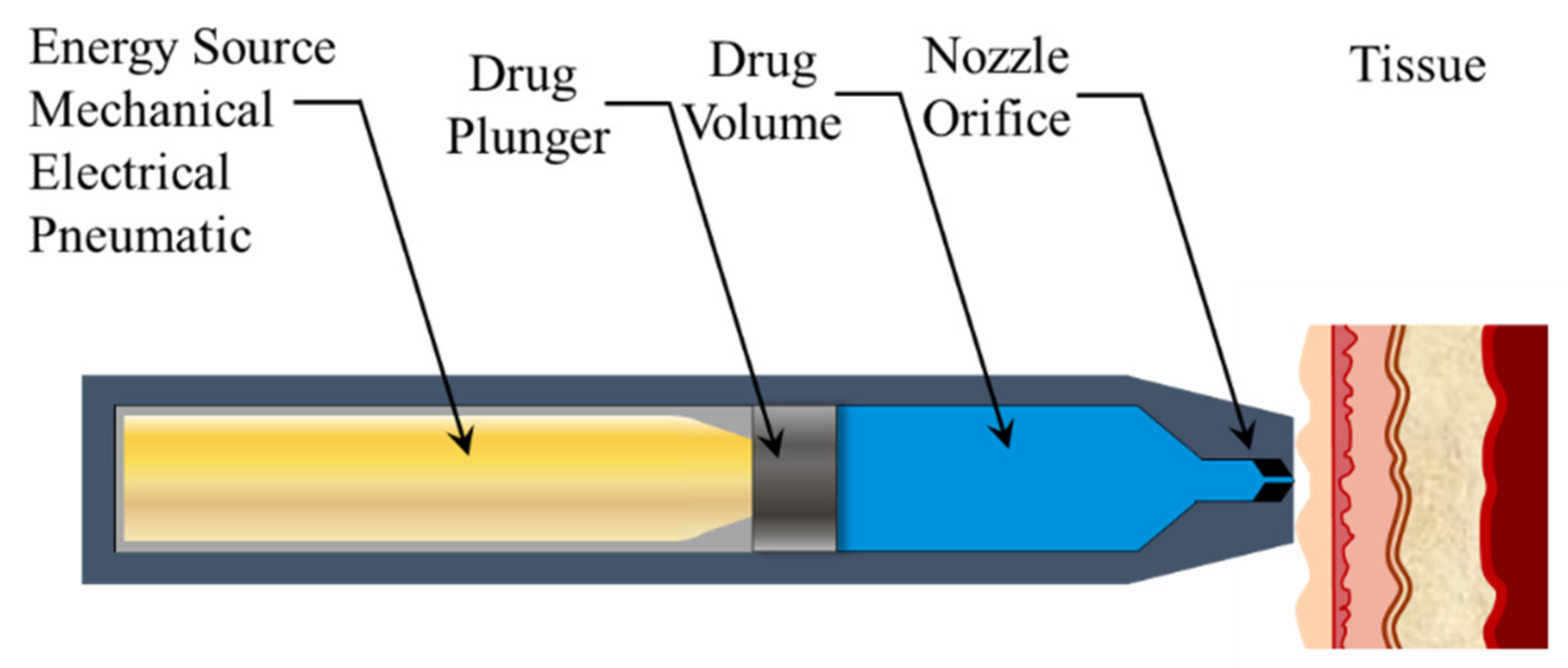
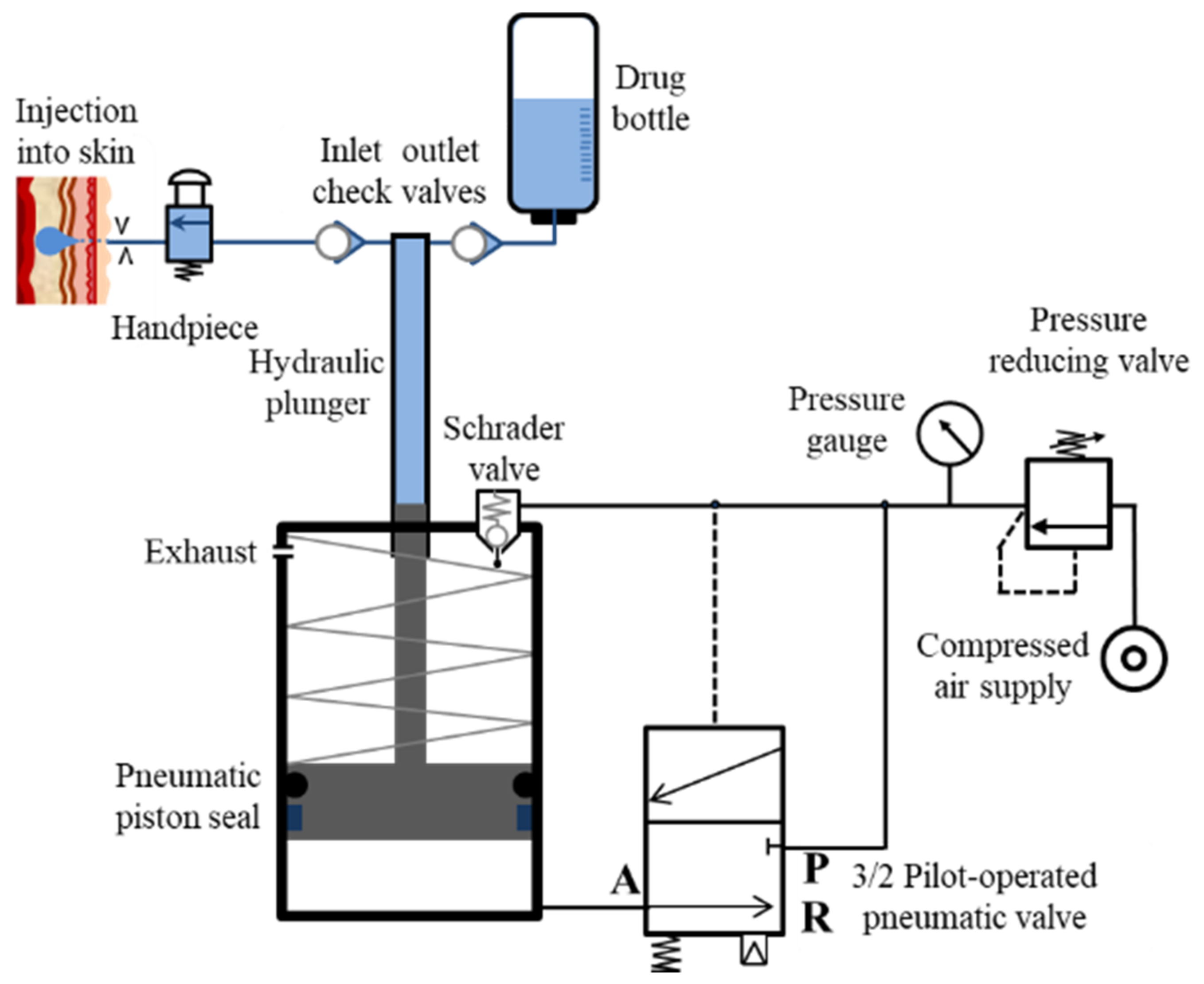
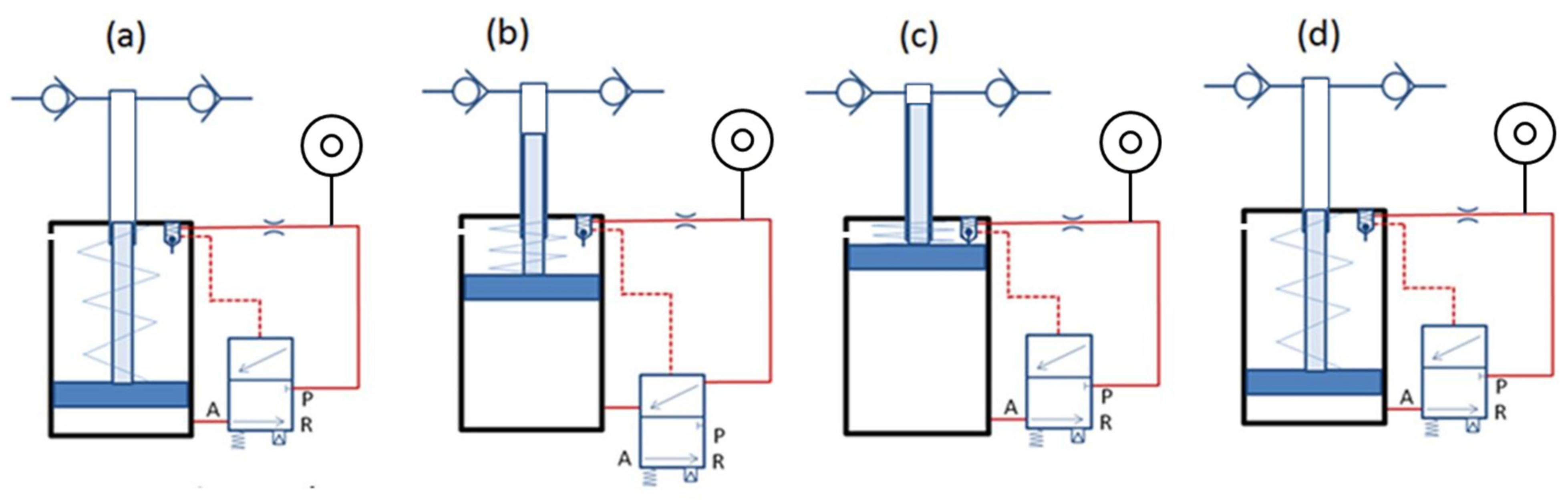
2. Mechanism of NFJIS
3. Materials and Methods for the Development of NFJIS
3.1. Axiomatic Design and Mathematical Modeling
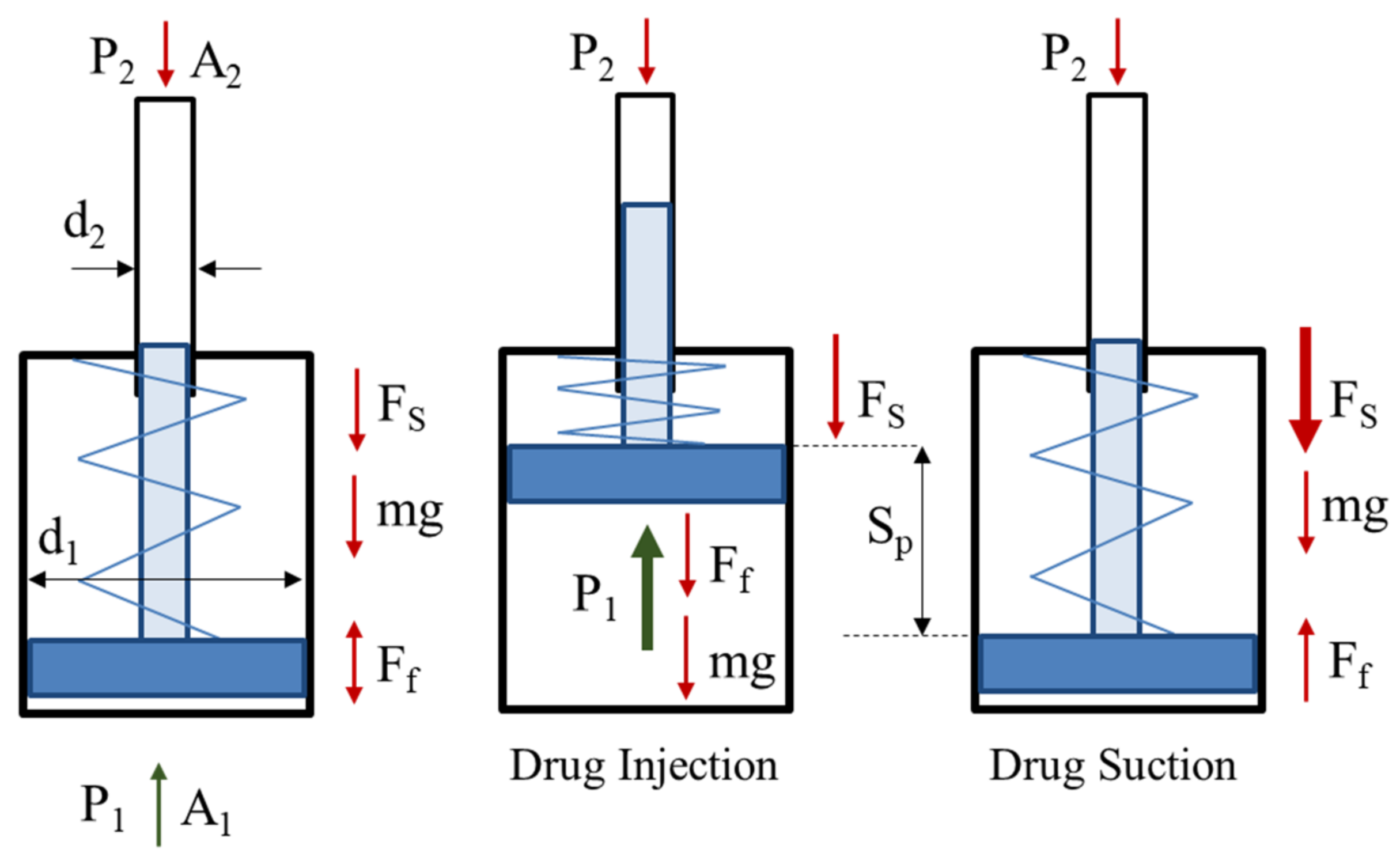
3.1.1. Force Balance for Pressure Intensification
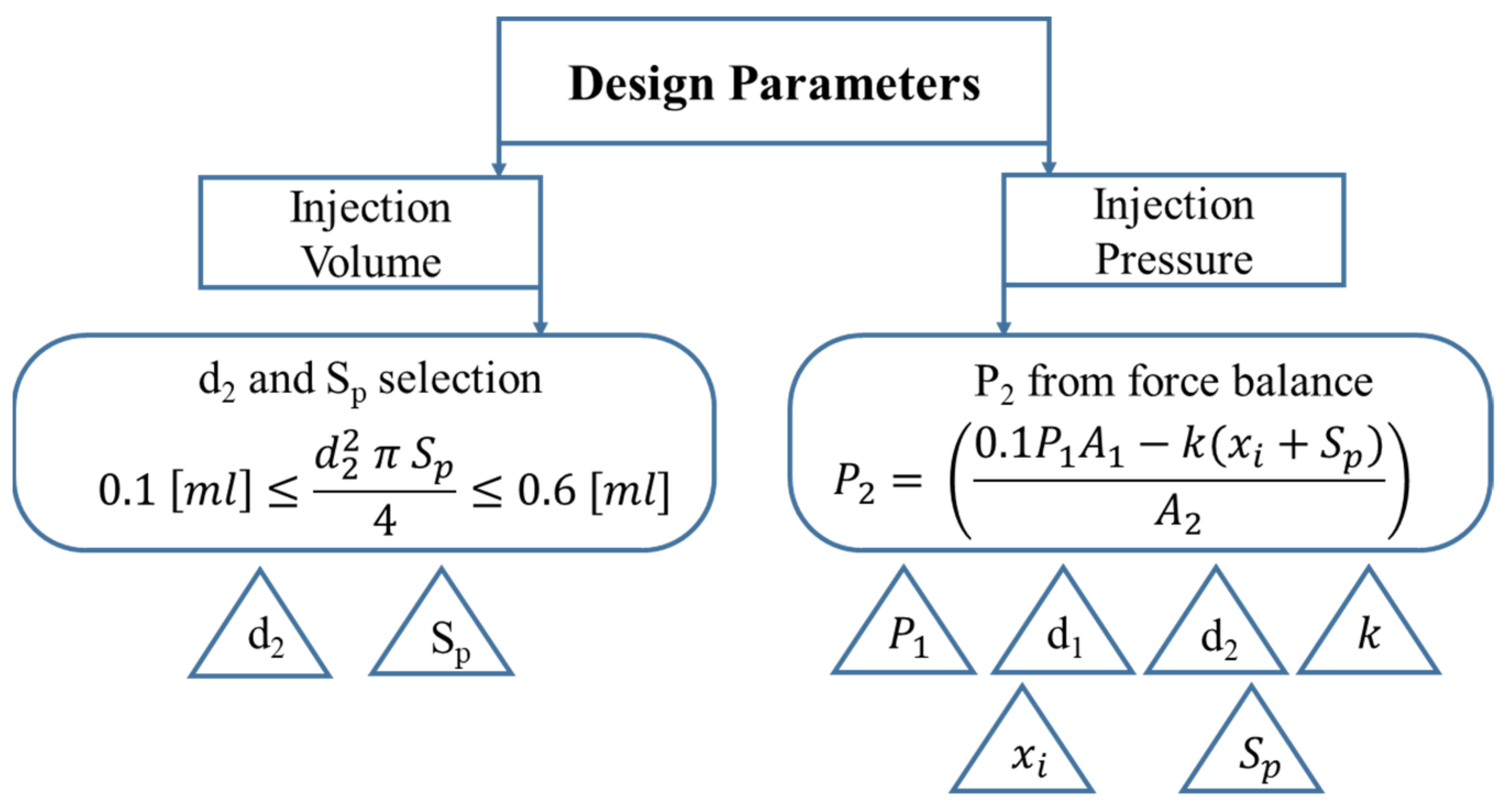
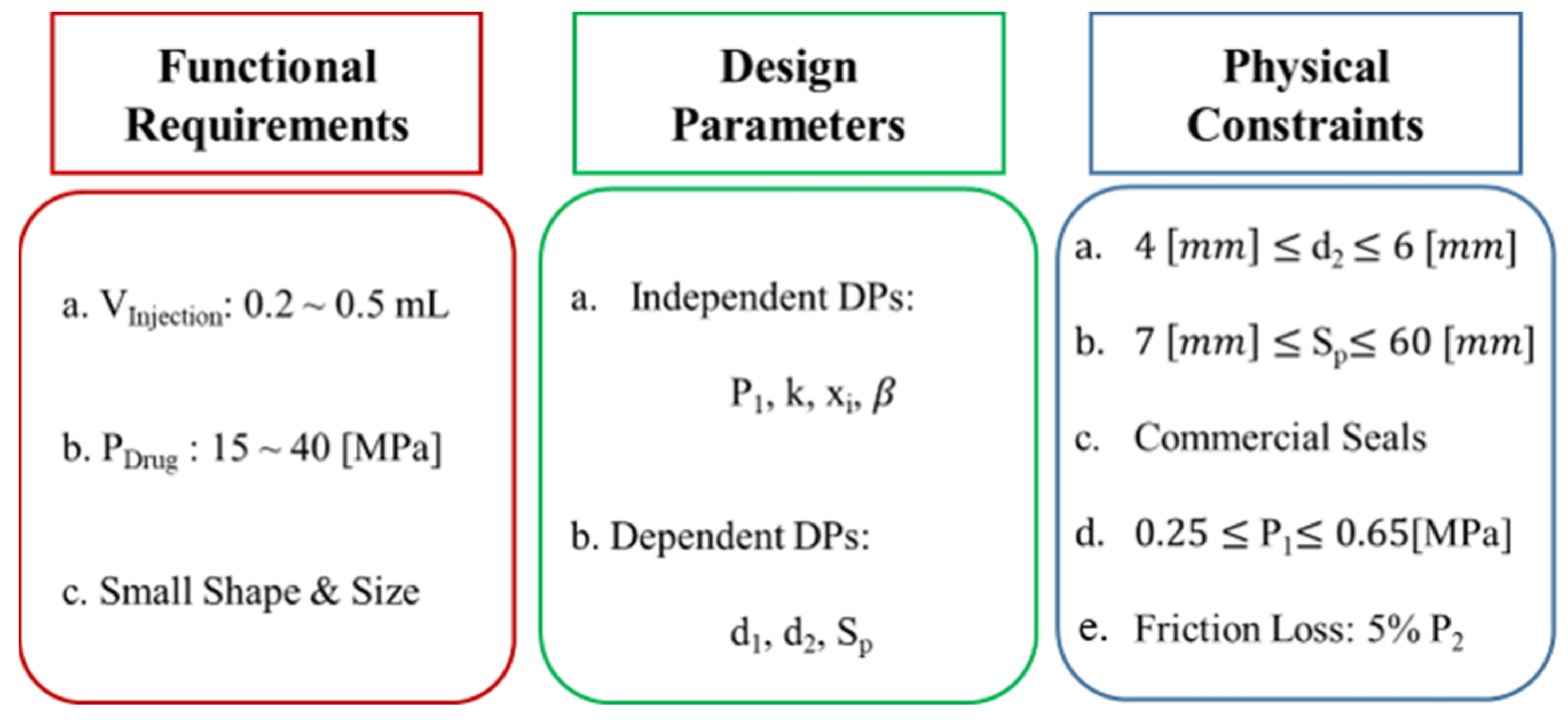
3.1.2. Design Parameters
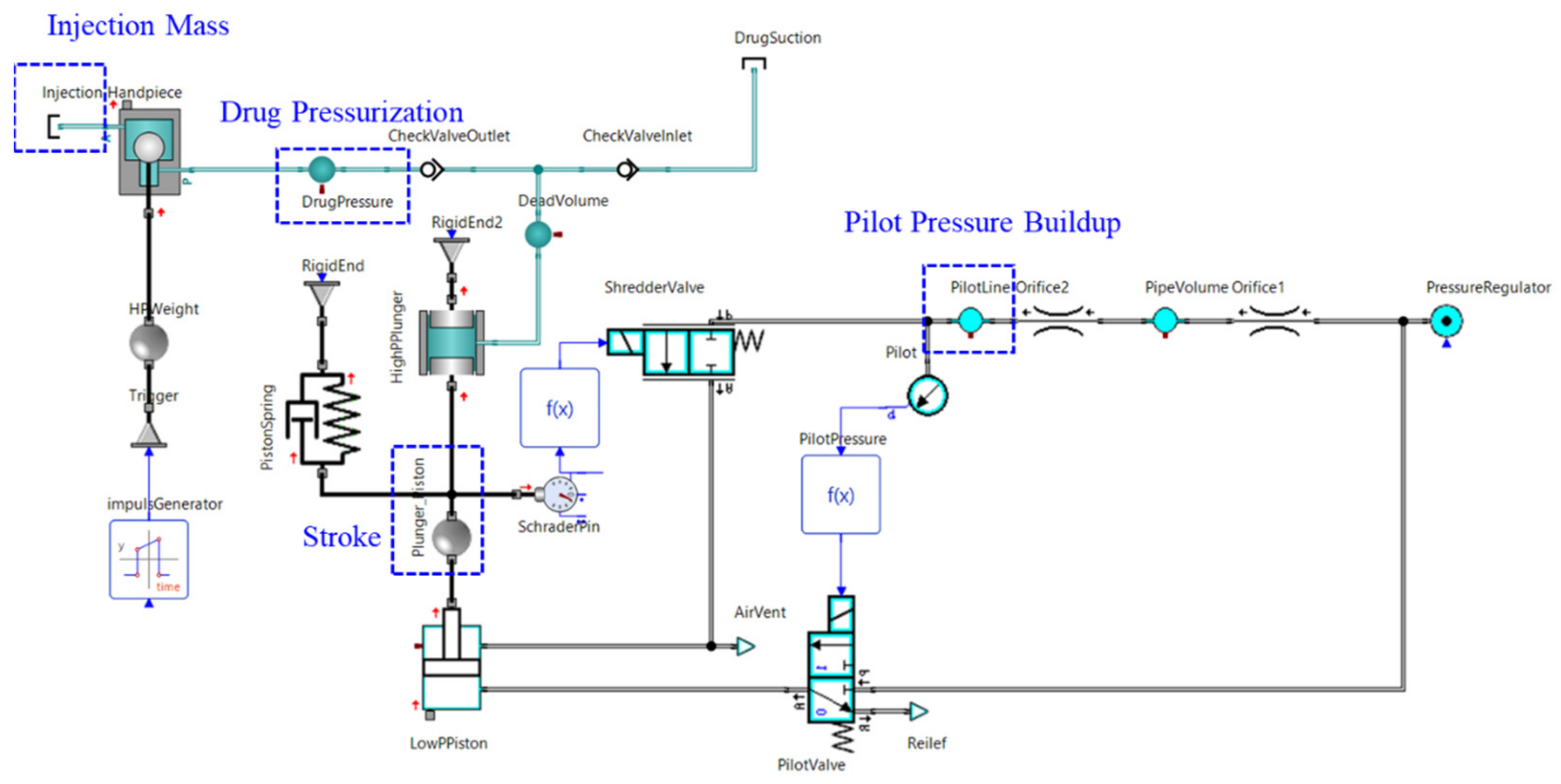
3.2. Simulation Model
3.2.1. Pilot-Operated Pneumatic Valve
3.2.2. Pneumatic Piston
3.2.3. T-Chamber
3.2.4. Hydraulic Plunger
3.2.5. Handpiece
3.2.6. Simulation Model
3.3. Vaccine and Working Fluid Properties
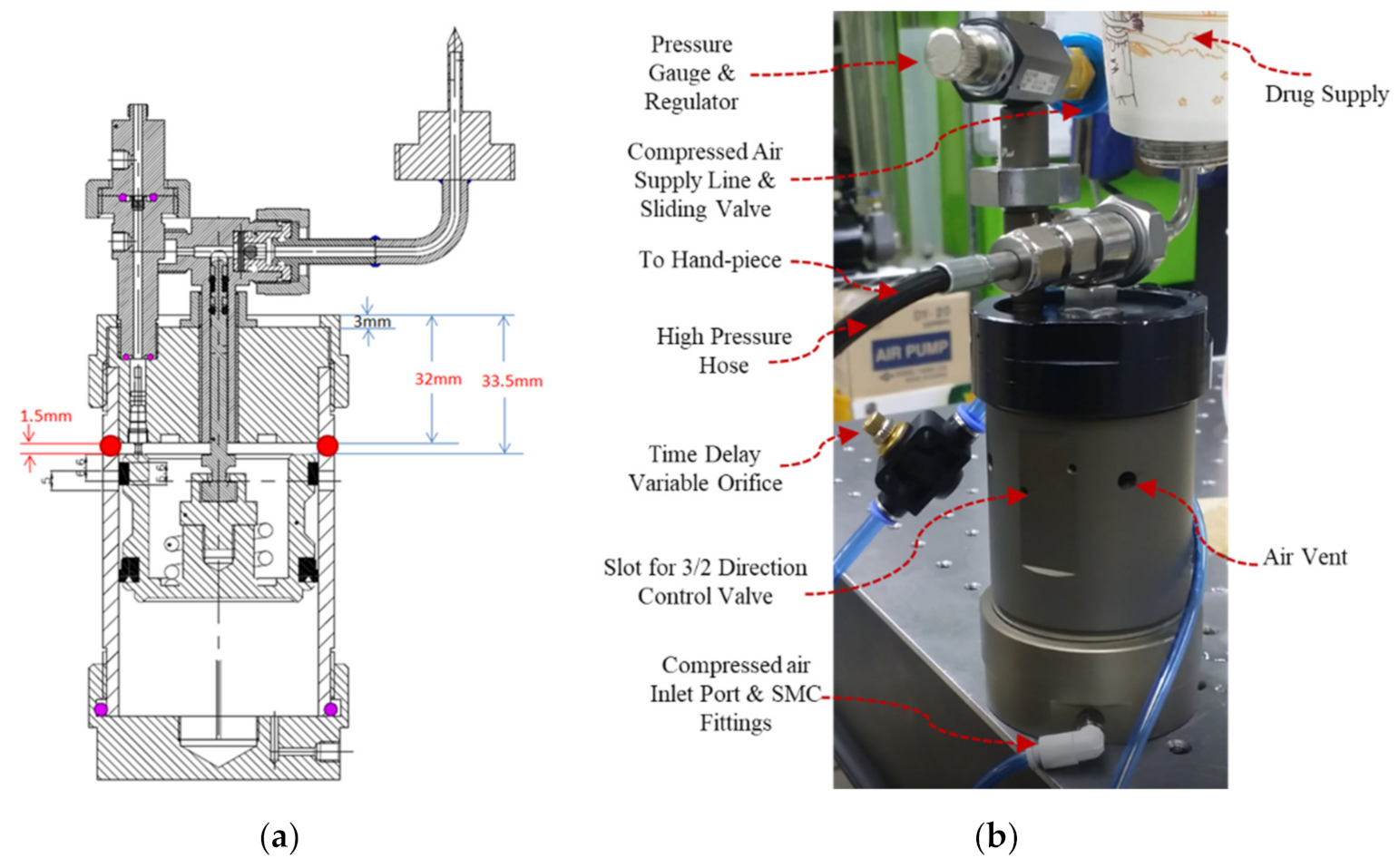
4. Experimental Evaluation of NFJIS
4.1. NFJIS Troubleshooting for Normal Operation
4.2. Injection Pressure and Volume Measurement
4.3. Ex Vivo Injection Penetration Experiments
5. Results and Discussion
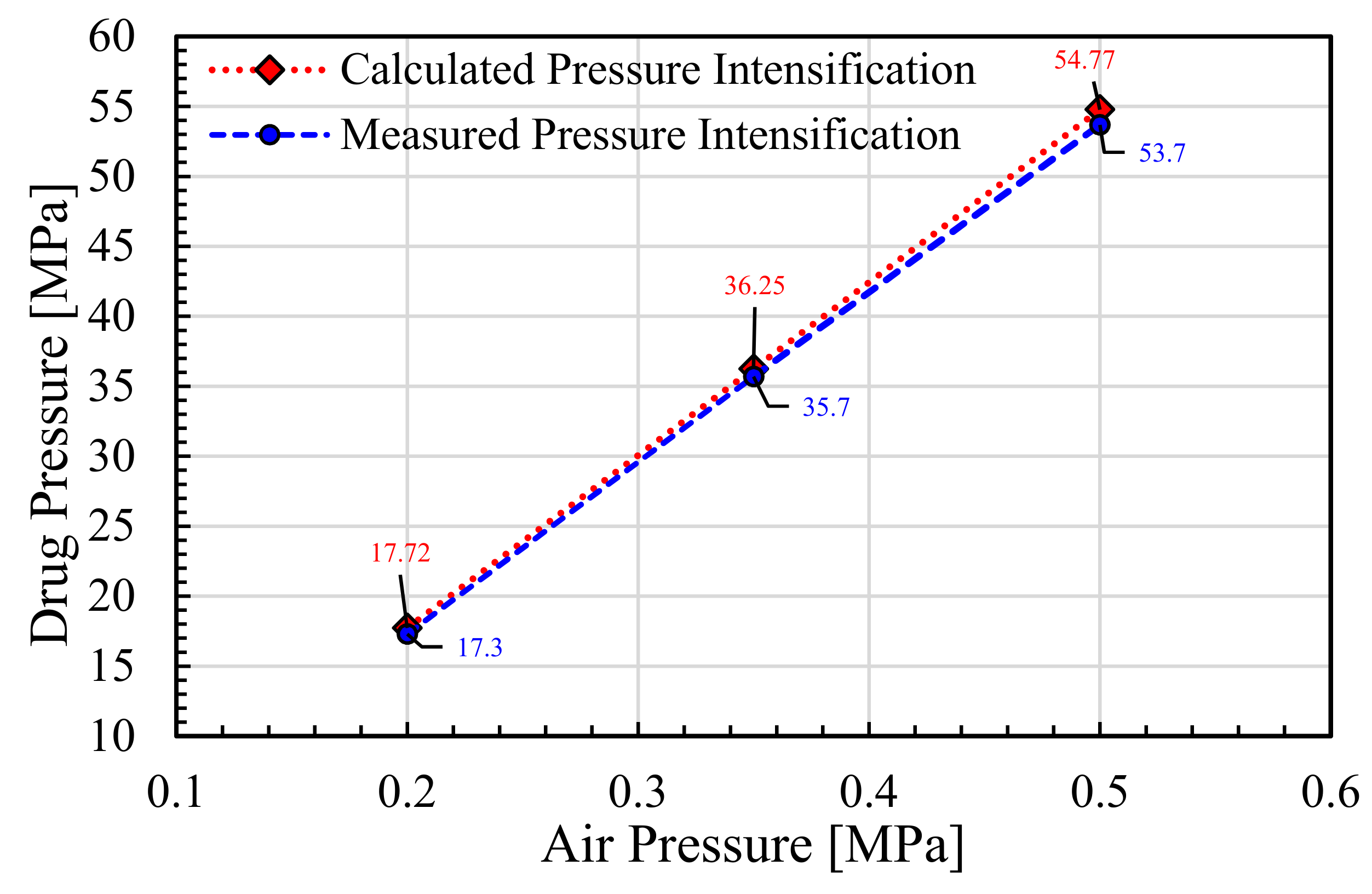
5.1. Pressure Intensification
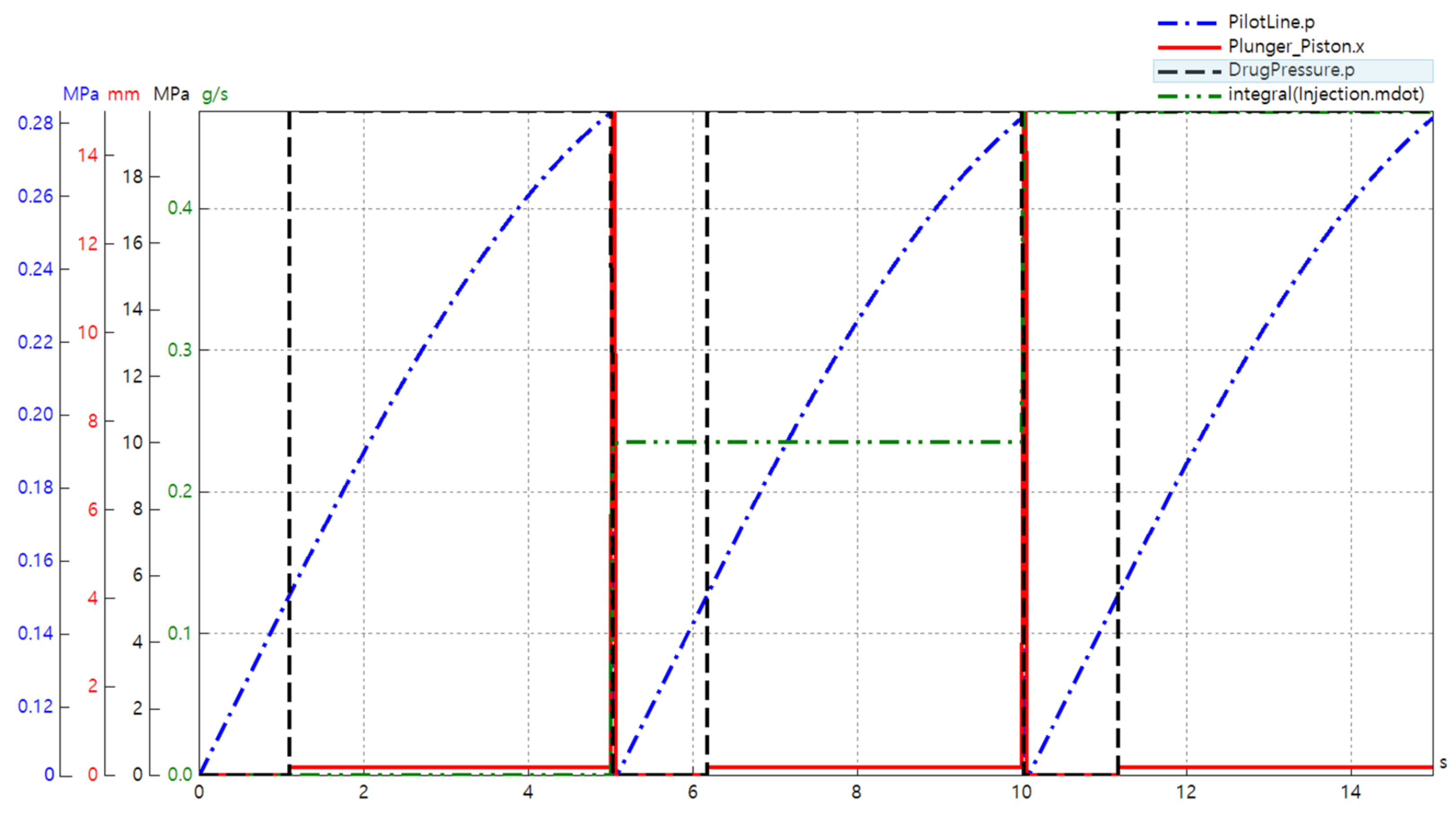
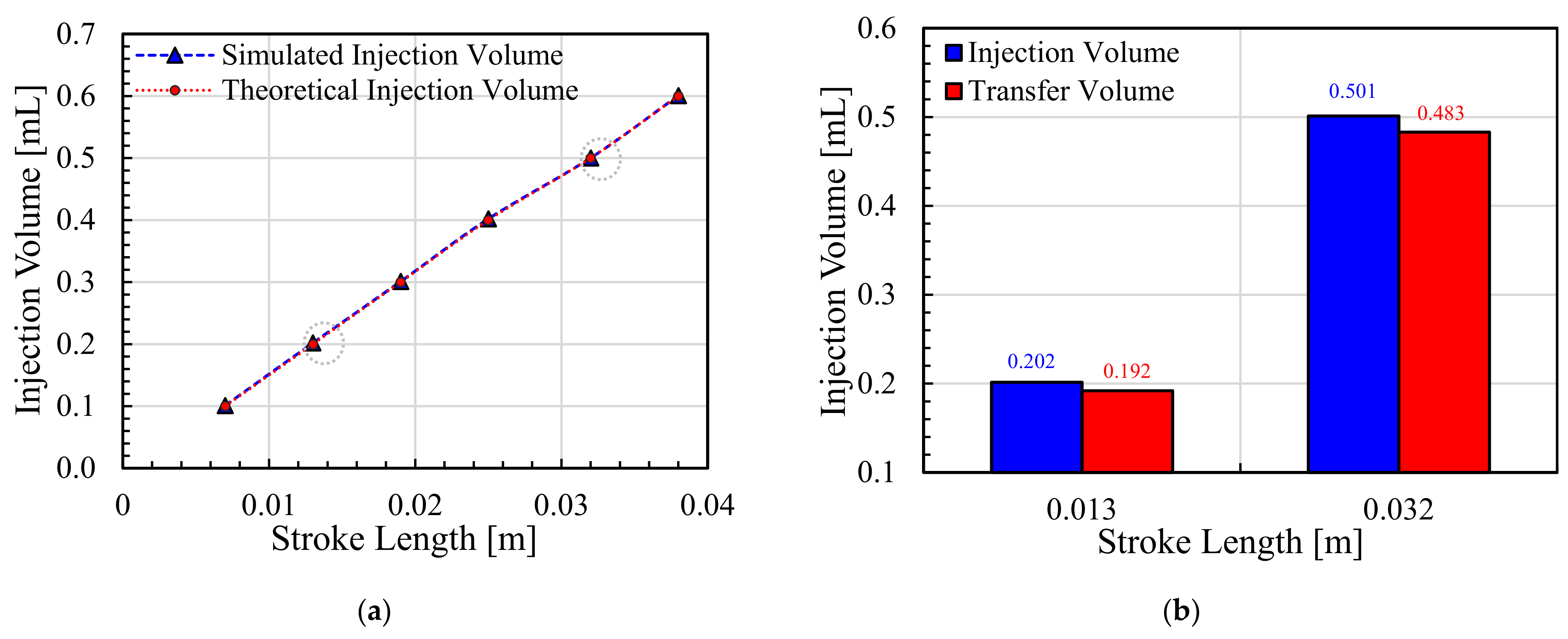
5.2. Simulated Model
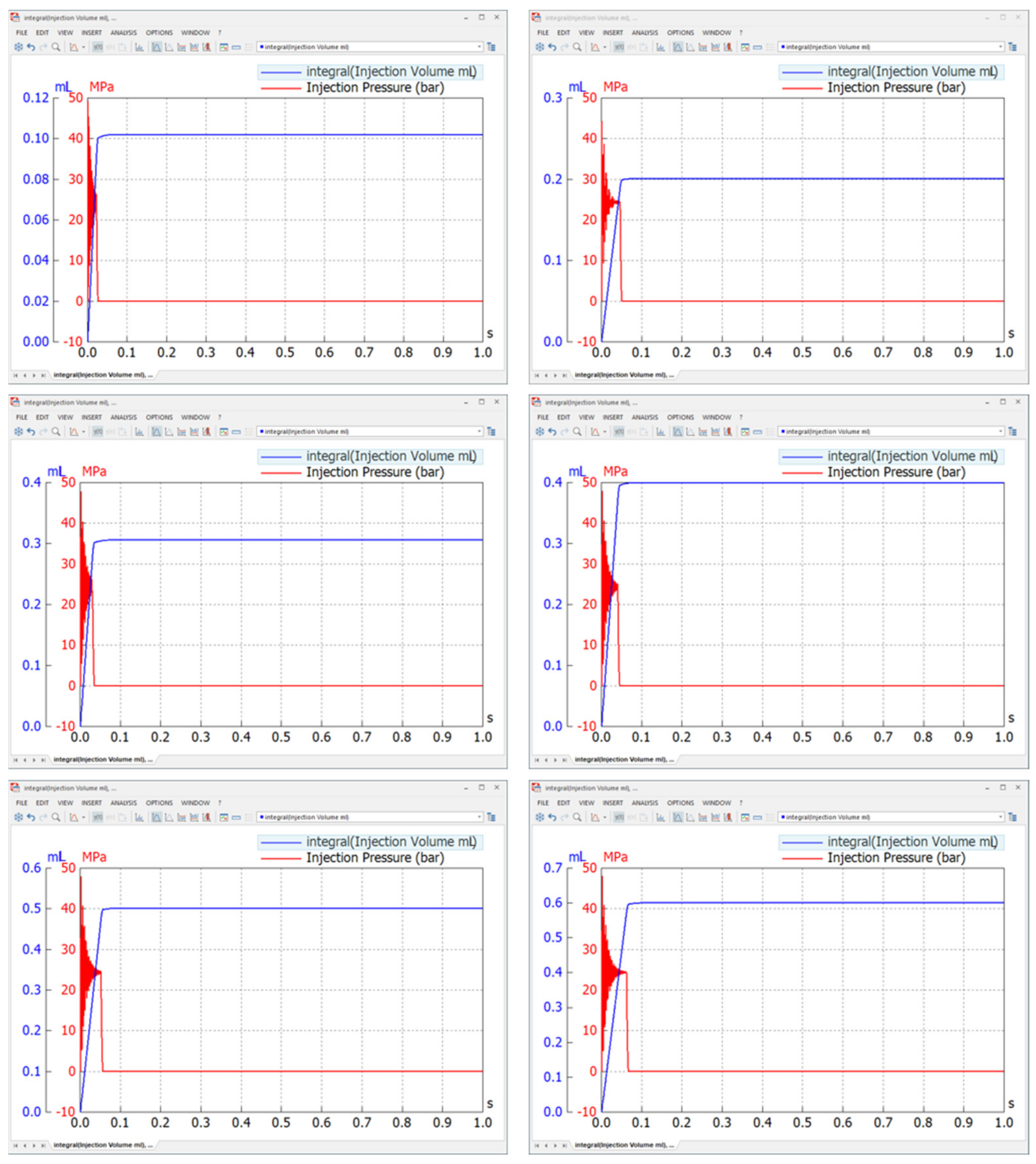
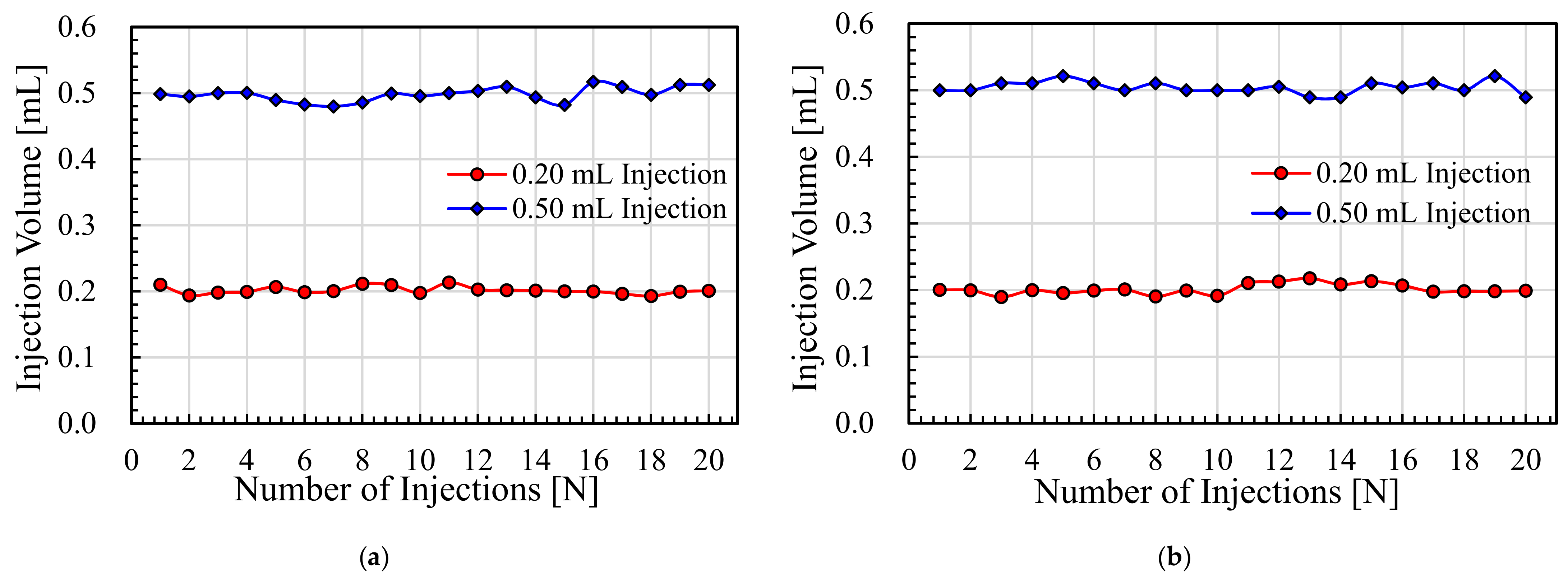
5.3. Injection Volume Variation
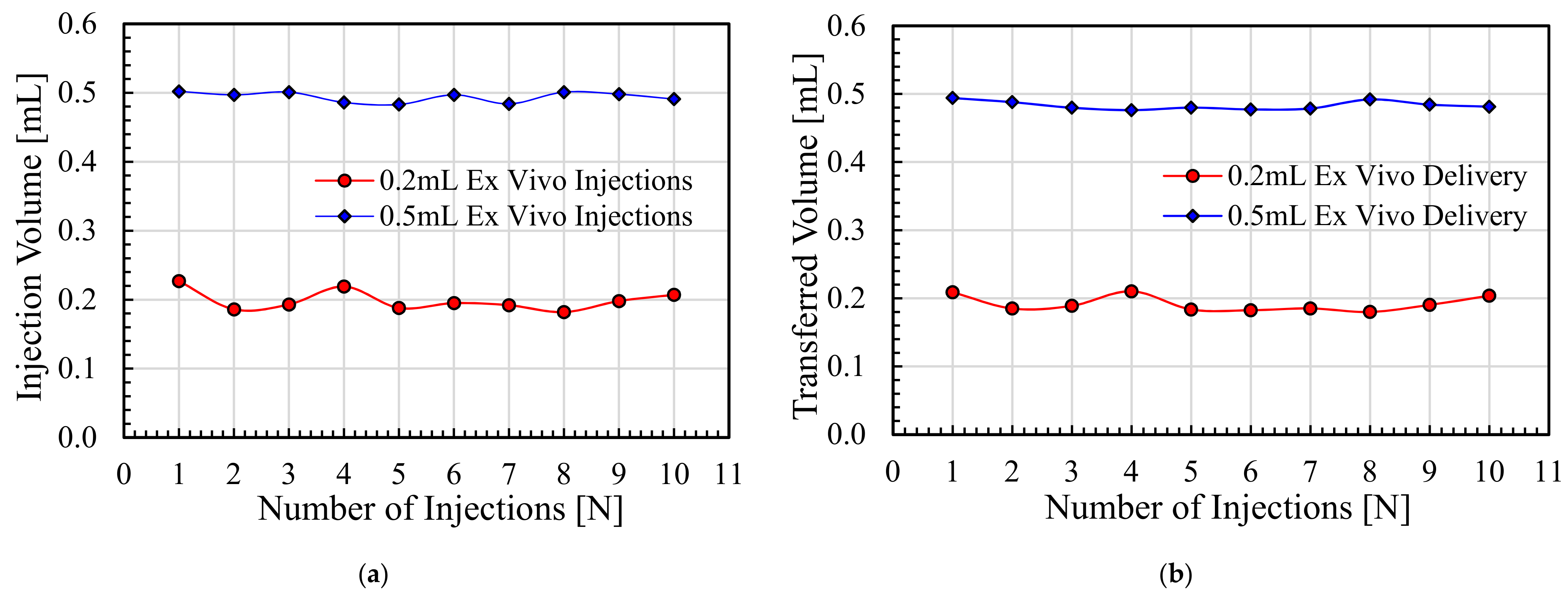
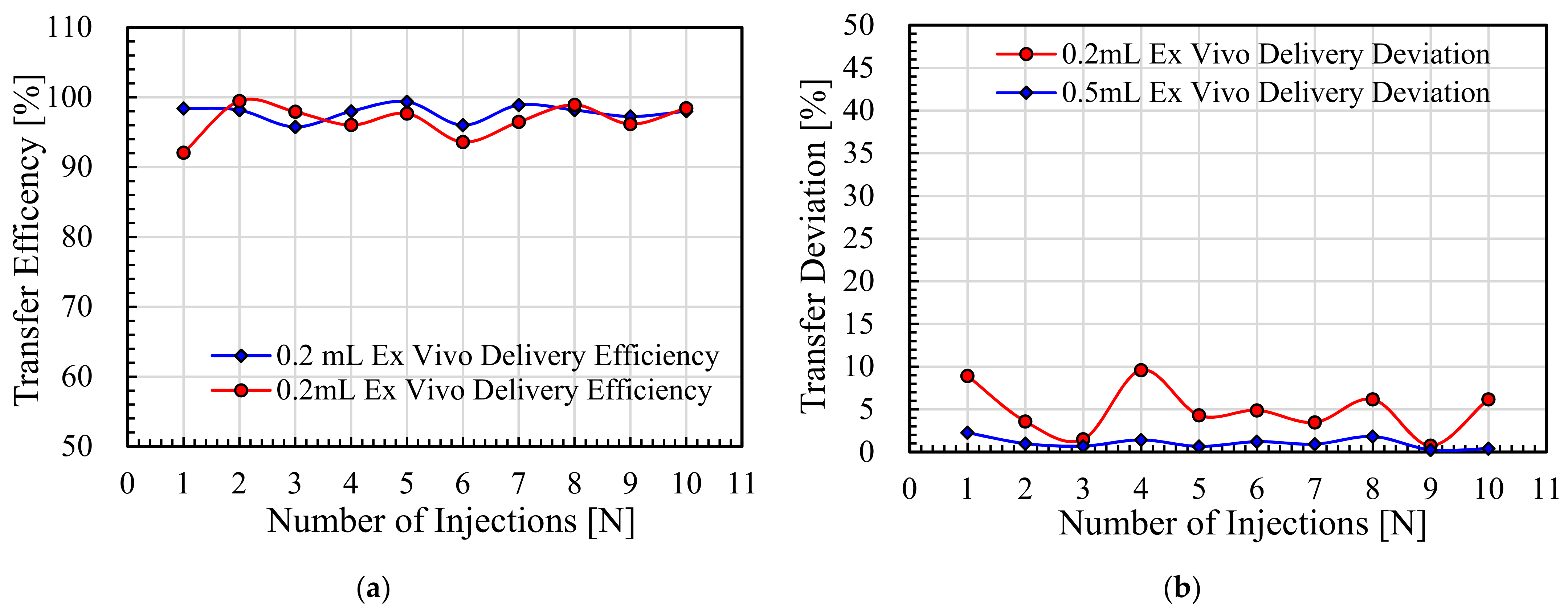
5.4. Ex Vivo Experiments and Volume Control
6. Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| No. | Disease | Vaccine | Administration | Dosage |
|---|---|---|---|---|
| 1 | Chickenpox | Varicella | Subcutaneous | 0.50 mL (2 doses) |
| 2 | Diphtheria | DTaP vaccine | Subcutaneous | 0.50 mL (3–4 doses) |
| 3 | Tetanus | DTaP vaccine | Subcutaneous/Intramuscular | 0.50 mL (4 doses) |
| 4 | Pertussis | DTaP vaccine | Subcutaneous | 0.50 mL (3 doses) |
| 5 | Hib | Haemophilus influenza | Subcutaneous/Intramuscular | 0.50 mL (3 doses) |
| 6 | Hepatitis A | HepA vaccine | Intramuscular | 0.5–1.0 mL (2 doses) |
| 7 | Hepatitis B | HepB vaccine | Intramuscular | 0.5–1.0 mL (2 doses) |
| 8 | Influenza (Flu) | Influenza vaccine | Intramuscular | 0.25–0.5 mL (1 dose) |
| 9 | Measles | MMR vaccine | Subcutaneous/Intramuscular | 0.50 mL (I dose) |
| 10 | Mumps | MMR II vaccine | Subcutaneous | 0.50 mL (I dose) |
| 11 | Rubella | MMR II vaccine | Subcutaneous/Intramuscular | 0.50 mL (I dose) |
| 12 | Pneumococcal | PCV13 vaccine | Intramuscular | 0.50 mL (2 doses) |
| 13 | Rotavirus | RV vaccine | Oral | 2 mL (3 doses) |
| 14 | Polio | IPV vaccine | Oral | 2 drops (0.1 mL) |
| 15 | Tuberculosis | BCG vaccine | Intradermal (only) | 0.05 mL–0.1 mL |
| 16 | Diabetes | Insulin | Intradermal/subcutaneous | 0.01 mL–0.5 mL |
References
- Mark, J.J. Reactions to Plague in the Ancient & Medieval World-World History Encyclopedia. 2020. Available online: https://www.worldhistory.org/article/1534/reactions-to-plague-in-the-ancient--medieval-world/ (accessed on 18 May 2021).
- Horgan, J. Antonine Plague-World History Encyclopedia. 2019. Available online: https://www.worldhistory.org/Antonine_Plague/ (accessed on 18 May 2021).
- Murphy, V. BBC NEWS|Health|Past Pandemics that Ravaged Europe. 2005. Available online: http://news.bbc.co.uk/2/hi/health/4381924.stm (accessed on 18 May 2021).
- Wade, L. From Black Death to fatal flu, past pandemics show why people on the margins suffer most. Science 2020. [Google Scholar] [CrossRef]
- Papagrigorakis, M.J.; Yapijakis, C.; Synodinos, P.N.; Baziotopoulou-Valavani, E. DNA examination of ancient dental pulp incriminates typhoid fever as a probable cause of the Plague of Athens. Int. J. Infect. Dis. 2006, 10, 206–214. [Google Scholar] [CrossRef]
- Olson, P.E.; Hames, C.S.; Benenson, A.S.; Genovese, E.N. The Thucydides Syndrome: Ebola Déjà Vu? (or Ebola Reemergent?). Emerg. Infect. Dis. 1996, 2, 155–156. [Google Scholar] [CrossRef] [PubMed]
- Boddu, S.H.S.; Kumari, S. A Short Review on the Intranasal Delivery of Diazepam for Treating Acute Repetitive Seizures. Pharmaceutics 2020, 12, 1167. [Google Scholar] [CrossRef]
- Permana, A.D.; McCrudden, M.T.C.; Donnelly, R.F. Enhanced Intradermal Delivery of Nanosuspensions of Antifilariasis Drugs Using Dissolving Microneedles: A Proof of Concept Study. Pharmaceutics 2019, 11, 346. [Google Scholar] [CrossRef]
- Bussio, J.I.; Molina-Perea, C.; González-Aramundiz, J.V. Hyaluronic Acid Nanocapsules as a Platform for Needle-Free Vaccination. Pharmaceutics 2019, 11, 246. [Google Scholar] [CrossRef] [PubMed]
- Liu, C.-Y.; Ko, H.-K.; Fink, J.B.; Wan, G.-H.; Huang, C.-C.; Chen, Y.-C.; Lin, H.-L. Size Distribution of Colistin Delivery by Different Type Nebulizers and Concentrations During Mechanical Ventilation. Pharmaceutics 2019, 11, 459. [Google Scholar] [CrossRef] [PubMed]
- Singh, B.; Shukla, N.; Kim, J.; Kim, K.; Park, M.-H. Stimuli-Responsive Nanofibers Containing Gold Nanorods for On-Demand Drug Delivery Platforms. Pharmaceutics 2021, 13, 1319. [Google Scholar] [CrossRef] [PubMed]
- Zeng, M.; Xu, Q.; Pichichero, M.E. Protection against anthrax by needle-free mucosal immunization with human anthrax vaccine. Vaccine 2007, 25, 3588–3594. [Google Scholar] [CrossRef]
- Baxter, J.R. Fundamental Mechanisms of Drug Delivery by Jet Injection: Basis for the Development of a Painless Microject Injector. Ph.D. Thesis, University of California Santa Barbara, Santa Barbara, CA, USA, 2004. [Google Scholar]
- Trimzi, M.A.; Ham, Y.-B.; An, B.-C.; Park, J.-H.; Yun, S.-N. Numerical analysis and simulation of an impulse driven piezoelectric needle-free jet injector. J. Mech. Sci. Technol. 2019, 33, 3851–3858. [Google Scholar] [CrossRef]
- Burkoth, T.L.; Bellhouse, B.J.; Hewson, G.; Longridge, D.J.; Muddle, A.G.; Sarphie, D.F. Transdermal and Transmucosal Powdered Drug Delivery. Crit. Rev. Ther. Drug Carr. Syst. 1999, 16, 331–384. [Google Scholar] [CrossRef]
- Davis, J.L.; Gilger, B.C.; Robinson, M.R. Novel approaches to ocular drug delivery. Curr. Opin. Mol. Ther. 2004, 6, 195–205. [Google Scholar]
- Le Bourlais, C.; Acar, L.; Zia, H.; Sado, P.A.; Needham, T.; Leverge, R. Ophthalmic drug delivery systems—Recent advances. Prog. Retin. Eye Res. 1998, 17, 33–58. [Google Scholar] [CrossRef]
- Lambkin, I.; Pinilla, C. Targeting approaches to oral drug delivery. Expert Opin. Biol. Ther. 2002, 2, 67–73. [Google Scholar] [CrossRef] [PubMed]
- Sastry, S.V.; Nyshadham, J.R.; Fix, J.A. Recent technological advances in oral drug delivery–A review. Pharm. Sci. Technol. Today 2000, 3, 138–145. [Google Scholar] [CrossRef]
- Hussain, A.A. Intranasal drug delivery. Adv. Drug Deliv. Rev. 1998, 29, 39–49. [Google Scholar] [CrossRef]
- Morita, T.; Yamahara, H. Nasal Delivery Systems. Biodrug Deliv. Syst. 2016, 29, 104–118. [Google Scholar] [CrossRef]
- Edwards, D.A.; Dunbar, C. Bioengineering of Therapeutic Aerosols. Annu. Rev. Biomed. Eng. 2002, 4, 93–107. [Google Scholar] [CrossRef] [PubMed]
- Hussain, A.; Ahsan, F. The vagina as a route for systemic drug delivery. J. Control. Release 2005, 103, 301–313. [Google Scholar] [CrossRef]
- Hingson, R.A.; Figge, F.H.J. A survey of the development of jet injection in parenteral therapy. Curr. Res. Anesth. Analg. 1952, 31, 361–366. [Google Scholar] [CrossRef] [PubMed]
- Simonsen, L.; Kane, A.; Lloyd, J.; Zaffran, M.; Kane, M. Unsafe injections in the developing world and transmission of bloodborne pathogens: A review. Bull. World Health Organ. 1999, 77, 789–800. [Google Scholar]
- Hauri, A.M.; Armstrong, G.L.; Hutin, Y.J.F. The global burden of disease attributable to contaminated injections given in health care settings. Int. J. STD AIDS 2004, 15, 7–16. [Google Scholar] [CrossRef] [PubMed]
- WHO guideline on the use of safety-engineered syringes for intramuscular, intradermal and subcutaneous injections in health-care settings. Med. Des. Mal. Metab. 2016, 11, 416–424. Available online: https://apps.who.int/iris/handle/10665/250144/ (accessed on 21 October 2021).
- Gopar-Nieto, R.; Juárez-Pérez, C.A.; Cabello-López, A.; Haro-García, L.C.; Aguilar-Madrid, G. Overview of sharps injuries among health-care workers. Rev. Med. Inst. Mex. Seguro Soc. 2015, 53, 356–361. [Google Scholar] [PubMed]
- Hambridge, K. Needlestick and sharps injuries in the nursing student population. Nurs. Stand. 2011, 25, 38–45. [Google Scholar] [CrossRef] [PubMed]
- Facts, G. Safety of injections. Indian Pediatr. 2000, 37, 345–347. [Google Scholar]
- Miller, M.A.; Pisani, E. The cost of unsafe injections. Bull. World Heal. Organ. 1999, 77, 808–811. Available online: http://www.ncbi.nlm.nih.gov/pubmed/10593028 (accessed on 19 May 2021).
- Patrick, D.L.; Murray, T.P.; Governor, L.; Bigby, J.; Services, H. Sharps Injuries Among Hospital Workers in Massachusetts. 2010. Available online: https://www.mass.gov/doc/sharps-injuries-among-hospital-workers-in-massachusetts-2010/download (accessed on 19 July 2021).
- Hemond, B.D. A Lorentz-Force Actuated Controllable Needle-Free Drug Delivery System. Master’s Thesis, Massachusetts Institute of Technology, Cambridge, MA, USA, 2006. [Google Scholar]
- Kose, S.; Mandiracioglu, A. Fear of blood/injection in healthy and unhealthy adults admitted to a teaching hospital. Int. J. Clin. Pr. 2007, 61, 453–457. [Google Scholar] [CrossRef] [PubMed]
- Hambridge, K.; Nichols, A.; Endacott, R. The impact of sharps injuries on student nurses: A systematic review. Br. J. Nurs. 2016, 25, 1064–1071. [Google Scholar] [CrossRef]
- Mitchell, A.E.P. Psychological distress in student nurses undertaking an educational programme with professional registration as a nurse: Their perceived barriers and facilitators in seeking psychological support. J. Psychiatr. Ment. Health Nurs. 2018, 25, 258–269. [Google Scholar] [CrossRef]
- Olatunji, B.O.; Williams, N.L.; Sawchuk, C.N.; Lohr, J.M. Disgust, anxiety and fainting symptoms associated with blood-injection-injury fears: A structural model. J. Anxiety Disord. 2006, 20, 23–41. [Google Scholar] [CrossRef]
- Breau, L.M.; McGrath, P.J.; Craig, K.D.; Santor, D.; Cassidy, K.-L.; Reid, G.J. Facial Expression of Children Receiving Immunizations: A Principal Components Analysis of the Child Facial Coding System. Clin. J. Pain 2001, 17, 178–186. [Google Scholar] [CrossRef]
- Nir, Y.; Paz, A.; Sabo, E.; Potasman, I. Fear of injections in young adults: Prevalence and associations. Am. J. Trop. Med. Hyg. 2003, 68, 341–344. [Google Scholar] [CrossRef]
- PharmaJet. Cost of Needle Injections. 2017. Available online: https://pharmajet.com/cost-of-needle-injections/ (accessed on 20 May 2021).
- Dziekan, G.; Chisholm, D.; Johns, B.; Rovira, J.; Hutin, Y.J.F. The cost-effectiveness of policies for the safe and appropriate use of injection in healthcare settings. Bull. World Health Organ. 2003, 81, 277–285. [Google Scholar] [CrossRef]
- Elder, A.; Paterson, C. Sharps injuries in UK health care: A review of injury rates, viral transmission and potential efficacy of safety devices. Occup. Med. 2006, 56, 566–574. [Google Scholar] [CrossRef] [PubMed]
- Pepin, J.; Chakra, C.N.A.; Pépin, E.; Nault, V. Evolution of the Global Use of Unsafe Medical Injections, 2000–2010. PLoS ONE 2013, 8, e80948. [Google Scholar] [CrossRef] [PubMed]
- Hayashi, T.; Hutin, Y.J.F.; Bulterys, M.; Altaf, A.; Allegranzi, B. Injection practices in 2011–2015: A rapid review using data from the Demographic and Health Surveys (DHS). bioRxiv 2019, 9, 1–10. [Google Scholar] [CrossRef]
- Micro Dispensing Valve-MDV 3200A: VERMES Microdispensing GmbH. Available online: https://www.vermes.com/en/micro-dispensing-systems/mds-micro-dispensing-systems/micro-dispensing-system-mds-3200-series/micro-dispensing-valve-mdv-3200a/ (accessed on 20 December 2019).
- Langford, R.M.; Rawal, N. A new needle-free PCA system: The fentanyl iontophoretic transdermal system. Acute Pain 2006, 8, 151–153. [Google Scholar] [CrossRef]
- Misra, A. Needle-free, non-adjuvanted skin immunization by electroporation-enhanced transdermal delivery of diphtheria toxoid and a candidate peptide vaccine against hepatitis B virus. Vaccine 1999, 18, 517–523. [Google Scholar] [CrossRef]
- Wang, S.; Zhang, C.; Zhang, L.; Li, J.; Huang, Z.; Lu, S. The relative immunogenicity of DNA vaccines delivered by the intramuscular needle injection, electroporation and gene gun methods. Vaccine 2008, 26, 2100–2110. [Google Scholar] [CrossRef]
- Wong, T.-W.; Chen, C.-H.; Huang, C.-C.; Lin, C.-D.; Hui, S.-W. Painless electroporation with a new needle-free microelectrode array to enhance transdermal drug delivery. J. Control. Release 2006, 110, 557–565. [Google Scholar] [CrossRef] [PubMed]
- Kendall, M. Engineering of needle-free physical methods to target epidermal cells for DNA vaccination. Vaccine 2006, 24, 4651–4656. [Google Scholar] [CrossRef] [PubMed]
- Arora, A.; Prausnitz, M.R.; Mitragotri, S. Micro-scale devices for transdermal drug delivery. Int. J. Pharm. 2008, 364, 227–236. [Google Scholar] [CrossRef] [PubMed]
- Hogan, N.C.; Taberner, A.; A Jones, L.; Hunter, I.W. Needle-free delivery of macromolecules through the skin using controllable jet injectors. Expert Opin. Drug Deliv. 2015, 12, 1637–1648. [Google Scholar] [CrossRef] [PubMed]
- Wang, X.; Ren, T.; Yang, P.H. Vaccine and Needle-Free Vaccination Delivery System. J. Microb. Biochem. Technol. 2014, 6, 359–360. [Google Scholar] [CrossRef]
- Zeng, D.; Wu, N.; Qian, L.; Shi, H.; Kang, Y. Experimental investigation on penetration performance of larger volume needle-free injection device. J. Mech. Sci. Technol. 2020, 34, 3897–3909. [Google Scholar] [CrossRef]
- Prausnitz, M.R.; Mitragotri, S.; Langer, R. Current status and future potential of transdermal drug delivery. Nat. Rev. Drug Discov. 2004, 3, 115–124. [Google Scholar] [CrossRef]
- Baxter, J.; Mitragotri, S. Jet-induced skin puncture and its impact on needle-free jet injections: Experimental studies and a predictive model. J. Control. Release 2005, 106, 361–373. [Google Scholar] [CrossRef]
- Scheiblhofer, S.; Thalhamer, J.; Weiss, R. Laser microporation of the skin: Prospects for painless application of protective and therapeutic vaccines. Expert Opin. Drug Deliv. 2013, 44, 761–773. [Google Scholar] [CrossRef]
- Kim, Y.C.; Jarrahian, C.; Zehrung, D.; Mitragotri, S.; Prausnitz, M.R. Delivery Systems for Intradermal Vaccination. Curr. Top. Microbiol. Immunol. 2011, 37, 77–112. [Google Scholar] [CrossRef]
- Mitragotri, S. Immunization without needles. Nat. Rev. Immunol. 2005, 5, 905–916. [Google Scholar] [CrossRef] [PubMed]
- Ma, G.; Wu, C. Microneedle, bio-microneedle and bio-inspired microneedle: A review. J. Control. Release 2017, 251, 11–23. [Google Scholar] [CrossRef]
- Bhatnagar, S.; Dave, K.; Venuganti, V.V.K. Microneedles in the clinic. J. Control. Release 2017, 260, 164–182. [Google Scholar] [CrossRef]
- Dugam, S.; Tade, R.; Dhole, R.; Nangare, S. Emerging era of microneedle array for pharmaceutical and biomedical applications: Recent advances and toxicological perspectives. Futur. J. Pharm. Sci. 2021, 7, 1–26. [Google Scholar] [CrossRef]
- Lee, Y.; Dugansani, S.R.; Jeon, S.H.; Hwang, S.H.; Kim, J.H.; Park, S.H.; Jeong, J.H. Drug-Delivery System Based on Salmon DNA Nano- and Micro-Scale Structures. Sci. Rep. 2017, 7, 9724. [Google Scholar] [CrossRef] [PubMed]
- Lee, Y. Drug-Delivery System Based on Salmon DNA Nano- and Micro-Scale Structures. Master’s Thesis, University of Science & Technology, Daejeon, Korea, 2017. [Google Scholar]
- Bok, M.; Zhao, Z.-J.; Jeon, S.; Jeong, J.-H.; Lim, E. Ultrasonically and Iontophoretically Enhanced Drug-Delivery System Based on Dissolving Microneedle Patches. Sci. Rep. 2020, 10, 2027. [Google Scholar] [CrossRef]
- Zempsky, W.T.; Robbins, B.; Richards, P.T.; Leong, M.S.; Schechter, N.L. A Novel Needle-Free Powder Lidocaine Delivery System for Rapid Local Analgesia. J. Pediatr. 2008, 152, 405–412. [Google Scholar] [CrossRef]
- Glenn, G.M.; Kenney, R.T.; Ellingsworth, L.R.; A Frech, S.; A Hammond, S.; Zoeteweij, J.P. Transcutaneous immunization and immunostimulant strategies: Capitalizing on the immunocompetence of the skin. Expert Rev. Vaccines 2003, 2, 253–267. [Google Scholar] [CrossRef]
- Prausnitz, M.R. Microneedles for transdermal drug delivery. Adv. Drug Deliv. Rev. 2004, 56, 581–587. [Google Scholar] [CrossRef]
- Mitragotri, S.; Kost, J. Low-frequency sonophoresis: A review. Adv. Drug Deliv. Rev. 2004, 56, 589–601. [Google Scholar] [CrossRef] [PubMed]
- Denet, A.-R.; Vanbever, R.; Préat, V. Skin electroporation for transdermal and topical delivery. Adv. Drug Deliv. Rev. 2004, 56, 659–674. [Google Scholar] [CrossRef]
- Cevc, G. Lipid vesicles and other colloids as drug carriers on the skin. Adv. Drug Deliv. Rev. 2004, 56, 675–711. [Google Scholar] [CrossRef]
- Ziegler, A. Needle-free injection—Science fiction or comeback of an almost forgotten drug delivery system? Med. Monatsschr. Pharm. 2007, 30, 297–303. [Google Scholar]
- Berríos-Torres, S.I.; Umscheid, C.A.; Bratzler, D.; Leas, B.; Stone, E.C.; Kelz, R.R.; Reinke, C.E.; Morgan, S.; Solomkin, J.; Mazuski, J.E.; et al. Centers for Disease Control and Prevention Guideline for the Prevention of Surgical Site Infection, 2017. JAMA Surg. 2017, 152, 784–791. [Google Scholar] [CrossRef]
- Weniger, B.G. Needle-Free Jet Injection Bibliography, Device & Manufacturer Roster. 2000. Available online: http://www.hcvets.com/data/occupational/munji/2004_Jetinject_Bib.pdf (accessed on 19 July 2021).
- Workowski, K.A.; Berman, S.M. Centers for Disease Control and Prevention Sexually Transmitted Disease Treatment Guidelines. Clin. Infect. Dis. 2011, 53 (Suppl. 3), 59–63. [Google Scholar] [CrossRef]
- Food and Drug Administration. Technical Considerations for Pen, Jet, and Related Injectors Intended for Use with Drugs and Biological Products. Md 2013, 20993, 301–796. Available online: http://www.fda.gov/CombinationProducts/default.htm (accessed on 21 October 2021).
- Stoitzner, P.; Holzmann, S.; McLellan, A.D.; Ivarsson, L.; Stössel, H.; Kapp, M.; Kämmerer, U.; Douillard, P.; Kämpgen, E.; Koch, F.; et al. Visualization and Characterization of Migratory Langerhans Cells in Murine Skin and Lymph Nodes by Antibodies Against Langerin/CD207. J. Investig. Dermatol. 2003, 120, 266–274. [Google Scholar] [CrossRef]
- Gockel, C. Transcutaneous immunization induces mucosal and systemic immunity: A potent method for targeting immunity to the female reproductive tract. Mol. Immunol. 2000, 37, 537–544. [Google Scholar] [CrossRef]
- Glenn, G.M.; Scharton-Kersten, T.; Vassell, R.; Mallett, C.P.; Hale, T.L.; Alving, C.R. Transcutaneous immunization with cholera toxin protects mice against lethal mucosal toxin challenge. J. Immunol. 1998, 161, 3211–3214. [Google Scholar] [PubMed]
- Ren, S.; Li, M.; Smith, J.M.; DeTolla, L.J.; A Furth, P. Low-volume jet injection for intradermal immunization in rabbits. BMC Biotechnol. 2002, 2, 2–7. [Google Scholar] [CrossRef] [PubMed]
- Kenney, R.T.; Frech, S.A.; Muenz, L.R.; Villar, C.P.; Glenn, G.M. Dose Sparing with Intradermal Injection of Influenza Vaccine. N. Engl. J. Med. 2004, 351, 2295–2301. [Google Scholar] [CrossRef] [PubMed]
- Robinson, H.L. DNA vaccines. Clin. Microbiol. Newsl. 2000, 22, 17–22. [Google Scholar] [CrossRef]
- Ferayorni, A.; Yniguez, R.; Bryson, M.; Bulloch, B. Needle-Free Jet Injection of Lidocaine for Local Anesthesia During Lumbar Puncture. Pediatr. Emerg. Care 2012, 28, 687–690. [Google Scholar] [CrossRef] [PubMed]
- Kelly, S.; Russell, J.; Devgon, P.; Rosen, P. Transformation of the peripheral intravenous catheter placement experience in pediatrics. J. Vasc. Access 2017, 18, 259–263. [Google Scholar] [CrossRef]
- Hajimaghsoudi, M.; Vahidi, E.; Momeni, M.; Arabinejhad, A.; Saeedi, M. Comparison of local anesthetic effect of lidocaine by jet injection vs needle infiltration in lumbar puncture. Am. J. Emerg. Med. 2016, 34, 1225–1229. [Google Scholar] [CrossRef]
- Weller, C. Jet Injection of Insulin vs the Syringe-and-Needle Method. J. Am. Med. Assoc. 1966, 195, 844–847. [Google Scholar] [CrossRef]
- Taberner, A.; Hogan, N.C.; Hunter, I.W. Needle-free jet injection using real-time controlled linear Lorentz-force actuators. Med. Eng. Phys. 2012, 34, 1228–1235. [Google Scholar] [CrossRef] [PubMed]
- Hogan, N.C.; Anahtar, M.N.; Taberner, A.J.; Hunter, I.W. Delivery of immunoreactive antigen using a controllable needle-free jet injector. J. Control. Release 2017, 258, 73–80. [Google Scholar] [CrossRef]
- Trimzi, M.A.; Ham, Y.-B.; An, B.-C.; Park, J.-H.; Yun, S.-N.; Lee, K.-N. Design of Auto-Loading Sequence Circuit for Compressed Gas Needle Free Injector. In Proceedings of the 22nd International Conference on Mechatronics Technology (ICMT), Seogwipo KAL Hotel, Jeju Island, Korea, 26–29 October 2018. [Google Scholar]
- Trimzi, M.A.; Ham, Y.-B.; An, B.-C.; Kanwal, T.; Park, J.-H.; Yun, S.-N. Investigation of Compressed Air-Power Driven Needle-Free Injection Device for Variable Volume Delivery. In Proceedings of the International Symposium on Precision Engineering and Sustainable Manufacturing 2021 (PRESM2021), Ramada Plaza Jeju Hotel, Jeju, Korea, 21–23 July 2021; p. 54. [Google Scholar]
- Simon, J.K.; Carter, M.; Pasetti, M.F.; Sztein, M.B.; Kotloff, K.L.; Weniger, B.G.; Campbell, J.D.; Levine, M.M. Safety, tolerability, and immunogenicity of inactivated trivalent seasonal influenza vaccine administered with a needle-free disposable-syringe jet injector. Vaccine 2011, 29, 9544–9550. [Google Scholar] [CrossRef]
- Nordlund, M.; Kim, S.-G.; Tate, D.; Lee, T.; Oh, H. Axiomatic Design: Making the Abstract Concrete. Procedia CIRP 2016, 50, 216–221. [Google Scholar] [CrossRef]
- Park, G.-J. Teaching conceptual design using axiomatic design to engineering students and practitioners. J. Mech. Sci. Technol. 2014, 28, 989–998. [Google Scholar] [CrossRef]
- E. Group. Design and Analyze Your Multi-Physics System with SimulationX Software by ITI GmbH. Available online: https://www.esi-group.com/ (accessed on 21 October 2021).
- Trimzi, M.A.; Ham, Y.-B.; An, B.-C.; Kim, H.-U.; Park, J.-H.; Yun, S.-N. Feasibility Study for Piezoelectric Control of Needle-free Transdermal Drug Delivery by SimulationX. In Proceedings of the 2019 KSPSE Spring Conference, Pukyoung National University, Busan, Korea, 30–31 May 2019. [Google Scholar]
- Ham, Y.-B.; An, B.-C.; Trimzi, M.A.; Park, J.-H.; Yun, S.-N. Numerical Analysis on Piezoelectrically Driven Jet Dispensing Mechanism for Nanoliter Droplet of High Viscosity Liquid. J. Nanosci. Nanotechnol. 2019, 19, 1843–1847. [Google Scholar] [CrossRef] [PubMed]
- Trimzi, M.A.; Ham, Y.-B.; An, B.-C.; Park, J.-H.; Yun, S.-N.; Shin, H. Development of viscous fluid jet dispenser using multilayer piezoelectric actuator with hinge-lever type displacement amplification mechanism. In Proceedings of the 5th International Conference on Advanced Electromaterials (ICAE), Ramada Plaza Jeju Hotel, Jeju, Korea, 5–8 November 2019. [Google Scholar]
- SMC Inc. 3/2 Pilot-Operated Pneumatic Direction Control Valve (Model: SYJA712). Available online: https://www.smcworld.com/en-jp/ (accessed on 21 October 2021).
- Trimzi, M.A.; Ham, Y.-B.; Seo, J.-H.; Shin, G.-N.; Park, J.-H.; Yun, S.-N. Time Delay Measurement using Multiple Orifices for Sequence Control of Injection Device. In Proceedings of the 7th International Conference of Asian Society for Precision Engineering and Nanotechnology (ASPEN 2017), COEX, Seoul, Korea, 14–17 November 2017. [Google Scholar]
- General Purpose Silicone. Available online: https://www.brookfieldengineering.com/products/viscosity-standards/general-purpose-silicone (accessed on 20 December 2019).
- Trimzi, M.A.; Ham, Y.-B.; An, B.-C.; Kim, H.-U.; Park, J.-H.; Yun, S.-N. Injection Volume Control Using Impulse Pressure by Piston Movement. In Proceedings of the 2018 KSPSE Fall Conference on Power System Engineering, Pukyoung National University, Busan, Korea, 1–2 November 2018. [Google Scholar]

















| Parameter | Value | Unit |
|---|---|---|
| HP Plunger Diameter | 4.5 | (mm) |
| LP Piston Diameter | 50 | (mm) |
| Stroke Length | 38 | (mm) |
| Inlet Pressure | 0.2–0.5 | (MPa) |
| Outlet Pressure | 15–45 | (MPa) |
| Spring Constant | 2.13 | (N/mm) |
| Parameter | Value | Unit |
|---|---|---|
| Vaccine Name | Merial 206 | (-) |
| Conductivity | 0.7 | (mS/cm) |
| Droplet Size | 3956.6 | (µm) |
| pH | 8.17 | (-) |
| Density | 0.94 | (g/cm3) |
| Viscosity | 170 | cP |
| Parameter | Formula |
|---|---|
| Injection volume (mL) | (④ − ⑤) ÷ ② |
| Drug transfer efficiency (%) | (④ − ⑥)/(④ − ⑤) × 100 |
| Drug transfer deviation (%) | abs.[avg.[(④ − ⑥)] − (④ − ⑥)]/avg.[(④ − ⑥)] × 100 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Trimzi, M.A.; Ham, Y.-B. A Needle-Free Jet Injection System for Controlled Release and Repeated Biopharmaceutical Delivery. Pharmaceutics 2021, 13, 1770. https://doi.org/10.3390/pharmaceutics13111770
Trimzi MA, Ham Y-B. A Needle-Free Jet Injection System for Controlled Release and Repeated Biopharmaceutical Delivery. Pharmaceutics. 2021; 13(11):1770. https://doi.org/10.3390/pharmaceutics13111770
Chicago/Turabian StyleTrimzi, Mojiz Abbas, and Young-Bog Ham. 2021. "A Needle-Free Jet Injection System for Controlled Release and Repeated Biopharmaceutical Delivery" Pharmaceutics 13, no. 11: 1770. https://doi.org/10.3390/pharmaceutics13111770