
Evaluating the Performance of High-Altitude Aerial Image-Based Digital Surface Models in Detecting Individual Tree Crowns in Mature Boreal Forests

 ,
,  , , ,
, , ,
Abstract
:
1. Introduction
2. Materials and Methods
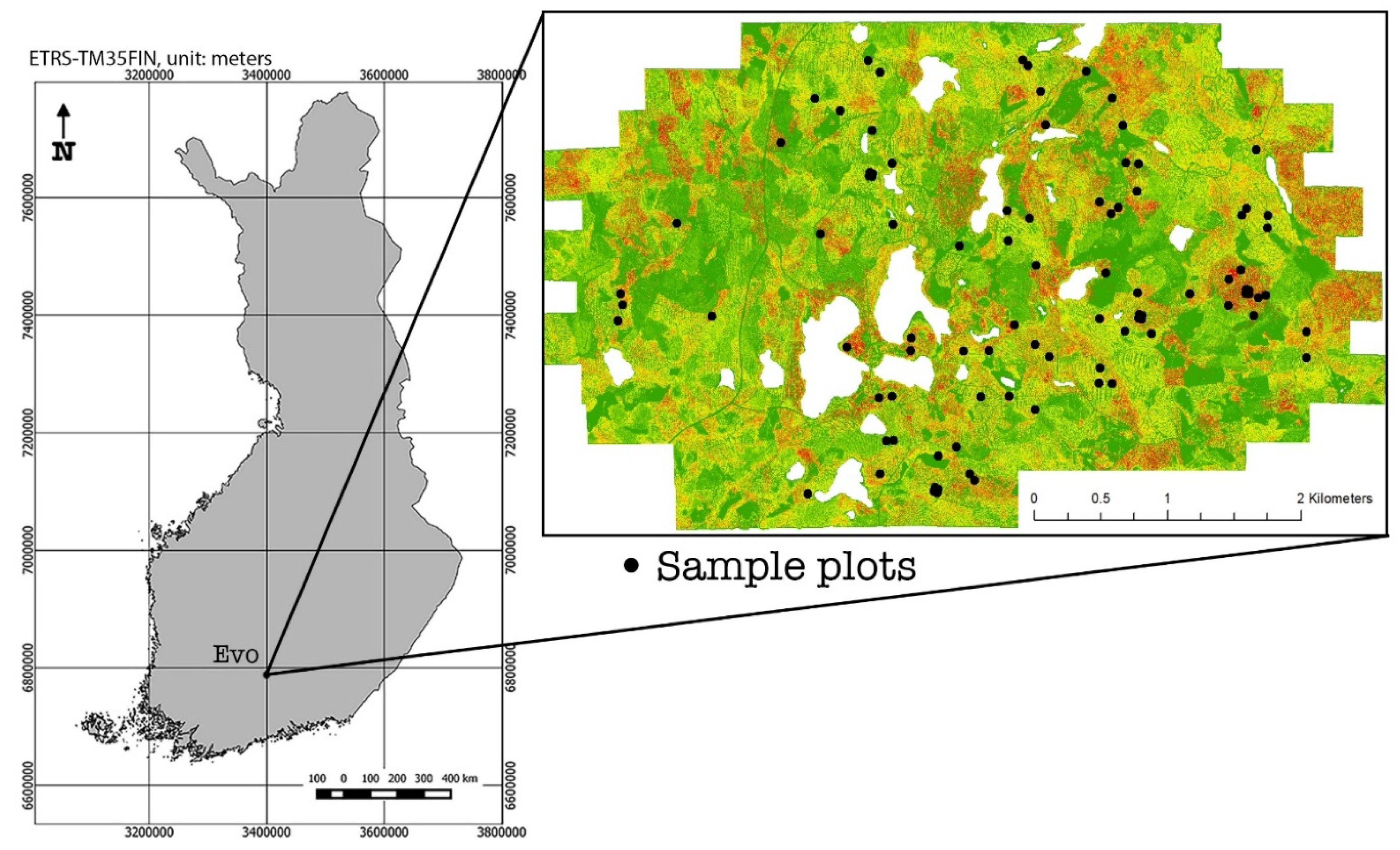
2.1. Test Site
2.2. Field Data
2.3. Aerial Images and Processing into Digital Surface Model
2.4. Quantifying and Visualizing the Effects of CHM Preprocessing
2.5. Tree Delineation and Height Extraction
2.6. Accuracy Assessment
3. Results and Discussion
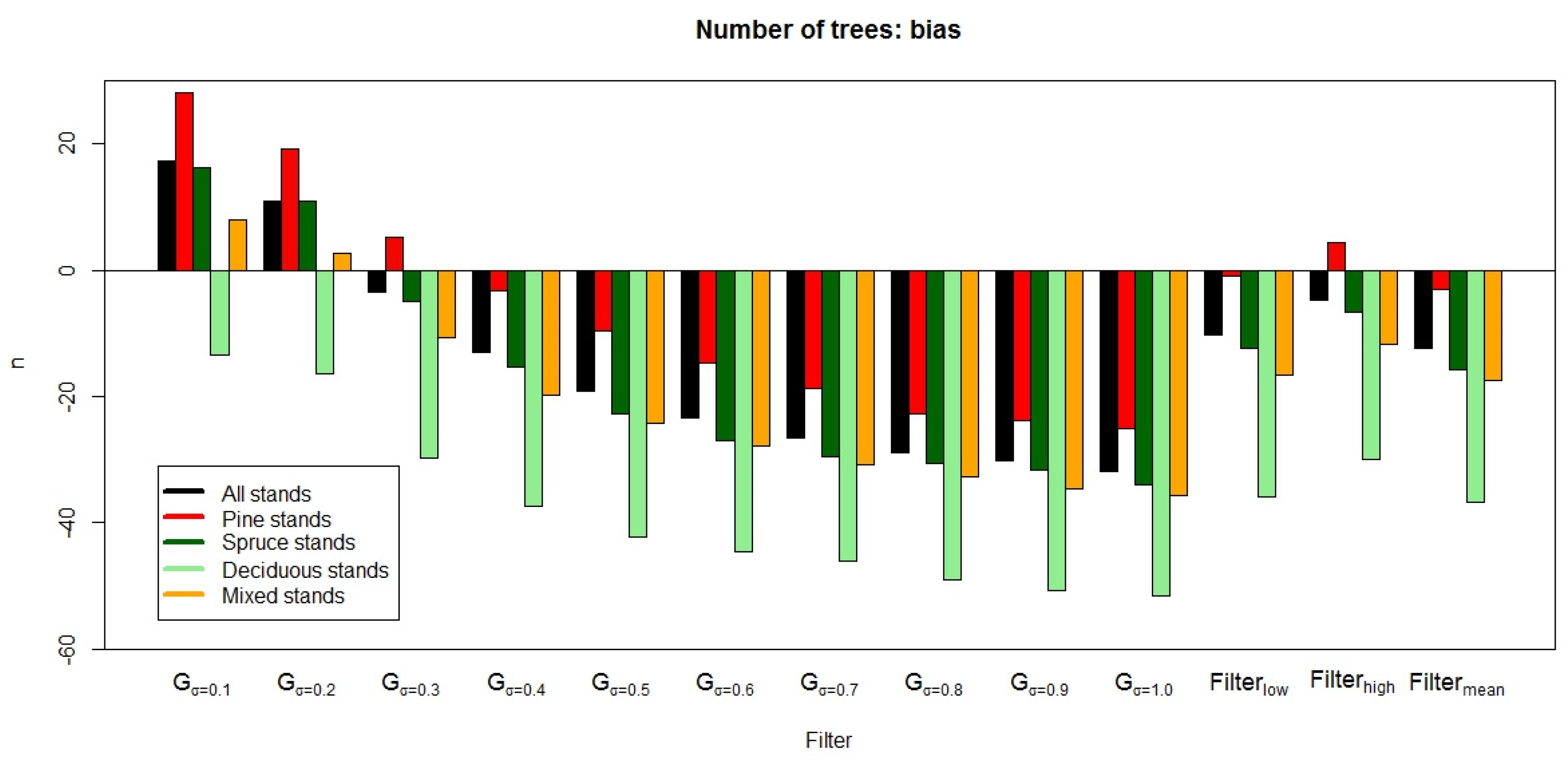
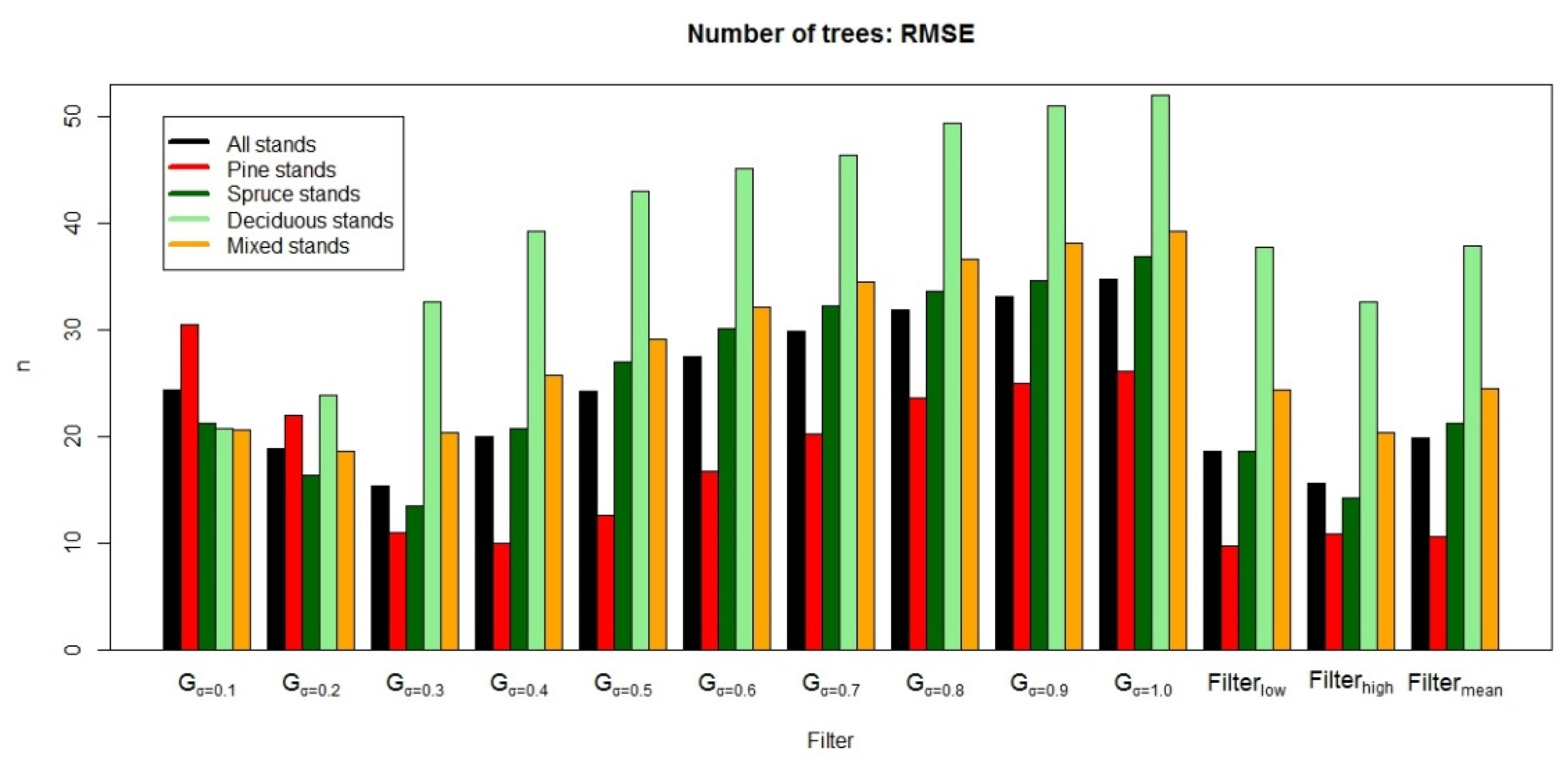
3.1. Tree Detection
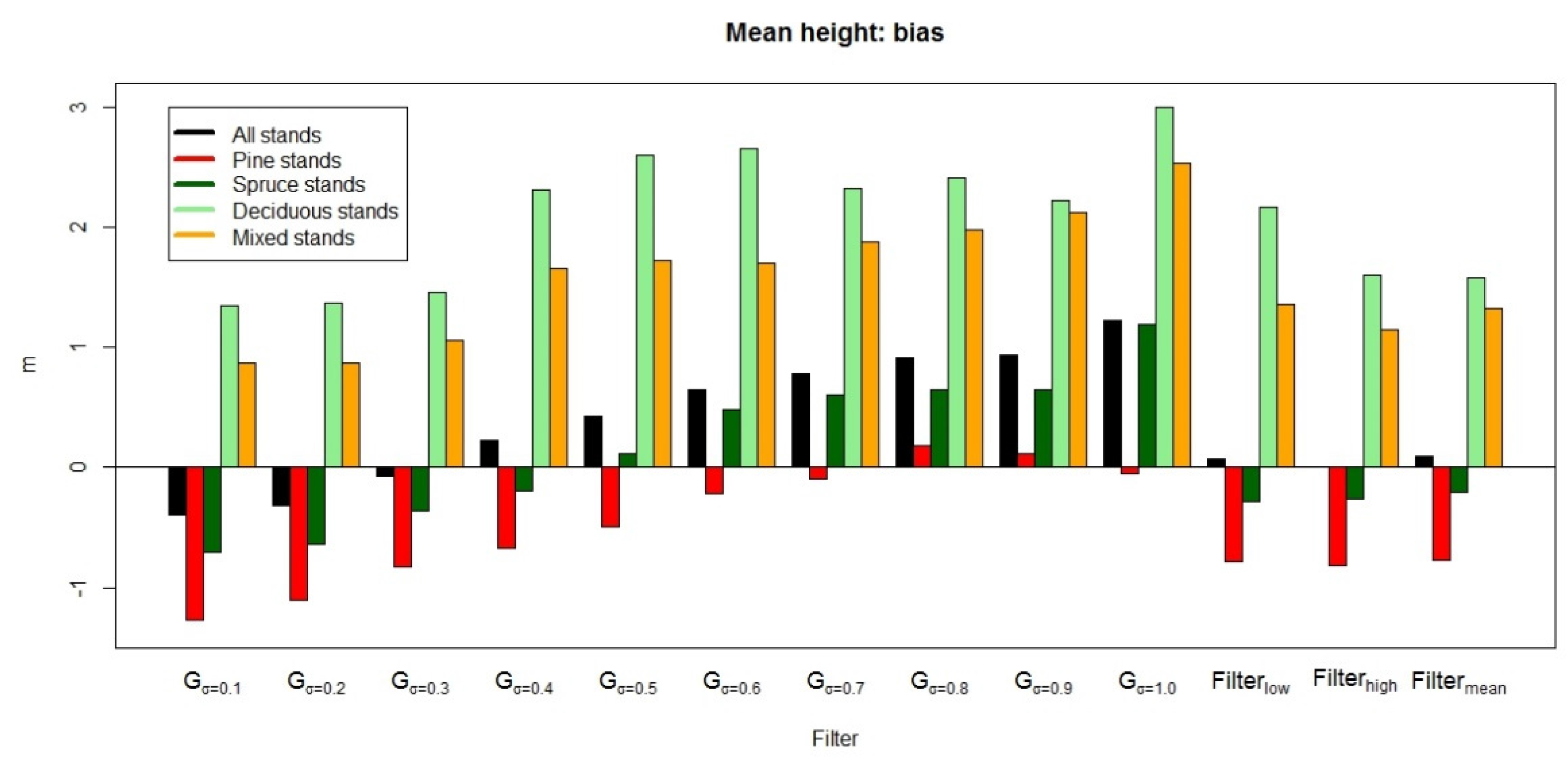
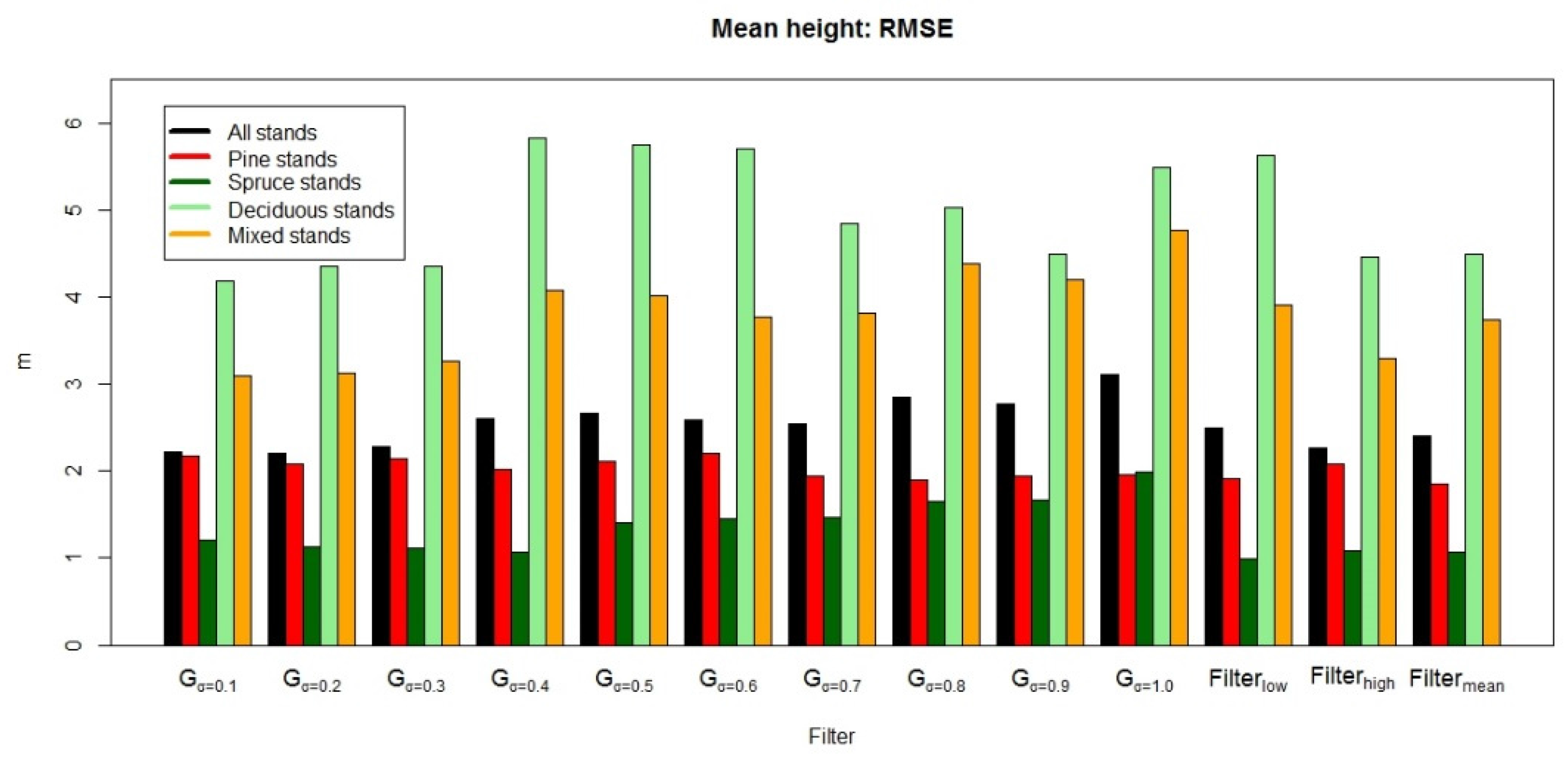
3.2. Estimated Mean Height
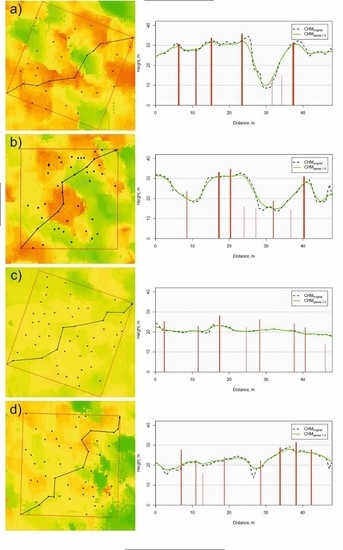
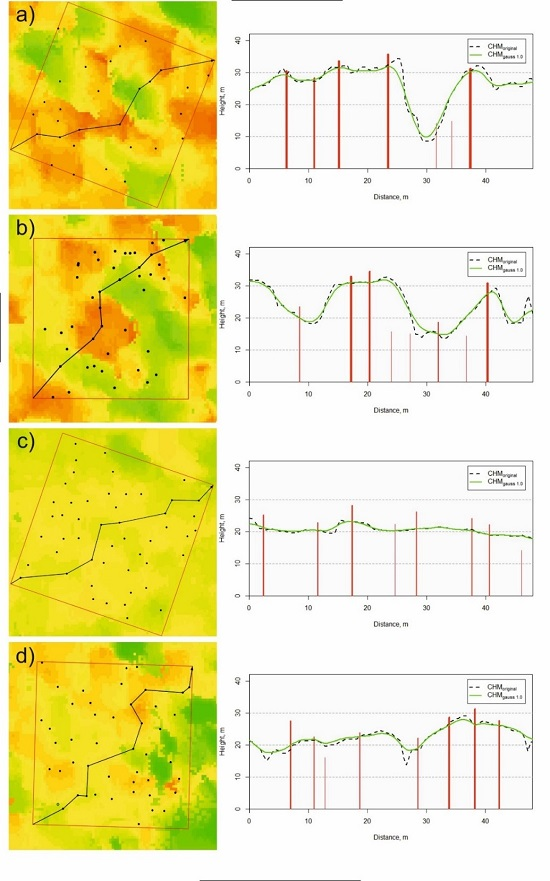
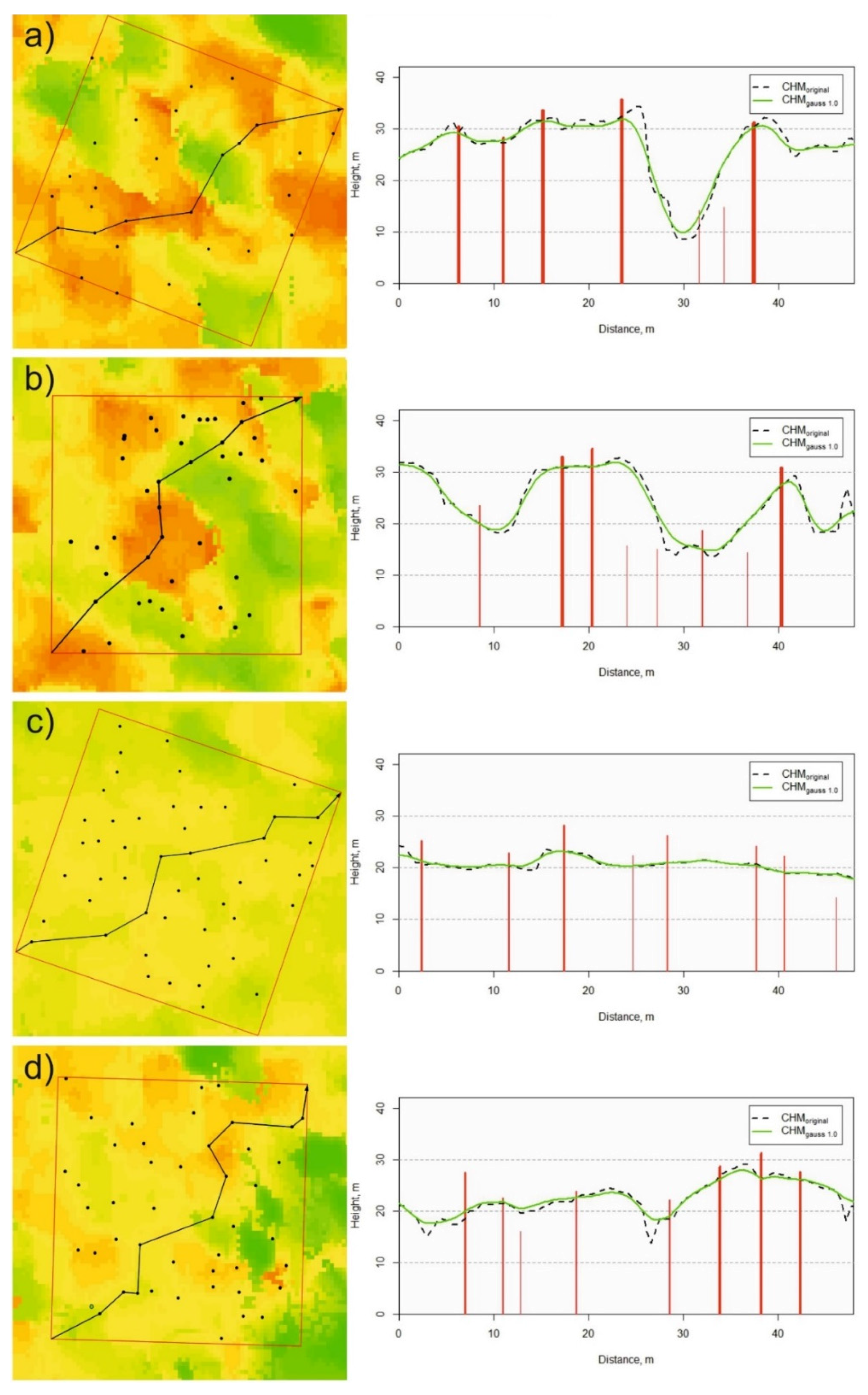
3.3. Height Profiles
3.4. Height Distributions
4. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Næsset, E.; Gobakken, T.; Holmgren, J.; Hyyppä, H.; Hyyppä, J.; Maltamo, M.; Nilsson, M.; Olsson, H.; Persson, Å.; Söderman, U. Laser scanning of forest resources: The nordic experience. Scand. J. For. Res. 2004, 19, 482–499. [Google Scholar] [CrossRef]
- Maltamo, M.; Packalen, P. Species-Specific management inventory in finland. In Forestry Applications of Airborne Laser Scanning; Maltamo, M., Næsset, E., Vauhkonen, J., Eds.; Springer: Dordrecht, The Netherlands, 2014; pp. 241–252. [Google Scholar]
- White, J.C.; Stepper, C.; Tompalski, P.; Coops, N.C.; Wulder, M.A. Comparing als and image-based point cloud metrics and modelled forest inventory attributes in a complex coastal forest environment. Forests 2015, 6, 3704–3732. [Google Scholar] [CrossRef]
- Wulder, M.A.; White, J.C.; Nelson, R.F.; Næsset, E.; Ørka, H.O.; Coops, N.C.; Hilker, T.; Bater, C.W.; Gobakken, T. Lidar sampling for large-area forest characterization: A review. Remote Sens. Environ. 2012, 121, 196–209. [Google Scholar] [CrossRef]
- Maltamo, M.; Eerikäinen, K.; Packalén, P.; Hyyppä, J. Estimation of stem volume using laser scanning-based canopy height metrics. Forestry 2006, 79, 217–229. [Google Scholar] [CrossRef]
- Holopainen, M.; Mäkinen, A.; Rasinmäki, J.; Hyyppä, J.; Hyyppä, H.; Kaartinen, H.; Viitala, R.; Vastaranta, M.; Kangas, A. Effect of tree-level airborne laser-scanning measurement accuracy on the timing and expected value of harvest decisions. Eur. J. For. Res. 2010, 129, 899–907. [Google Scholar] [CrossRef]
- Kaartinen, H.; Hyyppä, J. Eurosdr/isprs commission II project: “Tree extraction”—Final report. Off. Publ. 2008, 53, 60. [Google Scholar]
- Vauhkonen, J.; Ene, L.; Gupta, S.; Heinzel, J.; Holmgren, J.; Pitkänen, J.; Solberg, S.; Wang, Y.; Weinacker, H.; Hauglin, K.M. Comparative testing of single-tree detection algorithms under different types of forest. Forestry 2012. [Google Scholar] [CrossRef]
- Peuhkurinen, J.; Maltamo, M.; Malinen, J.; Pitkänen, J.; Packalén, P. Preharvest measurement of marked stands using airborne laser scanning. For. Sci. 2007, 53, 653–661. [Google Scholar]
- Holopainen, M.; Kankare, V.; Vastaranta, M.; Liang, X.; Lin, Y.; Vaaja, M.; Yu, X.; Hyyppä, J.; Hyyppä, H.; Kaartinen, H. Tree mapping using airborne, terrestrial and mobile laser scanning–A case study in a heterogeneous urban forest. Urban For. Urban Green. 2013, 12, 546–553. [Google Scholar] [CrossRef]
- Kaartinen, H.; Hyyppä, J.; Yu, X.; Vastaranta, M.; Hyyppä, H.; Kukko, A.; Holopainen, M.; Heipke, C.; Hirschmugl, M.; Morsdorf, F. An international comparison of individual tree detection and extraction using airborne laser scanning. Remote Sens. 2012, 4, 950–974. [Google Scholar] [CrossRef] [Green Version]
- Vastaranta, M.; Holopainen, M.; Yu, X.; Hyyppä, J.; Mäkinen, A.; Rasinmäki, J.; Melkas, T.; Kaartinen, H.; Hyyppä, H. Effects of individual tree detection error sources on forest management planning calculations. Remote Sens. 2011, 3, 1614–1626. [Google Scholar] [CrossRef]
- Maltamo, M.; Eerikäinen, K.; Pitkänen, J.; Hyyppä, J.; Vehmas, M. Estimation of timber volume and stem density based on scanning laser altimetry and expected tree size distribution functions. Remote Sens. Environ. 2004, 90, 319–330. [Google Scholar] [CrossRef]
- Hyyppä, J.; Yu, X.; Hyyppä, H.; Vastaranta, M.; Holopainen, M.; Kukko, A.; Kaartinen, H.; Jaakkola, A.; Vaaja, M.; Koskinen, J. Advances in forest inventory using airborne laser scanning. Remote Sens. 2012, 4, 1190–1207. [Google Scholar] [CrossRef]
- Koch, B.; Heyder, U.; Weinacker, H. Detection of individual tree crowns in airborne lidar data. Photogramm. Eng. Remote Sens. 2006, 72, 357–363. [Google Scholar] [CrossRef]
- Pitkänen, J.; Maltamo, M.; Hyyppä, J.; Yu, X. Adaptive methods for individual tree detection on airborne laser based canopy height model. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2004, 36, 187–191. [Google Scholar]
- Soille, P. Morphological Image Analysis: Principles and Applications; Springer: New York, NY, USA, 2003. [Google Scholar]
- Solberg, S.; Naesset, E.; Bollandsas, O.M. Single tree segmentation using airborne laser scanner data in a structurally heterogeneous spruce forest. Photogramm. Eng. Remote Sens. 2006, 72, 1369–1378. [Google Scholar] [CrossRef]
- Popescu, S.C. Estimating biomass of individual pine trees using airborne lidar. Biomass Bioenergy 2007, 31, 646–655. [Google Scholar] [CrossRef]
- Cochrane, M. Using vegetation reflectance variability for species level classification of hyperspectral data. Int. J. Remote Sens. 2000, 21, 2075–2087. [Google Scholar] [CrossRef]
- Held, A.; Ticehurst, C.; Lymburner, L.; Williams, N. High resolution mapping of tropical mangrove ecosystems using hyperspectral and radar remote sensing. Int. J. Remote Sens. 2003, 24, 2739–2759. [Google Scholar] [CrossRef]
- Key, T.; Warner, T.A.; McGraw, J.B.; Fajvan, M.A. A comparison of multispectral and multitemporal information in high spatial resolution imagery for classification of individual tree species in a temperate hardwood forest. Remote Sens. Environ. 2001, 75, 100–112. [Google Scholar] [CrossRef]
- Korpela, I. Individual Tree Measurements by Means of Digital Aerial Photogrammetry; Finnish Society of Forest Science: Helsinki, Finland, 2004; Volume 3. [Google Scholar]
- Pu, R.; Gong, P. Band selection from hyperspectral data for conifer species identification. Geogr. Inf. Sci. 2000, 6, 137–142. [Google Scholar] [CrossRef]
- Yu, B.; Gong, P.; Pu, R. Penalized discriminant analysis of in situ hyperspectral data for conifer species recognition. IEEE Trans. Geosci. Remote Sens. 1999, 37, 2569–2577. [Google Scholar] [CrossRef]
- Baltsavias, E.; Gruen, A.; Eisenbeiss, H.; Zhang, L.; Waser, L. High-Quality image matching and automated generation of 3d tree models. Int. J. Remote Sens. 2008, 29, 1243–1259. [Google Scholar] [CrossRef]
- Bohlin, J.; Wallerman, J.; Fransson, J.E. Forest variable estimation using photogrammetric matching of digital aerial images in combination with a high-resolution dem. Scand. J. Forest Res. 2012, 27, 692–699. [Google Scholar] [CrossRef]
- Nurminen, K.; Karjalainen, M.; Yu, X.; Hyyppä, J.; Honkavaara, E. Performance of dense digital surface models based on image matching in the estimation of plot-level forest variables. ISPRS J. Photogramm. Remote Sens. 2013, 83, 104–115. [Google Scholar] [CrossRef]
- Rosnell, T.; Honkavaara, E. Point cloud generation from aerial image data acquired by a quadrocopter type micro unmanned aerial vehicle and a digital still camera. Sensors 2012, 12, 453–480. [Google Scholar] [CrossRef] [PubMed]
- Straub, C.; Stepper, C.; Seitz, R.; Waser, L.T. Potential of ultracamx stereo images for estimating timber volume and basal area at the plot level in mixed european forests. Can. J. Forest Res. 2013, 43, 731–741. [Google Scholar] [CrossRef]
- Hirschmüller, H. Stereo processing by semiglobal matching and mutual information. IEEE Trans. Pattern Anal. Mach. Intell. 2008, 30, 328–341. [Google Scholar] [CrossRef] [PubMed]
- St-Onge, B.; Vega, C.; Fournier, R.; Hu, Y. Mapping canopy height using a combination of digital stereo-photogrammetry and lidar. Int. J. Remote Sens. 2008, 29, 3343–3364. [Google Scholar] [CrossRef]
- Vastaranta, M.; Wulder, M.A.; White, J.C.; Pekkarinen, A.; Tuominen, S.; Ginzler, C.; Kankare, V.; Holopainen, M.; Hyyppä, J.; Hyyppä, H. Airborne laser scanning and digital stereo imagery measures of forest structure: Comparative results and implications to forest mapping and inventory update. Can. J. Remote Sens. 2013, 39, 382–395. [Google Scholar] [CrossRef]
- Næsset, E. Predicting forest stand characteristics with airborne scanning laser using a practical two-stage procedure and field data. Remote Sens. Environ. 2002, 80, 88–99. [Google Scholar] [CrossRef]
- St-Onge, B.; Audet, F.-A.; Bégin, J. Characterizing the height structure and composition of a boreal forest using an individual tree crown approach applied to photogrammetric point clouds. Forests 2015, 6, 3899–3922. [Google Scholar] [CrossRef]
- Rahlf, J.; Breidenbach, J.; Solberg, S.; Astrup, R. Forest parameter prediction using an image-based point cloud: A comparison of semi-itc with ABA. Forests 2015, 6, 4059–4071. [Google Scholar] [CrossRef]
- Tompalski, P.; Wezyk, P.; Weidenbach, M. A comparison of lidar and image-derived canopy height models for individual tree crown segmentation with object based image analysis. In Proceedings of the 5th Geobia Object-Based Image Analysis Conference in South-Eastern European Journal of Earth Observation and Geomatics, Thessaloniki, Greece, 21–24 May 2014.
- Holmgren, J.; Persson, Å.; Söderman, U. Species identification of individual trees by combining high resolution lidar data with multi-spectral images. Int. J. Remote Sens. 2008, 29, 1537–1552. [Google Scholar] [CrossRef]
- Laasasenaho, J. Taper Curve and Volume Functions for Pine, Spruce and Birch [Pinus Sylvestris, Picea Abies, Betula Pendula, Betula Pubescens]; Communicationes Instituti Forestalis Fenniae: Helsinki, Finland, 1982. [Google Scholar]
- Hyyppä, J.; Kelle, O.; Lehikoinen, M.; Inkinen, M. A segmentation-based method to retrieve stem volume estimates from 3-D tree height models produced by laser scanners. IEEE Trans. Geosci. Remote Sens. 2001, 39, 969–975. [Google Scholar] [CrossRef]
- Vauhkonen, J.; Packalen, P.; Malinen, J.; Pitkänen, J.; Maltamo, M. Airborne laser scanning-based decision support for wood procurement planning. Scand. J. For. Res. 2014, 29, 132–143. [Google Scholar] [CrossRef]
- Saarinen, N.; Vastaranta, M.; Kankare, V.; Tanhuanpää, T.; Holopainen, M.; Hyyppä, J.; Hyyppä, H. Urban-tree-attribute update using multisource single-tree inventory. Forests 2014, 5, 1032–1052. [Google Scholar] [CrossRef]
- Kankare, V.; Liang, X.; Vastaranta, M.; Yu, X.; Holopainen, M.; Hyyppä, J. Diameter distribution estimation with laser scanning based multisource single tree inventory. ISPRS J. Photogramm. Remote Sens. 2015, 108, 161–171. [Google Scholar] [CrossRef]
- Packalén, P.; Maltamo, M. Estimation of species-specific diameter distributions using airborne laser scanning and aerial photographs. Can. J. For. Res. 2008, 38, 1750–1760. [Google Scholar] [CrossRef]
- Reynolds, M.R.; Burk, T.E.; Huang, W.-C. Goodness-of-fit tests and model selection procedures for diameter distribution models. For. Sci. 1988, 34, 373–399. [Google Scholar]
- Persson, A.; Holmgren, J.; Söderman, U. Detecting and measuring individual trees using an airborne laser scanner. Photogramm. Eng. Remote Sens. 2002, 68, 925–932. [Google Scholar]
- Kraus, K.; Waldhäusl, P. Photogrammetry Fundamentals and Standard Processes; Dümmmler Verlag: Bonn, Germany, 1993. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Subgroup | Group Description | n |
|---|---|---|
| Pine | Plots with pine representing over 70% of the basal area | 12 |
| Spruce | Plots with spruce representing over 70% of the basal area | 15 |
| Deciduous | Plots with deciduous trees representing over 40% of the basal area | 3 |
| Mixed | Mixed plots with none of the species representing over 70% of the basal area | 12 |
| Total | All plots | 39 |
| Minimum | Maximum | Mean | Standard Deviation | ||
|---|---|---|---|---|---|
| Pine | Mean height (m) | 21.4 | 32.1 | 25.8 | 3.6 |
| Mean DBH (cm) | 26.3 | 46.4 | 30.8 | 6.0 | |
| Basal area (m2/ha) | 17.3 | 40.3 | 26.7 | 7.1 | |
| Volume (m3/ha) | 164.5 | 518.4 | 300.0 | 109.4 | |
| Plot density (trees/ha) | 391 | 1035 | 565 | 201 | |
| Spruce | Mean height (m) | 25.4 | 33.4 | 29.2 | 2.6 |
| Mean DBH (cm) | 26.0 | 42.1 | 33.9 | 5.4 | |
| Basal area (m2/ha) | 22.1 | 38.9 | 32.8 | 5.1 | |
| Volume (m3/ha) | 242.6 | 484.9 | 390.8 | 75.0 | |
| Plot density (trees/ha) | 342 | 879 | 585 | 159 | |
| Deciduous | Mean height (m) | 23.1 | 31.6 | 27.1 | 4.3 |
| Mean DBH (cm) | 26.6 | 32.9 | 28.9 | 3.5 | |
| Basal area (m2/ha) | 25.6 | 39.6 | 31.9 | 7.1 | |
| Volume (m3/ha) | 257.9 | 369.2 | 305.2 | 57.5 | |
| Plot density (trees/ha) | 547 | 2217 | 1218 | 882 | |
| Mixed | Mean height (m) | 23.1 | 31.6 | 27.4 | 2.7 |
| Mean DBH (cm) | 26.6 | 41.6 | 33.4 | 5.0 | |
| Basal area (m2/ha) | 15.2 | 43.2 | 33.1 | 8.0 | |
| Volume (m3/ha) | 177.7 | 508.2 | 349.1 | 96.4 | |
| Plot density (trees/ha) | 342 | 2217 | 909 | 482 | |
| Total | Mean height (m) | 21.4 | 33.4 | 27.6 | 3.2 |
| Mean DBH (cm) | 26.0 | 46.4 | 32.8 | 5.5 | |
| Basal area (m2/ha) | 15.2 | 43.2 | 31.0 | 7.2 | |
| Volume (m3/ha) | 164.5 | 518.4 | 350.0 | 98.4 | |
| Plot density (trees/ha) | 342 | 2217 | 678 | 335 |
| Number of Detected Trees and Detection Rate (in Brackets) | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| Pine | Spruce | Deciduous | Mixed | Total | ||||||
| N | % | N | % | N | % | N | % | N | % | |
| G0.1 | 803 | (173) | 908 | (137) | 143 | (78) | 650 | (117) | 2361 | (140) |
| G0.2 | 697 | (150) | 829 | (125) | 134 | (73) | 585 | (106) | 2111 | (125) |
| G0.3 | 529 | (114) | 592 | (89) | 94 | (51) | 425 | (77) | 1546 | (92) |
| G0.4 | 426 | (92) | 436 | (66) | 71 | (39) | 317 | (57) | 1179 | (70) |
| G0.5 | 349 | (75) | 324 | (49) | 56 | (31) | 264 | (48) | 937 | (56) |
| G0.6 | 288 | (62) | 259 | (39) | 49 | (27) | 221 | (40) | 768 | (46) |
| G0.7 | 241 | (52) | 222 | (33) | 45 | (25) | 183 | (33) | 646 | (38) |
| G0.8 | 193 | (42) | 206 | (31) | 36 | (20) | 160 | (29) | 559 | (33) |
| G0.9 | 180 | (39) | 190 | (29) | 31 | (17) | 139 | (25) | 509 | (30) |
| G1.0 | 163 | (35) | 154 | (23) | 28 | (15) | 126 | (23) | 443 | (26) |
| Filterlow | 453 | (97) | 479 | (72) | 75 | (41) | 354 | (64) | 1286 | (76) |
| Filterhigh | 518 | (111) | 565 | (85) | 93 | (51) | 413 | (75) | 1496 | (89) |
| Filtermean | 428 | (92) | 428 | (64) | 73 | (40) | 345 | (62) | 1201 | (71) |
| Field reference | 465 | 665 | 183 | 554 | 1684 | |||||
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tanhuanpää, T.; Saarinen, N.; Kankare, V.; Nurminen, K.; Vastaranta, M.; Honkavaara, E.; Karjalainen, M.; Yu, X.; Holopainen, M.; Hyyppä, J. Evaluating the Performance of High-Altitude Aerial Image-Based Digital Surface Models in Detecting Individual Tree Crowns in Mature Boreal Forests. Forests 2016, 7, 143. https://doi.org/10.3390/f7070143
Tanhuanpää T, Saarinen N, Kankare V, Nurminen K, Vastaranta M, Honkavaara E, Karjalainen M, Yu X, Holopainen M, Hyyppä J. Evaluating the Performance of High-Altitude Aerial Image-Based Digital Surface Models in Detecting Individual Tree Crowns in Mature Boreal Forests. Forests. 2016; 7(7):143. https://doi.org/10.3390/f7070143
Chicago/Turabian StyleTanhuanpää, Topi, Ninni Saarinen, Ville Kankare, Kimmo Nurminen, Mikko Vastaranta, Eija Honkavaara, Mika Karjalainen, Xiaowei Yu, Markus Holopainen, and Juha Hyyppä. 2016. "Evaluating the Performance of High-Altitude Aerial Image-Based Digital Surface Models in Detecting Individual Tree Crowns in Mature Boreal Forests" Forests 7, no. 7: 143. https://doi.org/10.3390/f7070143