
Research Hotspots and Frontier Prospects in the Field of Agroforestry Picking Robots in China—Cite Space Bibliographic Analysis


Abstract
:1. Introduction
2. Data Processing and Research Methods
2.1. Data Sources and Search Strategies
2.2. Research Methods
3. Visual Results Analysis
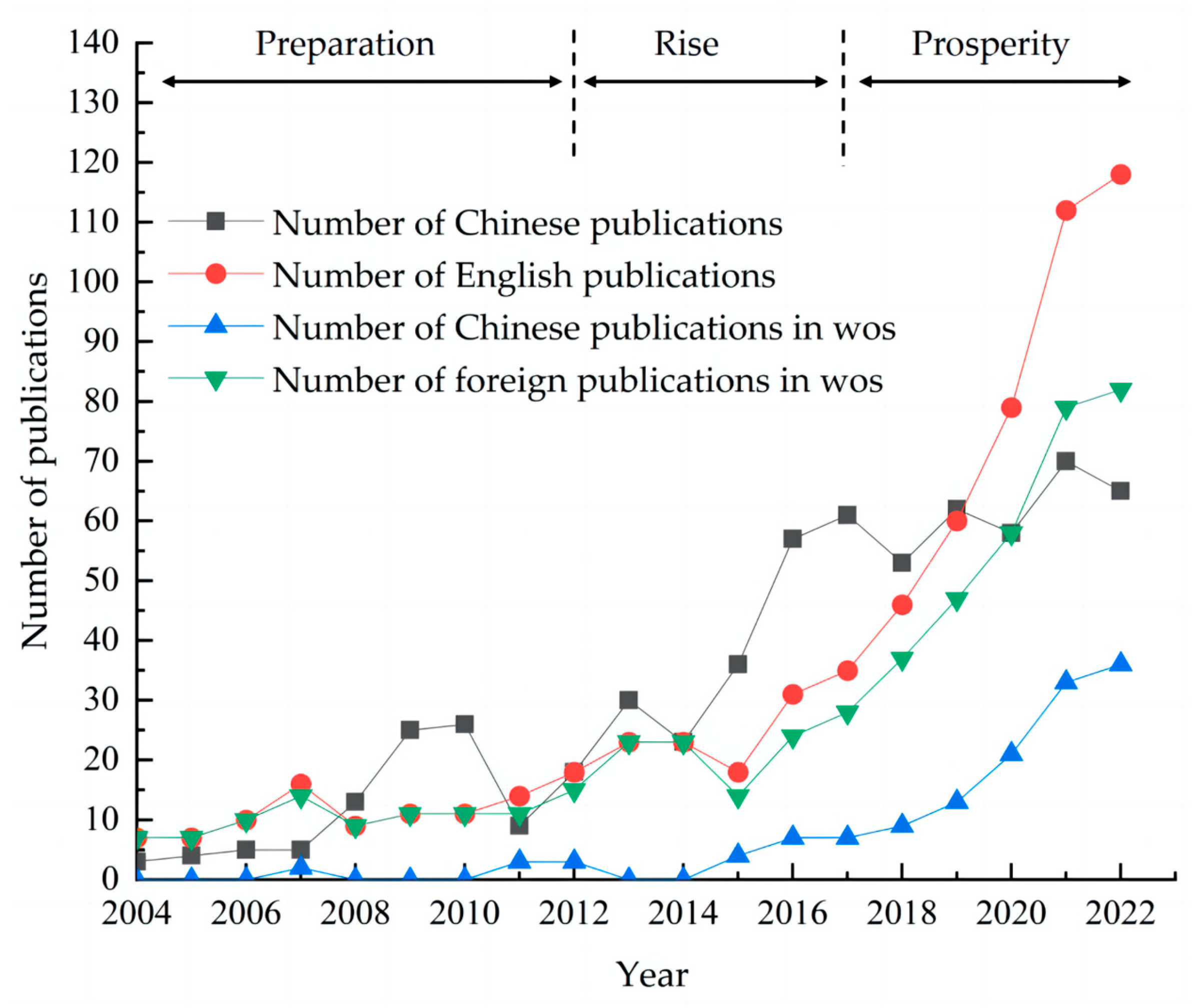
3.1. Analysis of Annual Publication Volume
3.2. Analysis of Country Cooperation Networks
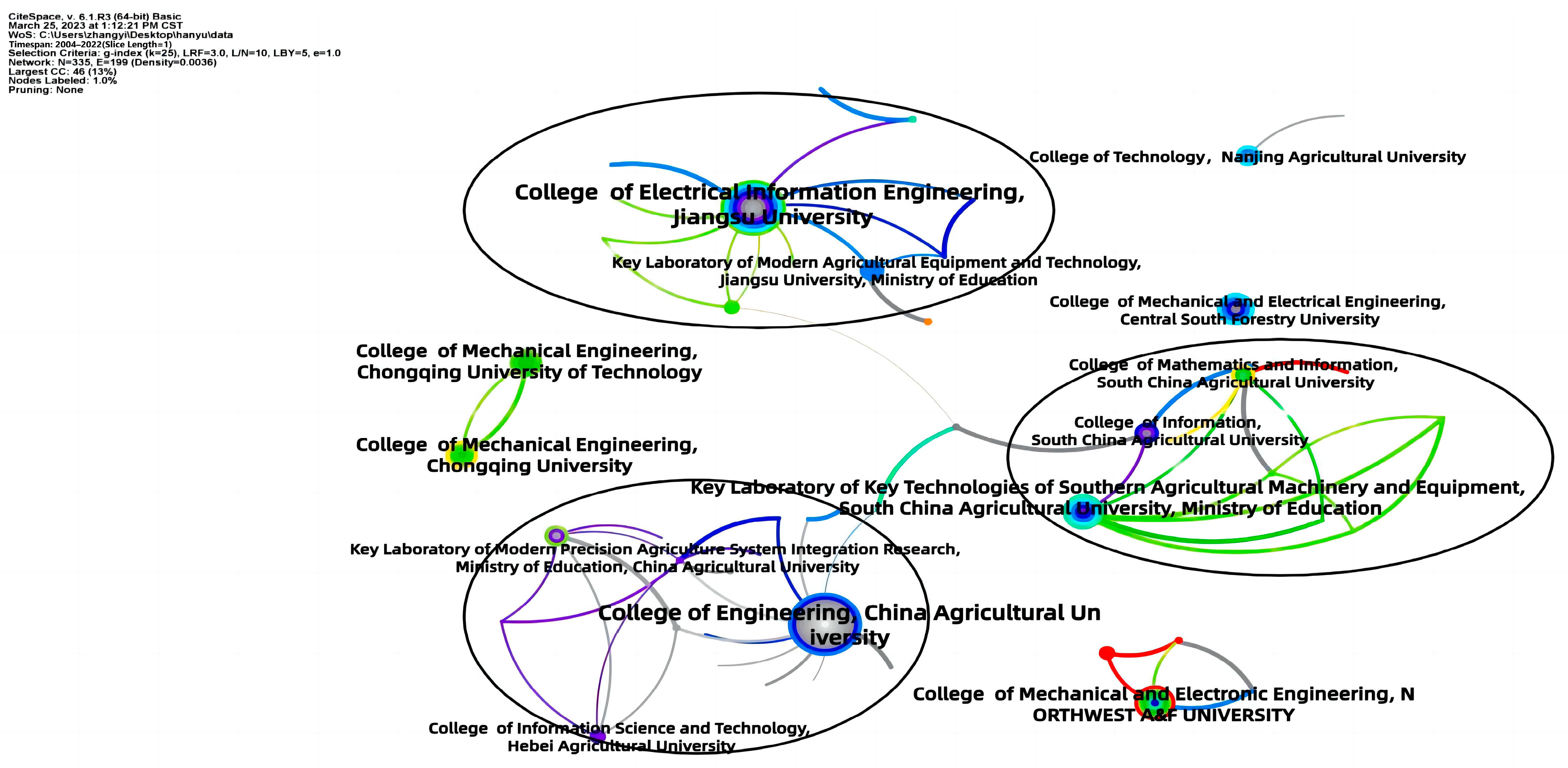
3.3. Analysis of Institutional Cooperation Networks
3.4. Keyword Co-Occurrence Analysis
3.5. Keyword Clustering Analysis
3.6. Keyword Emergent Analysis
4. Research Hot Topics Discussion
4.1. Research on Motion Planning and Control Technology
4.2. Research on Structural Design and Simulation Technology
4.3. Research on Travel Path Planning Technology
4.4. Research on Visual Recognition Technology
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Zipori, I.; Dag, A.; Tugendhaft, Y.; Birger, R. Mechanical harvesting of table olives: Harvest efficiency and fruit quality. HortScience 2014, 49, 55–58. [Google Scholar] [CrossRef]
- Yezekyan, T.; Marinello, F.; Armentano, G.; Trestini, S.; Sartori, L. Modelling of Harvesting Machines’ Technical Parameters and Prices. Agriculture 2020, 10, 194. [Google Scholar] [CrossRef]
- Homayouni, T.; Maharlooei, M.; Toudeshki, A.; Ferguson, L.; Ehsani, R. Simultaneous Trunk and Canopy Shaking Improves Table Olive Harvester Efficiency versus Trunk Shaking Alone. Horticulturae 2023, 9, 640. [Google Scholar] [CrossRef]
- Chen, Y.; Cai, W.; Xiang, H.; Zou, X.; Tan, J.; Lin, G. Mechanical characterization of lychee fruit stalks for robotic harvesting. Trans. Chin. Soc. Agric. Eng. 2012, 28, 53–58. [Google Scholar]
- Dai, W.; Zhang, C.; Yuan, S.; He, Q.; Xu, H. Changes and analysis of cotton quality in Aral Cotton Planting Reclamation Area of Xinjiang. Cotton Text. Technol. 2021, 49, 48–52. (In Chinese) [Google Scholar]
- Wang, M.; Cao, W.; He, Y.; Wang, X.; Zhu, X.; Li, L. Design of mechanical vibration type sea buckthorn harvester. J. Agric. Mech. Res. 2013, 35, 109–111. (In Chinese) [Google Scholar]
- He, Y. Research on remote video monitoring system of picking robot based on embedded ARM. Agric. Mech. Res. 2019, 41, 138–142. (In Chinese) [Google Scholar]
- Schertz, C.E.; Brown, G. Basic considerations in mechanizing citrus harvest. Am. Soc. Agric. Eng. 1968, 11, 343–346. [Google Scholar]
- Tanigaki, K.; Fujiura, T.; Akase, A.; Imagawa, J. Cherry-harvesting robot. Comput. Electron. Agric. 2008, 63, 65–72. [Google Scholar] [CrossRef]
- Zhang, Z.; Igathinathane, C.; Li, J.; Cen, H.; Lu, Y.; Flores, P. Technology progress in mechanical harvest of fresh market apples. Comput. Electron. Agric. 2020, 175, 105606. [Google Scholar] [CrossRef]
- Lehnert, C.; McCool, C.; Sa, I.; Perez, T. Performance improvements of a sweet pepper harvesting robot in protected cropping environments. J. Field Rob. 2020, 37, 1197–1223. [Google Scholar] [CrossRef]
- Roshanianfard, A.; Noguchi, N.; Ardabili, S.; Mako, C.; Mosavi, A. Autonomous Robotic System for Pumpkin Harvesting. Agronomy 2022, 12, 1594. [Google Scholar] [CrossRef]
- Lu, H. Design and testing of a robot for fruit collection from forest trees. Trans. Chin. Soc. Agric. Mach. 2001, 32, 52–54. [Google Scholar]
- Xiong, J.; Ye, M.; Zou, X.; Peng, H.; Lin, G.; Zhu, M. Design and performance analysis of a multi-type fruit picking robot system. Trans. Chin. Soc. Agric. Mach. 2013, 44, 230–235. [Google Scholar]
- Li, T.; Qiu, Q.; Zhao, C.; Xie, F. Task planning for a multi-armed picking robot in dwarf and densely planted orchards. Trans. Chin. Soc. Agric. Eng. 2021, 37, 1–10. [Google Scholar]
- Liu, C.; Gong, L.; Yuan, J.; Li, Y. Research status and development trend of key technologies of agricultural robots. Trans. Chin. Soc. Agric. Mach. 2022, 53, 1–22. [Google Scholar] [CrossRef]
- Madani, F.; Weber, C. The evolution of patent mining: Applying bibliometrics analysis and keyword network analysis. World Pat. Inf. 2016, 46, 32–48. [Google Scholar] [CrossRef]
- Salam, A.; Salam, A. Internet of things for sustainable forestry. In Internet of Things for Sustainable Community Development: Wireless Communications, Sensing, and Systems; Springer: Berlin/Heidelberg, Germany, 2020; pp. 147–181. [Google Scholar]
- Da Silva, D.Q.; dos Santos, F.N.; Filipe, V.; Sousa, A.J.; Oliveira, P.M. Edge AI-Based Tree Trunk Detection for Forestry Monitoring Robotics. Robotics 2022, 11, 136. [Google Scholar] [CrossRef]
- Picchio, R.; Proto, A.R.; Civitarese, V.; di Marzio, N.; Latterini, F. Recent contributions of some fields of the electronics in development of forest operations technologies. Electronics 2019, 8, 1465. [Google Scholar] [CrossRef]
- Wang, Y.; Lai, N.; Zuo, J.; Chen, G.; Du, H. Characteristics and trends of research on waste-to-energy incineration: A bibliometric analysis, 1999–2015. Renew. Sustain. Energy Rev. 2016, 66, 95–104. [Google Scholar] [CrossRef]
- Chen, H.; Jiang, W.; Yang, Y.; Yang, Y.; Man, X. State of the art on food waste research: A bibliometrics study from 1997 to 2014. J. Clean. Prod. 2017, 140, 840–846. [Google Scholar] [CrossRef]
- Vošner, H.B.; Kokol, P.; Bobek, S.; Železnik, D.; Završnik, J. A bibliometric retrospective of the Journal Computers in Human Behavior (1991–2015). Comput. Hum. Behav. 2016, 65, 46–58. [Google Scholar] [CrossRef]
- Chen, Y.; Chen, C.; Liu, Z.; Hu, Z.; Wang, X. Methodological Functions of Cite Space Knowledge Graph. Stud. Sci. Sci. 2015, 33, 242–253. (In Chinese) [Google Scholar]
- Hou, J.; Hu, Z. Review and Prospect of Cite Space Software Application Research. J. Mod. Inf. 2013, 33, 99–103. (In Chinese) [Google Scholar]
- Chen, C.; Ibekwe-SanJuan, F.; Hou, J. The structure and dynamics of cocitation clusters: A multiple-perspective cocitation analysis. J. Am. Soc. Inf. Sci. Technol. 2010, 61, 1386–1409. [Google Scholar] [CrossRef]
- Hu, X. A review of research on digital literacy education in libraries in China. Lib. Work Study 2022, 316, 49–55. (In Chinese) [Google Scholar]
- Huang, C.; Yang, G.; Liu, Y.; Bai, Y.; Zhang, J. Bibliometric analysis of randomized, double-blind, controlled clinical trials of traditional Chinese medicine compound prescriptions in the past 20 years. Mod. Tradit. Chin. Med. Mater. Med. World Sci. Technol. 2022, 24, 4994–5005. (In Chinese) [Google Scholar]
- Sun, W.; Mao, L. Evolution of Beijing-Tianjin-Hebei collaborative development research based on Cite Space method. Acta Geogr. Sin. 2018, 73, 2378–2391. (In Chinese) [Google Scholar]
- Wang, J.; Cai, Y.; Yang, J.; Zhao, X. Research trends and frontiers on source appointment of soil heavy metal: A scientometric review (2000–2020). Environ. Sci. Pollut. Res. 2021, 28, 52764–52779. [Google Scholar] [CrossRef]
- Wei, B.; Hu, X.; Zhu, M.; Peng, L.; Xu, K. Research hotspots and trends of China’s green ecological network based on Cite Space. Econ. Geogr. 2021, 41, 174–183. (In Chinese) [Google Scholar]
- Dai, M.; Wang, G.; Gao, Y. Visualization study of modern agricultural products circulation development based on Cite Space. Price Theory Pract. 2022, 459, 110–113. (In Chinese) [Google Scholar]
- Gao, W.; Qiu, Q.; Yuan, C.; Shen, X.; Cao, F.; Wang, G.; Wang, G. Forestry big data: A review and bibliometric analysis. Forests 2022, 13, 1549. [Google Scholar] [CrossRef]
- Chen, C. Cite Space II: Detecting and visualizing emerging trends and transient patterns in scientific literature. J. Am. Soc. Inf. Sci. Technol. 2006, 57, 359–377. [Google Scholar] [CrossRef]
- Chen, C. Science mapping: A systematic review of the literature. J. Data Inf. Sci. 2017, 2, 1–40. [Google Scholar] [CrossRef]
- Yue, X.; Yuan, J.; Gao, J.; Zhai, L.; Pan, Y. Comparison of examples of commonly used scientific knowledge mapping tools. Digit. Libr. Forum 2014, 120, 66–72. (In Chinese) [Google Scholar]
- Xiao, M.; Qiu, X.; Huang, J.; Li, G.; Feng, Z. A comparative study of knowledge mapping tools. Lib. J. 2013, 32, 61–69. (In Chinese) [Google Scholar]
- Xue, N. Bibliometric analysis of the status and trend of livestock and poultry pollution control. J. Agro-Environ. Sci. 2014, 33, 429–434. (In Chinese) [Google Scholar]
- Guan, W.; Ling, W. Bibliometric-based knowledge mapping analysis of digital twin research visualization. Comput. Integr. Manuf. Syst. 2020, 26, 18–27. [Google Scholar]
- Huang, H.; He, L. Knowledge mapping analysis of retired lithium battery recycling. Chin. J. Nonferrous Met. 2021, 31, 1965–1978. [Google Scholar]
- Wang, C.; Wu, S.; Jiang, L.; Xu, W.; Yang, Y.; Hu, J. Comprehensive analysis of TCM diagnosis and treatment schemes for COVID-19 in all regions of China. Mod. Tradit. Chin. Med. Mater. Med. World Sci. Technol. 2020, 22, 257–263. [Google Scholar]
- Dun, S.; Chen, Q.; Wang, L. Review and Prospect of Research on Innovation and Entrepreneurship Education in China—A Knowledge Mapping Analysis Based on Cite Space. Sci. Manag. Res. 2021, 39, 2–9. (In Chinese) [Google Scholar]
- Chen, D.; Wu, Y.; Li, H.; Wang, M.; Zhou, Y.; Zhu, Z.; Liu, Y.; Pan, X.; Zhou, J.; He, F. Visual mapping analysis of literature on Chinese and Western medicine for spastic cerebral palsy based on Cite Space bibliometrics. Chin. Tradit. Herb. Drugs 2021, 52, 4318–4326. (In Chinese) [Google Scholar]
- Yang, J.; Kang, S.; Su, X.; Lin, N.; Kong, X. Cite Space-based visualization and analysis of the research progress of Yam bean root. China J. Chin. Mater. Med. 2021, 46, 1763–1768. (In Chinese) [Google Scholar]
- Zhang, X.; Zhao, J.; Dong, Z. Research on combined BDS/INS navigation algorithm for agricultural machines. J. Chin. Agric. Mech. 2021, 42, 171–177. (In Chinese) [Google Scholar]
- Yang, Y.; Wen, X.; Ma, Q.; Zhang, G.; Cheng, S.; Qi, J.; Chen, Z.; Chen, L. Real-time planning of obstacle avoidance paths for agricultural machines in dynamic recognition area based on Bessel curves. Trans. Chin. Soc. Agric. Eng. 2022, 38, 34–43. [Google Scholar]
- Dong, H.; Yang, L.; Li, J.; Sun, H.; Yao, L. Flexible Design of the Connecting Plate in Pneumatic Soft Manipulators. Appl. Sci. 2022, 12, 7224. [Google Scholar] [CrossRef]
- Tian, G.; Zhou, J.; Gu, B. Slipping detection and control in gripping fruits and vegetables for agricultural robot. Int. J. Agric. Biol. Eng. 2018, 11, 45–51. [Google Scholar] [CrossRef]
- Kultongkham, A.; Kumnon, S.; Thintawornkul, T.; Chanthasopeephan, T. The design of a force feedback soft gripper for tomato harvesting. J. Agric. Eng. 2021, 52. [Google Scholar] [CrossRef]
- Zheng, T.; Jiang, M.; Li, Y.; Feng, M. Research on tomato detection in natural environment based on RC-YOLOv4. Comput. Electron. Agric. 2022, 198, 107029. [Google Scholar] [CrossRef]
- Liu, S.; Fan, C.; Li, G.; Gao, Y.; Zhang, Y.; Yang, Q. Strawberry recognition method based on convolutional neural network. Trans. Chin. Soc. Agric. Mach. 2020, 51, 237–244. [Google Scholar]
- Fan, X.; Xu, Y.; Zhou, J.; Liu, X.; Tang, J.; Wei, Y. Detection of in-situ green walnut based on improved convolutional neural network. Trans. Chin. Soc. Agric. Mach. 2021, 52, 149–155. [Google Scholar] [CrossRef]
- Tu, S.; Pang, J.; Liu, H.; Zhuang, N.; Chen, Y.; Zheng, C.; Wan, H.; Xue, Y. Passion fruit detection and counting based on multiple scale faster R-CNN using RGB-D images. Precis. Agric. 2020, 21, 1072–1091. [Google Scholar] [CrossRef]
- Wang, D.; He, D. Recognition of apple targets before robotic fruit thinning based on R-FCN deep convolutional neural network. Trans. Chin. Soc. Agric. Eng. 2019, 35, 156–163. [Google Scholar]
- Li, G.; Ji, C.; Gu, B.; Xu, W.; Dong, M. Kinematics analysis and experiment of apple harvesting robot manipulator with multiple end-effectors. Trans. Chin. Soc. Agric. Mach. 2016, 12, 47. [Google Scholar]
- Liang, X.; Zhou, T.; Wang, B. Design and test of joint sliding mode control system for fruit harvesting robot. Trans. Chin. Soc. Agric. Mach. 2016, 47, 1–7. [Google Scholar]
- Su, H. Application of fuzzy control in control optimization of picking robot. J. Agric. Mech. Res. 2021, 43, 196–200. (In Chinese) [Google Scholar]
- Dimeas, F.; Sako, D.V.; Moulianitis, V.C.; Aspragathos, N.A. Design and fuzzy control of a robotic gripper for efficient strawberry harvesting. Robotica 2015, 33, 1085–1098. [Google Scholar] [CrossRef]
- Liu, A.; Zhao, H.; Song, T.; Liu, Z.; Wang, H.; Sun, D. Adaptive control of manipulator based on neural network. Neural Comput. Appl. 2021, 33, 4077–4085. [Google Scholar] [CrossRef]
- Chen, W.; Xu, T.; Liu, J.; Wang, M.; Zhao, D. Picking robot visual servo control based on modified fuzzy neural network sliding mode algorithms. Electronics 2019, 8, 605. [Google Scholar] [CrossRef]
- Liu, C.; Feng, Q.; Tang, Z.; Wang, X.; Geng, J.; Xu, L. Motion Planning of the Citrus-Picking Manipulator Based on the TO-RRT Algorithm. Agriculture 2022, 12, 581. [Google Scholar] [CrossRef]
- Chen, Q.; Yin, C.; Guo, Z.; Wang, J.; Zhou, H.; Jiang, X. Current status and development trend of apple picking robotics. Trans. Chin. Soc. Agric. Eng. 2023, 39, 1–15. [Google Scholar]
- Pi, J.; Liu, J.; Zhou, K.; Qian, M. An Octopus-Inspired Bionic Flexible Gripper for Apple Grasping. Agriculture 2021, 11, 1014. [Google Scholar] [CrossRef]
- Lin, G.; Huang, P.; Wang, M.; Xu, Y.; Zhang, R.; Zhu, L. An Inverse Kinematics Solution for a Series-Parallel Hybrid Banana-Harvesting Robot Based on Deep Reinforcement Learning. Agronomy 2022, 12, 2157. [Google Scholar] [CrossRef]
- Guo, H.; Luo, D.; Gao, G.; Wu, T.; Diao, H. Design and experiment of a safflower picking robot based on a parallel manipulator. Eng. Agric. 2022, 42, e20210129. [Google Scholar] [CrossRef]
- Zhang, F.; Chen, Z.; Wang, Y.; Bao, R.; Chen, X.; Fu, S.; Tian, M.; Zhang, Y. Research on flexible end-effectors with humanoid grasp function for small spherical fruit picking. Agriculture 2023, 13, 123. [Google Scholar] [CrossRef]
- Guo, T.; Zheng, Y.; Bo, W.; Liu, J.; Pi, J.; Chen, W.; Deng, J. Research on the bionic flexible end-effector based on tomato harvesting. J. Sens. 2022, 2022, 2564952. [Google Scholar] [CrossRef]
- Wang, F.; Fan, C.; Li, Z.; Zhang, S.; Xia, P. Analysis of current status and development trend of robot application in facility agriculture. Chin. J. Agric. Mech. Chem. 2020, 41, 93. (In Chinese) [Google Scholar]
- Liu, G.; Kang, X.; Xia, Y.; Jing, Y. GNSS-based global path planning method and experiment for farmland leveling. Trans. Chin. Soc. Agric. Mach. 2018, 49, 27–33. [Google Scholar]
- Pak, J.; Kim, J.; Park, Y.; Son, H. Field evaluation of path-planning algorithms for autonomous mobile robot in smart farms. IEEE Access 2022, 10, 60253–60266. [Google Scholar] [CrossRef]
- Jing, Y.; Jin, Z.; Liu, G. A three-dimensional path planning method based on improved ant colony algorithm for farmland leveling navigation. Trans. Chin. Soc. Agric. Mach. 2020, 51, 333–339. [Google Scholar]
- Wang, Y.; Tian, Y.; Li, X.; Li, L. Adaptive dynamic window method for traversing dense obstacles. Control Decis. 2019, 34, 927–936. [Google Scholar]
- Zhang, M.; Ji, Y.; Li, S.; Cao, R.; Xu, H.; Zhang, Z. Progress of agricultural machinery navigation technology. Trans. Chin. Soc. Agric. Mach. 2020, 51, 1–18. [Google Scholar]
- Cui, Y.; Wang, Y.; He, Z.; Cao, D.; Ma, L.; Li, K. Global path planning for kiwifruit picking robot based on improved RRT algorithm. Trans. Chin. Soc. Agric. Mach. 2022, 53, 151–158. [Google Scholar]
- Wang, Y.; Wang, W.; Xu, F.; Wang, J.; Chen, H. Path planning method for plant protection UAV based on improved ant colony algorithm. Trans. Chin. Soc. Agric. Mach. 2020, 51, 103–112. [Google Scholar] [CrossRef]
- Song, Q.; Li, S.; Yang, J.; Bai, Q.; Hu, J.; Zhang, X.; Zhang, A. Intelligent optimization algorithm-based path planning for a mobile robot. Comput. Intell. Neurosci. 2021, 2021, 8025730. [Google Scholar] [CrossRef]
- Wang, Y.; He, Z.; Cao, D.; Ma, L.; Li, K.; Jia, L.; Cui, Y. Coverage path planning for kiwifruit picking robots based on deep reinforcement learning. Comput. Electron. Agric. 2023, 205, 107593. [Google Scholar] [CrossRef]
- Cao, R.; Zhang, Z.; Li, S.; Zhang, M.; Li, H.; Li, M. Multi-machine cooperative global path planning based on improved A~* algorithm and Bezier curve. Trans. Chin. Soc. Agric. Mach. 2021, 52, 548–554. [Google Scholar]
- Bae, H.; Kim, G.; Kim, J.; Qian, D.; Lee, S. Multi-robot path planning method using reinforcement learning. Appl. Sci. 2019, 9, 3057. [Google Scholar] [CrossRef]
- Liu, S.; Chen, Y.; Dai, F.; Ke, Z.; Chen, S. Multi-robot cooperative localization and fusion map building under air-ground orthogonal view. Control Theory Appl. 2018, 35, 1779–1787. (In Chinese) [Google Scholar]
- Wang, C.; Luo, B.; Li, C.; Wang, W.; Yin, L.; Zhao, Q. UAV visual SLAM cooperative mapping and navigation. Acta Geod. Cartogr. Sin. 2020, 49, 767–776. (In Chinese) [Google Scholar]
- Song, H.; Shang, Y.; He, D. Research progress on deep learning recognition technology for fruit targets. Trans. Chin. Soc. Agric. Mach. 2023, 1, 1–19. [Google Scholar]
- Tian, Y.; Yang, G.; Wang, Z.; Li, E.; Liang, Z. Instance segmentation of apple flowers using the improved mask R–CNN model. Biosyst. Eng. 2020, 193, 264–278. [Google Scholar] [CrossRef]
- Lin, G.; Tang, Y.; Zou, X.; Li, J.; Xiong, J. In-field citrus detection and localisation based on RGB-D image analysis. Biosyst. Eng. 2019, 186, 34–44. [Google Scholar] [CrossRef]
- Sun, Y.; Wu, S.; Gong, G. Trends of research on polycyclic aromatic hydrocarbons in food: A 20-year perspective from 1997 to 2017. Trends Food Sci. Technol. 2019, 83, 86–98. [Google Scholar] [CrossRef]
- Zou, Z.; Chen, K.; Shi, Z.; Guo, Y.; Ye, J. Object detection in 20 years: A survey. arXiv 2023, arXiv:1905.05055. [Google Scholar] [CrossRef]
- Zhao, Y.; Rao, Y.; Dong, S.; Zhang, J. A review of deep learning target detection methods. Chin. J. Image Graph. 2020, 25, 629–654. (In Chinese) [Google Scholar]
- Zhou, H.; Wang, X.; Au, W.; Kang, H.; Chen, C. Intelligent robots for fruit harvesting: Recent developments and future challenges. Precis. Agric. 2022, 23, 1856–1907. [Google Scholar] [CrossRef]
- Xiong, Z.; Wu, R.; Huang, J.; Li, B.; Dai, S.; Ai, S. Deep learning combined with fast guided filtering to recognize navel orange fruits in natural environment. Acta Agric. Univ. Jiangxiensis 2022, 44, 736–746. (In Chinese) [Google Scholar]
- Kamilaris, A.; Prenafeta-Boldú, F.X. Deep learning in agriculture: A survey. Comput. Electron. Agric. 2018, 147, 70–90. [Google Scholar] [CrossRef]
- LeCun, Y.; Bengio, Y.; Hinton, G. Deep learning. Nature 2015, 521, 436–444. [Google Scholar] [CrossRef]
- Li, Y.; Feng, Q.; Li, T.; Xie, F.; Liu, C.; Xiong, Z. Advance of target visual information acquisition technology for fresh fruit robotic harvesting: A review. Agronomy 2022, 12, 1336. [Google Scholar] [CrossRef]
- Liu, Y.; Wang, H.; Liu, Y.; Luo, Y.; Li, H.; Chen, H.; Liao, K.; Li, L. A Trunk Detection Method for Camellia oleifera Fruit Harvesting Robot Based on Improved YOLOv7. Forests 2023, 14, 1453. [Google Scholar] [CrossRef]
- Fu, L.; Wu, F.; Zou, X.; Jiang, Y.; Lin, J.; Yang, Z.; Duan, J. Fast detection of banana bunches and stalks in the natural environment based on deep learning. Comput. Electron. Agric. 2022, 194, 106800. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Ranking | Country | Count | Percentage (%) | Centrality |
|---|---|---|---|---|
| 1 | China | 167 | 22.6 | 0.48 |
| 2 | USA | 114 | 15.4 | 0.40 |
| 3 | Japan | 57 | 7.7 | 0.15 |
| 4 | Britain | 47 | 6.4 | 0.61 |
| 5 | Italy | 39 | 5.3 | 0.05 |
| 6 | Germany | 29 | 3.9 | 0.04 |
| 7 | Spain | 21 | 2.8 | 0.04 |
| 8 | Korea | 21 | 2.8 | 0.01 |
| 9 | Canada | 20 | 2.7 | 0.01 |
| 10 | France | 19 | 2.6 | 0.01 |
| 11 | Others | 204 | 27.8 | / |
| Institution | Count | Centrality | Year |
|---|---|---|---|
| College of Engineering, China Agricultural University | 26 | 0.02 | 2004–2012, 2012–2016, 2018 |
| College of Electrical and Information Engineering, Jiangsu University | 26 | 0.01 | 2009–2010, 2012–2016, 2019 |
| College of Mechanical and Electronic Engineering, Northwest A&F University | 17 | 0.00 | 2012, 2014, 2017, 2019, 2022 |
| Key Laboratory of Agricultural Machinery and Equipment in South China, Ministry of Education, South China Agricultural University | 16 | 0.01 | 2011, 2013–2019 |
| Key Laboratory of Modern Fine Agriculture System Integration Research of Ministry of Education, China Agricultural University | 15 | 0.00 | 2008, 2010, 2013–2015, 2017, 2019 |
| College of Mechanical Engineering, Chongqing University of Technology | 15 | 0.00 | 2018–2020 |
| College of Mechanical and Electrical Engineering, Central South University of Forestry and Technology | 15 | 0.00 | 2012–2019, 2022 |
| College of Engineering, Nanjing Agricultural University | 13 | 0.00 | 2007, 2010–2012, 2014–2017 |
| College of Informatics, South China Agricultural University | 10 | 0.01 | 2012–2015 |
| College of Mathematics and Informatics, South China Agricultural University | 8 | 0.00 | 2017–2020, 2022 |
| Institution | Count | Centrality | Year |
|---|---|---|---|
| South China Agricultural University | 18 | 0.10 | 2016, 2018, 2020–2022 |
| Northwest A&F University | 14 | 0.08 | 2015, 2019, 2021 |
| Osaka University | 13 | 0.03 | 2007, 2019–2022 |
| Massachusetts Institute of Technology | 12 | 0.06 | 2010–2012, 2017–2019 |
| Chinese Academy of Sciences | 11 | 0.06 | 2017, 2020–2022 |
| Natl Inst Adv Ind Sci and Technology | 11 | 0.15 | 2007, 2019, 2021–2022 |
| Tokyo University | 11 | 0.10 | 2005, 2007, 2015, 2018 |
| Carnegie Mellon University | 9 | 0.03 | 2005, 2012, 2015, 2017, 2021–2022 |
| Technical University of Munich | 8 | 0.02 | 2011, 2018 |
| Ministry of Agriculture and Rural Affairs | 8 | 0.01 | 2021 |
| Chinese Keywords | Count | Percentage (%) | Year | English Keywords | Count | Percentage (%) | Year |
|---|---|---|---|---|---|---|---|
| Robot | 49 | 6.04 | 2005, 2009, 2011–2022 | Design | 90 | 7.99 | 2005, 2007, 2010–2022 |
| Machine vision | 44 | 5.43 | 2005–2012, 2014, 2016–2019, 2021 | System | 60 | 5.33 | 2007, 2012–2022 |
| Image processing | 35 | 4.32 | 2010, 2012–2022 | Robot | 54 | 4.80 | 2010, 2012, 2014–2021 |
| Image recognition | 32 | 3.95 | 2009–2010, 2012–2015, 2017–2019, 2021 | Algorithm | 30 | 2.66 | 2008, 2011, 2013–2014, 2016–2022 |
| Image segmentation | 32 | 3.95 | 2004, 2006–2010, 2012–2018, 2020 | Model | 28 | 2.49 | 2005–2006, 2013, 2016, 2018–2022 |
| Path planning | 26 | 3.21 | 2016–2022 | Recognition | 24 | 2.13 | 2012, 2016–2017, 2019–2022 |
| Apple | 20 | 2.47 | 2010–2011, 2013, 2015, 2018–2019 | Optimization | 24 | 2.13 | 2009, 2012, 2016, 2018–2020, 2022 |
| Tomato | 17 | 2.10 | 2008, 2012, 2016–2017, 2019, 2021 | Task analysis | 22 | 1.95 | 2016, 2018, 2021–2022 |
| Simulation | 16 | 1.97 | 2008–2011, 2013, 2015–2016, 2018, 2022 | Manipulator | 20 | 1.78 | 2004, 2006, 2008, 2012–2013, 2015, 2017, 2019, 2021–2022 |
| Mechanical arm | 15 | 1.85 | 2013, 2016–2017, 2020, 2022 | Motion | 20 | 1.78 | 2005, 2012–2013, 2018, 2020–2022 |
| Others | 525 | 35.27 | / | Others | 754 | 33.04 | / |
| Research Direction | Included Clustering |
|---|---|
| Picking target detection | #0 recognition, #1 image segmentation, #2 robot, #3 machine vision, #7 neural network, #8 Apple, #0 deep learning |
| Motion planning control | #5Path planning, #7 neural network, #0 deep learning, #2 fuzzy sliding mode control, #4 manipulation planning, #6 robot control |
| Structural design simulation | #4Simulation, #6manipulator, #7 neural network, #0 deep learning, #1parallel robot, #3 end effectors |
| Walking path planning | #3 machine vision, #5Path planning, #7 neural network, #0 deep learning, #5 mobile robot |
| Keywords | Strength | Begin | End | 2004–2022 |
|---|---|---|---|---|
| Image segmentation | 2.66 | 2004 | 2007 | ▃▃▃▃▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂ |
| Apple | 5.99 | 2010 | 2013 | ▂▂▂▂▂▂▃▃▃▃▂▂▂▂▂▂▂▂▂ |
| Identification | 3.19 | 2014 | 2015 | ▂▂▂▂▂▂▂▂▂▂▃▃▂▂▂▂▂▂▂ |
| Algorithm | 4.74 | 2015 | 2017 | ▂▂▂▂▂▂▂▂▂▂▂▃▃▃▂▂▂▂▂ |
| Positioning | 3.33 | 2015 | 2016 | ▂▂▂▂▂▂▂▂▂▂▂▃▃▂▂▂▂▂▂ |
| Grape | 2.89 | 2015 | 2017 | ▂▂▂▂▂▂▂▂▂▂▂▃▃▃▂▂▂▂▂ |
| Path planning | 3.2 | 2016 | 2022 | ▂▂▂▂▂▂▂▂▂▂▂▂▃▃▃▃▃▃▃ |
| Deep learning | 3.99 | 2019 | 2022 | ▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▃▃▃▃ |
| Obstacle avoidance | 3.18 | 2019 | 2020 | ▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▃▃▂▂ |
| Positioning and navigation | 3.18 | 2020 | 2022 | ▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▃▃▃ |
| Keywords | Strength | Begin | End | 2004–2022 |
|---|---|---|---|---|
| Iterative learning control | 2.38 | 2007 | 2011 | ▂▂▂▃▃▃▃▃▂▂▂▂▂▂▂▂▂▂▂ |
| Autonomous robot | 2.12 | 2007 | 2013 | ▂▂▂▃▃▃▃▃▃▃▂▂▂▂▂▂▂▂▂ |
| System | 4.29 | 2012 | 2017 | ▂▂▂▂▂▂▂▂▃▃▃▃▃▃▂▂▂▂▂ |
| Robot manipulator | 2.39 | 2012 | 2013 | ▂▂▂▂▂▂▂▂▃▃▂▂▂▂▂▂▂▂▂ |
| Parallel robot | 2.39 | 2015 | 2017 | ▂▂▂▂▂▂▂▂▂▂▂▃▃▃▂▂▂▂▂ |
| design | 3.06 | 2016 | 2018 | ▂▂▂▂▂▂▂▂▂▂▂▂▃▃▃▂▂▂▂ |
| Recognition | 2.57 | 2016 | 2017 | ▂▂▂▂▂▂▂▂▂▂▂▂▃▃▂▂▂▂▂ |
| Performance | 2.76 | 2019 | 2022 | ▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▃▃▃▃ |
| Soft robotics | 2.7 | 2019 | 2020 | ▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▃▃▂▂ |
| Deep learning | 3.85 | 2020 | 2022 | ▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▃▃▃ |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jia, N.; Zhang, H.; Gao, H.; Liu, J. Research Hotspots and Frontier Prospects in the Field of Agroforestry Picking Robots in China—Cite Space Bibliographic Analysis. Forests 2023, 14, 1874. https://doi.org/10.3390/f14091874
Jia N, Zhang H, Gao H, Liu J. Research Hotspots and Frontier Prospects in the Field of Agroforestry Picking Robots in China—Cite Space Bibliographic Analysis. Forests. 2023; 14(9):1874. https://doi.org/10.3390/f14091874
Chicago/Turabian StyleJia, Na, Hangyu Zhang, Haoshu Gao, and Jiuqing Liu. 2023. "Research Hotspots and Frontier Prospects in the Field of Agroforestry Picking Robots in China—Cite Space Bibliographic Analysis" Forests 14, no. 9: 1874. https://doi.org/10.3390/f14091874