
Investigation of Recognition and Classification of Forest Fires Based on Fusion Color and Textural Features of Images
Abstract
:1. Introduction
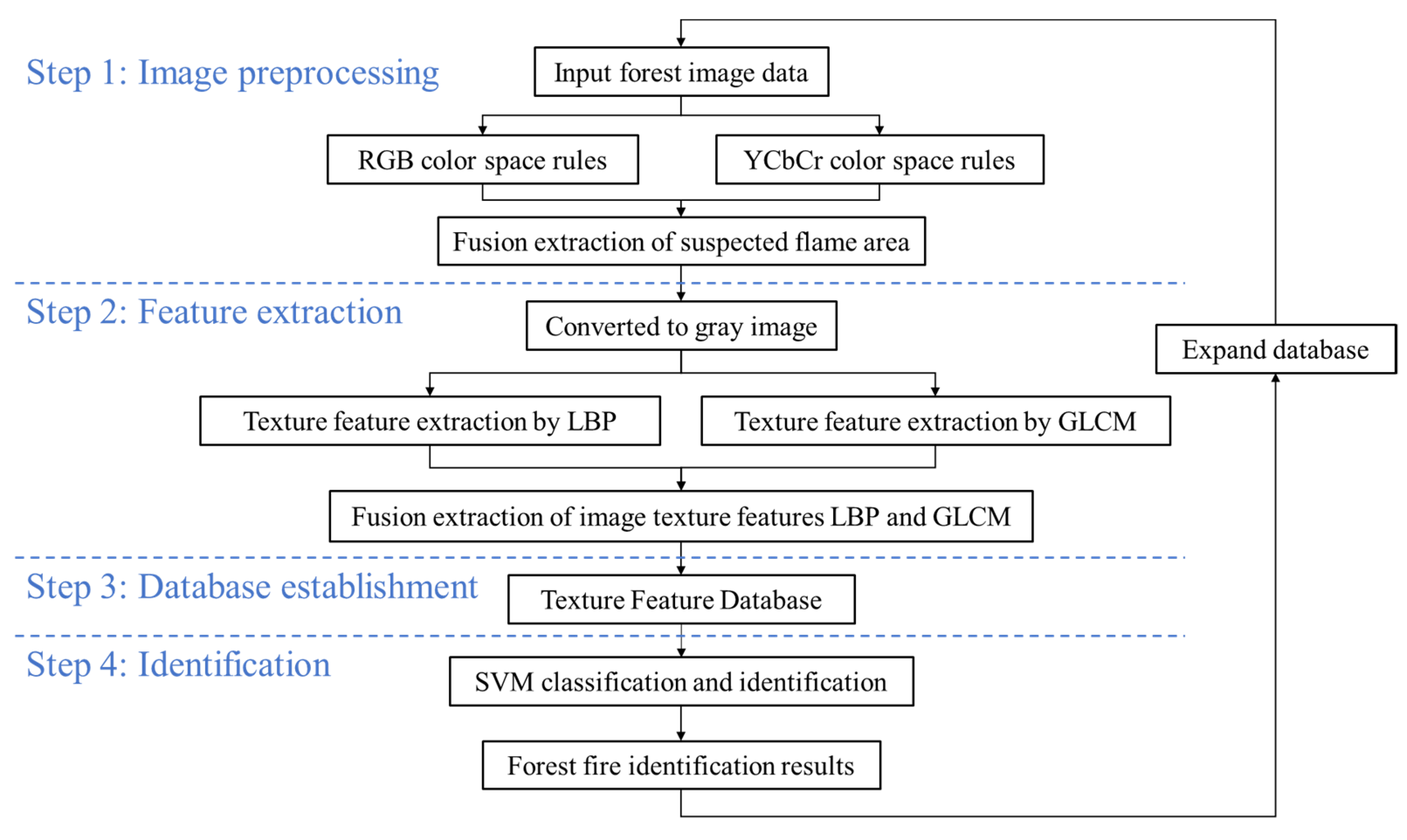
2. Method
2.1. Segment of Suspected Flame Region
2.1.1. Segment via RGB Color Space
2.1.2. Segment via YCbCr Color Space
2.1.3. Segment via Fusion RGB-YCbCr Color Spaces
2.2. Extraction of Textural Features
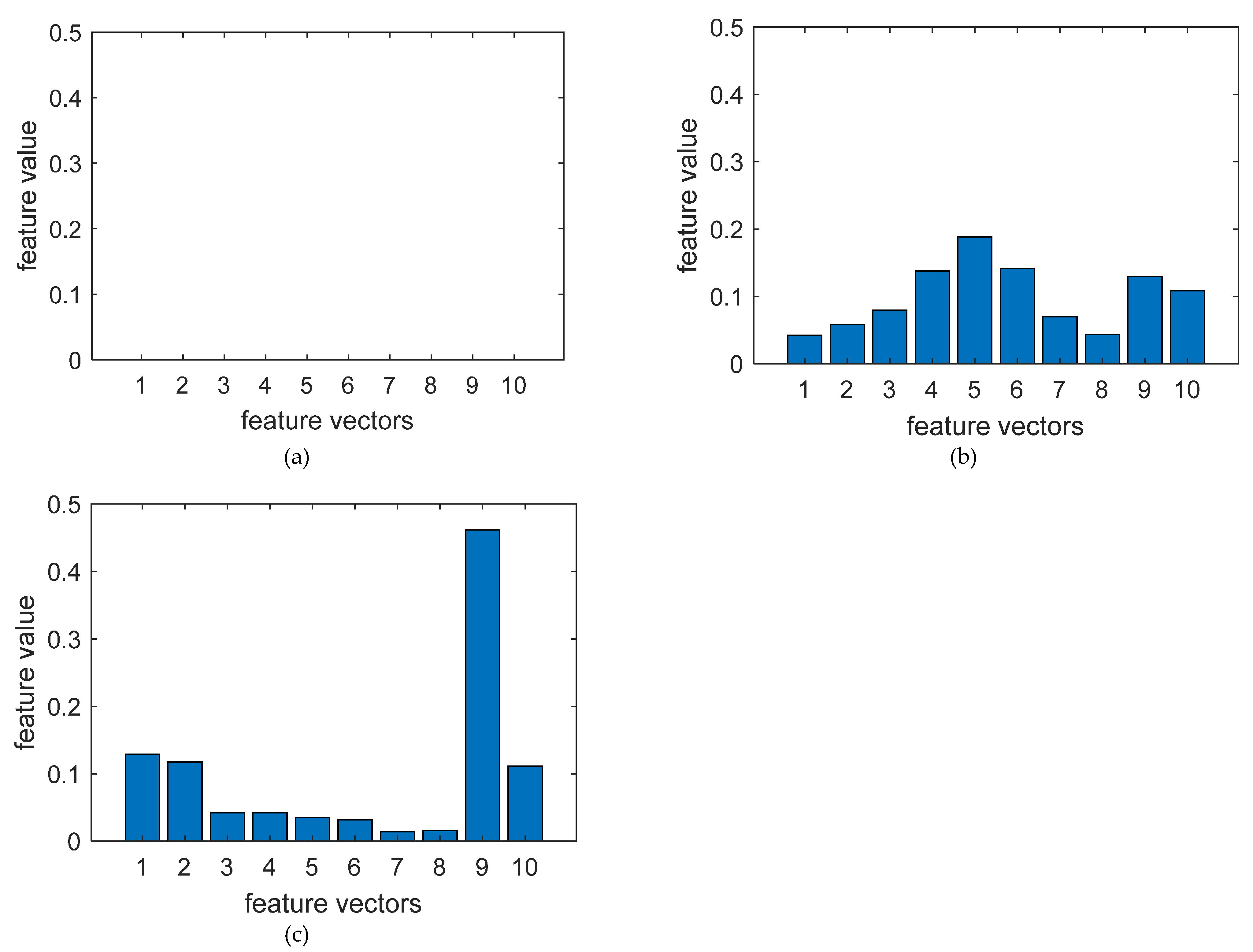
2.2.1. Extraction of Textural Features via LBP
2.2.2. Extraction of Textural Features via GLCM
2.3. Classifier
- (1)
- Training process: The target image is extracted as the training set, based on the LBP histogram feature of the target image and the GLCM texture extraction feature as the image feature input to the SVM vector machine for classifier training.
- (2)
- Recognition process: The LBP and GLCM features of the recognition image are extracted and classified by the trained classifier. Finally, the classification performance of the classifier is evaluated by the accurate recognition results.
3. Results and Discussion
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Samui, P.; Roy, S.S.; Balas, V.E. (Eds.) Handbook of Neural Computation; Academic Press: Cambridge, MA, USA, 2017. [Google Scholar]
- Balas, V.E.; Roy, S.S.; Sharma, D.; Samui, P. (Eds.) Handbook of Deep Learning Applications; Springer: New York, NY, USA, 2019; Volume 136. [Google Scholar]
- Wu, H.; Zhang, A.; Han, Y.; Nan, J.; Li, K. Fast stochastic configuration network based on an improved sparrow search algorithm for fire flame recognition. Knowl.-Based Syst. 2022, 245, 108626. [Google Scholar] [CrossRef]
- Wen, Z.; Xie, L.; Feng, H.; Tan, Y. Robust fusion algorithm based on RBF neural network with TS fuzzy model and its application to infrared flame detection problem. Appl. Soft Comput. J. 2019, 76, 251–264. [Google Scholar] [CrossRef]
- Roy, S.S.; Goti, V.; Sood, A.; Roy, H.; Gavrila, T.; Floroian, D.; Mohammadi-Ivatloo, B. L2 regularized deep convolutional neural networks for fire detection. J. Intell. Fuzzy Syst. 2014, 43, 1–12. [Google Scholar] [CrossRef]
- Chen, H.; Yan, T.; Zhang, X. Burning condition recognition of rotary kiln based on spatiotemporal features of flame video. Energy 2020, 211, 118656. [Google Scholar] [CrossRef]
- Liu, Z.; Zhang, K.; Wang, C.; Huang, S. Research on the identification method for the forest fire based on deep learning. Optik 2020, 223, 165491. [Google Scholar] [CrossRef]
- Zhang, R.; Lu, S.; Yu, H.; Wang, X. Recognition method of cement rotary kiln burning state based on Otsu-Kmeans flame image segmentation and SVM. Optik 2021, 243, 167418. [Google Scholar] [CrossRef]
- Hosseini, A.; Hashemzadeh, M.; Farajzadeh, N. UFS-Net: A unified flame and smoke detection method for early detection of fire in video surveillance applications using CNNs. J. Comput. Sci. 2022, 61, 101638. [Google Scholar] [CrossRef]
- Wang, Y.; Dang, L.; Ren, J. Forest fire image recognition based on convolutional neural network. J. Algorithms Comput. Technol. 2019, 13, 1748302619887689. [Google Scholar] [CrossRef] [Green Version]
- Jiang, L.; Qi, Q.; Zhang, A.; Guo, C.; Cheng, X. Improving the accuracy of image-based forest fire recognition and spatial positioning. Sci. China Technol. Sci. 2010, 53, 184–190. [Google Scholar] [CrossRef]
- Chen, J.; He, Y.; Wang, J. Multi-feature fusion based fast video flame detection. Build. Environ. 2010, 45, 1113–1122. [Google Scholar] [CrossRef]
- Muhammad, K.; Ahmad, J.; Mehmood, I.; Rho, S.; Baik, S. Convolutional Neural Networks Based Fire Detection in Surveillance Videos. IEEE Access 2018, 6, 18174–18183. [Google Scholar] [CrossRef]
- AnimHossain, F.; Zhang, Y.; Akter, M. Forest fire flame and smoke detection from UAV-captured images using fire-specific color features and multi-color space local binary pattern. J. Unmanned Veh. Syst. 2020, 8, 285–309. [Google Scholar]
- Chen, Y.; Xu, W.; Zuo, J.; Yang, K. The fire recognition algorithm using dynamic feature fusion and IV-SVM classifier. Clust. Comput. 2019, 22, 7665–7675. [Google Scholar] [CrossRef]
- Kuang, F.; Xu, W.; Zhang, S. A novel hybrid KPCA and SVM with GA model for intrusion detection. Appl. Soft Comput. 2014, 18, 178–184. [Google Scholar] [CrossRef]
- Cui, Y.; Qu, F. Experimental Discussion on Fire Image Recognition Based on Feature Extraction. J. Phys. Conf. Ser. 2021, 2066, 012086. [Google Scholar] [CrossRef]
- Prasad, G.; Vijay, G.; Raghavendra, K. Comparative study on classification of machined surfaces using ML techniques applied to GLCM based image features. Mater. Today Proc. 2022, 62, 1440–1445. [Google Scholar] [CrossRef]
- Wang, W.; Zhang, B.; Wang, Z.; Zhang, F.; Liu, Q. Garbage image recognition and classification based on hog feature and SVM-Boosting. J. Phys. Conf. Ser. 2021, 1966, 012002. [Google Scholar]
- Liu, Z.; Yang, Y.; Ji, X. Flame detection algorithm based on a saliency detection technique and the uniform local binary pattern in the YCbCr color space. Signal Image Video Process. 2016, 10, 277–284. [Google Scholar] [CrossRef]
- Ashour, M.; Khalid, F.; Halin, A. Machining process classification using PCA reduced histogram features and the Support Vector Machine. In Proceedings of the IEEE International Conference on Signal & Image Processing Applications, Kuala Lumpur, Malaysia, 19–21 October 2016. [Google Scholar]
- Liu, J.; Wang, X.; Wang, T. Classification of tree species and stock volume estimation in ground forest images using Deep Learning. Comput. Electron. Agric. 2019, 166, 105012. [Google Scholar] [CrossRef]
- Seifert, E.; Seifert, S.; Vogt, H.; Drew, D.; Van Aardt, J.; Kunneke, A.; Seifert, T. Influence of drone altitude, image overlap, and optical sensor resolution on multi-view reconstruction of forest images. Remote Sens. 2019, 11, 1252. [Google Scholar] [CrossRef] [Green Version]
- Lai, Y.; Wang, X.; Rockett, T.B.O.; Willmott, J.R.; Zhang, Y. Investigation into wind effects on fire spread on inclined wooden rods by multi-spectrum and schlieren imaging. Fire Saf. J. 2022, 127, 103513. [Google Scholar] [CrossRef]
- He, Q.; Tang, F.; Zhao, Y.; Hu, P.; Gu, M. An experimental study on the intermittent flame ejecting behavior and critical excess heat release rate of carriage fires in tunnels with longitudinal ventilation. Int. J. Therm. Sci. 2022, 176, 107483. [Google Scholar] [CrossRef]
- Zhao, J.; Zhang, X.; Zhang, J.; Wang, W.; Chen, C. Experimental study on the flame length and burning behaviors of pool fires with different ullage heights. Energy 2022, 246, 123397. [Google Scholar] [CrossRef]
- Zhao, J.; Zhu, H.; Zhang, J.; Huang, H.; Yang, R. Experimental study on the spread and burning behaviors of continuously discharge spill fires under different slopes. J. Hazard. Mater. 2020, 392, 122352. [Google Scholar] [CrossRef]
- Li, P.; Zeng, Q.; Duan, Q.; Sun, J. Visualization of spontaneous ignition and flame behavior in tubes with and without obstacles during the high-pressure hydrogen release. Process Saf. Environ. Prot. 2021, 153, 354–362. [Google Scholar] [CrossRef]
- Lukac, R.; Plataniotis, K. Universal demosaicking for imaging pipelines with an RGB color filter array. Pattern Recognit. 2005, 38, 2208–2212. [Google Scholar] [CrossRef]
- Jia, N.; Kootstra, G.; Koerkamp, P.; Shi, Z.; Du, S. Segmentation of body parts of cows in RGB-depth images based on template matching. Comput. Electron. Agric. 2021, 180, 105897. [Google Scholar] [CrossRef]
- Jiang, X.; Gao, M.; Gao, Z. A novel index to detect green-tide using UAV-based RGB imagery. Estuar. Coast. Shelf Sci. 2020, 245, 106943. [Google Scholar] [CrossRef]
- Dong, L.; Zhang, W.; Xu, W. Underwater image enhancement via integrated RGB and LAB color models. Signal Process. Image Commun. 2022, 104, 116684. [Google Scholar] [CrossRef]
- Khalili, M. DCT-Arnold chaotic based watermarking using JPEG-YCbCr. Opt.-Int. J. Light Electron Opt. 2015, 126, 4367–4371. [Google Scholar] [CrossRef]
- Zhao, Y.; Zhong, Z.; Xu, M. Forest Fire Smoke Video Detection Using Spatiotemporal and Dynamic Texture Features. J. Electr. Comput. Eng. 2015, 2015, 40. [Google Scholar] [CrossRef] [Green Version]
- Saigaa, M.; Chitroub, S.; Meraoumia, A. An effective biometric identification system using enhanced palm texture features. Evol. Syst. 2021, 13, 43–63. [Google Scholar] [CrossRef]
- Ojala, T.; Pietikainen, M.; Harwood, D. A Comparative Study of Texture Measures with Classification Based on Feature Distributions. Pattern Recognit. 1996, 29, 51–59. [Google Scholar] [CrossRef]
- Haralick, R.; Shanmugam, K.; Dinstein, I. Textural Features for Image Classification. Stud. Media Commun. 1973, 6, 610–621. [Google Scholar] [CrossRef] [Green Version]
- Ulaby, F.; Kouyate, F.; Brisco, B.; Lee Williams, T. Textural information in SAR images. IEEE Trans. Geosci. Remote Sens. 1986, 24, 235–245. [Google Scholar] [CrossRef]
- Mathew, A.; Antony, A.; Mahadeshwar, Y.; Khan, T.; Kulkarni, A. Plant disease detection using GLCM feature extractor and voting classification approach. Mater. Today Proc. 2022, 58, 407–415. [Google Scholar] [CrossRef]
- Zhao, X.; Xue, L.; Xu, F. Asphalt pavement paving segregation detection method using more efficiency and quality texture features extract algorithm. Constr. Build. Mater. 2021, 277, 122302. [Google Scholar] [CrossRef]
- Li, P.; Zhao, W. Image fire detection algorithms based on convolutional neural networks. Case Stud. Therm. Eng. 2020, 19, 100625. [Google Scholar] [CrossRef]
- Sethy, P.; Barpanda, N.; Rath, A.; Behera, S. Deep feature based rice leaf disease identification using support vector machine. Comput. Electron. Agric. 2020, 175, 105527. [Google Scholar] [CrossRef]
- Alamgir, N.; Nguyen, K.; Chandran, V.; Boles, W. Combining multi-channel color space with local binary co-occurrence feature descriptors for accurate smoke detection from surveillance videos. Fire Saf. J. 2018, 102, 1–10. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Threshold | RGT | |||||
|---|---|---|---|---|---|---|
| 30 | 40 | 50 | 60 | 70 | ||
| RBT | 30 | 0.6249 | 0.6534 | 0.7126 | 0.7743 | 0.7683 |
| 40 | 0.7095 | 0.7097 | 0.7255 | 0.8051 | 0.7957 | |
| 50 | 0.7545 | 0.7545 | 0.7552 | 0.7584 | 0.7695 | |
| 60 | 0.7200 | 0.7200 | 0.7200 | 0.7201 | 0.7186 | |
| 70 | 0.6415 | 0.6416 | 0.6416 | 0.6416 | 0.6417 | |
| Picture Types | A | C1 | I | C2 |
|---|---|---|---|---|
| Forest image without fire | 0 | 0 | 0 | NaN |
| Forest image with fire | 0.0351 | 6.8054 | 0.6473 | 0.5862 |
| Forest image with fire-like interference | 0.0263 | 40.2476 | 0.3872 | −0.0207 |
| Forest without Fire | Forest Image with Fire 1 | Forest Image with Fire 2 | Forest Image with Fire 3 | Interference 1 | Interference 2 | Interference 3 | |
|---|---|---|---|---|---|---|---|
 |  |  |  |  |  |  | |
| L1 | 0.0000 | 0.1187 | 0.1292 | 0.0976 | 0.0942 | 0.1417 | 0.1196 |
| L2 | 0.0000 | 0.1021 | 0.1071 | 0.0922 | 0.1077 | 0.0560 | 0.1129 |
| L3 | 0.0000 | 0.0538 | 0.0530 | 0.0759 | 0.0676 | 0.0101 | 0.0509 |
| L4 | 0.0000 | 0.0472 | 0.0472 | 0.0806 | 0.0697 | 0.0126 | 0.0480 |
| L5 | 0.0000 | 0.0413 | 0.0369 | 0.0697 | 0.0601 | 0.0062 | 0.0339 |
| L6 | 0.0000 | 0.0300 | 0.0308 | 0.0532 | 0.0268 | 0.0022 | 0.0170 |
| L7 | 0.0000 | 0.0180 | 0.0266 | 0.0313 | 0.0106 | 0.0000 | 0.0089 |
| L8 | 0.0000 | 0.0206 | 0.0361 | 0.0282 | 0.0047 | 0.0000 | 0.0074 |
| L9 | 0.0000 | 0.4034 | 0.3329 | 0.3245 | 0.4617 | 0.7557 | 0.5004 |
| L10 | 0.0000 | 0.1647 | 0.2002 | 0.1469 | 0.0967 | 0.0155 | 0.1011 |
| A | 0.0000 | 0.0019 | 0.0019 | 0.0022 | 0.0018 | 0.0031 | 0.0011 |
| C1 | 0.0000 | 0.9776 | 0.9471 | 0.9424 | 0.9782 | 1.0018 | 0.9925 |
| I | 0.0000 | 0.0188 | 0.0296 | 0.0336 | 0.0184 | 0.0042 | 0.0098 |
| C2 | NaN | 0.0017 | 0.0214 | 0.0217 | 0.0016 | −0.0091 | −0.0033 |
| Algorithm | Vector Dimensions | Sample Size | Number of Correct Recognitions | Accuracy |
|---|---|---|---|---|
| 10 | 190 | 156 | 82.11 | |
| 10 | 190 | 163 | 85.78 | |
| 4 | 190 | 161 | 84.73 | |
| 14 | 190 | 174 | 91.58 | |
| 14 | 190 | 177 | 93.15 |
| Recognition Algorithm | The Proposed Algorithm | Convolutional Neural Network |
|---|---|---|
| Identification accuracy | 93.15% | 91.42% |
| Total time-consuming | 9.22 min | 28.30 min |
| Recognition rate | 0.42 s | 1.29 s |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, C.; Liu, Q.; Li, B.; Liu, L. Investigation of Recognition and Classification of Forest Fires Based on Fusion Color and Textural Features of Images. Forests 2022, 13, 1719. https://doi.org/10.3390/f13101719
Li C, Liu Q, Li B, Liu L. Investigation of Recognition and Classification of Forest Fires Based on Fusion Color and Textural Features of Images. Forests. 2022; 13(10):1719. https://doi.org/10.3390/f13101719
Chicago/Turabian StyleLi, Cong, Qiang Liu, Binrui Li, and Luying Liu. 2022. "Investigation of Recognition and Classification of Forest Fires Based on Fusion Color and Textural Features of Images" Forests 13, no. 10: 1719. https://doi.org/10.3390/f13101719