
LiDAR Applications to Estimate Forest Biomass at Individual Tree Scale: Opportunities, Challenges and Future Perspectives


Abstract
:1. Introduction
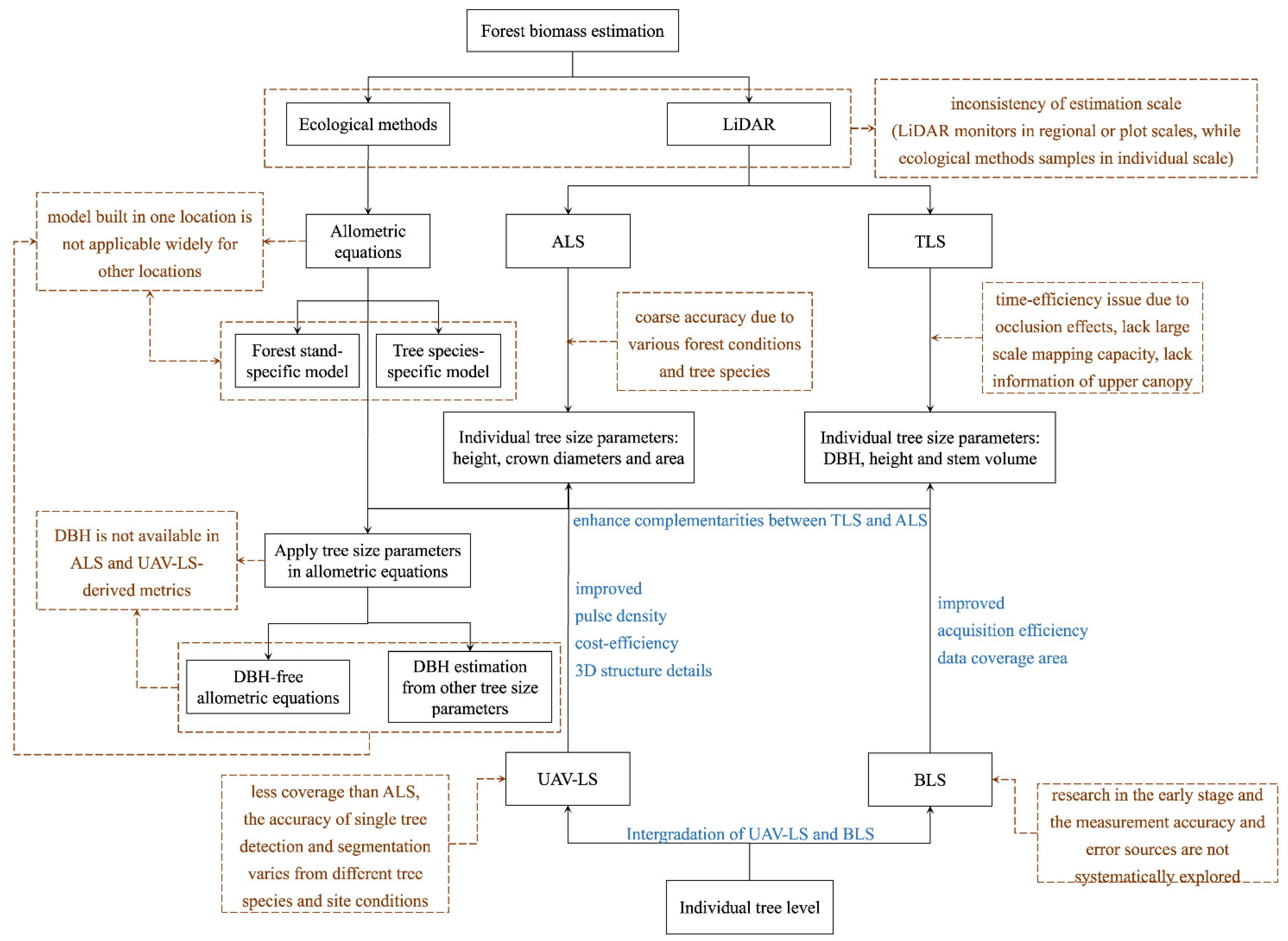
2. Current Methodology and Challenges for Forest Biomass Estimation at the Individual Tree Scale
2.1. Allometric Equation (Traditional Forest Estimation at the Individual Tree Scale)
2.2. Applying LiDAR for Forest Biomass Estimation at the Individual Tree Scale
2.2.1. Terrestrial Laser Scanning (TLS)
2.2.2. Airborne Laser Scanning (ALS)
2.2.3. Unmanned Aerial Vehicle Laser Scanning (UAV-LS)
2.2.4. Mobile Laser Scanning (MLS)
2.3. The Impact of Forest Conditions and Species on AGB Estimation at the Individual Tree Scale Based on LiDAR Data
2.3.1. Effects of Forest Site Conditions
2.3.2. Effects of Forest Types and Tree Species
2.3.3. Integrating Optical Images to Reduce the Effects of Tree Species and Forest Conditions
2.4. Challenges to Current Methods
3. Future Directions for Forest Biomass Estimation at the Individual Tree Scale Using Remote Sensing
3.1. Improving the Accuracy of Single Tree Detection and Segmentation with Automatic Processing Capacity Based on UAV-LS Data
3.2. Improving the Accuracy of LiDAR-Derived Tree Size Parameters
3.3. AGB Estimation at the Individual Tree Scale by Integrating UAV-LS and BLS
3.4. The Effects of Forest Structure and Site Condition on AGB Estimation at the Individual Tree Scale
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Hofstad, O. Review of biomass and volume functions for individual trees and shrubs in southeast africa. J. Trop. For. Sci. 2005, 17, 151–162. [Google Scholar]
- Parresol, B.R. Assessing tree and stand biomass: A review with examples and critical comparisons. For. Sci. 1999, 45, 573–593. [Google Scholar]
- Shrestha, D.B.; Sharma, R.P.; Bhandari, S.K. Individual tree aboveground biomass for castanopsis indica in the mid-hills of nepal. Agrofor. Syst. 2018, 92, 1611–1623. [Google Scholar] [CrossRef]
- Ozcelik, R.; Eraslan, T. Two-stage sampling to estimate individual tree biomass. Turk. J. Agric. For. 2012, 36, 389–398. [Google Scholar]
- Edson, C.; Wing, M.G. Airborne light detection and ranging (lidar) for individual tree stem location, height, and biomass measurements. Remote Sens. 2011, 3, 2494–2528. [Google Scholar] [CrossRef] [Green Version]
- Allouis, T.; Durrieu, S.; Vega, C.; Couteron, P. Stem volume and above-ground biomass estimation of individual pine trees from lidar data: Contribution of full-waveform signals. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2013, 6, 924–934. [Google Scholar] [CrossRef]
- Hember, R.A.; Kurz, W.A. Low tree-growth elasticity of forest biomass indicated by an individual-based model. Forests 2018, 9, 21. [Google Scholar] [CrossRef] [Green Version]
- Anjin, C.; Yongmin, K.; Yongil, K.; Yangdam, E. Estimation of individual tree biomass from airborne lidar data using tree height and crown diameter. Disaster Adv. 2012, 5, 360–365. [Google Scholar]
- Bortolot, Z.J.; Wynne, R.H. Estimating forest biomass using small footprint lidar data: An individual tree-based approach that incorporates training data. ISPRS J. Photogramm. Remote Sens. 2005, 59, 342–360. [Google Scholar] [CrossRef]
- Zeng, W.; Fu, L.; Xu, M.; Wang, X.; Chen, Z.; Yao, S. Developing individual tree-based models for estimating aboveground biomass of five key coniferous species in china. J. For. Res. 2018, 29, 1251–1261. [Google Scholar] [CrossRef]
- Kim, Y.; Chang, A.; Kim, Y.; Song, J.; Kim, C. Estimation of forest biomass from airborne lidar data as measures against global warming-individual tree unit and forest stand unit. Disaster Adv. 2012, 5, 295–299. [Google Scholar]
- Allouis, T.; Durrieu, S.; Vega, C.; Couteron, P. Exploiting fullwavefrom lidar signals to estimate timber volume and above-ground biomass of individual trees. In Proceedings of the 2011 IEEE International Geoscience and Remote Sensing Symposium, Vancouver, BC, Canada, 24–29 July 2011; pp. 1251–1254. [Google Scholar]
- Krofcheck, D.J.; Litvak, M.E.; Lippitt, C.D.; Neuenschwander, A. Woody biomass estimation in a southwestern u.S. Juniper savanna using lidar-derived clumped tree segmentation and existing allometries. Remote Sens. 2016, 8, 453. [Google Scholar] [CrossRef] [Green Version]
- Fu, L.; Zeng, W.; Zhang, H.; Wang, G.; Lei, Y.; Tang, S. Generic linear mixed-effects individual-tree biomass models for pinus massoniana in southern china. South. For. 2014, 76, 47–56. [Google Scholar] [CrossRef]
- Oliveira, N.; Rodriguez-Soalleiro, R.; Perez-Cruzado, C.; Canellas, I.; Sixto, H. On the genetic affinity of individual tree biomass allometry in poplar short rotation coppice. Bioenergy Res. 2017, 10, 525–535. [Google Scholar] [CrossRef]
- Zeng, W.; Duo, H.; Lei, X.; Chen, X.; Wang, X.; Pu, Y.; Zou, W. Individual tree biomass equations and growth models sensitive to climate variables for larix spp. In china. Eur. J. For. Res. 2017, 136, 233–249. [Google Scholar] [CrossRef]
- Wang, X.; Bi, H.; Ximenes, F.; Ramos, J.; Li, Y. Product and residue biomass equations for individual trees in rotation age pinus radiata stands under three thinning regimes in new south wales, australia. Forests 2017, 8, 439. [Google Scholar] [CrossRef] [Green Version]
- LeBauer, D.S.; Treseder, K.K. Nitrogen limitation of net primary productivity in terrestrial ecosystems is globally distributed. Ecology 2008, 89, 371–379. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Way, D.A.; Oren, R. Differential responses to changes in growth temperature between trees from different functional groups and biomes: A review and synthesis of data. Tree Physiol. 2010, 30, 669–688. [Google Scholar] [CrossRef] [Green Version]
- Bugmann, H.; Bigler, C. Will the CO2 fertilization effect in forests be offset by reduced tree longevity? Oecologia 2011, 165, 533–544. [Google Scholar] [CrossRef]
- Friend, A.D.; Lucht, W.; Rademacher, T.T.; Keribin, R.; Betts, R.; Cadule, P.; Ciais, P.; Clark, D.B.; Dankers, R.; Falloon, P.D.; et al. Carbon residence time dominates uncertainty in terrestrial vegetation responses to future climate and atmospheric CO2. Proc. Natl. Acad. Sci. USA 2014, 111, 3280–3285. [Google Scholar] [CrossRef] [Green Version]
- Manusch, C.; Bugmann, H.; Heiri, C.; Wolf, A. Tree mortality in dynamic vegetation models—A key feature for accurately simulating forest properties. Ecol. Model. 2012, 243, 101–111. [Google Scholar] [CrossRef]
- Chander, G.; Haque, M.O.; Micijevic, E.; Barsi, J.A. A procedure for radiometric recalibration of landsat 5 tm reflective-band data. IEEE Trans. Geosci. Remote Sens. 2010, 48, 556–574. [Google Scholar] [CrossRef]
- Keles, S. Optimum cutting ages in hybrid poplar plantations including carbon sequestration: A case study in turkey. Serie Ciencias Forestales Ambiente 2016, 22, 339–349. [Google Scholar] [CrossRef] [Green Version]
- Badreldin, N.; Sanchez-Azofeifa, A. Estimating forest biomass dynamics by integrating multi-temporal landsat satellite images with ground and airborne lidar data in the coal valley mine, alberta, canada. Remote Sens. 2015, 7, 2832–2849. [Google Scholar] [CrossRef] [Green Version]
- Ma, A.; Liu, B. Estimation of Forest Above-Ground Biomass Using Spot-5 Image in Mountain Areas; DEStech Publications: Lancaster, PA, USA, 2015. [Google Scholar]
- Motlagh, M.G.; Kafaky, S.B.; Mataji, A.; Akhavan, R. Estimating and mapping forest biomass using regression models and spot-6 images (case study: Hyrcanian forests of north of iran). Environ. Monit. Assess. 2018, 190, 352. [Google Scholar] [CrossRef] [PubMed]
- Muhd-Ekhzarizal, M.E.; Mohd-Hasmadi, I.; Hamdan, O.; Mohamad-Roslan, M.K.; Noor-Shaila, S. Estimation of aboveground biomass in mangrove forests using vegetation indices from spot-5 image. J. Trop. For. Sci. 2018, 30, 224–233. [Google Scholar]
- Ploton, P.; Barbier, N.; Couteron, P.; Antin, C.M.; Ayyappan, N.; Balachandran, N.; Barathan, N.; Bastin, J.F.; Chuyong, G.; Dauby, G.; et al. Toward a general tropical forest biomass prediction model from very high resolution optical satellite images. Remote Sens. Environ. 2017, 200, 140–153. [Google Scholar] [CrossRef]
- Tao, S.; Guo, Q.; Wu, F.; Li, L.; Wang, S.; Tang, Z.; Xue, B.; Liu, J.; Fang, J. Spatial scale and pattern dependences of aboveground biomass estimation from satellite images: A case study of the sierra national forest, california. Landsc. Ecol. 2016, 31, 1711–1723. [Google Scholar] [CrossRef]
- Zhang, L.; Shao, Z.; Wang, Z. Estimation of forest aboveground biomass using the integration of spectral and textural features from gf-1 satellite image. In Proceedings of the 2016 4th International Workshop on Earth Observation and Remote Sensing Applications, Guangzhou, China, 4–6 July 2016. [Google Scholar]
- Wang, K.; Franklin, S.E.; Guo, X.; Cattet, M. Remote sensing of ecology, biodiversity and conservation: A review from the perspective of remote sensing specialists. Sensors 2010, 10, 9647–9667. [Google Scholar] [CrossRef]
- Wang, Z.; Liu, L.; Peng, D.; Liu, X.; Zhang, S.; Wang, Y. Estimating woody aboveground biomass in an area of agroforestry using airborne light detection and ranging and compact airborne spectrographic imager hyperspectral data: Individual tree analysis incorporating tree species information. J. Appl. Remote Sens. 2016, 10, 036007. [Google Scholar] [CrossRef]
- Goldbergs, G.; Levick, S.R.; Lawes, M.; Edwards, A. Hierarchical integration of individual tree and area-based approaches for savanna biomass uncertainty estimation from airborne lidar. Remote Sens. Environ. 2018, 205, 141–150. [Google Scholar] [CrossRef]
- Ledo, A.; Cornulier, T.; Illian, J.B.; Iida, Y.; Kassim, A.R.; Burslem, D.F.R.P. Re-evaluation of individual diameter:Height allometric models to improve biomass estimation of tropical trees. Ecol. Appl. 2016, 26, 2374–2380. [Google Scholar] [CrossRef] [Green Version]
- Zeng, W.; Zhang, L.; Chen, X.; Cheng, Z.; Ma, K.; Li, Z. Construction of compatible and additive individual-tree biomass models for pinus tabulaeformis in china. Can. J. For. Res. 2017, 47, 467–475. [Google Scholar] [CrossRef]
- Hosoda, K.; Iehara, T. Aboveground biomass equations for individual trees of cryptomeria japonica, chamaecyparis obtusa and larix kaempferi in japan. J. For. Res. 2010, 15, 299–306. [Google Scholar] [CrossRef]
- Sanquetta, C.R.; Dalla Corte, A.P.; Behling, A.; de Oliveira Piva, L.R.; Netto, S.P.; Rodrigues, A.L.; Inoue Sanquetta, M.N. Selection criteria for linear regression models to estimate individual tree biomasses in the atlantic rain forest, Brazil. Carbon Balance Manag. 2018, 13, 25. [Google Scholar] [CrossRef] [PubMed]
- Ter-Mikaelian, M.T.; Korzukhin, M.D. Biomass equations for sixty-five north american tree species. For. Ecol. Manag. 1997, 97, 1–24. [Google Scholar] [CrossRef] [Green Version]
- Dong, L.; Zhang, L.; Li, F. Allometry and partitioning of individual tree biomass and carbon of abies nephrolepis maxim in northeast china. Scand. J. For. Res. 2016, 31, 399–411. [Google Scholar] [CrossRef]
- Tahvanainen, T.; Forss, E. Individual tree models for the crown biomass distribution of scots pine, norway spruce and birch in Finland. For. Ecol. Manag. 2008, 255, 455–467. [Google Scholar] [CrossRef]
- Zeng, W.-S. Using nonlinear mixed model and dummy variable model approaches to develop origin-based individual tree biomass equations. Trees-Struct. Funct. 2015, 29, 275–283. [Google Scholar] [CrossRef]
- Fu, L.; Zeng, W.; Tang, S. Individual tree biomass models to estimate forest biomass for large spatial regions developed using four pine species in china. For. Sci. 2017, 63, 241–249. [Google Scholar]
- Durkaya, B.; Durkaya, A.; Makineci, E.; Karaburk, T. Estimate above-ground biomass and carbon stock of individual trees in uneven-aged uludag fir stand. Fresenius Environ. Bull. 2013, 22, 428–434. [Google Scholar]
- Haara, A.; Nevalainen, S. Detection of dead or defoliated spruces using digital aerial data. For. Ecol Manag 2002, 160, 97–107. [Google Scholar] [CrossRef]
- Trotsiuk, V.; Svoboda, M.; Weber, P.; Pederson, N.; Klesse, S.; Janda, P.; Martin-Benito, D.; Mikolas, M.; Seedre, M.; Bace, R.; et al. The legacy of disturbance on individual tree and stand-level aboveground biomass accumulation and stocks in primary mountain picea abies forests. For. Ecol. Manag. 2016, 373, 108–115. [Google Scholar] [CrossRef] [Green Version]
- Popescu, S.C. Estimating biomass of individual pine trees using airborne lidar. Biomass Bioenergy 2007, 31, 646–655. [Google Scholar] [CrossRef]
- Wulder, M.A.; White, J.C.; Nelson, R.F.; Naesset, E.; Orka, H.O.; Coops, N.C.; Hilker, T.; Bater, C.W.; Gobakken, T. Lidar sampling for large-area forest characterization: A review. Remote Sens. Environ. 2012, 121, 196–209. [Google Scholar] [CrossRef] [Green Version]
- Riggio, M.; Anthony, R.W.; Augelli, F.; Kasal, B.; Lechner, T.; Muller, W.; Tannert, T. In situ assessment of structural timber using non-destructive techniques. Mater. Struct. 2014, 47, 749–766. [Google Scholar] [CrossRef]
- Cao, L.; Gao, S.; Li, P.; Yun, T.; Shen, X.; Ruan, H. Aboveground biomass estimation of individual trees in a coastal planted forest using full-waveform airborne laser scanning data. Remote Sens. 2016, 8, 729. [Google Scholar] [CrossRef] [Green Version]
- Giannico, V.; Lafortezza, R.; John, R.; Sanesi, G.; Pesola, L.; Chen, J. Estimating stand volume and above-ground biomass of urban forests using lidar. Remote Sens. 2016, 8, 339. [Google Scholar] [CrossRef] [Green Version]
- Popescu, S.C.; Wynne, R.H.; Nelson, R.F. Measuring individual tree crown diameter with lidar and assessing its influence on estimating forest volume and biomass. Can. J. Remote Sens. 2003, 29, 564–577. [Google Scholar] [CrossRef]
- Beland, M.; Parker, G.; Sparrow, B.; Harding, D.; Chasmer, L.; Phinn, S.; Antonarakis, A.; Strahler, A. On promoting the use of lidar systems in forest ecosystem research. For. Ecol. Manag. 2019, 450, 117484. [Google Scholar] [CrossRef]
- Wang, D.; Takoudjou, S.M.; Casella, E. Lewos: A universal leaf-wood classification method to facilitate the 3D modelling of large tropical trees using terrestrial lidar. Methods Ecol. Evol. 2020, 11, 376–389. [Google Scholar] [CrossRef]
- Calders, K.; Armston, J.; Newnham, G.; Herold, M.; Goodwin, N. Implications of sensor configuration and topography on vertical plant profiles derived from terrestrial lidar. Agric. For. Meteorol. 2014, 194, 104–117. [Google Scholar] [CrossRef]
- Takoudjou, S.M.; Ploton, P.; Sonke, B.; Hackenberg, J.; Griffon, S.; de Coligny, F.; Kamdem, N.G.; Libalah, M.; Mofack, G.I.; Le Moguedec, G.; et al. Using terrestrial laser scanning data to estimate large tropical trees biomass and calibrate allometric models: A comparison with traditional destructive approach. Methods Ecol. Evol. 2018, 9, 905–916. [Google Scholar] [CrossRef]
- Stovall, A.E.L.; Vorster, A.G.; Anderson, R.S.; Evangelista, P.H.; Shugart, H.H. Non-destructive aboveground biomass estimation of coniferous trees using terrestrial lidar. Remote Sens. Environ. 2017, 200, 31–42. [Google Scholar] [CrossRef]
- Brede, B.; Calders, K.; Lau, A.; Raumonen, P.; Bartholomeus, H.M.; Herold, M.; Kooistra, L. Non-destructive tree volume estimation through quantitative structure modelling: Comparing uav laser scanning with terrestrial lidar. Remote Sens. Environ. 2019, 233, 111355. [Google Scholar] [CrossRef]
- Wang, X.; Xie, D.; Yan, G.; Zhang, W.; Wang, Y.; Chen, Y. 3D reconstruction of a single tree from terrestrial lidar data. In Proceedings of the 2014 IEEE International Geoscience and Remote Sensing Symposium, Québec City, QC, Canada, 13–18 July 2014; pp. 796–799. [Google Scholar]
- Ehbrecht, M.; Schall, P.; Juchheim, J.; Ammer, C.; Seidel, D. Effective number of layers: A new measure for quantifying three-dimensional stand structure based on sampling with terrestrial lidar. For. Ecol. Manag. 2016, 380, 212–223. [Google Scholar] [CrossRef]
- Kim, A.M.; Olsen, R.C.; Beland, M. Simulated full-waveform lidar compared to riegl vz-400 terrestrial laser scans. In Laser Radar Technology and Applications XXI; Turner, M.D., Kamerman, G.W., Eds.; SPIE: Bellingham, WA, USA, 2016; Volume 9832. [Google Scholar]
- Yang, X.; Strahler, A.H.; Schaaf, C.B.; Jupp, D.L.B.; Yao, T.; Zhao, F.; Wang, Z.; Culvenor, D.S.; Newnham, G.J.; Lovell, J.L.; et al. Three-dimensional forest reconstruction and structural parameter retrievals using a terrestrial full-waveform lidar instrument (echidn (r)). Remote Sens. Environ. 2013, 135, 36–51. [Google Scholar] [CrossRef]
- Bremer, M.; Wichmann, V.; Rutzinger, M. Multi-temporal fine-scale modelling of larix decidua forest plots using terrestrial lidar and hemispherical photographs. Remote Sens. Environ. 2018, 206, 189–204. [Google Scholar] [CrossRef]
- Hildebrandt, R.; Iost, A. From points to numbers: A database-driven approach to convert terrestrial lidar point clouds to tree volumes. Eur. J. For. Res. 2012, 131, 1857–1867. [Google Scholar] [CrossRef]
- Bazezew, M.N.; Hussin, Y.A.; Kloosterman, E.H. Integrating airborne lidar and terrestrial laser scanner forest parameters for accurate above-ground biomass/carbon estimation in ayer hitam tropical forest, malaysia. Int. J. Appl. Earth Obs. Geoinf. 2018, 73, 638–652. [Google Scholar] [CrossRef]
- Xie, D.; Wang, X.; Qi, J.; Chen, Y.; Mu, X.; Zhang, W.; Yan, G. Reconstruction of single tree with leaves based on terrestrial lidar point cloud data. Remote Sens. 2018, 10, 686. [Google Scholar] [CrossRef] [Green Version]
- Huang, H.; Tang, L.; Chen, C. A 3d Individual Tree Modeling Technique Based on Terrestrial Lidar Point Cloud Data. In Proceedings of the 2015 2nd IEEE International Conference on Spatial Data Mining and Geographical Knowledge Services, Fuzhou, China, 8–10 July 2015; pp. 152–156. [Google Scholar]
- Tao, S.; Wu, F.; Guo, Q.; Wang, Y.; Li, W.; Xue, B.; Hu, X.; Li, P.; Tian, D.; Li, C.; et al. Segmenting tree crowns from terrestrial and mobile lidar data by exploring ecological theories. ISPRS J. Photogramm. Remote Sens. 2015, 110, 66–76. [Google Scholar] [CrossRef] [Green Version]
- Vicari, M.B.; Disney, M.; Wilkes, P.; Burt, A.; Calders, K.; Woodgate, W. Leaf and wood classification framework for terrestrial lidar point clouds. Methods Ecol. Evol. 2019, 10, 680–694. [Google Scholar] [CrossRef] [Green Version]
- Bauwens, S.; Bartholomeus, H.; Calders, K.; Lejeune, P. Forest inventory with terrestrial lidar: A comparison of static and hand-held mobile laser scanning. Forests 2016, 7, 127. [Google Scholar] [CrossRef] [Green Version]
- Kankare, V.; Raety, M.; Yu, X.; Holopainen, M.; Vastaranta, M.; Kantola, T.; Hyyppa, J.; Hyyppa, H.; Alho, P.; Viitala, R. Single tree biomass modelling using airborne laser scanning. ISPRS J. Photogramm. Remote Sens. 2013, 85, 66–73. [Google Scholar] [CrossRef]
- Kankare, V.; Vauhkonen, J.; Holopainen, M.; Vastaranta, M.; Hyyppa, J.; Hyyppa, H.; Alho, P. Sparse density, leaf-off airborne laser scanning data in aboveground biomass component prediction. Forests 2015, 6, 1839–1857. [Google Scholar] [CrossRef]
- White, J.C.; Coops, N.C.; Wulder, M.A.; Vastaranta, M.; Hilker, T.; Tompalski, P. Remote sensing technologies for enhancing forest inventories: A review. Can. J. Remote Sens. 2016, 42, 619–641. [Google Scholar] [CrossRef] [Green Version]
- Kaartinen, H.; Hyyppa, J.; Yu, X.; Vastaranta, M.; Hyyppa, H.; Kukko, A.; Holopainen, M.; Heipke, C.; Hirschmugl, M.; Morsdorf, F.; et al. An international comparison of individual tree detection and extraction using airborne laser scanning. Remote Sens. 2012, 4, 950–974. [Google Scholar] [CrossRef] [Green Version]
- Vauhkonen, J.; Korpela, I.; Maltamo, M.; Tokola, T. Imputation of single-tree attributes using airborne laser scanning-based height, intensity, and alpha shape metrics. Remote Sens. Environ. 2010, 114, 1263–1276. [Google Scholar] [CrossRef]
- Usoltsev, V.A.; Shobairi, S.O.R.; Chasovskikh, V.P. Comparing of allometric models of single-tree biomass intended for airborne laser sensing and terrestrial taxation of carbon pool in the forests of eurasia. Nat. Resour. Model. 2019, 32, e12187. [Google Scholar] [CrossRef] [Green Version]
- Fu, L.; Liu, Q.; Sun, H.; Wang, Q.; Li, Z.; Chen, E.; Pang, Y.; Song, X.; Wang, G. Development of a system of compatible individual tree diameter and aboveground biomass prediction models using error-in-variable regression and airborne lidar data. Remote Sens. 2018, 10, 325. [Google Scholar] [CrossRef] [Green Version]
- Wan-Mohd-Jaafar, W.S.; Woodhouse, I.H.; Silva, C.A.; Omar, H.; Hudak, A.T. Modelling individual tree aboveground biomass using discrete return lidar in lowland dipterocarp forest of malaysia. J. Trop. For. Sci. 2017, 29, 465–484. [Google Scholar]
- Apostol, B.; Lorent, A.; Petrila, M.; Gancz, V.; Badea, O. Height extraction and stand volume estimation based on fusion airborne lidar data and terrestrial measurements for a norway spruce Picea abies (L.) Karst. Test site in romania. Not. Bot. Hortic. Agrobot. Cluj-Napoca 2016, 44, 313–323. [Google Scholar] [CrossRef] [Green Version]
- Dong, T.; Zhou, Q.; Gao, S.; Shen, Y. Automatic detection of single trees in airborne laser scanning data through gradient orientation clustering. Forests 2018, 9, 291. [Google Scholar] [CrossRef] [Green Version]
- Zhang, J.; Sohn, G.; Bredif, M. A hybrid framework for single tree detection from airborne laser scanning data: A case study in temperate mature coniferous forests in ontario, canada. ISPRS J. Photogramm. Remote Sens. 2014, 98, 44–57. [Google Scholar] [CrossRef] [Green Version]
- Ene, L.; Naesset, E.; Gobakken, T. Single tree detection in heterogeneous boreal forests using airborne laser scanning and area-based stem number estimates. Int. J. Remote Sens. 2012, 33, 5171–5193. [Google Scholar] [CrossRef]
- Heurich, M. Automatic recognition and measurement of single trees based on data from airborne laser scanning over the richly structured natural forests of the bavarian forest national park. For. Ecol. Manag. 2008, 255, 2416–2433. [Google Scholar] [CrossRef]
- Vastaranta, M.; Saarinen, N.; Kankare, V.; Holopainen, M.; Kaartinen, H.; Hyyppa, J.; Hyyppa, H. Multisource single-tree inventory in the prediction of tree quality variables and logging recoveries. Remote Sens. 2014, 6, 3475–3491. [Google Scholar] [CrossRef] [Green Version]
- Hauglin, M.; Dibdiakova, J.; Gobakken, T.; Naesset, E. Estimating single-tree branch biomass of norway spruce by airborne laser scanning. ISPRS J. Photogramm. Remote Sens. 2013, 79, 147–156. [Google Scholar] [CrossRef]
- Hauglin, M.; Gobakken, T.; Astrup, R.; Ene, L.; Naesset, E. Estimating single-tree crown biomass of norway spruce by airborne laser scanning: A comparison of methods with and without the use of terrestrial laser scanning to obtain the ground reference data. Forests 2014, 5, 384–403. [Google Scholar] [CrossRef]
- Murgoitio, J.; Shrestha, R.; Glenn, N.; Spaete, L. Airborne lidar and terrestrial laser scanning derived vegetation obstruction factors for visibility models. Trans. Gis 2014, 18, 147–160. [Google Scholar] [CrossRef]
- Wu, X.; Shen, X.; Cao, L.; Wang, G.; Cao, F. Assessment of individual tree detection and canopy cover estimation using unmanned aerial vehicle based light detection and ranging (uav-lidar) data in planted forests. Remote Sens. 2019, 11, 908. [Google Scholar] [CrossRef] [Green Version]
- Yan, W.; Guan, H.; Cao, L.; Yu, Y.; Gao, S.; Lu, J. An automated hierarchical approach for three-dimensional segmentation of single trees using uav lidar data. Remote Sens. 2018, 10, 1999. [Google Scholar] [CrossRef] [Green Version]
- Wallace, L.; Lucieer, A.; Watson, C.S. Evaluating tree detection and segmentation routines on very high resolution uav lidar data. IEEE Trans. Geosci. Remote Sens. 2014, 52, 7619–7628. [Google Scholar] [CrossRef]
- Balsi, M.; Esposito, S.; Fallavollita, P.; Nardinocchi, C. Single-tree detection in high-density lidar data from uav-based survey. Eur. J. Remote Sens. 2018, 51, 679–692. [Google Scholar] [CrossRef] [Green Version]
- Dalla Corte, A.P.; Souza, D.V.; Rex, F.E.; Sanquetta, C.R.; Mohan, M.; Silva, C.A.; Zambrano, A.M.A.; Prata, G.; de Almeida, D.R.A.; Trautenmueller, J.W.; et al. Forest inventory with high-density uav-lidar: Machine learning approaches for predicting individual tree attributes. Comput. Electron. Agric. 2020, 179, 105815. [Google Scholar] [CrossRef]
- Dalla Corte, A.P.; Rex, F.E.; Alves de Almeida, D.R.; Sanquetta, C.R.; Silva, C.A.; Moura, M.M.; Wilkinson, B.; Almeyda Zambrano, A.M.; da Cunha Neto, E.M.; Veras, H.F.P.; et al. Measuring individual tree diameter and height using gatoreye high-density uav-lidar in an integrated crop-livestock-forest system. Remote Sens. 2020, 12, 863. [Google Scholar] [CrossRef] [Green Version]
- Chen, X.; Jiang, K.; Zhu, Y.; Wang, X.; Yun, T. Individual tree crown segmentation directly from uav-borne lidar data using the pointnet of deep learning. Forests 2021, 12, 131. [Google Scholar] [CrossRef]
- Yin, D.; Wang, L. Individual mangrove tree measurement using uav-based lidar data: Possibilities and challenges. Remote Sens. Environ. 2019, 223, 34–49. [Google Scholar] [CrossRef]
- Picos, J.; Bastos, G.; Miguez, D.; Alonso, L.; Armesto, J. Individual tree detection in a eucalyptus plantation using unmanned aerial vehicle (uav)-lidar. Remote Sens. 2020, 12, 885. [Google Scholar] [CrossRef] [Green Version]
- Brede, B.; Lau, A.; Bartholomeus, H.M.; Kooistra, L. Comparing riegl ricopter uav lidar derived canopy height and dbh with terrestrial lidar. Sensors 2017, 17, 2371. [Google Scholar] [CrossRef]
- Lu, J.; Wang, H.; Qin, S.; Cao, L.; Pu, R.; Li, G.; Sun, J. Estimation of aboveground biomass of robinia pseudoacacia forest in the yellow river delta based on uav and backpack lidar point clouds. Int. J. Appl. Earth Obs. Geoinf. 2020, 86, 102014. [Google Scholar] [CrossRef]
- Yan, Z.; Liu, R.; Cheng, L.; Zhou, X.; Ruan, X.; Xiao, Y. A concave hull methodology for calculating the crown volume of individual trees based on vehicle-borne lidar data. Remote Sens. 2019, 11, 623. [Google Scholar] [CrossRef] [Green Version]
- Xie, Y.; Zhang, J.; Chen, X.; Pang, S.; Zeng, H.; Shen, Z. Accuracy assessment and error analysis for diameter at breast height measurement of trees obtained using a novel backpack lidar system. For. Ecosyst. 2020, 7, 33. [Google Scholar] [CrossRef]
- Zhang, C.; Yang, G.; Jiang, Y.; Xu, B.; Li, X.; Zhu, Y.; Lei, L.; Chen, R.; Dong, Z.; Yang, H. Apple tree branch information extraction from terrestrial laser scanning and backpack-lidar. Remote Sens. 2020, 12, 3592. [Google Scholar] [CrossRef]
- Gregoire, T.G.; Næsset, E.; Mcroberts, R.E.; Ståhl, G.; Andersen, H.E.; Gobakken, T.; Ene, L.; Nelson, R. Statistical rigor in lidar-assisted estimation of aboveground forest biomass. Remote Sens Env. 2016, 173, 98–108. [Google Scholar] [CrossRef]
- Yu, X.; Hyyppa, J.; Vastaranta, M.; Holopainen, M.; Viitala, R. Predicting individual tree attributes from airborne laser point clouds based on the random forests technique. ISPRS J. Photogramm. Remote Sens. 2011, 66, 28–37. [Google Scholar] [CrossRef]
- Vauhkonen, J.; Ene, L.; Gupta, S.; Heinzel, J.; Holmgren, J.; Pitkänen, J.; Solberg, S.; Wang, Y.; Weinacker, H.; Hauglin, K.M. Comparative testing of single-tree detection algorithms under different types of forest. Forestry 2011, 85, 27–40. [Google Scholar] [CrossRef] [Green Version]
- Liu, F.; Tan, C.; Lei, P.-F. Estimating individual tree aboveground biomass of the mid-subtropical forest using airborne lidar technology. J. Appl. Ecol. 2014, 25, 3229–3236. [Google Scholar]
- Clark, M.L.; Roberts, D.A.; Ewel, J.J.; Clark, D.B. Estimation of tropical rain forest aboveground biomass with small-footprint lidar and hyperspectral sensors. Remote Sens. Environ. 2011, 115, 2931–2942. [Google Scholar] [CrossRef]
- Estornell, J.; Ruiz, L.A.; Velazquez-Marti, B.; Hermosilla, T. Estimation of biomass and volume of shrub vegetation using lidar and spectral data in a mediterranean environment. Biomass Bioenergy 2012, 46, 710–721. [Google Scholar] [CrossRef] [Green Version]
- Latifi, H.; Fassnacht, F.; Koch, B. Forest structure modeling with combined airborne hyperspectral and lidar data. Remote Sens. Environ. 2012, 121, 10–25. [Google Scholar] [CrossRef]
- Dalponte, M.; Frizzera, L.; Orka, H.O.; Gobakken, T.; Naesset, E.; Gianelle, D. Predicting stem diameters and aboveground biomass of individual trees using remote sensing data. Ecol. Indic. 2018, 85, 367–376. [Google Scholar] [CrossRef]
- Ediriweera, S.; Pathirana, S.; Danaher, T.; Nichols, D. Estimating above-ground biomass by fusion of lidar and multispectral data in subtropical woody plant communities in topographically complex terrain in north-eastern australia. J. For. Res. 2014, 25, 761–771. [Google Scholar] [CrossRef]
- Lucas, R.M.; Lee, A.C.; Bunting, P.J. Retrieving forest biomass through integration of casi and lidar data. Int. J. Remote Sens. 2018, 29, 1553–1577. [Google Scholar] [CrossRef]
- Moe, K.T.; Owari, T.; Furuya, N.; Hiroshima, T. Comparing individual tree height information derived from field surveys, lidar and uav-dap for high-value timber species in northern japan. Forests 2020, 11, 223. [Google Scholar] [CrossRef] [Green Version]
- Patrick, A.; Li, C. High throughput phenotyping of blueberry bush morphological traits using unmanned aerial systems. Remote Sens. 2017, 9, 1250. [Google Scholar] [CrossRef] [Green Version]
- Giannetti, F.; Puletti, N.; Quatrini, V.; Travaglini, D.; Bottalico, F.; Corona, P.; Chirici, G. Integrating terrestrial and airborne laser scanning for the assessment of single-tree attributes in mediterranean forest stands. Eur. J. Remote Sens. 2018, 51, 795–807. [Google Scholar] [CrossRef] [Green Version]
- Polewski, P.; Yao, W.; Cao, L.; Gao, S. Marker-free coregistration of uav and backpack lidar point clouds in forested areas. ISPRS J. Photogramm. Remote Sens. 2019, 147, 307–318. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
| TLS | Strength |
|
| Weakness |
| |
| ALS | Strength |
|
| Weakness |
| |
| UAV-LS | Strength |
|
| Weakness |
| |
| BLS | Strength |
|
| Weakness |
|
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xu, D.; Wang, H.; Xu, W.; Luan, Z.; Xu, X. LiDAR Applications to Estimate Forest Biomass at Individual Tree Scale: Opportunities, Challenges and Future Perspectives. Forests 2021, 12, 550. https://doi.org/10.3390/f12050550
Xu D, Wang H, Xu W, Luan Z, Xu X. LiDAR Applications to Estimate Forest Biomass at Individual Tree Scale: Opportunities, Challenges and Future Perspectives. Forests. 2021; 12(5):550. https://doi.org/10.3390/f12050550
Chicago/Turabian StyleXu, Dandan, Haobin Wang, Weixin Xu, Zhaoqing Luan, and Xia Xu. 2021. "LiDAR Applications to Estimate Forest Biomass at Individual Tree Scale: Opportunities, Challenges and Future Perspectives" Forests 12, no. 5: 550. https://doi.org/10.3390/f12050550