A Comparative Study to Evaluate Accuracy on Canopy Height and Density Using UAV, ALS, and Fieldwork


Abstract
:1. Introduction
2. Research Area and Methodology
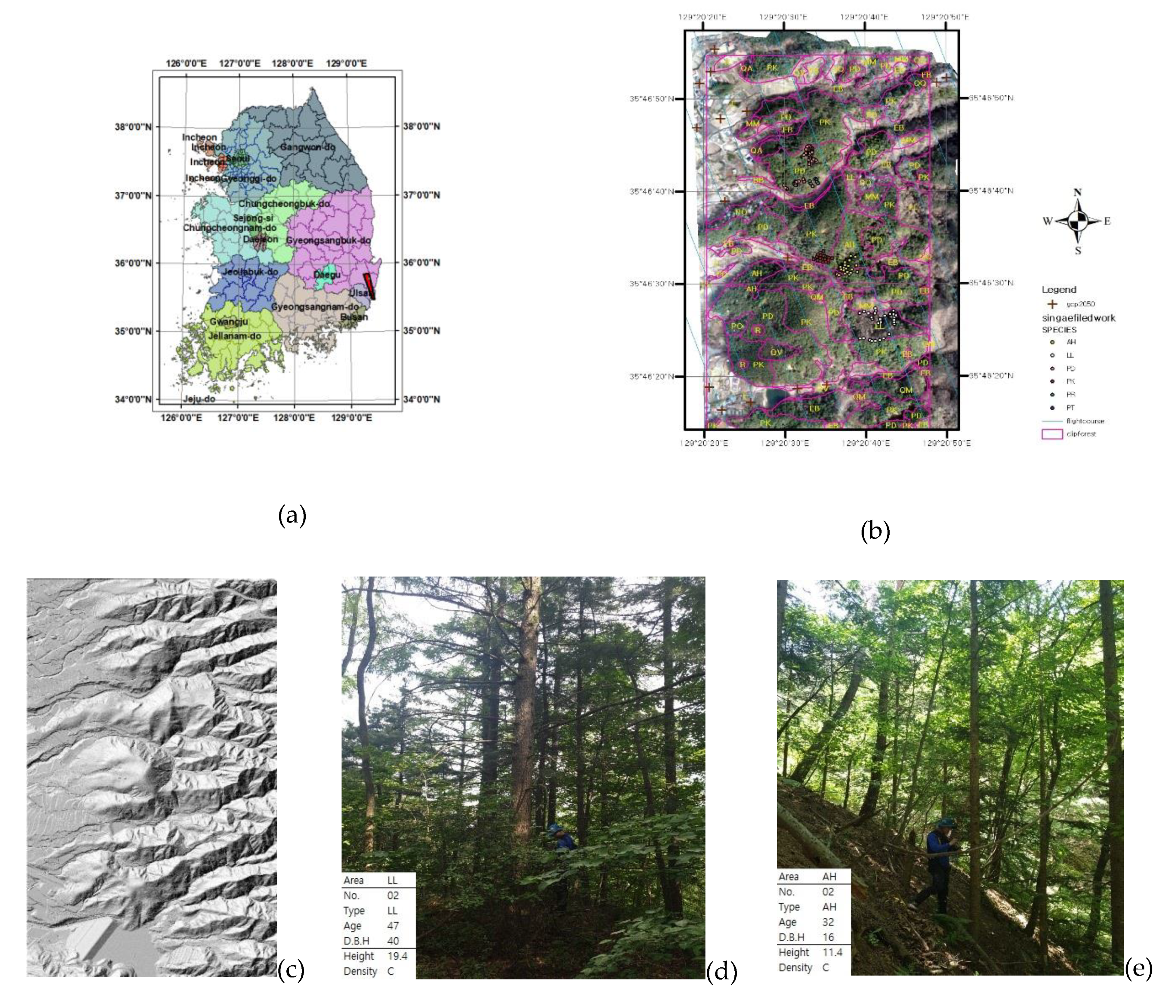
2.1. Study Area
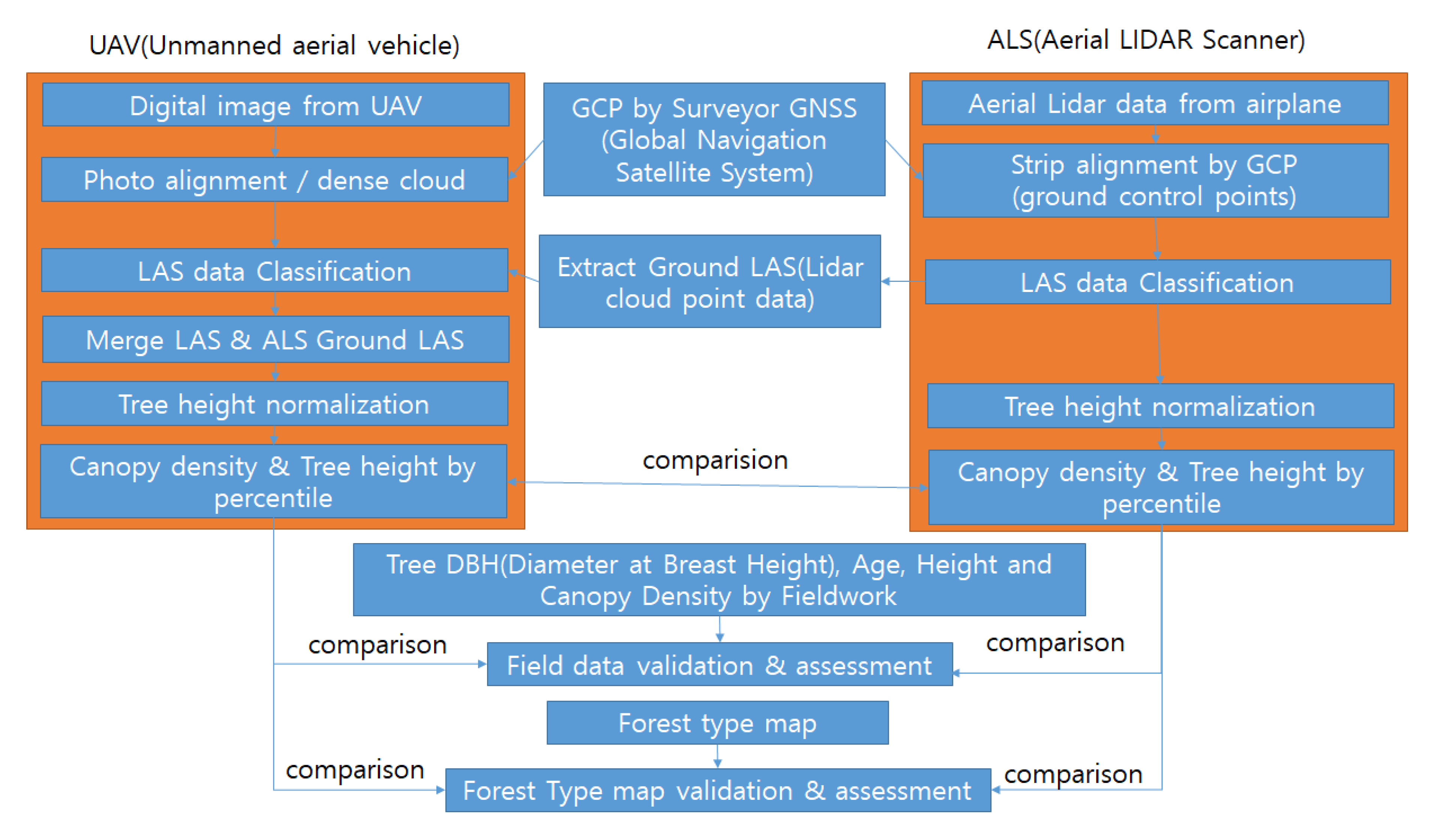
2.2. Aerial LIDAR and Data Processing
2.3. UAV Digital Image and Data Processing
2.4. Field Forest Measurement
2.5. Tree Standard Metrics for UAV, ALS, and Class Definition in the Forest Type Map of South Korea.
3. Results and Discussion
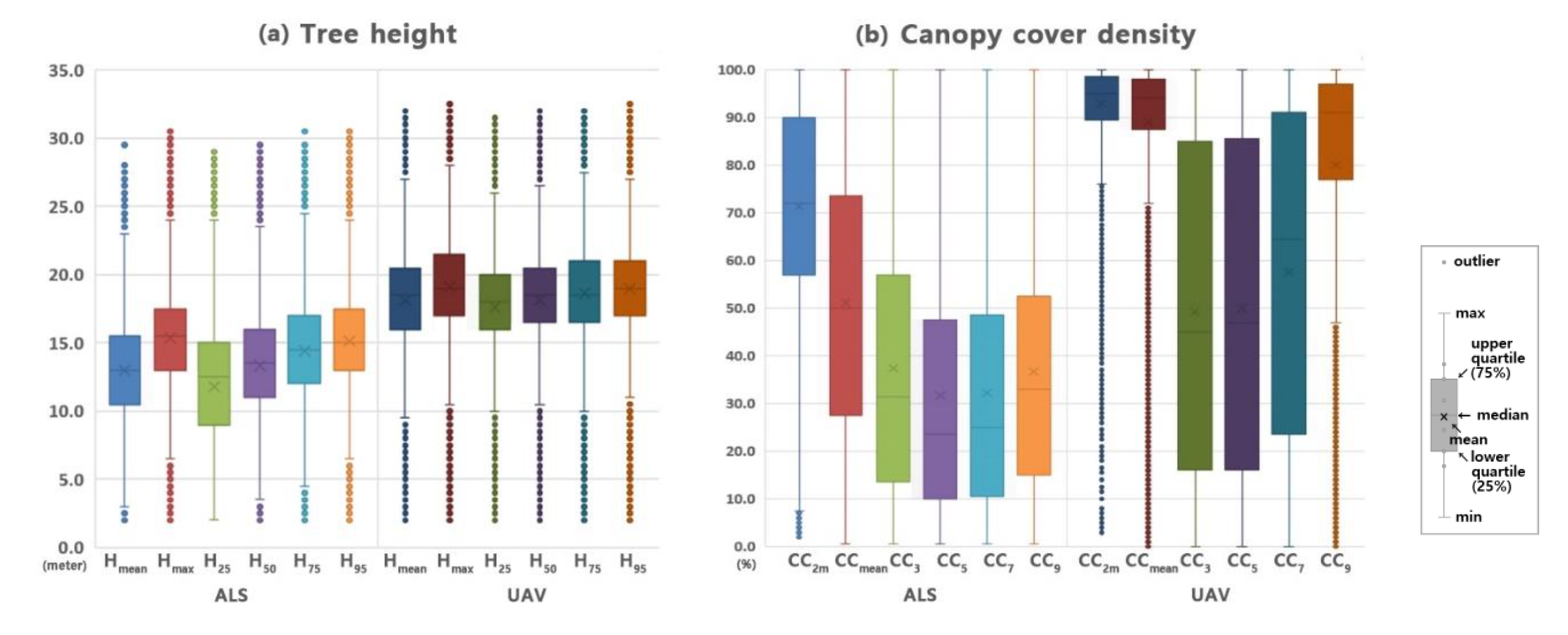
3.1. Comparison of the Standard Metrics of UAV and ALS Point Clouds
3.2. Analyses of Tree Height, Diameter at Breast Height, Tree Age, and Canopy Cover Density for Fieldwork Data
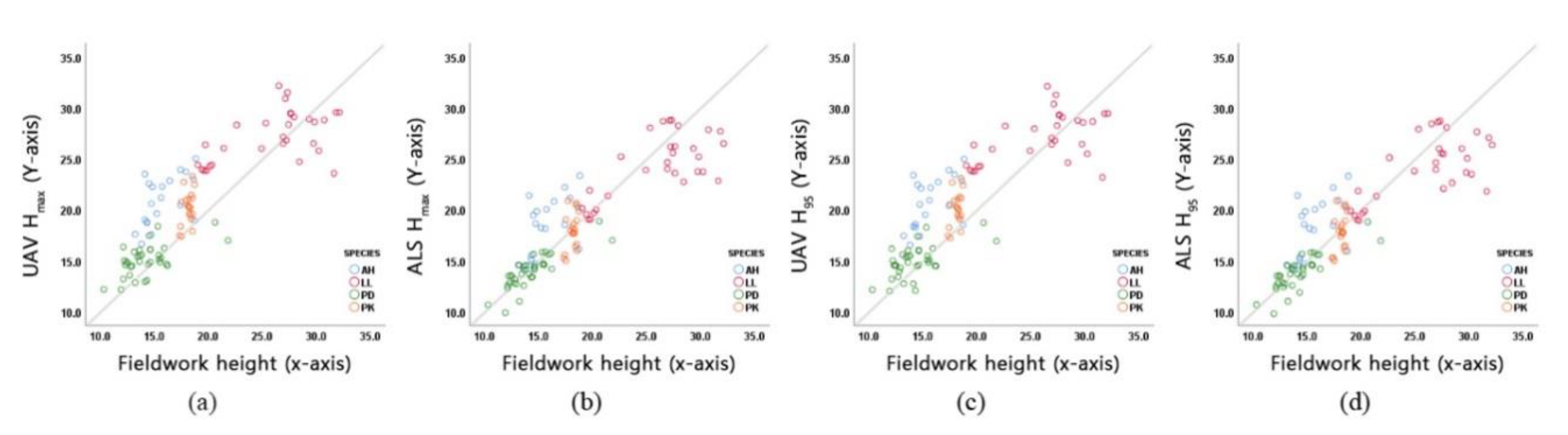
3.3. Tree Height and Canopy Cover Density Accuracy Assessment with Fieldwork and ALS & UAV Data by Tree Point
3.4. Comparison of Tree Height and Canopy Cover Density Using the Forest Type Map and Fieldwork Data in Same Polygon
3.5. Tree Height and Canopy Cover Density Recorded in The Forest Type Map Against Measurements Using UAV and ALS
4. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Korea Statistical Information Service Forest Area and Growing Stock Statics. Available online: http://index.go.kr/potal/main/EachDtlPageDetail.do?idx_cd=1300 (accessed on 14 August 2019).
- Kim, K.; Mun, G.; Lee, J.; Kim, C.; Lim, J. Application of Remote Sensing Data for Advancing Forest Type Map; Research Report; Korea National Institute of Forest Service: Seoul, Korea, 2016; Volume 30, ISBN 979-11-6019-030-4.
- Hernández-Clemente, R.; Navarro-Cerrillo, R.M.; Ramírez, F.J.R.; Hornero, A.; Zarco-Tejada, P.J. A Novel Methodology to Estimate Single-Tree Biophysical Parameters from 3D Digital Imagery Compared to Aerial Laser Scanner Data. Remote Sens. 2014, 6, 11627–11648. [Google Scholar] [CrossRef] [Green Version]
- Brede, B.; Lau, A.; Bartholomeus, H.M.; Kooistra, L. Comparing RIEGL RiCOPTER UAV LiDAR Derived Canopy Height and DBH with Terrestrial LiDAR. Sensors 2017, 17, 2371. [Google Scholar] [CrossRef] [PubMed]
- Andersen, H.-E.; Reutebuch, S.E.; McGaughey, R.J. A rigorous assessment of tree height measurements obtained using airborne LIDAR and conventional field methods. Can. J. Remote Sens. 2006, 32, 355–366. [Google Scholar] [CrossRef]
- Clark, M.L.; Clark, D.B.; Roberts, D.A. Small-footprint lidar estimation of sub-canopy elevation and tree height in a tropical rain forest landscape. Remote Sens. Environ. 2004, 91, 68–89. [Google Scholar] [CrossRef]
- Kwak, D.-A.; Lee, W.-K.; Lee, J.-H.; Biging, G.S.; Gong, P. Detection of individual trees and estimation of tree height using LiDAR data. J. For. Res. 2007, 12, 425–434. [Google Scholar] [CrossRef]
- Falkowski, M.J.; Smith, A.M.S.; Hudak, A.T.; Gessler, P.E.; Vierling, L.A.; Crookston, N.L. Automated estimation of individual conifer tree height and crown diameter via two-dimensional spatial wavelet analysis of lidar data. Can. J. Remote Sens. 2006, 32, 153–161. [Google Scholar] [CrossRef] [Green Version]
- Zarco-Tejada, P.J.; Diaz-Varela, R.; Angileri, V.; Loudjani, P. Tree height quantification using very high resolution imagery acquired from an unmanned aerial vehicle (UAV) and automatic 3D photo-reconstruction methods. Eur. J. Agron. 2014, 55, 89–99. [Google Scholar] [CrossRef]
- Panagiotidis, D.; Abdollahnejad, A.; Surový, P.; Chiteculo, V. Determining tree height and crown diameter from high-resolution UAV imagery. Int. J. Remote Sens. 2017, 38, 2392–2410. [Google Scholar] [CrossRef]
- Thiel, C.; Schmullius, C. Comparison of UAV photograph-based and airborne lidar-based point clouds over forest from a forestry application perspective. Int. J. Remote Sens. 2017, 38, 2411–2426. [Google Scholar] [CrossRef]
- Brandtberg, T.; Warner, T.A.; Landenberger, R.E.; McGraw, J.B. Detection and analysis of individual leaf-off tree crowns in small footprint, high sampling density lidar data from the eastern deciduous forest in North America. Remote Sens. Environ. 2003, 85, 290–303. [Google Scholar] [CrossRef]
- Persson, A.E.G.; Holmgren, J.; Soederman, U. Detecting and measuring individual trees using an airborne laser scanner. Photogramm. Eng. Remote Sens. 2002, 68, 925–932. [Google Scholar]
- Isenburg, M. Bayes Strip Align 2.1 Software Manual. Available online: http://bayesmap.com/wp-content/uploads/StripAlign2manual.pdf (accessed on 2 July 2019).
- Isenburg, M. LAS File Processing Using LASTOOLS. Available online: ftp://ftp.lmic.state.mn.us/pub/data/elevation/lidar/LAS_File_Processing_Using_LASTOOLS.pdf (accessed on 29 December 2019).
- Shivakoti, G.; Pradhan, U.; Helmi, H. Redefining Diversity and Dynamics of Natural Resources Management in Asia, Volume 1: Sustainable Natural Resources Management in Dynamic Asia; Elsevier: Amsterdam, The Netherlands, 2016; ISBN 978-0-12-810470-5. [Google Scholar]
- Berni, J.; Zarco-Tejada, P.J.; Suarez, L.; Fereres, E. Thermal and Narrowband Multispectral Remote Sensing for Vegetation Monitoring from an Unmanned Aerial Vehicle. IEEE Trans. Geosci. Remote Sens. 2009, 47, 722–738. [Google Scholar] [CrossRef] [Green Version]
- Shervais, K.; Dietrich, J.; Lauer, I. Structure from Motion (SfM) Photogrammetry Data Exploration and Processing Manual. Available online: https://kb.unavco.org/kb/file.php?id=781 (accessed on 29 December 2019).
- Sanz-Ablanedo, E.; Chandler, J.; Rodríguez-Pérez, J.; Ordóñez, C. Accuracy of Unmanned Aerial Vehicle (UAV) and SfM Photogrammetry Survey as a Function of the Number and Location of Ground Control Points Used. Remote Sens. 2018, 10, 1606. [Google Scholar] [CrossRef] [Green Version]
- Edson, C.; Wing, M.G. Airborne Light Detection and Ranging (LiDAR) for Individual Tree Stem Location, Height, and Biomass Measurements. Remote Sens. 2011, 3, 2494–2528. [Google Scholar] [CrossRef] [Green Version]
- Wallace, L.; Lucieer, A.; Watson, C.; Turner, D. Development of a UAV-LiDAR System with Application to Forest Inventory. Remote Sens. 2012, 4, 1519–1543. [Google Scholar] [CrossRef] [Green Version]
- White, J.; Stepper, C.; Tompalski, P.; Coops, N.; Wulder, M. Comparing ALS and Image-Based Point Cloud Metrics and Modelled Forest Inventory Attributes in a Complex Coastal Forest Environment. Forests 2015, 6, 3704–3732. [Google Scholar] [CrossRef]
- Cao, L.; Liu, H.; Fu, X.; Zhang, Z.; Shen, X.; Ruan, H. Comparison of UAV LiDAR and Digital Aerial Photogrammetry Point Clouds for Estimating Forest Structural Attributes in Subtropical Planted Forests. Forests 2019, 10, 145. [Google Scholar] [CrossRef] [Green Version]
- Kim, K.M.; Kim, C.M.; Kim, S.M.; Jung, J.H.; Lee, S.H.; KIm, J.C.; RYU, J.H.; Shim, U.B.; Kim, J.S.; Seo, S.W.; et al. 4th Forest Type Map; Korea Forest Research Institute: Seoul, Korea, 2009; p. 8. [Google Scholar]
- Lisein, J.; Pierrot-Deseilligny, M.; Bonnet, S.; Lejeune, P. A Photogrammetric Workflow for the Creation of a Forest Canopy Height Model from Small Unmanned Aerial System Imagery. Forests 2013, 4, 922–944. [Google Scholar] [CrossRef] [Green Version]
- Vastaranta, M.; Wulder, M.; White, J.; Pekkarinen, A.; Tuominen, S.; Ginzler, C.; Kankare, V.; Holopainen, M.; Hyyppä, J.; Hyyppä, H. Airborne laser scanning and digital stereo imagery measures of forest structure: Comparative results and implications to forest mapping and inventory update. Can. J. Remote Sens. 2013, 39, 382–395. [Google Scholar] [CrossRef]
- Suárez, J.C.; Ontiveros, C.; Smith, S.; Snape, S. Use of airborne LiDAR and aerial photography in the estimation of individual tree heights in forestry. Comput. Geosci. 2005, 31, 253–262. [Google Scholar] [CrossRef]
- Leberl, F.; Irschara, A.; Pock, T.; Meixner, P.; Gruber, M.; Scholz, S.; Wiechert, A. Point Clouds. Photogramm. Eng. Remote Sens. 2010, 76, 1123–1134. [Google Scholar] [CrossRef]
- Baltsavias, E.P. A comparison between photogrammetry and laser scanning. ISPRS J. Photogramm. Remote Sens. 1999, 54, 83–94. [Google Scholar] [CrossRef]
- Haala, N.; Hastedt, H.; Wolf, K.; Ressl, C.; Baltrusch, S. Digital Photogrammetric Camera Evaluation–Generation of Digital Elevation Models. Photogramm. Fernerkund. Geoinf. 2010, 2010, 99–115. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Popescu, S.C.; Wynne, R.H.; Nelson, R.F. Estimating plot-level tree heights with lidar: Local filtering with a canopy-height based variable window size. Comput. Electron. Agric. 2002, 37, 71–95. [Google Scholar] [CrossRef]
- Bohlin, J.; Wallerman, J.; Fransson, J.E.S. Forest variable estimation using photogrammetric matching of digital aerial images in combination with a high-resolution DEM. Scand. J. For. Res. 2012, 27, 692–699. [Google Scholar] [CrossRef]
- Järnstedt, J.; Pekkarinen, A.; Tuominen, S.; Ginzler, C.; Holopainen, M.; Viitala, R. Forest variable estimation using a high-resolution digital surface model. ISPRS J. Photogramm. Remote Sens. 2012, 74, 78–84. [Google Scholar] [CrossRef]
- White, J.; Wulder, M.; Vastaranta, M.; Coops, N.; Pitt, D.; Woods, M. The Utility of Image-Based Point Clouds for Forest Inventory: A Comparison with Airborne Laser Scanning. Forests 2013, 4, 518–536. [Google Scholar] [CrossRef] [Green Version]
- Ma, Q.; Su, Y.; Guo, Q. Comparison of Canopy Cover Estimations from Airborne LiDAR, Aerial Imagery, and Satellite Imagery. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2017, 10, 4225–4236. [Google Scholar] [CrossRef]
- Bondarchuk, S.N. Study of the Young Growth of Main Forest-forming Coniferous Species in the Primary Forests of the Sikhote-Alin Nature Reserve. Achiev. Life Sci. 2015, 9, 37–50. [Google Scholar] [CrossRef] [Green Version]
- Hwang, S.-R.; Lee, M.-J.; Lee, I.-P. Detection of Individual Trees and Estimation of Mean Tree Height using Airborne LIDAR Data. J. Korea Spat. Inf. Soc. 2012, 20, 27–38. [Google Scholar]
- Shin, P.; Sankey, T.; Moore, M.; Thode, A. Evaluating Unmanned Aerial Vehicle Images for Estimating Forest Canopy Fuels in a Ponderosa Pine Stand. Remote Sens. 2018, 10, 1266. [Google Scholar] [CrossRef] [Green Version]
- Wu, X.; Shen, X.; Cao, L.; Wang, G.; Cao, F. Assessment of Individual Tree Detection and Canopy Cover Estimation using Unmanned Aerial Vehicle based Light Detection and Ranging (UAV-LiDAR) Data in Planted Forests. Remote Sens. 2019, 11, 908. [Google Scholar] [CrossRef] [Green Version]
- Korhonen, L.; Korhonen, K.; Rautiainen, M.; Stenberg, P. Estimation of forest canopy cover: A comparison of field measurement techniques. Silva Fenn. 2006, 40, 577–588. [Google Scholar] [CrossRef] [Green Version]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Item | Point Count | Percent (%) | Z Min (m) | Z Max (m) | Density (point·m−2) | |||||
|---|---|---|---|---|---|---|---|---|---|---|
| ALS | UAV | ALS | UAV | ALS | UAV | ALS | UAV | ALS | UAV | |
| 1st | 12,447,163 | 16,031,828 | 67.59 | 100.00 | 198.0 | 198.6 | 384.1 | 384.3 | 13.2 | 17.0 |
| 2nd | 5,094,477 | 27.66 | 198.0 | 380.2 | 5.4 | |||||
| 3rd | 830,550 | 4.51 | 198.1 | 374.4 | 0.9 | |||||
| 4th | 42,842 | 0.23 | 202.1 | 367.7 | 0.0 | |||||
| Single | 7,355,064 | 16,031,828 | 39.94 | 100.00 | 198.0 | 198.6 | 383.3 | 384.3 | 7.8 | 17.0 |
| All | 18,415,032 | 16,031,828 | 100.00 | 100.00 | 198.0 | 198.6 | 384.1 | 384.3 | 19.5 | 17.0 |
| Tree Height (Above 2m from Ground) | Canopy Cover Density (Above 2m from Ground) | ||||
|---|---|---|---|---|---|
| Standard Metric | Description | Standard Metric | Description | ||
| Percentiles | H25 | Above 25th height | Percentiles | CC3 | Above 25th canopy cover |
| H50 | Above 50th height | CC5 | Above 50th canopy cover | ||
| H75 | Above 75th height | CC7 | Above 75th canopy cover | ||
| H95 | Above 95th height | CC9 | Above 95th canopy cover | ||
| Hmax | Max. height | CC2m | Canopy cover above 2m | ||
| Hmean | Mean height | CCmean | Canopy cover above mean height | ||
| Tree Age | Class | Class Definition | Diameter at Breast Height | Class | Class Definition | |
|---|---|---|---|---|---|---|
| 1st | 1 | 1~10years old | Seedling | 0 | < 6cm | |
| 2nd | 2 | 11~20years old | Small | 1 | 6~18cm | |
| 3rd | 3 | 21~30years old | Medium | 2 | 18~30cm | |
| 4th | 4 | 31~40years old | Large | 3 | > 30cm | |
| 5th | 5 | 41~50years old | Tree Height | 2 m interval Class rounded down | ||
| 6th | 6 | 51~60years old | Canopy cover density | Class | Class definition | |
| 7th | 7 | 61~70years old | Low | A | 50% Lower cover | |
| 8th | 8 | 71~80years old | Medium | B | 50%~70% cover | |
| 9th | 9 | Upper 81 years old | High | C | 70% upper cover | |
| Tree Height Correlation | UAV | ||||||
|---|---|---|---|---|---|---|---|
| H25 | H50 | H75 | H95 | Hmax | Hmean | ||
| ALS | H25 | 0.478 | 0.527 | 0.555 | 0.551 | 0.546 | 0.535 |
| H50 | 0.588 | 0.659 | 0.707 | 0.707 | 0.704 | 0.670 | |
| H75 | 0.674 | 0.764 | 0.826 | 0.832 | 0.830 | 0.777 | |
| H95 | 0.709 | 0.810 | 0.882 | 0.892 | 0.892 | 0.824 | |
| Hmax | 0.709 | 0.812 | 0.886 | 0.898 | 0.898 | 0.826 | |
| Hmean | 0.622 | 0.696 | 0.745 | 0.745 | 0.741 | 0.708 | |
| Canopy Cover Correlation | UAV | ||||||
|---|---|---|---|---|---|---|---|
| CC2m | CCmean | CC3 | CC5 | CC7 | CC9 | ||
| ALS | CC3 | 0.106 | −0.009 | 0.246 | 0.275 | 0.263 | −0.246 |
| CC5 | 0.228 | 0.002 | −0.064 | 0.035 | 0.160 | 0.090 | |
| CC7 | 0.235 | 0.024 | −0.035 | −0.075 | −0.020 | 0.219 | |
| CC9 | 0.192 | −0.071 | −0.005 | −0.038 | −0.126 | 0.208 | |
| CC2m | 0.305 | −0.070 | −0.133 | −0.149 | 0.019 | 0.321 | |
| CCmean | −0.003 | 0.324 | 0.224 | 0.076 | 0.087 | −0.035 | |
| Fieldwork | Mean | Median | Stdev | Min | Max | Mean | Median | Stdev | Min | Max |
|---|---|---|---|---|---|---|---|---|---|---|
| CC | AH (N = 20) C: 100% | PD (N = 40) C: 100% | ||||||||
| HGT | 15.7 | 15.0 | 1.8 | 13.2 | 18.8 | 14.5 | 14.4 | 2.3 | 10.3 | 21.8 |
| DBH | 26.4 | 26.0 | 5.9 | 16.0 | 42.0 | 37.2 | 39.0 | 7.9 | 22.0 | 51.0 |
| AGE | 40.6 | 41.5 | 3.1 | 32.0 | 45.0 | 61.0 | 57.0 | 11.8 | 41.0 | 87.0 |
| CC | LL (N = 30) C: 100% | PK (N = 20) C: 100% | ||||||||
| HGT | 25.9 | 27.2 | 4.2 | 19.0 | 32.1 | 18.1 | 18.2 | 0.4 | 17.3 | 18.7 |
| DBH | 37.9 | 38.5 | 5.7 | 23.0 | 47.0 | 26.8 | 27.0 | 3.9 | 21.0 | 34.0 |
| AGE | 49.8 | 51.5 | 4.8 | 38.0 | 56.0 | 42.2 | 42.0 | 0.8 | 41.0 | 43.0 |
| Tree Height Fieldwork (N = 110) | Hmax | H95 | ||||||
|---|---|---|---|---|---|---|---|---|
| UAV | ALS | UAV | ALS | |||||
| Correlation | 0.865 | 0.899 | 0.867 | 0.898 | ||||
| Res. Mean/Stdev | 2.073 ± 2.702 | −0.020 ± 2.397 | 1.932 ± 2.708 | −0.117 ± 2.440 | ||||
| Res. Min/Max | −4.800 | 9.400 | −6.500 | 7.300 | −4.900 | 9.300 | −6.700 | 7.300 |
| Field Work | Unstandardized Coeff. | Standard Coeff. Beta | t | 95% Confidence for B | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| B | Stdev | Lower | Upper | |||||||||
| By | UAV | ALS | UAV | ALS | UAV | ALS | UAV | ALS | UAV | ALS | UAV | ALS |
| Hmax | 1.083 | 0.978 | 0.015 | 0.012 | 0.99 | 0.99 | 70.98 | 79.45 | 1.053 | 0.953 | 1.114 | 1.002 |
| H95 | 1.076 | 0.970 | 0.015 | 0.013 | 0.99 | 0.99 | 70.72 | 77.11 | 1.046 | 0.945 | 1.106 | 0.995 |
| Canopy Cover Density (Unit: %) | AH(N = 20) | LL(N = 30) | PD(N = 40) | PK(N = 20) | ||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Field Work | Value | Class | Value | Class | Value | Class | Value | Class | ||||||||
| >70.0 | C | >70.0 | C | >70.0 | C | >70.0 | C | |||||||||
| ALS | UAV | ALS | UAV | ALS | UAV | ALS | UAV | ALS | UAV | ALS | UAV | ALS | UAV | ALS | UAV | |
| CC2m | 77.0 | 95.6 | C | C | 64.6 | 88.3 | B | C | 83.1 | 82.3 | C | C | 84.6 | 96.9 | C | C |
| CCmean | 62.2 | 95.6 | B | C | 53.5 | 86.2 | B | C | 27.9 | 48.2 | A | B | 81.6 | 96.9 | C | C |
| Na me | Tree Height(m) (Class1), Value) | Canopy Cover Density(%) (Class2), Value) | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Fieldwork | Map | Diff Class | Fieldwork | Map | Diff Class | |||||||
| Class | Value | Class | Value | Class | Value | Class | Value | Class | Value | Class | Value | |
| AH | 7 | 15.7 | 5 | 11 | 2 | 14.4 | C | C | Same | |||
| LL | 12 | 25.9 | 9 | 19 | 3 | 13.9 | C | C | Same | |||
| PD | 7 | 14.5 | 6 | 13 | 1 | 13.2 | C | C | Same | |||
| PK | 9 | 18.2 | 4 | 9 | 5 | 15.0 | C | C | Same | |||
| Fieldwork. Tree Height unit: m |  AH |  LL |  PD |  PK | ||||
|---|---|---|---|---|---|---|---|---|
| Forest Type Map | 10 | 18 | 12 | 8 | ||||
| Use by | ALS | UAV | ALS | UAV | ALS | UAV | ALS | UAV |
| Hmax | 16.2 + 3.9 | 18.7 ± 2.8 | 17.7 ± 5.6 | 22.4 ± 4.4 | 13.4 ± 4.4 | 14.5 ± 4.6 | 14.9 ± 3.8 | 17.4 ± 3.2 |
| H95 | 16.3 ± 3.1 | 18.5 ± 2.9 | 17.9 ± 4.8 | 22.3 ± 4.4 | 14.1 ± 3.0 | 14.3 ± 4.6 | 15.2 ± 2.7 | 17.3 ± 3.2 |
| diff. | 6.2 – 6.3 | 8.5 – 8.7 | −0.1 – −0.3 | 4.3 – 4.4 | 1.4 – 2.1 | 2.3 – 2.5 | 6.9 – 7.2 | 9.3 – 9.4 |
| Tree Height | Forest Type Map Tree Height | ALS | UAV | |||||
|---|---|---|---|---|---|---|---|---|
| Hmax | H95 | Hmean | Hmax | H95 | Hmean | |||
| Forest type map tree height | 1.000 | −0.199 | −0.151 | −0.286 | −0.186 | −0.189 | −0.207 | |
| ALS | Hmax | −0.199 | 1.000 | 0.944 | 0.983 | 0.886 | 0.884 | 0.870 |
| H95 | −0.151 | 0.944 | 1.000 | 0.927 | 0.860 | 0.959 | 0.836 | |
| Hmean | −0.286 | 0.983 | 0.927 | 1.000 | 0.892 | 0.891 | 0.886 | |
| UAV | Hmax | −0.186 | 0.886 | 0.860 | 0.892 | 1.000 | 1.000 | 0.995 |
| H95 | −0.189 | 0.884 | 0.959 | 0.891 | 1.000 | 1.000 | 0.996 | |
| Hmean | −0.207 | 0.870 | 0.836 | 0.886 | 0.995 | 0.996 | 1.000 | |
| Canopy Cover Density Class | ALS CC2m | UAV CC2m | ALS CCmean | UAV CCmean | ||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Class | Counts | A1) | B1) | C1) | A | B | C | A | B | C | A | B | C | |||||
| Forest type map | A2) | 2 | 1(a) | 1(b) | 0(c) | 0 | 0 | 2 | 1 | 1 | 0 | 1 | 0 | 1 | ||||
| B2) | 15 | 8(d) | 5(a) | 2(b) | 2 | 2 | 11 | 13 | 2 | 0 | 6 | 3 | 6 | |||||
| C2) | 67 | 16(f) | 34(d) | 17(a) | 2 | 9 | 56 | 62 | 5 | 0 | 22 | 16 | 29 | |||||
| Differences | (a) Same | 27.4% | 69.0% | 3.6% | 39.3% | |||||||||||||
| (b) −1, (d) 1 | 3.6%, 50.0% | 13.1%, 13.1% | 1.2%, 21.4% | 7.1%, 26.2% | ||||||||||||||
| (c) −2, (f) 2 | 0.0%, 19.0% | 2.4%, 2.4% | 0.0%, 73.8% | 1.2%, 26.2% | ||||||||||||||
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jin, C.; Oh, C.-y.; Shin, S.; Wilfred Njungwi, N.; Choi, C. A Comparative Study to Evaluate Accuracy on Canopy Height and Density Using UAV, ALS, and Fieldwork. Forests 2020, 11, 241. https://doi.org/10.3390/f11020241
Jin C, Oh C-y, Shin S, Wilfred Njungwi N, Choi C. A Comparative Study to Evaluate Accuracy on Canopy Height and Density Using UAV, ALS, and Fieldwork. Forests. 2020; 11(2):241. https://doi.org/10.3390/f11020241
Chicago/Turabian StyleJin, Cheonggil, Che-young Oh, Sanghyun Shin, Nkwain Wilfred Njungwi, and Chuluong Choi. 2020. "A Comparative Study to Evaluate Accuracy on Canopy Height and Density Using UAV, ALS, and Fieldwork" Forests 11, no. 2: 241. https://doi.org/10.3390/f11020241