2. Materials and Methods
2.1. Method Overview
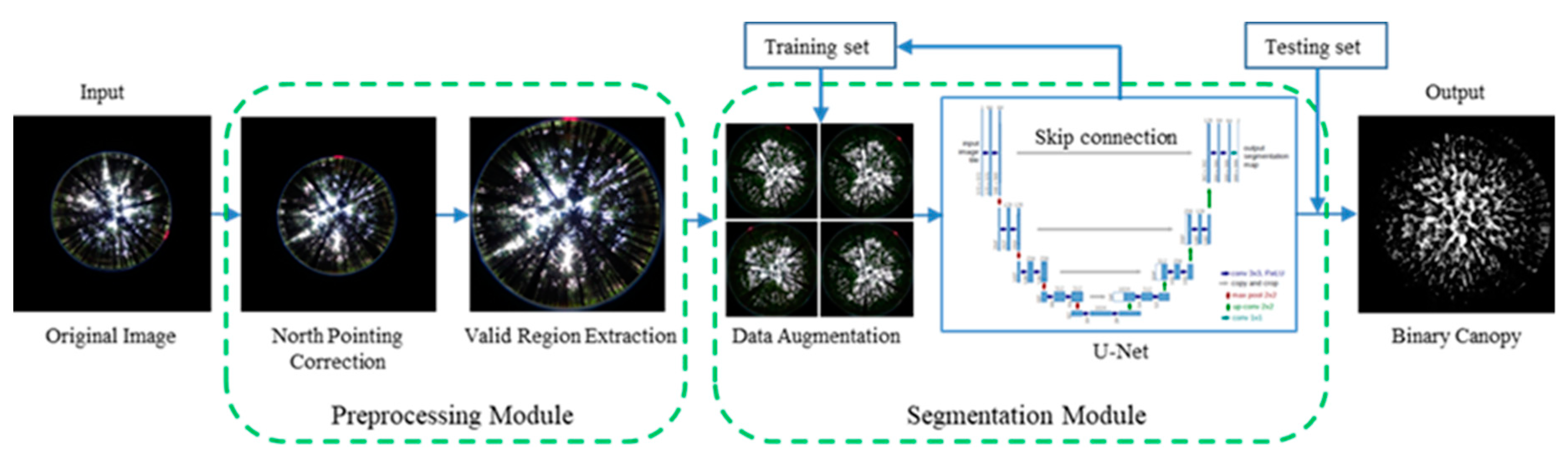
The overall process of the method is shown in
Figure 2.
The method includes two parts, namely, an image preprocessing module and a canopy image segmentation module. The preprocessing module performs the two major tasks of northing correction and the circular valid region extraction, and the cropped image (the valid region image) is sent to the hemispherical image segmentation module. The image segmentation module is a deep segmentation model based on the U-Net network. The U-Net details are described in Figure 5. The training of this model requires a large quantity of data. Therefore, the image data need to be augmented. Then, the augmented canopy images are fed to the U-Net model for learning, and a deep segmentation model of the canopy hemisphere image is obtained. Finally, the test set is inserted into the segmentation model and the results of the binarized canopy images are produced as an output. The detailed steps of each module are described below.
2.2. Acquisition of CHP Data
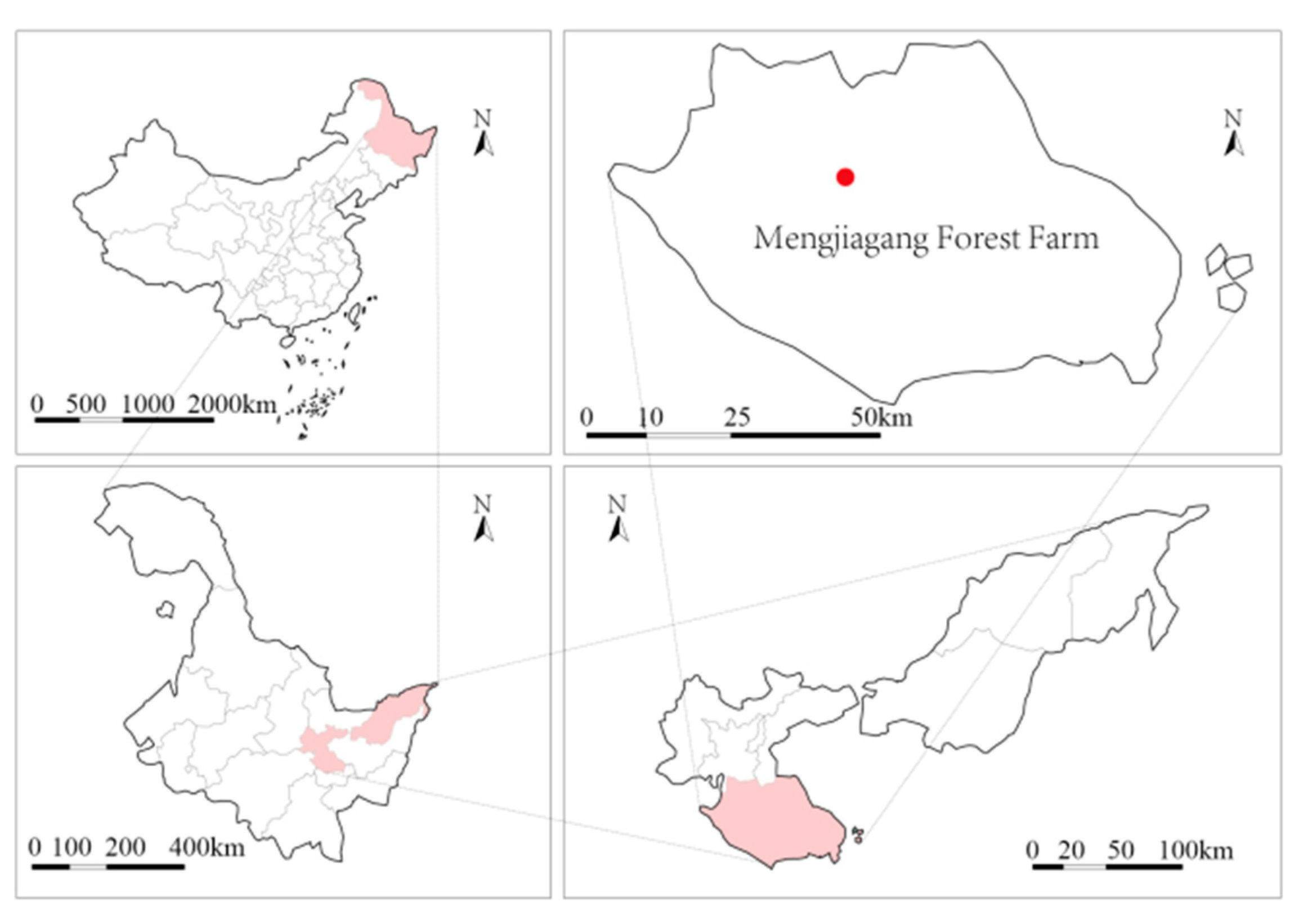
The CHP data (3135 images) were acquired at the Mengjiagang Forest Farm in Jiamusi, Heilongjiang Province, China. The geographical coordinates of the site are 130°32′42′′–130°52′36′′ E and 46°20′16′′–46°30′50′′ N. The site is shown in
Figure 3. The data acquisition time was from 9 to 26 August 2017. The forest types there are Korean pine (
Pinus koraiensis Sieb. et Zucc.), Scots pine (
Pinus sylvestris L. var. mongholica Litv.), and Korean spruce (
Picea koraiensis Nakai). The camera and lens were attached to a self-leveling mount, which was oriented by corner pins on a tripod. This configuration ensured a consistent level positioning for the camera during image acquisition. The top of the lens was located 1.3 m above the ground and the camera was oriented such that the magnetic north was always located at the top of the photographs. Photographs were taken from 10 a.m. to 3 p.m. under the conditions of diffused skylight (i.e., overcast), with automatic exposure settings. Images were captured using a DMC-LX5 camera (Matsushita Electric Industrial Co., Ltd., Osaka, Japan) with a fisheye lens at the highest resolution (2736 × 2736 pixels). After the valid region is extracted, the image resolution is changed to 1678 × 1678. By limitation of the memory in our workstation, the 1000 images with 1678 × 1678 are still out of memory when training the U-NET model. In order to make the script run successfully, we resized the images to 1024 × 1024.
2.3. CHP Image Preprocessing
The image preprocessing module includes two steps, namely, the northing correction algorithm and valid region extraction.
2.3.1. Northing Correction Algorithm
From an ecological standpoint, the northing correction of fisheye images helps to ensure the azimuth consistency of canopy hemisphere images taken at different times, and this makes it easy to compare dynamic ecological parameters such as the GF and LAI, which is of great significance.
The algorithm consists of three steps, namely, red spot detection, region centroid calculation, and rotation angle calculation. The implementation details are given in Algorithm 1.
| Algorithm 1. Procedure for the Northing Correction. |
| Input: The valid region image f, the threshold T1, T2, and T3 of the red, green, and blue components (denoted as f1, f2, and f3). |
| Output: The image after correction |
| Begin |
1. For each pixel, DO
2. If (f1(x, y) > T1 and f2(x, y) < T2 and
f3(x, y) < T3) = false, then f1(x, y) = f2(x, y) = f3(x, y) = 0;
3. Perform open operation on f(x, y),
End
4. For each pixel, DO
5. If (f1 > T1 and f2 < T2 and f3 < T3), then count the horizontal and vertical coordinates and the total number of coordinates
6. Calculate the centroids Xc, Yc;
End
7. Determine the triangle vertex;
8. Calculate the side length of triangle;
9. Calculate the cosine of the triangle;
10. Calculate the arc cosine;
11. Radian converted to angle value;
12. Rotate the image according to the angle. |
| End |
2.3.2. Valid Region Extraction
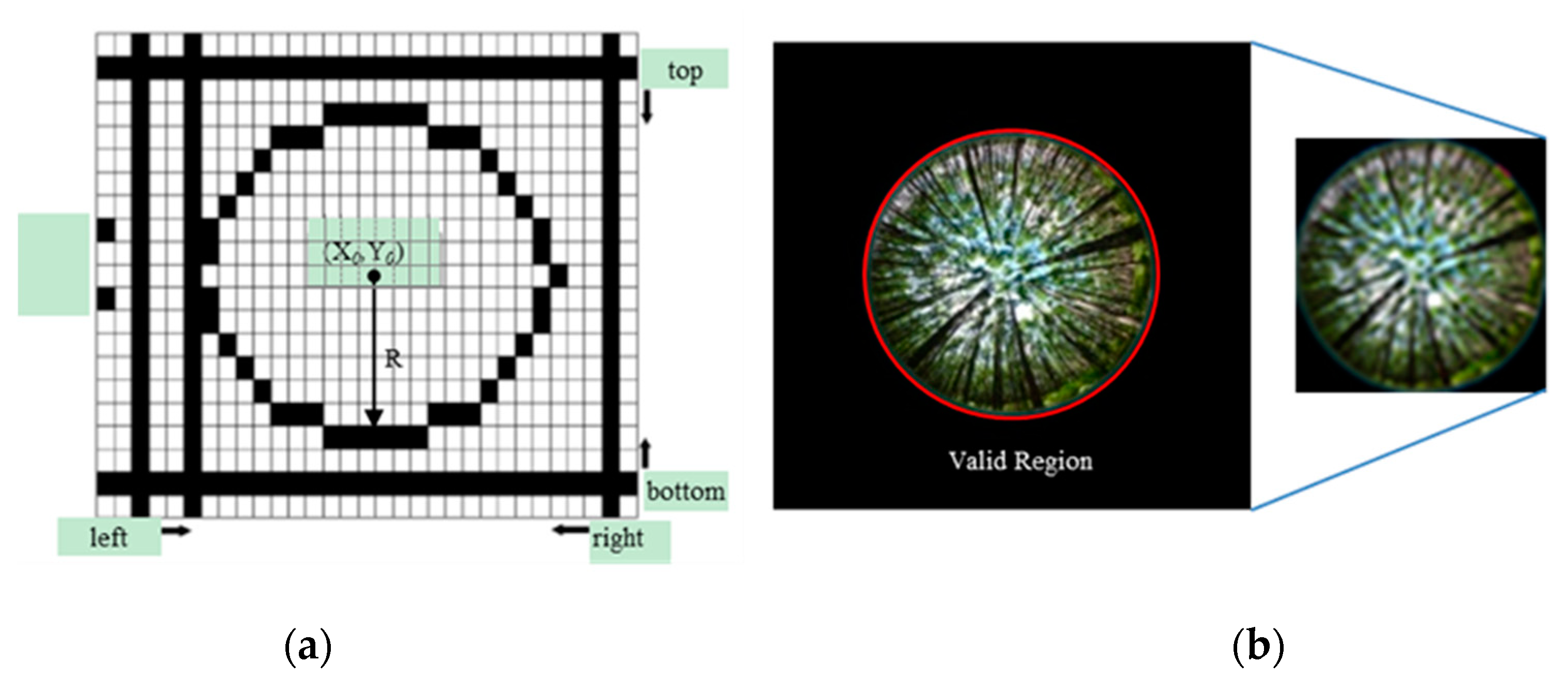
The forest CHP images captured by the fisheye lens have large low pixel value areas between the circular boundary and the image boundary. In order to reduce the memory usage and improve the data processing efficiency, the low pixel value region needs to be removed, and only the circular valid area containing the canopy is retained. Here, a scanning and cutting algorithm is used to extract valid regions [
20]. The principle of the scanning algorithm and the schematic of the valid region are shown in
Figure 4.
Since the CHP images are color images, they need to be converted to grayscale images before the scanning algorithm is used. The gray scale transformation formula is shown below.
where R, G, and B are the red, green, and blue components of the color canopy images, and L denotes the grayscale image converted from the color components.
The algorithm steps for the scanning method are shown in Algorithm 2.
| Algorithm 2. Procedure for the Valid Region Extraction. |
| Input: A DHP I and a threshold T; |
| Output: The valid region image Ivr; |
| Begin |
1. Convert I to a gray image L using Equation (1);
2. Determine the scanning direction (row Y or column X); |
| 3. Start scan; |
| 4. Compute intensity L of each pixel on the scan line; |
| 5. Compute maximum intensity difference Llim on the scan line; |
| 6. Compare Llim with T, if L lim > T in line 7, else return to line 3; |
| 7. Stop scan; |
| 8. Record the position of the scan line, denoted as X left, X right, Ytop, Ybottom; |
| 9. Compute the center X0, Y0 and the radius R of the valid region; |
| 10. Crop and output the Ivr. |
| End |
The output of the scanning algorithm is the valid circular image, which is prepared as an input to the next segmentation module.
2.4. CHP Image Segmentation
Image segmentation technology based on deep learning has attracted great attention from researchers in recent years. It has first been applied to segmentation tasks for natural scene images (Refer to photos of daily life taken by people with mobile phones and digital cameras) or medical images, and then gradually extended to the research field of botany or ecology [
21]; however, applications of deep learning techniques in these fields are immature. Botanists, ecologists, and computer vision experts need to transplant deep segmentation models into the ecology field and modify them to develop CHP image segmentation models. This paper develops a lightweight and efficient deep segmentation model that is suitable for use with hemispherical forest canopy images.
2.4.1. Data Preparation
- (1)
Data augmentation
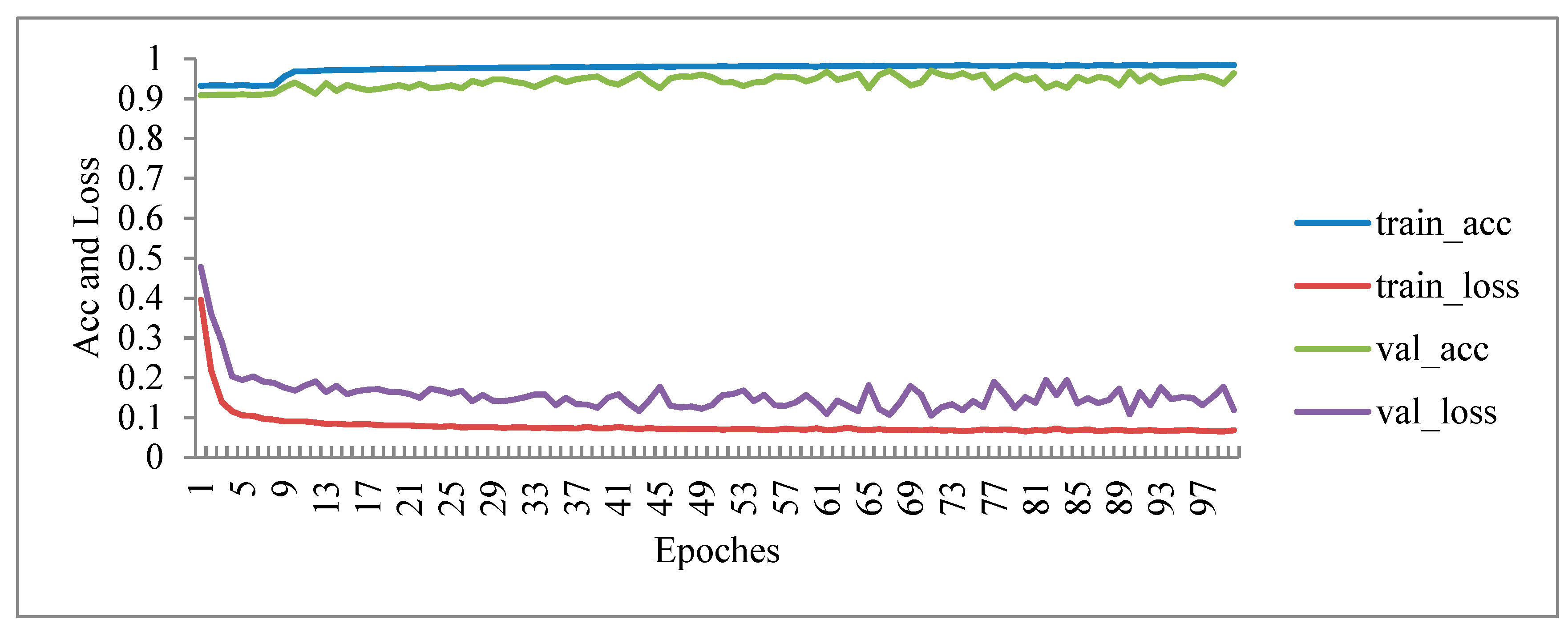
Deep learning typically requires a large quantity of data for training or else overfitting will occur, meaning that data augmentation is necessary. Generally speaking, our data sets are captured in limited scenes. However, our target application may exist in different conditions, such as in different directions, positions, zoom ratios, brightness, etc. We can use additional synthetic data to train a neural network to explain these situations. The data augmentation method used in this paper includes flipping, translation, rotation, and scaling. Augmentation was performed with the Keras deep learning API, and the number of augmented images was about 100,000 with a setting of 100 epochs (all samples in the data set are run once and called an epoch). The augmented images and the corresponding manual reference images pairs were fed to the U-net model for training.
- (2)
Parameters setting
A total of 1295 CHP images were selected after removing some images with direct sunlight. In the experiments, the training/validation/test sets were divided into sets of 1000/195/100 randomly. The TensorFlow framework was used with a Linux system, and the Habitat-Net method and our method used the same parameter settings. The parameters that were used are given as follows: Learning rate set to 0.001, batch size set to 2, and number of epochs set to 100. We used Adam as the optimizer and the training time was about 8 h. The workstation was configured with 2 NVIDIA Titan XP GPUs and the available RAM size as 24 GB. The fuzzy clustering method (FCM) parameter settings are given as follows: The maximum number of iterations was 25, the cluster number was 2, and the minimum improvement was 0.001.
The FCM, Otsu, and Ridler algorithms were implemented using MATLAB R2017b with a PC configured with a 3.0 GHz CPU and a 4 GB of RAM. We used WinSCANOPY 2003 to perform image analysis.
2.4.2. U-Net Architecture
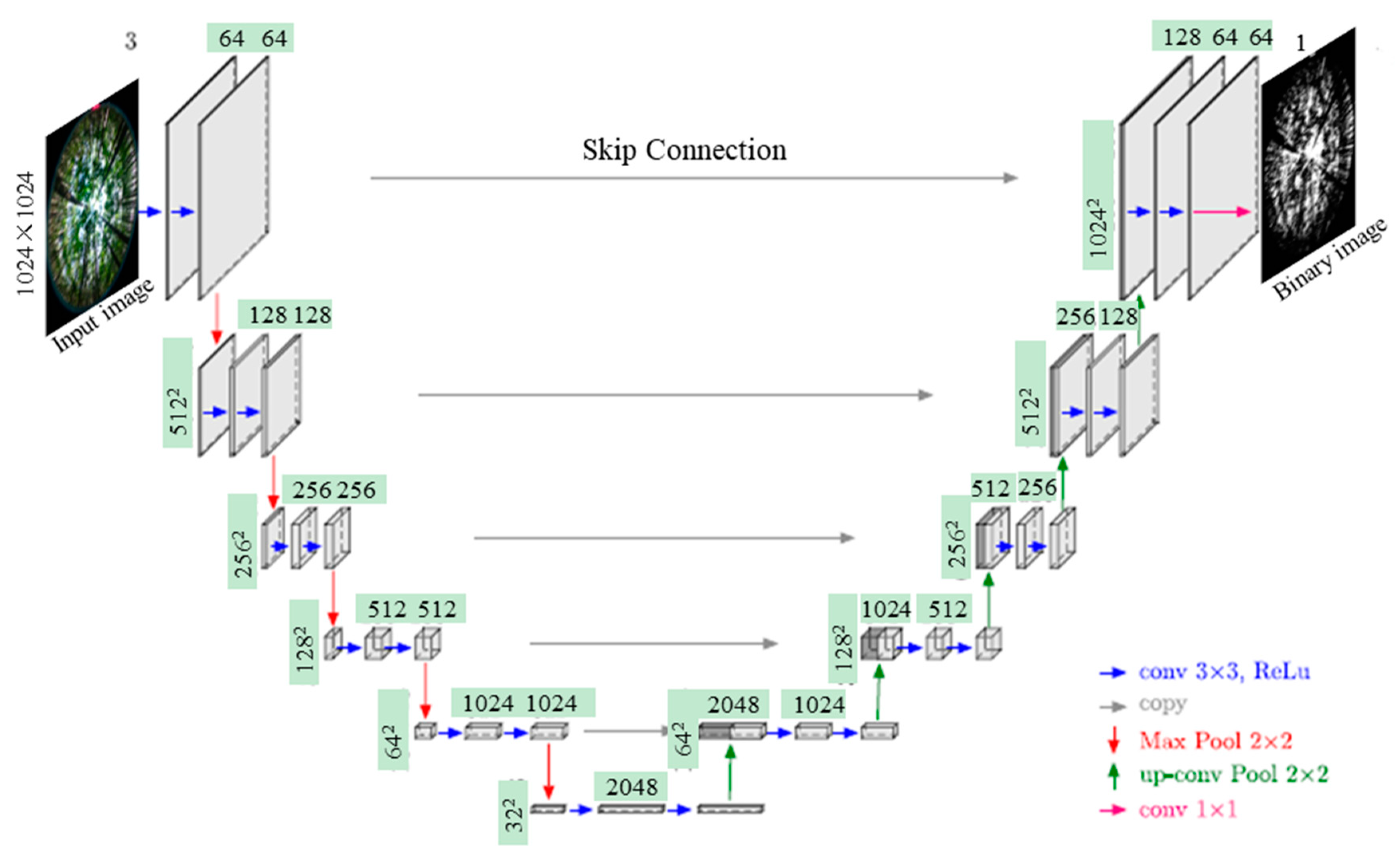
Compared with other convolutional neural networks, the U-Net network extracts features of the canopy image and transfers the location information of the features to the corresponding layer through a skip connection as to keep the location information of features in the image as much as possible. This has unique significance for the accurate segmentation of forest canopies and GF calculation. The U-Net network used in this paper was composed of 23 convolutional layers, 5 pooling layers, and 5 upsampling layers, as shown in
Figure 5. The most primitive U-Net model was first proposed by Ronneberger et al. in 2015, and was applied to the segmentation of biomedical images. The model is referred to as “U-Net” because its architecture is similar to a U-shaped distribution. It is a lightweight deep convolutional neural network (CNN) segmentation model.
The U-Net model consists of two parts, namely, a contraction path (left) and an expansion path (right). The network does not have a fully connected layer, where only a convolutional layer is used, and each convolutional layer is followed by a rectified linear units (Relu) activation function layer and then a pooling layer. The U-Net architecture is symmetrical and a skip connection is used. The skip connection helps restore the information loss caused by downsampling and can preserve finer image features. The network structure is also an encoder–decoder structure.
After the input images are downsampled 5 times and upsampled 5 times, the high-level semantic feature map obtained by the encoder is restored to the resolution of the original image, and the final image segmentation result is obtained.
2.5. Other Segmentation Methods
The Otsu traditional threshold method is a global automatic threshold segmentation method based on the maximum interclass variance, and the Ridler method is a segmentation algorithm that iteratively seeks the optimal threshold. FCM is an unsupervised machine learning method which uses a membership function to group canopy images into two categories, namely, sky and non-sky. WinSCANOPY also uses an automatic threshold method to segment hemispherical images. It calculates the proportion of the sky that can be observed upward from the bottom of the forest canopy. A value of 0 means that the sky cannot be seen at all (full covered), a value of 1 means the full sky, and values of 0–1 means that part of the sky is covered by leaves. The software uses the inverse program of the gap fraction to split the canopy image into several sectors or grids according to the partition number of the zenith angle and azimuth angle defined by the user, and automatically and quickly counts the pixels of the visible sky in each sector. Thus, the visible sky ratio (direct sunlight transmission coefficient) of the sector can be analyzed. The Habitat-Net and U-Net methods are both supervised machine learning and deep learning methods. Habitat-Net modified the original network structure and reduced the number of U-Net channels by a factor of two, making it more suitable for small-size image segmentation; however, the resolution of the CHP images is high (2736 × 2736), and a deeper and wider network architecture is consequently required.
2.6. Metrics of Segmentation Performance Evaluation
The manual reference images of the preprocessed canopy images were produced manually. We first used a simple threshold method to perform coarse segmentation for the canopy images and then used the overlay function of the ImageJ software package to manually revise the details for the canopy image. For example, we manually darkened the reflective regions of tree trunks, finely tuned the mixing area of the foliage and the sky, and bridged thin branches broken by strong light. This process is very time consuming. Under the supervision of the ecologist professor Zhihu Sun, it took 4 students 4 weeks to find the manual reference images for all of the images used here.
This paper uses the Dice similarity coefficient (DSC) and accuracy to evaluate the segmentation results. The DSC is a measure of the similarity between two sets. It is used in the field of image segmentation to measure the similarity between the network segmentation result and the gold standard mask. The DSC is defined as follows [
22]:
where
represents the manual reference images and
represents the segmented results. The numerator of the Equation (2) represents the intersection of two sets, and represents the correct area predicted by the algorithm, denoted by TP. When the prediction is completely correct, the two regions will overlap, and Dice is equal to 1. Its value is from 0 to 1.
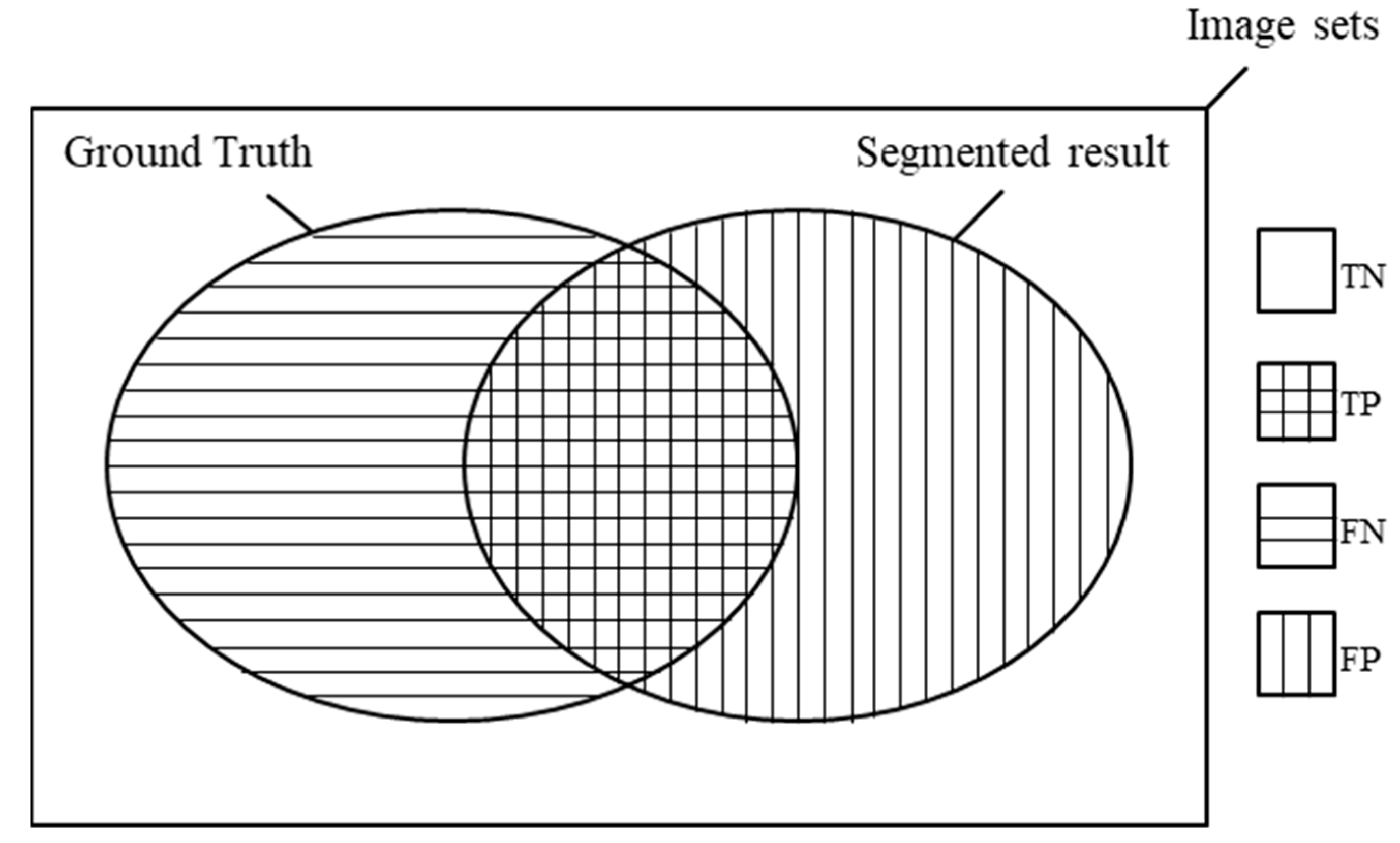
The accuracy index is defined as follows, and it is performed at the pixel level [
23]:
where TP is true positive and denotes that the predicted result is sky and the manual reference images is sky; FP is false positive, denoting that the predicted result is sky and the manual reference images are foliage; TN is true negative, denoting that the predicted result is foliage and the manual reference images are foliage; and FN is false negative, denoting that the predicted result is foliage and the manual reference images are sky. It is illustrated in
Figure 6.
The DSC refers to the proportion of black pixels, such as branches and canopy, that are correctly predicted to the entire set of image pixels. Accuracy refers to the ratio of the predicted correct black pixels, such as branch and canopy pixels, and the white pixels of the sky to the sum of the pixels of the two images, i.e., the manual reference images and the segmented images.
4. Discussion
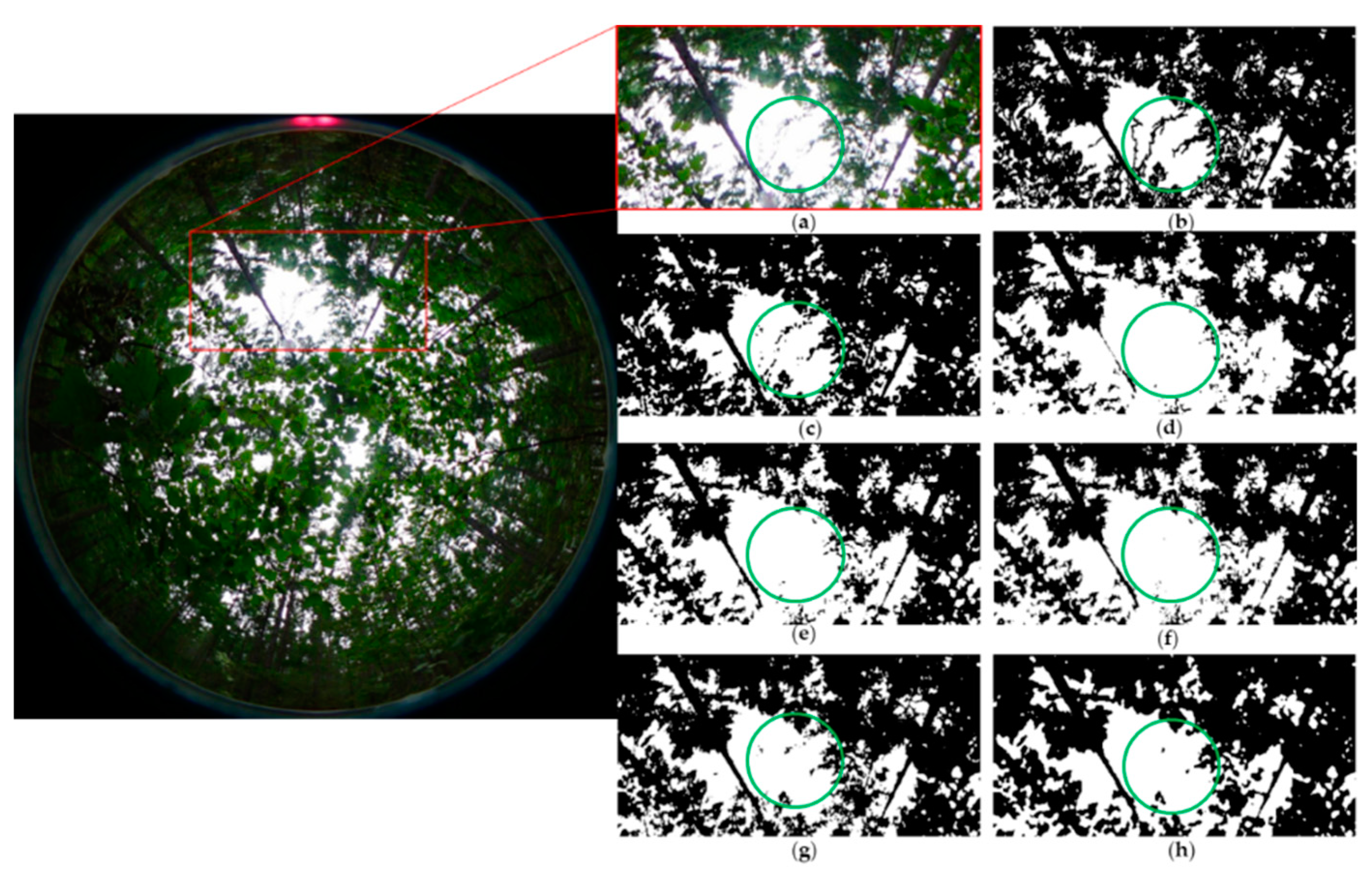
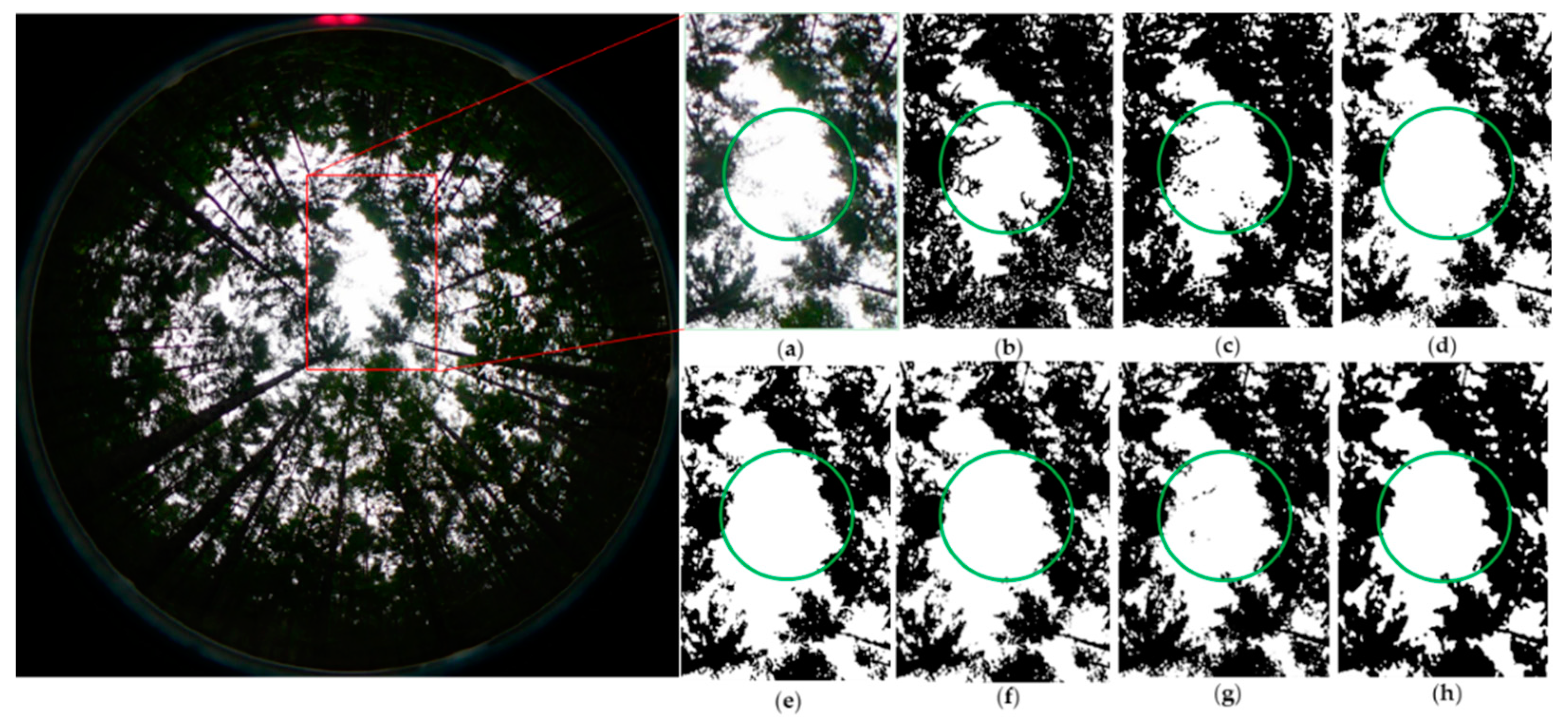
When traditional threshold segmentation methods (Otsu and Ridler methods) are applied to canopy images they require neither a training model nor manual reference images, which saves a lot of time; however, the segmentation accuracies of these methods are not high, and their robustness is poor. The segmentation results are good for some images, but they will be poor when the image quality has deteriorated. The FCM algorithm uses the degree of membership to determine the degree of clustering for each data point, which is an improvement over the traditional hard clustering algorithm. It is sensitive to the initial clustering center and needs to manually determine the number of clusters, which makes it easy to fall into a local optimal solution. The presented method based on deep learning takes more time to train the model (for 100 epochs, the training time is about 8 h) and find the manual reference images; however, since the training dataset contains as many canopy images captured under various light environments as possible, the generalization ability of the segmentation model based on deep learning is better. The WinSCANOPY software package is a professional software package that has been specially developed for research in the field of forestry and ecology. It is used for processing hemispherical forest canopy images and is a widely accepted tool in the field of forestry ecology; however, the operation of the software is not convenient and the image preprocessing requires human–computer interaction, and it does not have the ability of automatic segmentation and calculation. Habitat-Net is also a segmentation algorithm based on deep learning, but the model only contains a segmentation module and no preprocessing module, so it cannot be used to process canopy hemisphere images. The U-Net architecture-based canopy hemisphere image segmentation method proposed in this paper is composed of two parts, namely, a preprocessing module and a segmentation module. The method can provide end-to-end automatic processing and is a fully automatic image segmentation algorithm. The segmentation process does not require manual intervention and can achieve fast and accurate segmentation results for CHP images.
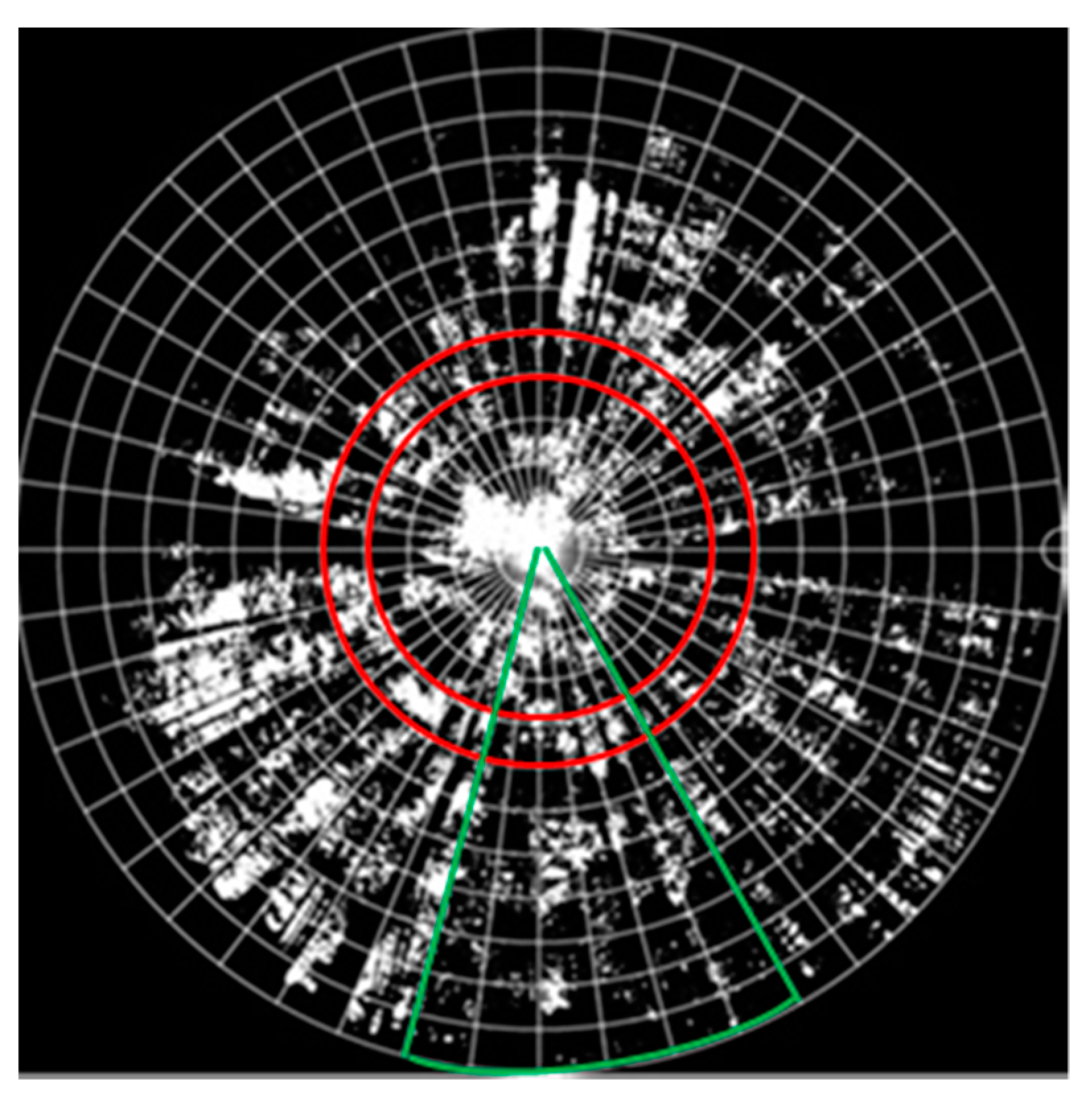
Our method also has limitations. One of the limitations is that producing the manual reference images is time consuming and laborious. As the size of the canopy hemisphere image is large (2736 × 2736), and the boundaries between the sky and the vegetation are blurred, it is difficult for human vision to distinguish them, and it will take a large amount of time to delineate the sky and vegetation pixels manually. To solve this problem, we can adopt an alternative training strategy based on image patches. That is, the canopy hemisphere image can be divided into subregions (sectoral or circular regions) according to the symmetry axis of the image, as shown in
Figure 12. The region surrounded by the green line is a sector subregion, and the two red circles form a ring. The circular image is divided into sky pixels (presented in white color) and vegetation pixels (presented in black color), that is, the sky and vegetation are classified as two categories. If we only train the image patches (sectors or rings), this can greatly reduce the time spent finding the manual reference images.
The second limitation is that the generalization ability of our method still needs to be improved. Generally speaking, it is recommended that hemispherical canopy images are taken in dawn, twilight, or overcast conditions [
24,
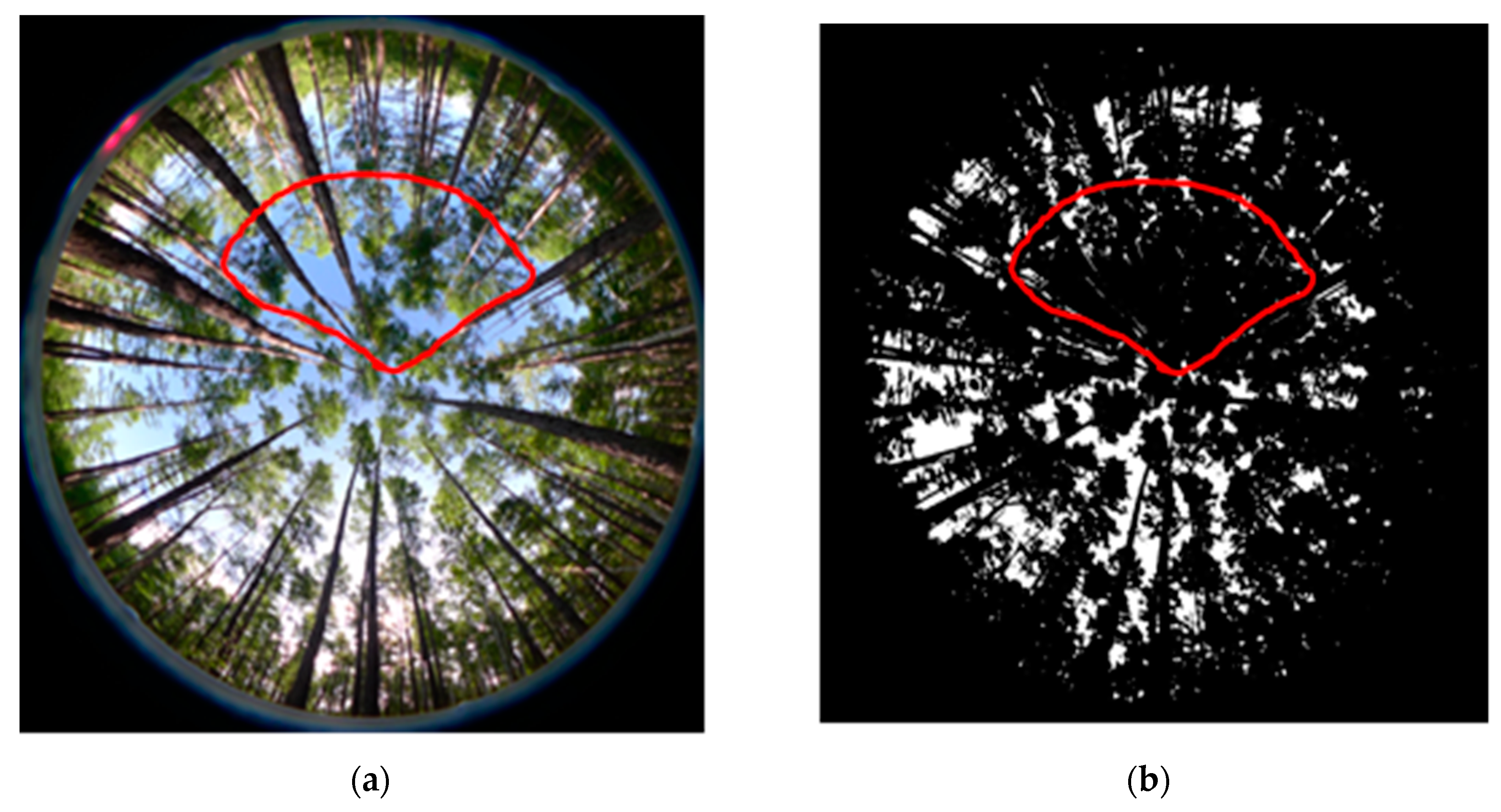
25]. Unfortunately, some of the data we obtained were collected under sunny or cloudy conditions, and the acquired image quality was not ideal. For this reason, when performing the algorithm experiments, we removed all data with direct sunlight; however, for the canopy images with a blue sky background, our method provides incorrect segmentation results, where the blue sky is wrongly divided into vegetation, as shown in
Figure 13. Although, this image was taken from another data set (which captured in 2014) and was not included in our experiments. The blue sky in the area surrounded by the red line was identified as vegetation (shown in black, see
Figure 13b). The reason for this may be that our training dataset contained few images with blue sky, which has affected the generalization ability of the model. In fact, from an ecological perspective, the CHP images should be taken in overcast conditions, and images with blue sky are not suitable.
In addition, the main research objects of this paper were coniferous forests and mixed forests. These two types of canopy hemisphere images often contain small gaps (the light-transmitting part between the branches and leaves) as the small foliage and leaves are weakly contrasted against the sky background, where the identification of these small gaps thus belongs to small object segmentation. The U-Net model has poor segmentation performance for small object segmentation [
21]. Subsequent research can attempt to use R-CNN mask to segment canopy hemisphere images.
Another factor that affects the performance of our method is the exposure mode. The auto exposure mode was used in our experiments, because this setting is convenient and can save a lot of data collection time. However, some research suggests manual exposure mode for hemispherical data collection [
24,
25]. Using auto exposure as a reference, the lower exposure is suitable for dense canopies, and a higher exposure is suitable for sparse canopies. In future studies, we will try to use the manual mode.
The forest canopy image segmentation results can be used to calculate the GF of the canopy. These GF values can be combined with different canopy models to provide LAI values. The LAI is one of the most important parameters for describing the characteristics of forest canopy structure, and it is also an important factor explaining differences in net primary productivity above the ground. The LAI of the canopy determines the light, temperature, and humidity in a forest, thereby affecting the balance of carbon, water, and energy. It is usually used to characterize the structure and functional characteristics of the forest ecosystem. Overall, the canopy hemisphere image segmentation method proposed in this paper is of great significance for the accurate estimation of forest LAI values and provides technical support for forest ecology research.
5. Conclusions
This paper has proposed a new method for forest CHP segmentation based on deep learning technology. The method includes three steps, namely, northing correction, valid region extraction, and canopy images segmentation. This method takes the original CHP image as an input and outputs canopy image segmentation results. The whole process of image processing does not require manual intervention and is an end-to-end and fully automatic method. Through the experiments with CHP images of Korean pine and mixed forests, our method achieved a DSC of 89.20% and an accuracy of 98.73% for CHP segmentation. Compared with the Habitat-Net model, the WinSCANOPY professional software, a clustering method, and traditional threshold methods (i.e., the Otsu and Ridler methods), our method achieved the best segmentation results. It only requires about 1 s for taking the original canopy images (2736 × 2736) and outputting the binary segmentation results, and the algorithm has been shown to be efficient. This method can support the estimation of forest canopy GF and LAI values.

 ,
, 














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}