
A Novel Control Strategy for Hydraulic Turbines to Consider Both Primary Frequency Regulation and Ultra-Low Frequency Oscillation Suppression

Abstract
:1. Introduction
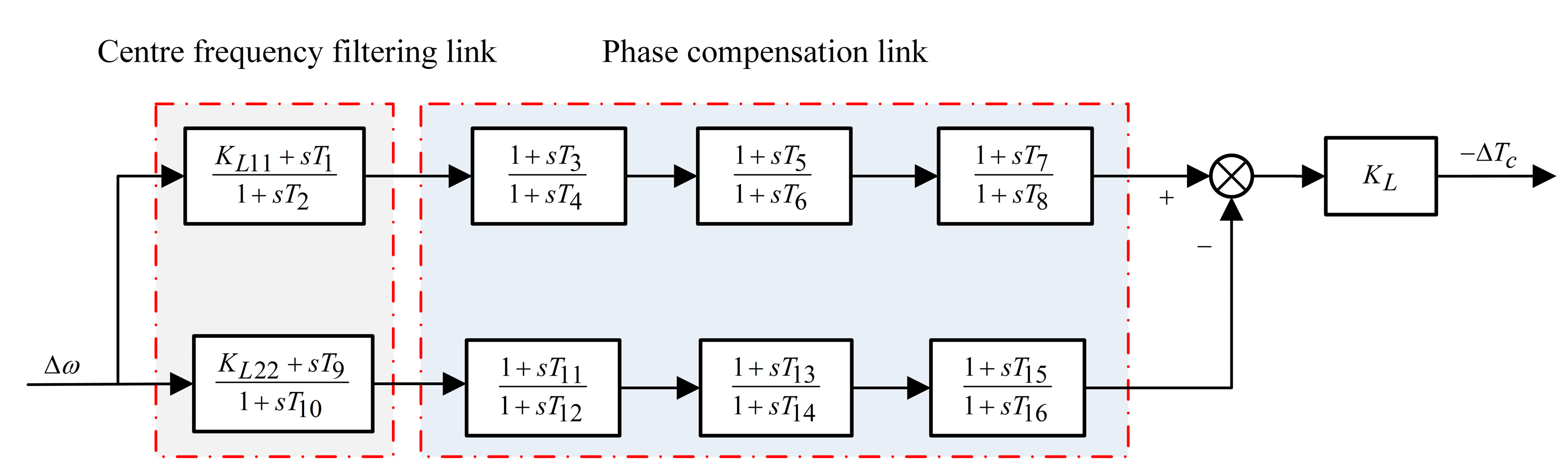
- Building upon the analysis of both the damping and the phase characteristics of the governor, a center-frequency-structured governor-side power system stabilizer is proposed. Additionally, the method for setting the parameters of the center filter is provided.
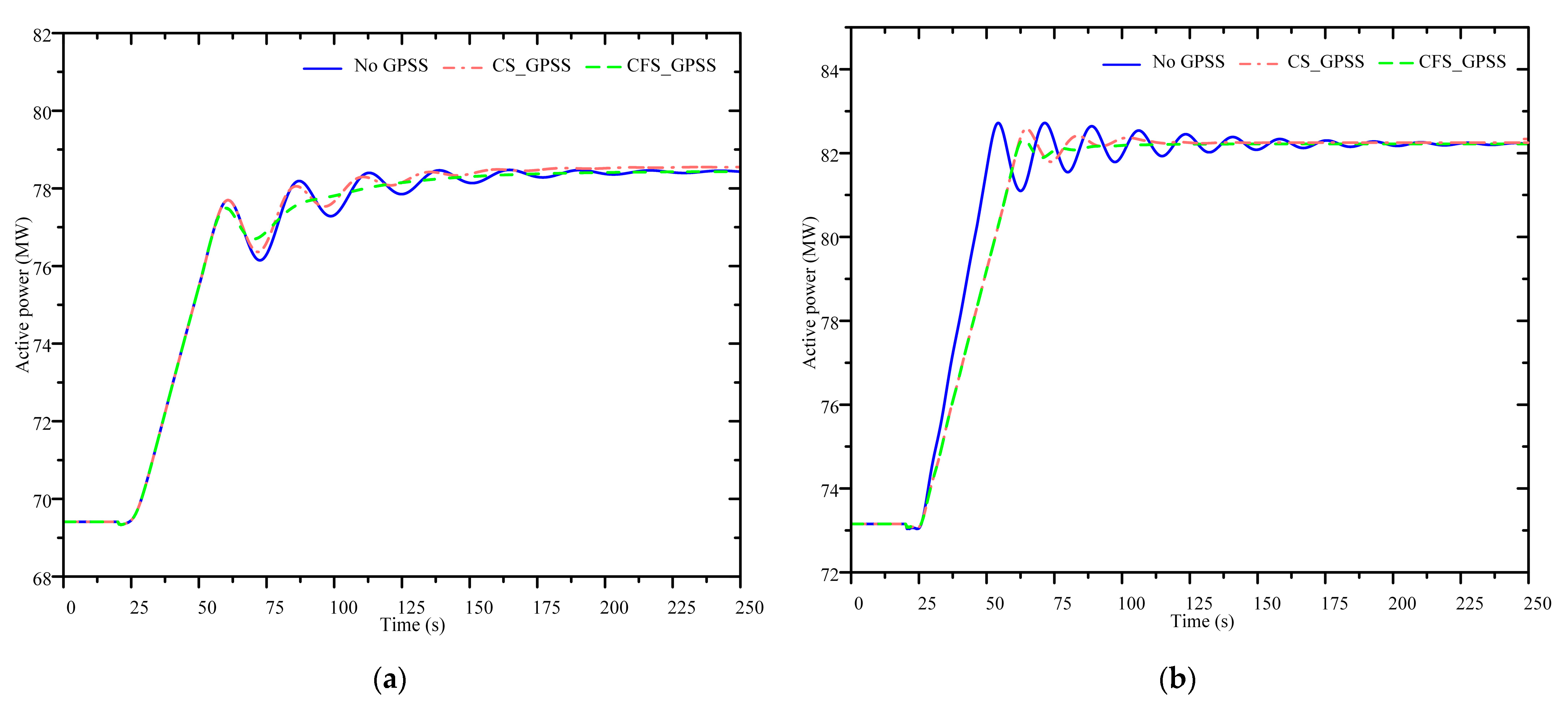
- The oscillation suppression and PFR performance between the CFS_GPSS and the CS_GPSS are compared under three operating conditions with frequency shifts. The simulation results demonstrate the effectiveness and robustness of the CFS_GPSS.
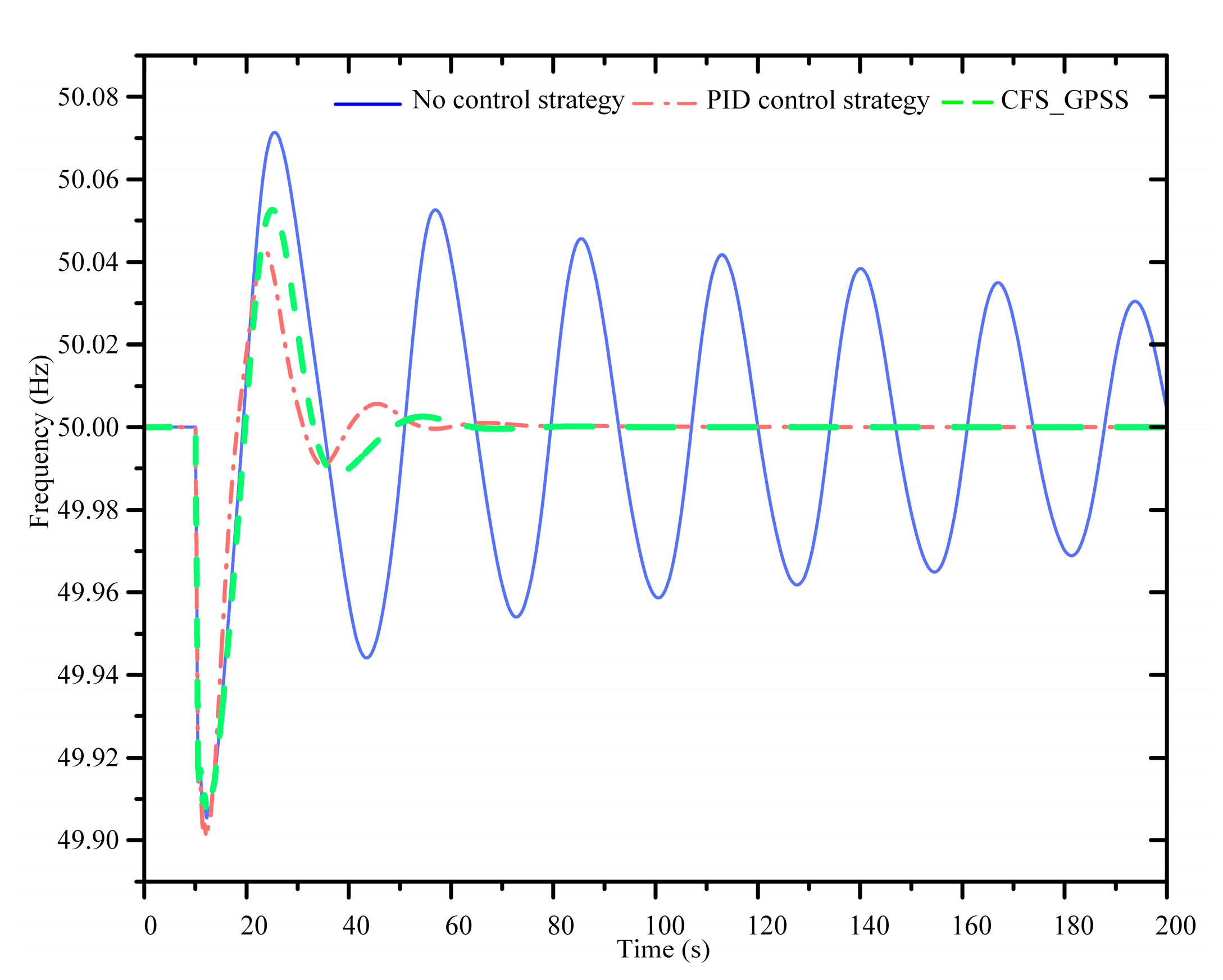
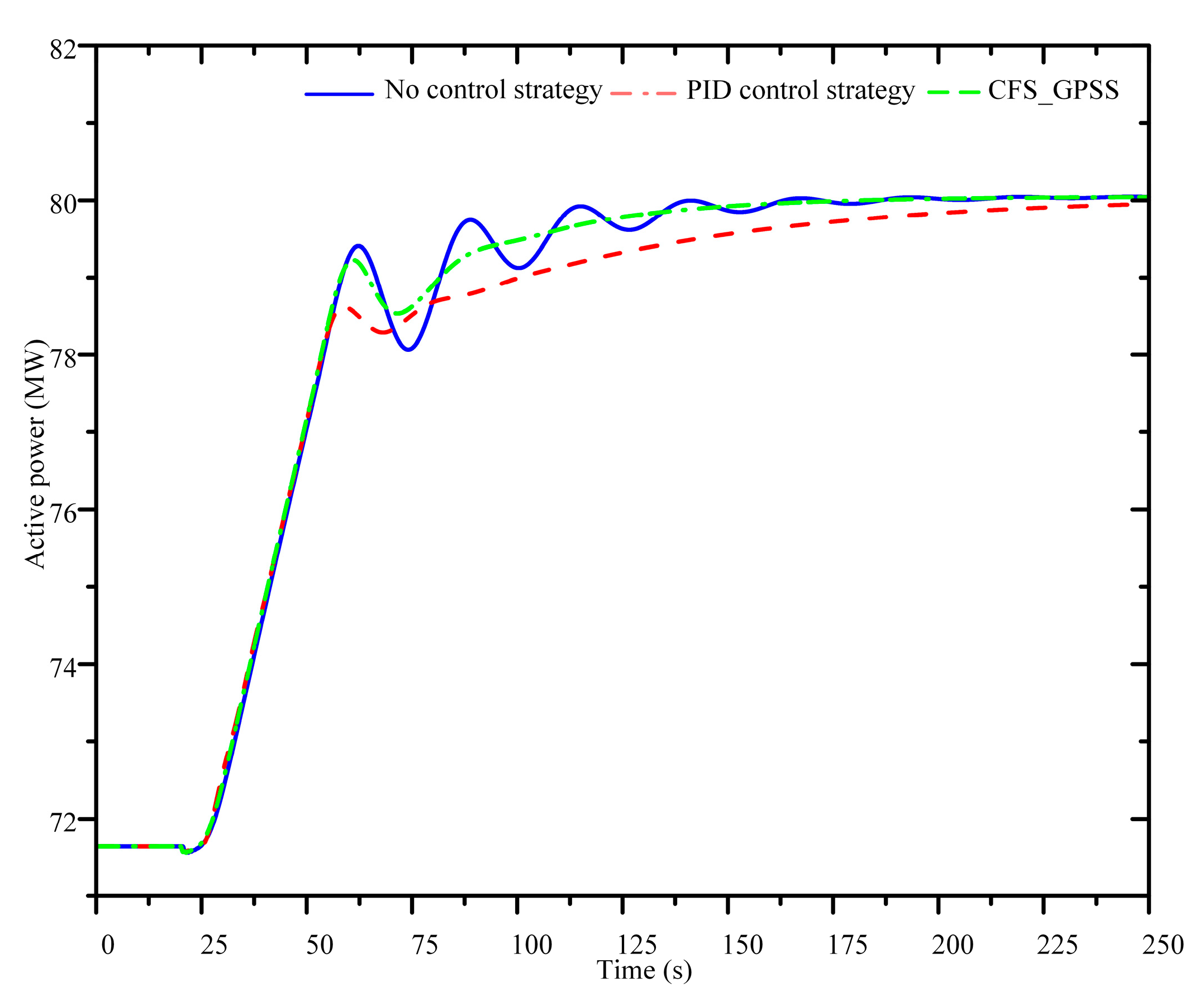
- It is demonstrated for the first time that the CFS_GPSS has better frequency regulation performance than the PID parameter optimization method while having similar oscillation suppression effects.
2. Analysis of ULFO Mechanism
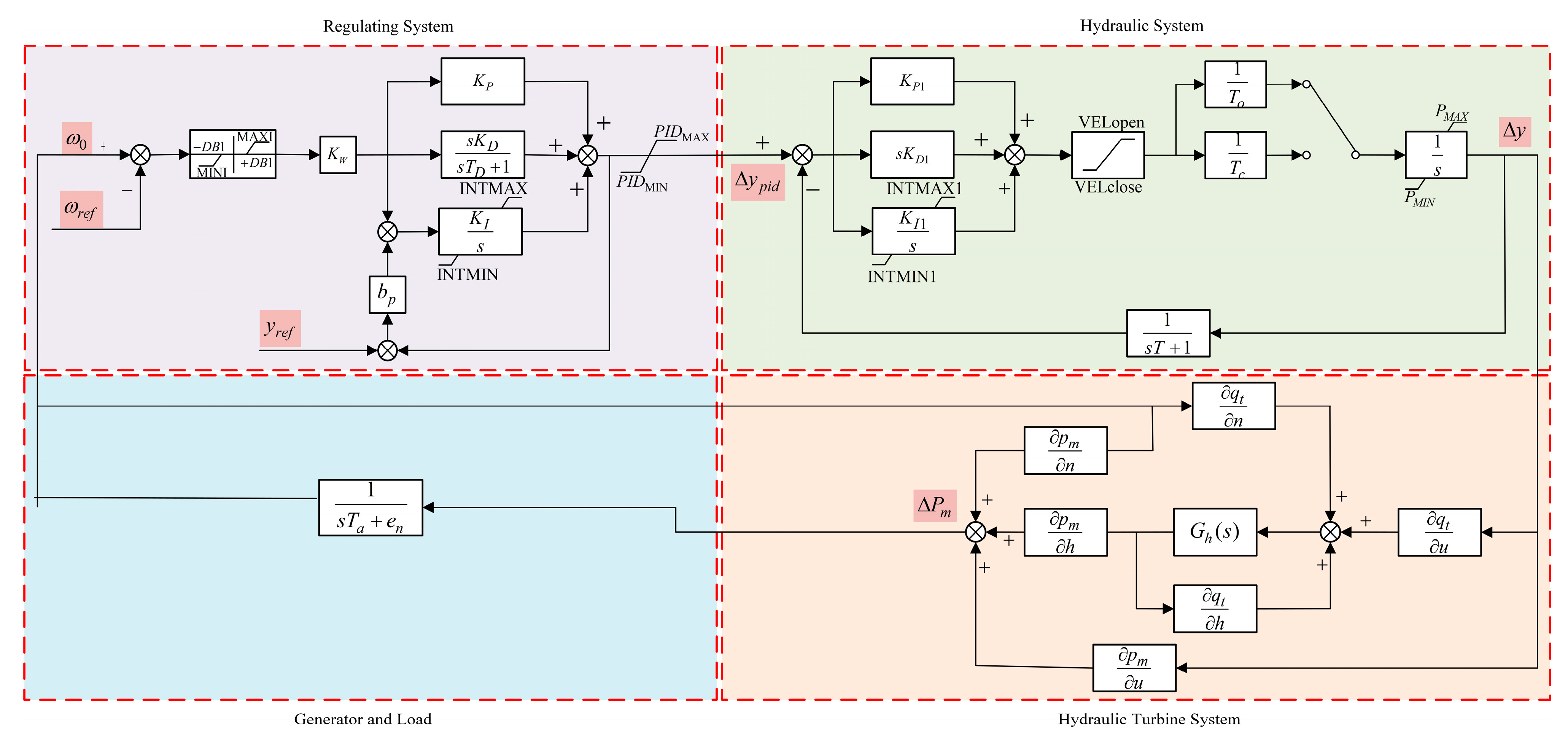
2.1. Theoretical Model of Hydropower System
2.1.1. Regulating System
2.1.2. Hydraulic System
2.1.3. Hydraulic Turbine System
2.1.4. Generator and Load System
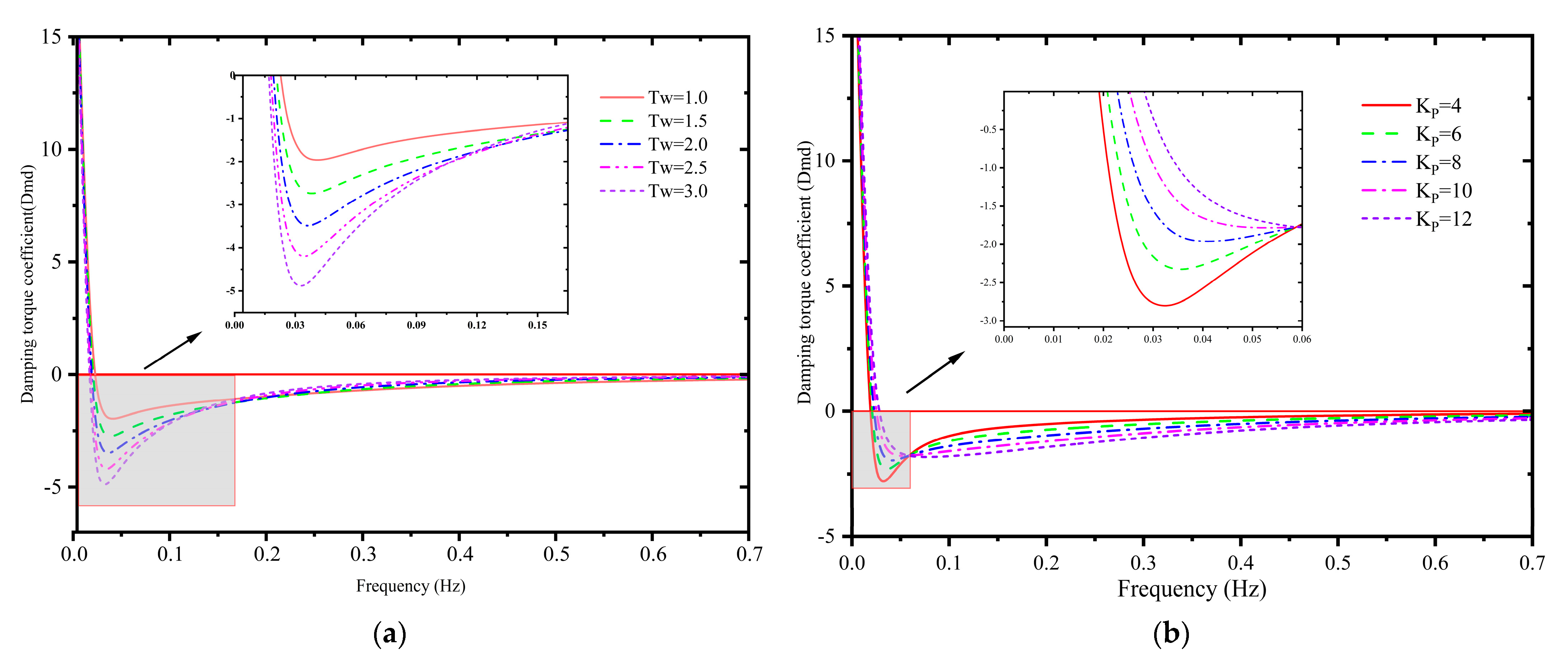
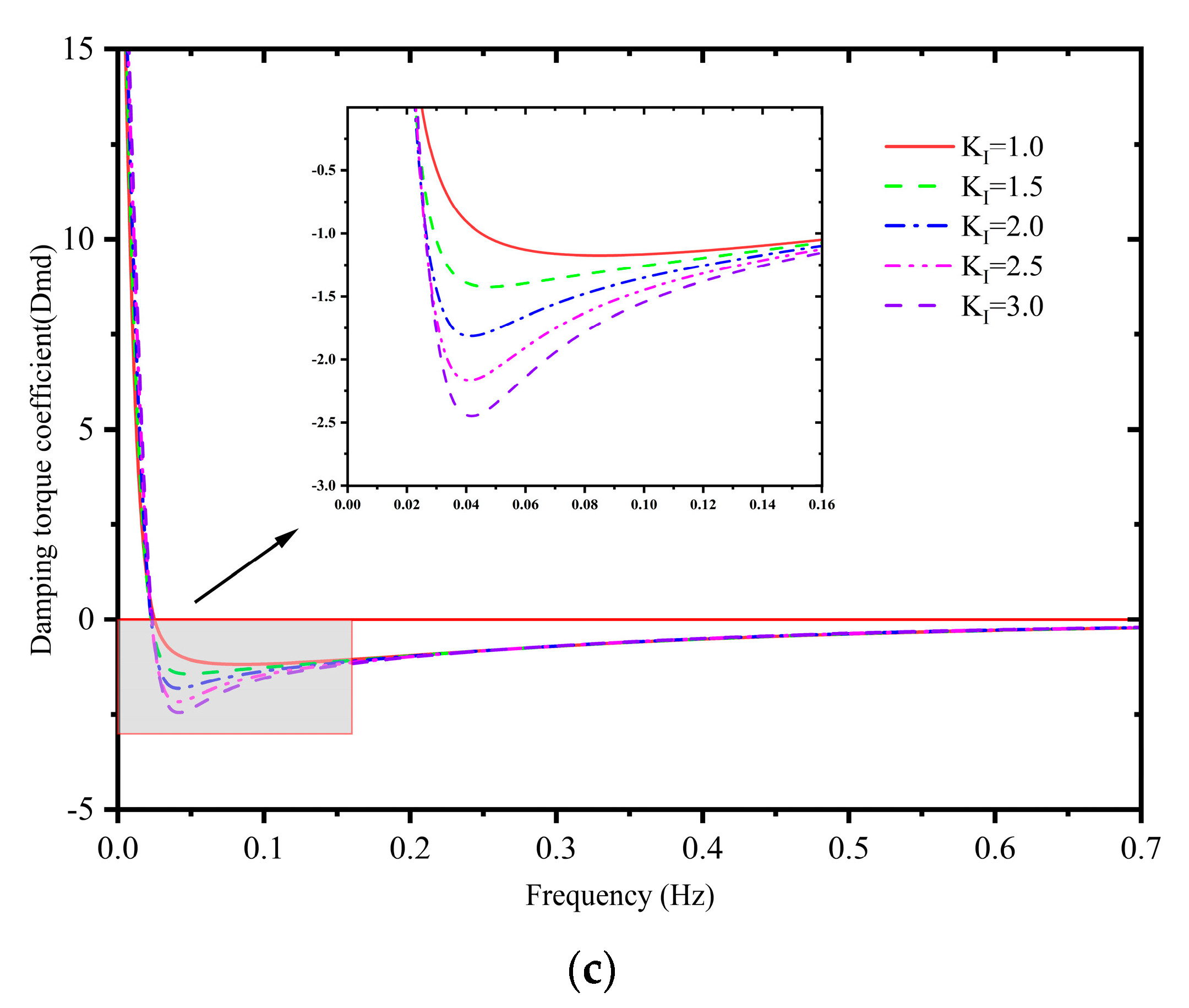
2.2. Damping and Phase Characterization of Speed Regulation System
2.2.1. Negative Damping Characteristics of Speed Control System
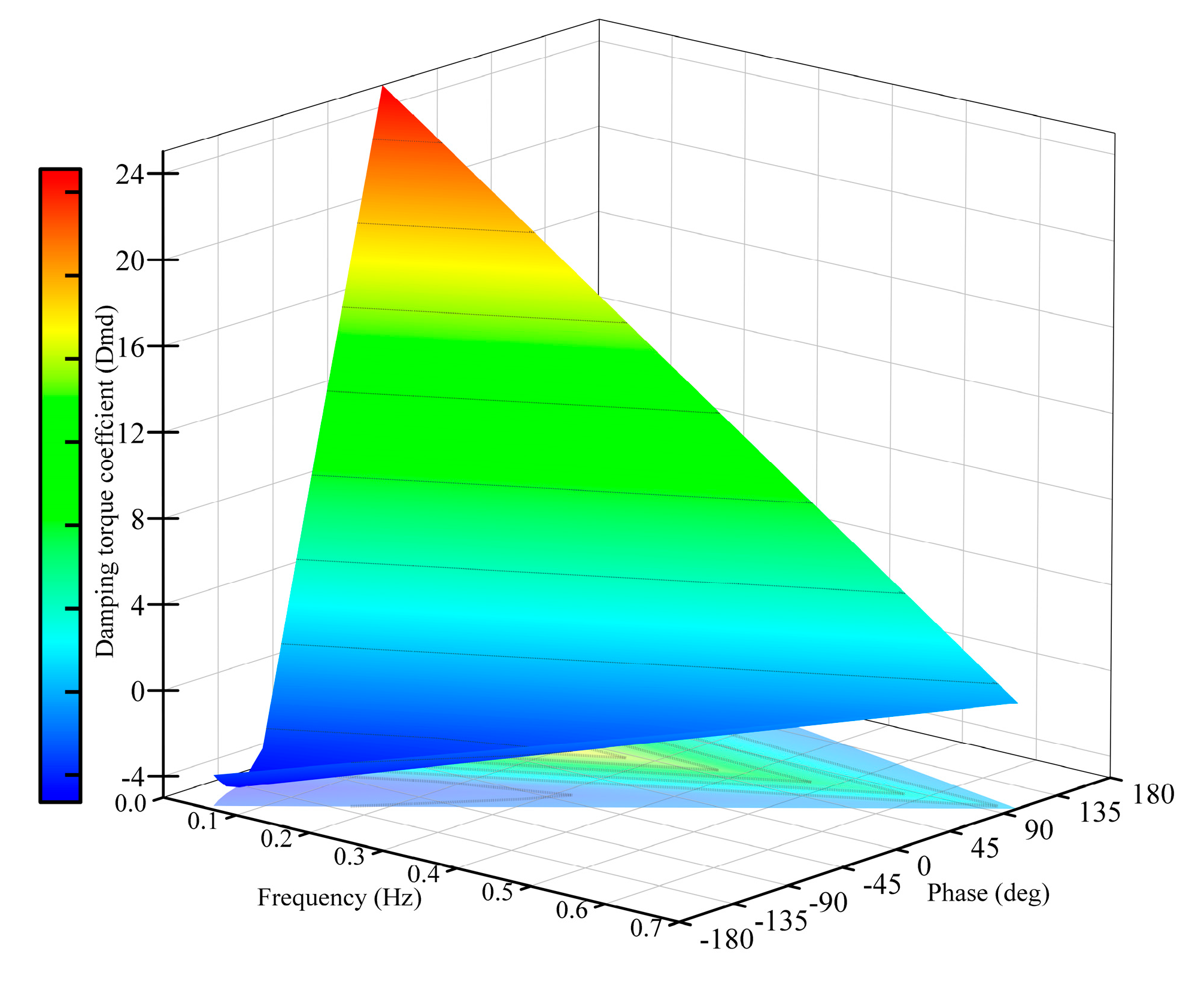
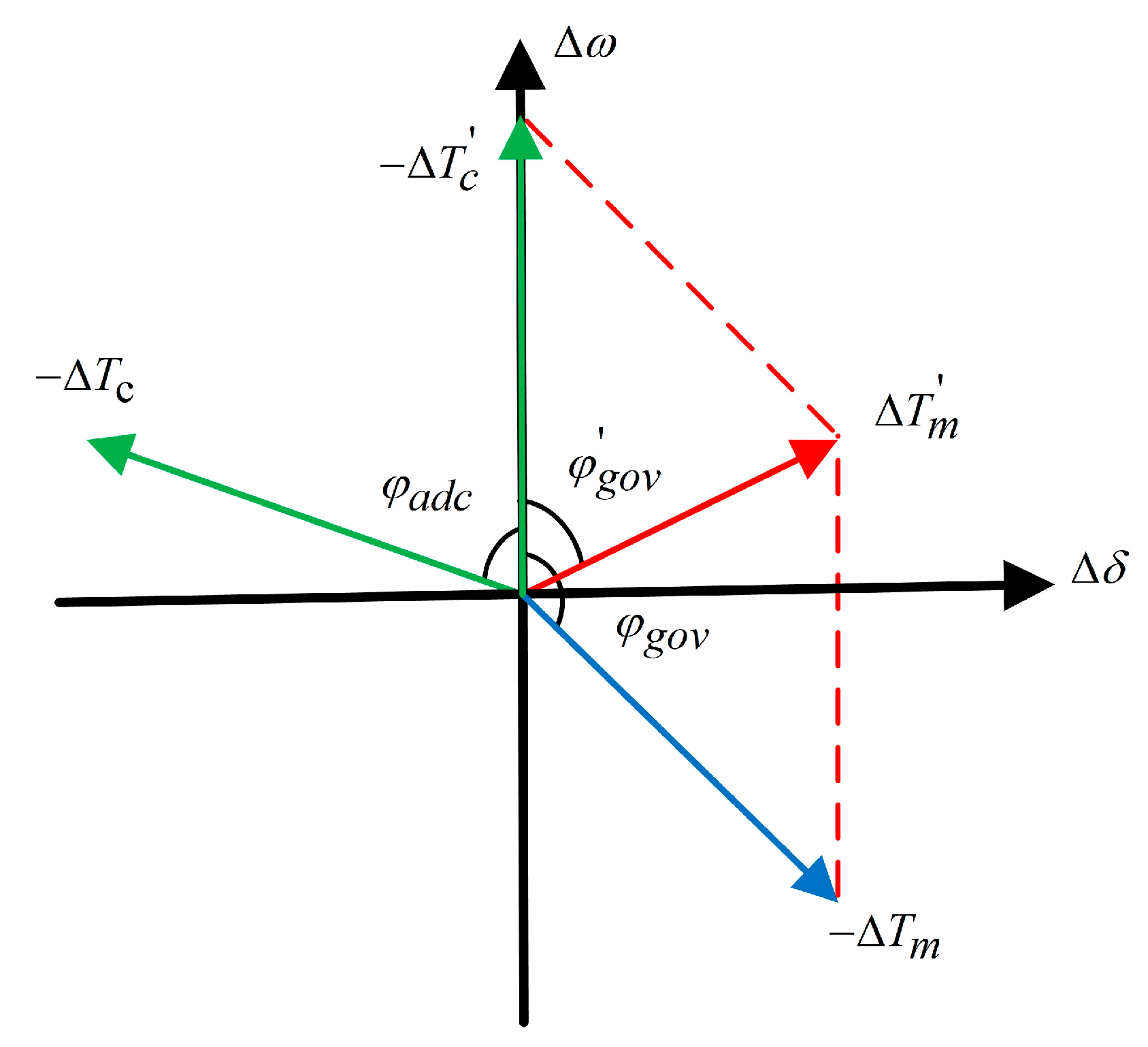
2.2.2. Governor Phase Characteristics
3. Additional Damping Controller Structure and Parameter Design
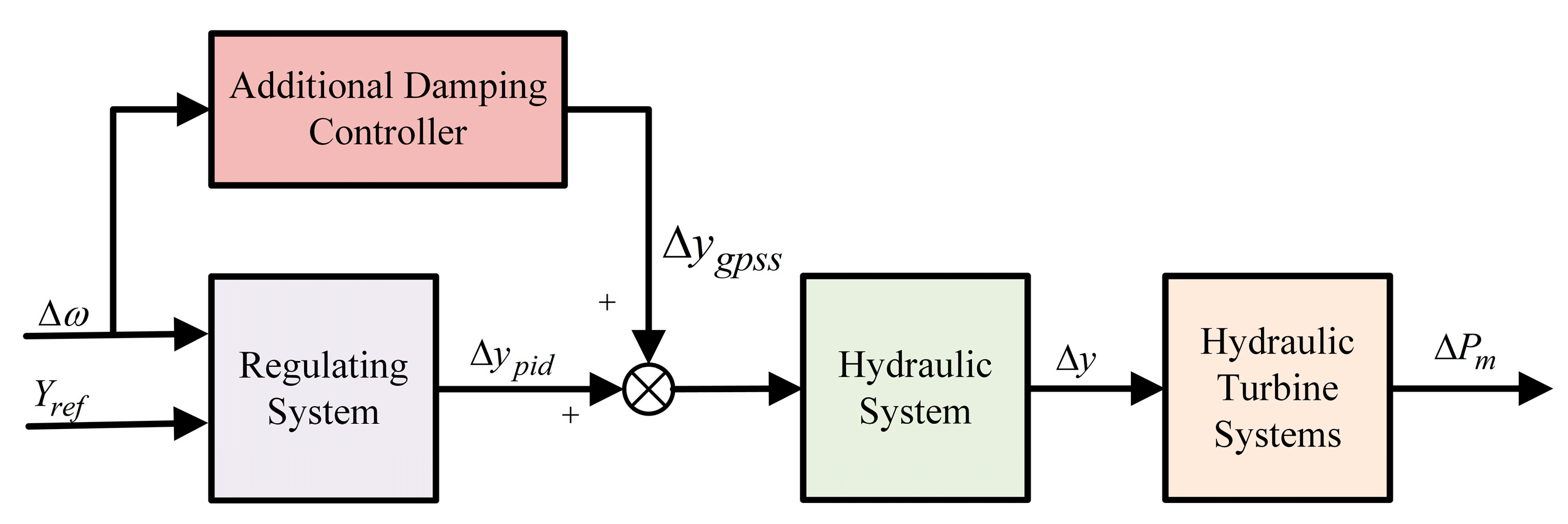
3.1. Design Principle
3.2. Structure and Parameter Design
3.3. Performance Analysis
- (a)
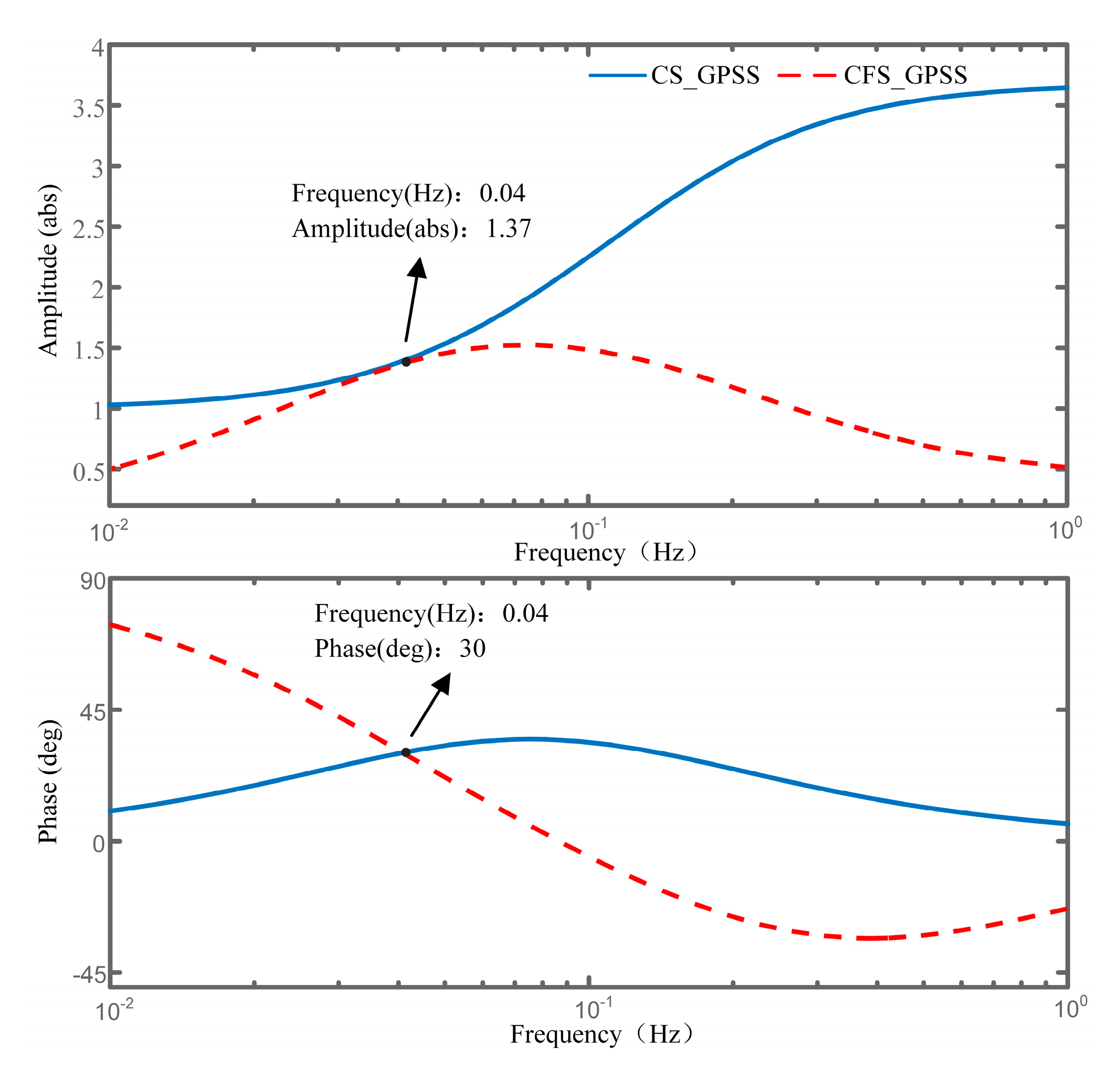
- In comparison to the CS_GPSS, the CFS_GPSS can compensate for larger phase angles within a narrower frequency range centered around the target frequency. This characteristic effectively enhances the damping characteristics of this specific frequency band.
- (b)
- Beyond the frequency range requiring phase compensation, the CS_GPSS tends to produce a larger amplitude, potentially introducing errors in system compensation. In contrast, the CFS_GPSS exerts a minimal impact on frequencies outside the ultra-low-frequency range due to its significantly reduced gain.
4. Numerical Simulations and Analysis
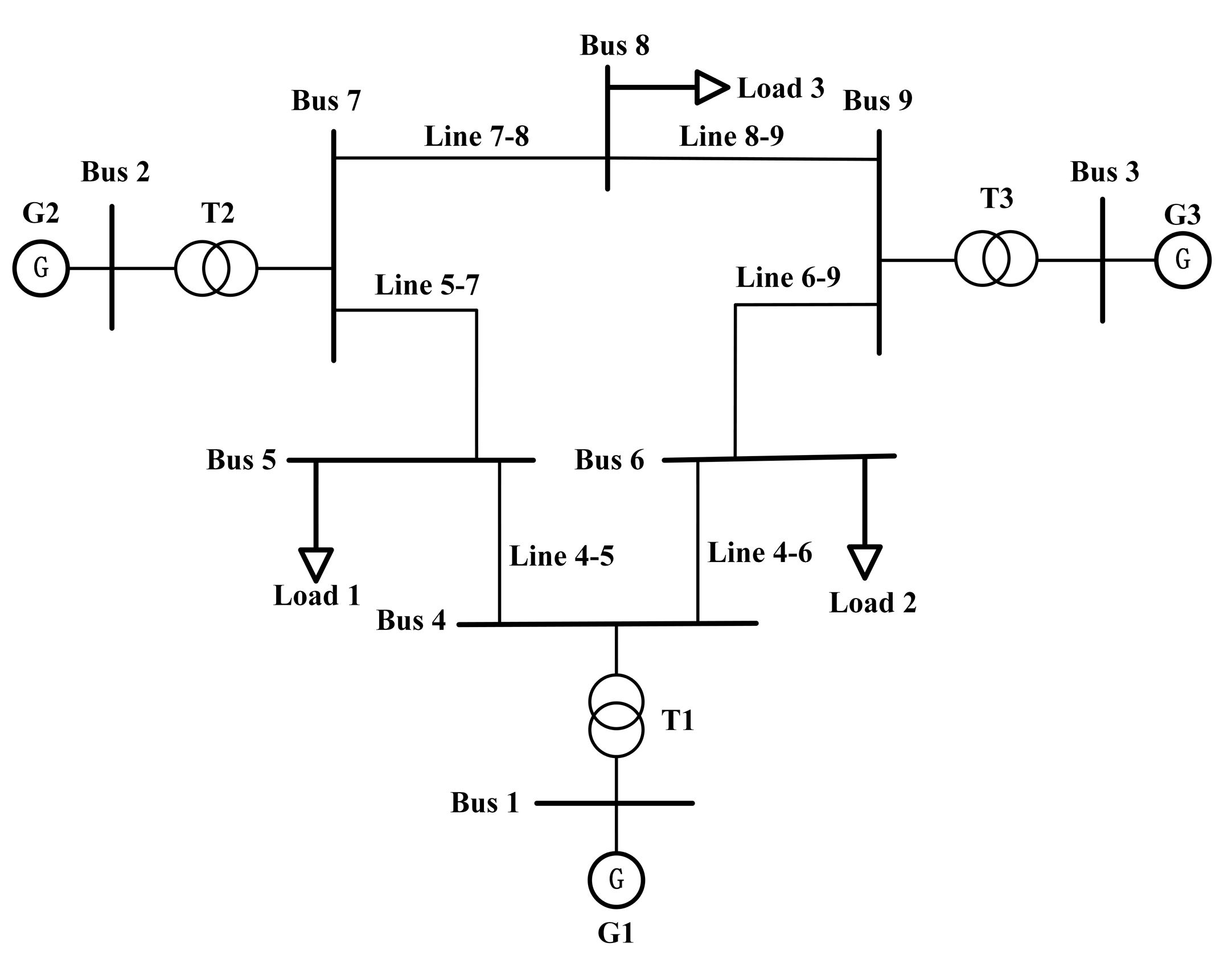
4.1. Simulation Environment
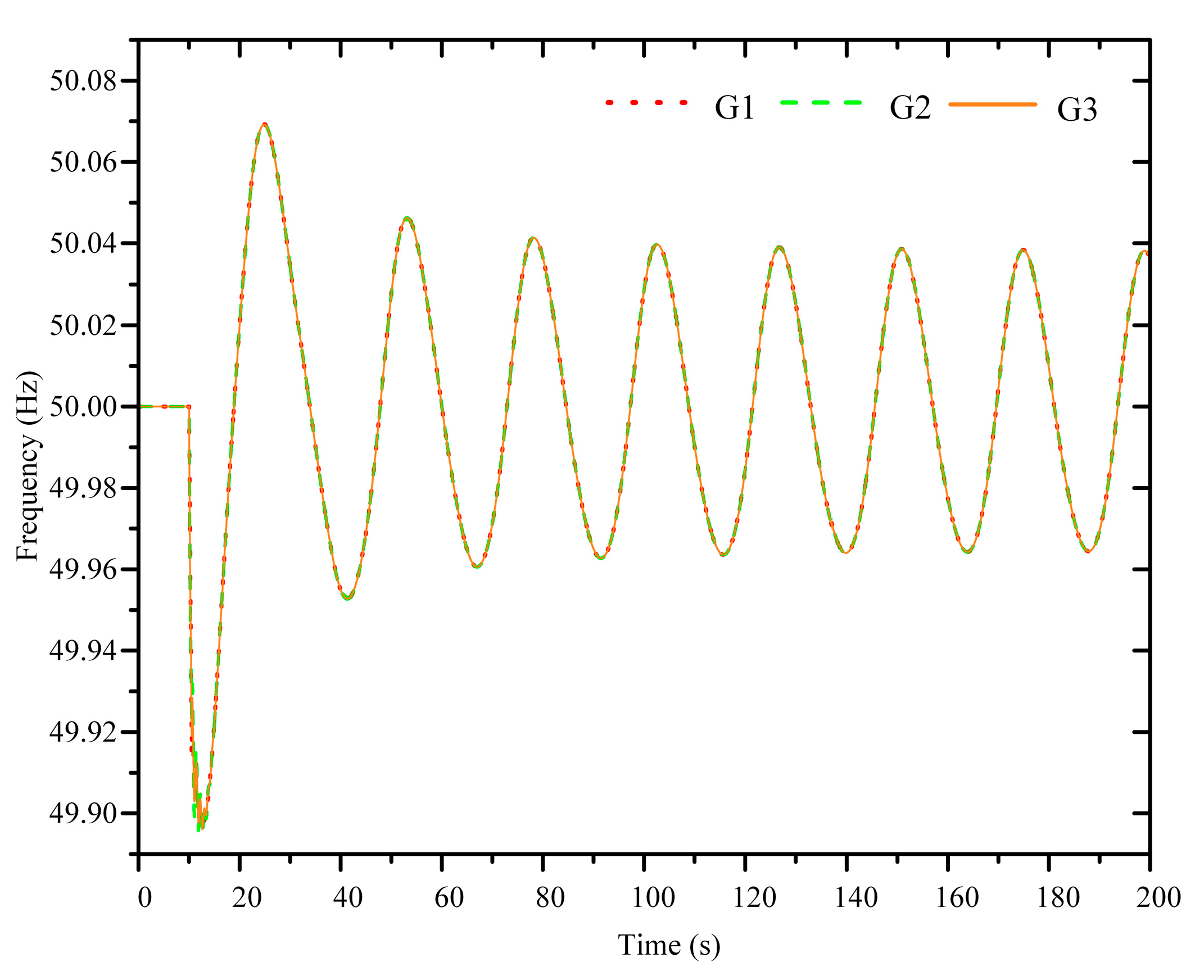
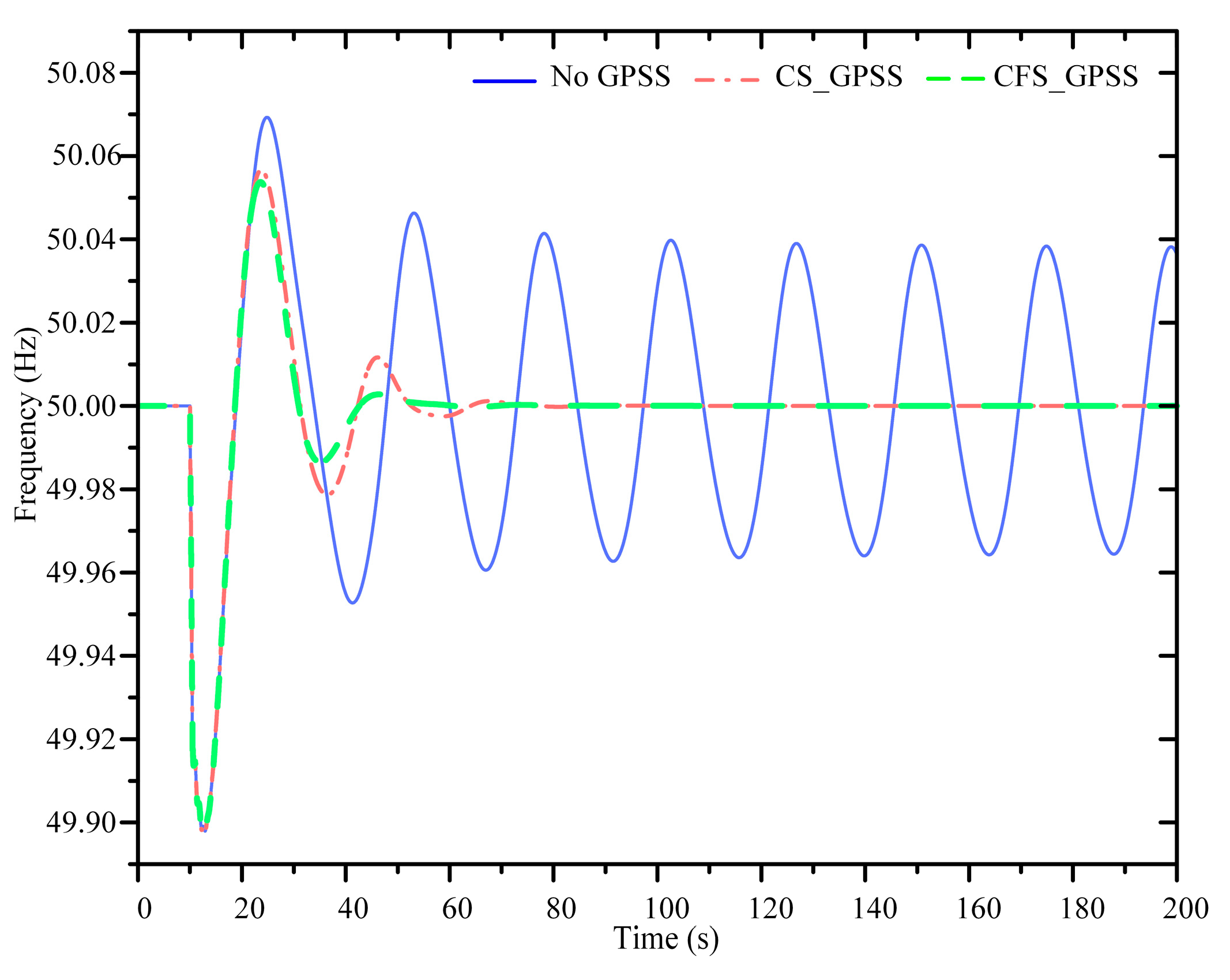
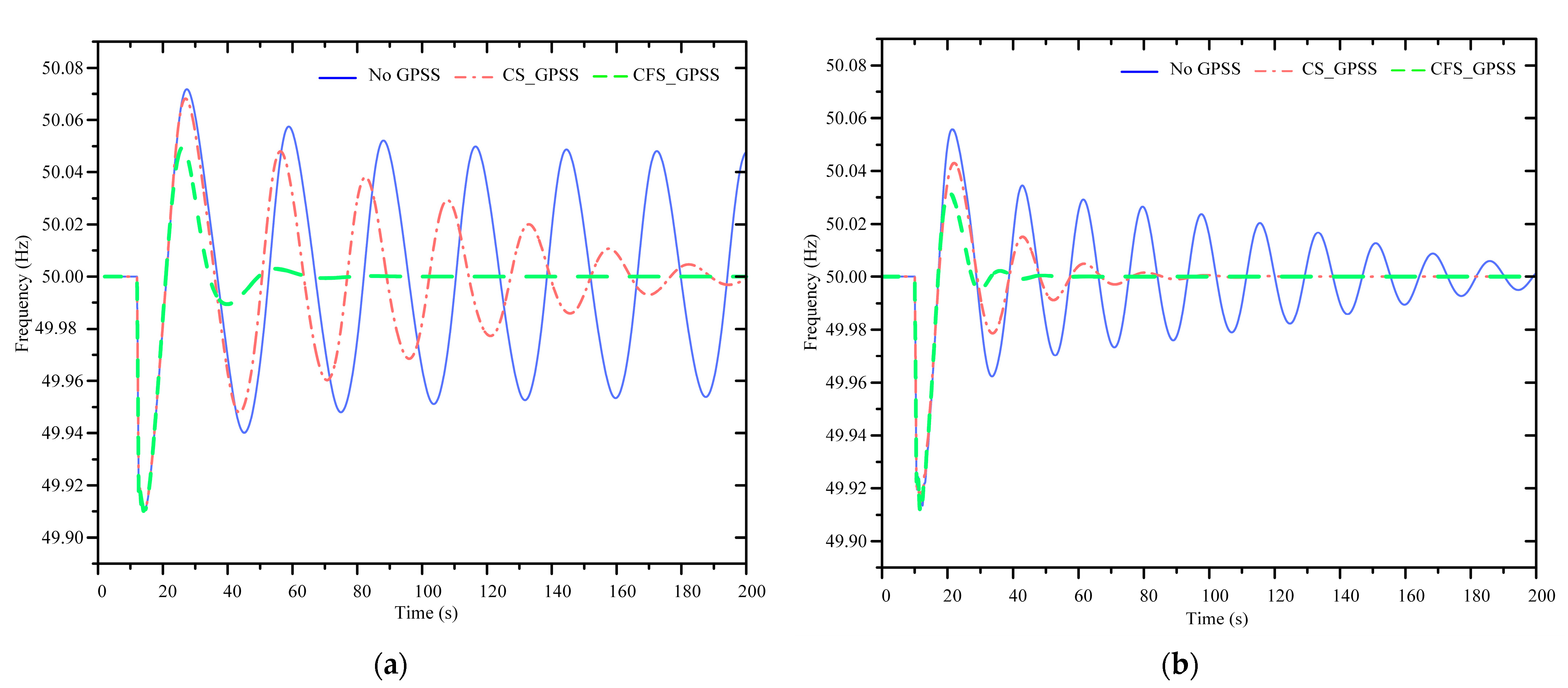
4.2. Oscillation Suppression Performance Analysis
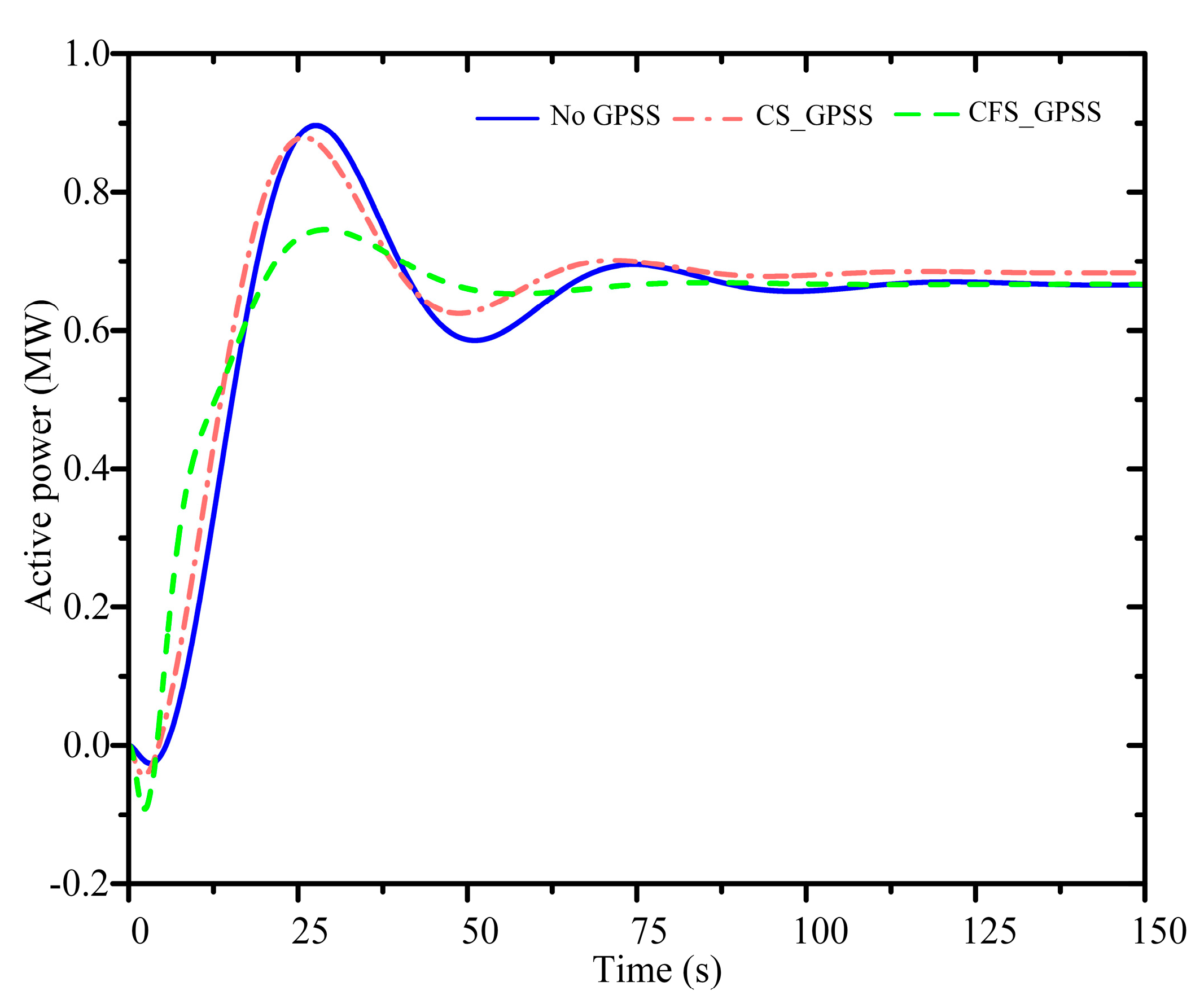
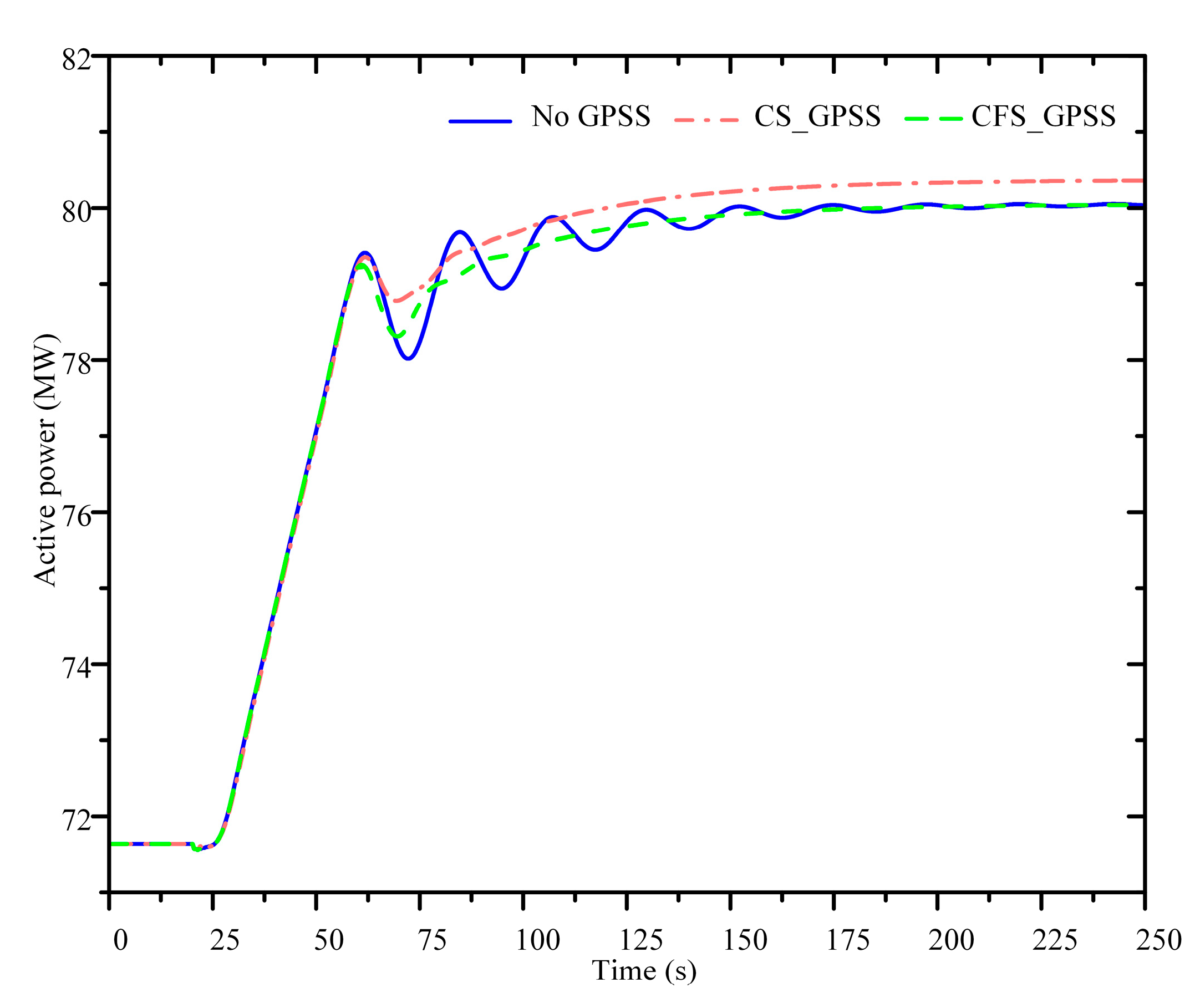
4.3. PFR Performance Analysis
5. Performance Comparison between PID and the CFS_GPSS
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Nomenclature
| ULFO | ultra-low-frequency oscillations |
| PFR | primary frequency regulation |
| PSS | power system stabilizer |
| GPSS | governor-side power system stabilizer |
| CS_GPSS | conventional structured governor-side power system stabilizer |
| CFS_GPSS | center-frequency-structured governor-side power system stabilizer |
| PID | proportional-integral-derivative |
Appendix A. The Specific Parameters of the 3-Machine, 9-Node System

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Parameters | ||||||
|---|---|---|---|---|---|---|---|
| 247.5 | 192 | 128 | 16.5 | 18 | 13.8 | ||
| 0.36 | 1.72 | 0.36 | 0.23 | 1.66 | 0.23 | ||
| 0.15 | 0.23 | 0.15 | -- | 0.38 | -- | ||
| 0.1 | 0.1 | 0.1 | 0.1 | 0.1 | 0.1 | ||
| 0.08 | 0.1 | 0.08 | -- | 0.54 | -- | ||
| 8.96 | 6 | 8.96 | 0.05 | 0.05 | 0.05 | ||
| 0.05 | 0.05 | 0.05 | 9.55 | 4 | 6 |
| Load | Active Power (MW) | Reactive Power (Mvar) |
|---|---|---|
| Load 1 | 125 | 50 |
| Load 2 | 90 | 30 |
| Load 3 | 100 | 35 |
References
- Wu, P.; Zhao, B.; Cheng, Y.; Sun, H.D. Benchmark for AC-DC Hybrid System with High Penetration of Renewables (2): Frequency Stability CSEE-FS. Proc. CSEE 2023, 1–12. Available online: http://kns.cnki.net/kcms/detail/11.2107.TM.20230901.2141.004.html (accessed on 20 October 2023).
- Liu, Q.; Yu, R.; Zhang, Y.D.; Liang, X.B. Practice and Prospect of Frequency Oscillation Suppression Technology in Power Grids With High Proportion of Hydropower. Power Syst. Technol. 2022, 46, 3840–3848. [Google Scholar] [CrossRef]
- Li, S.; Cao, Z.; Hu, K.; Chen, D. Performance Assessment for Primary Frequency Regulation of Variable-Speed Pumped Storage Plant in Isolated Power Systems. Energies 2023, 16, 1238. [Google Scholar] [CrossRef]
- Yue, L.; Xue, A.; Li, Z.Q.; Meng, H.M.; Yan, J.F.; Li, B.Q.; Bi, T.S.; Yang, Q.X. Effects on Extra-Low Frequency Oscillation Caused by Hydro Generator Governor System and Model Suitability Analysis. Proc. CSEE 2019, 39, 227–235+337. [Google Scholar] [CrossRef]
- Sun, L.; Zhao, X. Modelling and Analysis of Frequency-Responsive Wind Turbine Involved in Power System Ultra-Low Frequency Oscillation. IEEE Trans. Sustain. Energy 2022, 13, 844–855. [Google Scholar] [CrossRef]
- Wang, P.; Li, B.; Zhao, J.; Liu, T.; Jiang, Q.; Chen, G. The Mechanism of Ultra-Low Frequency Oscillations With the Same Mode Shapes. IEEE Access 2020, 8, 198047–198057. [Google Scholar] [CrossRef]
- Xue, Y.; Bin, Z. Analysis of Mode Interaction in Ultra-low Frequency Oscillation Based on Trajectory Eigenvalue. J. Mod. Power Syst. Clean Energy 2020, 8, 1208–1220. [Google Scholar] [CrossRef]
- Pico, H.V.; McCalley, J.D.; Angel, A.; Leon, R.; Castrillon, N.J. Analysis of Very Low Frequency Oscillations in Hydro-Dominant Power Systems Using Multi-Unit Modeling. IEEE Trans. Power Syst. 2012, 27, 1906–1915. [Google Scholar] [CrossRef]
- Liu, B.; Tang, F.; Yu, R.; Liu, F.S.; Zhang, Y.D. Frequency Stability Coordination Control Technology and Practice of a Multi-DC outgoing Power Grid with a High Proportion of Hydropower. Power Syst. Prot. Control 2021, 49, 181–187. [Google Scholar] [CrossRef]
- Wang, X.; Zhang, Y.; Wang, G.H.; Yu, R.; Zhang, J.; Sun, H.; Luo, X.; Chu, X.J.; Zhang, S.Y.; Peng, L. Research on Ultra-Low Frequency Oscillation Risk and Influencing Factors of High-Ratio Hydroelectric Transmission System. Power Syst. Technol. 2019, 43, 206–212. [Google Scholar] [CrossRef]
- Mehigan, L.; Al Kez, D.; Collins, S.; Foley, A.; Ó’gallachóir, B.; Deane, P. Renewables in The European Power System and The Impact on System Rotational Inertia. Energy 2020, 203, 117776. [Google Scholar] [CrossRef]
- Tielens, P.; Van Hertem, D. The relevance of inertia in power systems. Renew. Sustain. Energy Rev. 2016, 55, 999–1009. [Google Scholar] [CrossRef]
- Cai, W.J. Technical Study on Improvement of Generator-Grid Coordination Capability of Turbine Governor. Mech. Electr. Technol. Hydropower Stn. 2019, 42, 59–62+97. [Google Scholar] [CrossRef]
- Chen, G.; Tang, F.; Shi, H.; Yu, R.; Wang, G.; Ding, L.; Liu, B.; Lu, X. Optimization Strategy of Hydrogovernors for Eliminating Ultralow-Frequency Oscillations in Hydrodominant Power Systems. IEEE J. Emerg. Sel. Top. Power Electron. 2018, 6, 1086–1094. [Google Scholar] [CrossRef]
- Xiao, C.; Wang, D.L.; Li, Z.P.; Li, Z.; Zhou, X.; Kang, J.T. Research on Parameter Optimization Control of Turbine Governor for Suppressing Ultra-low Frequency Oscillation in Power Systems. Power Syst. Technol. 2020, 44, 2135–2142. [Google Scholar] [CrossRef]
- Su, Y.P.; Liu, T.Q.; Li, B.H.; Jiang, Q.; Han, X.Y.; Chen, G. Mechanism Analysis of Ultra-low Frequency Oscillation and Parameter Optimization of Hydro Turbine Governor. Power Syst. Technol. 2020, 44, 1008–1016. [Google Scholar] [CrossRef]
- Deng, W.; Wang, D.L.; Wei, M.X.; Zhou, X.; Wu, S.J.; He, P.; Kang, J.T. Influencing Mechanism Study on Turbine Governor Parameters Upon Ultra-low Frequency Oscillation of Power System. Power Syst. Technol. 2019, 43, 1371–1377. [Google Scholar] [CrossRef]
- Zhang, G.; Zhao, J.; Hu, W.; Cao, D.; Duan, N.; Chen, Z.; Blaabjerg, F. Deep Reinforcement Learning Enabled Bi-Level Robust Parameter Optimization of Hydropower-Dominated Systems for Damping Ultra-Low Frequency Oscillation. J. Mod. Power Syst. Clean Energy 2023, 11, 1770–1783. [Google Scholar] [CrossRef]
- Shi, H.B.; Chen, G.; Ding, L.J.; Han, X.Y.; Zhang, Y.D.; Chen, Z.; Zhang, H.; Liu, C. PID Parameter Optimization of Hydro Turbine Governor Considering the Primary Frequency Regulation Performance and Ultra-Low Frequency Oscillation Suppression. Power Syst. Technol. 2019, 43, 221–226. [Google Scholar] [CrossRef]
- Dong, W.; Cao, Z.; Zhao, P.; Yang, Z.; Yuan, Y.; Zhao, Z.; Chen, D.; Wu, Y.; Xu, B.; Venkateshkumar, M. A Segmented Optimal PID Method to Consider both Regulation Performance and Damping Characteristic of Hydroelectric Power System. Renew. Energy 2023, 27, 1–12. [Google Scholar] [CrossRef]
- Shi, X.; Ruan, G.; Lu, H.; Chen, H.; Cai, W.; Ron, H.; Chen, G.; Zhao, Y. Analysis of Ultra-Low Frequency Oscillation in Hydro-Dominant Power System and Suppression Strategy by GPSS. IEEE Trans. Ind. Appl. 2023, 59, 2796–2806. [Google Scholar] [CrossRef]
- Liu, S.B.; Wang, D.L.; Ma, N.N.; Deng, W.; Zhou, X.; Wu, S.J.; He, P. Study on Characteristics and Suppressing Countermeasures of Ultra-low Frequency Oscillation Caused by Hydropower Units. Proc. CSEE 2019, 39, 5354–5362+5582. [Google Scholar] [CrossRef]
- Zhang, J.X.; Chen, C.; Zhou, J.; Xu, G.F.; Mei, Y.; Liu, W.; Dai, Z.F.; Cai, D.Y.; Zhou, Y.H.; Hong, C. Suppression of Very Low Frequency Oscillation in Asynchronous Yunnan Grid Based on Hydroelectric Governor Additional Damping Control. South. Power Syst. Technol. 2018, 12, 38–43+51. [Google Scholar] [CrossRef]
- Wang, G.H.; Tang, Y.; Li, Y.; Ai, D.P.; Chen, G.; Wei, W. Control Method for Additional Damper in Hydro-turbine Speed Governor of Hydro-dominant Power Systems. CSEE J. Power Energy Syst. 2023, 9, 589–598. [Google Scholar] [CrossRef]
- Zhang, J.X.; Shi, X.L.; Chen, G.; Zhou, J.; Cai, D.Y.; Cai, W.J.; Jiang, C.Y.; Zhao, Y. Simulation Test on Additional Damping Control of Hydropower Unit Governor. South. Power Syst. Technol. 2019, 13, 24–28. [Google Scholar] [CrossRef]
- Satapathy, S.; Nahak, N.; Sharma, R.; Samal, J. A Coordinated Hydro Turbine Governor with Fractional STATCOM for Critical Power Oscillation Damping. In Proceedings of the IEEE Drives and Energy Systems, Jaipur, India, 14–17 December 2022; pp. 1–5. [Google Scholar] [CrossRef]
- Chen, J.; Zheng, Y.; Liu, D.; Du, Y.; Xiao, Z. Quantitative Stability Analysis of Complex Nonlinear Hydraulic Turbine Regulation System Based on Accurate Calculation. Appl. Energy 2023, 351, 121853. [Google Scholar] [CrossRef]
- Wang, P.; Jiang, Q.; Li, B.; Liu, T.; Li, X.; Chen, G.; Zeng, X.; Blaabjerg, F. Ultra-low Frequency Oscillation Analysis Considering Thermal-Hydro Power Proportion. Int. J. Electr. Power Energy Syst. 2023, 148, 108919. [Google Scholar] [CrossRef]

















| Parameters | bp | KD | TD | KP1 | KI1 | KD1 | T | To |
|---|---|---|---|---|---|---|---|---|
| Value | 0.04 | 0 | 0 | 6 | 0 | 0 | 0.12 | 55 |
| Operating Condition 1 | Operating Condition 2 | Operating Condition 3 | |||
|---|---|---|---|---|---|
| Parameters | Value | Parameters | Value | Parameters | Value |
| 247.5 | 220 | 270 | |||
| 128 | 115 | 140 | |||
| Line 4–5 | 5.3 + j45.0 | Line 4–5 | 2.7 + j22.5 | Line 4–5 | 10.6 + j89.9 |
| Line 4–6 | 9.0 + j48.7 | Line 4–6 | 4.5 + j24.3 | Line 4–6 | 18.0 + j97.3 |
| Line 6–9 | 20.6 + j89.9 | Line 6–9 | 10.3 + j45.0 | Line 6–9 | 41.3 + j179.9 |
| Line 8–9 | 6.3 + j53.3 | Line 8–9 | 3.2 + j26.7 | Line 8–9 | 12.6 + j106.7 |
| Parameters | Value | Parameters | Value |
|---|---|---|---|
| 30 | 3.63 | ||
| 3.025 | 4.356 | ||
| 3.63 | 3.7 | ||
| 3.7 | 0.98 | ||
| 0.98 | 3.7 | ||
| 3.7 | 0.98 | ||
| 0.98 | 3.7 | ||
| 3.7 | 0.98 | ||
| 0.98 |
| Control Strategies | Number of Oscillations (Cycle) | Steady Time (s) | Amplitude of Oscillation (Hz) | |
|---|---|---|---|---|
| Upper Limit | Lower Limit | |||
| No GPSS | >15 | >100 | 50.07 | 49.95 |
| CS_GPSS | 2 | 52 | 50.05 | 49.98 |
| CFS_GPSS | 1.5 | 41 | 50.05 | 49.99 |
| Control Strategies | Number of Oscillations (Cycle) | Delay Time (s) | Rise Time (s) | Settling Time (s) |
|---|---|---|---|---|
| No GPSS | 4.5 | 10.83 | 40 | 102 |
| CS_GPSS | 1 | 11 | 64 | 125 |
| CFS_GPSS | 1 | 10.83 | 40 | 92 |
| Control Strategies | Number of Oscillations (Cycle) | Delay Time (s) | Rise Time (s) | Settling Time (s) |
|---|---|---|---|---|
| No GPSS | 4.5 | 10.83 | 40 | 102 |
| PID | 1 | 10.83 | 99 | 126 |
| CFS_GPSS | 1 | 10.83 | 40 | 92 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jia, Y.; Tan, B.; Zhang, W.; Jiang, D.; Yang, C.; Wen, Y. A Novel Control Strategy for Hydraulic Turbines to Consider Both Primary Frequency Regulation and Ultra-Low Frequency Oscillation Suppression. Energies 2024, 17, 1067. https://doi.org/10.3390/en17051067
Jia Y, Tan B, Zhang W, Jiang D, Yang C, Wen Y. A Novel Control Strategy for Hydraulic Turbines to Consider Both Primary Frequency Regulation and Ultra-Low Frequency Oscillation Suppression. Energies. 2024; 17(5):1067. https://doi.org/10.3390/en17051067
Chicago/Turabian StyleJia, Yong, Bangwei Tan, Wentao Zhang, Dongrong Jiang, Chao Yang, and Yunhao Wen. 2024. "A Novel Control Strategy for Hydraulic Turbines to Consider Both Primary Frequency Regulation and Ultra-Low Frequency Oscillation Suppression" Energies 17, no. 5: 1067. https://doi.org/10.3390/en17051067