
Coordinated Dispatch Optimization between the Main Grid and Virtual Power Plants Based on Multi-Parametric Quadratic Programming

Abstract
:1. Introduction
2. Materials and Methods
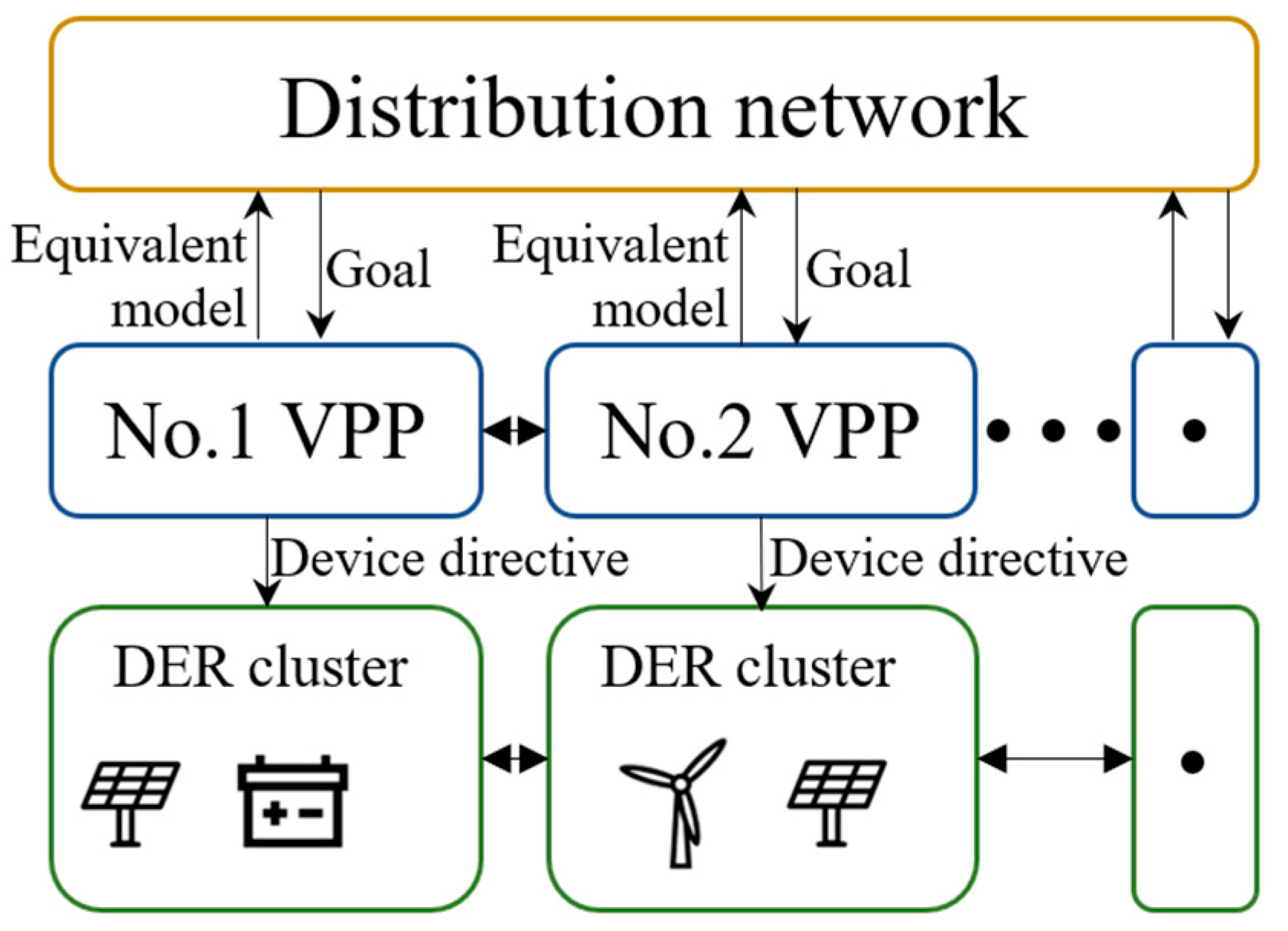
2.1. Coordinated Dispatch Model between Main Grid and VPPs
2.1.1. Main Grid Model
2.1.2. VPP Model
2.1.3. Boundary Conditions
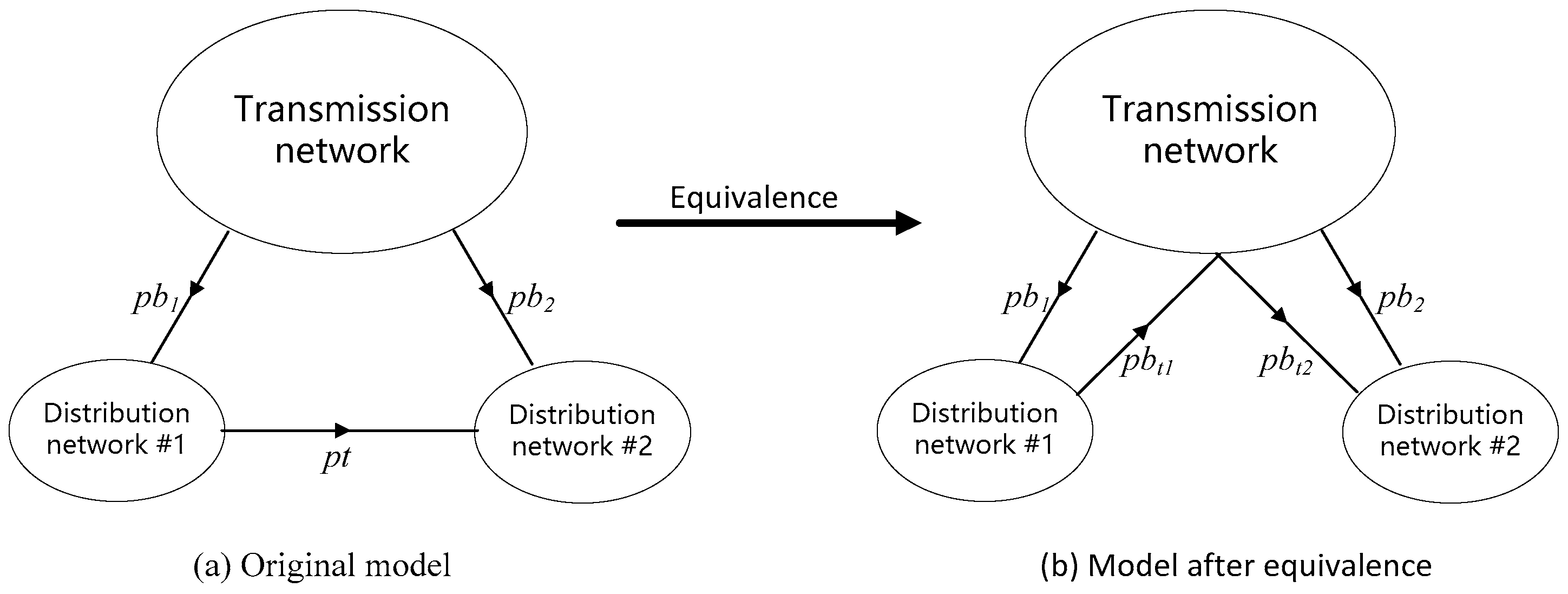
2.1.4. Equivalence of Tie Lines in VPPs
2.2. Robust Optimal Power Flow Considering Impact of DERs on System Operation
3. Problem Analysis and Solution
4. Case Study
4.1. Simulation of Coordinated Economic Dispatching
4.1.1. Comparison of Numerical Results
4.1.2. Computing Performance Test
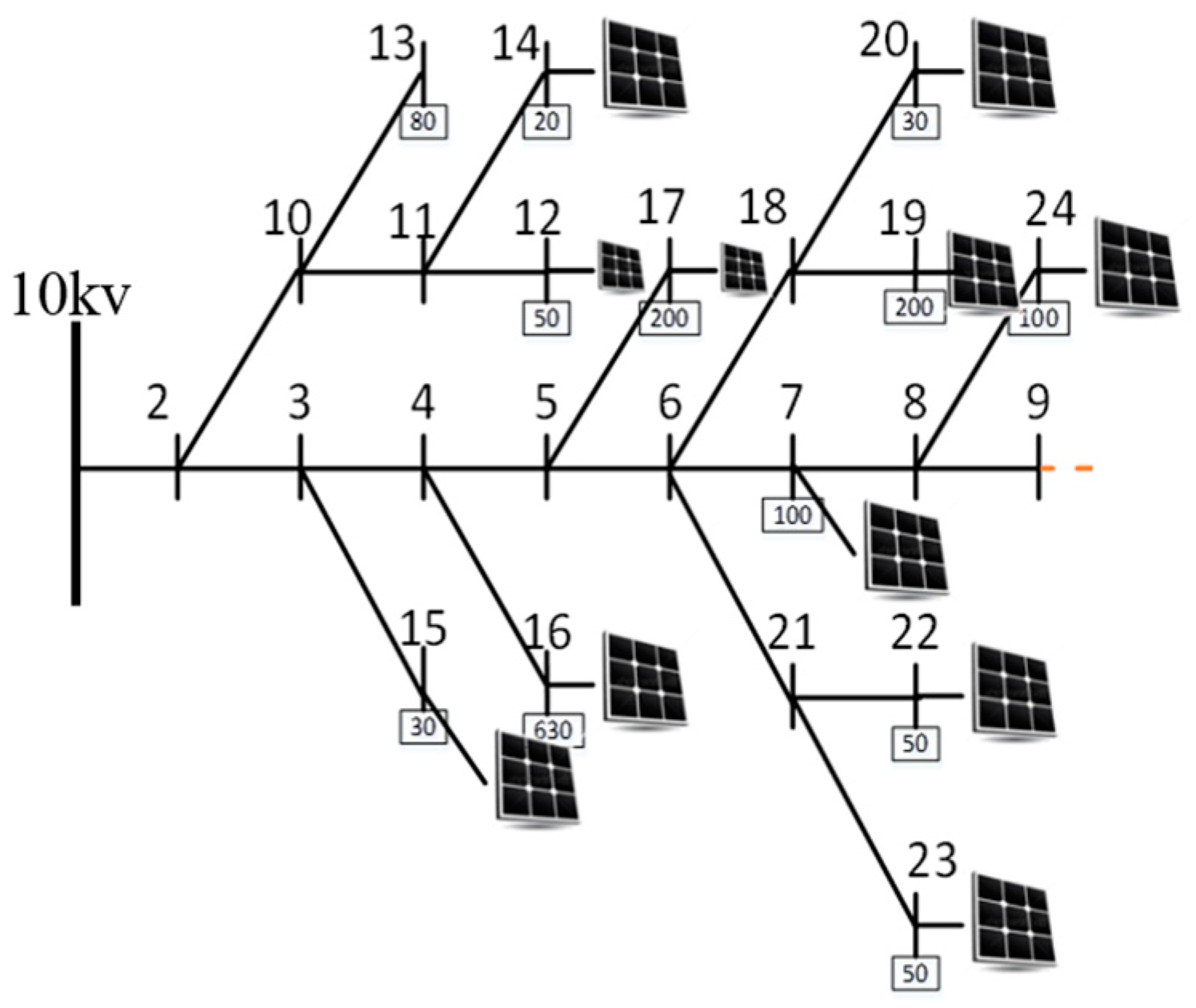
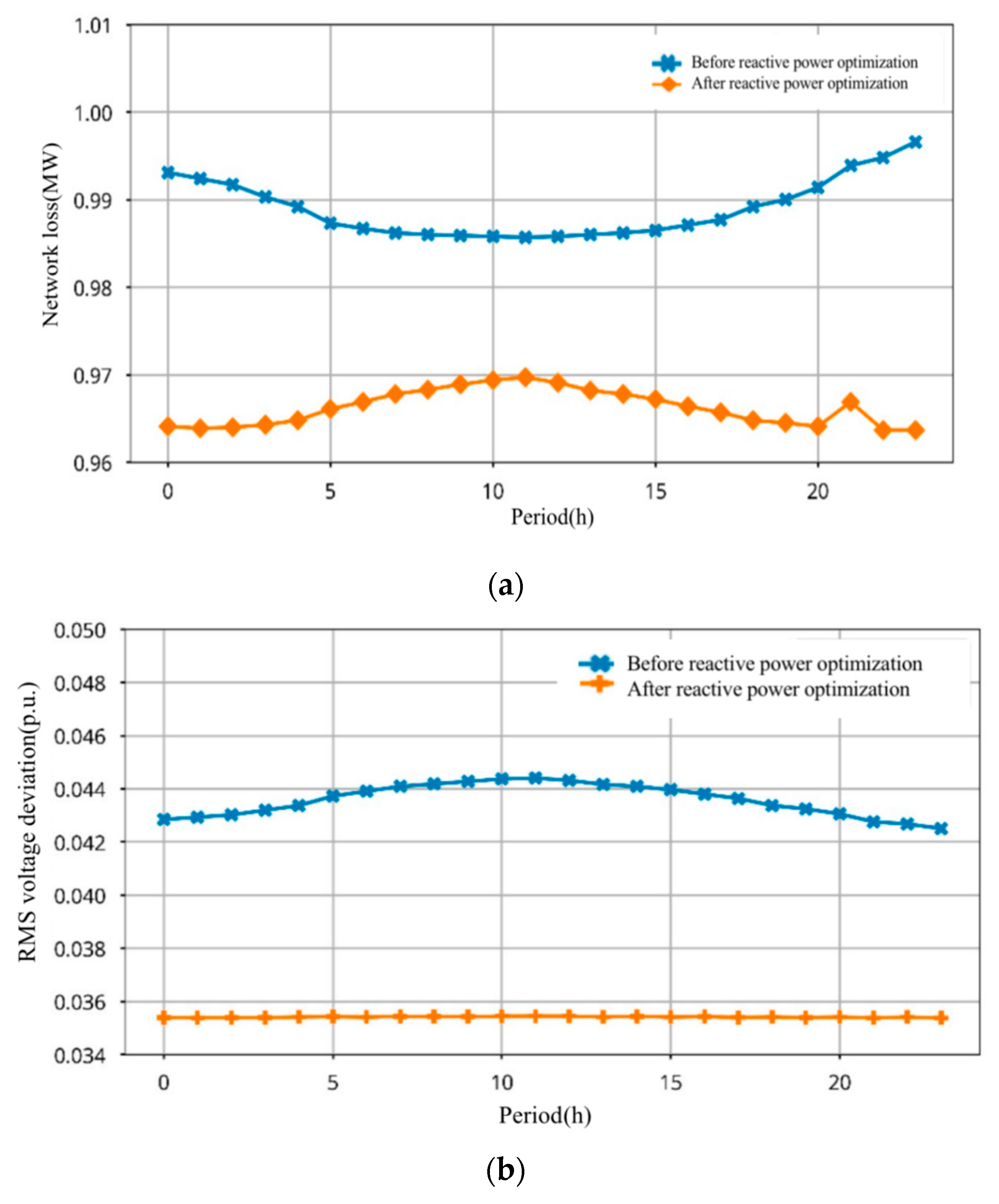
4.2. Simulation of Reactive Power and Voltage Control Model
5. Analysis of the Impact of the DER
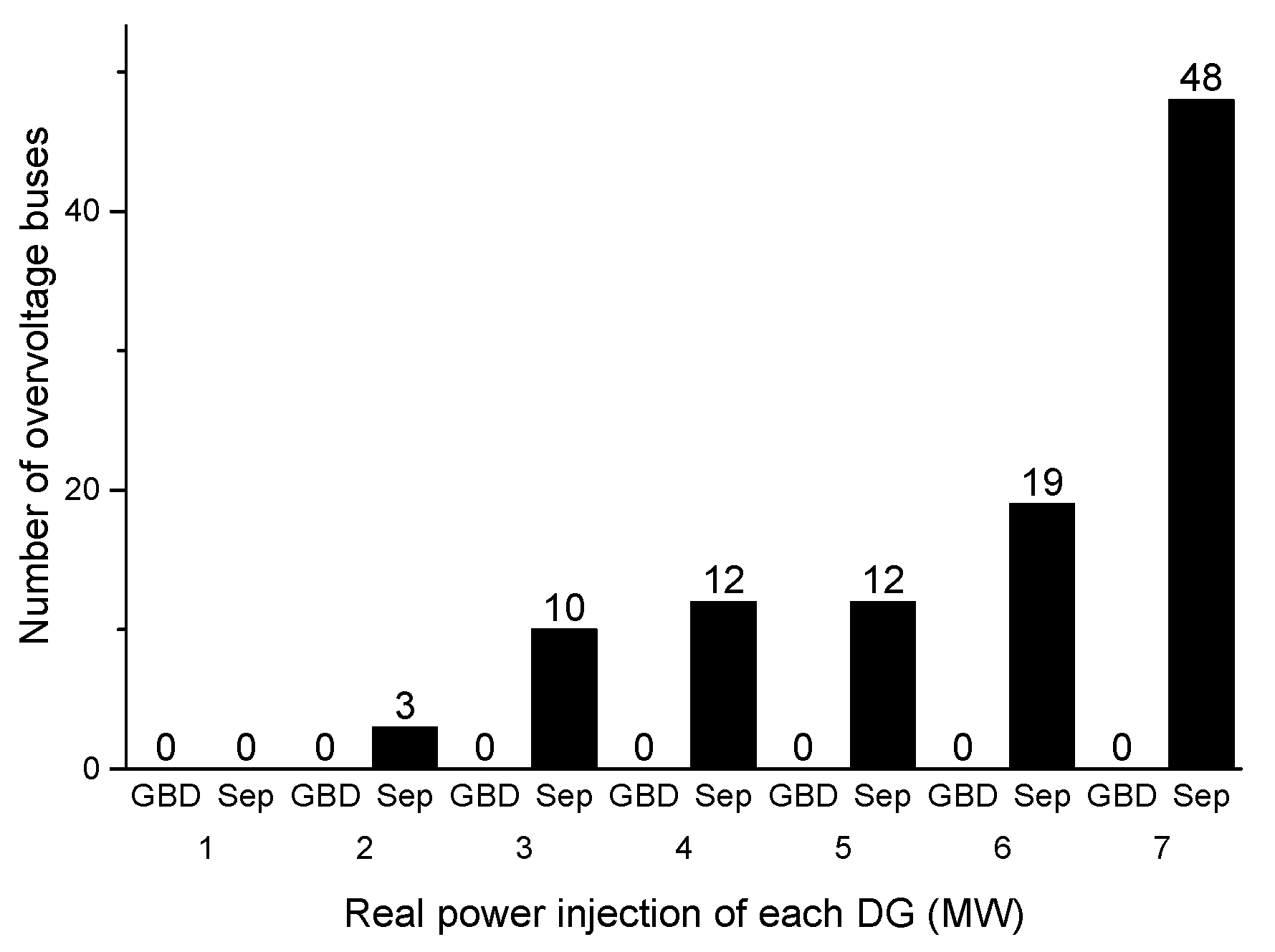
5.1. Impact of DER Clusters on Grid Voltage Security
5.2. Influence of DERs Uncertainty on Power Grid Operation
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Akorede, M.F.; Hizam, H.; Pouresmaeil, E. Distributed energy resources and benefits to the environment. Renew. Sustain. Energy Rev. 2010, 14, 724–734. [Google Scholar] [CrossRef]
- Huang, J.; Jiang, C.; Xu, R. A review on distributed energy resources and MicroGrid. Renew. Sustain. Energy Rev. 2008, 12, 2472–2483. [Google Scholar]
- Spiller, E.; Esparza, R.; Mohlin, K. The role of electricity tariff design in distributed energy resource deployment. Energy Econ. 2023, 120, 106500. [Google Scholar] [CrossRef]
- Strbac, G.; Jenkins, N.; Green, T.; Pudjianto, D. Review of innovative network concepts. In DG-GRID Project Report; Energy Research Centre of the Netherlands (ECN): Petten, The Netherlands, 2006. [Google Scholar]
- Zhang, Y.; Pan, W.; Lou, X.; Yu, J.; Wang, J. Operation characteristics of virtual power plant and function design of operation management platform under emerging power system. In Proceedings of the 2021 International Conference on Power System Technology (POWERCON), Haikou, China, 10–11 November 2021; pp. 194–196. [Google Scholar] [CrossRef]
- Ruiz, N.; Cobelo, I.; Oyarzabal, J. A direct load control model for virtual power plant management. IEEE Trans. Power Syst. 2009, 24, 959–966. [Google Scholar] [CrossRef]
- Coelho, A.; Iria, J.; Soares, F. Network-secure bidding optimization of aggregators of multi-energy systems in electricity, gas, and carbon markets. Appl. Energy 2021, 301, 117460. [Google Scholar] [CrossRef]
- Iria, J.; Scott, P.; Attarha, A.; Gordon, D.; Franklin, E. MV-LV network-secure bidding optimisation of an aggregator of prosumers in real-time energy and reserve markets. Energy 2022, 242, 122962. [Google Scholar] [CrossRef]
- Fonseca, N.S.; Soares, F.; Coelho, A.; Iria, J. DSO framework to handle high participation of DER in electricity markets. In Proceedings of the 2023 19th International Conference on the European Energy Market (EEM), Lappeenranta, Finland, 6–8 June 2023; pp. 1–6. [Google Scholar] [CrossRef]
- Gholami, K.; Azizivahed, A.; Arefi, A.; Li, L. Risk-averse Volt-VAr management scheme to coordinate distributed energy resources with demand response program. Int. J. Electr. Power Energy Syst. 2023, 146, 108761. [Google Scholar] [CrossRef]
- Zhang, Y.; Yuan, F.; Zhai, H.; Song, C.; Poursoleiman, R. Optimizing the planning of distributed generation resources and storages in the virtual power plant, considering load uncertainty. J. Clean. Prod. 2023, 387, 135868. [Google Scholar] [CrossRef]
- Danish, M.S.S.; Senjyu, T.; Nazari, M.; Zaheb, H.; Nassor, T.S.; Danish, S.M.S.; Karimy, H. Smart and sustainable building appraisal. J. Sustain. Energy Revolut. 2021, 2, 1–5. [Google Scholar] [CrossRef]
- Himeur, Y.; Elnour, M.; Fadli, F.; Meskin, N.; Petri, I.; Rezgui, Y.; Bensaali, F.; Amira, A. Next-generation energy systems for sustainable smart cities: Roles of transfer learning. Sustain. Cities Soc. 2022, 85, 104059. [Google Scholar] [CrossRef]
- Chen, J.; Deng, G.; Zhang, L.; Ahmadpour, A. Demand side energy management for smart homes using a novel learning technique–economic analysis aspects. Sustain. Energy Technol. Assess. 2022, 52, 102023. [Google Scholar] [CrossRef]
- Wang, W.; Liu, H.; Ji, Y.; Qu, X. Optimal scheduling strategy for virtual power plant considering voltage control. In Proceedings of the 2021 International Conference on Power System Technology (POWERCON), Haikou, China, 14–16 September 2021; pp. 870–874. [Google Scholar] [CrossRef]
- Vale, Z.; Pinto, T.; Morais, H.; Praça, I.; Faria, P. Virtual power plant’s multi-level negotiation in smart grids and competitive electricity markets. In Proceedings of the 2011 IEEE Power and Energy Society General Meeting, Detroit, MI, USA, 22 February 2011; pp. 1–8. [Google Scholar] [CrossRef]
- Bertram, R.; Schnettler, A. A control model of virtual power plant with reactive power supply for small signal system stability studies. In Proceedings of the 2017 IEEE Manchester PowerTech, Manchester, UK, 18–22 June 2017; pp. 1–6. [Google Scholar] [CrossRef]
- Ruthe, S.; Rehtanz, C.; Lehnhoff, S. Towards frequency control with large scale virtual power plants. In Proceedings of the 2012 3rd IEEE PES Innovative Smart Grid Technologies Europe (ISGT Europe), Berlin, Germany, 14–17 October 2012; pp. 1–6. [Google Scholar] [CrossRef]
- Bao, Y.; Cheng, X.; Pi, J.; Zhang, Y.; Hou, C.; Guo, Y. Selection strategy of virtual power plant members considering power grid security and economics of virtual power plant. In Proceedings of the 2021 IEEE 5th Conference on Energy Internet and Energy System Integration (EI2), Taiyuan, China, 22–24 October 2021; pp. 1314–1319. [Google Scholar] [CrossRef]
- Vasirani, M.; Kota, R.; Cavalcante, R.L.G.; Ossowski, S.; Jennings, N.R. An agent-based approach to virtual power plants of wind power generators and electric vehicles. IEEE Trans. Smart Grid 2013, 4, 1314–1322. [Google Scholar] [CrossRef] [Green Version]
- Zhu, J.; Duan, P.; Liu, M.; Xia, Y.; Guo, Y.; Mo, X. Bi-level real-time economic dispatch of virtual power plant considering uncertainty of renewable energy sources. IEEE Access 2019, 7, 15282–15291. [Google Scholar] [CrossRef]
- Giuntoli, M.; Poli, D. Optimized thermal and electrical scheduling of a large scale virtual power plant in the presence of energy storages. IEEE Trans. Smart Grid 2013, 4, 942–955. [Google Scholar] [CrossRef]
- Alanne, K.; Saari, A. Distributed energy generation and sustainable development. Renew. Sust. Energ. Rev. 2006, 10, 539–558. [Google Scholar] [CrossRef]
- Wang, Q.; Zhang, C.; Ding, Y.; Xydis, G.; Wang, J.; Østergaard, J. Review of real-time electricity markets for integrating distributed energy resources and demand response. Appl. Energy 2015, 138, 695–706. [Google Scholar] [CrossRef]
- Järventausta, P.; Repo, S.; Rautiainen, A.; Partanen, J. Smart grid power system control in distributed generation environment. Annu. Rev. Control 2010, 34, 277–286. [Google Scholar] [CrossRef]
- Mohd, A.; Ortjohann, E.; Schmelter, A.; Hamsic, N.; Morton, D. Challenges in integrating distributed energy storage systems into future smart grid. In Proceedings of the 2008 IEEE International Symposium on Industrial Electronics, Orlando, FL, USA, 30 June–2 July 2008; pp. 1627–1632. [Google Scholar]
- Lin, C.; Wu, W.; Chen, X.; Zheng, W. Decentralized dynamic economic dispatch for integrated transmission and active distribution networks using multi-parametric programming. IEEE Trans. Smart Grid 2018, 9, 4983–4993. [Google Scholar] [CrossRef]
- Lin, C.; Wu, W.; Zhang, B.; Wang, B.; Zheng, W.; Li, Z. Decentralized reactive power optimization method for transmission and distribution networks accommodating large-scale DG integration. IEEE Trans. Sustain. Energy 2017, 8, 363–373. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Power Generation Cost | |||
|---|---|---|---|
| Independent Scheduling | Coordinated Scheduling | ||
| System 1 | Main grid | 1,153,438 | 1,199,478 |
| VPP 1 | 125,713 | 32,203 | |
| VPP 2 | 125,713 | 32,203 | |
| VPP 3 | 125,713 | 32,203 | |
| Total cost | 1,530,577 | 1,296,087 | |
| System 2 | Main grid | 1,305,719 | 1,353,715 |
| VPP 1 | 125,713 | 32,649 | |
| VPP 2 | 125,713 | 32,790 | |
| VPP 3 | 125,713 | 32,300 | |
| Total cost | 1,682,858 | 1,451,454 | |
| R-MPQP | C-MPQP | M-GBD | ||
| System 1 | Total cost | 1,296,087 | 1,296,087 | 1,296,087 |
| Total cost error | 0% | 0% | 0% | |
| Iterations | 2 | 101 | 151 | |
| Calculating time | 0.2133 s | 7.5314 s | 15.8011 s | |
| System 2 | R-MPQP | C-MPQP | M-GBD | |
| Total cost | 1,451,454 | 1,451,454 | 1,451,454 | |
| Total cost error | 0% | 0% | 0% | |
| Iterations | 2 | 97 | 150 | |
| Calculating time | 0.9529 s | 117.4592 s | 232.2385 s |
| Scene a | Scene b | Scene c | ||
|---|---|---|---|---|
| System 1 | Robust model | 95,182 | 92,299 | 90,379 |
| Deterministic Model | 94,627 | 94,627 | 94,627 | |
| System 2 | Robust model | 274,196 | 226,836 | 195,434 |
| Deterministic model | 261,352 | 261,352 | 261,352 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, G.; Xu, M.; Wang, W.; Lei, S. Coordinated Dispatch Optimization between the Main Grid and Virtual Power Plants Based on Multi-Parametric Quadratic Programming. Energies 2023, 16, 5593. https://doi.org/10.3390/en16155593
Yang G, Xu M, Wang W, Lei S. Coordinated Dispatch Optimization between the Main Grid and Virtual Power Plants Based on Multi-Parametric Quadratic Programming. Energies. 2023; 16(15):5593. https://doi.org/10.3390/en16155593
Chicago/Turabian StyleYang, Guixing, Mingze Xu, Weiqing Wang, and Shunbo Lei. 2023. "Coordinated Dispatch Optimization between the Main Grid and Virtual Power Plants Based on Multi-Parametric Quadratic Programming" Energies 16, no. 15: 5593. https://doi.org/10.3390/en16155593