
Secondary Frequency Regulation Control Strategy with Electric Vehicles Considering User Travel Uncertainty
Abstract
:1. Introduction
- Considering EV travel uncertainty, an individual EV controllable domain model based on reliability correction is established in the frequency regulation strategy;
- A state grouping method based on EV charging urgency and SOC level was proposed to adjust the reference charging power of EVs without frequency regulation task and quantify the frequency regulation capability of EVs;
- The priority sequence parameters of EV participation in frequency regulation are proposed, and the specific response sequence of EV cluster frequency regulation is determined by combining state grouping and priority sequence parameters.
2. Framework for EV Secondary Frequency Regulation Control Strategy Considering Travel Uncertainty
3. Individual EV Controllable Domain Model and State Grouping Strategy
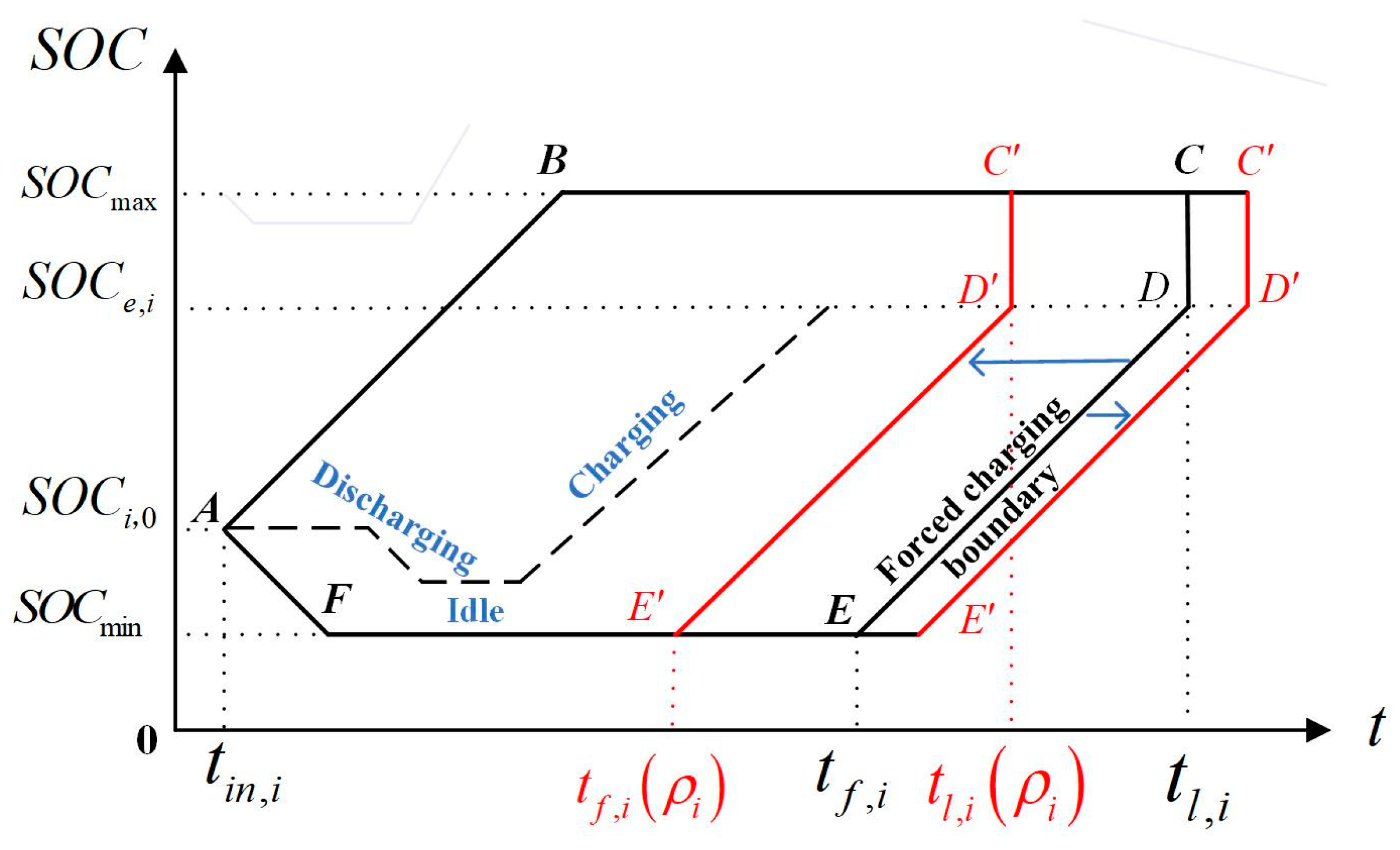
3.1. Individual EV Controllable Domain Model Based on Reliability Parameter Modification
3.2. EV State Grouping Based on Controllable Domain
3.2.1. EV State Grouping
3.2.2. Determining EV Cluster Frequency Regulation
4. FR Power Allocation Strategy Based on State Grouping and Priority List
4.1. The FR Task of EVA
4.2. Frequency Regulation Priority Parameter
4.2.1. Frequency Regulation Capability Parameter
4.2.2. Charging Urgency Parameter
4.3. FR Power Allocation of an EV
4.3.1. FR Priority List
4.3.2. Response Sequence and Response Capacity of EV
5. Results and Analysis
5.1. Simulation Model and Parameters
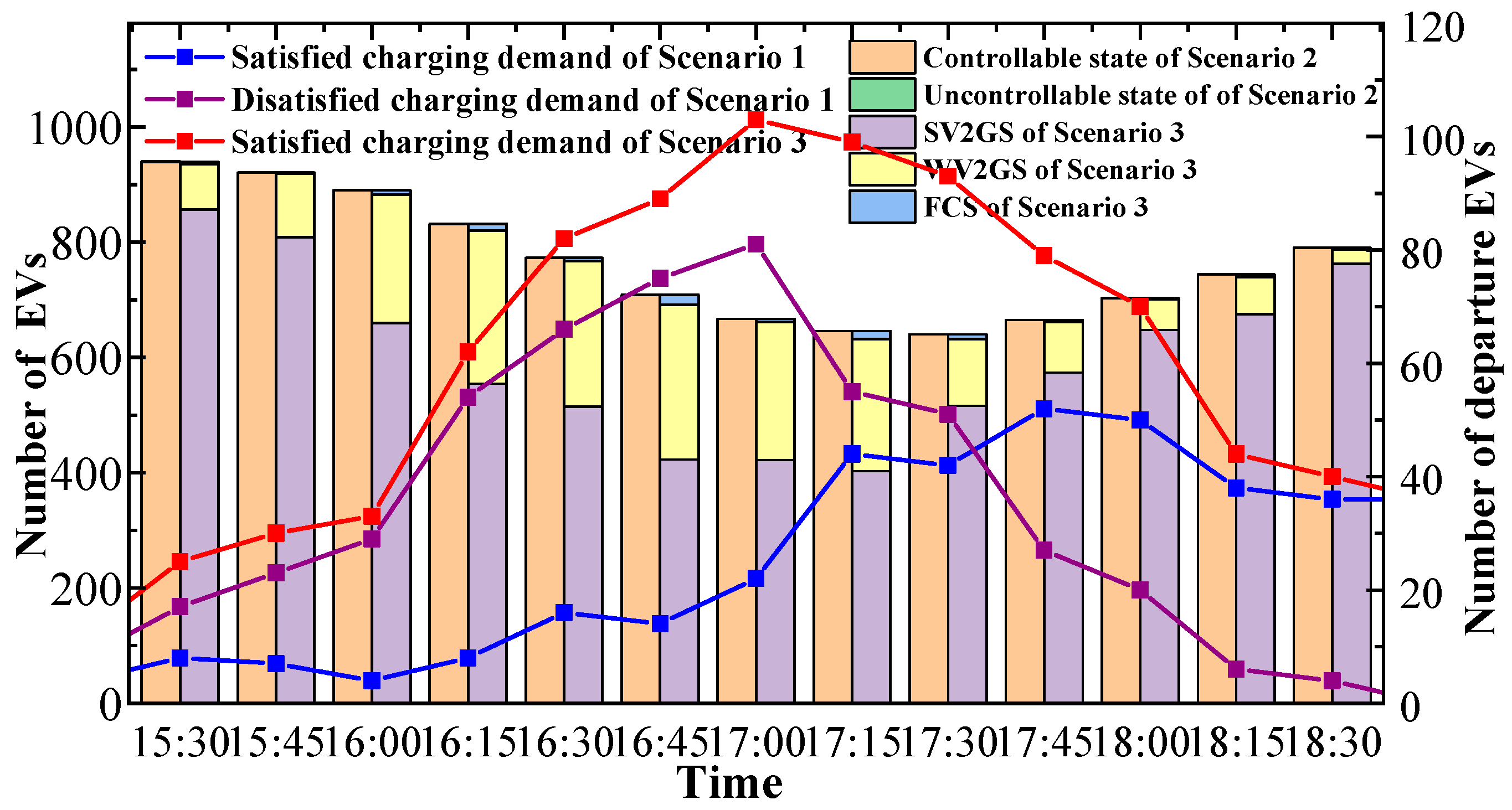
5.2. Results Analysis
5.3. Contrastive Analysis
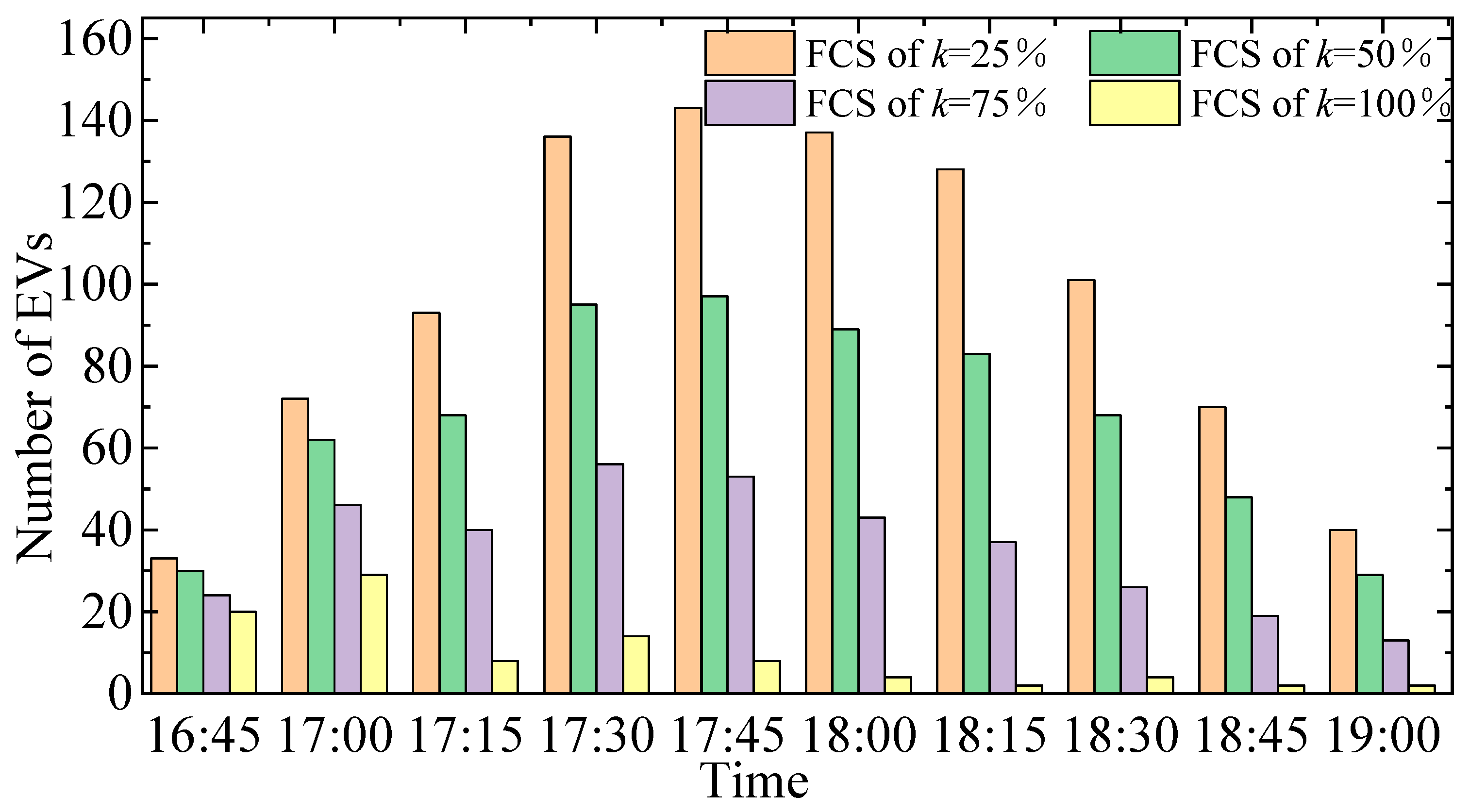
5.4. Sensitivity Analysis
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Rahimi, T.; Ding, L.; Kheshti, M.; Faraji, R.; Guerrero, J.M.; Tinajero, G.D.A. Inertia response coordination strategy of wind generators and hybrid energy storage and operation cost-based multi-objective optimizing of frequency control parameters. IEEE Access 2021, 9, 74684–74702. [Google Scholar] [CrossRef]
- Miller, N.W.; Shao, M.; Venkataraman, S.; Loutan, C.; Rothleder, M. Frequency response of California and WECC under high wind and solar conditions. In Proceedings of the 2012 IEEE Power and Energy Society General Meeting, San Diego, CA, USA, 22–26 July 2012; pp. 1–8. [Google Scholar]
- Hui, H.; Ding, Y.; Song, Y. Modeling and control offlexible loads for frequency regulation services considering compensation of communication latency and detection error. Appl. Energy 2019, 250, 161–174. [Google Scholar] [CrossRef]
- Mishra, D.K.; Złotecka, D.; Li, L. Significance of SMES Devices for Power System Frequency Regulation Scheme considering Distributed Energy Resources in a Deregulated Environment. Energies 2022, 15, 1766. [Google Scholar] [CrossRef]
- Liu, S.; Xie, X.; Yang, L. Analysis, modeling and implementation of a switching bi-directional buck-boost converter based on electric vehicle hybrid energy storage for V2G system. IEEE Access 2020, 8, 65868–65879. [Google Scholar] [CrossRef]
- Zhong, J.; He, L.; Li, C.; Cao, Y.; Wang, J.; Fang, B.; Zeng, L.; Xiao, G. Coordinated control for large-scale EV charging facilities and energy storage devices participating in frequency regulation. Appl. Energy 2014, 123, 253–262. [Google Scholar] [CrossRef]
- Fan, Y.; Zhang, L.; Xue, Z. Reactive Power Compensation Technology Based on V2G. Power Grid Technol. 2013, 37, 307–311. [Google Scholar]
- Wu, X.; Xie, X.; Lin, X. A model of regional power market where electric vehicles provide backup service. Autom. Electr. Power Syst. 2016, 40, 71–76. [Google Scholar]
- Cai, G.; Jiang, Y.; Huang, N. Charging and discharging optimization Scheduling of large-scale electric vehicles under Power Demand Response Mechanism based on multi-agent double-layer game. In Proceedings of the CSEE 2022, Lisbon, Portugal, 10–12 April 2022; pp. 1–16. [Google Scholar]
- Neofytou, N.; Blazakis, K.; Katsigiannis, Y.; Stavrakakis, G. Modeling vehicles to grid as a source of distributed frequency regulation in isolated grids with significant RES penetration. Energies 2019, 12, 720. [Google Scholar] [CrossRef]
- Ma, X.; Zhao, J.; Zhao, M. Adaptive Control Strategy of Electric Vehicles Participating in Primary Frequency Regulation of Power Grid. In Proceedings of the 2021 IEEE 4th International Electrical and Energy Conference (CIEEC), Wuhan, China, 28–30 May 2021; pp. 1–6. [Google Scholar]
- Liu, H.; Hu, Z.; Song, Y. Decentralized vehicle-to-grid control for primary frequency regulation considering charging demands. IEEE Trans Power Syst. 2013, 28, 3480–3489. [Google Scholar] [CrossRef]
- Peng, C.; Zou, J.; Lian, L. Dispatching strategies of electric vehicles participating in frequency regulation on power grid: A review. Renew. Sustain. Energy Rev. 2017, 68, 147–152. [Google Scholar] [CrossRef]
- Li, J.; Ai, X.; Hu, J. Modeling and Control Strategy of Electric Vehicle Participation in Power Grid secondary Frequency regulation. Power Grid Technol. 2019, 43, 495–503. [Google Scholar]
- Deng, Q.; Zhang, Y.; Li, T. Hierarchical Distributed Frequency Regulation Strategy of Electric Vehicle Cluster Considering Demand Charging Load Optimization. IEEE Trans. Ind. Appl. 2022, 58, 720–731. [Google Scholar] [CrossRef]
- Xia, S.; Bu, S.; Luo, X. An autonomous real-time charging strategy for plug-in electric vehicles to regulate frequency of distribution system with fluctuating wind generation. IEEE Trans. Sustain. Energy 2018, 9, 511–524. [Google Scholar] [CrossRef]
- Yao, W.; Zhao, J.; Wen, F. Frequency regulation Strategy for Electric Vehicles in Centralized Charging Mode. Autom. Electr. Power Syst. 2014, 38, 69–76. [Google Scholar]
- Han, S.; Han, S.; Sezaki, K. Development of an optimal vehicle-to-grid aggregator for frequency regulation. IEEE Trans. Smart Grid 2010, 1, 65–72. [Google Scholar]
- Wang, X.; Zhou, B.; Zhang, B. Research on electric vehicles providing frequency regulation strategy based on hierarchical control. Electr. Meas. Instrum. 2018, 55, 8–15. [Google Scholar]
- Razmi, P.; Rahimi, T.; Sabahi, K.; Gheisarnejad, M.; Khooban, M.H. Adaptive fuzzy gain scheduling PID controller for frequency regulation in modern power system. IET Renew. Power Gener. 2022, 1–16. [Google Scholar] [CrossRef]
- Tripathy, S.; Debnath, M.K.; Kar, S.K. Optimal Design of PI/PD Dual mode Controller based on Quasi Opposition Based Learning for Power System Frequency Control. e-Prime-Advances in Electrical Engineering. Electron. Energy 2023, 4, 100135. [Google Scholar]
- Du, M.; Niu, Y.; Hu, B.; Zhou, G.; Luo, H.; Qi, X. Frequency regulation analysis of modern power systems using start-stop peak shaving and deep peak shaving under different wind power penetrations. Int. J. Electr. Power Energy Syst. 2021, 125, 106501. [Google Scholar] [CrossRef]
- Michigami, T.; Ishii, T. Construction of fluctuation load model and dynamic simulation with LFC control of DC power system and frequency converter interconnection. In Proceedings of the IEEE/PES Transmission and Distribution Conference and Exhibition, Yokohama, Japan, 6–10 October 2002; pp. 382–387. [Google Scholar]
- Li, C.; Zhou, Y.; Xu, Z. System Frequency control strategy based on Energy Efficiency power plant for electric Vehicles. J. Electr. Power Syst. Autom. 2019, 31, 68–74. [Google Scholar]
- Yu, Z.; Gong, P.; Wang, Z. Real-Time Control Strategy for Aggregated Electric Vehicles to Smooth the Fluctuation of Wind-Power Output. Energies 2020, 13, 757. [Google Scholar] [CrossRef]
- Zhang, H.; Hu, Z.; Xu, Z. Evaluation of achievable vehicle-to-grid capacity using aggregate PEV model. IEEE Trans. Power Syst. 2017, 32, 784–794. [Google Scholar] [CrossRef]
- Wang, M.; Mu, Y.; Shi, Q.; Jia, H. Electric Vehicle Aggregator Modeling and Control for Frequency Regulation Considering Progressive State Recovery. IEEE Trans. Smart Grid 2020, 11, 4176–4189. [Google Scholar] [CrossRef]
- Luo, Z.; Hu, Z.; Song, Y. Optimal coordination of plug-inelectric vehicles in power grids with cost-benefit analysis—Part II: A casestudy in China. IEEE Trans. Power Syst. 2013, 28, 3556–3565. [Google Scholar] [CrossRef]
- Wang, M. State Space Model of Aggregated Electric Vehicles for Frequency Regulation. IEEE Trans. Smart Grid 2020, 11, 981–994. [Google Scholar] [CrossRef]
- Zhang, Q.; Li, Y.; Li, C. Grid frequency regulation strategy considering individual driving demand of electric vehicle. Electr. Power Syst. Res. 2018, 163, 38–48. [Google Scholar] [CrossRef]
- Xu, M.; Ai, X.; Fang, J. A two-stage stochastic Optimization Scheduling Model for electric vehicle and Unit Joint frequency regulation considering user Enthusiasm. Power Grid Technol. 2022, 46, 2033–2041. [Google Scholar]
- Zhao, Y.; Du, Y.; Li, H. Frequency Regulation Power Allocation Method for Electric Vehicles Coordinated with Thermal Power Units in AGC. In Proceedings of the 2022 5th International Conference on Energy, Electrical and Power Engineering (CEEPE), Chongqing, China, 22–24 April 2022; pp. 919–926. [Google Scholar]
- 2021 Beijing Transportation Development Annual Report. Available online: http://www.bjtrc.org.cn/List/index/cid/7.html (accessed on 1 June 2021).















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Reference | Individual EV Model | Whether to Consider Uncertainty | EV Classification Parameter | EV Response Sequence Parameter |
|---|---|---|---|---|
| [14] | naive model | No | SOC | SOB |
| [15] | naive model | Yes | SOC | Regulation unit time contribution |
| [24] | naive model | No | SOC | SOC |
| [25] | complicated model | No | SOC | Controllable coefficient |
| [27] | complicated model | Yes | Relaxation parameter | State-space model |
| this article | complicated model | Yes | SOC and charging urgency | FR capability parameters and charging urgency parameters |
| Parameter | Value | Parameter | Value |
|---|---|---|---|
| Req(p.u.) | −0.09 | NEV | 1000 |
| TG(s) | 0.2 | Driving speed (km/h) | 28.5 |
| T1(s) | 2 | Energy consumption per 100 km (kW·h) | 15 |
| T2(s) | 12 | Q (kW·h) | 40 |
| TT(s) | 0.3 | 0.95 | |
| TEV(s) | 0.035 | Pbw/Pbs(kW) | 4/2 |
| Heq(s) | 4.44 | Pcmax, Pdmax(kW) | 7 |
| D(p.u.) | 1.0 | SOCmin/SOCmax | 0.3/0.9 |
| ρi | N(0.9, 0.1) | SOC0 (p.u.) | N(0.4, 0.05) |
| tin | N(8.5, 0.52) | SOCe (p.u.) | N(0.8, 0.05) |
| tl | N(17.5, 0.52) | Commuting distance lnDS (km) | N(17.9, 4.9) |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Dong, X.; Ma, Y.; Yu, X.; Wei, X.; Ren, Y.; Zhang, X. Secondary Frequency Regulation Control Strategy with Electric Vehicles Considering User Travel Uncertainty. Energies 2023, 16, 3794. https://doi.org/10.3390/en16093794
Dong X, Ma Y, Yu X, Wei X, Ren Y, Zhang X. Secondary Frequency Regulation Control Strategy with Electric Vehicles Considering User Travel Uncertainty. Energies. 2023; 16(9):3794. https://doi.org/10.3390/en16093794
Chicago/Turabian StyleDong, Xiaohong, Yang Ma, Xiaodan Yu, Xiangyu Wei, Yanqi Ren, and Xin Zhang. 2023. "Secondary Frequency Regulation Control Strategy with Electric Vehicles Considering User Travel Uncertainty" Energies 16, no. 9: 3794. https://doi.org/10.3390/en16093794