
Fast and Robust Prediction of Multiphase Flow in Complex Fractured Reservoir Using a Fourier Neural Operator
Abstract
:1. Introduction
2. Methodology
2.1. Governing Equations
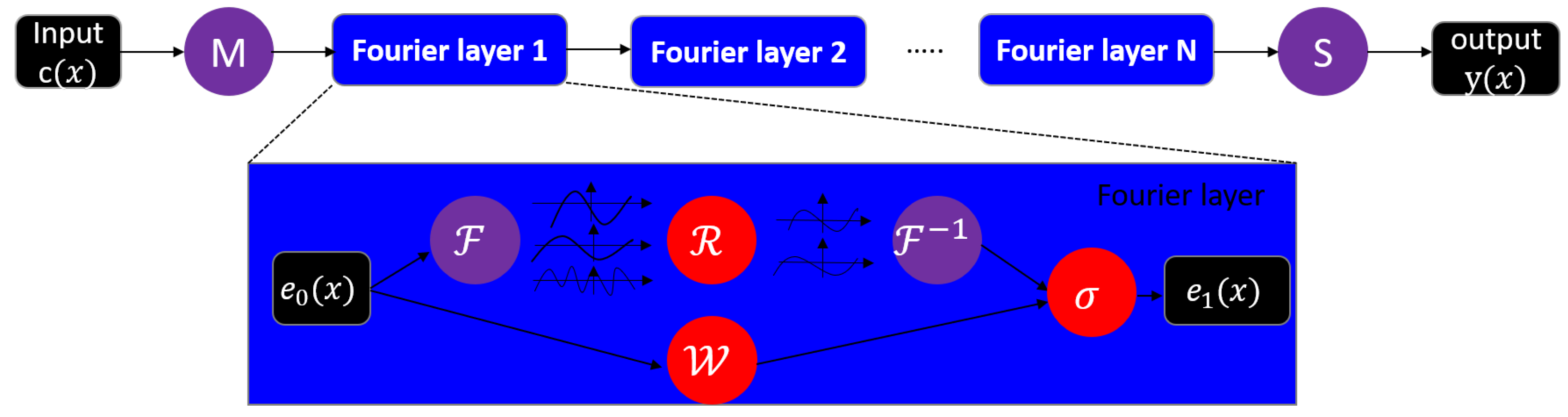
2.2. FNO Architecture
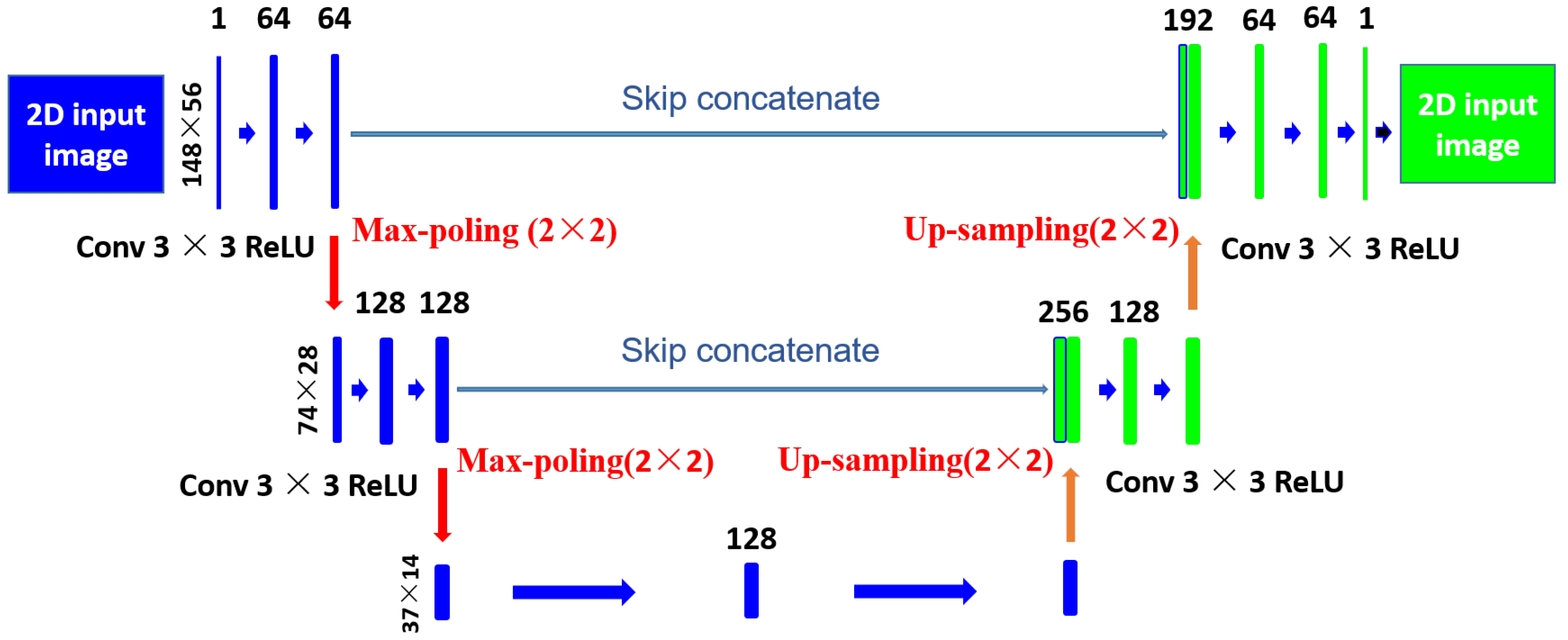
2.3. CNN Class Network Architecture
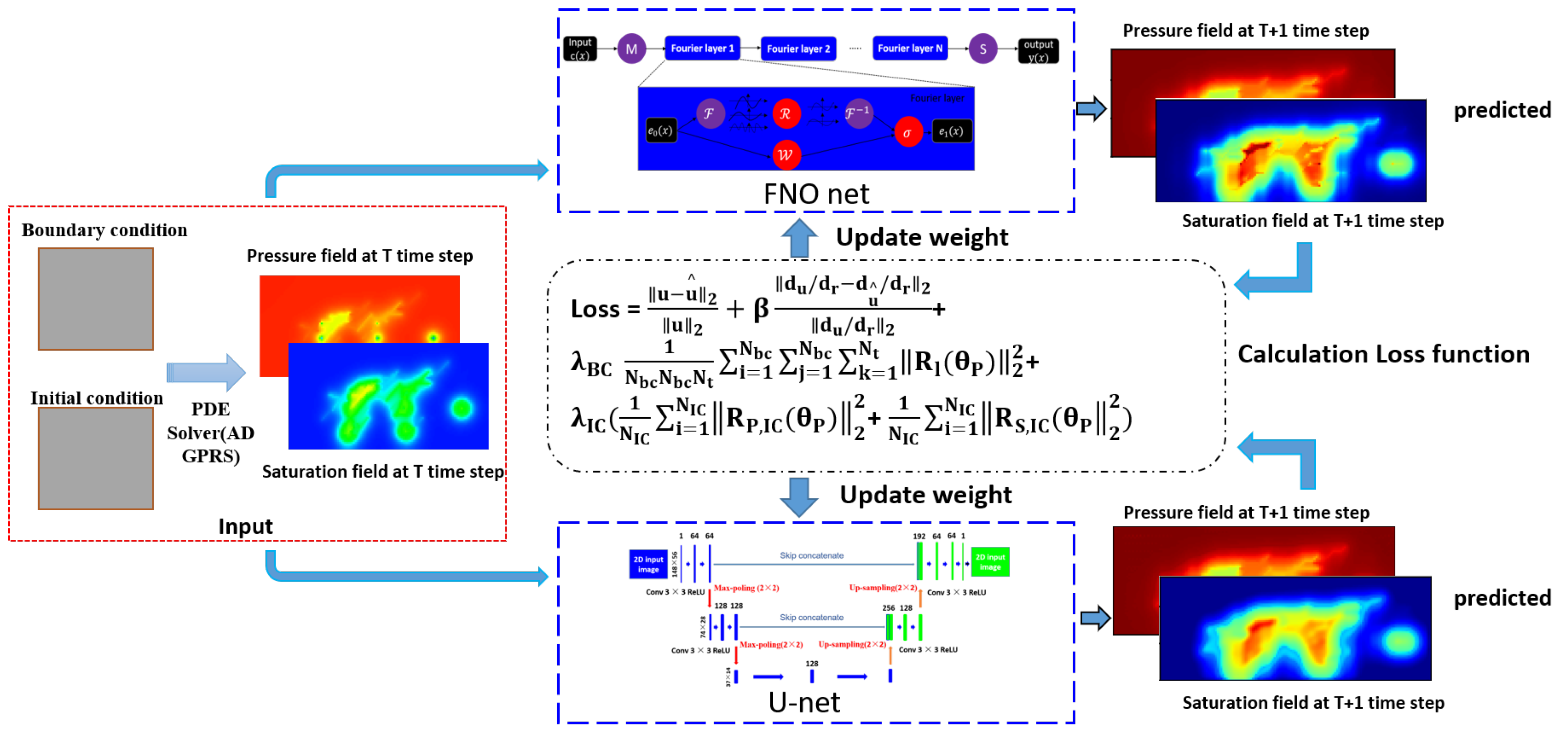
2.4. Training Details and Loss Function Design
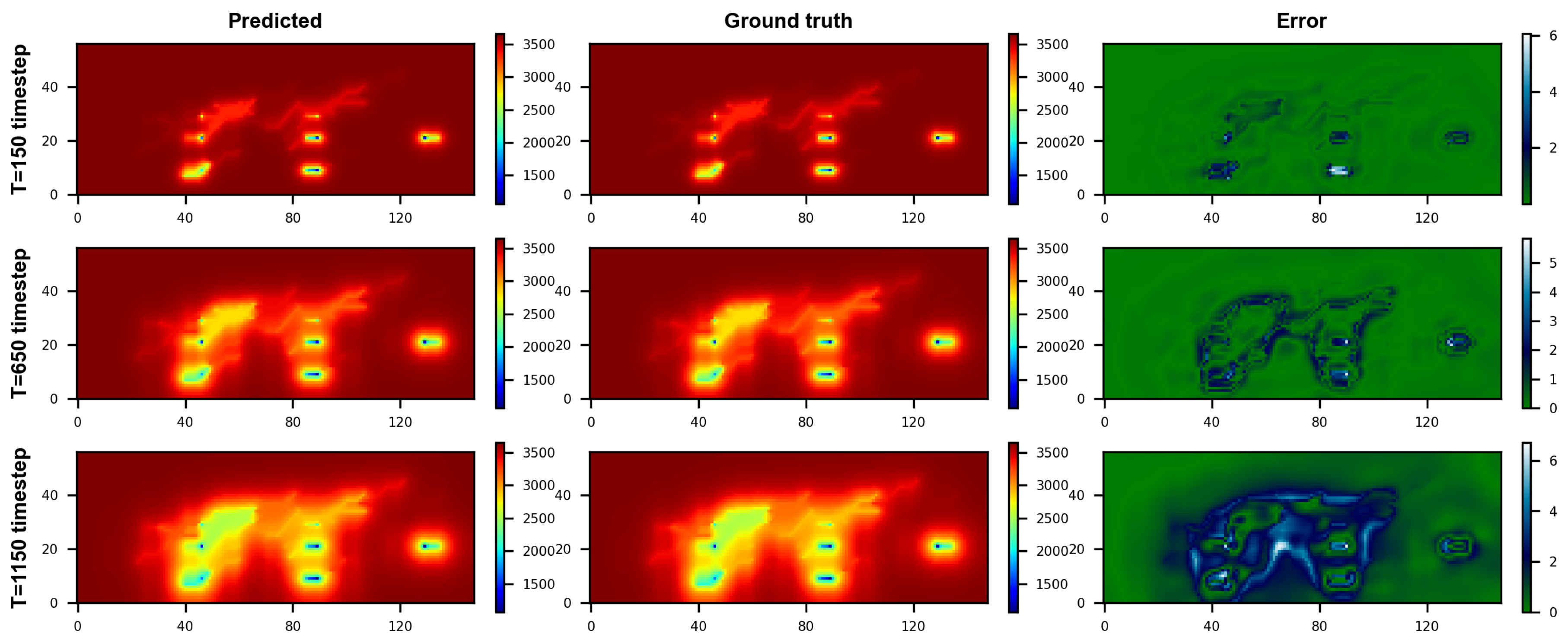
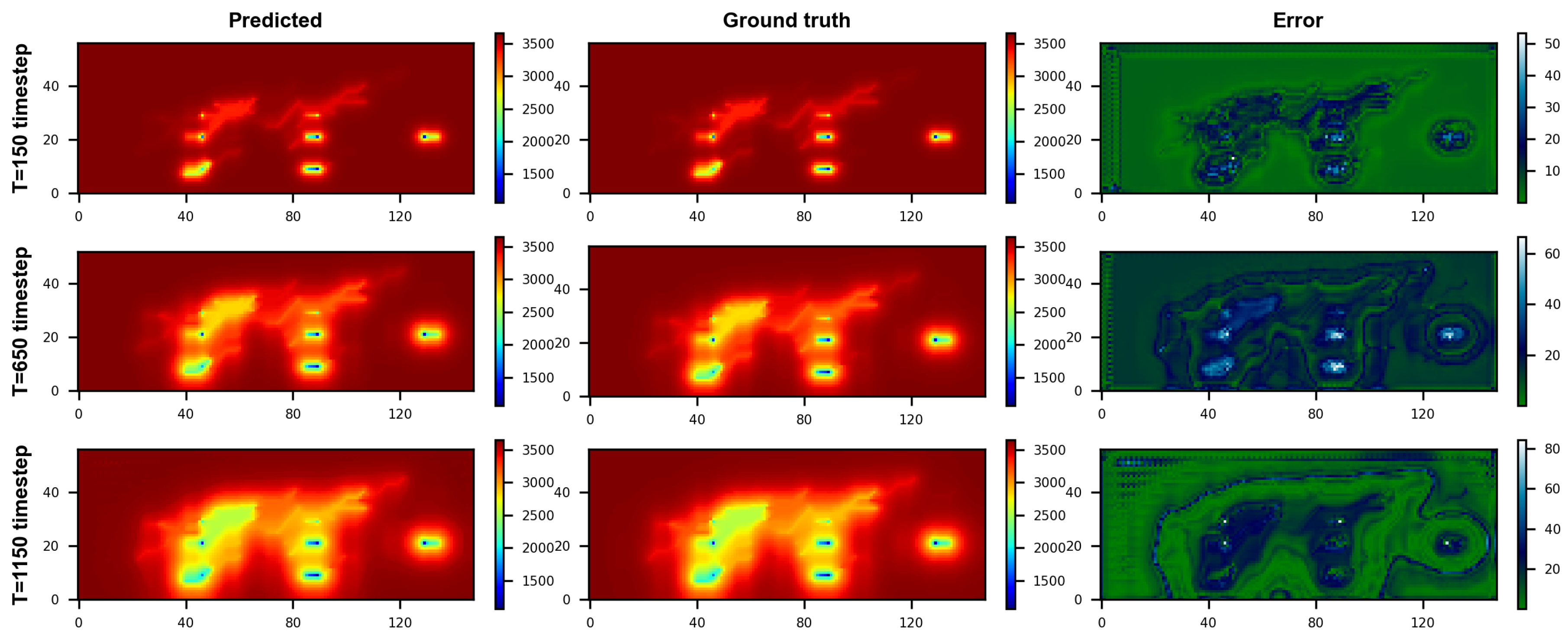
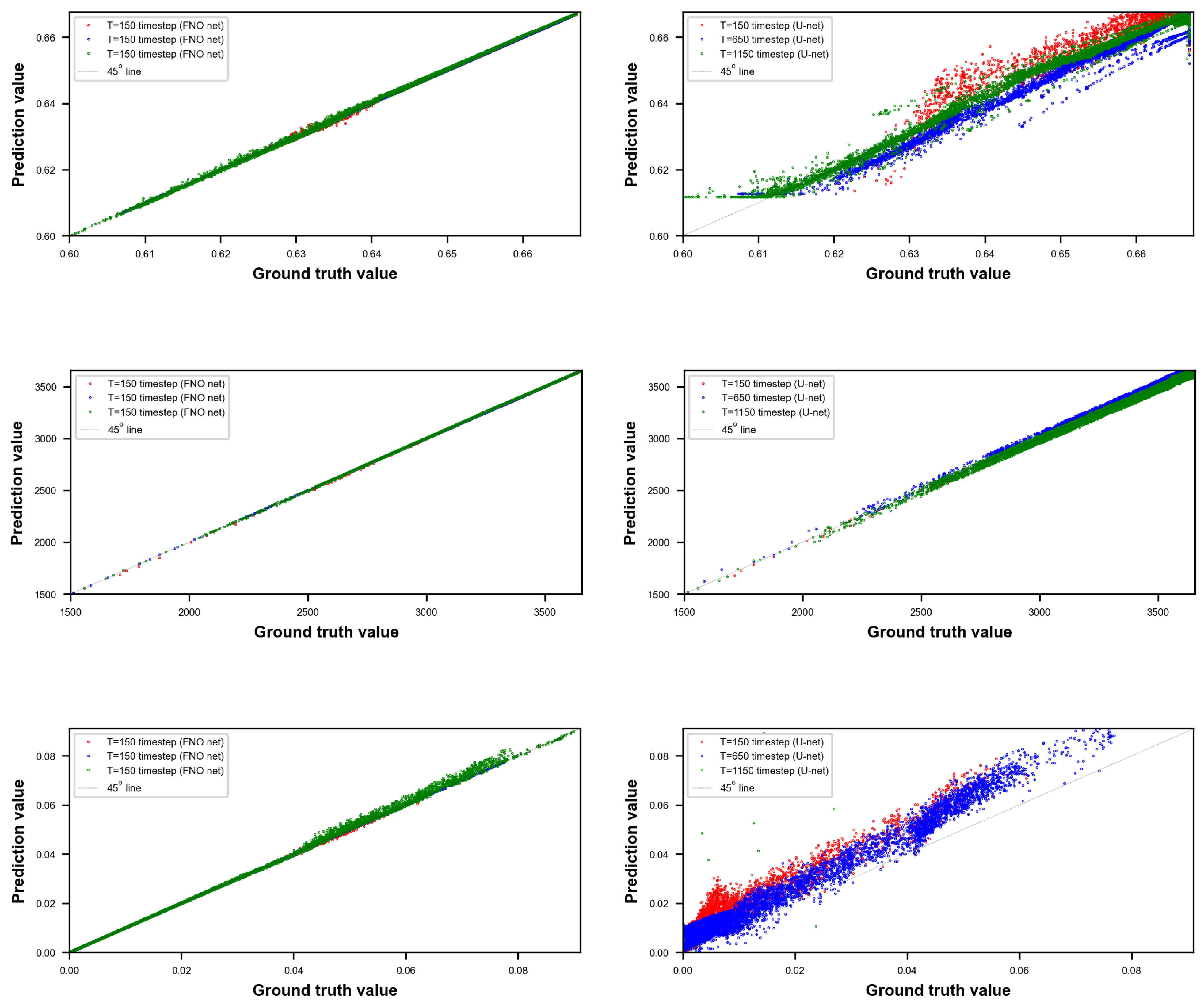
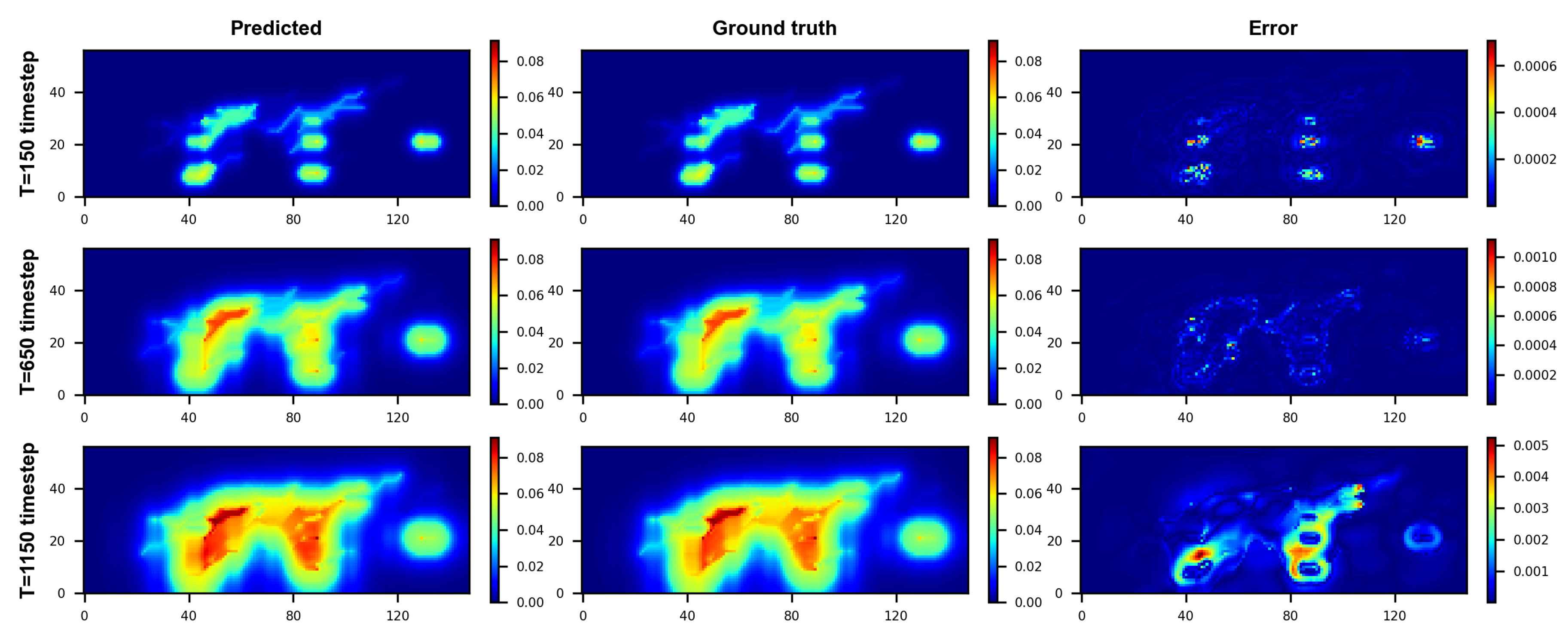
3. Results and Discussion
4. Conclusions
- Our work successfully implemented two current advanced deep learning models to predict subsurface flow in complex fractured reservoirs. The performance of the two models was evaluated from the aspects of computational cost, accuracy, and fracture description;
- By adding initial conditions and boundary conditions to the network loss function, we proved the necessity of adding physical constraints to the data-driven model;
- This work contributes to advancing the understanding of the applicability of FNO-net, and provides new insights into deep learning methods for predicting multiphase flow in complex fractured reservoirs.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| FNO | Fourier neural operator |
| CNN | Convolutional neural network |
| BC | Boundary condition |
| IC | Initial condition |
| FC | Fully connected |
| FEM | Finite element method |
| FVM | Finite volume method |
| EDFM | Embedded discrete fracture modeled |
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Natural Fracture | PERM (mD) | PERMV (mD) | PORO | APERTURE |
|---|---|---|---|---|
| 120 | 1.5 | 0.9 | 0.02 | |
| 400 | 12.5 | 0.5 | 0.04 | |
| 180 | 10.5 | 0.4 | 0.1 | |
| 240 | 4.5 | 0.19 | 0.02 | |
| 185 | 6.5 | 0.16 | 0.08 | |
| 255 | 7.3 | 0.55 | 0.2 | |
| 860 | 1.5 | 0.19 | 0.25 | |
| 385 | 4.5 | 0.29 | 0.25 | |
| 722 | 3.5 | 0.29 | 0.52 | |
| 486 | 4.7 | 0.39 | 0.48 | |
| 510 | 2.6 | 0.69 | 0.83 | |
| 130 | 1.2 | 0.74 | 0.55 | |
| 558 | 1.3 | 0.98 | 0.35 | |
| 650 | 1.55 | 0.78 | 0.53 | |
| 255 | 1.57 | 0.75 | 0.08 | |
| 257 | 1.35 | 0.5 | 0.07 | |
| 357 | 1.55 | 0.94 | 0.07 | |
| 457 | 1.45 | 0.93 | 0.06 | |
| 557 | 1.75 | 0.98 | 0.05 | |
| 740 | 1.65 | 0.89 | 0.04 | |
| 670 | 10.5 | 0.85 | 0.03 | |
| 470 | 12.5 | 0.5 | 0.03 | |
| 650 | 11.6 | 0.3 | 0.03 | |
| 453 | 8.56 | 0.4 | 0.02 | |
| 350 | 7.56 | 0.5 | 0.01 | |
| 620 | 6.53 | 0.54 | 0.1 | |
| 320 | 8.53 | 0.44 | 0.11 | |
| 280 | 5.55 | 0.4 | 0.25 | |
| 356 | 2.65 | 0.3 | 0.11 | |
| 455 | 7.52 | 0.2 | 0.32 | |
| 456 | 1.45 | 0.93 | 0.06 | |
| 655 | 1.75 | 0.98 | 0.05 | |
| 725 | 1.65 | 0.89 | 0.04 | |
| 680 | 10.5 | 0.85 | 0.03 | |
| 450 | 12.5 | 0.5 | 0.03 | |
| 680 | 11.6 | 0.3 | 0.03 | |
| 475 | 8.56 | 0.4 | 0.02 | |
| 356 | 7.56 | 0.5 | 0.01 | |
| 653 | 6.53 | 0.54 | 0.1 | |
| 258 | 8.53 | 0.44 | 0.11 | |
| 655 | 5.55 | 0.4 | 0.25 | |
| 455 | 2.65 | 0.3 | 0.11 |
References
- Mardashov, D.; Duryagin, V.; Islamov, S. Technology for improving the efficiency of fractured reservoir development using gel-forming compositions. Energies 2021, 14, 8254. [Google Scholar] [CrossRef]
- Cao, M.; Sharma, M. An Efficient Model of Simulating Fracture Propagation and Energy Recovery from Naturally Fractured Reservoirs: Effect of Fracture Geometry, Topology and Connectivity. In Proceedings of the SPE Hydraulic Fracturing Technology Conference and Exhibition, The Woodlands, TX, USA, 31 January–2 February 2023. [Google Scholar]
- Ding, M.; Gao, M.; Wang, Y.; Qu, Z.; Chen, X. Experimental study on CO2-EOR in fractured reservoirs: Influence of fracture density, miscibility and production scheme. J. Pet. Sci. Eng. 2019, 174, 476–485. [Google Scholar] [CrossRef]
- van Golf-Racht, T.D. Fundamentals of Fractured Reservoir Engineering; Elsevier: Amsterdam, The Netherlands, 1982. [Google Scholar]
- Gilman, J.R.; Kazemi, H. Improvements in simulation of naturally fractured reservoirs. Soc. Pet. Eng. J. 1983, 23, 695–707. [Google Scholar] [CrossRef]
- Hawez, H.; Sanaee, R.; Faisal, N. Multiphase Flow Modelling in Fractured Reservoirs Using a Novel Computational Fluid Dynamics Approach. In Proceedings of the 55th US Rock Mechanics/Geomechanics Symposium, Online, 18–25 June 2021; OnePetro: Richardson, TX, USA, 2021. [Google Scholar]
- Wu, Y.S. On the effective continuum method for modeling multiphase flow, multicomponent transport, and heat transfer in fractured rock. Dynamics of Fluids in Fractured Rock; John Wiley & Sons, Inc.: New York, NY, USA, 2013. [Google Scholar]
- Warren, J.; Root, P.J. The behavior of naturally fractured reservoirs. Soc. Pet. Eng. J. 1963, 3, 245–255. [Google Scholar] [CrossRef]
- Kazemi, H. Pressure transient analysis of naturally fractured reservoirs with uniform fracture distribution. Soc. Pet. Eng. J. 1969, 9, 451–462. [Google Scholar] [CrossRef]
- Civan, F.; Rai, C.S.; Sondergeld, C.H. Shale-gas permeability and diffusivity inferred by improved formulation of relevant retention and transport mechanisms. Transp. Porous Media 2011, 86, 925–944. [Google Scholar] [CrossRef]
- Dehghanpour, H.; Shirdel, M. A triple porosity model for shale gas reservoirs. In Proceedings of the Canadian Unconventional Resources Conference, Houston, TX, USA, 26–28 July 2021; OnePetro: Richardson, TX, USA, 2011. [Google Scholar]
- Yan, B.; Wang, Y.; Killough, J.E. Beyond dual-porosity modeling for the simulation of complex flow mechanisms in shale reservoirs. Comput. Geosci. 2016, 20, 69–91. [Google Scholar] [CrossRef]
- Xu, Z.; Huang, Z.; Yang, Y. The hybrid-dimensional Darcy’s law: A non-conforming reinterpreted discrete fracture model (RDFM) for single-phase flow in fractured media. J. Comput. Phys. 2023, 473, 111749. [Google Scholar] [CrossRef]
- Koohbor, B.; Fahs, M.; Hoteit, H.; Doummar, J.; Younes, A.; Belfort, B. An advanced discrete fracture model for variably saturated flow in fractured porous media. Adv. Water Resour. 2020, 140, 103602. [Google Scholar] [CrossRef]
- Garipov, T.; Karimi-Fard, M.; Tchelepi, H. Discrete fracture model for coupled flow and geomechanics. Comput. Geosci. 2016, 20, 149–160. [Google Scholar] [CrossRef]
- Wang, L.; Golfier, F.; Tinet, A.J.; Chen, W.; Vuik, C. An efficient adaptive implicit scheme with equivalent continuum approach for two-phase flow in fractured vuggy porous media. Adv. Water Resour. 2022, 163, 104186. [Google Scholar] [CrossRef]
- Xiong, X.; Devegowda, D.; Michel, G.; Sigal, R.F.; Civan, F. A fully-coupled free and adsorptive phase transport model for shale gas reservoirs including non-Darcy flow effects. In Proceedings of the SPE Annual Technical Conference and Exhibition, San Antonio, TX, USA, 8–10 October 2012; OnePetro: Richardson, TX, USA, 2012. [Google Scholar]
- Snow, D.T. A Parallel Plate Model of Fractured Permeable Media; University of California: Berkeley, CA, USA, 1965. [Google Scholar]
- Moinfar, A.; Varavei, A.; Sepehrnoori, K.; Johns, R.T. Development of an efficient embedded discrete fracture model for 3D compositional reservoir simulation in fractured reservoirs. SPE J. 2014, 19, 289–303. [Google Scholar] [CrossRef]
- Ţene, M.; Bosma, S.B.; Al Kobaisi, M.S.; Hajibeygi, H. Projection-based embedded discrete fracture model (pEDFM). Adv. Water Resour. 2017, 105, 205–216. [Google Scholar] [CrossRef]
- Fang, S.; Cheng, L.; Ayala, L.F. A coupled boundary element and finite element method for the analysis of flow through fractured porous media. J. Pet. Sci. Eng. 2017, 152, 375–390. [Google Scholar] [CrossRef]
- Du, X.; Cheng, L.; Liu, Y.; Rao, X.; Ma, M.; Cao, R.; Zhou, J. Application of 3D embedded discrete fracture model for simulating CO2-EOR and geological storage in fractured reservoirs. IOP Conf. Ser. Earth Environ. Sci. 2020, 467, 012013. [Google Scholar] [CrossRef]
- Matthäi, S.K.; Mezentsev, A.; Belayneh, M. Control-volume finite-element two-phase flow experiments with fractured rock represented by unstructured 3D hybrid meshes. In Proceedings of the SPE Reservoir Simulation Symposium, Houston, TX, USA, 31 January–2 February 2005; OnePetro: Richardson, TX, USA, 2005. [Google Scholar]
- D’Angelo, C.; Scotti, A. A mixed finite element method for Darcy flow in fractured porous media with non-matching grids. ESAIM Math. Model. Numer. Anal. 2012, 46, 465–489. [Google Scholar] [CrossRef]
- Chu, A.K.; Benson, S.M.; Wen, G. Deep-Learning-Based Flow Prediction for CO2 Storage in Shale–Sandstone Formations. Energies 2023, 16, 246. [Google Scholar] [CrossRef]
- He, X.; Santoso, R.; Hoteit, H. Application of machine-learning to construct equivalent continuum models from high-resolution discrete-fracture models. In Proceedings of the International Petroleum Technology Conference, Dhahran, Saudi Arabia, 13–15 January 2020; OnePetro: Richardson, TX, USA, 2020. [Google Scholar]
- Xu, H.; Zhang, D.; Zeng, J. Deep-learning of parametric partial differential equations from sparse and noisy data. Phys. Fluids 2021, 33, 037132. [Google Scholar] [CrossRef]
- Raissi, M.; Perdikaris, P.; Karniadakis, G.E. Physics-informed neural networks: A deep learning framework for solving forward and inverse problems involving nonlinear partial differential equations. J. Comput. Phys. 2019, 378, 686–707. [Google Scholar] [CrossRef]
- Pan, S.; Duraisamy, K. Physics-informed probabilistic learning of linear embeddings of nonlinear dynamics with guaranteed stability. SIAM J. Appl. Dyn. Syst. 2020, 19, 480–509. [Google Scholar] [CrossRef]
- Mo, S.; Zhu, Y.; Zabaras, N.; Shi, X.; Wu, J. Deep convolutional encoder-decoder networks for uncertainty quantification of dynamic multiphase flow in heterogeneous media. Water Resour. Res. 2019, 55, 703–728. [Google Scholar] [CrossRef]
- Tan, X.; Chen, W.; Qin, C.; Zhao, W.; Ye, W. Characterisation for spatial distribution of mining-induced stress through deep learning algorithm on SHM data. Georisk: Assess. Manag. Risk Eng. Syst. Geohazards 2023, 17, 217–226. [Google Scholar] [CrossRef]
- Takbiri-Borujeni, A.; Kazemi, H.; Nasrabadi, N. A data-driven surrogate to image-based flow simulations in porous media. Comput. Fluids 2020, 201, 104475. [Google Scholar] [CrossRef]
- Wang, N.; Chang, H.; Zhang, D. Surrogate and inverse modeling for two-phase flow in porous media via theory-guided convolutional neural network. J. Comput. Phys. 2022, 466, 111419. [Google Scholar] [CrossRef]
- Li, Z.; Kovachki, N.; Azizzadenesheli, K.; Liu, B.; Bhattacharya, K.; Stuart, A.; Anandkumar, A. Fourier neural operator for parametric partial differential equations. arXiv 2020, arXiv:2010.08895. [Google Scholar]
- Wen, G.; Li, Z.; Azizzadenesheli, K.; Anandkumar, A.; Benson, S.M. U-FNO—An enhanced Fourier neural operator-based deep-learning model for multiphase flow. Adv. Water Resour. 2022, 163, 104180. [Google Scholar] [CrossRef]
- Zhang, K.; Zuo, Y.; Zhao, H.; Ma, X.; Gu, J.; Wang, J.; Yang, Y.; Yao, C.; Yao, J. Fourier neural operator for solving subsurface oil/water two-phase flow partial differential equation. SPE J. 2022, 27, 1815–1830. [Google Scholar] [CrossRef]
- Coats, K.H.; Thomas, L.; Pierson, R. Compositional and black oil reservoir simulation. In Proceedings of the SPE Reservoir Simulation Symposium, San Antonio, TX, USA, 12–15 February 1995; OnePetro: Richardson, TX, USA, 1995. [Google Scholar]
- Chen, Z. Formulations and numerical methods of the black oil model in porous media. SIAM J. Numer. Anal. 2000, 38, 489–514. [Google Scholar] [CrossRef]
- Li, J.; Tomin, P.; Tchelepi, H. Sequential fully implicit newton method for flow and transport with natural black-oil formulation. Comput. Geosci. 2023. [Google Scholar] [CrossRef]
- Li, L.; Lee, S.H. Efficient field-scale simulation of black oil in a naturally fractured reservoir through discrete fracture networks and homogenized media. SPE Reserv. Eval. Eng. 2008, 11, 750–758. [Google Scholar] [CrossRef]
- Li, Z.; Kovachki, N.; Azizzadenesheli, K.; Liu, B.; Bhattacharya, K.; Stuart, A.; Anandkumar, A. Neural operator: Graph kernel network for partial differential equations. arXiv 2020, arXiv:2003.03485. [Google Scholar]
- LeCun, Y.; Bottou, L.; Bengio, Y.; Haffner, P. Gradient-based learning applied to document recognition. Proc. IEEE 1998, 86, 2278–2324. [Google Scholar] [CrossRef]
- Long, J.; Shelhamer, E.; Darrell, T. Fully convolutional networks for semantic segmentation. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Boston, MA, USA, 7–12 June 2015; pp. 3431–3440. [Google Scholar]
- Ronneberger, O.; Fischer, P.; Brox, T. U-net: Convolutional networks for biomedical image segmentation. In Proceedings of the Medical Image Computing and Computer-Assisted Intervention–MICCAI 2015: 18th International Conference, Munich, Germany, 5–9 October 2015; Springer: Berlin, Germany, 2015. Part III 18. pp. 234–241. [Google Scholar]
- Goodfellow, I.; Bengio, Y.; Courville, A. Deep Learning; MIT Press: Cambridge, MA, USA, 2016. [Google Scholar]
- Younis, R.M. Modern Advances in Software and Solution Algorithms for Reservoir Simulation; Stanford University: Stanford, CA, USA, 2011. [Google Scholar]
- Zhou, Y. Parallel General-Purpose Reservoir Simulation with Coupled Reservoir Models and Multisegment Wells. Ph.D. Thesis, Stanford University, Stanford, CA, USA, 2012. [Google Scholar]
- Remy, N.; Boucher, A.; Wu, J.; Li, T. Applied Geostatistics with SGeMS; Computer Software; Cambridge University Press: Cambridge, UK, 2009. [Google Scholar]
- Pecha, M.; Horák, D. Analyzing L1-loss and L2-loss support vector machines implemented in PERMON toolbox. In Proceedings of the International Conference on Advanced Engineering Theory and Applications, Bogota, Colombia, 6–8 November 2018; Springer: Berlin, Germany, 2018; pp. 13–23. [Google Scholar]
- Kingma, D.P.; Ba, J. Adam: A method for stochastic optimization. arXiv 2014, arXiv:1412.6980. [Google Scholar]













| Network Layer | Output Shape |
|---|---|
| Frequency mode k, width | (4, 1) |
| Input | |
| Padding | |
| Linear | |
| :Fourier3d/conv3d/BatchNorm3d | |
| :Fourier3d/conv3d/BatchNorm3d | |
| :Fourier3d/conv3d/BatchNorm3d | |
| :Fourier3d/conv3d/BatchNorm3d | |
| :Fourier3d/conv3d/BatchNorm3d | |
| Projection1 | |
| Projection2 | |
| Output |
| Network Layer | Output Shape |
|---|---|
| Input | |
| Conv2d/ReLu/Conv2d/ReLu | |
| MaxPool2d/ Conv2d/ReLu/Conv2d/ReLu | |
| MaxPool2d/ Conv2d/ReLu/Conv2d/ReLu | |
| Conv2d/ReLu/Conv2d/ReLu | |
| Conv2d/ReLu/Conv2d/ReLu | |
| Upsampled/Conv2d/ReLu/Conv2d/ReLu | |
| Upsampled/Conv2d/ReLu/Conv2d/ReLu | |
| Conv2d/ReLu/Conv2d/ReLu | |
| Output |
| Model | Per Epoch Time (s) | Ease of Use | Order of Error | The Ability to Describe Fractures |
|---|---|---|---|---|
| FNO-net | 2.6 | Easy | Fully describe | |
| U-net | 51.2 | Easy | Partially describe |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kuang, T.; Liu, J.; Yin, Z.; Jing, H.; Lan, Y.; Lan, Z.; Pan, H. Fast and Robust Prediction of Multiphase Flow in Complex Fractured Reservoir Using a Fourier Neural Operator. Energies 2023, 16, 3765. https://doi.org/10.3390/en16093765
Kuang T, Liu J, Yin Z, Jing H, Lan Y, Lan Z, Pan H. Fast and Robust Prediction of Multiphase Flow in Complex Fractured Reservoir Using a Fourier Neural Operator. Energies. 2023; 16(9):3765. https://doi.org/10.3390/en16093765
Chicago/Turabian StyleKuang, Tie, Jianqiao Liu, Zhilin Yin, Hongbin Jing, Yubo Lan, Zhengkai Lan, and Huanquan Pan. 2023. "Fast and Robust Prediction of Multiphase Flow in Complex Fractured Reservoir Using a Fourier Neural Operator" Energies 16, no. 9: 3765. https://doi.org/10.3390/en16093765