
Design and Analysis of the Inlet Valve for the CFETR Torus Cryopump

Abstract
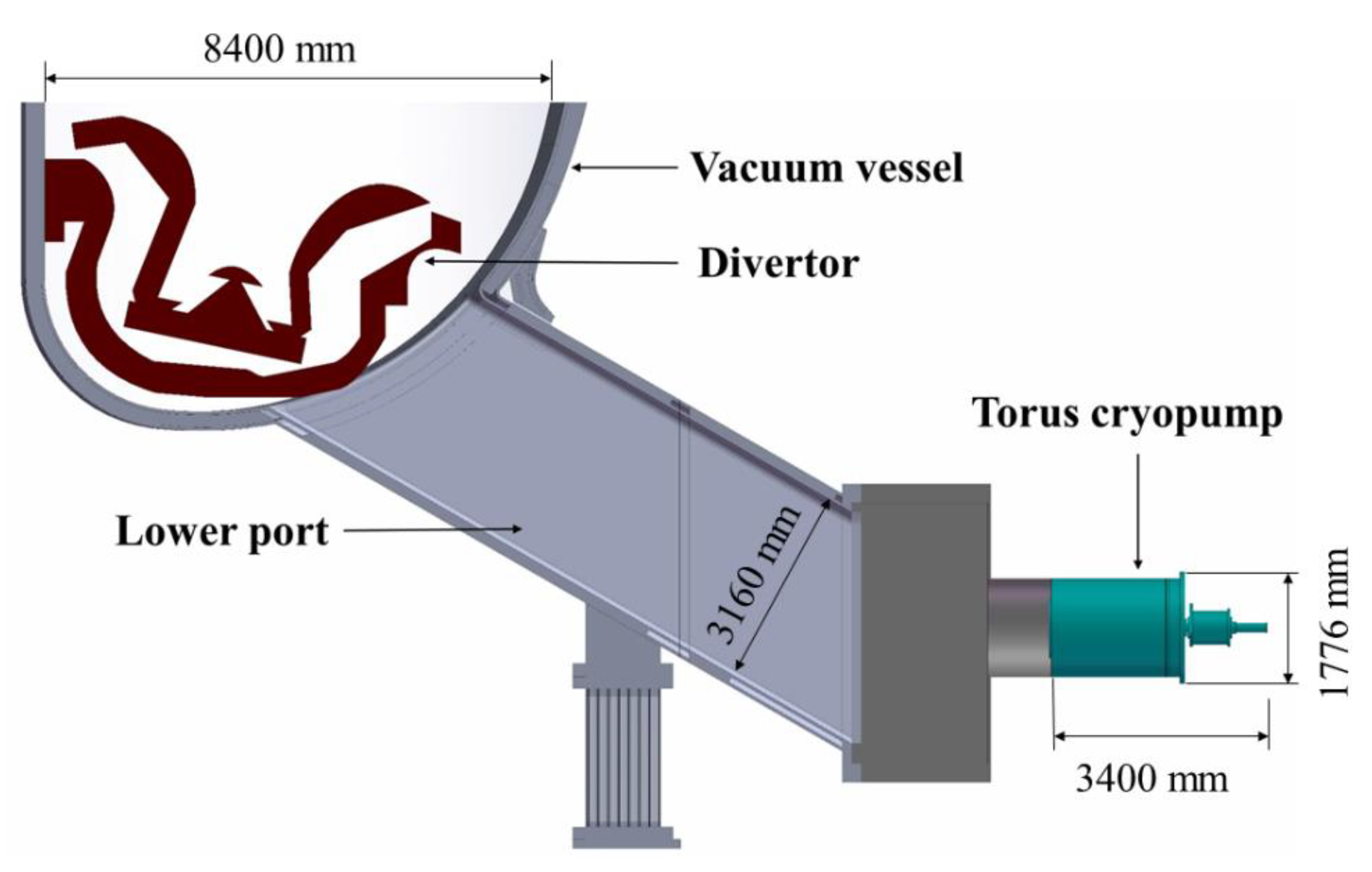
:1. Introduction
- (1)
- It isolates the cryopump from the plasma for regeneration by closing the inlet valve;
- (2)
- It controls the pumping speed of the cryopump by adjusting the inlet valve opening;
- (3)
- It operates as a pressure relief valve in case of a failure, such as the cryopipe breaking inside the cryopump chamber.
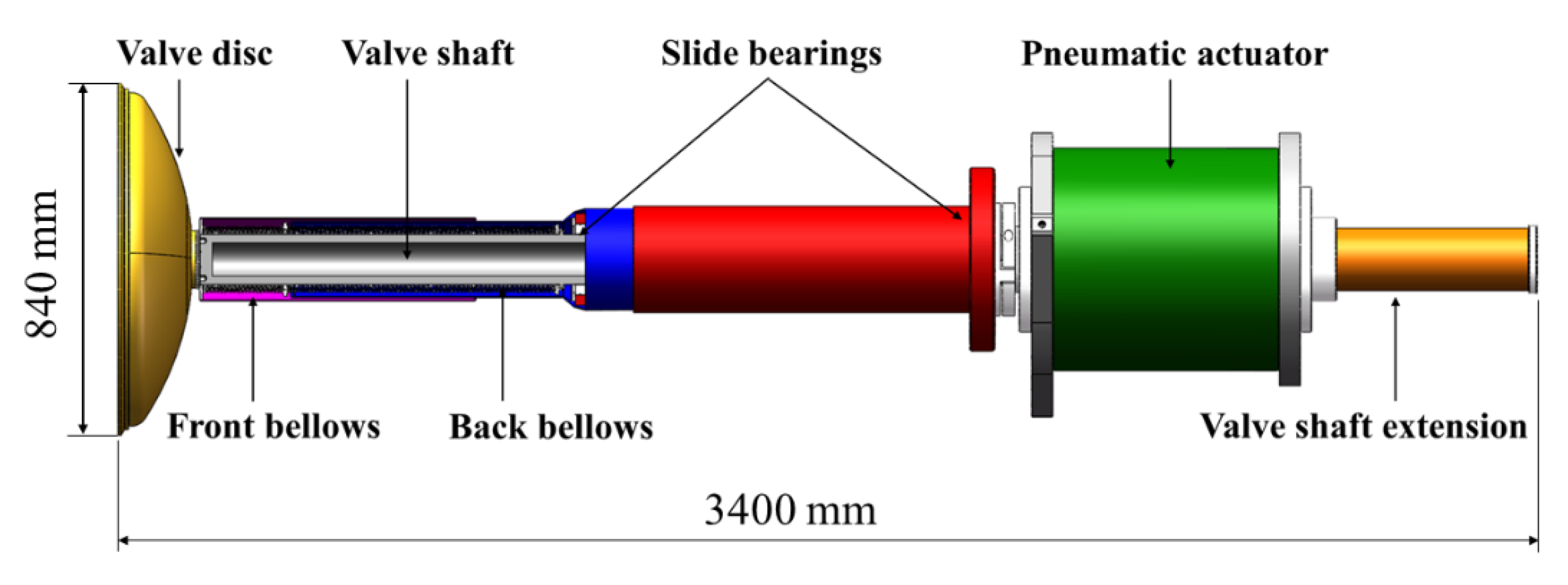
2. Structure Design of the Inlet Valve
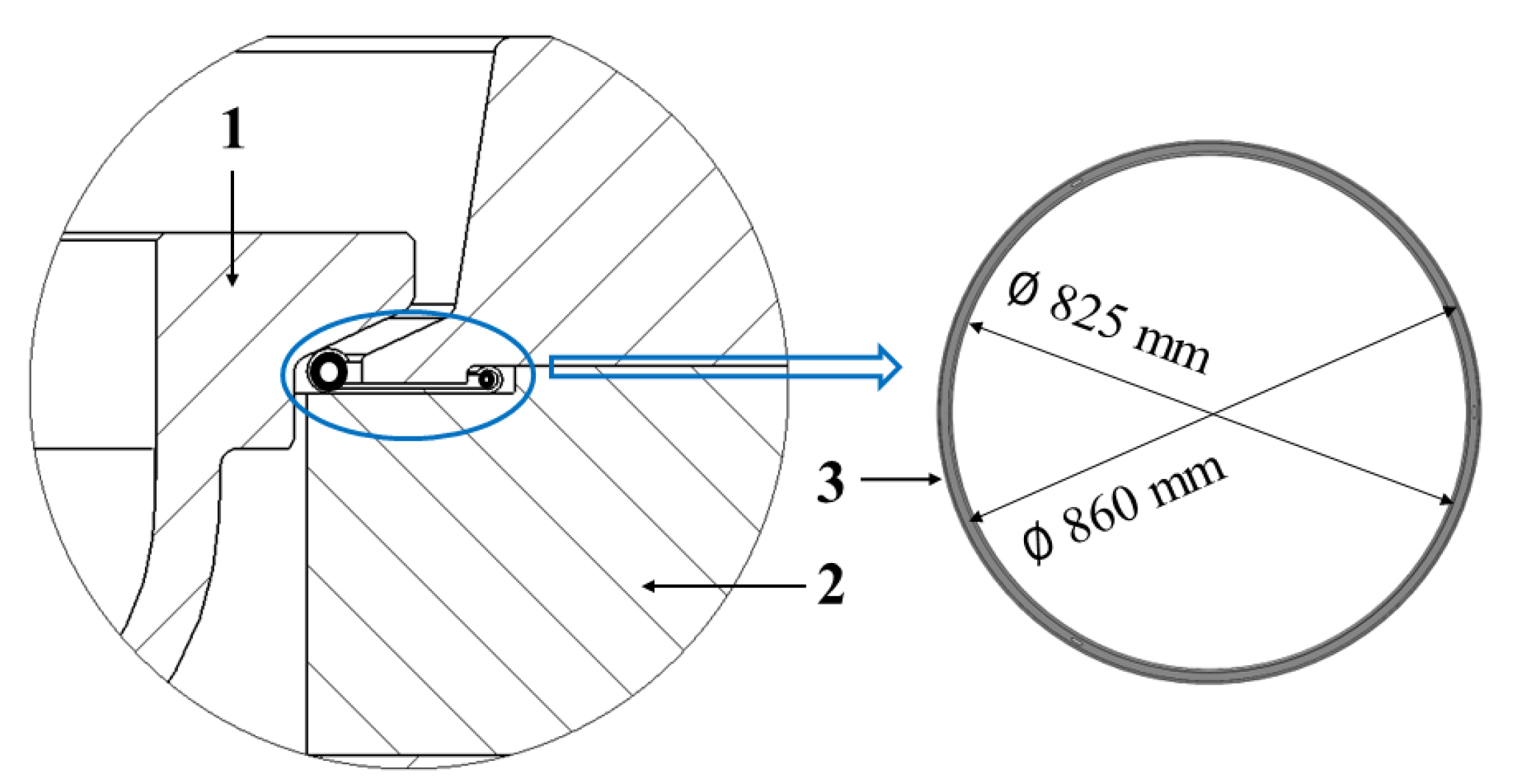
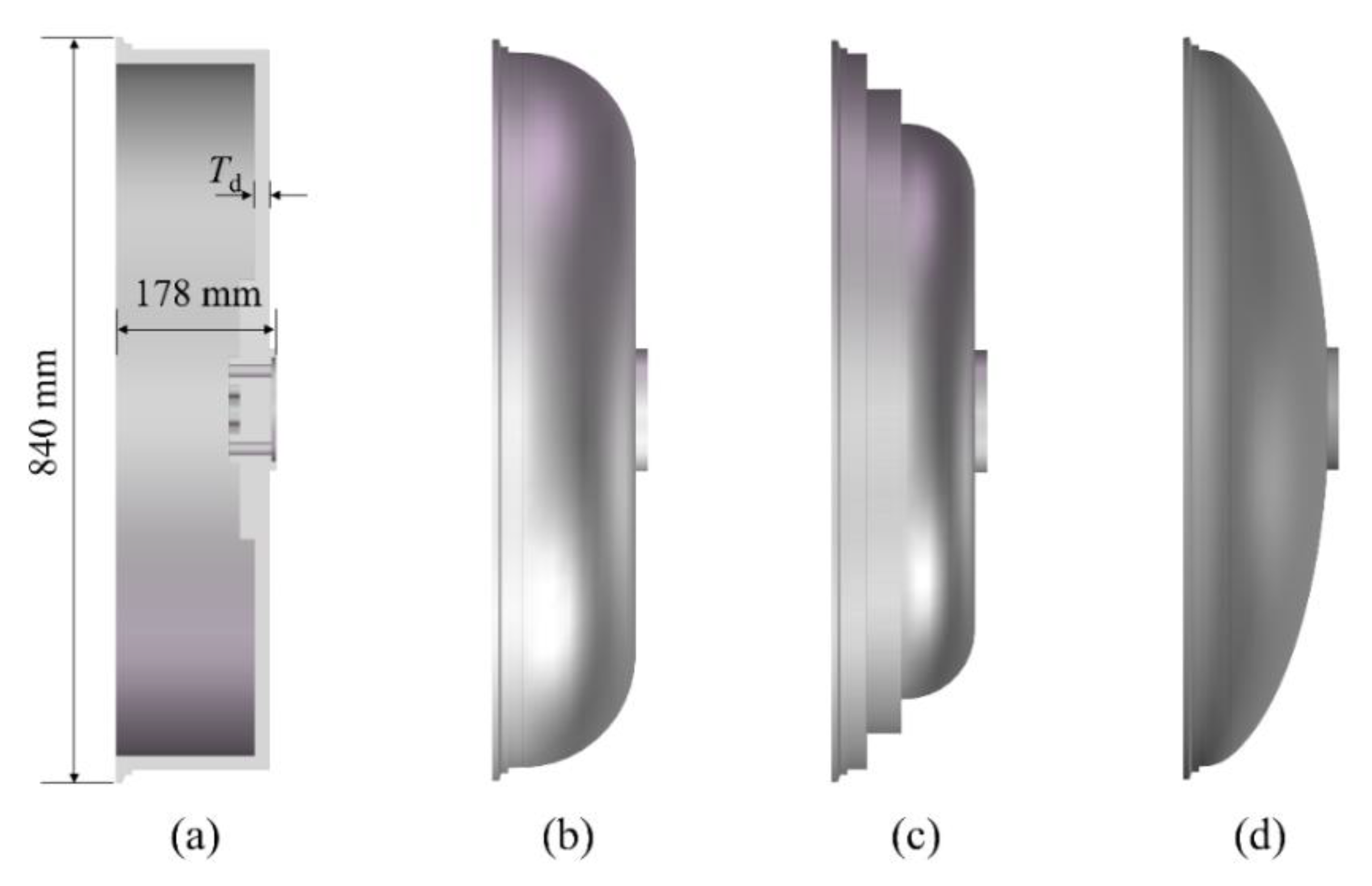
2.1. Valve Disc with Its Sealing Part
2.2. Valve Shaft
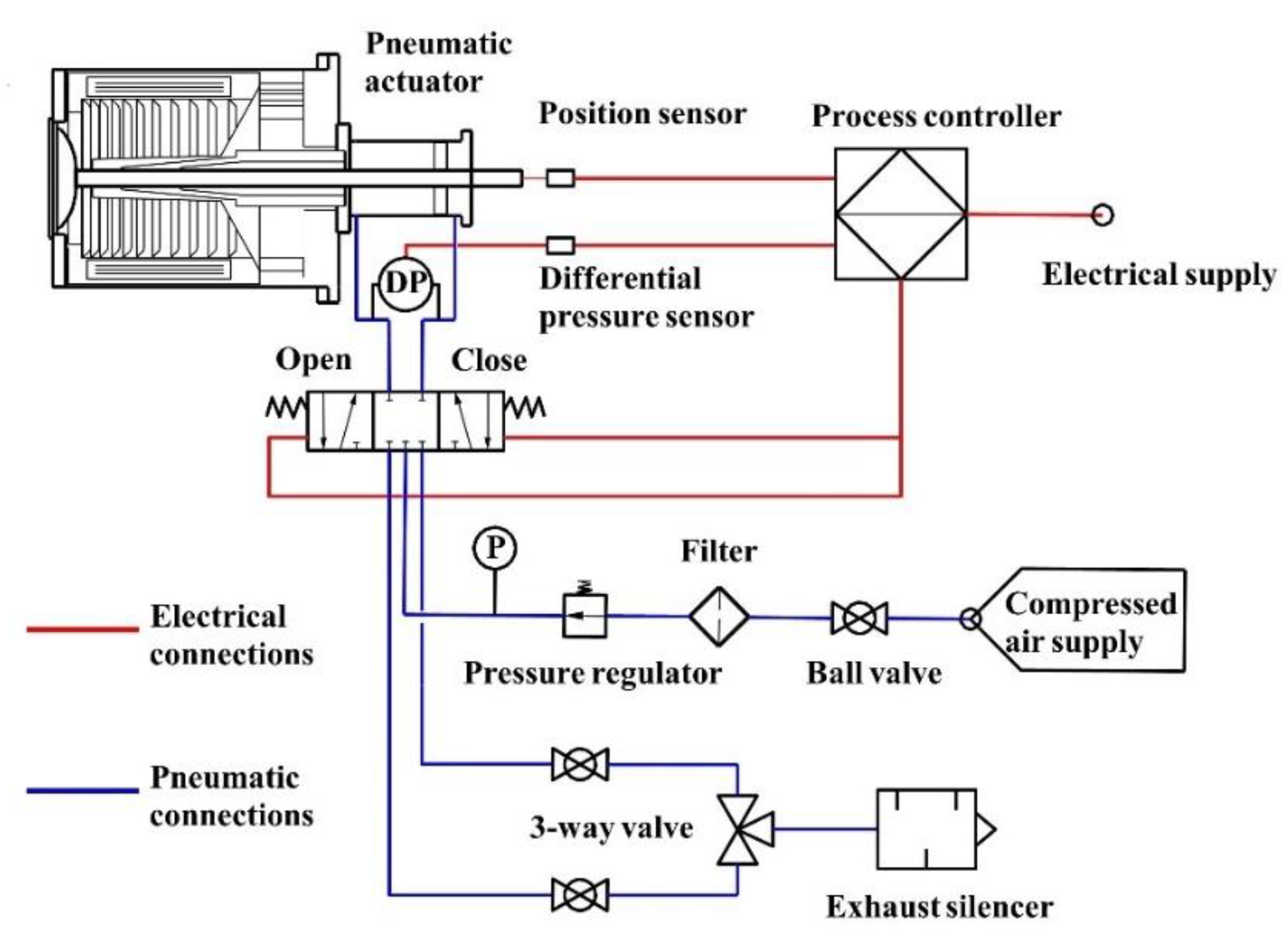
2.3. Pneumatic Actuator
- (1)
- The actuator shall interlock with the inlet valve so that one is allowed to open with any significant pressure rise within the pump chamber;
- (2)
- It provides the power that moves the inlet valve back and force to regulate the inlet flow between 0 and 100%;
- (3)
- The maximum time for complete opening or closure is no more than 10 s;
- (4)
- The inlet valve can be moved with an accuracy of 1 mm;
- (5)
- It limits the exhaust noise of the actuator to acceptable level ≤ 75 dB;
- (6)
- For the operation at CFETR, about 30,000 cycles without maintenance are expected.
3. Simulation Methods
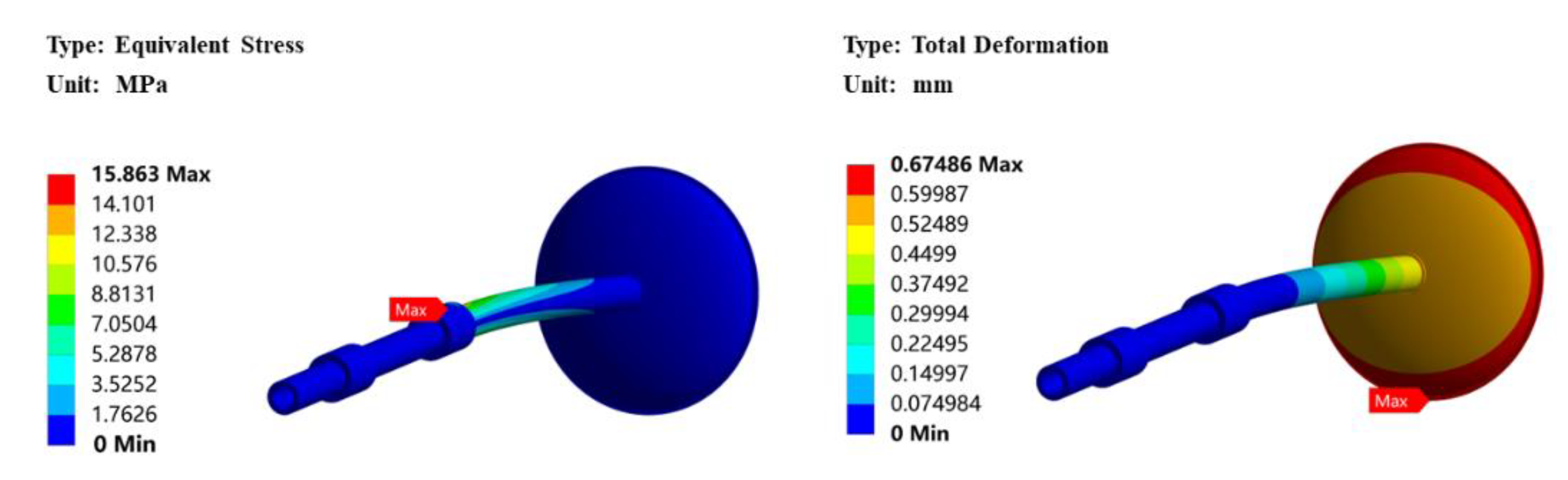
3.1. Mechanical Analysis of the Inlet Valve
3.2. Estimation of the Transmission Probability
3.2.1. Design Target Function
3.2.2. Physical Model
3.2.3. Gas Flow Model
3.3. Boundary Conditions and Settings
3.3.1. Mechanical Analysis of the Valve Disc
- (1)
- The sealing surface of the valve disc is set as fixed support, and the contact surface between the valve disc and the valve shaft is set as force surface;
- (2)
- The sealing force is 150 kN;
3.3.2. Mechanical Analysis of Valve Shaft
- (1)
- The surfaces of the slide bearings are set as fixed support;
- (2)
- The contact type between the valve shaft and the bearing is set to friction, and the friction coefficient is 0.01;
- (3)
- Gravity.
3.3.3. Estimation of the Transmission Probability
- (1)
- The expression of transmission probability;
- (2)
- Temperature;
- (3)
- Gas throughput;
- (4)
- Sticking coefficient.
3.3.4. Seismic Analysis
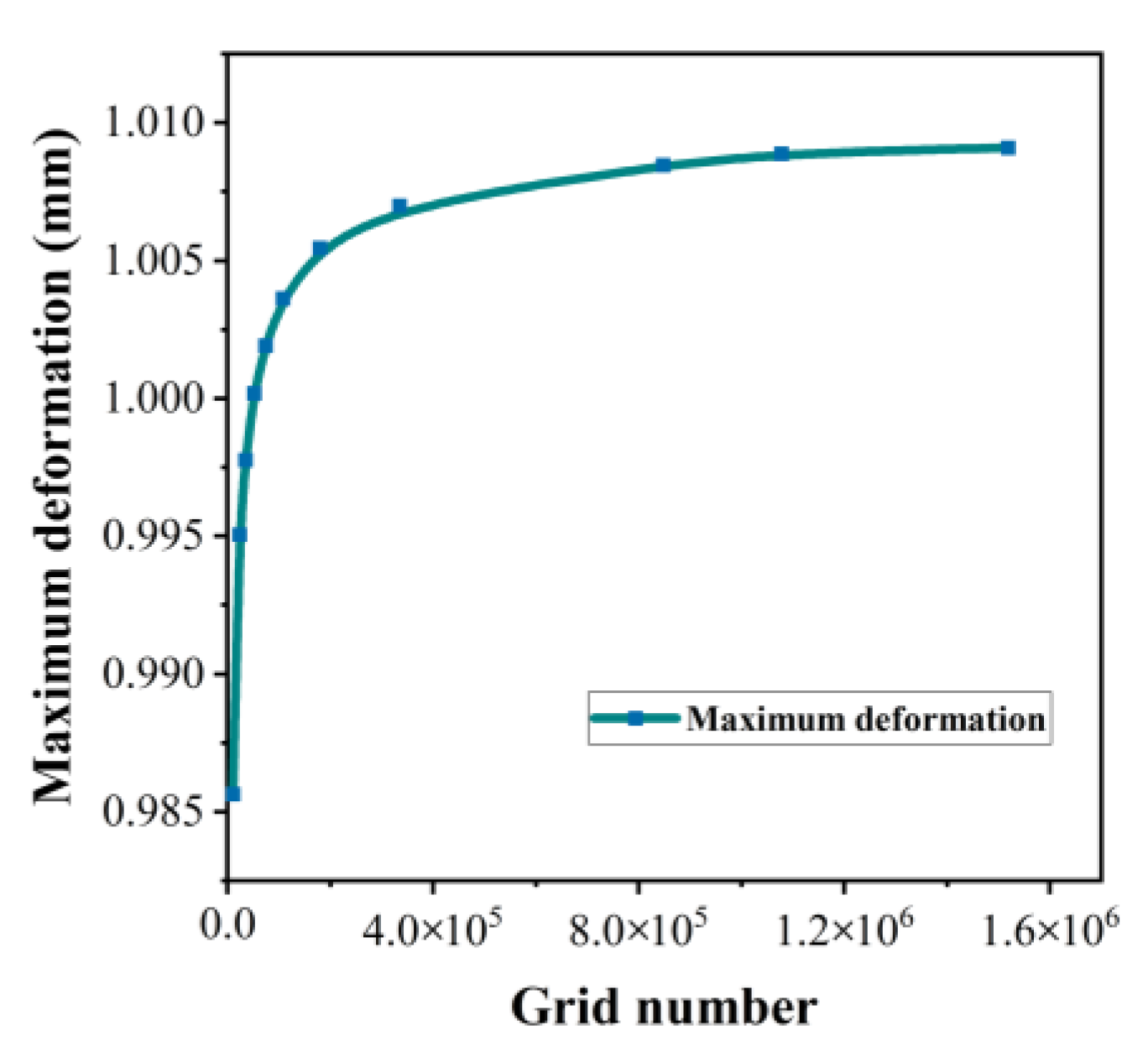
3.4. Grid Independence Investigation
3.5. Validity of Calculation by Monte Carlo Method Investigation
4. Result and Discussion
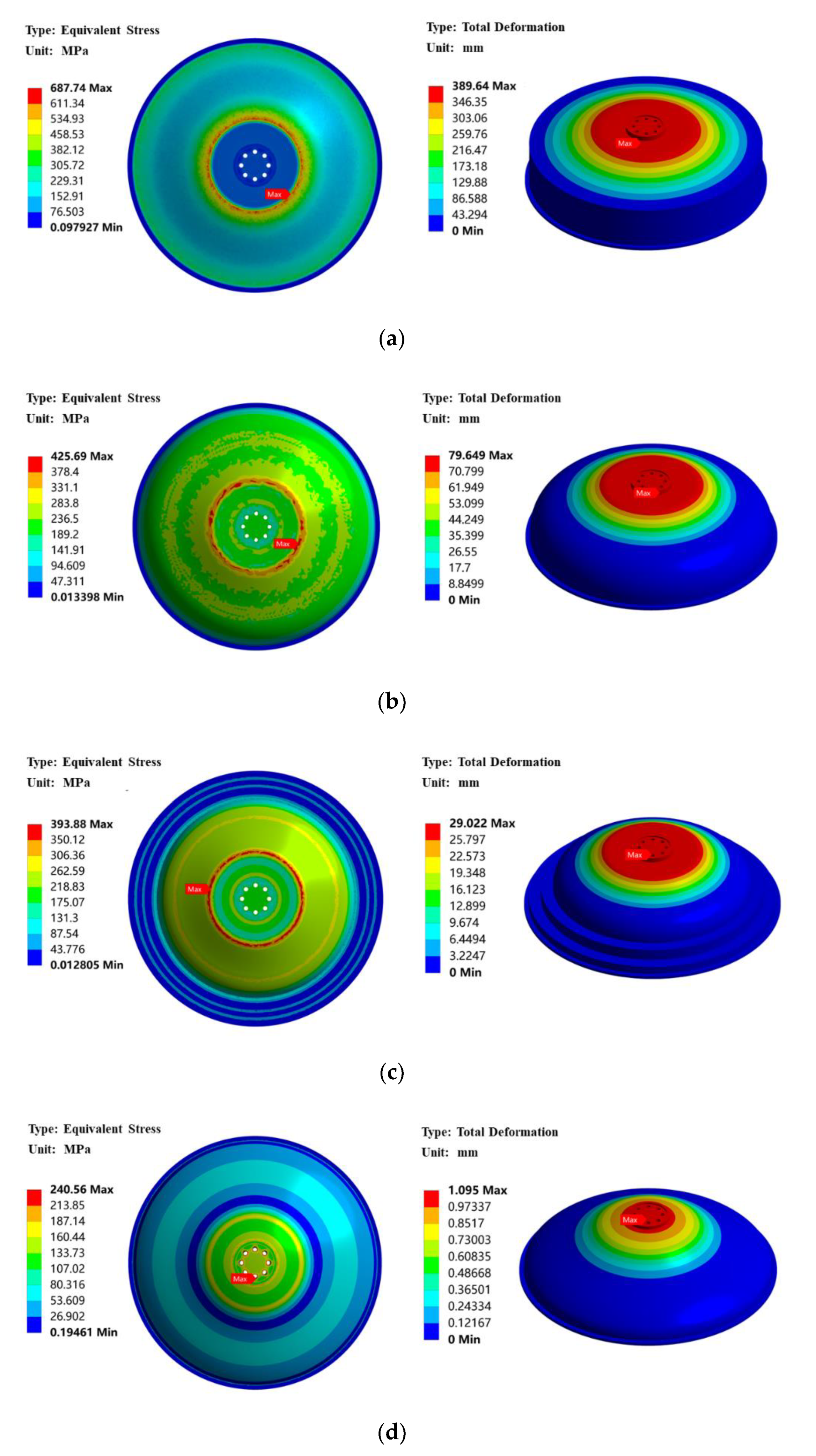
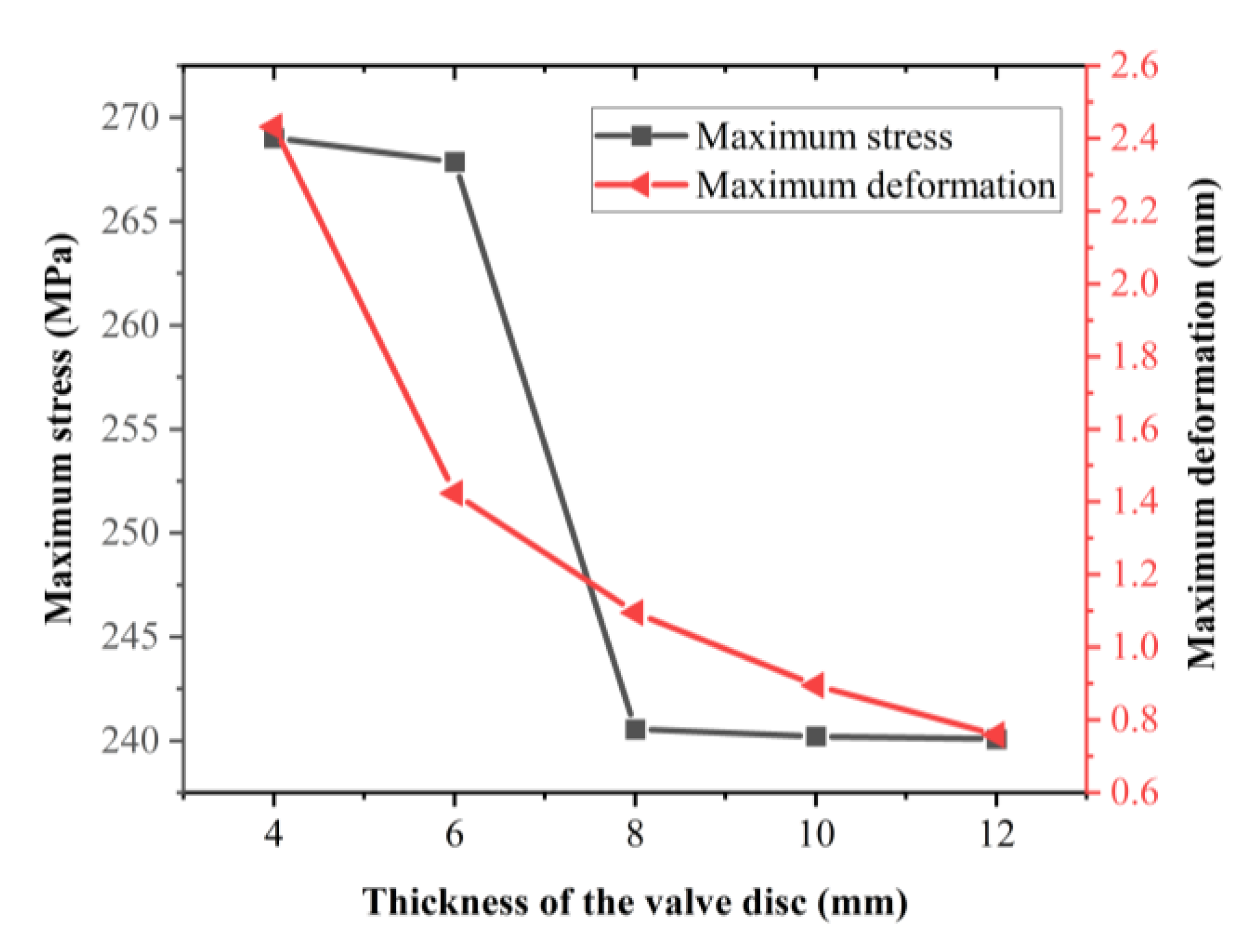
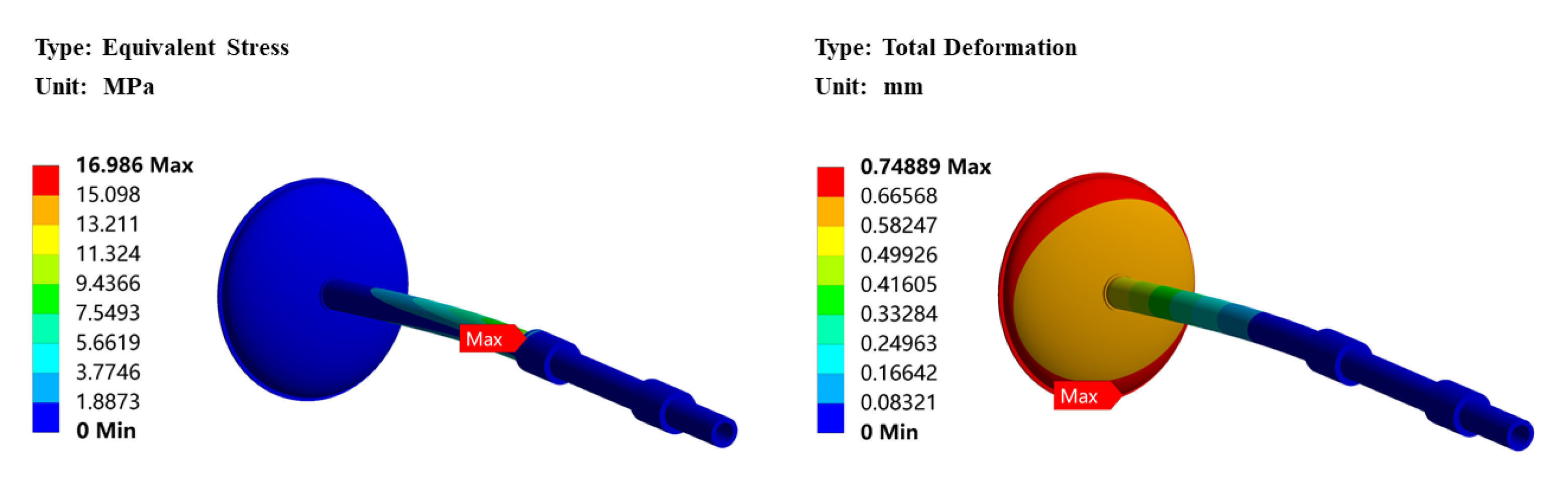
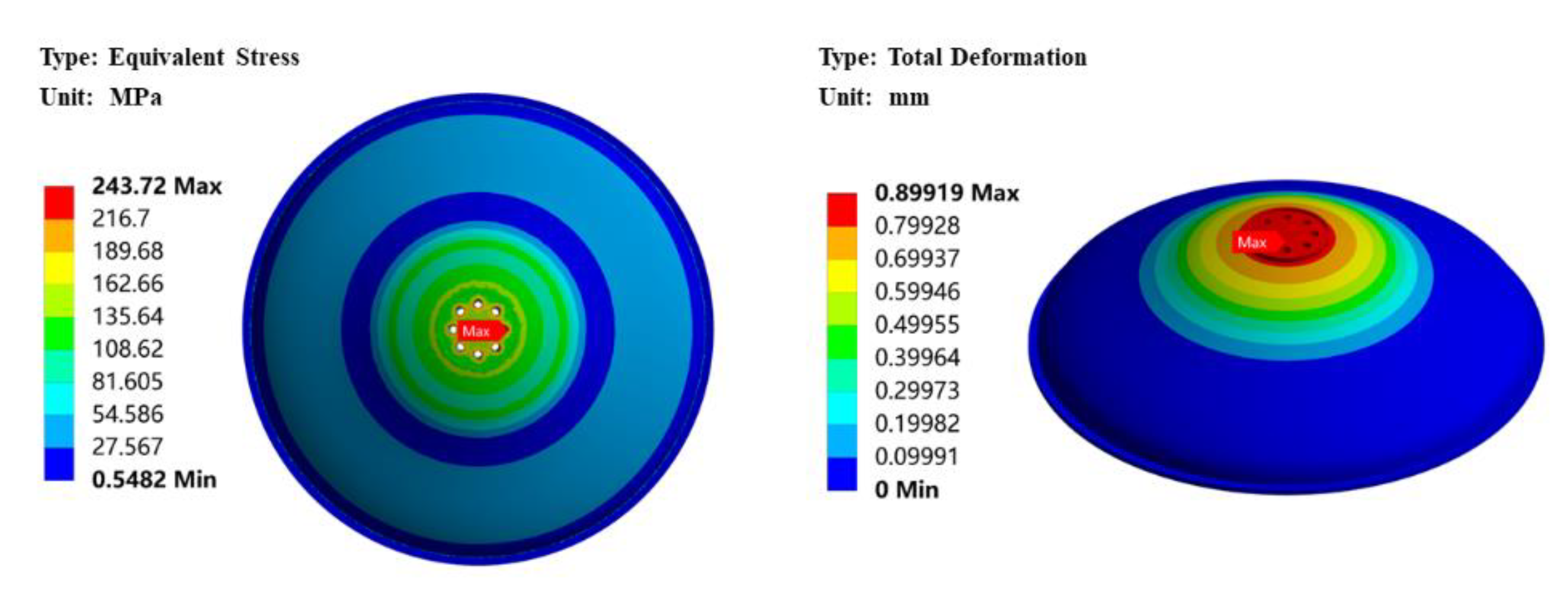
4.1. Finite Element Analysis and Assessment of Valve Discs
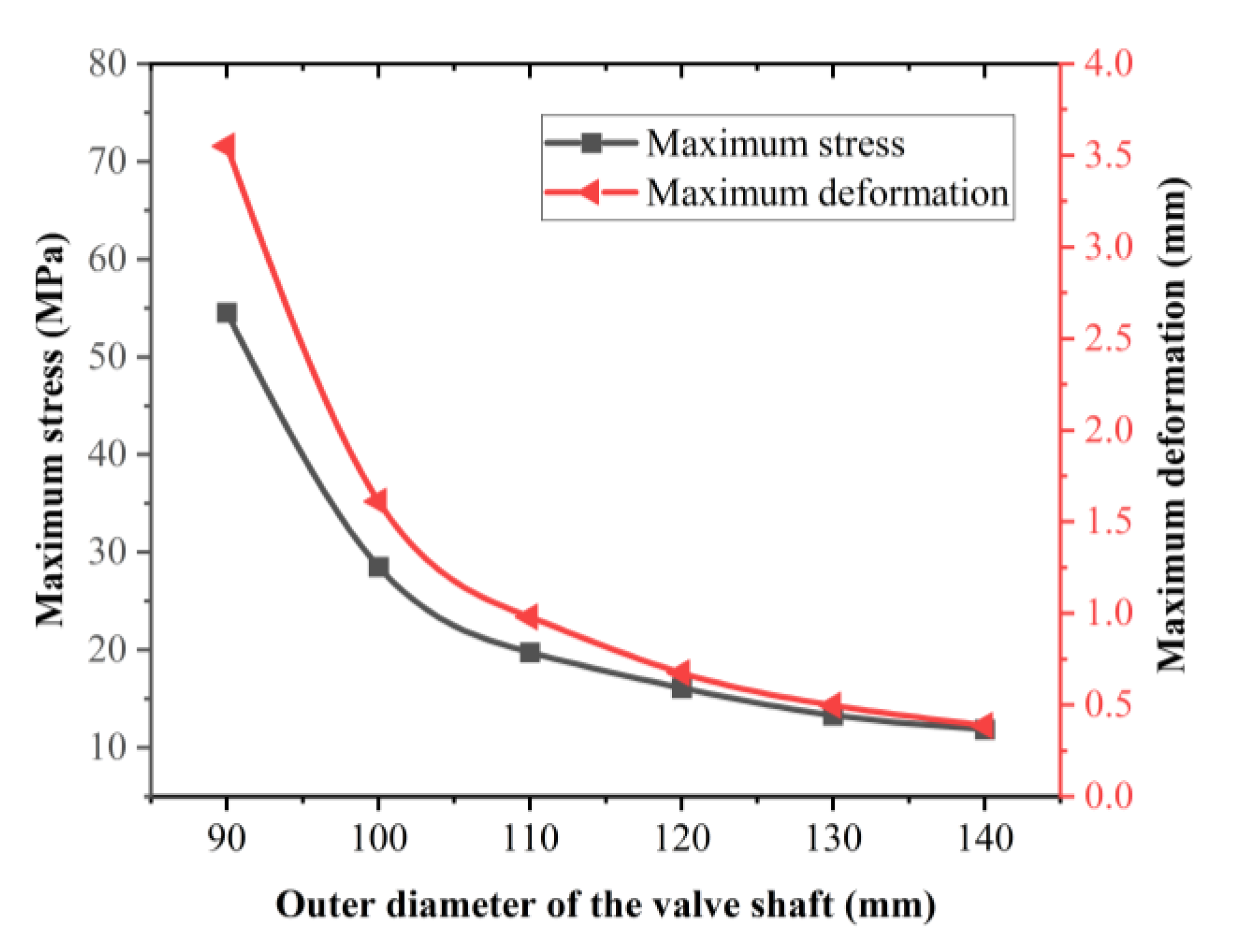
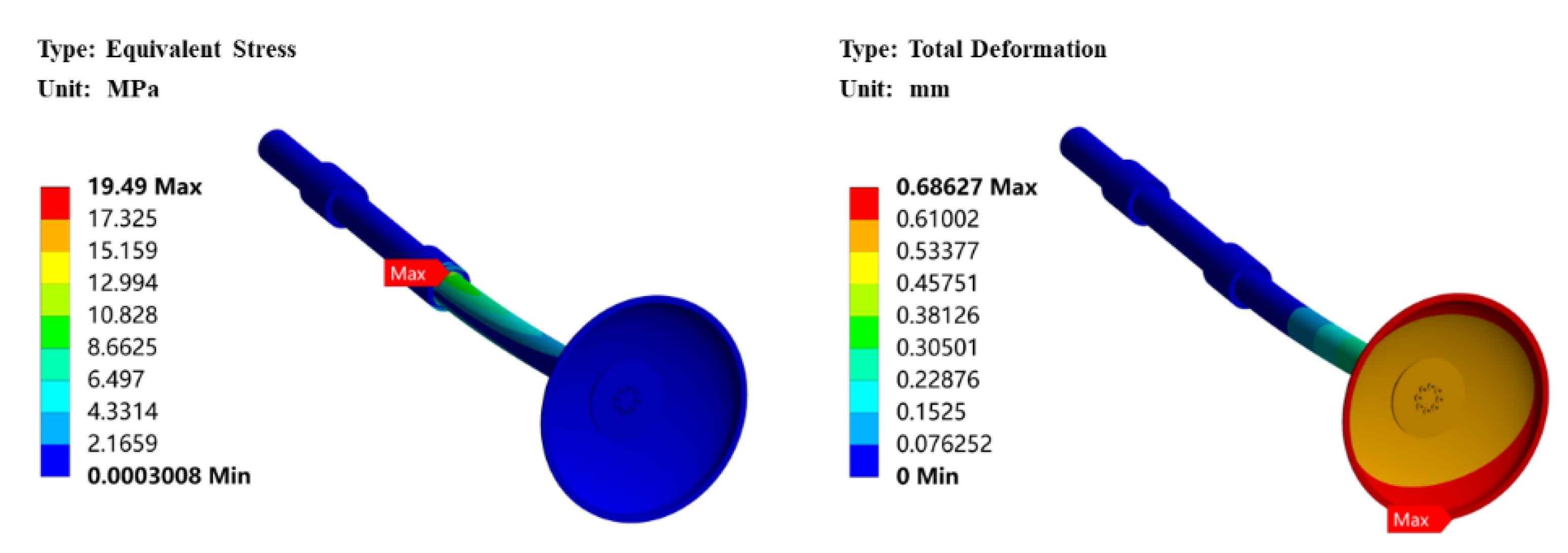
4.2. The Effect of Thickness of the Valve Shaft on Bending Deflection of the Inlet Valve
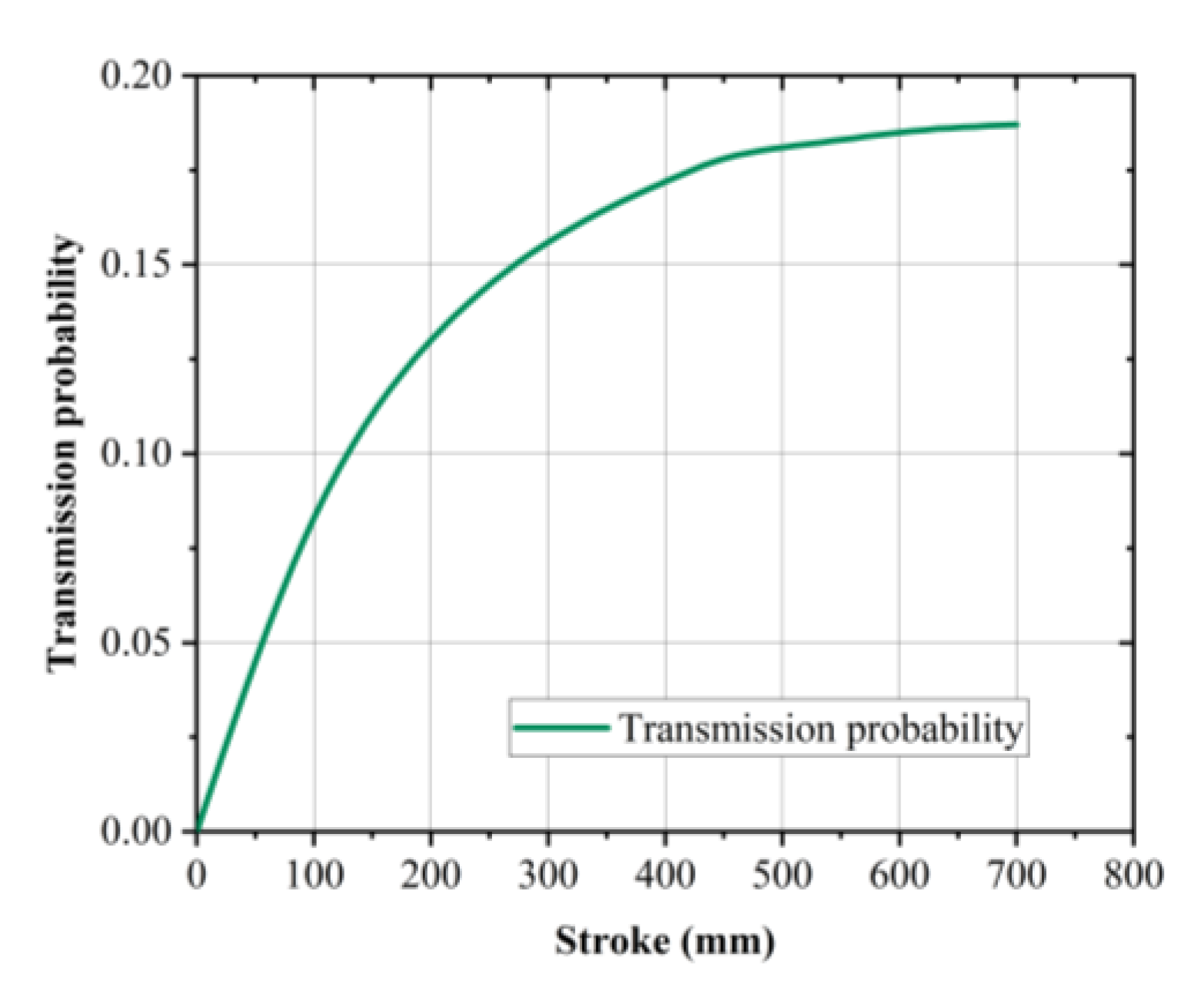
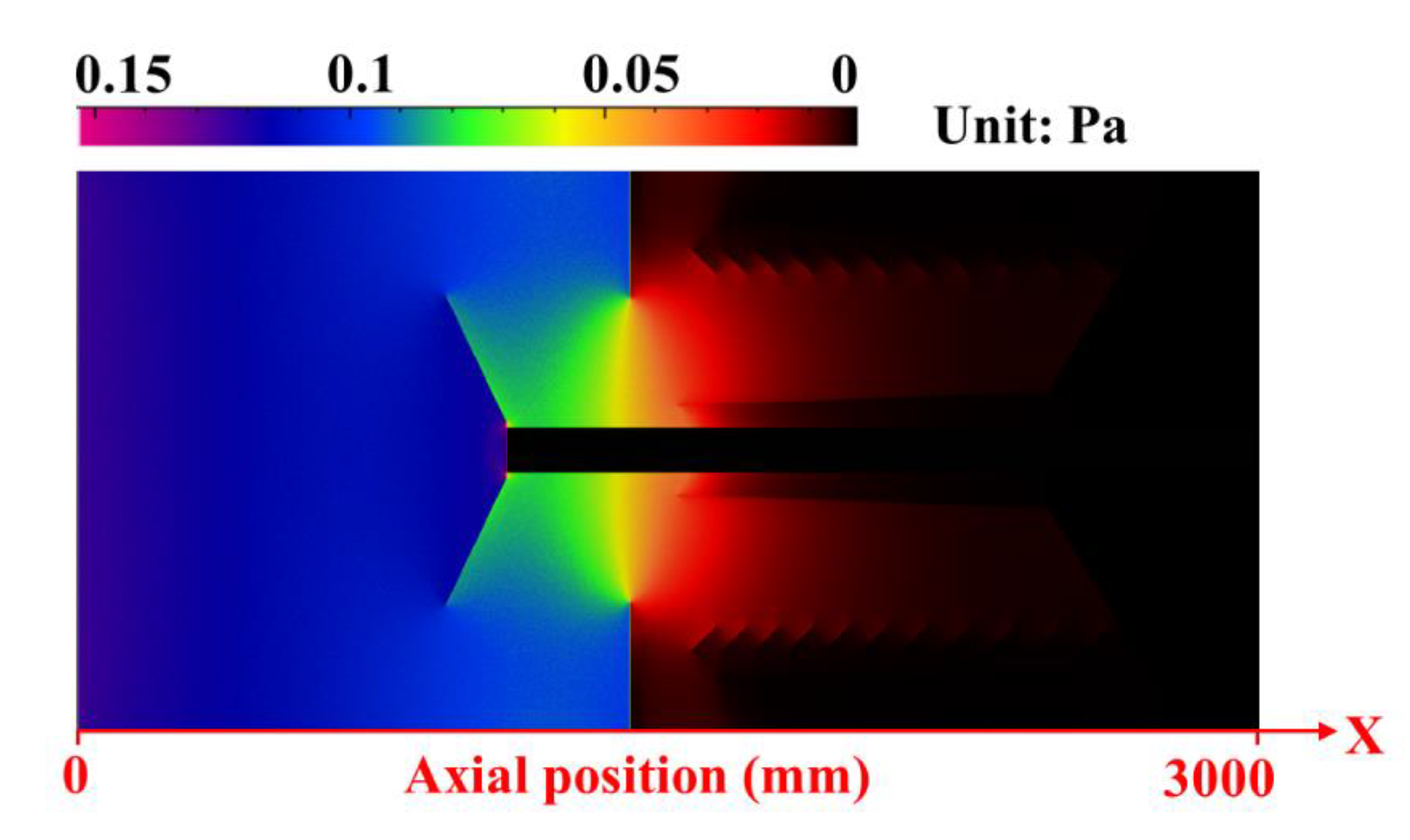
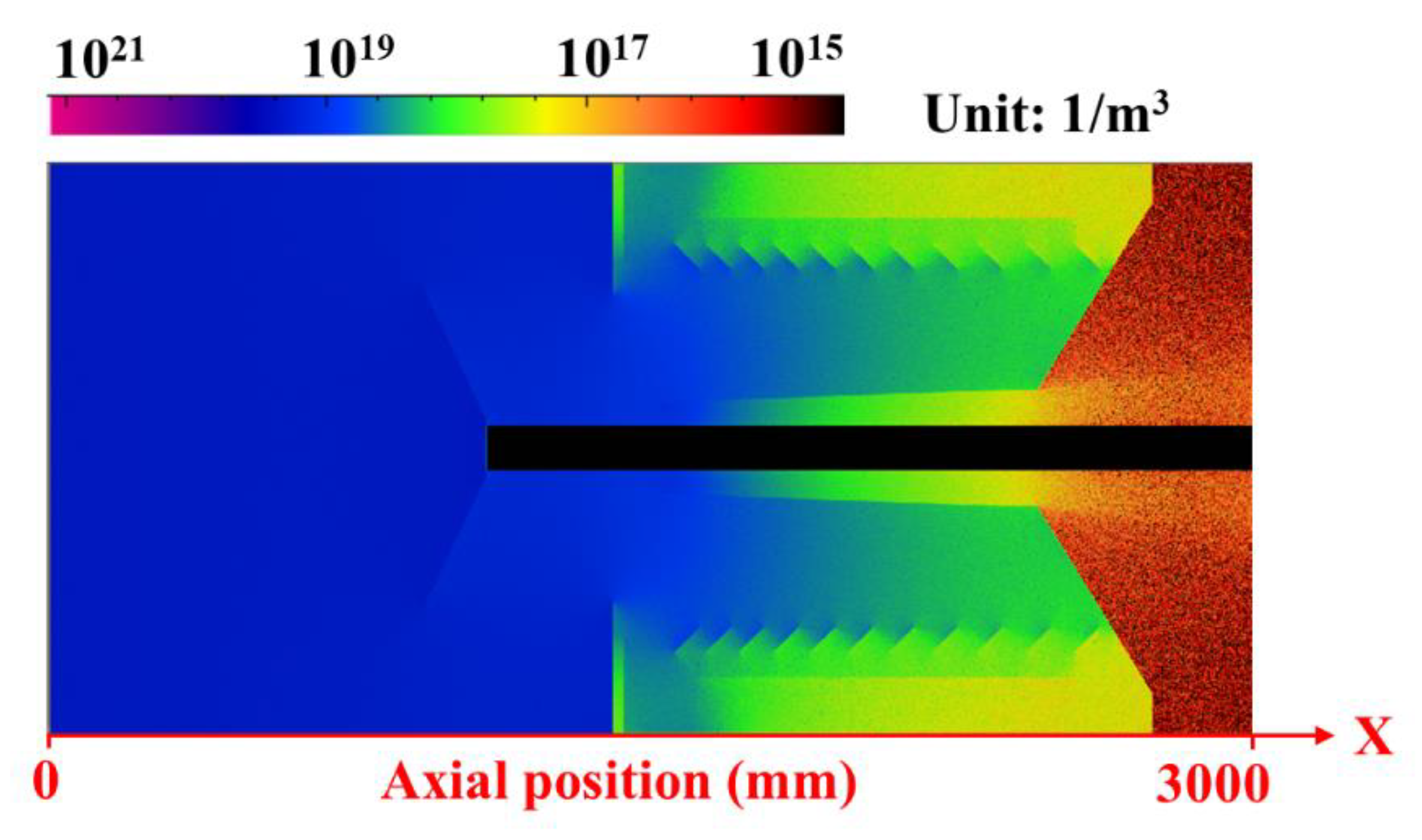
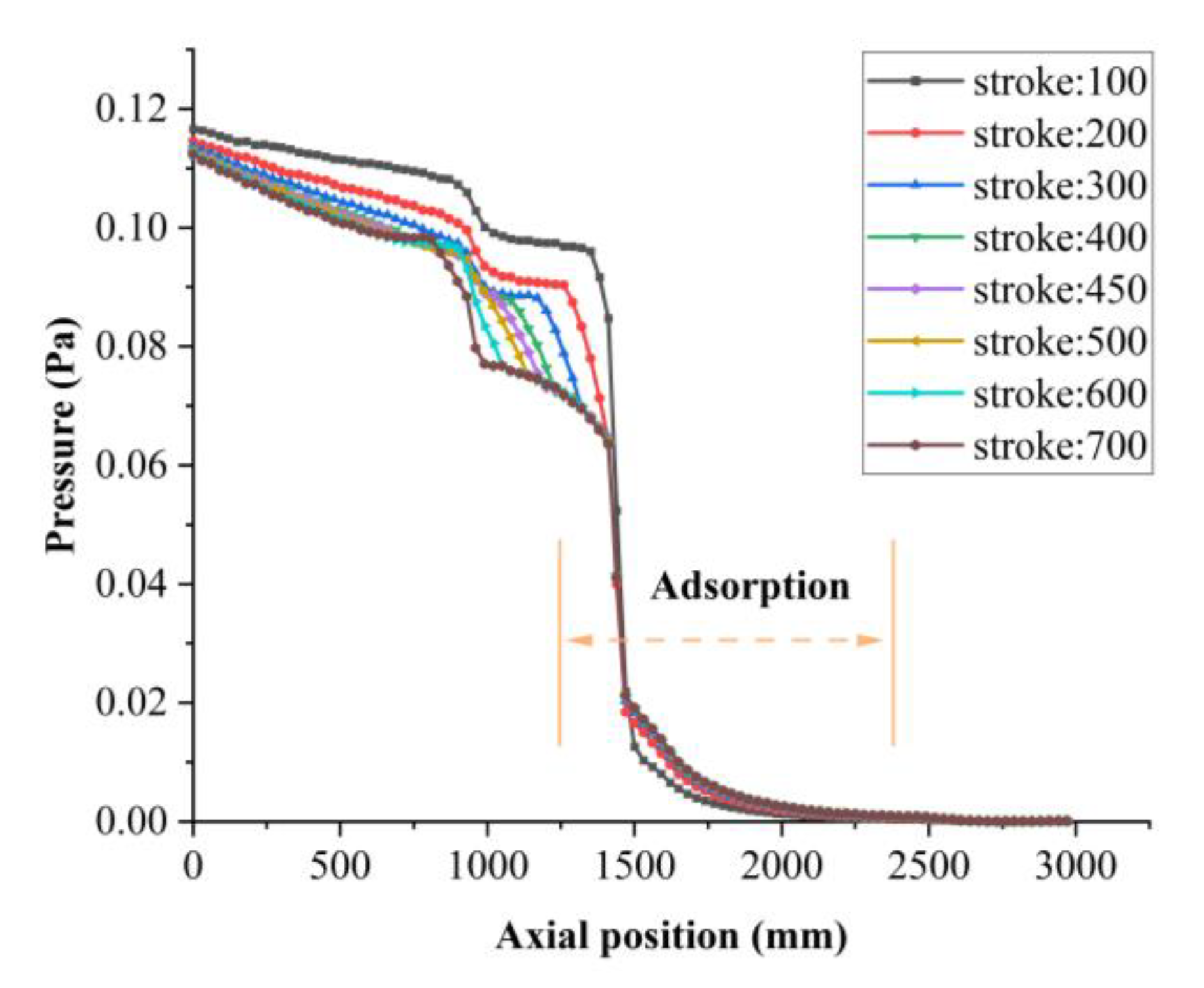
4.3. Estimation of the Transmission Probability
4.4. Seismic Analysis of the Inlet Valve
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Mao, S.; Ye, M.; Li, Y.; Zhang, J.; Zhan, X.; Wang, Z.; Xu, K.; Liu, X.; Li, J. CFETR integration design platform: Overview and recent progress. Fusion Eng. Des. 2019, 146, 1153–1156. [Google Scholar] [CrossRef]
- Wan, Y.; Li, J.; Liu, Y.; Wang, X.; Chan, V.; Chen, C.; Duan, X.; Fu, P.; Gao, X.; Feng, K.; et al. Overview of the present progress and activities on the CFETR. Nucl. Fusion 2017, 57, 102009. [Google Scholar] [CrossRef]
- Zhuang, G.; Li, G.; Li, J.; Wan, Y.; Liu, Y.; Wang, X.; Song, Y.; Chan, V.; Yang, Q.; Wan, B.; et al. Progress of the CFETR design. Nucl. Fusion 2019, 59, 112010. [Google Scholar] [CrossRef]
- Glugla, M.; Antipenkov, A.; Beloglazov, S.; Caldwell-Nichols, C.; Cristescu, I.R.; Cristescu, I.; Day, C.; Doerr, L.; Girard, J.P.; Tada, E. The ITER tritium systems. Fusion Eng. Des. 2007, 82, 472–487. [Google Scholar] [CrossRef]
- Dremel, M.; Pearce, R.; Strobel, H.; Hauer, V.; Day, C.; Wikus, P.; Papastergiou, S. The new build to print design of the ITER Torus Cryopump. Fusion Eng. Des. 2013, 88, 760–763. [Google Scholar] [CrossRef]
- Li, Y.; Zhang, Z.; Qiu, Y.; Zha, F.; Li, Q. Pumping Performance Evaluation of HL-2M In-Vessel Cryopump With Monte Carlo Method. IEEE Trans. Plasma Sci. 2017, 46, 1587–1591. [Google Scholar] [CrossRef]
- Lee, H.; Park, Y.; Chang, Y.; Kim, J.; Lee, D.; Yang, H.; Bozek, A.; Smith, J.; Anderson, P. Design and fabrication of the KSTAR in-vessel cryo-pump. Fusion Eng. Des. 2011, 86, 1993–1996. [Google Scholar] [CrossRef]
- Mukherjee, S.; Panchal, P.; Nayak, P.; Gupta, V.; Das, S.; Mishra, J.; Gangradey, R. Nitrogen and water vapor pumping study on a 400 mm opening LN2 cooled sorption cryopump. Vacuum 2020, 184, 109883. [Google Scholar] [CrossRef]
- Gangradey, R.; Mukherjee, S.S.; Gupta, V.; Panchal, P.; Nayak, P.; Mishra, J.S.; Dewasi, A.; Verma, S.K. Design and development of a liquid nitrogen cooled test cryopump for application in Steady-state Superconducting Toka-mak-1. Vacuum 2022, 200, 110986. [Google Scholar] [CrossRef]
- Kovari, M.; Clarke, R.; Shephard, T. Compound cryopump for fusion reactors. Fusion Eng. Des. 2013, 88, 3293–3298. [Google Scholar] [CrossRef] [Green Version]
- Pedroche, G.; Lopez-Revelles, A.; Kolsek, A.; Dremel, M.; Bansal, G.; Pearce, R.; Sanz, J.; Juarez, R. Nuclear analysis of the ITER torus cryopumps. Nucl. Fusion 2019, 59, 106045. [Google Scholar] [CrossRef]
- Day, C.; Murdoch, D.; Pearce, R. The vacuum systems of ITER. Vacuum 2008, 83, 773–778. [Google Scholar] [CrossRef]
- Hu, J.; Cao, Z.; Zuo, G.; Yuan, J.; Zhuang, H.; Xu, H.; Cao, C.; Chen, Y.; Yuan, X.; Yu, Y.; et al. Progress of engineering design of CFETR vacuum systems. Fusion Eng. Des. 2022, 177. [Google Scholar] [CrossRef]
- Liu, C.; Lu, K.; Sheng, L.; Song, Y.; Su, J.; Su, M.; Gung, C. Manufacture and test of seismic bellows for ITER magnet feeder. Fusion Eng. Des. 2016, 109–111, 515–520. [Google Scholar] [CrossRef]
- Hauer, V.; Boissin, J.-C.; Day, C.; Haas, H.; Mack, A.; Murdoch, D.; Lässer, R.; Wykes, M. Design of the ITER torus prototype cryopump. Fusion Eng. Des. 2007, 82, 2113–2119. [Google Scholar] [CrossRef]
- Day, C.; Antipenkov, A.; Dremel, M.; Haas, H.; Hauer, V.; Mack, A.; Murdoch, D.; Wykes, M. R&D and design for the cryogenic and mechanical vacuum pumping systems of ITER. Vacuum 2007, 81, 738–747. [Google Scholar]
- Yoshida, H.; Shiro, M.; Arai, K.; Akimichi, H.; Hirata, M. Calculation and uncertainty evaluation of conductance of a precise orifice for orifice-flow method. Vacuum 2009, 84, 277–279. [Google Scholar] [CrossRef]
- Luo, X.; Scannapiego, M.; Day, C.; Sakurai, S. Assessment of the JT-60SA divertor cryopump performance. Fusion Eng. Des. 2018, 136, 467–471. [Google Scholar] [CrossRef]
- Lang, J.; Hu, C.; Xie, Y.; Tong, Y. Optimization Analysis of the Structural Design of NNBI Cryosorption Pumps. Energies 2021, 14, 3628. [Google Scholar] [CrossRef]
- Scannapiego, M.; Day, C.; Hauer, V. Consequences of plasma disruption mitigation by massive gas injection on the ITER torus cryopumping system. Fusion Eng. Des. 2014, 89, 2446–2450. [Google Scholar] [CrossRef]
- Mohan, A.; Tompson, R.V.; Loyalka, S.K. Efficient numerical solution of the Clausing problem. J. Vac. Sci. Technol. A Vac. Surf. Film. 2007, 25, 758–762. [Google Scholar] [CrossRef]
- Clausing, P. The flow of highly rarefied gases through tubes of arbitrary length. J. Vac. Sci. Technol. 1971, 8, 636–646. [Google Scholar] [CrossRef]




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| X Direction | Y Direction | Z Direction |
|---|---|---|
| 3.42 m/s2 | 3.00 m/s2 | 2.29 m/s2 |
| L/R | Monte Carlo | Clausing Equation | MC Relative Error (×10−5) |
|---|---|---|---|
| 0.5 | 0.801265 | 0.801271 | −0.6 |
| 1 | 0.671973 | 0.671983 | −1.0 |
| 2 | 0.514225 | 0.514230 | −0.5 |
| 5 | 0.310526 | 0.310525 | 0.1 |
| 10 | 0.190939 | 0.190942 | −0.3 |
| 20 | 0.109314 | 0.109320 | −0.6 |
| 50 | 0.048475 | 0.048476 | −0.1 |
| Type of Valve Disc | Thickness (mm) | Maximum Stress (MPa) | Maximum Deformation (mm) |
|---|---|---|---|
| Rectangular valve disc | 8 | 687.74 | 389.64 |
| Fillet valve disc | 8 | 425.69 | 79.65 |
| Stepped valve disc | 8 | 393.88 | 29.02 |
| Disk-shaped valve disc | 8 | 240.56 | 1.10 |
| Disk-shaped valve disc | 10 | 240.23 | 0.89 |
| Disk-shaped valve disc | 12 | 240.08 | 0.76 |
| Stroke (mm) | Transmission Probability | Maximum Deformation (mm) | Maximum Stress (MPa) |
|---|---|---|---|
| 450 | 0.178 | 0.68 | 15.86 |
| 500 | 0.181 | 0.75 | 16.99 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhou, Y.; Feng, H.; Zhang, S.; Zhuang, M.; Zhao, Z. Design and Analysis of the Inlet Valve for the CFETR Torus Cryopump. Energies 2023, 16, 3107. https://doi.org/10.3390/en16073107
Zhou Y, Feng H, Zhang S, Zhuang M, Zhao Z. Design and Analysis of the Inlet Valve for the CFETR Torus Cryopump. Energies. 2023; 16(7):3107. https://doi.org/10.3390/en16073107
Chicago/Turabian StyleZhou, Yaqi, Hansheng Feng, Shuo Zhang, Ming Zhuang, and Ziyu Zhao. 2023. "Design and Analysis of the Inlet Valve for the CFETR Torus Cryopump" Energies 16, no. 7: 3107. https://doi.org/10.3390/en16073107