
Design and Operation of Internet of Things-Based Monitoring Control System for Induction Machines

 , ,
, , {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Overview of Control System of IM with IoT
2.1. Monitoring, Process Control and Diagnosis
2.2. Energy Generation Management
2.3. IoT Joins Educational Sciences
3. Structure of Control System of IM with IoT
- (a)
- (b)
- the second stage is in transient regimes of operation, where different parameters can be instantly changed, and must be verified the operation of the drive, at the same or at different operating points as above. The study of transients implies the study of system stability to instantaneously changes of inputs and of external perturbations [52], the design of controllers [53,54], etc.
- The connectivity of equipment with Internet, servers, software, databases and measurement instrumentation. Some of the modules can be connected directly: electric motors, power converters, microcontrollers, and sensors. Other modules are connected indirectly by using a gateway for the communication with the backend system, which provides device registration, data collection, data analysis and processing, logical design and visualization;
- The data acquisition, conversion, storage, retrieving, analysis, computations. Other tasks for data processing are real-time visualizing, sending to monitoring system, etc.
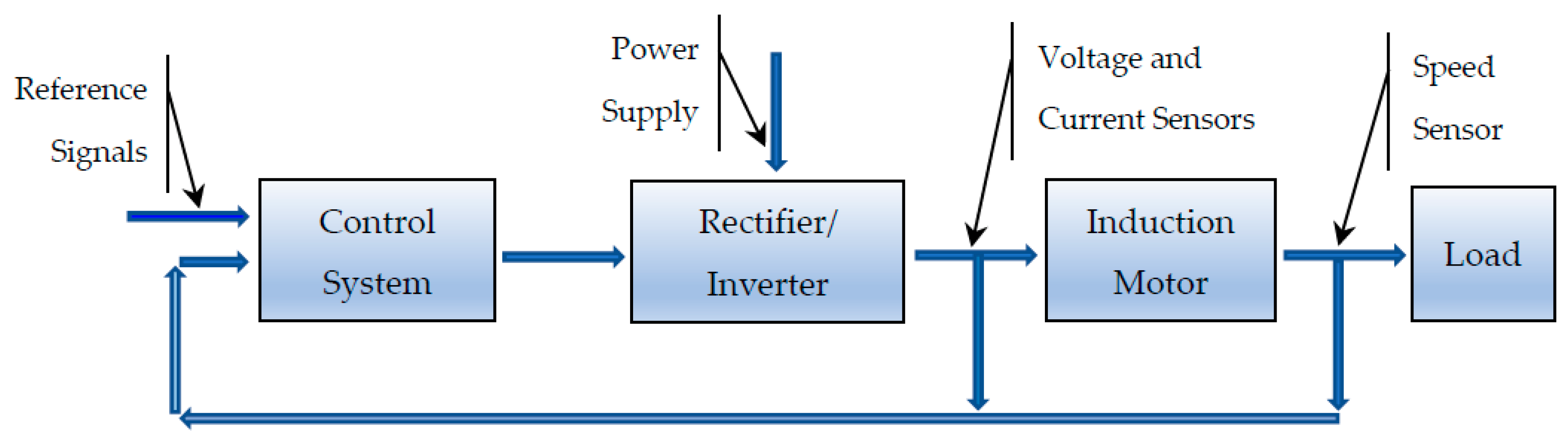
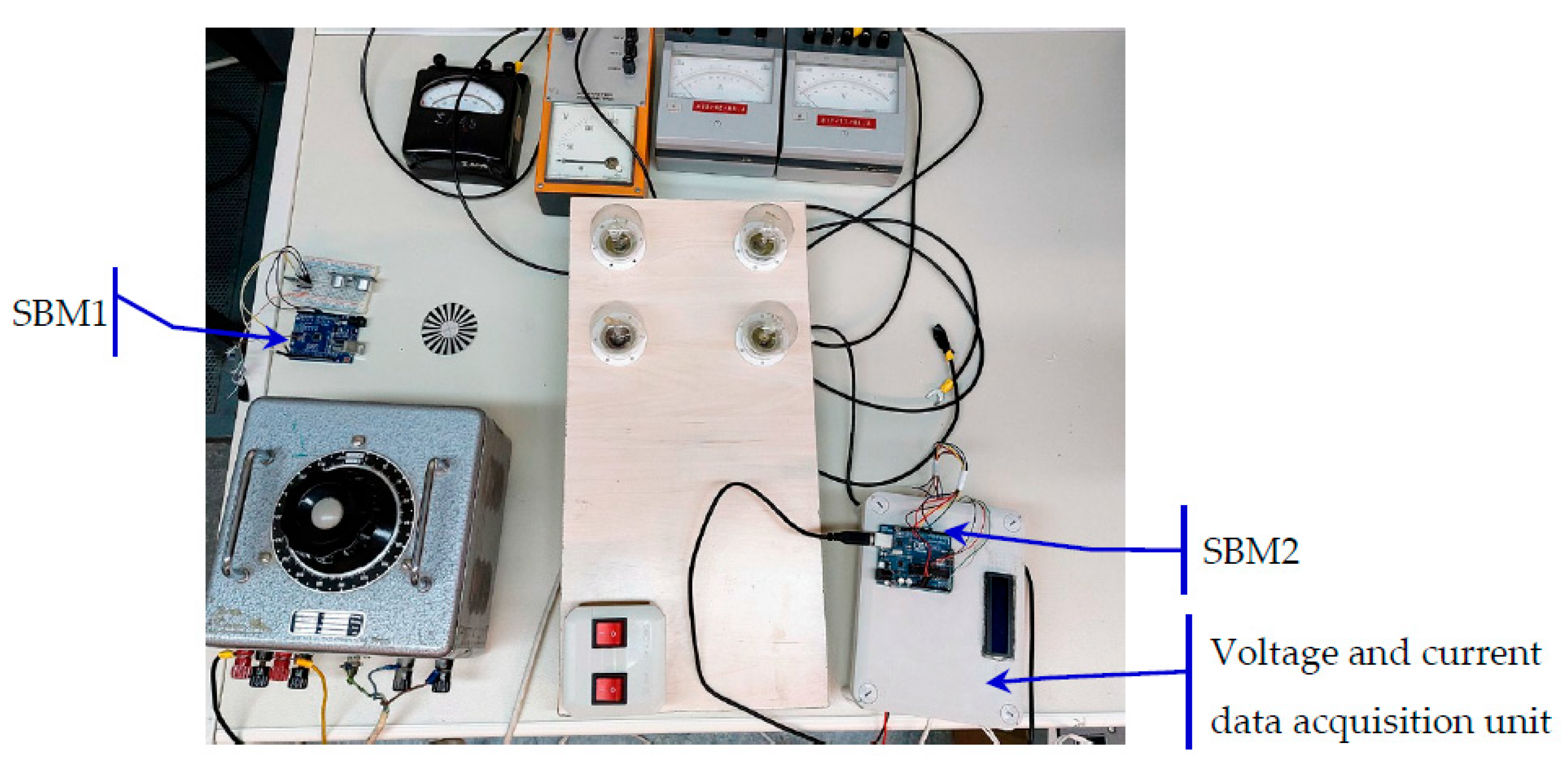
- Control system with IoT, with stator variable-voltage-variable-frequency, for variable load-variable speed operation, with feedback for speed and for load current. The IM is fed by the inverter, drives the dc generator, and the dc current supplies an electric load. The SBC and SBM1-SBM2 are receiving data and sending commands by using the IoT to control the inverter’s output variable frequency;
- Open-loop control system without IoT, with stator variable-voltage-variable-frequency for variable load-variable speed operation, and without feedback. The IM is fed by the inverter in local control mode, drives the dc generator which supplies an electric load. The SBC, SBM1-SBM2 and the networks with the IoT are disabled;
- The typical constant speed operation. The IM receives the 3-phase constant voltage-constant frequency, drives the dc generator and supplies the electric load.
4. Hardware Structure and Modules
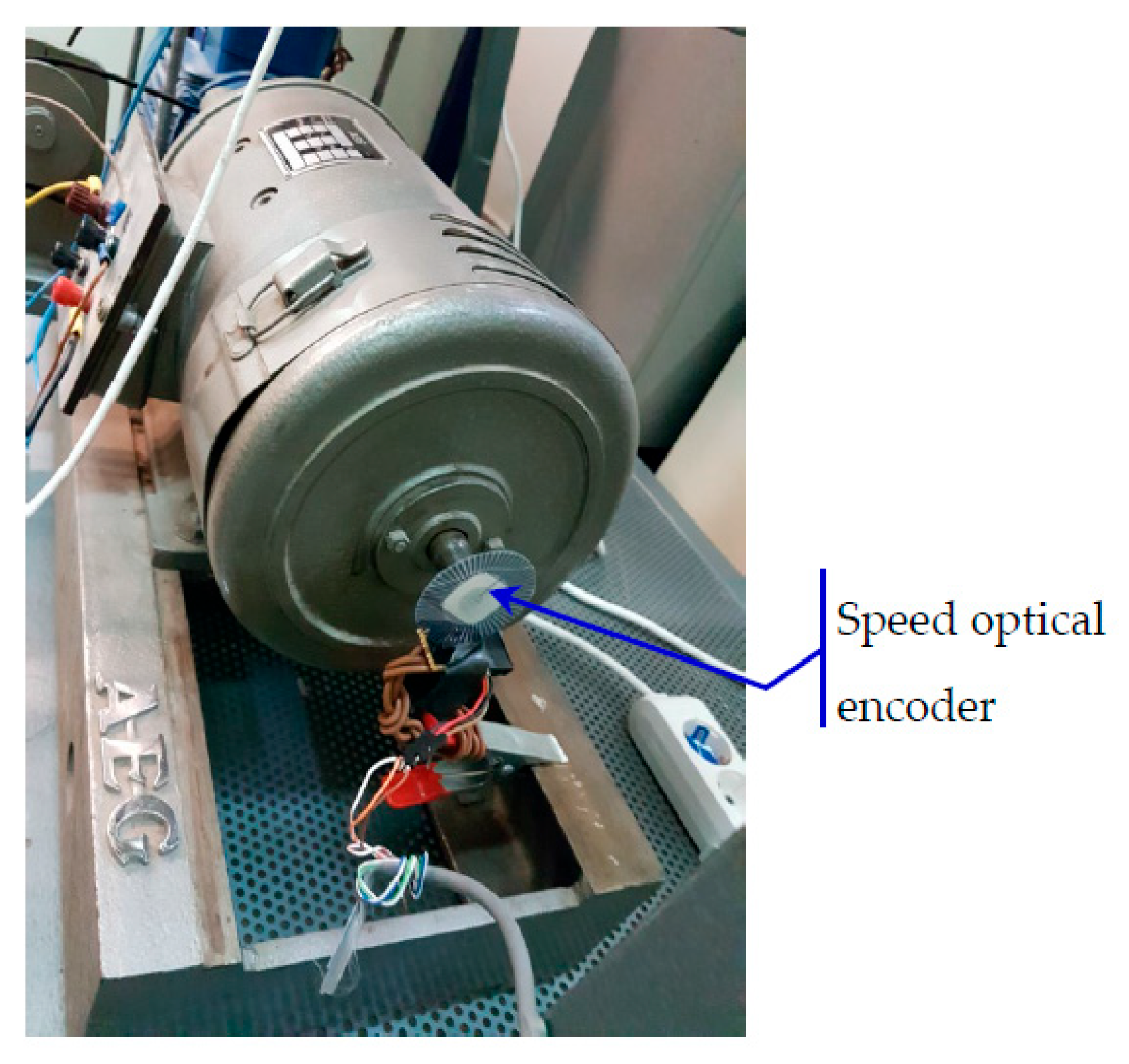
- The electrical machines and drive modules, Figure 3:
- One IM is connected to a dc generator and supplies an electric load;
- One digitally controlled three-phase rectifier-inverter with keyboard and programmable [61];
- One single-phase rectifier, which supplies excitation voltage to dc generator;
- Variable electric loads.
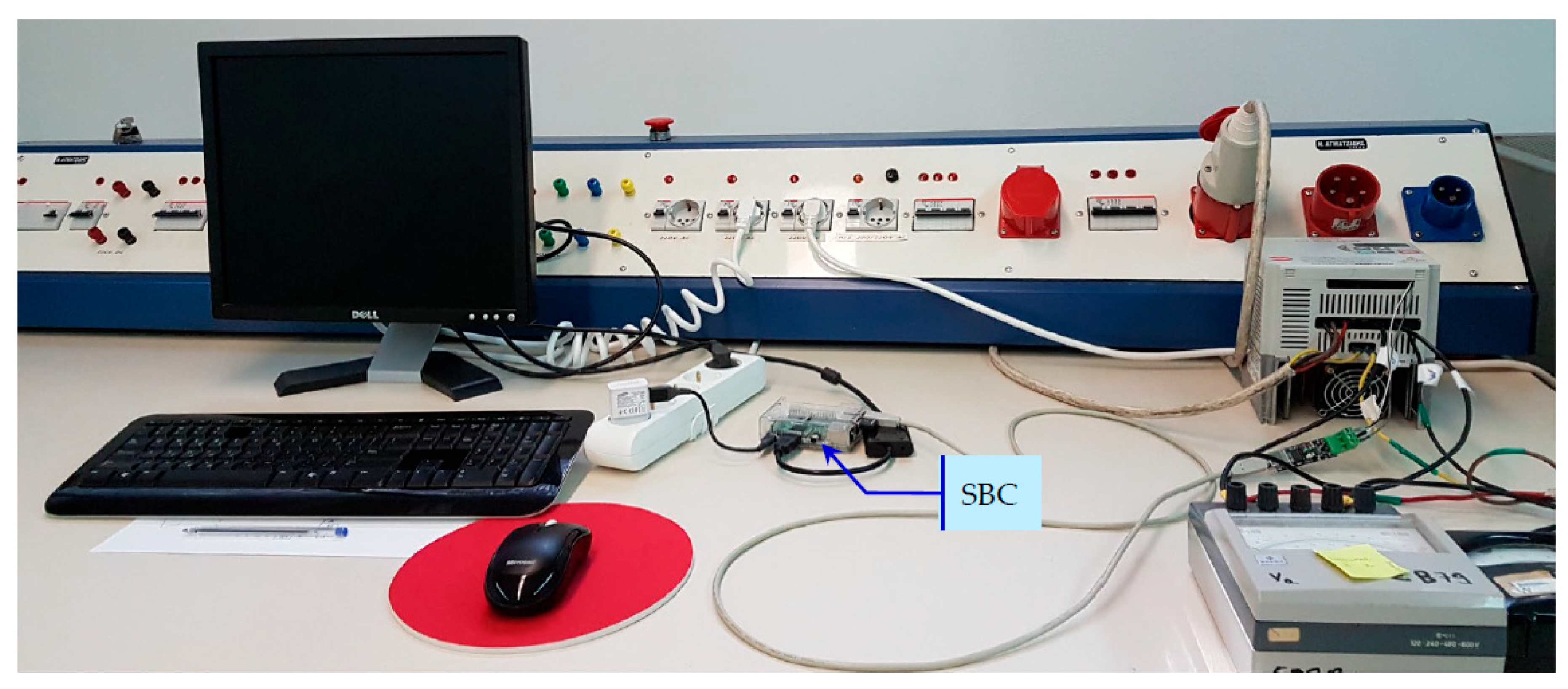
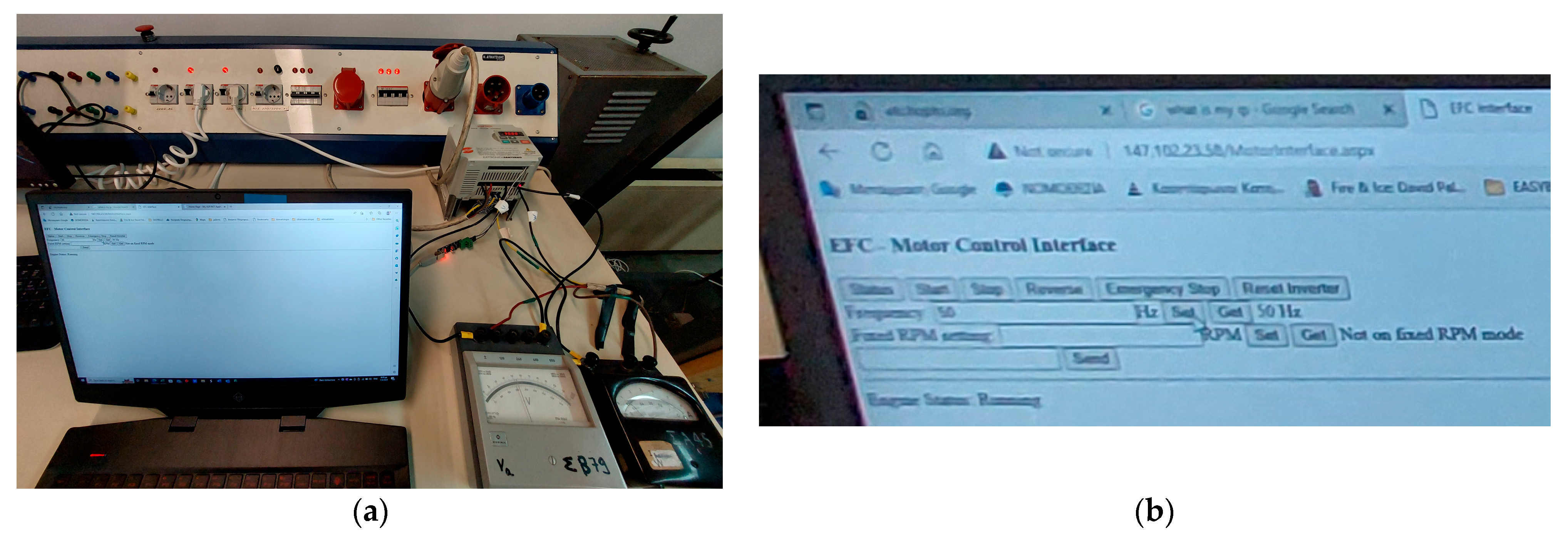
- One IM Control Web Interface, Figure 5a,b;
- Software for the control of IM with IoT;
- Web application (web app) on Azure cloud platform, links with the SBC to distant control, for storage and data processing;
- Networks:
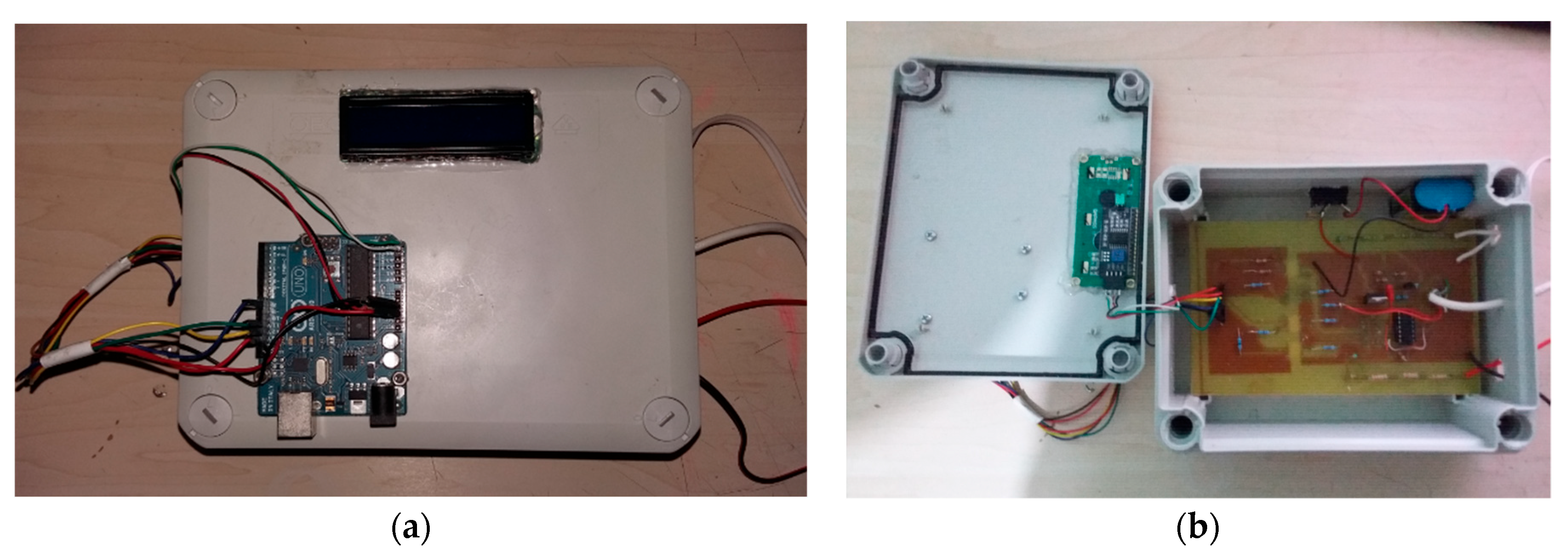
- Data Acquisition Units
- (a)
- voltage, is measured by using a resistive voltage divider to scale down DC Voltage;
- (b)
- current, is measured with the use of a Hall sensor (linear Hall sensor ACS714ELCTR-05B-T) [65].
5. Software Description
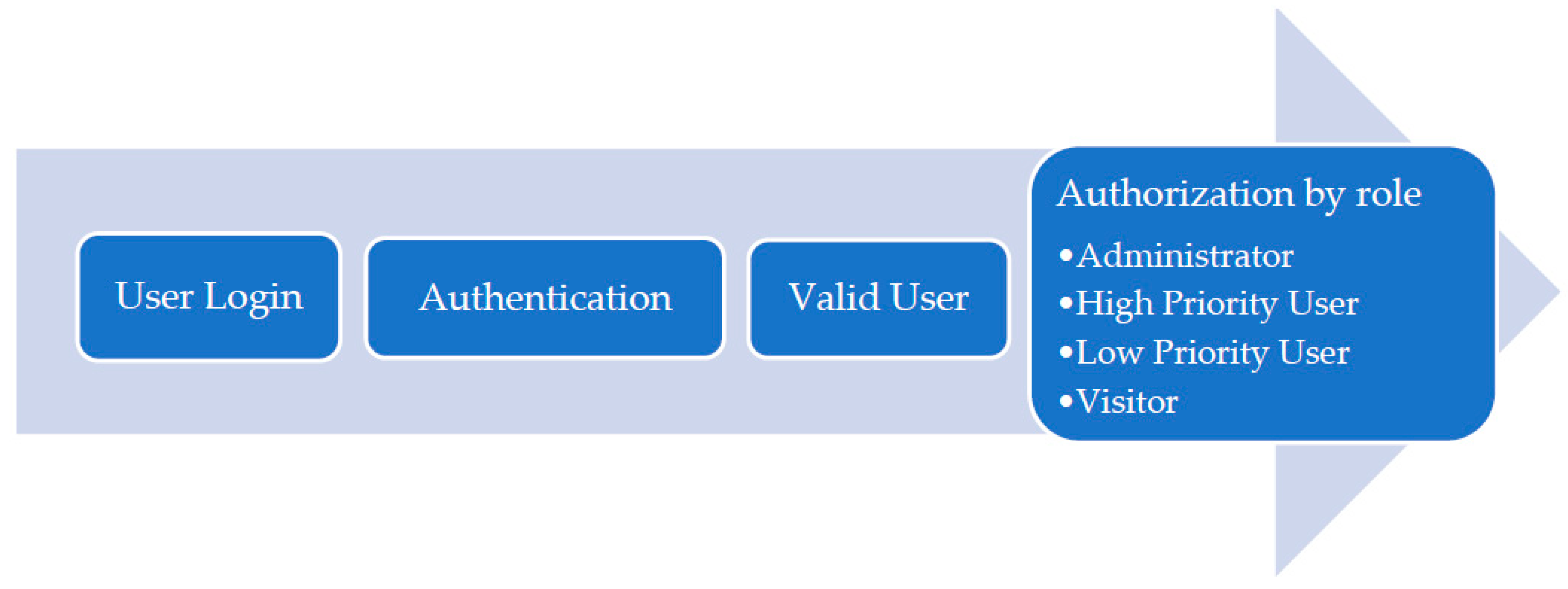
5.1. Monitoring and Protection Software
- Forward or backward command;
- Set Required Frequency setpoint command;
- At no-load, if the Required Frequency setpoint is lower than 10 Hz or 20% (0.2 per unit) of the nominal frequency, the IM is not starting;
- At higher loads than 40% (0.4 per unit) of nominal current and a Required Frequency setpoint lower than 20 Hz or 40% (0.4 per unit) of the nominal frequency, the IM is not starting;
- In overloading situations, at higher loads than 100% of the nominal power and if the Required Frequency setpoint exceeds 100% of the rated frequency, the IM enters the cut-off Emergency Stop process and the IM is cut-off. The operator must select the Emergency Stop command, remove the load and decrease the frequency. Following this, the IM can be restarted.
5.2. Operation Software
6. Results and Discussion
- the hardware modifications which consist mainly on replacing the PLC modular wired components (CPU, motherboard, analog inputs-outputs, relays, multiplexers, power supply), by software with high computing capabilities of server, data storage and processing using mathematical models and cloud applications;
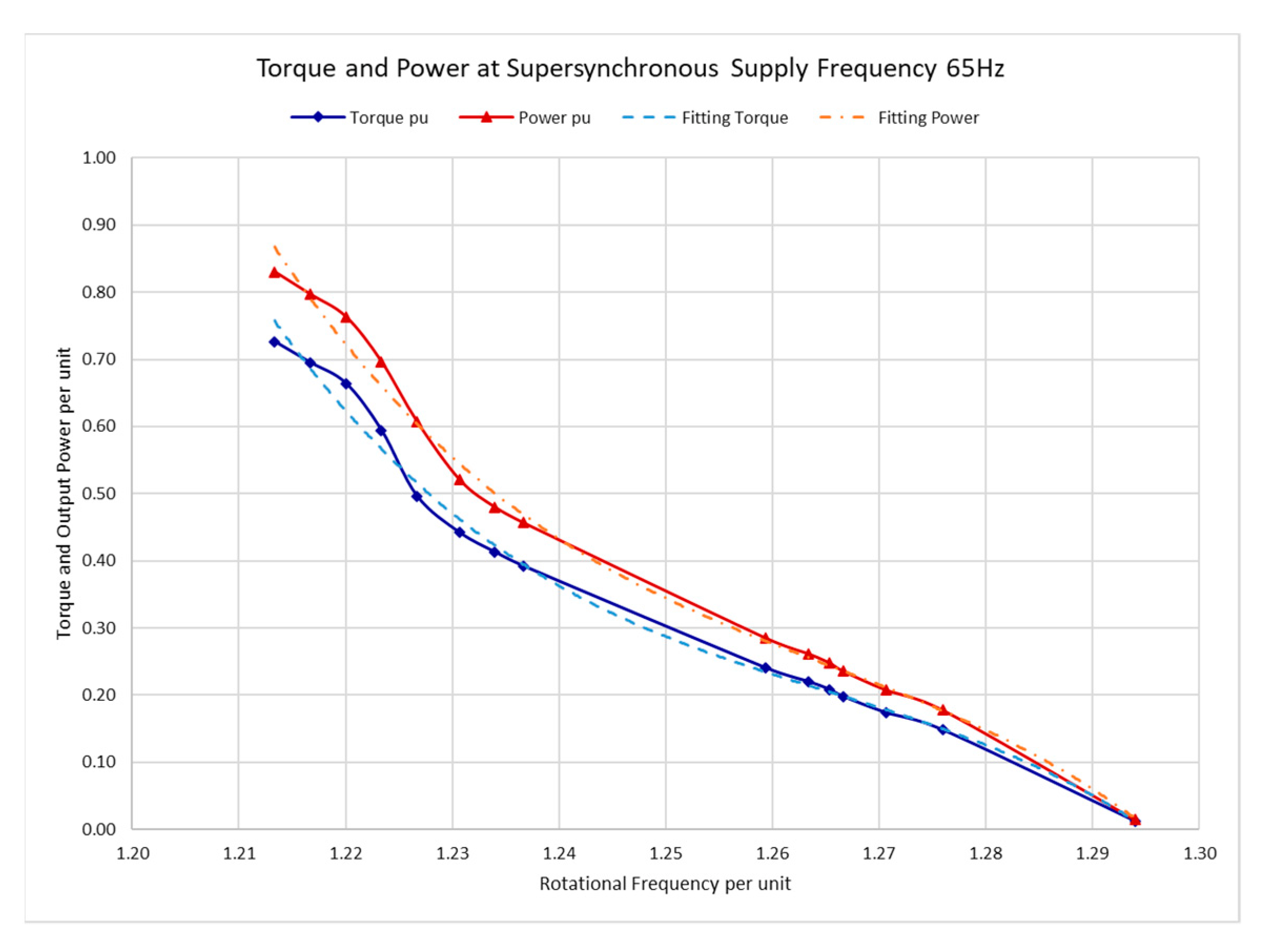
- at supersynchronous speeds higher than 1500 r/min the amount of power input and output are increased as compared to the rated values of the drive, thus it is obtained a better utilization of the design and construction of the same IM;
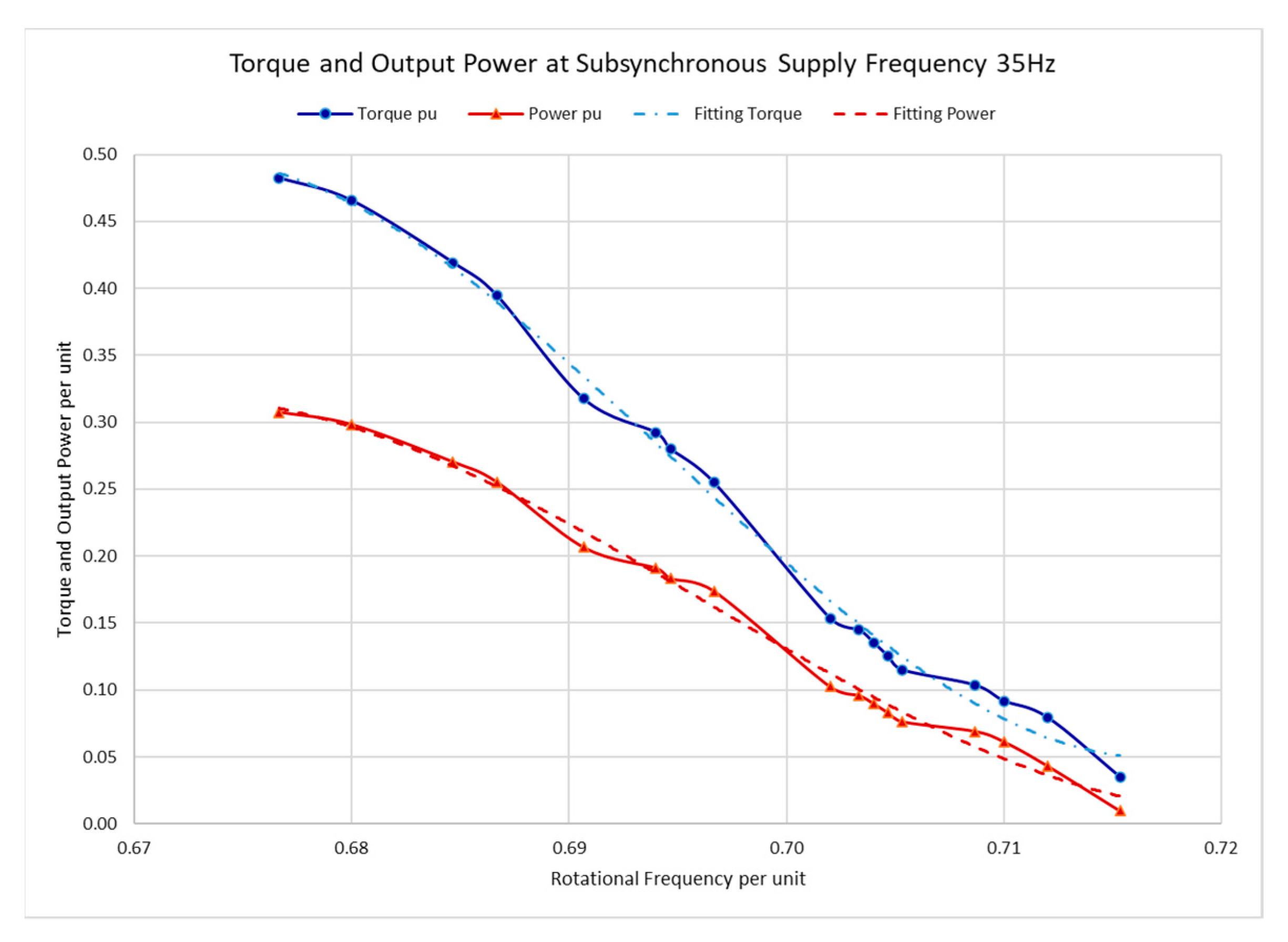
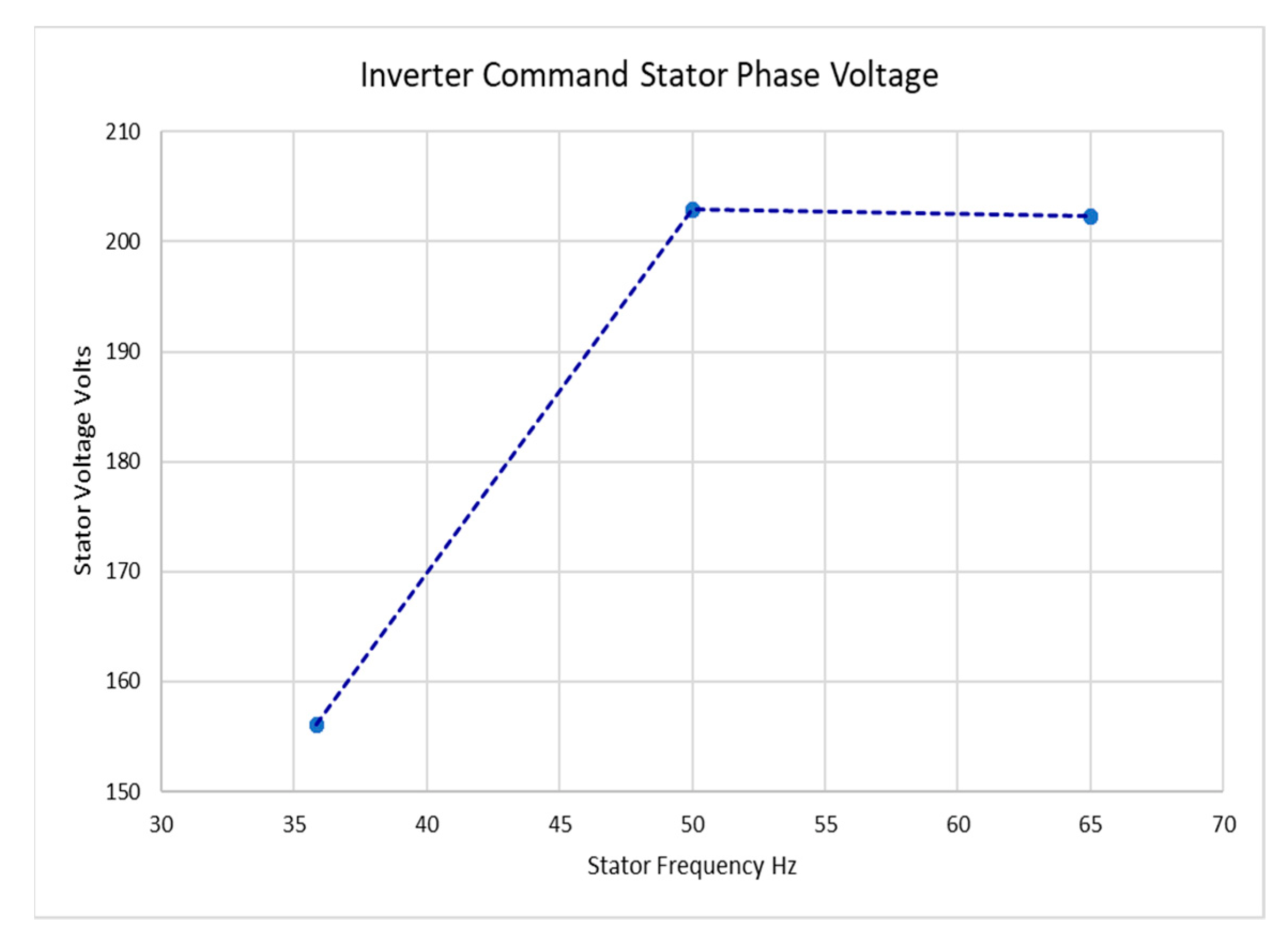
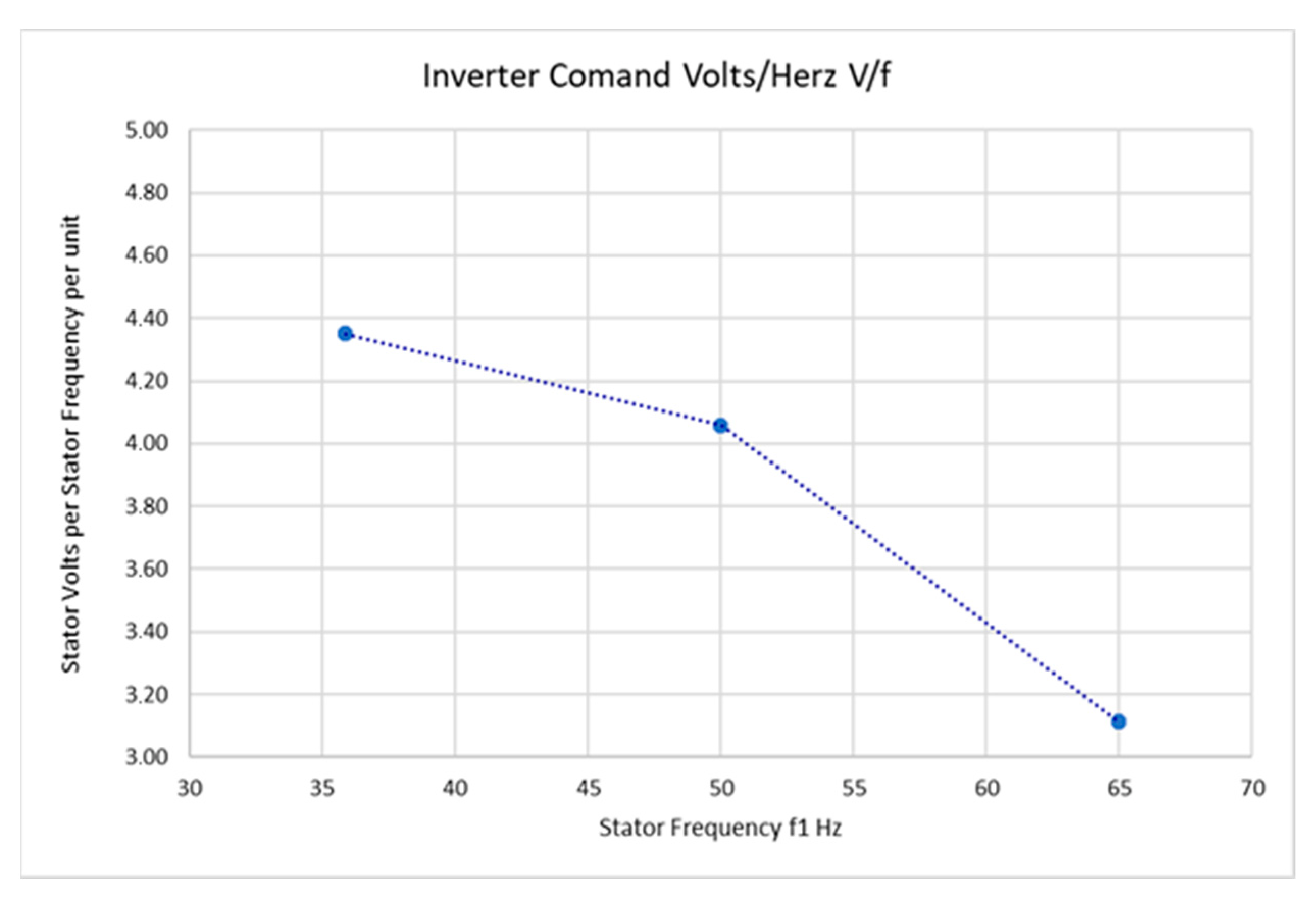
- at supersynchronous speeds, which corresponds to higher than the rated supply frequencies, the magnetizing field produces lower magnetic loses. In such situations the relation between voltage and frequency is kept constant as in Figure 15, from 50 Hz to 65 Hz. The ratio voltage per frequency at 65 Hz from Equation (1) is lower than in the situations at 50 Hz, and 35 Hz, Figure 16.
7. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Sengamalai, U.; Anbazhagan, G.; Thamizh Thentral, T.M.; Vishnuram, P.; Khurshaid, T.; Kamel, S. Three Phase Induction Motor Drive: A Systematic Review on Dynamic Modeling, Parameter Estimation, and Control Schemes. Energies 2022, 15, 8260. [Google Scholar] [CrossRef]
- Kowsalya, M.; Pradeep, R.; Elakya, A.; Gunapriya, D. PLC Based Critical Composition Control for Industries. In Proceedings of the 8th International Conference on Advanced Computing and Communication Systems (ICACCS), Coimbatore, India, 25–26 March 2022; pp. 1636–1639. [Google Scholar] [CrossRef]
- Ioannides, M.G. Design and implementation of PLC-based monitoring control system for induction motor. IEEE Trans. Energy Convers. 2004, 19, 469–476. [Google Scholar] [CrossRef]
- Al-Fuqaha, A.; Guizani, M.; Mohammadi, M.; Aledhari, M.; Ayyash, A. Internet of Things: A Survey on Enabling Technologies, Protocols and Applications. IEEE Commun. Surv. Tutor. 2015, 17, 2347–2376. [Google Scholar] [CrossRef]
- Papazis, S.A.; Ioannides, M.G. Emerging smart technologies for sustainable energy and Internet of Things. In Technical Civilization. 21st Century Society Technology (Cywilizacja Techniczna); Gęsikowska, J., Mreła, A., Eds.; KPSW Pub.: Bydgoszcz, Poland, 2019; Volume 11, pp. 75–84. ISBN 978-83-65744-06-7. [Google Scholar]
- Milić, S.D.; Babić, B.M. Toward the Future—Upgrading Existing Remote Monitoring Concepts to IIoT Concepts. IEEE Internet Things 2020, 7, 11693–11700. [Google Scholar] [CrossRef]
- Ioannides, M.G.; Papazis, S.A.; Ioannidou, F.G. Implementation of scalar control scheme for variable frequency induction motor actuator system. Sens. Actuators Phys. 2003, 106, 306–309. [Google Scholar] [CrossRef]
- Stamatakis, M.E. Deployment of Control Techniques Using Proportional, Derivative and Integral (PID) Controllers with DC Motors. Diploma Thesis, National Technical University of Athens, Athens, Greece, 2015. [Google Scholar]
- Arduino. Available online: https://www.arduino.cc (accessed on 14 January 2023).
- Raspberry Pi. Available online: https://www.raspberrypi.com/for-industry/ (accessed on 14 January 2023).
- Stamelos, A.P. Development of Software Application for Multiple Database Connections. Diploma Thesis, National Technical University of Athens, School of Electrical and Computer Engineering, Athens, Greece, 2015. [Google Scholar] [CrossRef]
- Zavou, M. Remote Control of Induction Motor via Internet Using Microprocessors Arduino & RPI. Diploma Thesis, National Technical University of Athens, Athens, Greece, 2017. [Google Scholar]
- Stamelos, A.P.; Papoutsidakis, A.; Vikentios, V.; Papazis, S.A.; Ioannides, M.G. Experimental Educational System of AC Electric Drives with Internet of Things. In Proceedings of the XXIII International Conference on Electrical Machines ICEM 2018, Alexandroupoli, Greece, 3–6 September 2018; pp. 1497–1502. [Google Scholar] [CrossRef]
- Ioannides, M.G.; Stamelos, A.; Papazis, S.A.; Papoutsidakis, A.; Vikentios, V.; Apostolakis, N. IoT monitoring system for applications with renewable energy generation and electric drives. Renew. Energ. Power Qual. J. 2021, 19, 565–570. [Google Scholar] [CrossRef]
- Tran, M.-Q.; Elsisi, M.; Mahmoud, K.; Liu, M.-K.; Lehtonen, M.; Darwish, M.M.F. Experimental Setup for Online Fault Diagnosis of Induction Machines via Promising IoT and Machine Learning: Towards Industry 4.0 Empowerment. IEEE Access 2021, 9, 115429–115441. [Google Scholar] [CrossRef]
- Santos, J.F.D.; Tshoombe, B.K.; Santos, L.H.B.; Araujo, R.C.F.; Manito, A.R.A.; Fonseca, W.S.; Silva, M.O. Digital Twin-Based Monitoring System of Induction Motors Using IoT Sensors and Thermo-Magnetic Finite Element Analysis. IEEE Access 2023, 11, 1682–1693. [Google Scholar] [CrossRef]
- Zhong, R.Y.; Xu, X.; Klotz, E.; Newman, S.T. Intelligent manufacturing in the context of industry 4.0: A review. Engineering 2017, 3, 616–630. [Google Scholar] [CrossRef]
- Abid, G.; Shaikh, S.A.; Shaikh, M.F.; Hafeez Rajput, S.; Majeed, U.A.; Shaikh, A.M. IOT based smart industrial panel for controlling three-phase induction motor. In Proceedings of the 3rd International Conference on Computing, Mathematics and Engineering Technologies iCoMET, Sukkur, Pakistan, 29–30 January 2020; pp. 1–8. [Google Scholar] [CrossRef]
- Prakash, C.; Thakur, S. Smart Shut-Down and Recovery Mechanism for Industrial Machines Using Internet of Things. In Proceedings of the 8th International Conference on Cloud Computing, Data Science & Engineering (Confluence), Noida, India, 11–12 January 2018; pp. 824–828. [Google Scholar] [CrossRef]
- Junfithrana, A.P.; Solikin, I.; Hadi, J.K.; Dedy Novianto, M. Improving Electric Motor Performance by Handling Interference using IoT. In Proceedings of the 5th International Conference on Computing Engineering and Design (ICCED), Singapore, 11–13 April 2019; pp. 1–5. [Google Scholar] [CrossRef]
- Dehbashi, N.; Seyyed Hosseini, M.; Yazdian-Varjani, A. IoT Based Condition Monitoring and Control of Induction Motor Using Raspberry Pi. In Proceedings of the 13th Power Electronics, Drive Systems, and Technologies Conference (PEDSTC), Tehran, Iran, 1–3 February 2022; pp. 134–138. [Google Scholar] [CrossRef]
- Kurniawan, A.O.; Hakiki, A.R.; Banjarnahor, K.N.; Hady, M.A.; Santoso, A.; Fatoni, A. Internet Based Remote Laboratory Architecture for 3-Phase Induction Motor Control System Experiment. In Proceedings of the International Seminar on Intelligent Technology and Its Applications (ISITIA), Surabaya, Indonesia, 21–22 July 2021; pp. 381–385. [Google Scholar] [CrossRef]
- Ioannides, M.G.; Tuduce, R.; Cristea, P.-D.; Papazis, S.A. Wind power generating systems based on double output induction machine: Considerations about control techniques. In Proceedings of the 20th International Conference on Systems, Signals and Image Processing (IWSSIP 2013), Bucharest, Romania, 7–9 July 2013; pp. 103–107. [Google Scholar] [CrossRef]
- Puklus, Z.; Hodossy, L.; Papazis, S.A. Write-up of Multidisciplinarity in Energetics. In Proceedings of the 3rd International Conference on Interdisciplinarity in Education ICIE’07, An International Forum for Multi-Culturality, Multi-Ethnicity and Multi-Disciplinarity in European Higher Education and Research Multi-Forum’07, Athens, Greece, 15–17 March 2007; pp. 355–362, ISBN 978-960-89028-4-8. [Google Scholar]
- Igbinovia, F.O.; Krupka, J. The Prospect of the Internet of Renewable Energy (IoRE) in Electricity Networks. In Proceedings of the IEEE International Symposium on Technology and Society (ISTAS), Medford, MA, USA, 15–16 November 2019; pp. 1–6. [Google Scholar] [CrossRef]
- Stamatakis, M.E.; Ioannides, M.G. State Transitions Logical Design for Hybrid Energy Generation with Renewable Energy Sources in LNG Ship. Energies 2021, 14, 7803. [Google Scholar] [CrossRef]
- Papazis, S.A.; Ioannides, M.G.; Fotilas, P.N. An information system for the multiple criteria assessment of renewable energy power plants. Wind. Eng. 2000, 24, 81–99. [Google Scholar] [CrossRef]
- Papazis, S.A.; Bakos, G.C. Generalized model of economic dispatch optimization as an educational tool for management of energy systems. Adv. Electr. Comput. Eng. 2021, 21, 75–86. [Google Scholar] [CrossRef]
- Papazis, S.A. Integrated Economic Optimization of Hybrid Thermosolar Concentrating System Based on Exact Mathematical Method. Energies 2022, 15, 7019. [Google Scholar] [CrossRef]
- Elsisi, M.; Tran, M.-Q.; Mahmoud, K.; Lehtonen, M.; Darwish, M.M.F. Robust design of ANFIS-based blade pitch controller for wind energy conversion systems against wind speed fluctuations. IEEE Access 2021, 9, 37894–37904. [Google Scholar] [CrossRef]
- Motlagh, N.H.; Mohammadrezaei, M.; Hunt, J.; Zakeri, B. Internet of Things (IoT) and the Energy Sector. Energies 2020, 13, 494. [Google Scholar] [CrossRef] [Green Version]
- Hussain, S.M.S.; Nadeem, F.; Aftab, M.A.; Ali, I.; Ustun, T.S. The Emerging Energy Internet: Architecture, Benefits, Challenges, and Future Prospects. Electronics 2019, 8, 1037. [Google Scholar] [CrossRef] [Green Version]
- Moness, M.; Moustafa, A.M. A Survey of Cyber-Physical Advances and Challenges of Wind Energy Conversion Systems: Prospects for Internet of Energy. IEEE Internet Things J. 2016, 3, 134–145. [Google Scholar] [CrossRef]
- Williams, K.; Qouneh, A. Internet of Things: Solar array tracker. In Proceedings of the IEEE 60th International Midwest Symposium Circuits and Systems MWSCAS, Boston, MA, USA, 6–9 August 2017. [Google Scholar] [CrossRef]
- Victor, J.L.F.; Jucá, S.C.S.; Pereira, R.I.S.; Carvalho, P.C.M.; Fernández-Ramírez, L.M. IoT Monitoring systems applied to photovoltaic generation: The relevance for increasing decentralized plants. Renew. Energy Power Qual. 2019, 17, 536–545. [Google Scholar] [CrossRef]
- Pali, B.S.; Vadhera, S. Renewable energy systems for generating electric power: A review. In Proceedings of the IEEE 1st International Conference on Power Electronics, Intelligent Control and Energy Systems (ICPEICES), Delhi, India, 4–6 July 2016; pp. 1–6. [Google Scholar] [CrossRef]
- Papazis, S.A.; Ioannides, M.G.; Cernat, M. Investigation of wind turbines in power generation system based on double output induction generator. In Proceedings of the 4th International Conference on Interdisciplinarity in Education ICIE’09: New Emerging Disciplines: Renewable Energy, Environment and Life Sciences, Vilnius, Lithuania, 21–23 May 2009; pp. 284–290, ISBN 978-960-89028-8-6. [Google Scholar]
- Moghimi, M.; Liu, J.; Jamborsalamati, P.; Rafi, F.H.M.; Rahman, S.; Hossain, J.; Stegen, S.; Lu, J. Internet of Things Platform for Energy Management in Multi-Microgrid System to Improve Neutral Current Compensation. Energies 2018, 11, 3102. [Google Scholar] [CrossRef] [Green Version]
- Hossain, M.L.; Abu-Siada, A.; Muyeen, S.M.; Hasan, M.M.; Rahman, M.M. Industrial IoT based condition monitoring for wind energy conversion system. CSEE J. Power Energy Syst. 2021, 7, 654–664. [Google Scholar] [CrossRef]
- Floroian, D.; Moldoveanu, F.; Cernat, M.; Papazis, S.A. Fuzzy controlled, multiagent robotic vision system used for E-learning platforms. In Proceedings of the 5th International Conference on Interdisciplinarity in Education ICIE’10, New Higher Education Programs, ICT in Education, Distance Learning and Research, Tallinn, Estonia, 17–19 June 2010; pp. 158–164, ISBN 978-960-89028-9-3. [Google Scholar]
- Zoller, C.; Cernat, M.; Papazis, S.A.; Dobra, R. Researching strategies for optimizing educational technologies by offering alternative designs. In Proceedings of the 6th International Conference Interdisciplinarity in Education ICIE’11: Education, Research & Innovation in Engineering and Related Disciplines, Karabuk/Safranbolu, Turkey, 14–16 April 2011; pp. 136–142, ISBN 978-960-9556-00-2. [Google Scholar]
- Gerigan, C.; Ogrutan, P.; Ioannidou, F.G. Project Oriented Education Using Simulation in Electronics. In Proceedings of the 4th International Conference on Interdisciplinarity in Education ICIE’09, Vilnius, Lithuania, 21–23 May 2009; pp. 242–246, ISBN 978-960-89028-8-6. Available online: https://www.researchgate.net/publication/267850872 (accessed on 6 November 2022).
- Ioannides, M.G.; Papazis, S.A. Teaching and research in emerging electrical energy engineering education. In Proceedings of the 2021 International Conference on Applied and Theoretical Electricity (ICATE), Craiova, Romania, 27–29 May 2021; pp. 1–5. [Google Scholar] [CrossRef]
- Papadopoulos, P.J.; Papazis, S.A. An assessment of modern web-based education tools and technologies. In Proceedings of the 2nd International Conference Interdisciplinarity in Education ICIE 2006, Athens, Greece, 11–13 May 2006; pp. 170–171, ISBN 960-89028-2-7. [Google Scholar]
- Klaassen, R.; De Vries, P.; Ioannides, M.G.; Papazis, S.A. Tipping your toe in the Emerging Technologies’ Pond from an educational point of view. In Proceedings of the 45th SEFI Conf. Education Excellence for Sustainability, Islands Azores, Portugal, 18–21 September 2017; pp. 1190–1198, ISBN 978-989-98875-7-2. [Google Scholar]
- Ilea, D.N.; Cernat, M.; Stoia, D.; Papazis, S.A. Engineering-based entrepreneurship education. In Proceedings of the 3rd International Conference Interdisciplinarity in Education ICIE’07, An International Forum for Multi-Culturality, Multi-Ethnicity and Multi-Disciplinarity in European Higher Education and Research Multi-Forum’07, Athens, Greece, 15–17 March 2007; pp. 415–425, ISBN 978-960-89028-4-8. [Google Scholar]
- Ilea, D.N.; Cernat, M.; Stoia, D.; Ioannidou, F.G. Entrepreneurial University: Adding Value to Entrepreneurship Education in Electrical Engineering. In Proceedings of the 4th International Conference Interdisciplinarity in Education ICIE’09, Vilnius, Lithuania, 21–23 May 2009; pp. 200–206, ISBN 978-960-89028-8-6. [Google Scholar]
- Ioannides, M.G.; Papazis, S.A. Development of new curricula in vocational education for the needs of enterprises and employability of graduates. In Proceedings of the 15th International Conference Information Technology Based Higher Education and Training ITHET 2016, Istanbul, Turkey, 8–10 September 2016; pp. 1–5. [Google Scholar] [CrossRef]
- Papazis, S.A.; Ioannides, M.G. Emerging Energy Engineering Education on the Way to Employment. In Learning with Technologies and Technologies in Learning; Auer, M.E., Pester, A., May, D., Eds.; Lecture Notes in Networks and Systems; Springer Nature: Cham, Switzerland, 2022; Volume 456, pp. 655–677. [Google Scholar] [CrossRef]
- Ioannidou, M.G.; Tegopoulos, J.A. Performance of a double fed induction motor with controlled rotor voltage magnitude and phase angle. IEEE Trans. Energy Convers. 1987, EC-2, 301–307. [Google Scholar] [CrossRef]
- Ioannides, M.G.; Tegopoulos, J.A. Optimal Efficiency Slip-Power Recovery Drive. IEEE Trans. Energy Convers. 1988, 3, 342–348. [Google Scholar] [CrossRef] [PubMed]
- Ioannides, M.G. Doubly fed induction machine state variables model and dynamic response. IEEE Trans. Energy Convers. 1991, 6, 55–61. [Google Scholar] [CrossRef]
- Ioannides, M.G.; Papadopoulos, P.J. Speed and power factor controller for AC adjustable speed drives. IEEE Trans. Energy Convers. 1991, 6, 469–475. [Google Scholar] [CrossRef]
- Ioannides, M.G. State space formulation and transient stability of the double output asynchronous generator. IEEE Trans. Energy Convers. 1993, 8, 732–738. [Google Scholar] [CrossRef]
- Ioannides, M.G. Determination of frequencies in autonomous double output asynchronous generator. IEEE Trans. Energy Convers. 1992, 7, 747–753. [Google Scholar] [CrossRef]
- Ioannides, M.G. A new approach for the prediction and identification of generated harmonics by induction generators in transient state. IEEE Trans. Energy Convers. 1995, 10, 118–125. [Google Scholar] [CrossRef]
- Hannan, M.A.; Ali, J.A.; Mohamed, A.; Hussain, A. Optimization techniques to enhance the performance of induction motor drives: A review. Renew. Sustain. Energy Rev. 2018, 81, 1611–1626. [Google Scholar] [CrossRef]
- Ioannides, M.G. Slip Compensation Control for Constant Speed Operation of Induction Motor Drives. In Proceedings of the European Power and Energy Systems Conference EUROPES, Crete, Greece, 25–28 June 2002; ACTA Press: Calgary, AB, Canada, 2002; p. 369-217, ISBN 0-88986-336-9. [Google Scholar]
- Jimenez-Gonzalez, J.; Delgado-Quintero, J.M.; Perez-Gomez, C.A.; Lopez-Garcia, I.; Jimenez-Mondragon, V.M.; Campero-Littlewood, E. Scalar Control of Squirrel Cage Induction Motors-Fundamentals and Scope. In Proceedings of the IEEE International Autumn Meeting on Power, Electronics and Computing (ROPEC), Ixtapa, Mexico, 13–15 November 2019; pp. 1–6. [Google Scholar] [CrossRef]
- Lysenko, O.A. Sensorless Scalar Asynchronous Electric Drive for Pressure Stabilization of the Pumping Unit. In Proceedings of the 2021 Dynamics of Systems, Mechanisms and Machines (Dynamics) Conference, Omsk, Russia, 9–11 November 2021; pp. 1–5. [Google Scholar] [CrossRef]
- Santerno Enertronica Group. Available online: https://enertronicasanterno.it/industrial-automation/?lang=en (accessed on 14 January 2023).
- Azure. Available online: https://azure.microsoft.com/en-us (accessed on 23 January 2023).
- Contact Software. Available online: https://www.contact-software.com/en/industries/machinery-plants (accessed on 24 January 2023).
- Vikentios, V. Design and Implementation of a Scheme for Remote Measurement with IoT Technology with Microcomputers Arduino and Raspberry Pi. Master’s Thesis, National Technical University of Athens, Athens, Greece, 2018. [Google Scholar] [CrossRef]
- Allegro Microsystems. Available online: https://www.allegromicro.com/en/search?q=ACS714ELCTR-05B-T (accessed on 25 February 2023).
- ON Semiconductor Corporation. Available online: https://www.onsemi.com/products/interfaces/high-performance-optocouplers/high-speed-logic-gate-optocouplers/6n137 (accessed on 25 February 2023).
- Microchip. Available online: https://www.microchip.com/en-us/product/MCP3008 (accessed on 25 February 2023).
- Valiadis Hellenic Motors. Available online: https://www.valiadis.gr/?view=138 (accessed on 25 February 2023).
- Modbus Tools. Available online: https://www.modbustools.com/modbus.html (accessed on 24 January 2023).
- Hersent, O.; Boswarthick, D.; Elloumi, O. The Internet of Things: Key Applications and Protocols. In Chapter 5 ModBus, 2nd ed.; Wiley: Hoboken, NJ, USA, 2012; ISBN 978-1-119-99435-0. [Google Scholar] [CrossRef]
- Code Project. Available online: https://www.codeproject.com/Articles/20929/Simple-Modbus-Protocol-in-C-NET-2-0 (accessed on 14 January 2023).
- Asp.net Free Cross-Platform. Available online: https://dotnet.microsoft.com/en-us/apps/aspnet (accessed on 25 February 2023).
















Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ioannides, M.G.; Koukoutsis, E.B.; Stamelos, A.P.; Papazis, S.A.; Stamataki, E.E.; Papoutsidakis, A.; Vikentios, V.; Apostolakis, N.; Stamatakis, M.E. Design and Operation of Internet of Things-Based Monitoring Control System for Induction Machines. Energies 2023, 16, 3049. https://doi.org/10.3390/en16073049
Ioannides MG, Koukoutsis EB, Stamelos AP, Papazis SA, Stamataki EE, Papoutsidakis A, Vikentios V, Apostolakis N, Stamatakis ME. Design and Operation of Internet of Things-Based Monitoring Control System for Induction Machines. Energies. 2023; 16(7):3049. https://doi.org/10.3390/en16073049
Chicago/Turabian StyleIoannides, Maria G., Elias B. Koukoutsis, Anastasios P. Stamelos, Stylianos A. Papazis, Erofili E. Stamataki, Athanasios Papoutsidakis, Vasilios Vikentios, Nikolaos Apostolakis, and Michael E. Stamatakis. 2023. "Design and Operation of Internet of Things-Based Monitoring Control System for Induction Machines" Energies 16, no. 7: 3049. https://doi.org/10.3390/en16073049