

An FCS-MPC Strategy for Series APF Based on Deadbeat Direct Compensation

Abstract
:1. Introduction
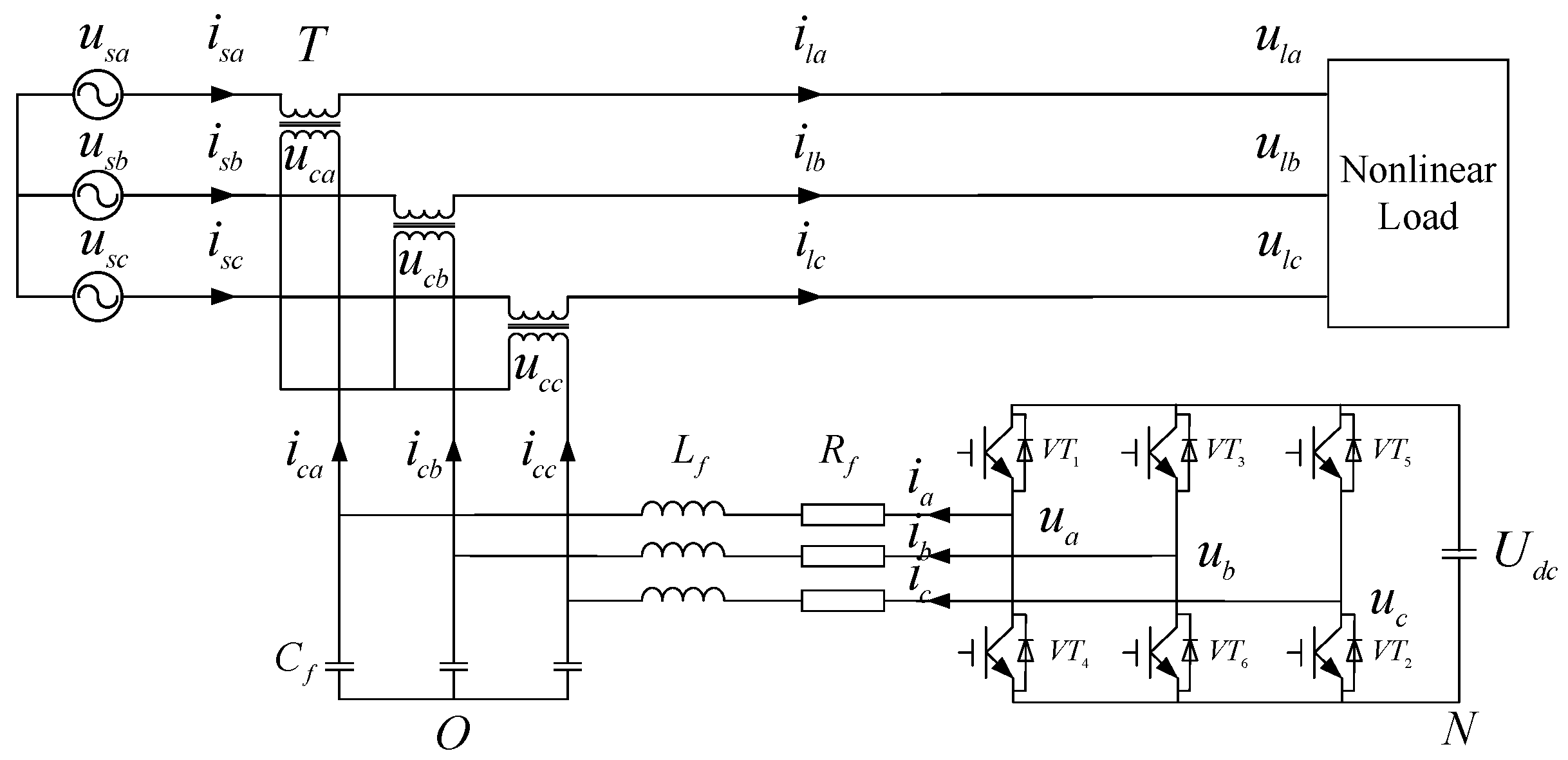
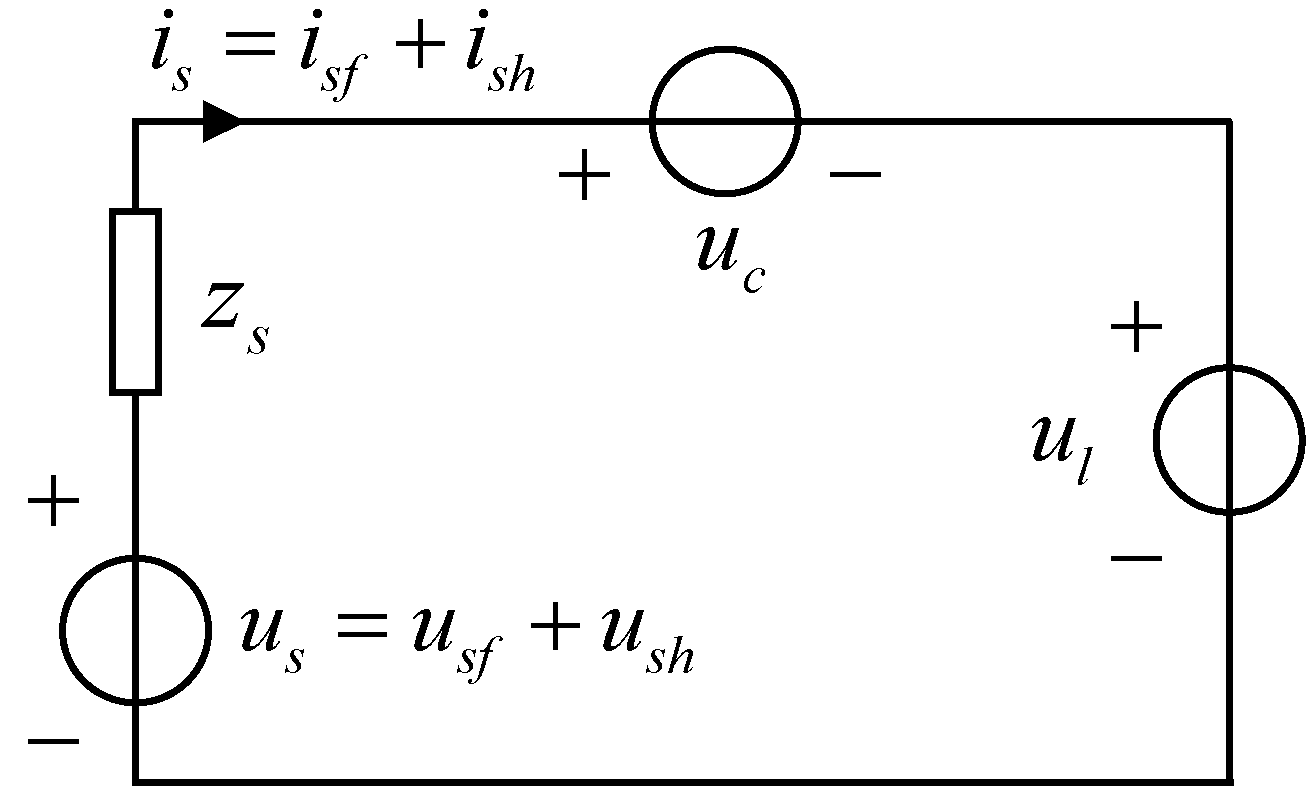
2. The System Structure and Mathematical Model of SAPF
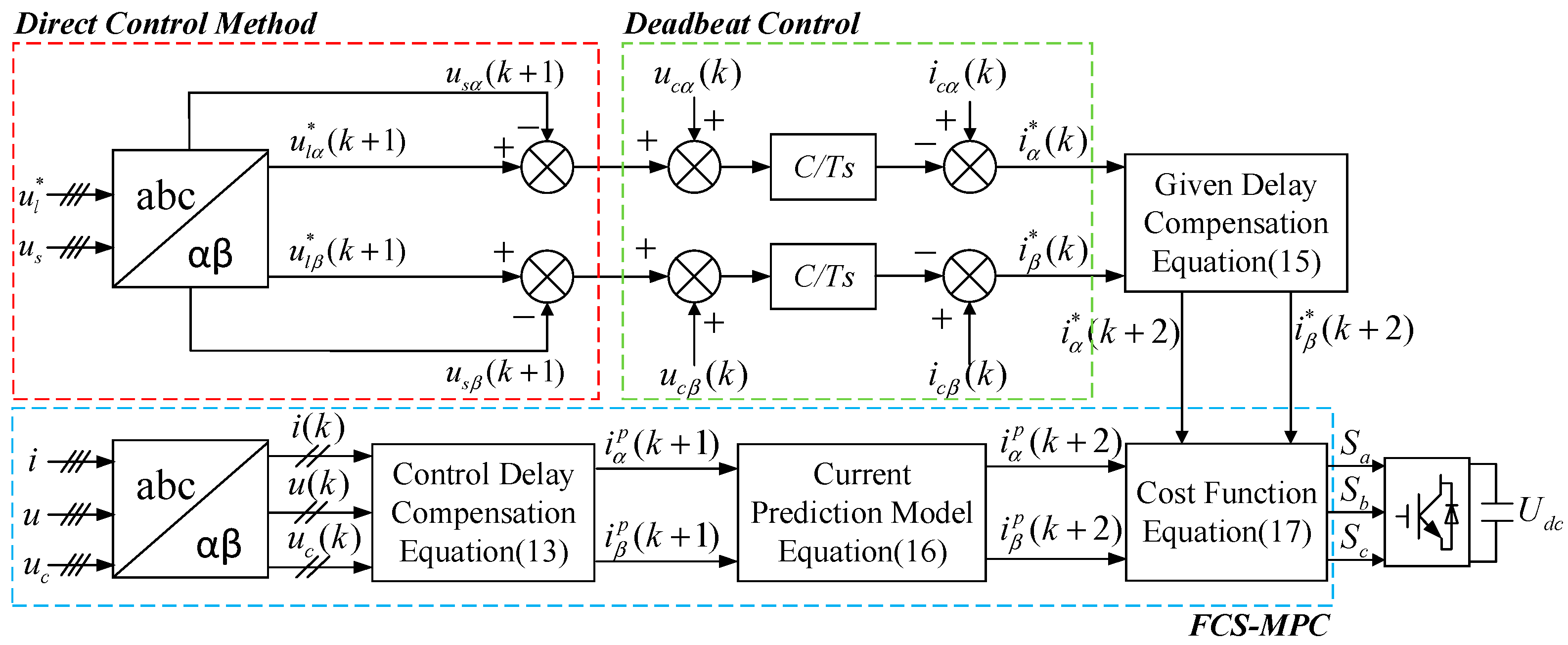
3. The DBDC-FCS-MPC Strategy for SAPF
3.1. The Reference Voltage Generation Mechanism Based on Direct Control
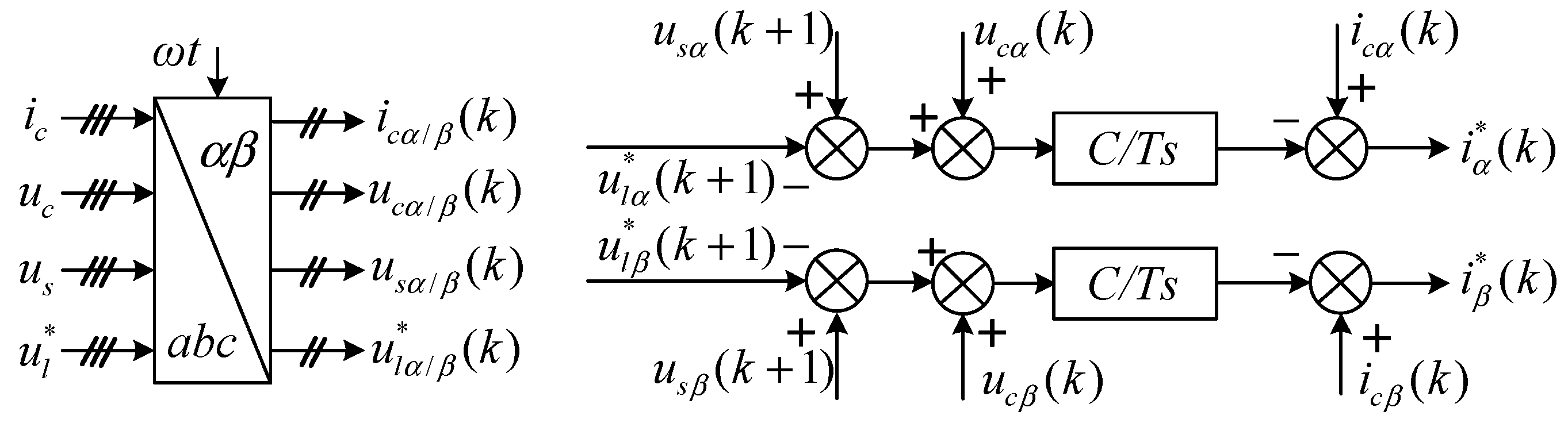
3.2. The Reference Current Generation Mechanism Based on DBC
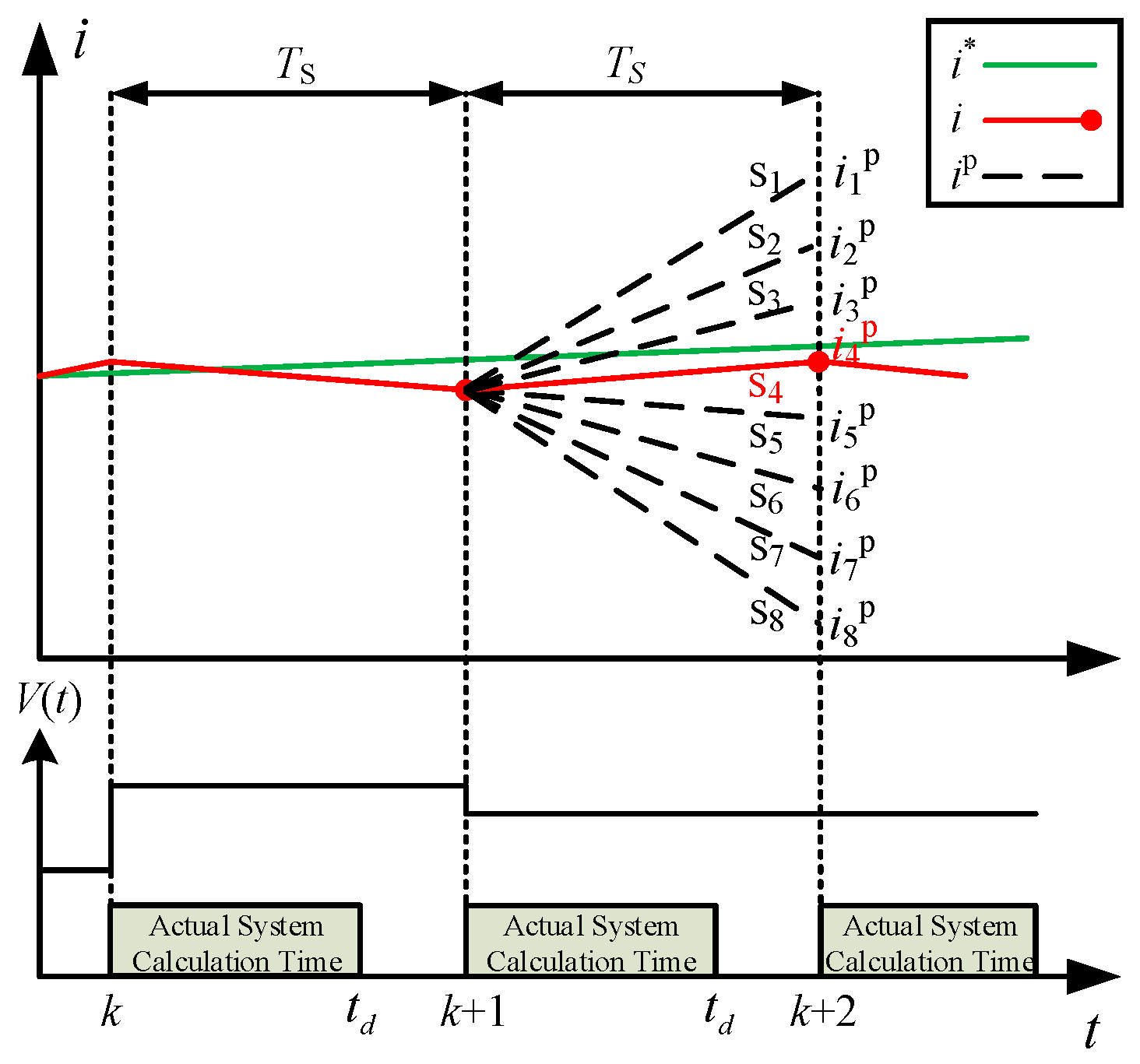
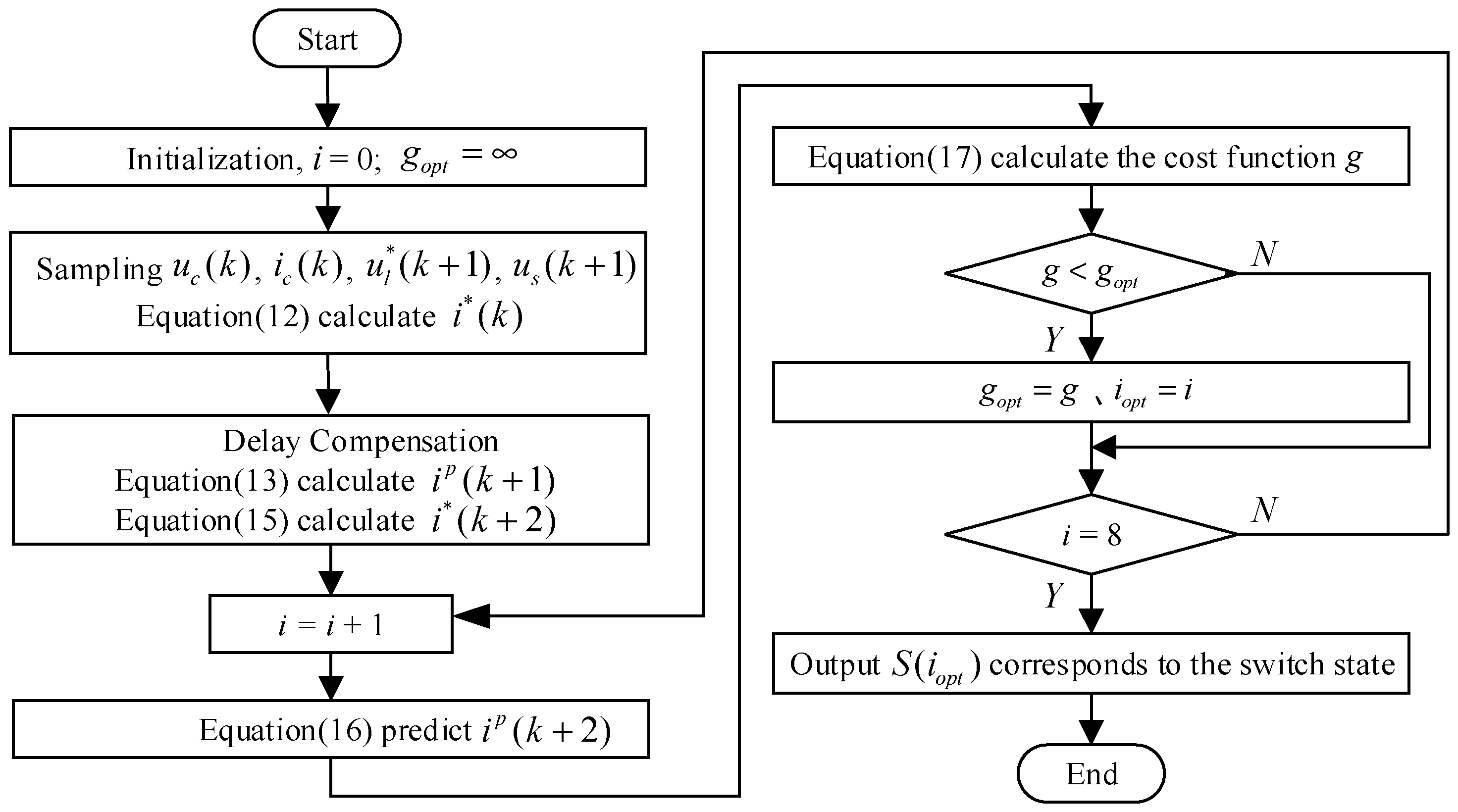
3.3. FCS-MPC of SAPF
4. Simulation Verification and Experimental Analysis
4.1. Simulation Verification
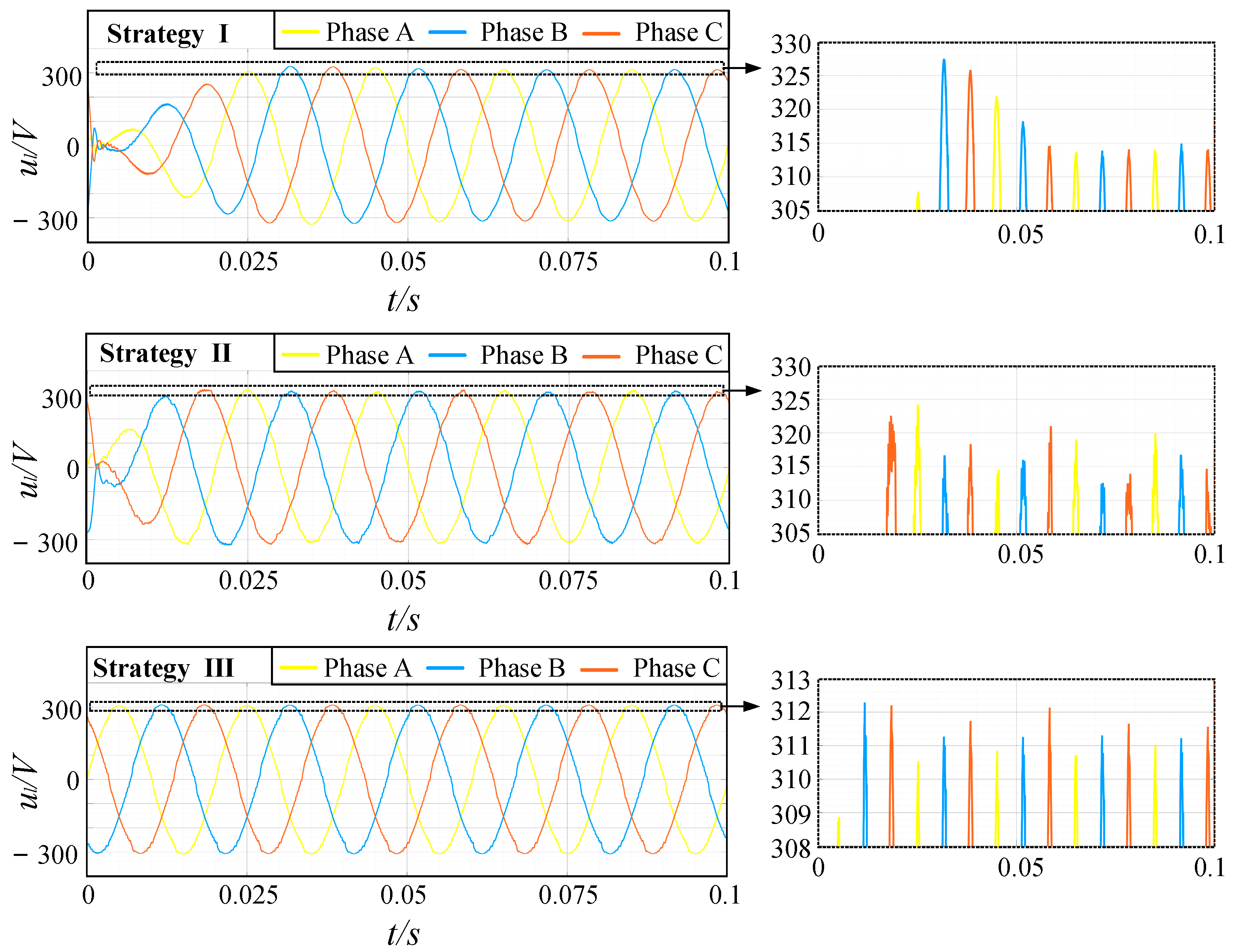
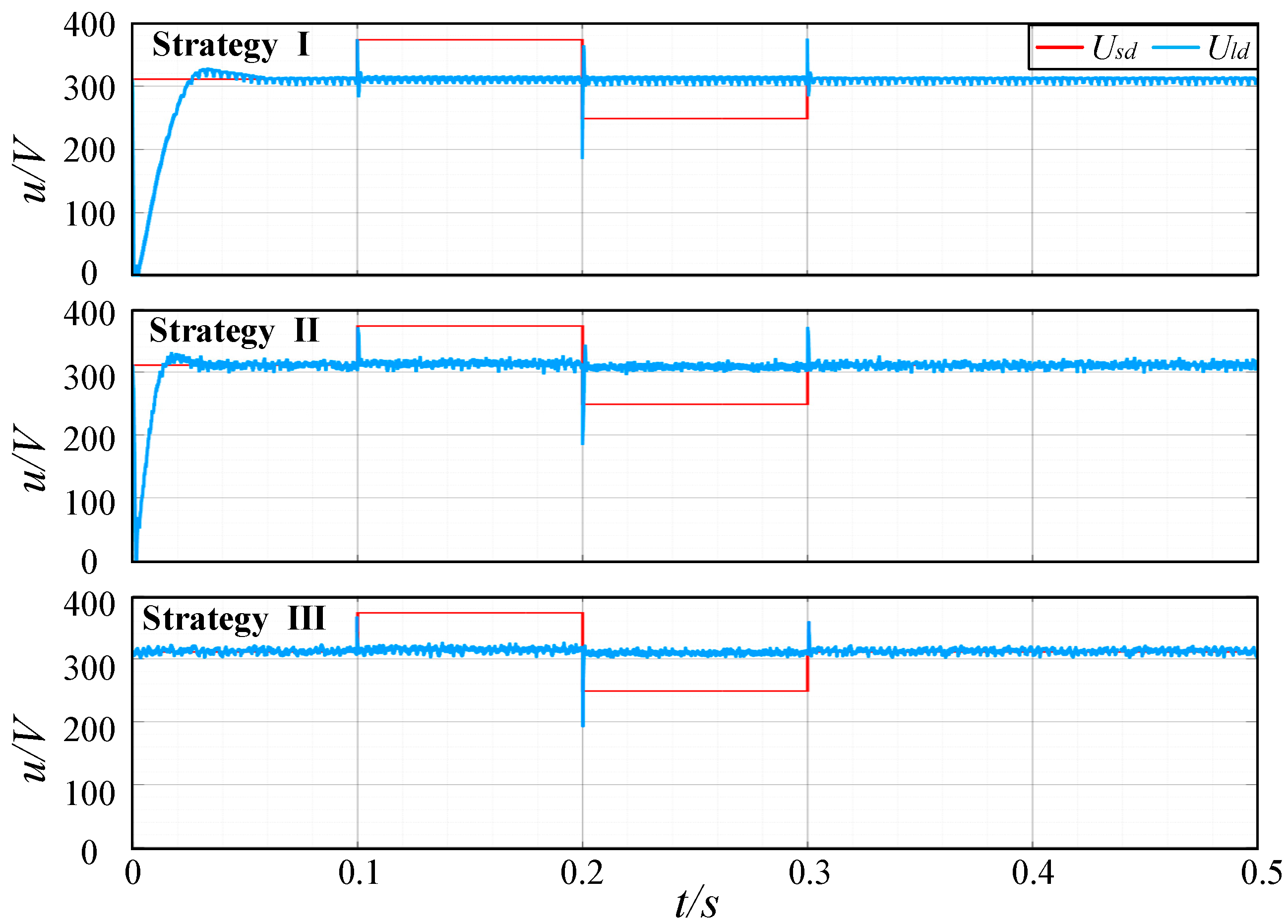
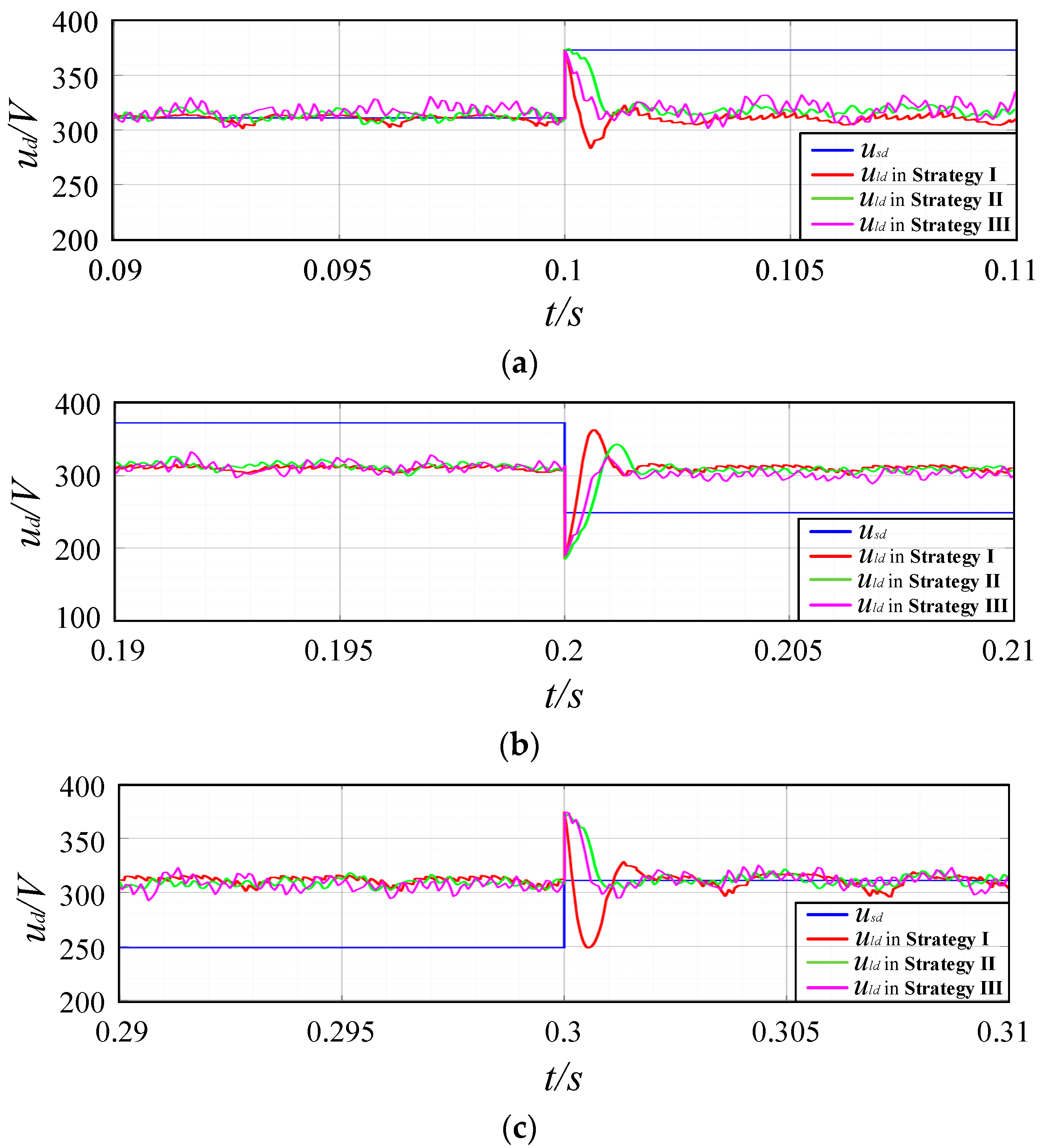
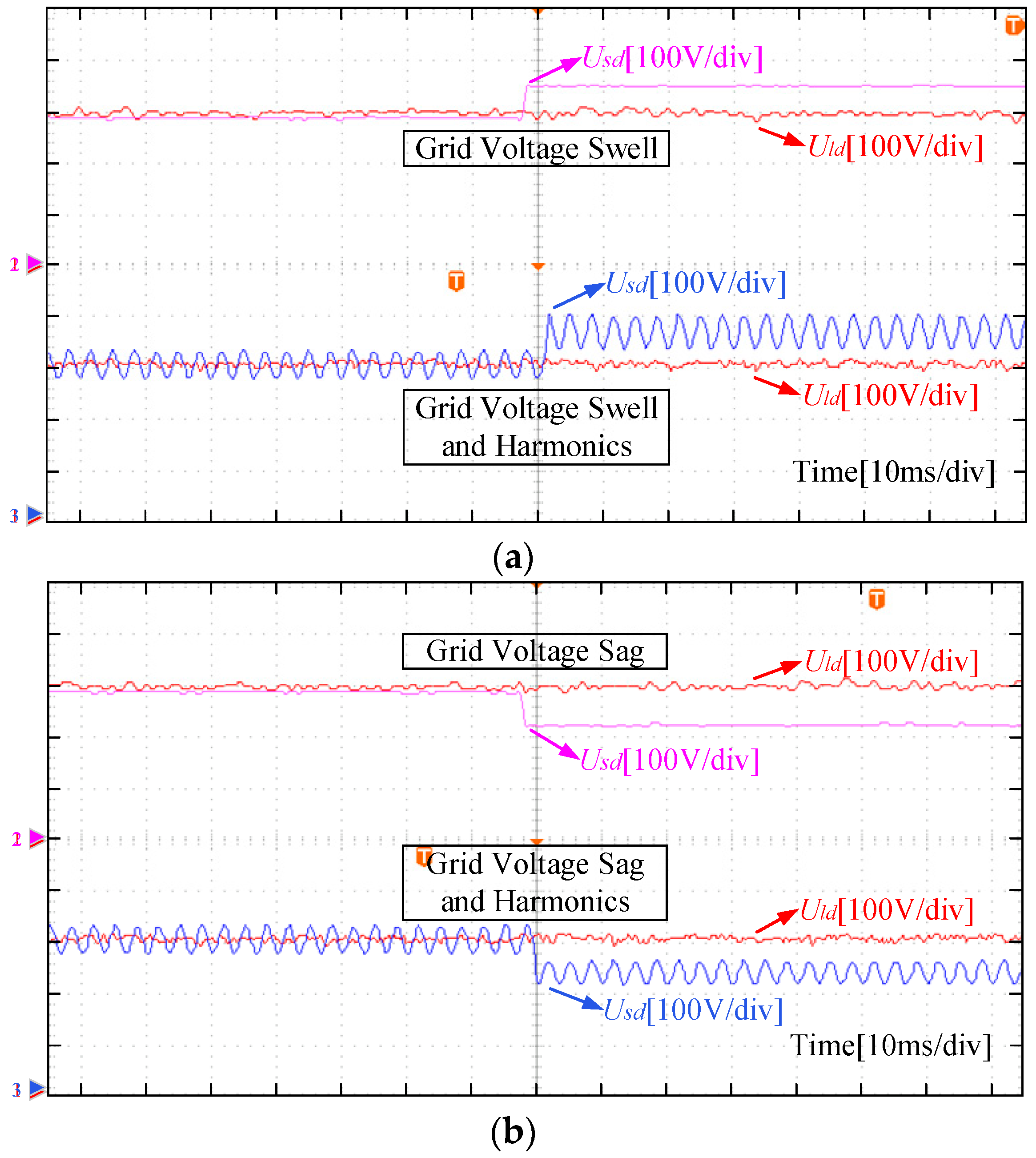
4.1.1. Dynamic and Steady-State Performance of the Voltage Amplitude Compensation
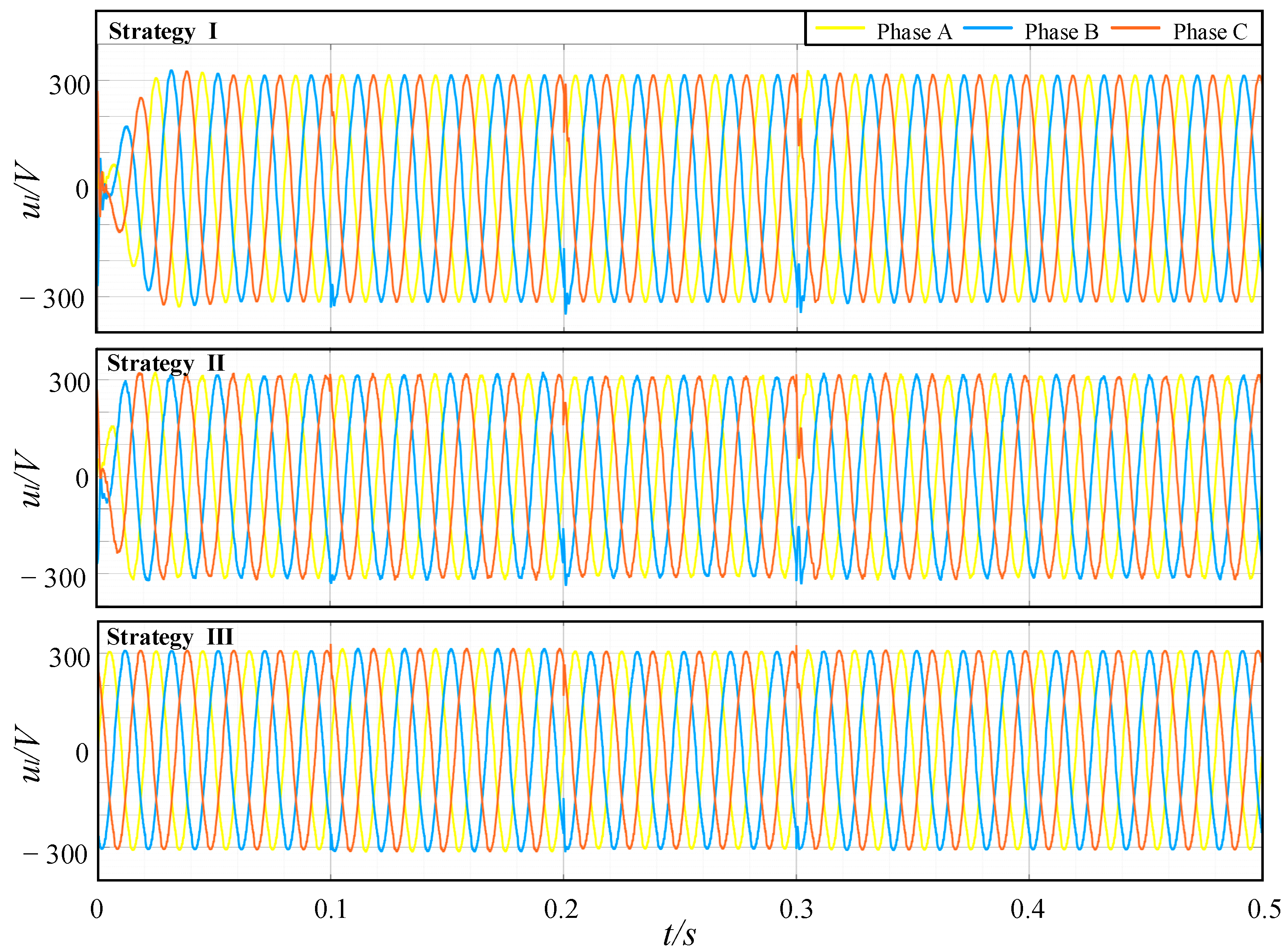
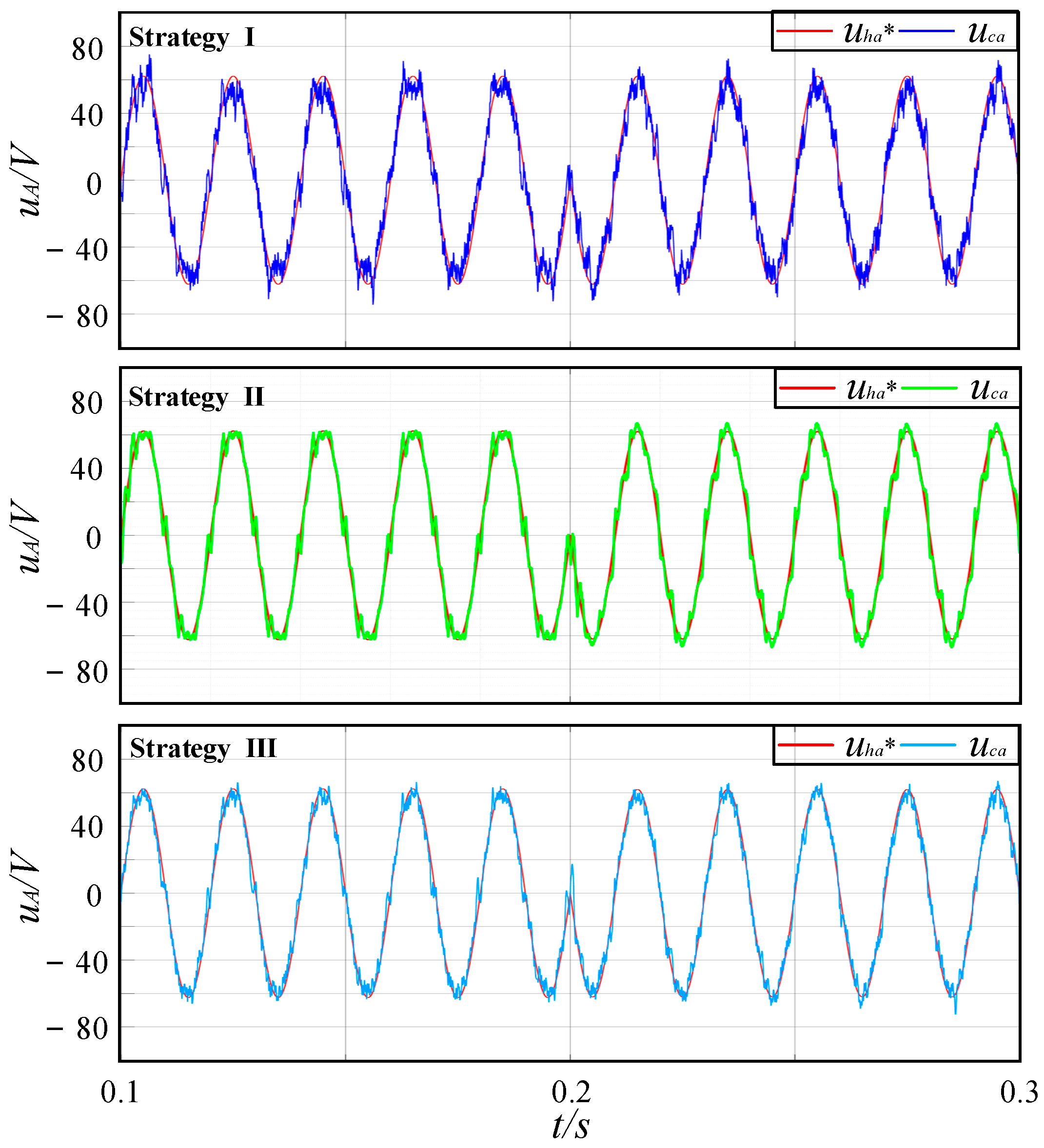
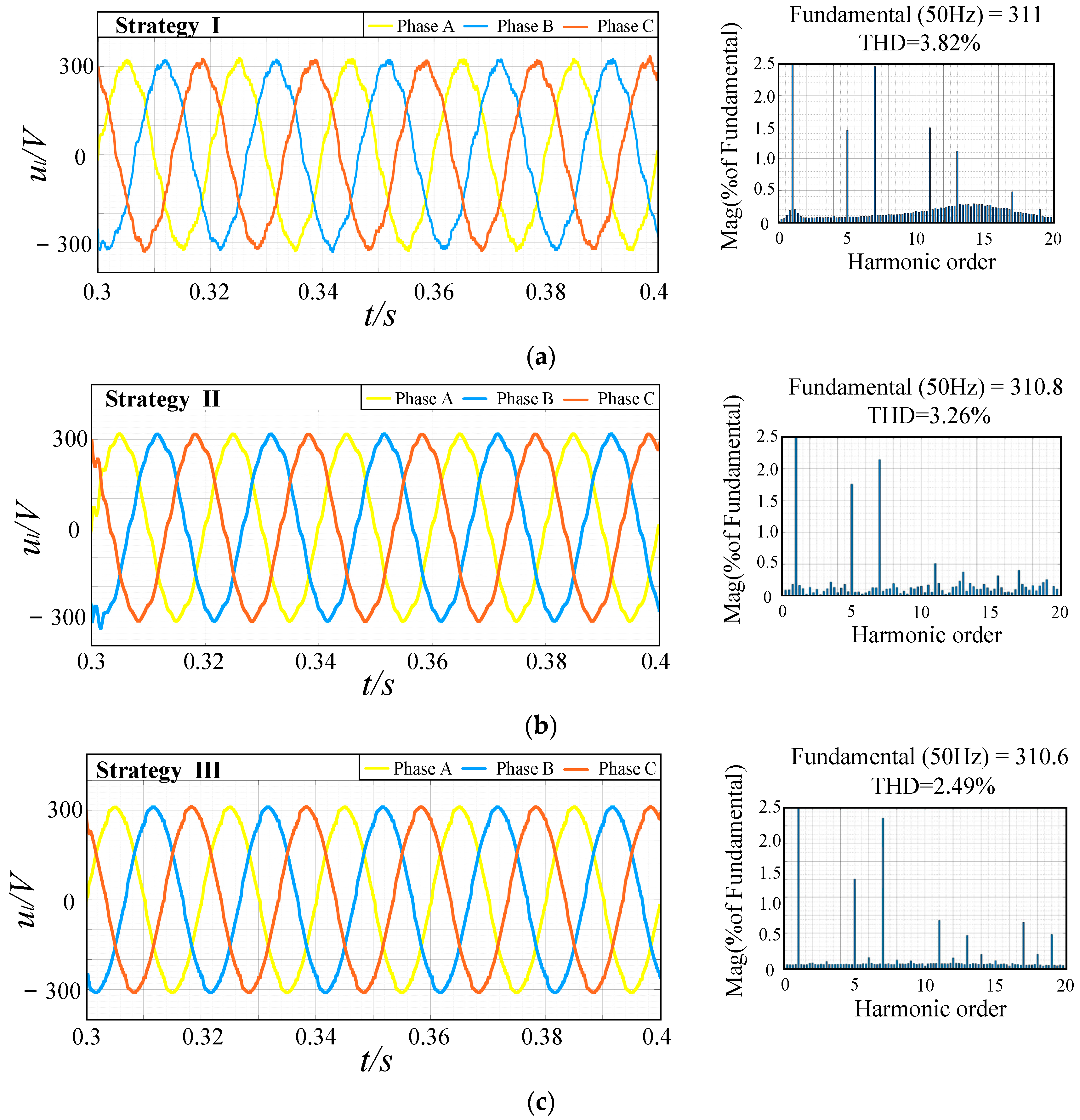
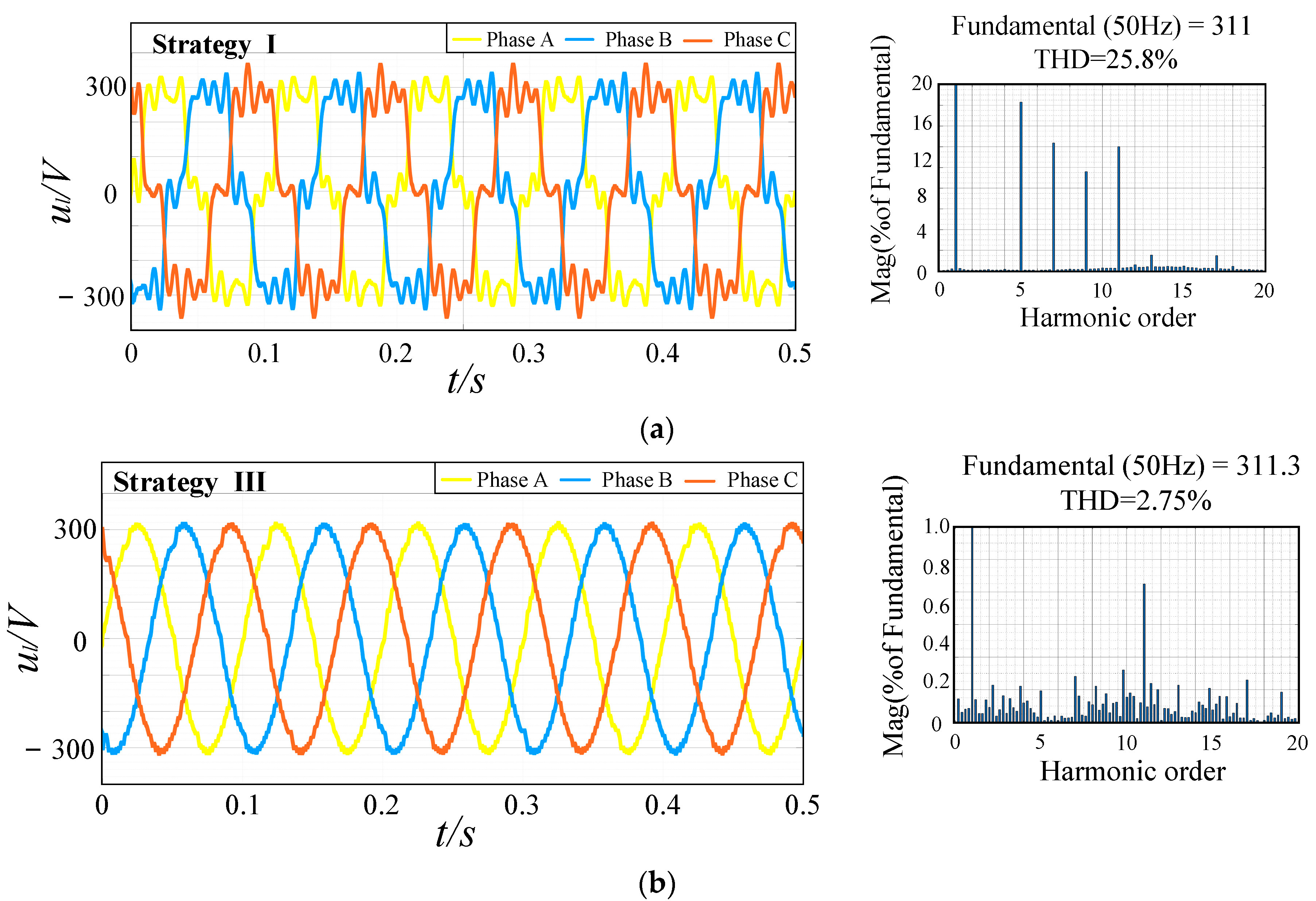
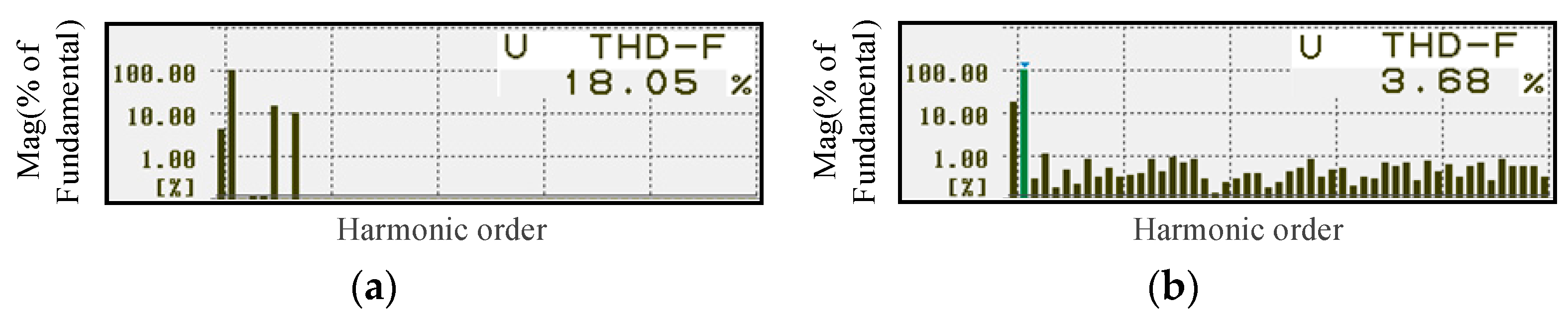
4.1.2. Compensation Performance of the Full-Frequency Harmonic Voltage
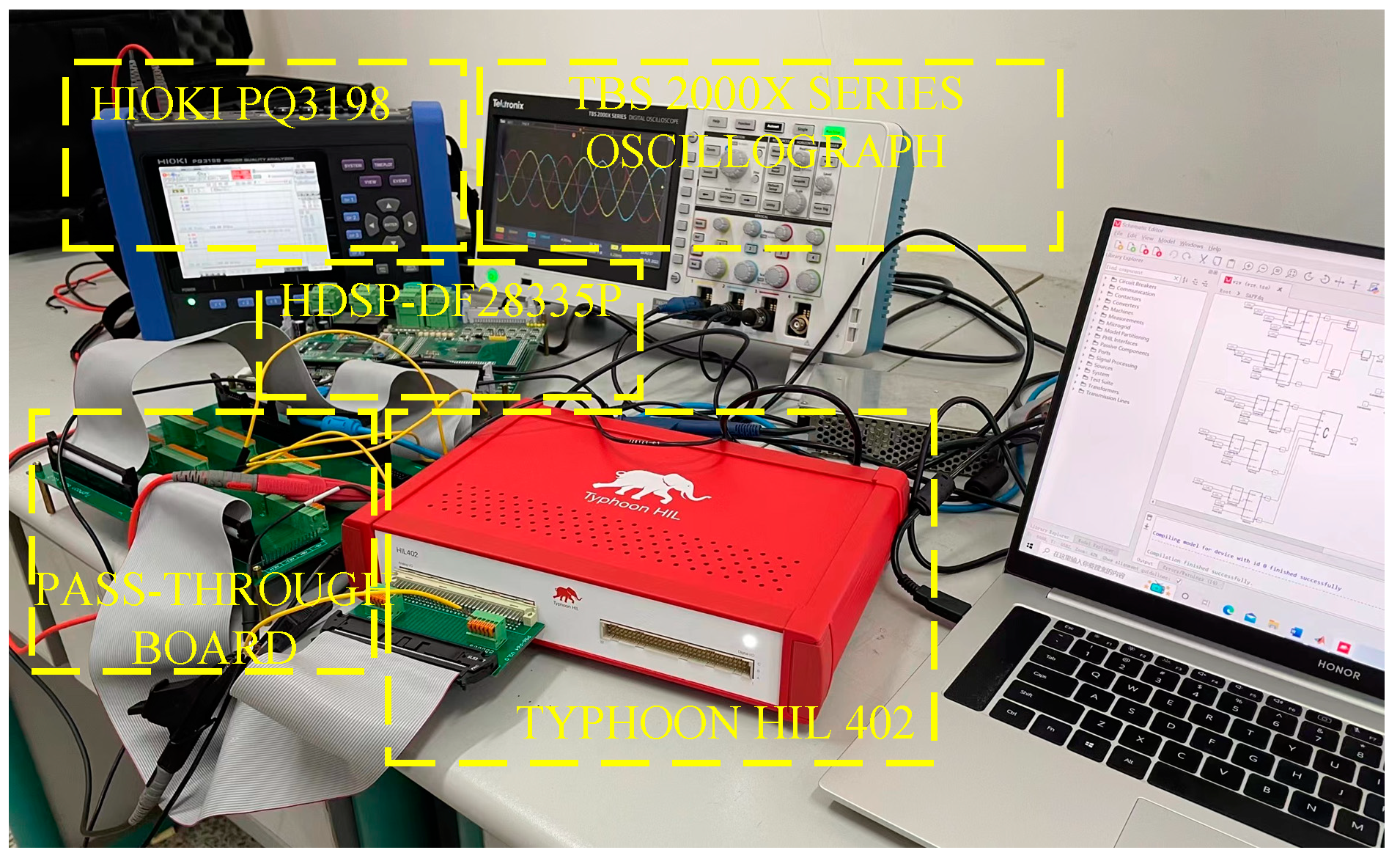
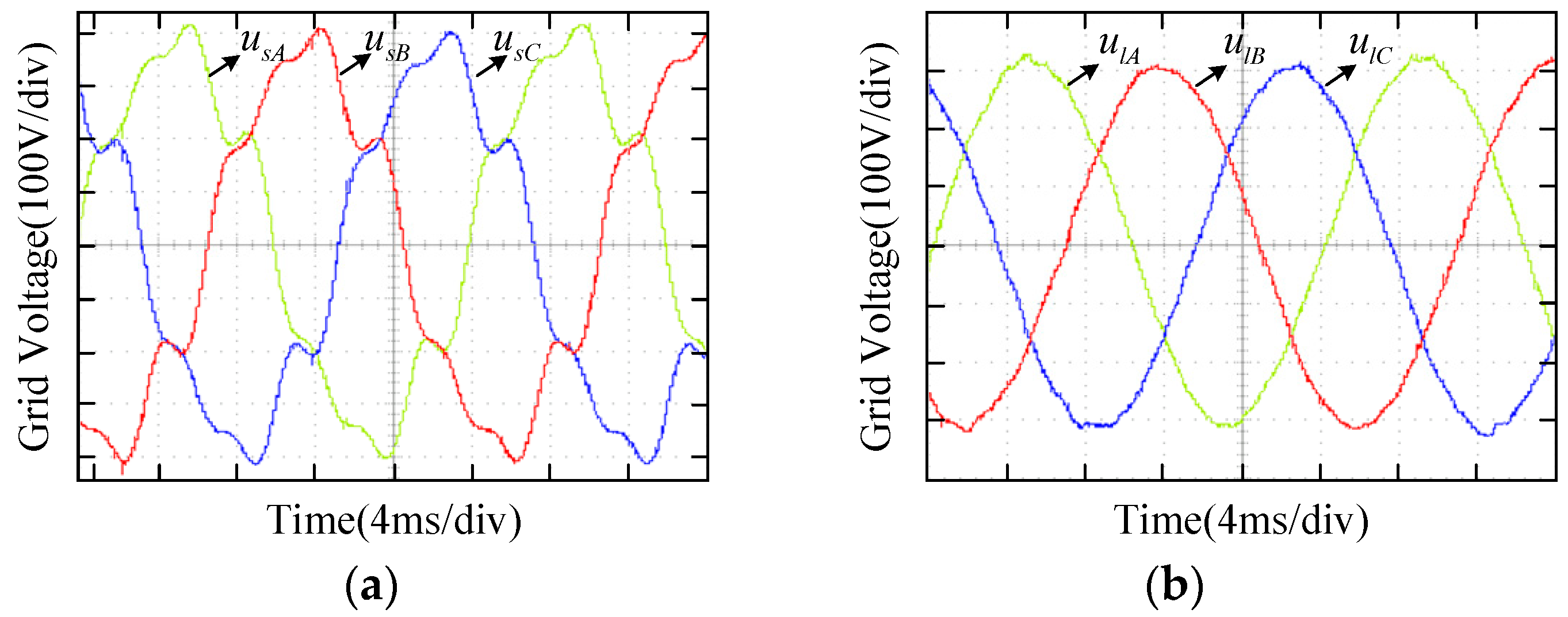
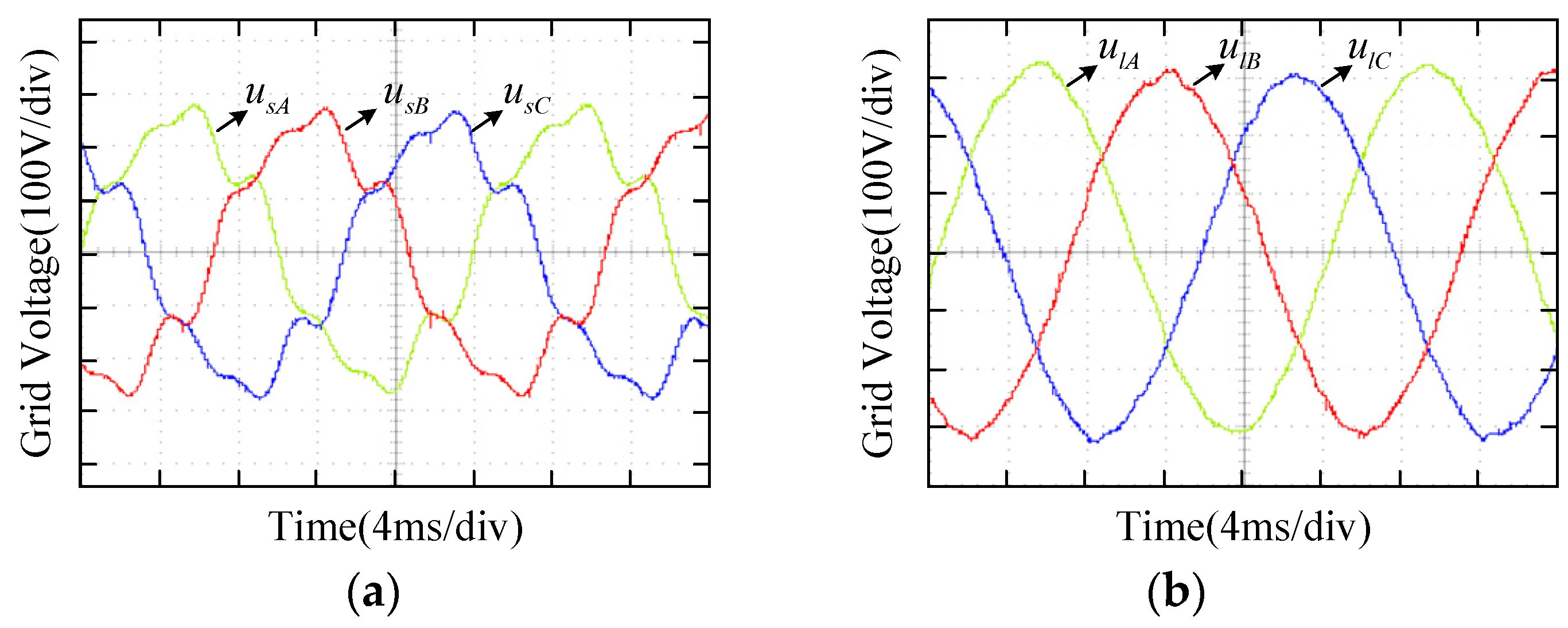
4.2. Experimental Analysis
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Turovi, R.; Dragan, D.; Goji, G.; Petrovi, V.-B.; Gajic, D.-B.; Stanisavljevi, A.-M.; Kati, V.-A. An End-to-End Deep Learning Method for Voltage Sag Classification. Energies 2022, 15, 2898. [Google Scholar] [CrossRef]
- Garnica López, M.A.; de Vicuña, J.L.G.; Miret, J.; Castilla, M.; Guzmán, R. Control Strategy for Grid-Connected Three-Phase Inverters During Voltage Sags to Meet Grid Codes and to Maximize Power Delivery Capability. IEEE Trans. Power Electron. 2018, 33, 9360–9374. [Google Scholar] [CrossRef] [Green Version]
- Wang, L.; Lam, C.-S.; Wong, M.-C. Analysis, Control, and Design of a Hybrid Grid-Connected Inverter for Renewable Energy Generation with Power Quality Conditioning. IEEE Trans. Power Electron. 2018, 33, 6755–6768. [Google Scholar] [CrossRef]
- Choi, W.; Lee, W.; Han, D.; Sarlioglu, B. New Configuration of Multifunctional Grid-Connected Inverter to Improve Both Current-Based and Voltage-Based Power Quality. IEEE Trans. Ind. Appl. 2018, 54, 6374–6382. [Google Scholar] [CrossRef]
- Fujita, H.; Akagi, H. An Approach to Harmonic Current-Free AC/DC Power Conversion for Large Industrial Loads: The Integration of a Series Active Filter with a Double-series Diode Rectifier. IEEE Trans. Ind. Appl. 1997, 33, 1233–1240. [Google Scholar] [CrossRef] [Green Version]
- Can, E. The Levels Effect of the Voltage Generated by an Inverter with Partial Source on Distortion. Int. J. Electron. 2020, 107, 1414–1435. [Google Scholar] [CrossRef]
- Radzi, M.A.M.; Rahim, N.-A. Neural Network and Bandless Hysteresis Approach to Control Switched Capacitor Active Power Filter for Reduction of Harmonics. IEEE Trans. Ind. Electron. 2009, 56, 1477–1484. [Google Scholar] [CrossRef]
- Fereidouni, A.; Masoum, M.A.S.; Smedley, K.-M. Supervisory Nearly Constant Frequency Hysteresis Current Control for Active Power Filter Applications in Stationary Reference Frame. IEEE Power Energy Technol. Syst. J. 2016, 3, 1–12. [Google Scholar] [CrossRef]
- Gong, C.; Sou, W.-K.; Lam, C.-S. Design and Analysis of Vector Proportional–Integral Current Controller for LC-Coupling Hybrid Active Power Filter with Minimum DC-Link Voltage. IEEE Trans. Power Electron. 2021, 36, 9041–9056. [Google Scholar] [CrossRef]
- Alam, S.-J.; Arya, S.-R. Control of UPQC Based on Steady State Linear Kalman Filter for Compensation of Power Quality Problems. Chin. J. Electr. Eng. 2020, 6, 52–65. [Google Scholar] [CrossRef]
- Can, E.; Sayan, H.-H. PID and Fuzzy Controlling Three Phase Asynchronous machine by Low Level DC Source Three Phase Inverter. Teh. Vjesn. Tech. Gaz. 2016, 23, 753–760. [Google Scholar]
- Pandove, G.; Singh, M. Robust Repetitive Control Design for a Three-Phase Four Wire Shunt Active Power Filter. IEEE Trans. Ind. Inform. 2019, 15, 2810–2818. [Google Scholar] [CrossRef]
- Geng, H.; Zheng, Z.; Zou, T.; Chu, B.; Chandra, A. Fast Repetitive Control with Harmonic Correction Loops for Shunt Active Power Filter Applied in Weak Grid. IEEE Trans. Ind. Appl. 2019, 55, 3198–3206. [Google Scholar] [CrossRef]
- Wang, H.; Wu, X.; Zheng, X.; Yuan, X. An Improved Hysteresis Current Control Scheme During Grid Voltage Zero-Crossing for Grid-Connected Three-Level Inverters. IET Power Electron. 2021, 14, 1946–1959. [Google Scholar] [CrossRef]
- Sou, W.-K.; Chao, C.-W.; Gong, C.; Lam, C.-S.; Wong, C.-K. Analysis, Design, and Implementation of Multi-Quasi-Proportional-Resonant Controller for Thyristor-Controlled LC-Coupling Hybrid Active Power Filter (TCLC-HAPF). IEEE Trans. Ind. Electron. 2022, 69, 29–40. [Google Scholar] [CrossRef]
- Dragičević, T.; Zheng, C.; Rodriguez, J.; Blaabjerg, F. Robust Quasi-Predictive Control of LCL-Filtered Grid Converters. IEEE Trans. Power Electron. 2020, 35, 1934–1946. [Google Scholar] [CrossRef]
- Jian, L.; Li, X.; Zhu, J.; Zhang, H.; Li, F. Dual Closed-Loops Current Controller for a 4-Leg Shunt APF Based on Repetitive Control. Int. J. Electron. 2019, 106, 349–364. [Google Scholar] [CrossRef]
- Can, E.; Sayan, H.-H. The Increasing Harmonic Effects of SSPWM Multilevel Inverter Controlling Load Currents Investigated on Modulation Index. Teh. Vjesn. Tech. Gaz. 2017, 24, 397–404. [Google Scholar]
- Shu, Z.; Lin, H.; Zhang, Z.; Yin, X.; Zhou, Q. Specific Order Harmonics Compensation Algorithm and Digital Implementation for Multi-level Active Power Filter. IET Power Electron. 2016, 10, 525–535. [Google Scholar] [CrossRef]
- Can, E.; Sayan, H.-H. A Novel SSPWM Controlling Inverter Running Nonlinear Device. Electr. Eng. 2018, 100, 39–46. [Google Scholar] [CrossRef]
- Wang, Z.; Chai, J.; Sun, X.; Lu, H. Predictive Deviation Filter for Deadbeat Control. IET Electr. Power Appl. 2020, 14, 1041–1049. [Google Scholar] [CrossRef]
- Xue, C.; Ding, L.; Tian, H.; Li, Y. Multirate Finite-Control-Set Model Predictive Control for High Switching Frequency Power Converters. IEEE Trans. Ind. Electron. 2022, 69, 3382–3392. [Google Scholar] [CrossRef]
- Vazquez, S.; Zafra, E.; Aguilera, R.-P.; Geyer, T.; Leon, J.-I.; Franquelo, L.-G. Prediction Model with Harmonic Load Current Components for FCS-MPC of an Uninterruptible Power Supply. IEEE Trans. Power Electron. 2022, 37, 322–331. [Google Scholar] [CrossRef]
- Long, B.; Zhu, Z.; Yang, W.; Chong, K.-T.; Rodríguez, J.; Guerrero, J.-M. Gradient Descent Optimization Based Parameter Identification for FCS-MPC Control of LCL-Type Grid Connected Converter. IEEE Trans. Ind. Electron. 2022, 69, 2631–2643. [Google Scholar] [CrossRef]
- Mohammed, A.; Paolo, M.; Pooya, D. Harmonics Mitigation and Non-ideal Voltage Compensation Utilising Active Power Filter Based on Predictive Current Control. IET Power Electron. 2020, 13, 2782–2793. [Google Scholar]
- Ferreira, S.-C.; Gonzatti, R.-B.; Pereira, R.-R.; da Silva, C.-H.; da Silva, L.E.B.; Lambert-Torres, G. Finite Control Set Model Predictive Control for Dynamic Reactive Power Compensation with Hybrid Active Power Filters. IEEE Trans. Ind. Electron. 2018, 65, 2608–2617. [Google Scholar] [CrossRef]
- Panten, N.; Hoffmann, N.; Fuchs, F.-W. Finite Control Set Model Predictive Current Control for Grid-Connected Voltage-Source Converters with LCL Filters: A Study Based on Different State Feedbacks. IEEE Trans. Power Electron. 2016, 31, 5189–5200. [Google Scholar] [CrossRef]
- Wang, W.; Liu, C.; Zhao, H.; Song, Z. Improved Deadbeat-Direct Torque and Flux Control for PMSM With Less Computation and Enhanced Robustness. IEEE Trans. Ind. Electron. 2023, 70, 2254–2263. [Google Scholar] [CrossRef]
- Yao, Y.; Huang, Y.; Peng, F.; Dong, J.; Zhang, H. An Improved Deadbeat Predictive Current Control with Online Parameter Identification for Surface-Mounted PMSMs. IEEE Trans. Ind. Electron. 2020, 67, 10145–10155. [Google Scholar] [CrossRef] [Green Version]
- Karbasforooshan, M.-S.; Monfared, M. An Improved Reference Current Generation and Digital Deadbeat Controller for Single-Phase Shunt Active Power Filters. IEEE Trans. Power Deliv. 2020, 35, 2663–2671. [Google Scholar] [CrossRef]
- Sou, W.-K.; Choi, W.-H.; Chao, C.-W.; Lam, C.-S.; Gong, C.; Wong, C.-K.; Wong, M.-C. A Deadbeat Current Controller of LC-Hybrid Active Power Filter for Power Quality Improvement. IEEE J. Emerg. Sel. Top. Power Electron. 2020, 8, 3891–3905. [Google Scholar] [CrossRef]
- Parul, C.; Singh, G. Fault Mitigation Through Multi Converter UPQC with Hysteresis Controller in Grid Connected Wind System. J. Ambient Intell. Humaniz. Comput. 2020, 11, 5279–5295. [Google Scholar]
- Wang, G.; Gao, X.; Wu, Z.; Guo, J.; Liu, Z. Research on a Finite Control Set Model Predictive Control Strategy for Series APF Based on Deadbeat Outer Loop Control. Power Syst. Clean Energy 2022, 38, 15–23. [Google Scholar]
- CENELEC—EN 61000-2-2; Electromagnetic Compatibility (EMC)-Part 2-2: Environment-Compatibility Levels for Low-Frequency Conducted Disturbances and Signalling in Public Low-Voltage Power Supply Systems. European Committee for Electrotechnical Standardization (CENELEC): Brussels, Belgium, 2002.



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Simulation Parameters | Numerical Values |
|---|---|
| Grid Voltage/Frequency | 220 V/50 Hz |
| Series Transformer Ratio | 1:1 |
| Nonlinear Resistive Load | L = 10 mH, R = 30 Ω |
| Filter Capacitor and Inductor | Lf = 5 mH, Cf = 100 μF, Rf = 2 Ω |
| DC Voltage | Udc = 700 V |
| FCS–MPC Control Period | Ts = 83 μs |
| Contrast Items | Strategy I | Strategy II | Strategy III |
|---|---|---|---|
| THD before compensation (%) | 18.03 | 18.03 | 18.03 |
| THD after compensation (%) | 3.82 | 3.26 | 2.49 |
| Actual sampling frequency (kHz) | 2 | 12 | 12 |
| Equivalent switching frequency (kHz) | 2 | 2.6 | 3.4 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, G.; Gao, X.; Li, C. An FCS-MPC Strategy for Series APF Based on Deadbeat Direct Compensation. Energies 2023, 16, 2507. https://doi.org/10.3390/en16052507
Wang G, Gao X, Li C. An FCS-MPC Strategy for Series APF Based on Deadbeat Direct Compensation. Energies. 2023; 16(5):2507. https://doi.org/10.3390/en16052507
Chicago/Turabian StyleWang, Guifeng, Xujie Gao, and Chunjie Li. 2023. "An FCS-MPC Strategy for Series APF Based on Deadbeat Direct Compensation" Energies 16, no. 5: 2507. https://doi.org/10.3390/en16052507