1. Introduction
Power electronics is a discipline that is increasingly involved in all stages of electrical energy processing, such as generation, conversion, transmission, distribution, and conditioning in its different stages and forms (CA → CC, CC → CA, etc.). Nevertheless, power electronic converters are restricted in their operational capabilities by switching devices, the limitations of which are imposed by the physical characteristics of semiconductor materials. In this regard, much research is being carried out around developing new semiconductor switching devices with higher voltage withstand capabilities. However, the goal of increasing the operating voltage of converters with existing circuit breakers also finds its way with the introduction of multilevel converters.
Multilevel converters are very attractive for high-power motor drives and uninterruptible power system applications [
1,
2]. The main reason is that they offer low harmonic content [
3], higher efficiency [
4], and increased device utilization at low modulation indices [
5], among other features. Well-established topologies in the industrial and research area are Neutral-Point-Clamped (NPC) [
6,
7], Flying Capacitor (FC) [
8,
9], and cascade H-bridge (CHB) [
10]. The NPC converter has a simple design. However, as the number of voltage levels increases, the number of clamping diodes increases, as well as the complexity of voltage balance control [
11,
12,
13]. The FC and NPC converters are quite similar, as long as the clamping diodes in NPC are replaced with floating capacitors. As the number of voltage levels increases, it requires many capacitors and a complicated voltage balance control [
12,
13,
14]. The CHB converter, in particular, has the attractive feature of modularity and power scalability [
15,
16], voltage-level redundancies (or extra degrees of freedom) [
17,
18], and is more reliable compared to FC and NPC converters [
19].
From the point of view of applied current controllers to CHB converters, some are already presented in the literature. Decoupled control based on PI is widely used in power quality improvement applications, e.g., for a five-level CHB STATCOM [
20,
21]. In [
20], the gains of the PI controllers depend on the parameters of the filters. In [
21], the response time reaches almost 40 ms and for a delta-connected seven-level CHB STATCOM, in [
22] almost 10 ms. Furthermore, no robustness tests have been performed in any of these papers. The authors of [
23,
24] also used a PI as a current controller for a seven-level CHB STATCOM, and, in [
25], for a 25-level version, and in [
26], for a 45-level version. Although they obtained very good experimental results, the inner current controller is not their main contribution.
Lately, a fast dynamic response has been obtained with one of the most popular controllers, i.e., Model Predictive Control (MPC) variants. For a five-level CHB, the authors of [
18] achieved a response time of 1 ms and reduced computational cost, and the authors of [
27] proposed a long prediction horizon MPC, in which reference current tracking and common-mode voltage (CMV) minimization are achieved in a single optimization problem. In [
28], an MPC is proposed as a current controller (inner loop) and a Sliding Mode Control (SMC) as a DC-link voltage regulator (outer loop). Despite all advantages of MPC, when this control is implemented in power converters, the free modulation becomes a disadvantage due to the unfixed switching frequency [
29]. An interesting solution is shown in [
30], for a seven-level CHB converter.
On the other hand, SMC is a nonlinear controller currently being applied to different systems and is mainly being studied in power electronics due to its simple implementation [
31]. Most published articles refer to the application of this control technique (and some variants of it) to DC-DC converters [
32,
33], such as boost converters [
34,
35,
36,
37,
38,
39], buck converters [
40,
41,
42], buck-boost converters [
43], and, recently, to multiphase machines fed by DC-AC converters, such as two two-level voltage source converters [
44,
45] and matrix converters [
46]. However, only a few publications are related to SMC applied to multilevel converters: NPC inverter [
47] and modular multilevel converters (MMC) [
48,
49]. Then, there are no research studies about SMC applied to CHB as current controller, especially the seven-level version.
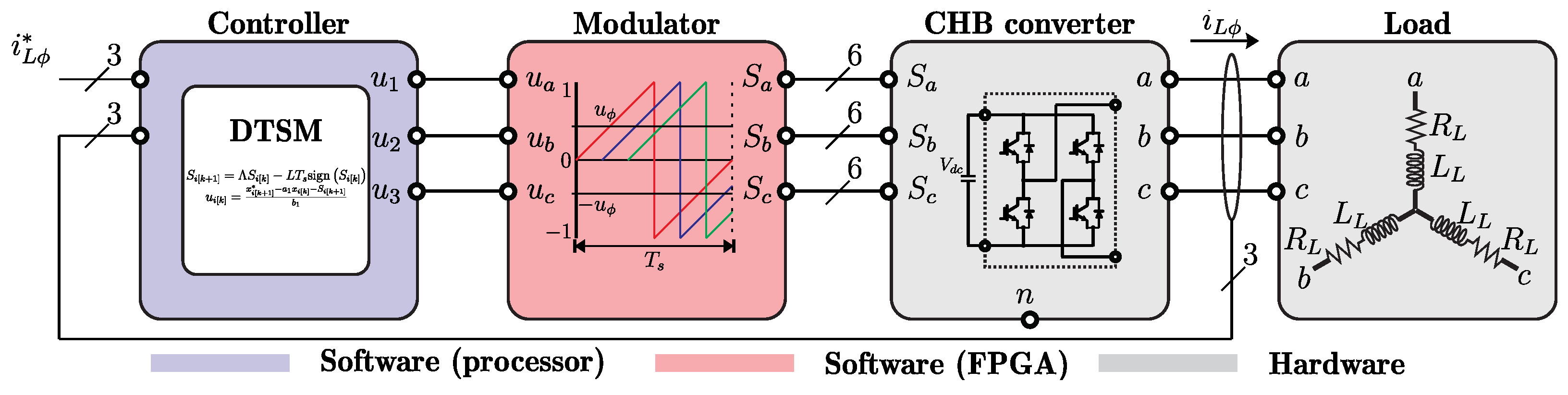
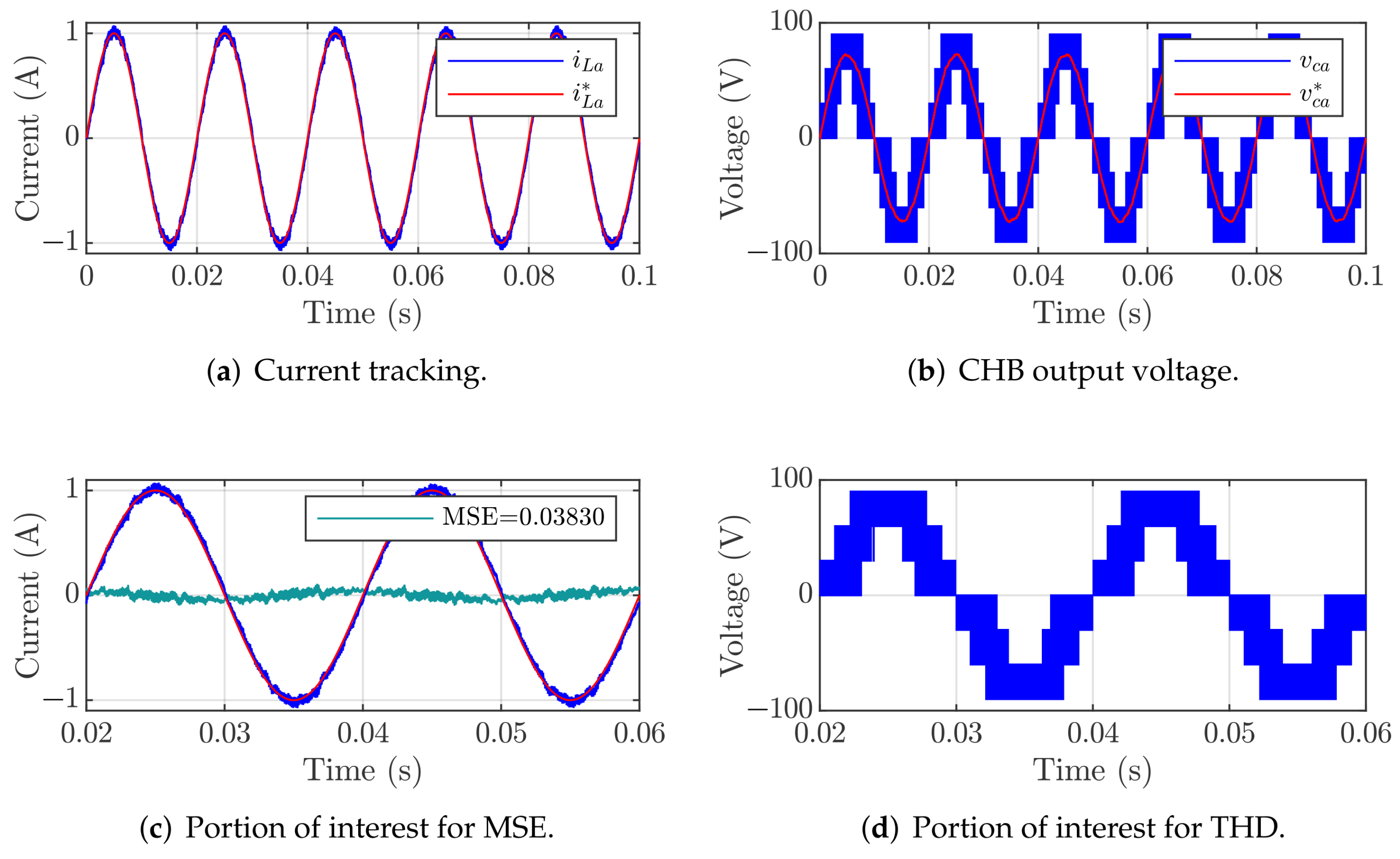
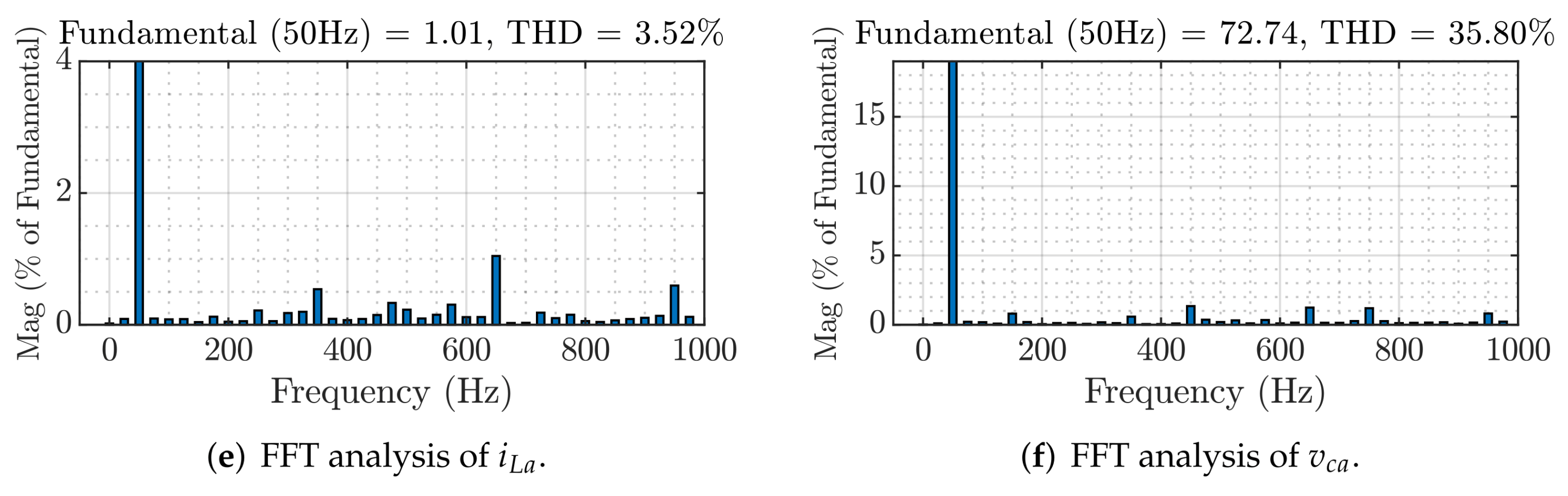
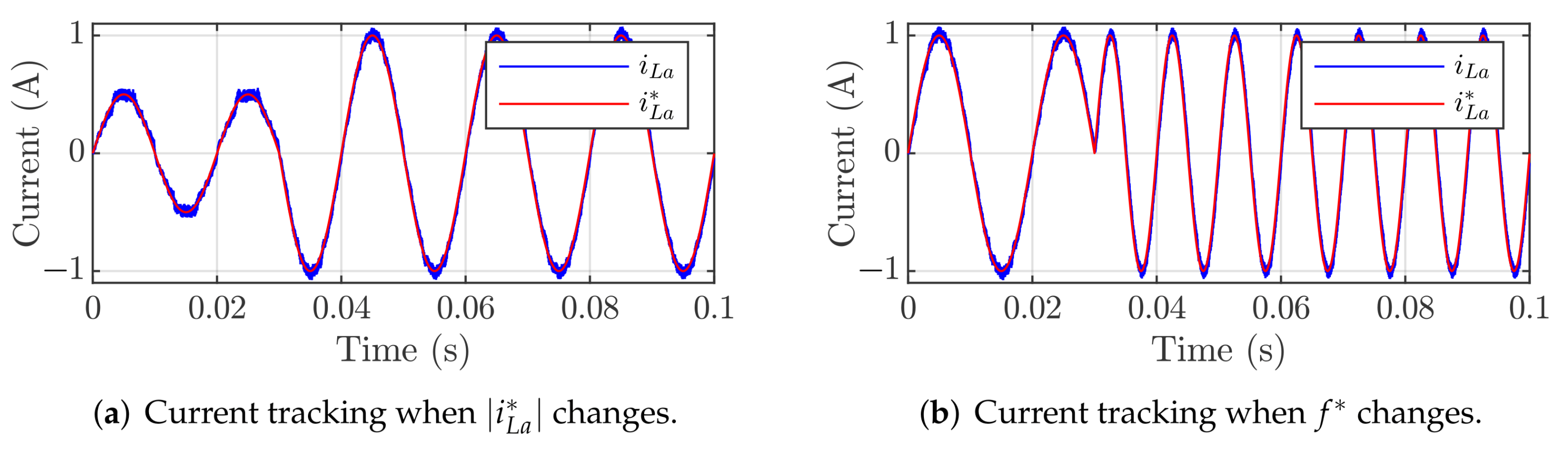
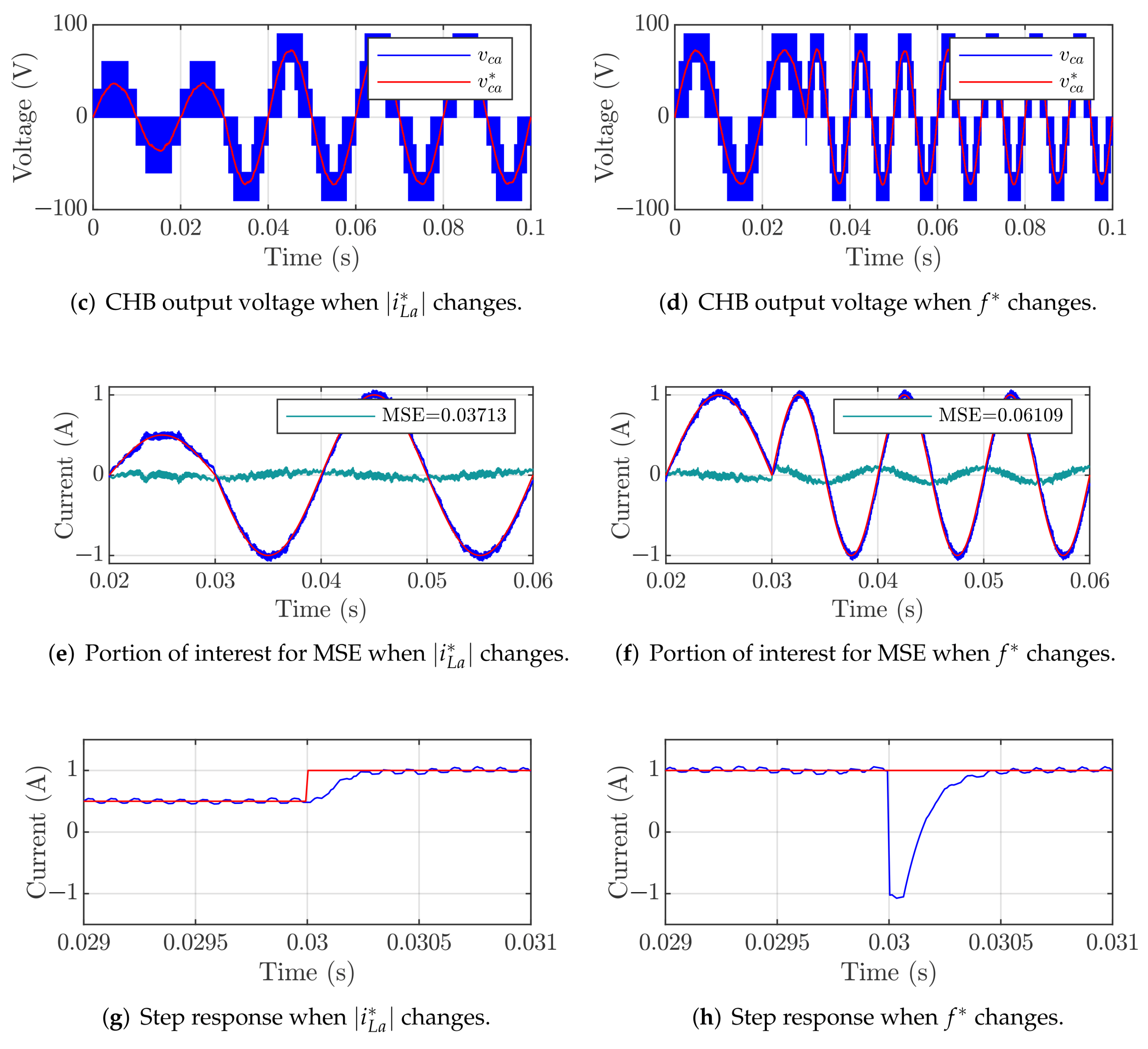
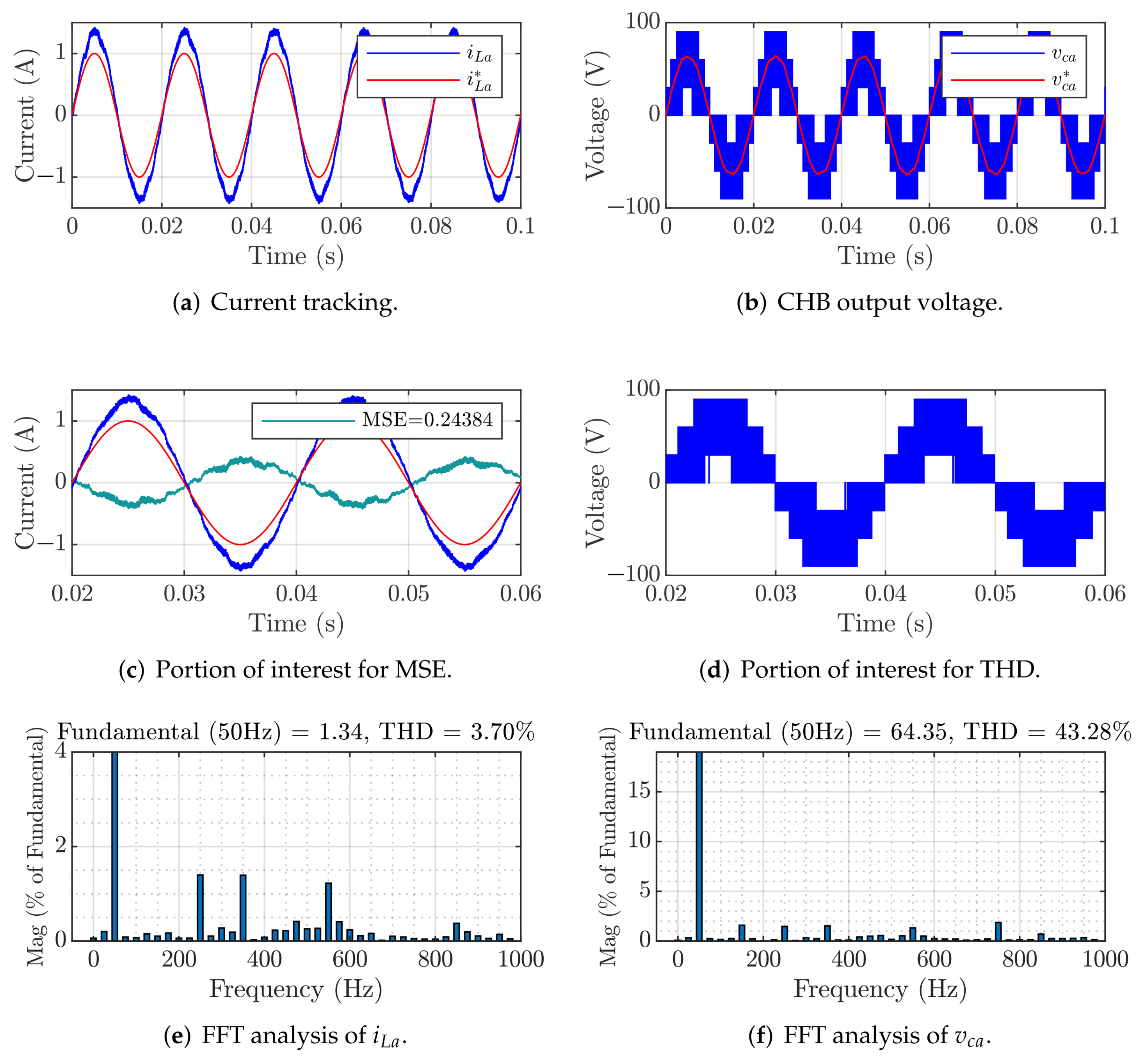
The paper’s primary focus is the implementation of the Discrete-Time Sliding Mode (DTSM) control applied to a seven-level CHB converter, which could present many advantages in comparison to already published current controllers (mainly, its robustness since it offers a tracking error close to zero and a fast dynamic response comparable to that of the MPC). Therefore, simulation and experimental tests have been added to demonstrate the performance of this particular controller. At the same time, the effectiveness of the DTSM is verified under steady-state and transient conditions, respectively, by measuring the mean square error (MSE) and total harmonic distortion (THD).
The manuscript is organized as follows: the topology description and mathematical model of the seven-level CHB are presented in
Section 2. In
Section 3, the DTSM controller is described.
Section 4 shows the simulation and experimental results in steady-state and transient conditions for performance analysis of the DTSM.
Section 5 exposes the comparative performance of DTSM with the popular MPC technique. Finally,
Section 6 summarizes the conclusion.
2. Topology Description and Mathematical Model
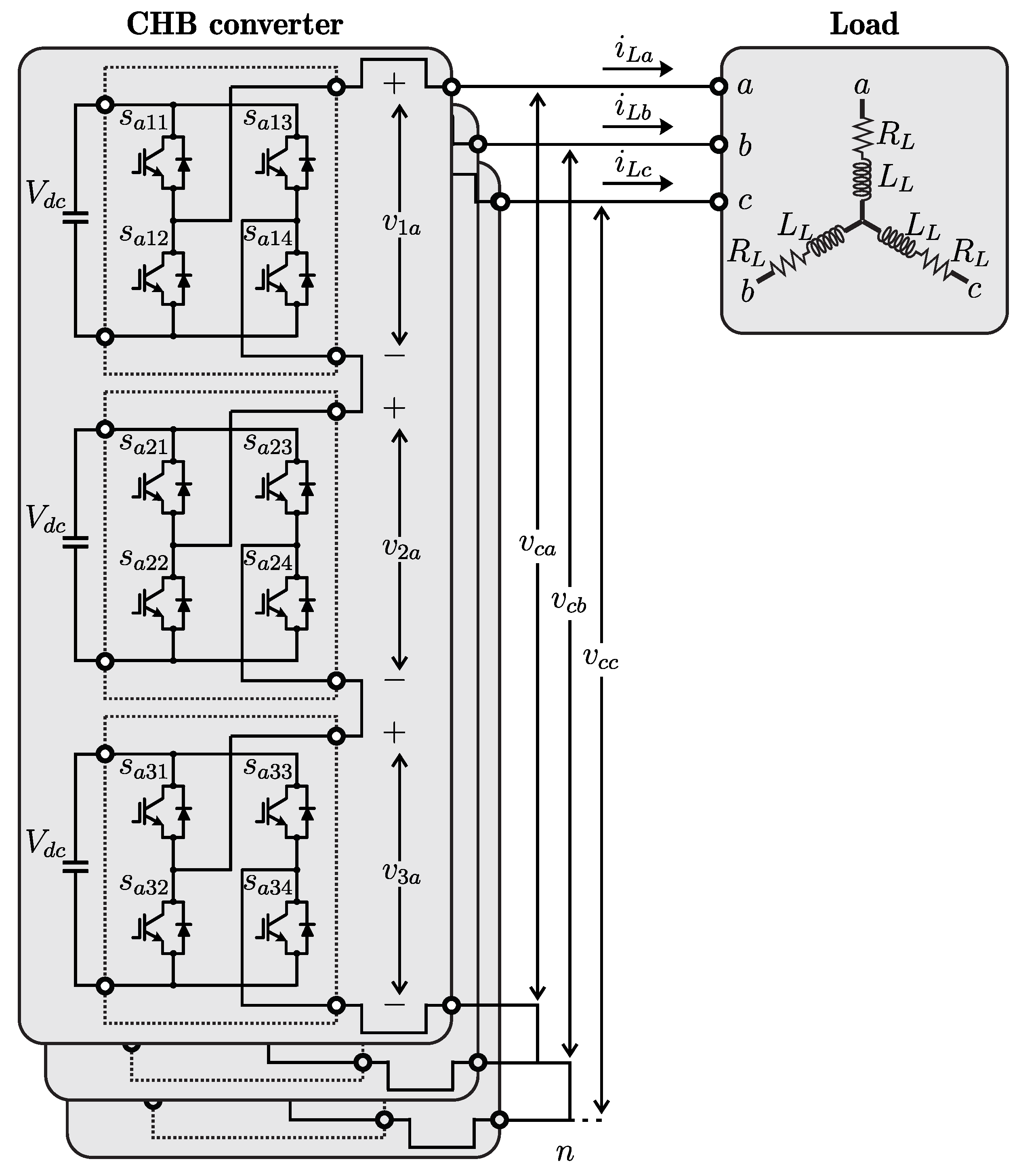
The three-phase seven-level CHB converter is shown in
Figure 1. Each leg is composed of 3 identical H-bridge cells, which means that all DC-link voltages have the same values
. The output voltage
of each cell depends on the states
(0 → open and 1 → closed) of the four switching devices, as described by:
where
i is the corresponding cell 1, 2 or 3,
j the corresponding switching device 1, 2, 3 or 4, and
the corresponding phase
a,
b or
c. However, only switches 1 and 3 are used to control one cell since they are always complementary with switches 2 and 4, respectively, to prevent short-circuit on DC-links. In this way,
has only three possible values, as shown in
Table 1.
The output voltage of the converter
can be obtained as the sum of the
voltages as follows:
and referring to
Table 1, the seven possible values for
are:
,
,
, 0,
,
, and
Considering the
-
load fed by the CHB converter as shown in
Figure 1, the continuous model (for each phase) of the system is:
where the load currents are defined by
considering that
includes the corresponding phase
a,
b or
c.
From Equation (
3), using forward Euler discretization, we obtain:
where
is the sampling time and
k identifies the actual discrete-time sample.
If state variables are defined by:
and the input and output variables by
the state-space representation is obtained:
where the coefficients
and
of Equation (
8) are defined according to the following equations:
6. Conclusions
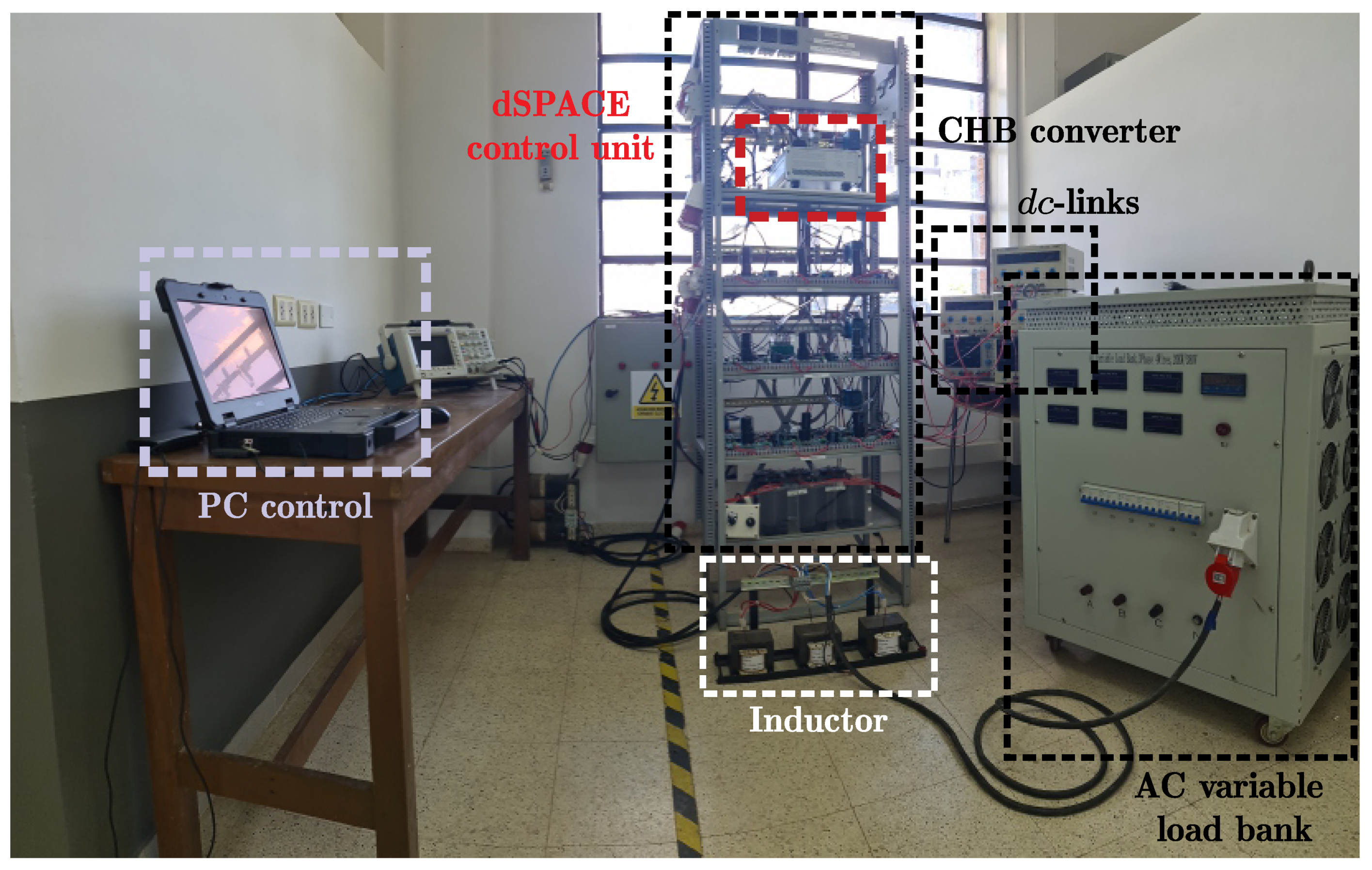
A real-time implementation of a discrete-time sliding mode control in combination with a modulation scheme based on phase-shifted carrier modulation was applied to a seven-level CHB converter based on SiC-MOSFET half-bridge modules.
Steady-state simulation results show that DTSM control has a 39% reduction in MSE of current tracking (0.03837 A vs. 0.06293 A on average) and a 51% reduction in THD of the load current (3.54% vs. 7.34% on average), compared to FCS-MPC. Transient-state simulation results show that DTSM control has a 9% reduction in MSE of current tracking (0.09702 A vs. 0.10645 A on average) and a similar rise-time (between 0.3 and 0.4 ms), compared to FCS-MPC.
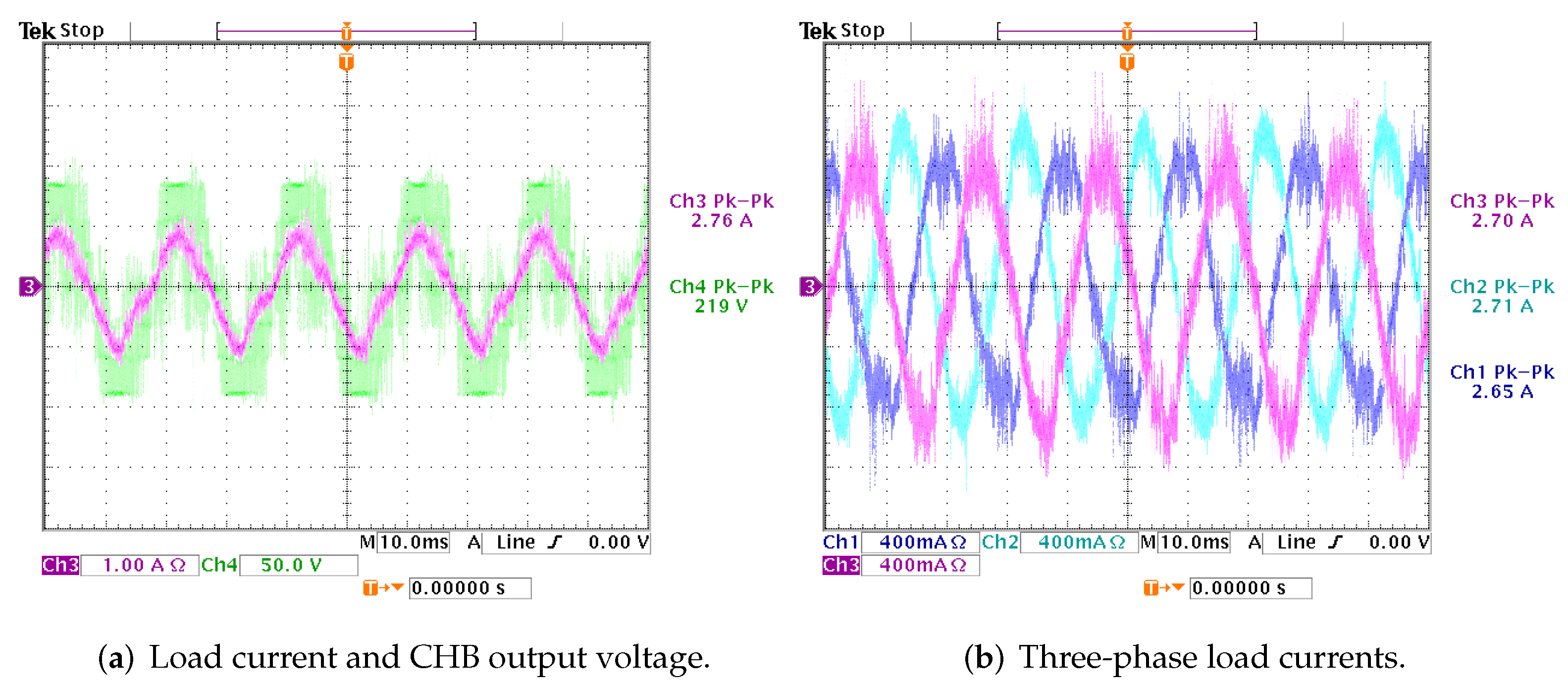
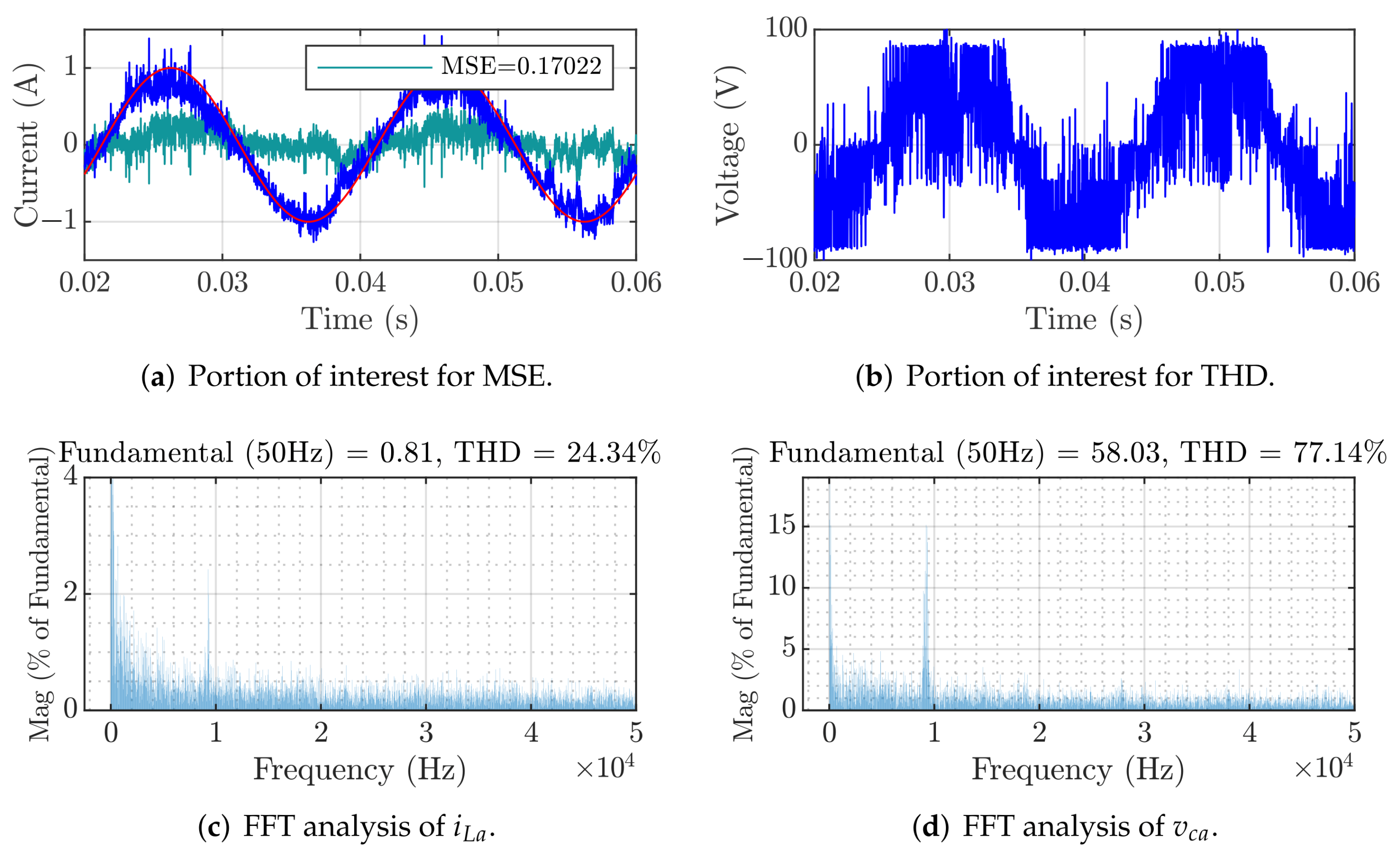
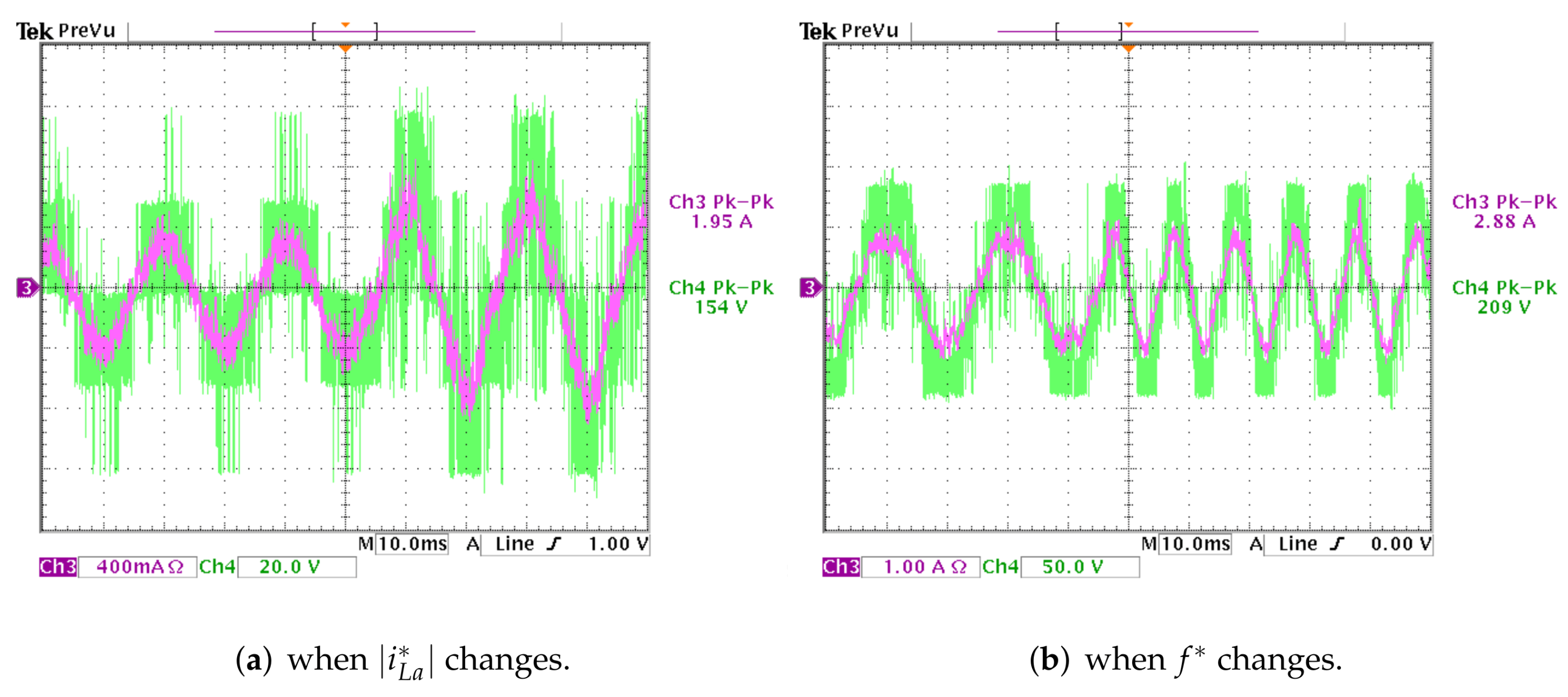
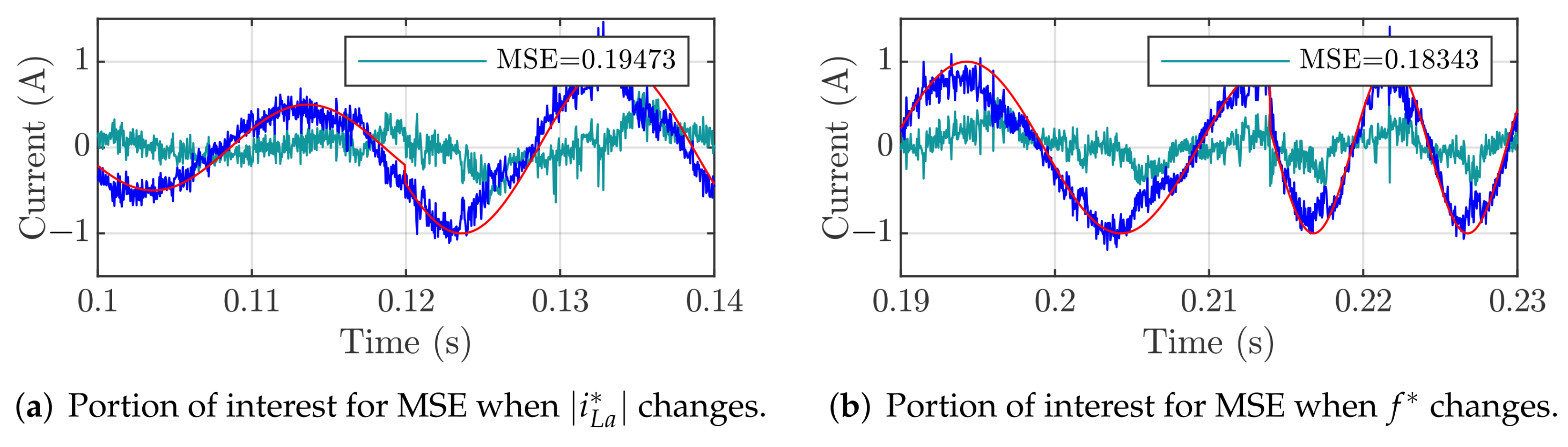
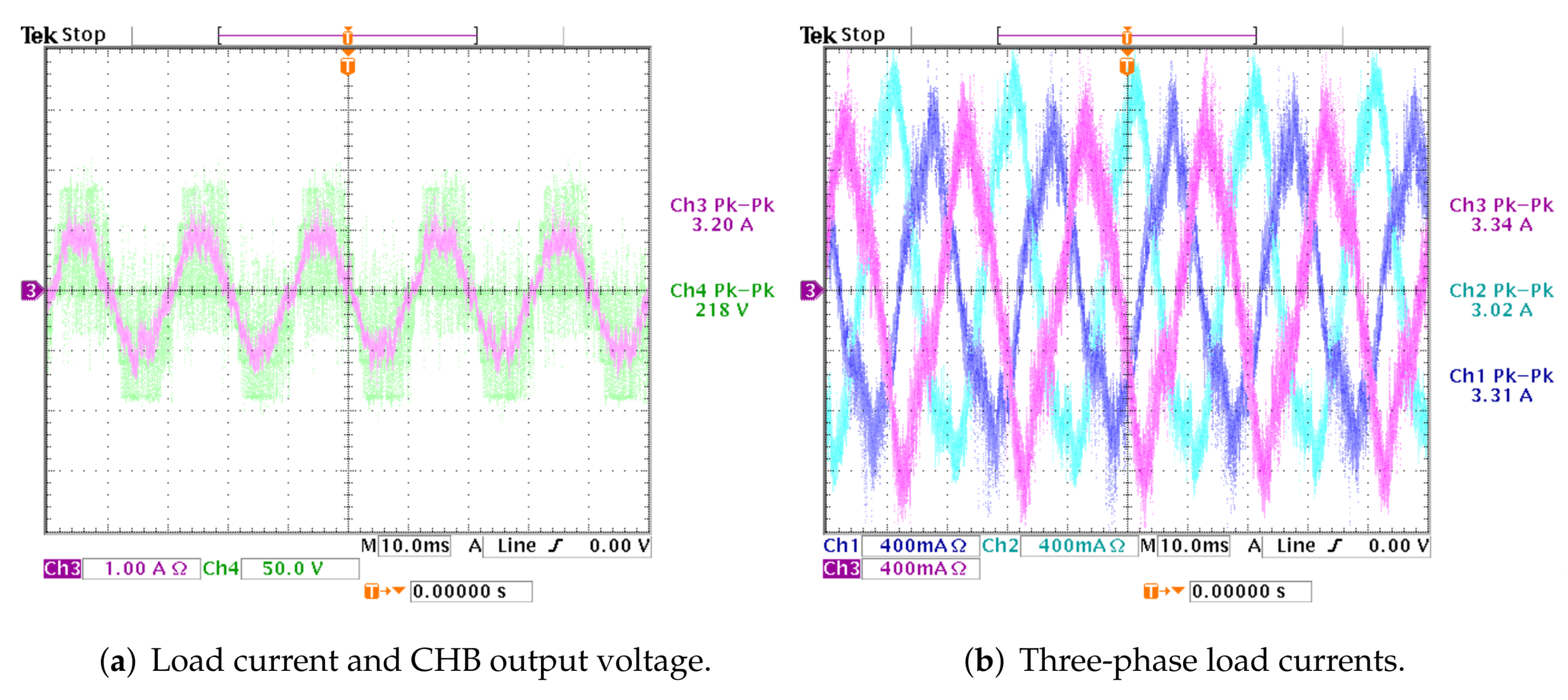
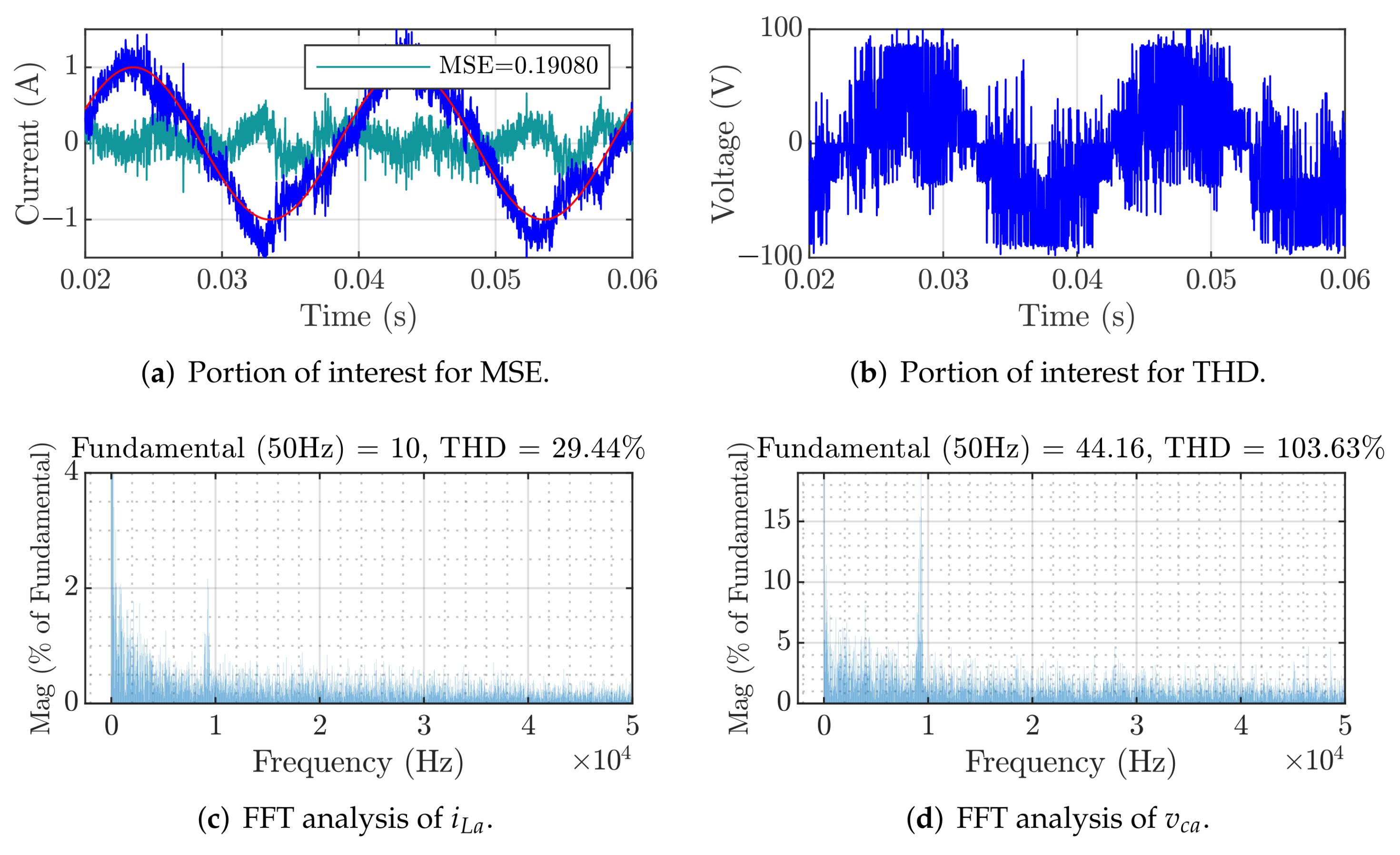
Steady-state experimental results show that DTSM control has a 22% reduction in MSE of current tracking (0.17053 A vs. 0.22066 A on average) and a slight 1% reduction in THD of the load current (24.62% vs. 24.87% on average), compared to FCS-MPC. Transient-state experimental results show that DTSM control has a 12% reduction in MSE of current tracking (0.19761 A vs. 0.22461 A on average) and a similar rise-time (between 0.4 and 0.5 ms), compared to FCS-MPC.
From the point of view of robustness, simulation and experimental results show that DTSM control is insensitive to load parameter variations in terms of THD of the load current, compared to steady-state results (simulation: 3.71% vs. 3.54%, experimental: 24.62% vs. 20.49% on average). In addition, in terms of MSE of current tracking, experimental results confirm that the proposed controller is robust against load parameter variations (experimental: 0.14655 A vs. 0.17053 A on average). In the robustness test, a slight increase in the THD of the output voltage is observed due to the need to synthesize a low voltage to maintain the same reference current amplitude.
The differences between simulations and experimental results are mainly due to the non-modeling of the circuits that involve the signal conditioners (digital and analog), snubbers, the switching devices, as well as the electrical noises (internal and external), and the delays associated with the digital implementation.



 ,
, 

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}