
Research on the Method of Near-Field Measurement and Modeling of Powerful Electromagnetic Equipment Radiation Based on Field Distribution Characteristics

Abstract
:1. Introduction
2. Near-Field Measurement Method of Powerful Electromagnetic Equipment Based on Field Distribution Characteristics
3. Equivalent Radiation Modeling of Low-Frequency Radiation Characteristics of Powerful Electromagnetic Equipment
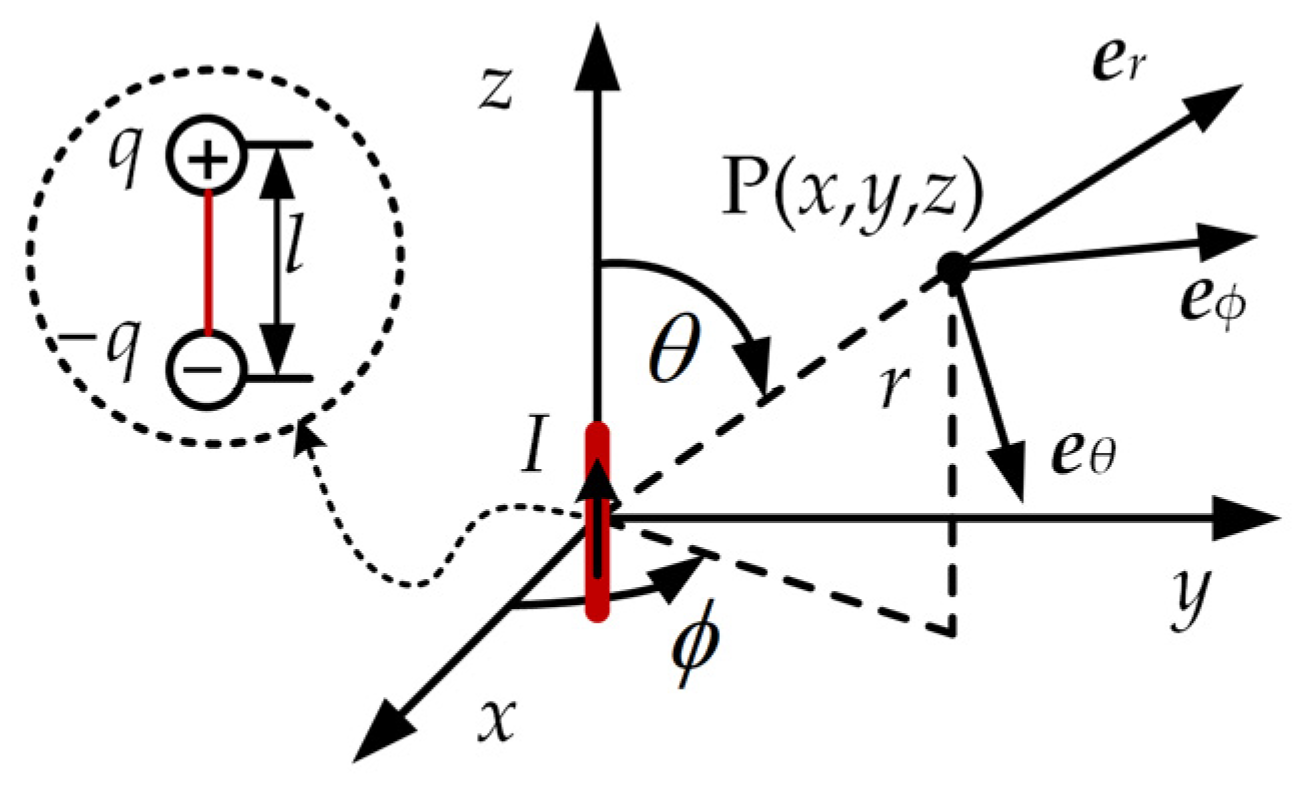
3.1. Equivalent Magnetic Dipole Array Model
3.2. The Solution of Ill-Conditioned Matrix
4. Experiment and Simulation Verification
4.1. Experiment Verification
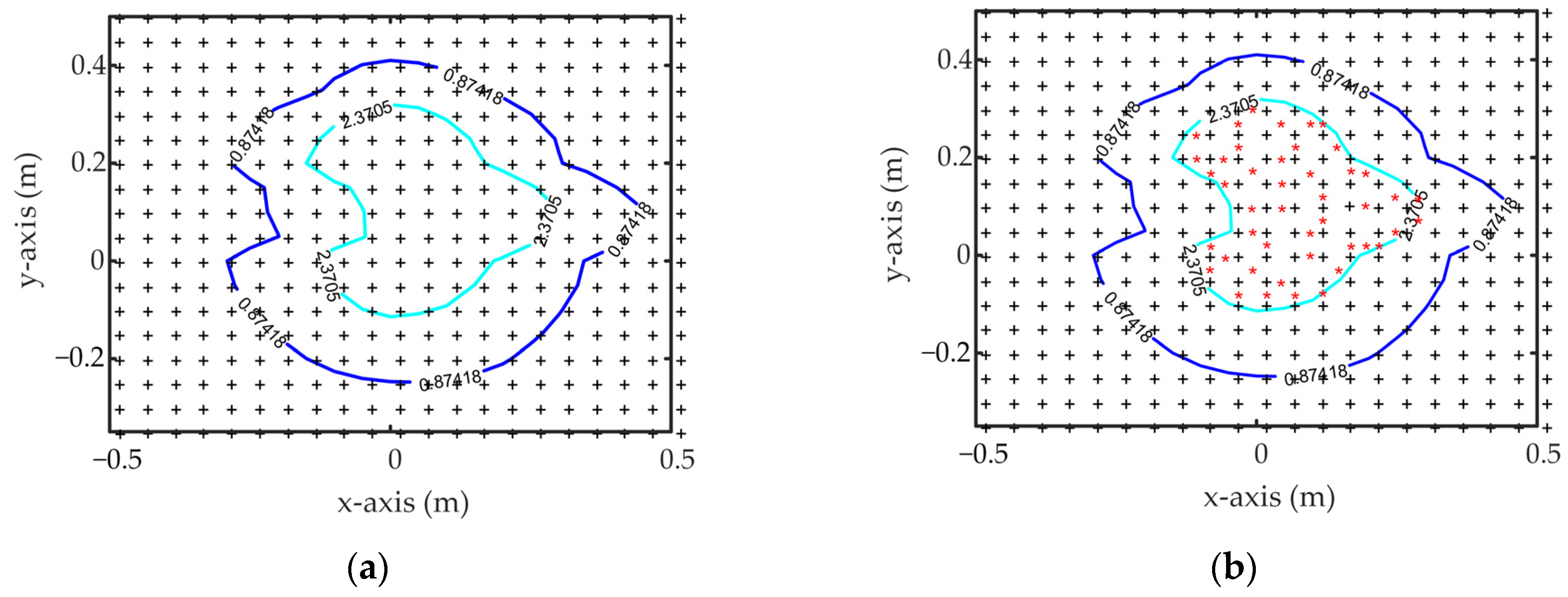
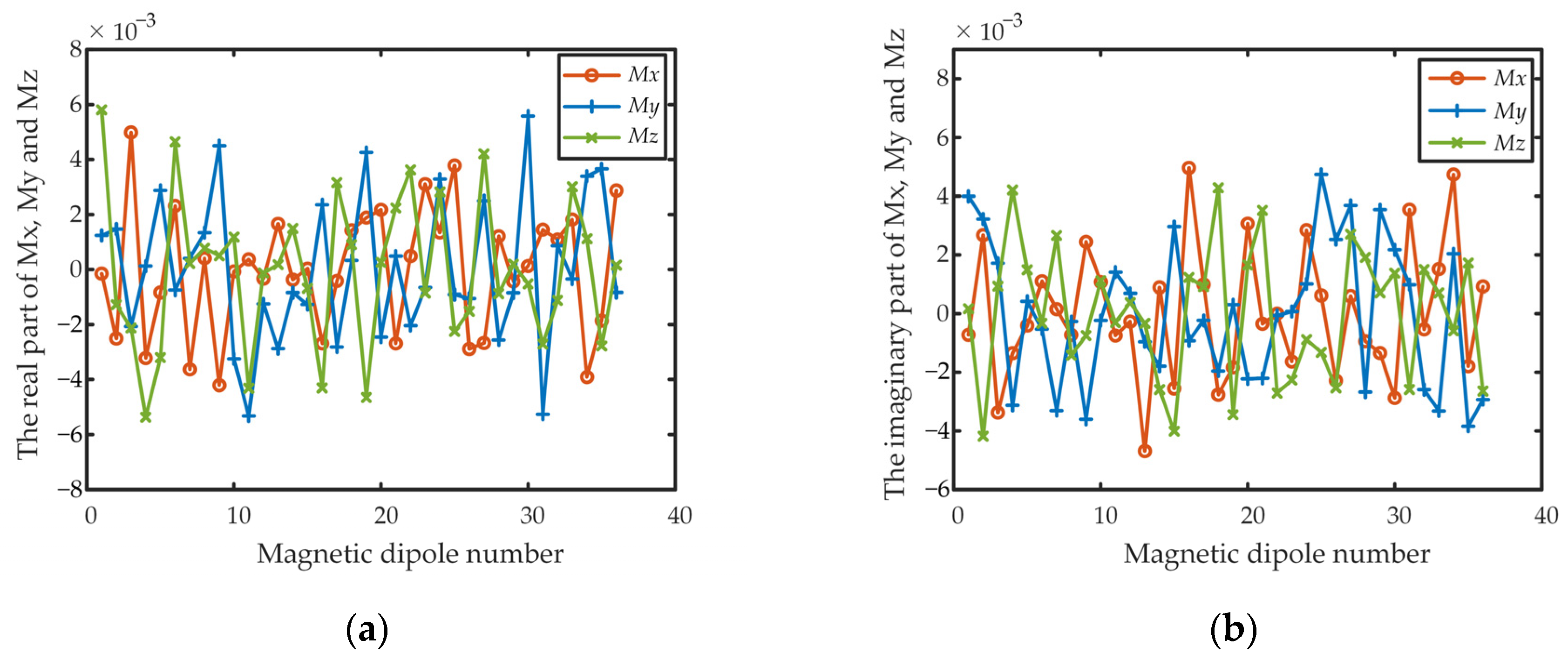
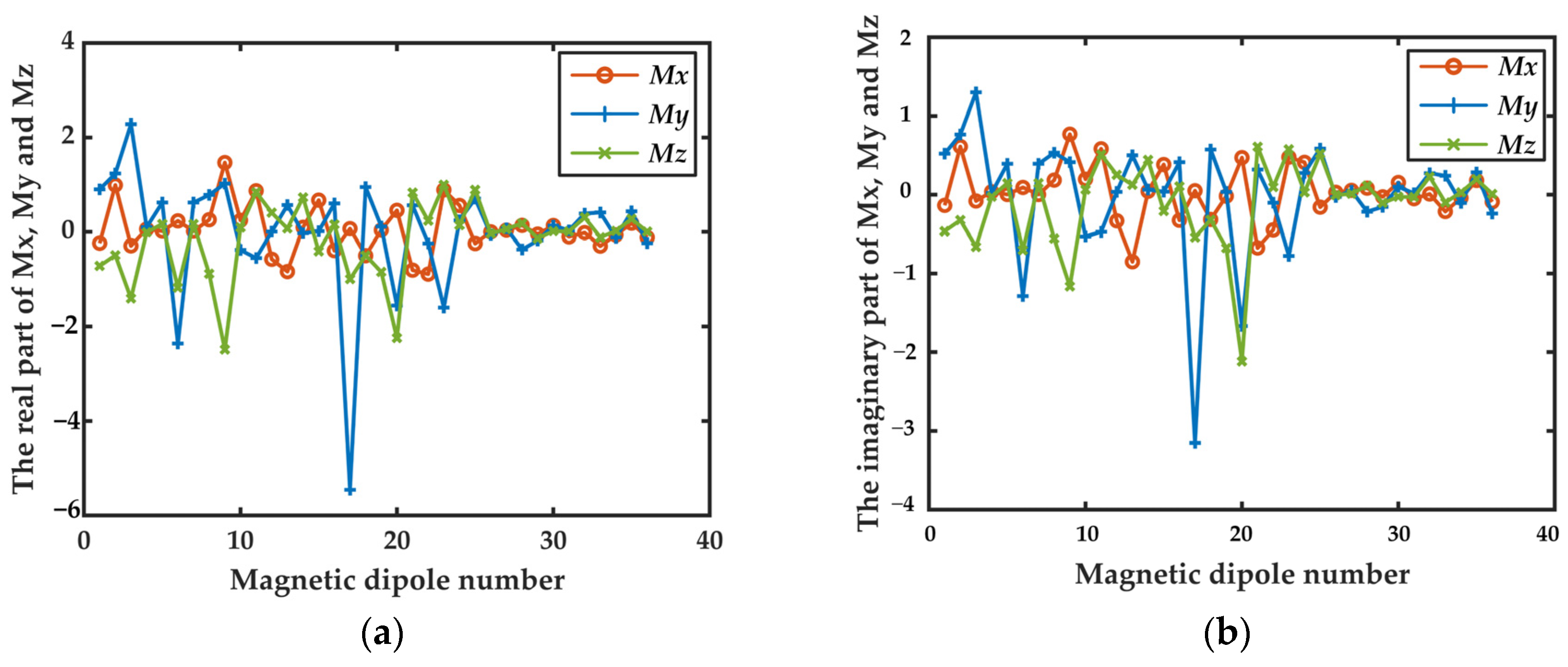
4.2. Simulation Verification
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Gharib, A.; Griffiths, H.D.; Andrews, D.J. Prediction of Topside Electromagnetic Compatibility in Concept-Phase Ship Design. IEEE Trans. Electromagn. Compat. 2017, 59, 67–76. [Google Scholar] [CrossRef]
- Georgiou, C.D.; Kalaitzopoulou, E.; Skipitari, M.; Papadea, P.; Varemmenou, A.; Gavriil, V.; Sarantopoulou, E.; Kollia, Z.; Cefalas, A.-C. Physical Differences between Man-Made and Cosmic Microwave Electromagnetic Radiation and Their Exposure Limits, and Radiofrequencies as Generators of Biotoxic Free Radicals. Radiation 2022, 2, 285–302. [Google Scholar] [CrossRef]
- Zhao, Y.; Baharuddin, M.D.; Smartt, C.; Zhao, X.; Yan, L.P.; Liu, C.J.; Thomas, D.W.P. Measurement of Near-Field Electromagnetic Emissions and Characterization Based on Equivalent Dipole Model in Time-Domain. IEEE Trans. Electromagn. Compat. 2020, 62, 1237–1246. [Google Scholar] [CrossRef]
- Song, T.-H.; Wei, X.-C.; Tang, Z.-Y.; Gao, R.X.-K. Broadband Radiation Source Reconstruction Based on Phaseless Magnetic Near-Field Scanning. IEEE Antennas Wirel. Propag. Lett. 2021, 20, 113–117. [Google Scholar] [CrossRef]
- Yan, Z.W.; Wang, J.W.; Zhang, W.; Wang, Y.S.; Fan, J. A Simple Miniature Ultrawideband Magnetic Field Probe Design for Magnetic Near-Field Measurements. IEEE Trans. Antennas Propag. 2016, 64, 5459–5465. [Google Scholar] [CrossRef]
- Zhang, J.C.; Wei, X.C.; Yang, R.; Gao, R.X.K.; Yang, Y.B. An Efficient Probe Calibration Based Near-Field-to-Near-Field Transformation for EMI Diagnosis. IEEE Trans. Antennas Propag. 2019, 67, 4141–4147. [Google Scholar] [CrossRef]
- Serpaud, S.; Boyer, A.; Dhia, S.B.; Coccetti, F. Efficiency of Sequential Spatial Adaptive Sampling Algorithm to Accelerate Multifrequency Near-Field Scanning Measurement. IEEE Trans. Electromagn. Compat. 2022, 64, 816–826. [Google Scholar] [CrossRef]
- Shao, W.H.; Fang, W.X.; Huang, Y.; Li, G.W.; Wang, L.; He, Z.Y.; Shao, E.; Guo, Y.D.; En, Y.F.; Yao, B. Simultaneous Measurement of Electric and Magnetic Fields with a Dual Probe for Efficient Near-Field Scanning. IEEE Trans. Antennas Propag. 2019, 67, 2859–2864. [Google Scholar] [CrossRef]
- Huangfu, Y.P.; Wang, S.H.; Rienzo, L.D.; Zhu, J.G. Radiated EMI Modeling and Performance Analysis of a PWM PMSM Drive System Based on Field-Circuit Coupled FEM. IEEE Trans. Magn. 2017, 53, 1–4. [Google Scholar] [CrossRef]
- Shinde, S.; Masuda, K.; Shen, G.Y.; Patnaik, A.; Makharashvili, T.; Pommerenke, D.; Khilkevich, V. Radiated EMI Estimation from DC–DC Converters with Attached Cables based on Terminal Equivalent Circuit Modeling. IEEE Trans. Electromagn. Compat. 2018, 60, 1769–1776. [Google Scholar] [CrossRef]
- Zhang, Y.; Lu, J.; Pacheco, J.; Moss, C.D.; Ao, C.O.; Grzegorczyk, T.M.; Kong, J.A. Mode-Expansion Method for Calculating Electromagnetic Waves Scattered by Objects on Rough Ocean Surfaces. IEEE Trans. Antennas Propag. 2005, 53, 1631–1639. [Google Scholar] [CrossRef]
- Solis, D.M.; Martín, V.F.; Araujo, M.G.; Larios, D.; Obelleiro, F.; Taboada, J.M. Accurate EMC Engineering on Realistic Platforms Using an Integral Equation Domain Decomposition Approach. IEEE Trans. Antennas Propag. 2020, 68, 3002–3015. [Google Scholar] [CrossRef]
- Sarkar, T.K.; Taaghol, A. Near-Field to Near/Far-Field Transformation for Arbitrary Near-Field Geometry Utilizing an Equivalent Electric Current and MoM. IEEE Trans. Antennas Propag. 1999, 47, 566–573. [Google Scholar] [CrossRef]
- Baharin, R.H.M.; Omi, S.; Uno, T.; Arima, T. Internal Electric Field Reconstruction and SAR Estimation of In-Body Antenna Using Inverse Equivalent Current Method. IEEE Trans. Electromagn. Compat. 2021, 63, 1658–1666. [Google Scholar] [CrossRef]
- Shu, Y.F.; Wei, X.C.; Fan, J.; Yang, R.; Yang, Y.B. An Equivalent Dipole Model Hybrid with Artificial Neural Network for Electromagnetic Interference Prediction. IRE Trans. Microwave Theory Tech. 2019, 67, 1790–1797. [Google Scholar] [CrossRef]
- Zhang, J.; Pommerenke, D.; Fan, J. Determining Equivalent Dipoles Using a Hybrid Source-Reconstruction Method for Characterizing Emissions from Integrated Circuits. IEEE Trans. Electromagn. Compat. 2017, 59, 567–575. [Google Scholar] [CrossRef]
- Jin, H.H.; Wang, H.; Zhuang, Z.H. A New Simple Method to Design Degaussing Coils Using Magnetic Dipoles. J. Mar. Sci. Eng. 2022, 10, 1495–1512. [Google Scholar] [CrossRef]
- Wen, J.; Ding, L.; Zhang, Y.L.; Wei, X.C. Equivalent Electromagnetic Hybrid Dipole Based on Cascade-Forward Neural Network to Predict Near-Field Magnitude of Complex Environmental Radiation. IEEE J. Multiscale Multiphys. Comput. Techn. 2020, 5, 227–234. [Google Scholar] [CrossRef]
- Zhang, J.; Fan, J. Source Reconstruction for IC Radiated Emissions based on Magnitude-only Near-Field Scanning. IEEE Trans. Electromagn. Compat. 2017, 59, 557–566. [Google Scholar] [CrossRef]
- Shu, Y.F.; Wei, X.C.; Yang, R.; Liu, E.X. An Iterative Approach for EMI Source Reconstruction Based on Phaseless and Single-Plane Near-Field Scanning. IEEE Trans. Electromagn. Compat. 2018, 60, 937–944. [Google Scholar] [CrossRef]
- Sørensen, M.; Franek, O.; Pedersen, G.F.; Radchenko, A.; Kam, K.; Pommerenke, D. Estimate on the Uncertainty of Predicting Radiated Emission from Near-Field Scan Caused by Insufficient or Inaccurate Near-Field Data: Evaluation of the Needed Step Size, Phase Accuracy and the Need for All Surfaces in the Huygens’ Box. In Proceedings of the International Symposium on Electromagnetic Compatibility-EMC EUROPE, Rome, Italy, 17–21 September 2012; pp. 1–6. [Google Scholar]
- Wilson, P. On Correlating TEM Cell and OATS Emission Measurements. IEEE Trans. Electromagn. Compat. 1995, 37, 1–16. [Google Scholar] [CrossRef]
- Obiekezie, C.K.; Thomas, D.W.P.; Nothofer, A.; Greedy, S.; Arnaut, L.R.; Sewell, P. Complex Locations of Equivalent Dipoles for Improved Characterization of Radiated Emissions. IEEE Trans. Electromagn. Compat. 2014, 56, 1087–1094. [Google Scholar] [CrossRef]
- Wang, B.F.; Liu, X.A.; Zhao, W.J.; Png, C.E. Reconstruction of Equivalent Emission Sources for PCBs from Near-Field Scanning Using a Differential Evolution Algorithm. IEEE Trans. Electromagn. Compat. 2018, 60, 1670–1677. [Google Scholar] [CrossRef]
- Storn, R.; Price, K. Differential Evolution-A Simple and Efficient Heuristic for Global Optimization over Continuous Spaces. J. Glob. Optimt. 1997, 11, 341–359. [Google Scholar] [CrossRef]
- Xu, P. Iterative Generalized Cross-Validation for Fusing Heteroscedastic Data of Inverse Ill-Posed Problems. Geophys. J. Int. 2009, 179, 182–200. [Google Scholar] [CrossRef] [Green Version]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Magnetic-Field Component | Hx | Hy | Hz | H |
|---|---|---|---|---|
| Relative error of amplitude | 22.88% | 23.74% | 23.86% | 23.11% |
| Magnetic-Field Component | Hx | Hy | Hz | H |
|---|---|---|---|---|
| Relative error of amplitude | 23.75% | 25.18% | 25.27% | 24.34% |
| Magnetic-Field Component | Hx | Hy | Hz | H |
|---|---|---|---|---|
| Relative error of amplitude | 1.44% | 2.62% | 2.14% | 1.52% |
| Relative error of phase | 17.36% | 21.26% | 14.29% | 10.64% |
| Magnetic-Field Component | Hx | Hy | Hz | H |
|---|---|---|---|---|
| Relative error of amplitude | 1.99% | 3.63% | 3.47% | 2.02% |
| Relative error of phase | 16.24% | 18.33% | 15.23% | 9.77% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, H.; Liu, Q.; Li, Y.; Huang, C.; Zhang, H.; Xu, Y. Research on the Method of Near-Field Measurement and Modeling of Powerful Electromagnetic Equipment Radiation Based on Field Distribution Characteristics. Energies 2023, 16, 2005. https://doi.org/10.3390/en16042005
Chen H, Liu Q, Li Y, Huang C, Zhang H, Xu Y. Research on the Method of Near-Field Measurement and Modeling of Powerful Electromagnetic Equipment Radiation Based on Field Distribution Characteristics. Energies. 2023; 16(4):2005. https://doi.org/10.3390/en16042005
Chicago/Turabian StyleChen, Hao, Qifeng Liu, Yongming Li, Chen Huang, Huaiqing Zhang, and Yinxiang Xu. 2023. "Research on the Method of Near-Field Measurement and Modeling of Powerful Electromagnetic Equipment Radiation Based on Field Distribution Characteristics" Energies 16, no. 4: 2005. https://doi.org/10.3390/en16042005