





Control Strategies of Electric Vehicles Participating in Ancillary Services: A Comprehensive Review

Abstract
:1. Introduction
2. Methods
3. Control and Optimization Strategies
3.1. Control Strategies
3.2. Optimization Algorithm
4. Literature Review
4.1. Frequency Regulation Service
4.2. Frequency Contingency Service
4.2.1. PID Variants
4.2.2. Fuzzy Variants
4.2.3. MPC Variants
4.2.4. Other Variants
4.3. Inertia Service
4.4. Voltage Regulation
5. Discussion and Future Research Directions
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| 2DOF | Two-degree-of-freedom |
| ABCO | Artificial bee colony optimization |
| ACA | Average consensus algorithm |
| ADC | Autonomous distributed control |
| ADE | Adaptive differential evolution |
| ADRC | Active disturbance rejection control |
| AEFA | Artificial electric field algorithm |
| AHA | Artificial hummingbird algorithm |
| AIMPC | Adaptive intelligent model-predictive control |
| AMFR | Asynchronous method frequency regulation |
| ASMC | Adaptive sliding mode control |
| ASO | Atom search optimization |
| BHA | Black hole algorithm |
| BSH | Battery SoC holders |
| CARIMA | Controlled autoregressive and integrated moving average |
| CC | Cascaded control |
| CCA | Coordinated control algorithm |
| COVC | Co-optimal V2G control |
| CPA | Consensus priority algorithm |
| CPN | Coloured Petri net-based |
| DCC | Distributed cooperative control |
| DE | Differential evolution |
| DEPSO | Differential evolution particle swarm optimization |
| DFO | Distributed functional observer |
| DPFRC | Decentralized primary frequency regulation control |
| DVC | Distributed V2G control |
| DVR | Dynamic voltage restorer |
| EFRAM | Enhanced frequency responsive aggregate model |
| EHO | Elephant herding optimization |
| EO | Equilibrium optimizer |
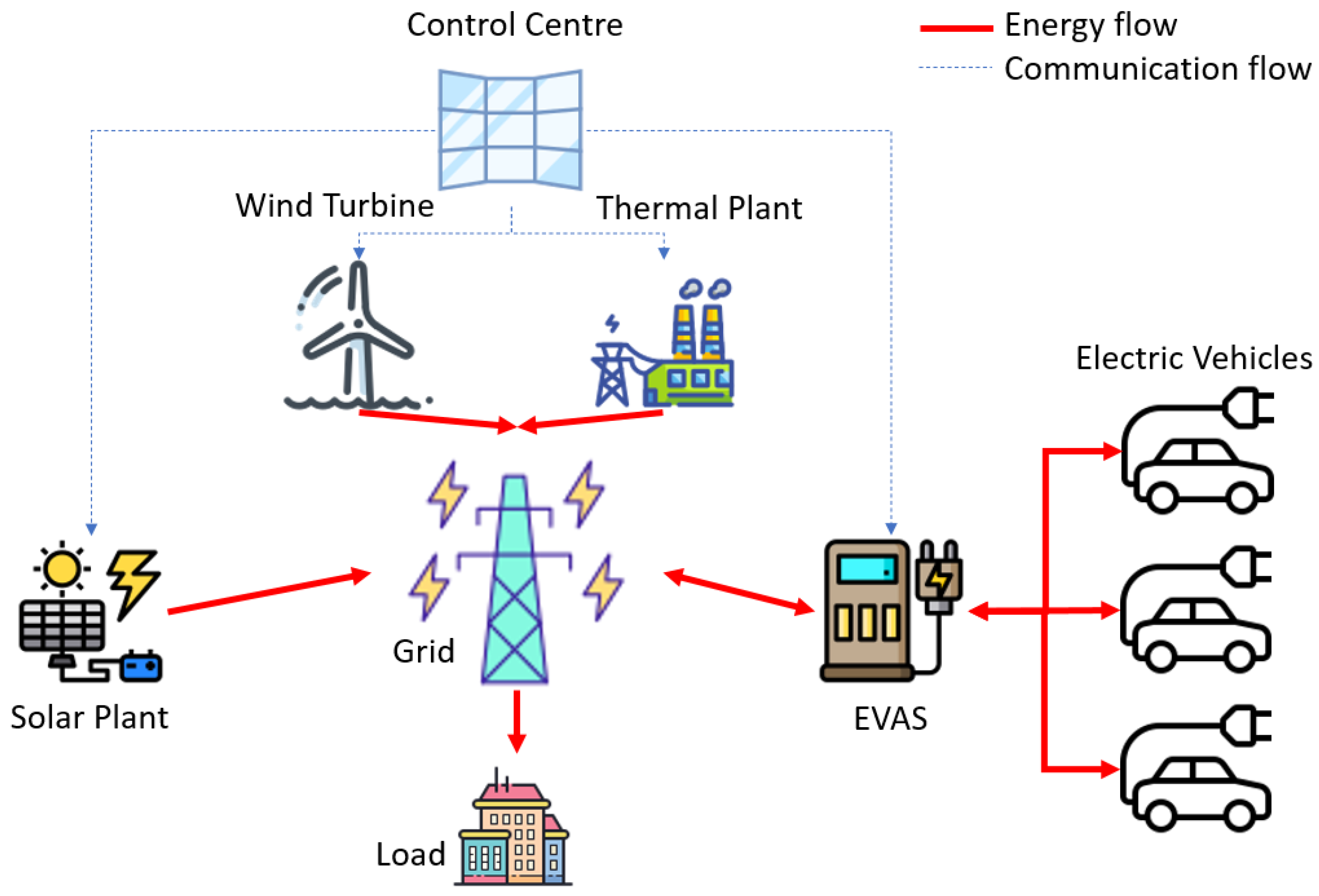
| EVAS | Electric vehicle as an ancillary service |
| FGD | Fractional gradient descent |
| FLC | Fuzzy logic controller |
| FMC | Frequency modulation control |
| FO-PID | Fractional order PID |
| FPA | Flower pollination algorithm |
| FPID | Fuzzy PID |
| FRC | Frequency regulation capacity |
| FRSM | Frequency regulation with SoC management |
| GA | Genetic algorithm |
| GPC | Generalized predictive controller |
| GrADP | Goal representation adaptive dynamic programming |
| GSC | Grouping strategy control |
| GWO | Grey wolf optimization |
| HC-DV2G | Hierarchical centralized–decentralized V2G |
| HHO | Harris’s hawks optimization |
| HIL | Hardware-in-the-loop |
| HSA | Harmony search algorithm |
| ICA | Imperialist competitive algorithm |
| IT2 | Interval type-2 |
| JA | Jaya algorithm |
| LMI | Linear matrix inequality |
| LQR | Linear–quadratic regulator |
| LRO | Luenberger reduced-order observer |
| MAS | Multiagent system |
| MBA | Mine blast algorithm |
| MBOA | Magnetotactic bacteria optimization algorithm |
| MFNL | Model-free nonlinear |
| MGPC | Multivariable generalized predictive control |
| MMPC | Multiple model-predictive controller |
| MO | Multiobjective |
| MPA | Marine predator algorithm |
| MVO | Multiverse optimizer |
| NSGA-II | Nondominated sorting genetic algorithm ii |
| OD | Optimal dispatch |
| ODC | Overall droop controllers |
| OISM | An observer-based integral sliding mode |
| PI-DC | Power-imbalance-based droop control |
| PSO | Particle swarm optimization |
| QO | Quasi-opposition |
| QP | Quadratic programming |
| RAS | Region of asymptotical stability |
| RL | Reinforcement learning |
| RMPC | Robust model-predictive control |
| RO | Rolling optimization |
| SCA | Sine cosine algorithm |
| SDV2G | Smart decentralized V2G |
| SFMS | Smart fleet management strategy |
| SLC | Simple linear control |
| SMC | Sliding mode control |
| SOA | Seagull optimization algorithm |
| SOF | Static output feedback |
| SSA | Nondominated sorting genetic algorithm ii |
| SUIO | Stochastic unknown input observer |
| TI/D | Tilt integral/derivative |
| TLBO | Teaching–learning-based optimization |
| UVF | Unification of the voltage–frequency |
| VPLA | Volleyball premier league algorithm |
| WCA | Water cycle algorithm |
| WDO | Wind-driven optimization |
| WOA | Whale optimization algorithm |
References
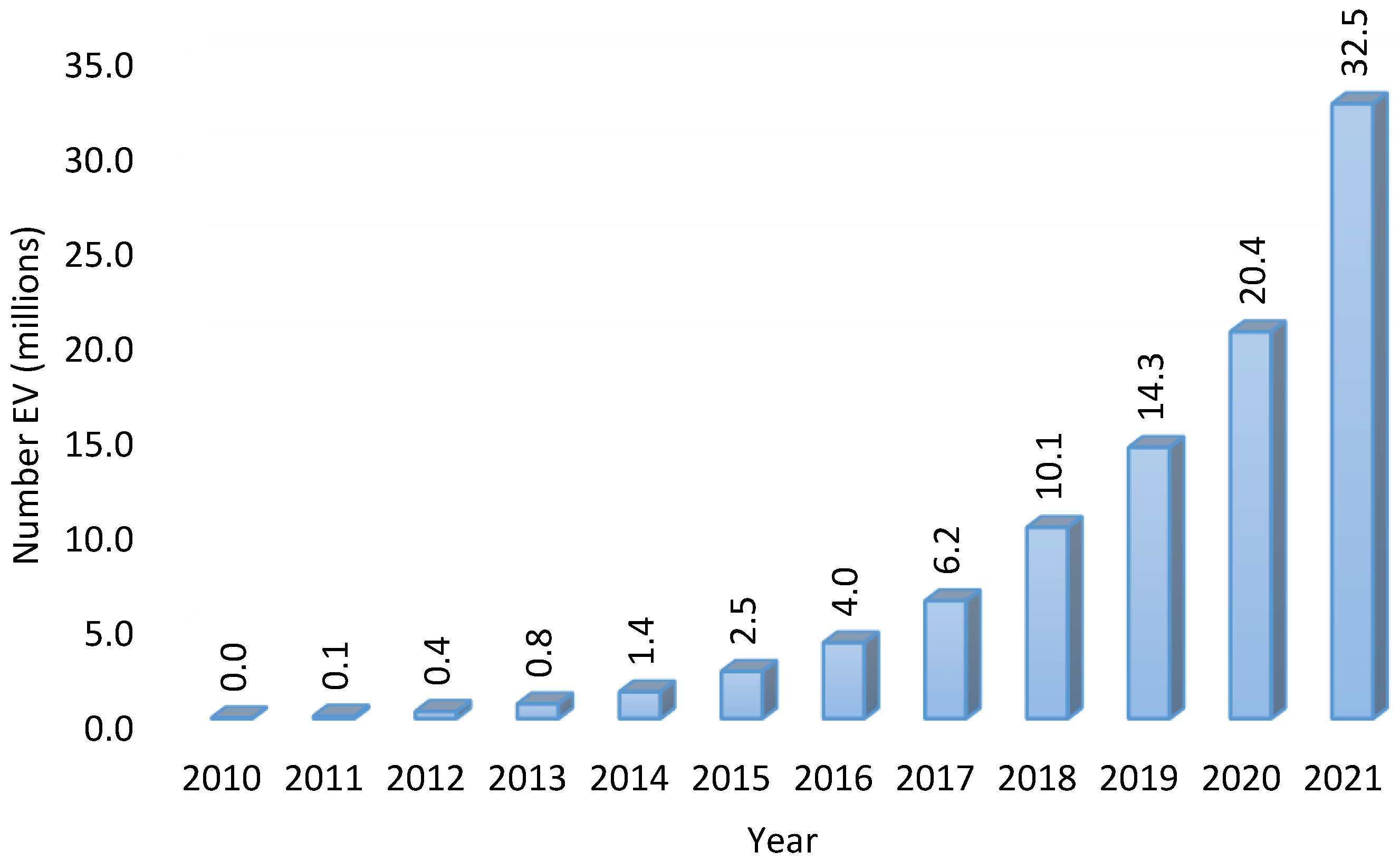
- International Energy Agency (IEA). Global EV Outlook 2022—Securing Supplies for an Electric Future; International Energy Agency (IEA): Paris, France, 2022. [Google Scholar]
- Queensland Government. Economic Development Queensland Electric Vehicle (EV) Charging Infrastructure PRACTICE NOTE; no. November. 2018. Available online: www.dsdmip.qld.gov.au (accessed on 26 September 2022).
- Kempton, W.; Tomic, J.; Letendre, S. UC Davis Recent Work Title Vehicle-to-Grid Power: Battery, Hybrid, and Fuel Cell Vehicles as Resources for Distributed Electric Power in California; University of California: San Diego, CA, USA, 2001. [Google Scholar]
- Everoze. EVConsult. In V2G Global Roadtrip: Around the World in 50 Projects. Lessons Learned from Fifty International Vehicle-to-Grid Projects; Everoze: Bristol, UK, 2018. [Google Scholar]
- Hirst, E.; Kirby, B. Electric-Power Ancillary Services. Proc. Am. Power Conf. 1996, 1, 529–534. [Google Scholar] [CrossRef]
- Kumar, G.V.B.; Palanisamy, K. A Review of Energy Storage Participation for Ancillary Services in a Microgrid Environment. Inventions 2020, 5, 1–39. [Google Scholar] [CrossRef]
- Australian Energy Regulator. Contingency Frequency Control Ancillary Services (FCAS) Compliance Bulletin; Australian Energy Regulator: Melbourne, Australia, 2022. [Google Scholar]
- AEMO. Guide to Ancillary Services in the National Energy Market; AEMO: Melbourne, Australia, 2021. [Google Scholar]
- Australian Energy Market Operator (AEMO). Guide to Ancillary Services in the National; AEMO: Melbourne, Australia, 2015. [Google Scholar]
- AEMO. Ancillary Services Report for the Important Notice; AEMO: Melbourne, Australia, 2019. [Google Scholar]
- Holmberg, D.; Omar, F. Characterization of Residential Distributed Energy Resource Potential to Provide Ancillary Services; NIST Special Publication: Gaithersburg, MD, USA, 2018. [Google Scholar] [CrossRef]
- Aguilar-Dominguez, D.; Ejeh, J.; Brown, S.F.; Dunbar, A.D.F. Exploring the Possibility to Provide Black Start Services by Using Vehicle-to-Grid. Energy Rep. 2022, 8, 74–82. [Google Scholar] [CrossRef]
- Koohi-Kamali, S.; Tyagi, V.V.; Rahim, N.A.; Panwar, N.L.; Mokhlis, H. Emergence of Energy Storage Technologies as the Solution for Reliable Operation of Smart Power Systems: A Review. Renew. Sustain. Energy Rev. 2013, 25, 135–165. [Google Scholar] [CrossRef]
- Galus, M.D.; Vayá, M.G.; Krause, T.; Andersson, G. The Role of Electric Vehicles in Smart Grids. Wiley Interdiscip. Rev. Energy Environ. 2013, 2, 384–400. [Google Scholar] [CrossRef]
- Hosseini, S.S.; Badri, A.; Parvania, M. A Survey on Mobile Energy Storage Systems (MESS): Applications, Challenges and Solutions. Renew. Sustain. Energy Rev. 2014, 40, 161–170. [Google Scholar] [CrossRef]
- Habib, S.; Kamran, M.; Rashid, U. Impact Analysis of Vehicle-to-Grid Technology and Charging Strategies of Electric Vehicles on Distribution Networks—A Review. J. Power Sources 2015, 277, 205–214. [Google Scholar] [CrossRef]
- Gonzalez-Romera, E.; Barrero-Gonzalez, F.; Romero-Cadaval, E.; Milanes-Montero, M.I. Overview of Plug-in Electric Vehicles as Providers of Ancillary Services. In Proceedings of the 2015 9th International Conference on Compatibility and Power Electronics, CPE 2015, Costa da Caparica, Portugal, 24–26 June 2015; pp. 516–521. [Google Scholar]
- Iqbal, S.; Xin, A.; Jan, M.U.; Rehman, H.; Masood, A.; Asad, S.; Rizvi, A. Frequency Control in a Microgrid—A Review. In Proceedings of the 2018 IEEE 2nd International Electrical and Energy Conference, Beijing, China, 4–6 November 2018; Volume 2018, pp. 563–568. [Google Scholar]
- Solanke, T.U.; Ramachandaramurthy, V.K.; Yong, J.Y.; Pasupuleti, J.; Kasinathan, P.; Rajagopalan, A. A Review of Strategic Charging–Discharging Control of Grid-Connected Electric Vehicles. J. Energy Storage 2020, 28, 2019. [Google Scholar] [CrossRef]
- Metwly, M.Y.; Hamad, M.S.; Abdel-Khalik, A.S.; Eldesouki, H. A Review of Power Management Strategies for Grid Frequency Regulation Using Electric Vehicles. In Proceedings of the 22nd International Middle East Power Systems Conference (MEPCON), Assiut, Egypt, 14–16 December 2021; Volume 22, pp. 541–547. [Google Scholar] [CrossRef]
- El-Bayeh, C.Z.; Alzaareer, K.; Aldaoudeyeh, A.M.I.; Brahmi, B.; Zellagui, M. Charging and Discharging Strategies of Electric Vehicles: A Survey. World Electr. Veh. J. 2021, 12, 11. [Google Scholar] [CrossRef]
- Chong, S.W.; Lin, T.J.; Chen, Y. A methodological review of systematic literature reviews in higher education: Heterogeneity and homogeneity. Educ. Res. Rev. 2022, 35, 100426. [Google Scholar] [CrossRef]
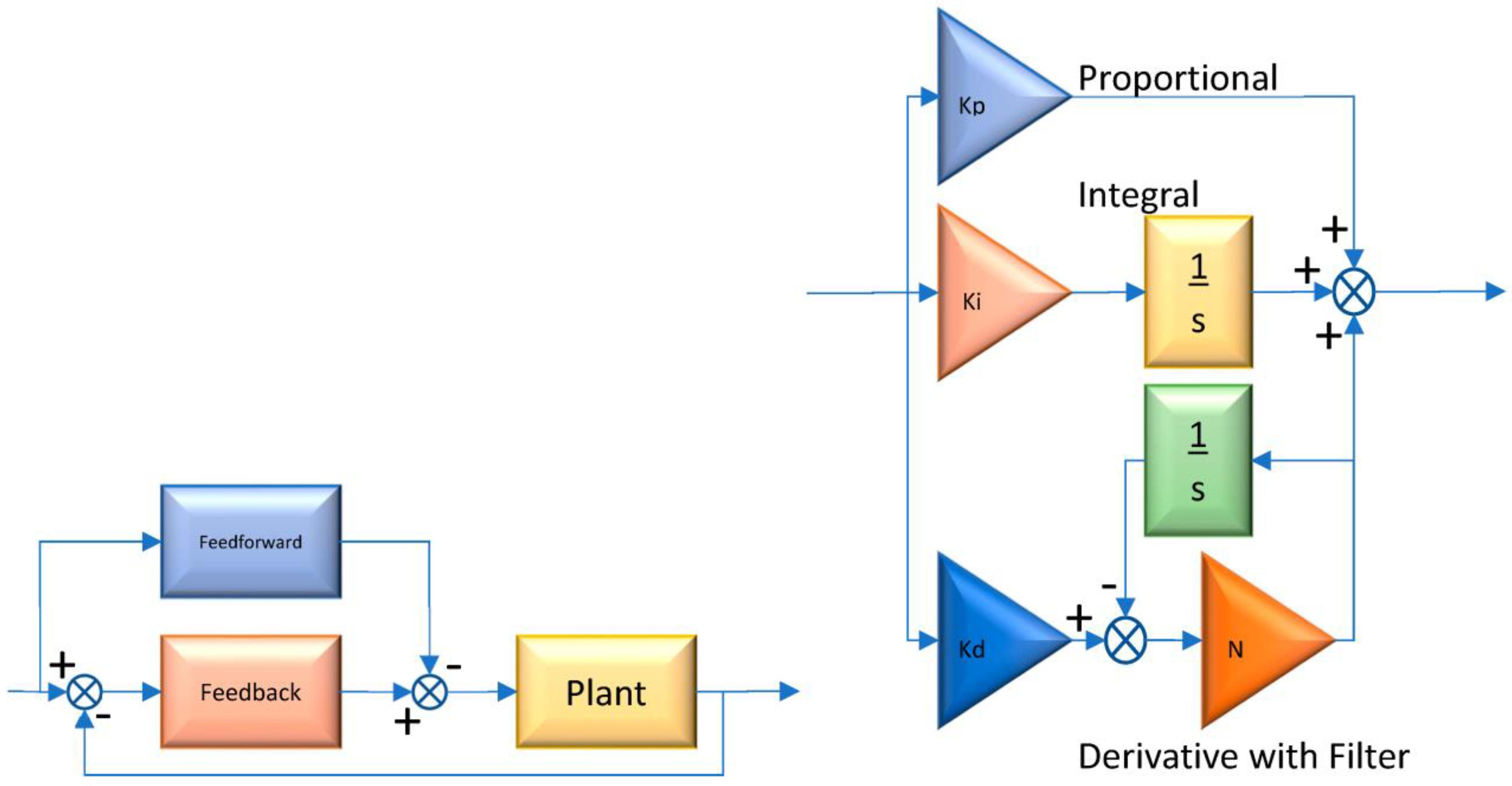
- Bennett, S. The Past of PID Controllers. IFAC Proc. Vol. 2000, 33, 1–11. [Google Scholar] [CrossRef]
- Sandhya, A.; Sandhya, R.; Prameela, M. An Overview of Fractional Order PID Controllers and Its Industrial Applications. Int. J. Innov. Eng. Technol. 2016, 6, 534–546. [Google Scholar]
- Seraji, H.; Jamshidi, M.; Kim, Y.T.; Shahinpoor, M. Linear Multivariable Control of Two-link Robots. J. Robot. Syst. 1986, 3, 349–365. [Google Scholar] [CrossRef]
- Taguchi, H.; Araki, M. Two-Degree-of-Freedom PID Controllers—Their Functions and Optimal Tuning. IFAC Proc. Vol. 2000, 33, 91–96. [Google Scholar] [CrossRef]
- Hać, A. Suspension Optimization of a 2-DOF Vehicle Model Using a Stochastic Optimal Control Technique. J. Sound Vib. 1985, 100, 343–357. [Google Scholar] [CrossRef]
- Visioli, A. Practical PID Control, 1st ed.; Springer: London, UK, 2006. [Google Scholar]
- Liu, T.; Gao, F. Industrial Process Identification and Control Design; Springer: Berlin/Heidelberg, Germany, 2012; Volume 4, ISBN 978-0-85729-976-5. [Google Scholar]
- Åström, K.J. Control System Design Lecture Notes for ME 155A; Department of Mechanical & Environmental, Engineering, University of California: Santa Barbara, CA, USA, 2002; Volume 333. [Google Scholar]
- Reznik, L. Fuzzy Controller Design: Recommendations to the User. In Proceedings of the 1998 Second International Conference. Knowledge-Based Intelligent Electronic Systems, Proceedings KES’98, Adelaide, South Australia, 21–23 April 1998; Volume 3, pp. 609–616. [Google Scholar] [CrossRef]
- Van Nauta Lemke, H.R.; De-Zhao, W. Fuzzy Pid Supervisor. Proc. IEEE Conf. Decis. Control 1985, 602–608. [Google Scholar] [CrossRef]
- Banerjee, T.P.; Das, S. Intelligent Fault Tracking by an Adaptive Fuzzy Predictor and a Fractional Controller of Electromechanical System—A Hybrid Approach. In Proceeedings of the Swarm, Evolutionary, and Memetic Computing: 4th International Conference, SEMCCO 2013; Chennai, India, 19–21 December 2013, Proceedings, Part II 4; Springer: Berlin/Heidelberg, Germany, 2013; pp. 574–582. [Google Scholar] [CrossRef]
- Efe, M.Ö. Fractional Fuzzy Adaptive Sliding-Mode Control of a 2-DOF Direct-Drive Robot Arm. IEEE Trans. Syst. Man Cybern. Part B Cybern. 2008, 38, 1561–1570. [Google Scholar] [CrossRef] [PubMed]
- Liang, Q.; Mendel, J.M. Interval Type-2 Fuzzy Logic Systems: Theory and Design. IEEE Trans. Fuzzy Syst. 2000, 8, 535–550. [Google Scholar] [CrossRef]
- Morari, M.; Lee, J.H. Model Predictive Control: Past, Present and Future. Comput. Chem. Eng. 1999, 23, 667–682. [Google Scholar] [CrossRef]
- Safonov, M.G. Origins of Robust Control: Early History and Future Speculations. IFAC Proc. Vol. 2012, 7, 1–8. [Google Scholar] [CrossRef]
- Toscano, R. Signal and System Norms. In Advances in Industrial Control; Springer: Berlin/Heidelberg, Germany, 2013; pp. 25–44. [Google Scholar]
- Shtessel, Y.; Edwards, C.; Fridman, L.; Levant, A. Sliding Mode Control and Observation; Springer: New York, NY, USA, 2014; ISBN 978-0-81764-893-0. [Google Scholar]
- Sabanovic, A.; Izosimov, D.B. Application of Sliding Modes to Induction Motor Control. IEEE Trans. Ind. Appl. 1981, IA-17, 41–49. [Google Scholar] [CrossRef]
- Annaswamy, A.M.; Fradkov, A.L. A Historical Perspective of Adaptive Control and Learning. Annu. Rev. Control 2021, 52, 18–41. [Google Scholar] [CrossRef]
- Sussmann, H.J.; Willems, J.C. 300 Years of Optimal Control: From the Brachystochrone to the Maximum Principle. IEEE Control Syst. 1997, 17, 32–44. [Google Scholar] [CrossRef]
- Pesch, H.-J.; Plail, M. The Cold War and the Maximum Principle of Optimal Control. Doc. Math. 2012, 1, 331–343. [Google Scholar]
- Huang, H.P.; Chao, Y.C. Optimal Tuning of a Practical Digital Pid Controller. Chem. Eng. Commun. 1982, 18, 51–61. [Google Scholar] [CrossRef]
- Karaboga, D.; Basturk, B. A Powerful and Efficient Algorithm for Numerical Function Optimization: Artificial Bee Colony (ABC) Algorithm. J. Glob. Optim. 2007, 39, 459–471. [Google Scholar] [CrossRef]
- Hashim, M.R.; Hyreil, A.K.; Tokhi, M.O. Optimal Tuning of PD Controllers Using Modified Artificial Bee Colony Algorithm. J. Telecommun. Electron. Comput. Eng. 2018, 10, 67–70. [Google Scholar]
- Anita; Yadav, A. AEFA: Artificial Electric Field Algorithm for Global Optimization. Swarm Evol. Comput. 2019, 48, 93–108. [Google Scholar] [CrossRef]
- Naga Sai Kalyan, C.H.; Sambasiva Rao, G. Frequency and Voltage Stabilisation in Combined Load Frequency Control and Automatic Voltage Regulation of Multiarea System with Hybrid Generation Utilities by AC/DC Links. Int. J. Sustain. Energy 2020, 39, 1009–1029. [Google Scholar] [CrossRef]
- Jang, J.R. ANFIS: Adaptive-Network-Based Fuzzy Inference System. IEEE Trans. Syst. Man Cybern. 1993, 23, 665–685. [Google Scholar] [CrossRef]
- Kukolj, D.; Kulic, F.; Levi, E. Artificial Intelligence Based Gain Scheduling of PI Speed Controller in DC Motor Drives. IEEE Int. Symp. Ind. Electron. 1999, 1, 425–429. [Google Scholar] [CrossRef]
- Macukow, B. Neural Networks—State of Art, Brief History, Basic Models and Architecture. In Proceedings of the Computer Information Systems and Industrial Management, 15th IFIP TC8 International Conference, CISIM 2016, Vilnius, Lithuania, 14–16 September 2016; Proceedings 15. Springer: Berlin/Heidelberg, Germany, 2016; pp. 3–14. [Google Scholar]
- Narendra, K.S.; Parthasarathy, K. Identification and Control of Dynamical Systems Using Neural Networks. IEEE Trans. Neural Networks 1990, 1, 4–27. [Google Scholar] [CrossRef]
- Puttaswamy, P. Literature Review of Applications of Neural Network in Control Systems. Int. J. Sci. Res. Publ. 2013, 3, 2250–3153. [Google Scholar]
- Hatamlou, A. Black Hole: A New Heuristic Optimization Approach for Data Clustering. Inf. Sci. 2013, 222, 175–184. [Google Scholar] [CrossRef]
- Khooban, M.-H. Secondary Load Frequency Control of Time-Delay Stand-Alone Microgrids With Electric Vehicles. IEEE Trans. Ind. Electron. 2018, 65, 7416–7422. [Google Scholar] [CrossRef]
- Storn, R.; Price, K. Differential Evolution—A Simple and Efficient Heuristic for Global Optimization over Continuous Spaces. J. Glob. Optim. 1997, 11, 341–359. [Google Scholar] [CrossRef]
- Liu, J.; Lampinen, J. A Fuzzy Adaptive Differential Evolution Algorithm. Soft Comput. 2005, 9, 448–462. [Google Scholar] [CrossRef]
- Cheng, S.L.; Hwang, C. Designing PID Controllers with a Minimum IAE Criterion by a Differential Evolution Algorithm. Chem. Eng. Commun. 1998, 170, 83–115. [Google Scholar] [CrossRef]
- Zhao, W.; Wang, L.; Mirjalili, S. Artificial Hummingbird Algorithm: A New Bio-Inspired Optimizer with Its Engineering Applications. Comput. Methods Appl. Mech. Eng. 2022, 388, 114194. [Google Scholar] [CrossRef]
- Zhao, W.; Wang, L.; Zhang, Z. Atom Search Optimization and Its Application to Solve a Hydrogeologic Parameter Estimation Problem. Knowl. Based Syst. 2019, 163, 283–304. [Google Scholar] [CrossRef]
- Hekimoglu, B. Optimal Tuning of Fractional Order PID Controller for DC Motor Speed Control via Chaotic Atom Search Optimization Algorithm. IEEE Access 2019, 7, 38100–38114. [Google Scholar] [CrossRef]
- Zhang, W.J.; Xie, X.F. DEPSO: Hybrid Particle Swarm with Differential Evolution Operator. In Proceedings of the 2003 IEEE International Conference on Systems, Man and Cybernetics, Washington, DC, USA, 8 October 2003; Volume 4, pp. 3816–3821. [Google Scholar] [CrossRef]
- Pati, T.K.; Sahu, B.K. Application of hybrid DEPSO algorithm to study the performance of different PID controller structures for automatic generation control of a two-area multi-units interconnected power system. In Proceedings of the 2014 International Conference on Circuits, Power and Computing Technologies [ICCPCT-2014], Nagercoil, India, 20–21 March 2014; pp. 787–791. [Google Scholar]
- Wang, G.G.; Deb, S.; Coelho, L.D.S. Elephant Herding Optimization. In Proceedings of the 2015 3rd International Symposium on Computational and Business Intelligence (ISCBI), Bali, Indonesia, 7–9 December 2015; pp. 1–5. [Google Scholar] [CrossRef]
- Sambariya, D.K.; Fagna, R. A Novel Elephant Herding Optimization Based PID Controller Design for Load Frequency Control in Power System. In Proceedings of the 2017 International Conference on Computer, Communications and Electronics (Comptelix), Jaipur, India, 1–2 July 2017; pp. 595–600. [Google Scholar] [CrossRef]
- Yang, X.S. Firefly Algorithms for Multimodal Optimization. In Proceedings of the Stochastic Algorithms: Foundations and Applications, 5th International Symposium, SAGA 2009, Sapporo, Japan, 26–28 October 2009; Proceedings 5. Springer: Berlin/Heidelberg, Germany, 2009. 5792 LNCS. pp. 169–178. [Google Scholar] [CrossRef]
- Farook, S.; Sangameswara Raju, P. Regulation of Ancillary Services with Integrated GAS Power Plant in a Hydro-Thermal Deretulated Power System. In Proceedings of the 2012 International Conference on Advances in Power Conversion and Energy Technologies (APCET), Mylavaram, India, 2–4 August 2012. [Google Scholar] [CrossRef]
- Yang, X.S. Flower Pollination Algorithm for Global Optimization. In Proceedings of the Unconventional Computation and Natural Computation, 11th International Conference, UCNC 2012, Orléan, France, 3–7 September 2012; Proceedings 11. Springer: Berlin/Heidelberg, Germany, 2012. 7445 LNCS. pp. 240–249. [Google Scholar] [CrossRef]
- Abdelaziz, A.Y.; Ali, E.S. Static VAR Compensator Damping Controller Design Based on Flower Pollination Algorithm for a Multi-Machine Power System. Electr. Power Compon. Syst. 2015, 43, 1268–1277. [Google Scholar] [CrossRef]
- Dianati, M.; Song, I.; Treiber, M. An Introduction to Genetic Algorithms and Evolution Strategies. Sadhana 2002, 24, 293–315. [Google Scholar]
- Alam, T.; Qamar, S.; Dixit, A.; Benaida, M. Genetic Algorithm: Reviews, Implementations and Applications. Int. J. Eng. Pedagog. 2021, 10, 57–77. [Google Scholar] [CrossRef]
- Karr, C.L.; Freeman, L.M.; Meredith, D.L. Improved Fuzzy Process Control of Spacecraft Autonomous Rendezvous Using a Genetic Algorithm. Intell. Control Adapt. Syst. 1990, 1196, 274. [Google Scholar] [CrossRef]
- Mirjalili, S.; Mirjalili, S.M.; Lewis, A. Grey Wolf Optimizer. Adv. Eng. Softw. 2014, 69, 46–61. [Google Scholar] [CrossRef]
- Mohamed, A.A.A.; El-Gaafary, A.A.M.; Mohamed, Y.S.; Hemeida, A.M. Design Static VAR Compensator Controller Using Artificial Neural Network Optimized by Modify Grey Wolf Optimization. In Proceedings of the 2015 International Joint Conference on Neural Networks (IJCNN), Killarney, Ireland, 12–17 July 2015. [Google Scholar] [CrossRef]
- Geem, Z.W.; Kim, J.H.; Loganathan, G.V. A New Heuristic Optimization Algorithm: Harmony Search. SAGE 2001, 76, 60–68. [Google Scholar] [CrossRef]
- Baghaee, H.R.; Mirsalim, M.; Sanjari, M.J.; Gharehpetian, G.B. Power Control Strategy of Parallel Inverter Interfaced DG Units. In Proceedings of the 2008 13th International Power Electronics and Motion Control Conference, Poznan, Poland, 1–3 September 2008; Volume 3, pp. 629–636. [Google Scholar] [CrossRef]
- Heidari, A.A.; Mirjalili, S.; Faris, H.; Aljarah, I.; Mafarja, M.; Chen, H. Harris Hawks Optimization: Algorithm and Applications. Futur. Gener. Comput. Syst. 2019, 97, 849–872. [Google Scholar] [CrossRef]
- Ekinci, S.; Hekimoglu, B.; Demiroren, A.; Kaya, S. Harris Hawks Optimization Approach for Tuning of Fopid Controller in DC-DC Buck Converter. In Proceedings of the 2019 International Artificial Intelligence and Data Processing Symposium (IDAP), Malatya, Turkey, 21–22 September 2019. [Google Scholar] [CrossRef]
- Atashpaz-Gargari, E.; Lucas, C. Imperialist Competitive Algorithm: An Algorithm for Optimization Inspired by Imperialistic Competition. In Proceedings of the 2007 IEEE Congress on Evolutionary Computation, Singapore, 25–28 September 2007; pp. 4661–4667. [Google Scholar] [CrossRef]
- Khailaie, S.; Bahmanyar, P.; Lucas, C. Decision Making Strategy in the Designing of a Fuzzy Controller for Inverted Pendulum-Cart System. In Proceedings of the 2010 IEEE World Congress on Computational Intelligence (IEEE WCCI 2010), Barcelona, Spain, 18–23 July 2010. [Google Scholar] [CrossRef]
- Mirjalili, S.; Lewis, A. The Whale Optimization Algorithm. Adv. Eng. Softw. 2016, 95, 51–67. [Google Scholar] [CrossRef]
- Yu, Y.; Wang, H.; Li, N.; Su, Z.; Wu, J. Automatic Carrier Landing System Based on Active Disturbance Rejection Control with a Novel Parameters Optimizer. Aerosp. Sci. Technol. 2017, 69, 149–160. [Google Scholar] [CrossRef]
- Venkata Rao, R. Jaya: A Simple and New Optimization Algorithm for Solving Constrained and Unconstrained Optimization Problems. Int. J. Ind. Eng. Comput. 2016, 7, 19–34. [Google Scholar] [CrossRef]
- Azizipanah-Abarghooee, R.; Malekpour, M.; Zare, M.; Terzija, V. A New Inertia Emulator and Fuzzy-Based LFC to Support Inertial and Governor Responses Using Jaya Algorithm. In Proceedings of the 2016 IEEE Power and Energy Society General Meeting (PESGM), Boston, MA, USA, 17–21 July 2016; pp. 1–5. [Google Scholar] [CrossRef]
- Yazdani, M.; Jolai, F. Lion Optimization Algorithm (LOA): A Nature-Inspired Metaheuristic Algorithm. J. Comput. Des. Eng. 2016, 3, 24–36. [Google Scholar] [CrossRef]
- Shankar, R. Interconnected Power System Incoordination with UPFC a Nd Electric Vehicle; Springer: Berlin/Heidelberg, Germany, 2018; pp. 575–580. [Google Scholar]
- Yaz, E.E. Linear Matrix Inequalities in System and Control Theory; Springer: Berlin/Heidelberg, Germany, 2005; Volume 86, ISBN 089871334X. [Google Scholar]
- Sadollah, A.; Bahreininejad, A.; Eskandar, H.; Hamdi, M. Mine Blast Algorithm: A New Population Based Algorithm for Solving Constrained Engineering Optimization Problems. Appl. Soft Comput. J. 2013, 13, 2592–2612. [Google Scholar] [CrossRef]
- Majumdar, S.; Mandal, K.K.; Chakraborty, N. Tuning of Robust PID Controller Using Mine Blast Algorithm. In Proceedings of the 2014 International Conference on Control, Instrumentation, Energy and Communication (CIEC), Calcutta, India, 31 January–2 February 2014; pp. 752–756. [Google Scholar] [CrossRef]
- Mo, H. Research on Magnetotactic Bacteria Optimization Algorithm. In Proceedings of the 2012 IEEE Fifth International Conference on Advanced Computational Intelligence (ICACI), Nanjing, China, 18–20 October 2012; pp. 423–427. [Google Scholar] [CrossRef]
- Safiullah, S.; Rahman, A.; Ahmad Lone, S. Optimal Control of Electrical Vehicle Incorporated Hybrid Power System with Second Order Fractional-Active Disturbance Rejection Controller. Optim. Control Appl. Methods 2021, 1–30. [Google Scholar] [CrossRef]
- Faramarzi, A.; Heidarinejad, M.; Mirjalili, S.; Gandomi, A.H. Marine Predators Algorithm: A Nature-Inspired Metaheuristic. Expert Syst. Appl. 2020, 152, 113377. [Google Scholar] [CrossRef]
- Shukla, A.; Gupta, A.K. Damping Enhancement of DFIG Integrated Power System by Coordinated Controllers Tuning Using Marine Predators Algorithm; Springer: Singapore, 2021; Volume 710, ISBN 978-9-81158-814-3. [Google Scholar]
- Mirjalili, S.; Mirjalili, S.M.; Hatamlou, A. Multi-Verse Optimizer: A Nature-Inspired Algorithm for Global Optimization. Neural Comput. Appl. 2016, 27, 495–513. [Google Scholar] [CrossRef]
- El Yakine Kouba, N.; Menaa, M.; Hasni, M.; Tehrani, K.; Boudour, M. A Novel Optimized Fuzzy-PID Controller in Two-Area Power System with HVDC Link Connection. In Proceedings of the 2016 International Conference on Control, Decision and Information Technologies (CoDIT), Saint Julian’s, Malta, 6–8 April 2016; pp. 204–209. [Google Scholar] [CrossRef]
- Deb, K.; Pratap, A.; Agarwal, S.; Meyarivan, T. A Fast and Elitist Multiobjective Genetic Algorithm: NSGA-II. IEEE Trans. Evol. Comput. 2002, 6, 182–197. [Google Scholar] [CrossRef]
- Sreenuch, T.; Tsourdos, A.; Hughes, E.J.; White, B.A. Lateral Acceleration Control Design of a Non-Linear Homing Missile Using Multi-Objective Evolution Strategies. Proc. Am. Control Conf. 2004, 4, 3628–3633. [Google Scholar] [CrossRef]
- Cheng, S.; Lu, H.; Lei, X.; Shi, Y. A Quarter Century of Particle Swarm Optimization. Complex Intell. Syst. 2018, 4, 227–239. [Google Scholar] [CrossRef]
- Okada, T.; Watanabe, T.; Yasuda, K. Parameter Tuning of Fixed Structure Controller for Power System Stability Enhancement. Proc. IEEE Power Eng. Soc. Transm. Distrib. Conf. 2002, 1, 162–167. [Google Scholar] [CrossRef]
- Cottle, R.W.; Infanger, G. Harry Markowitz and the Early History of Quadratic Programming. In Handbook of Portfolio Construction; Springer: Boston, MA, USA, 2010; pp. 179–211. [Google Scholar]
- Spong, M.W.; Thorp, J.S.; Kleinwaks, J.M. The Control of Robot Manipulators with Bounded Input. IEEE Trans. Automat. Contr. 1986, 31, 483–490. [Google Scholar] [CrossRef]
- Mirjalili, S.; Gandomi, A.H.; Mirjalili, S.Z.; Saremi, S.; Faris, H.; Mirjalili, S.M. Salp Swarm Algorithm: A Bio-Inspired Optimizer for Engineering Design Problems. Adv. Eng. Softw. 2017, 114, 163–191. [Google Scholar] [CrossRef]
- Baygi, S.M.H.; Karsaz, A.; Elahi, A. A Hybrid Optimal PID-Fuzzy Control Design for Seismic Exited Structural System against Earthquake: A Salp Swarm Algorithm. In Proceedings of the 2018 6th Iranian Joint Congress on Fuzzy and Intelligent Systems (CFIS), Kerman, Iran, 28 February–2 March 2018; pp. 220–225. [Google Scholar] [CrossRef]
- Mirjalili, S. SCA: A Sine Cosine Algorithm for Solving Optimization Problems. Knowl. Based Syst. 2016, 96, 120–133. [Google Scholar] [CrossRef]
- Mostafa Elsaied, M.; Abdallah Attia, M.; Abdelhamed Mostafa, M.; Fouad Mekhamer, S. Application of Different Optimization Techniques to Load Frequency Control with WECS in a Multi-Area System. Electr. Power Compon. Syst. 2018, 46, 739–756. [Google Scholar] [CrossRef]
- Moghdani, R.; Salimifard, K. Volleyball Premier League Algorithm. Appl. Soft Comput. J. 2018, 64, 161–185. [Google Scholar] [CrossRef]
- Murali, S.; Shankar, R. Exploration of Novel Optimal Fuzzy-Based Controller for Enhancement of Frequency Regulation of Deregulated Hybrid Power System with Modified HVDC Tie-Line. Int. J. Intell. Syst. 2022, 37, 4163–4189. [Google Scholar] [CrossRef]
- Faramarzi, A.; Heidarinejad, M.; Stephens, B.; Mirjalili, S. Equilibrium Optimizer: A Novel Optimization Algorithm. Knowl. Based Syst. 2020, 191, 105190. [Google Scholar] [CrossRef]
- Aryan, P.; Shankar, R.; Ranjan, M. Equilibrium Optimized AGC of Multi-Area Restructured Power System Using Cascaded Fractional Fuzzy Controller. In Proceedings of the 2020 International Conference on Emerging Frontiers in Electrical and Electronic Technologies (ICEFEET), Patna, India, 10–11 July 2020. [Google Scholar] [CrossRef]
- Sethi, S.; Sorger, G. A theory of rolling horizon decision making. Ann. Oper. Res. 1991, 29, 387–415. [Google Scholar] [CrossRef]
- Hexu, S.; Baoming, G.; Yan, C.; Xiaojie, Z.; Wenjiang, L. Dynamic Matrix Control (DMC) for the Step Motion of Synchronous Motor. In Proceedings of the Power Conversion Conference-PCC’97, Nagaoka, Japan, 6 August 1997; Volume 1, pp. 151–156. [Google Scholar] [CrossRef]
- Li, S.; Chen, H.; Wang, M.; Heidari, A.A.; Mirjalili, S. Slime Mould Algorithm: A New Method for Stochastic Optimization. Futur. Gener. Comput. Syst. 2020, 111, 300–323. [Google Scholar] [CrossRef]
- Izci, D.; Ekinci, S.; Zeynelgil, H.L.; Hedley, J. Fractional Order PID Design Based on Novel Improved Slime Mould Algorithm. Electr. Power Compon. Syst. 2021, 49, 901–918. [Google Scholar] [CrossRef]
- Dhiman, G.; Kumar, V. Seagull Optimization Algorithm: Theory and Its Applications for Large-Scale Industrial Engineering Problems. Knowl. Based Syst. 2019, 165, 169–196. [Google Scholar] [CrossRef]
- Kalyan, C.H.N.S.; Suresh, C.V.; Rajesh, M. Performance Evaluation of Several Fuzzy Controllers in AGC of Dual Area System with Time Delays. In Proceedings of the 2021 2nd International Conference for Emerging Technology (INCET), Belagavi, India, 21–23 May 2021; pp. 1–6. [Google Scholar] [CrossRef]
- Rao, R.V.; Savsani, V.J.; Vakharia, D.P. Teaching-Learning-Based Optimization: A Novel Method for Constrained Mechanical Design Optimization Problems. CAD Comput. Aided Des. 2011, 43, 303–315. [Google Scholar] [CrossRef]
- Khooban, M.H.; Alfi, A.; Abadi, D.N.M. Teaching-Learning-Based Optimal Interval Type-2 Fuzzy PID Controller Design: A Nonholonomic Wheeled Mobile Robots. Robotica 2013, 31, 1059–1071. [Google Scholar] [CrossRef]
- Eskandar, H.; Sadollah, A.; Bahreininejad, A.; Hamdi, M. Water Cycle Algorithm—A Novel Metaheuristic Optimization Method for Solving Constrained Engineering Optimization Problems. Comput. Struct. 2012, 110–111, 151–166. [Google Scholar] [CrossRef]
- Sarvi, M.; Avanaki, I.N. An Optimized Fuzzy Logic Controller by Water Cycle Algorithm for Power Management of Stand-Alone Hybrid Green Power Generation. Energy Convers. Manag. 2015, 106, 118–126. [Google Scholar] [CrossRef]
- Bayraktar, Z.; Komurcu, M.; Werner, D.H. Wind Driven Optimization (WDO): A Novel Nature-Inspired Optimization Algorithm and Its Application to Electromagnetics. In Proceedings of the 2010 IEEE Antennas and Propagation Society International Symposium, Toronto, ON, Canada, 11–17 July 2010; pp. 10–13. [Google Scholar] [CrossRef]
- Patel, P.; Swain, M.; Rout, S.; Patel, P. DSA/WDO Based PI Controller Tuning for D- STATCOM for Reactive Power Compensation. In Proceedings of the 2015 IEEE UP Section Conference on Electrical Computer and Electronics (UPCON), Allahabad, India, 4–6 December 2015; pp. 1–6. [Google Scholar]
- Khayyam, H.; Ranjbarzadeh, H.; Marano, V. Intelligent Control of Vehicle to Grid Power. J. Power Sources 2012, 201, 1–9. [Google Scholar] [CrossRef]
- Ota, Y.; Taniguchi, H.; Nakajima, T.; Liyanage, K.M.; Baba, J.; Yokoyama, A. Autonomous Distributed V2G (Vehicle-to-Grid) Satisfying Scheduled Charging. IEEE Trans. Smart Grid 2012, 3, 559–564. [Google Scholar] [CrossRef]
- Datta, M. Fuzzy Logic Based Frequency Control by V2G Aggregators. In Proceedings of the 2014 IEEE 5th International Symposium on Power Electronics for Distributed Generation Systems (PEDG), Galway, Ireland, 24–27 June 2014. [Google Scholar] [CrossRef]
- Ma, T.; Mohammed, O. Real-Time Plug-in Electric Vehicles Charging Control for V2G Frequency Regulation. In Proceedings of the IECON 2013-39th Annual Conference of the IEEE Industrial Electronics Society, Vienna, Austria, 10–13 November 2013; pp. 1197–1202. [Google Scholar] [CrossRef]
- Liu, H.; Hu, Z.; Song, Y.; Lin, J. Decentralized Vehicle-to-Grid Control for Primary Frequency Regulation Considering Charging Demands. IEEE Trans. Power Syst. 2013, 28, 3480–3489. [Google Scholar] [CrossRef]
- Han, H.; Huang, D.; Liu, D.; Li, Q. Autonomous Frequency Regulation Control of V2G(Vehicle-to-Grid) System. In Proceedings of the 2017 29th Chinese Control And Decision Conference (CCDC), Chongqing, China, 28–30 May 2017; pp. 5826–5829. [Google Scholar] [CrossRef]
- Xu, X.; Zhang, C.; Gu, L. Decentralized Primary Frequency Regulation Control Strategy for Vehicle-To-Grid. In Proceedings of the 2016 3rd International Conference on Systems and Informatics, ICSAI 2016, Shanghai, China, 19–21 November 2016; pp. 217–222. [Google Scholar]
- Liu, H.; Huang, K.; Yang, Y.; Wei, H.; Ma, S. Real-Time Vehicle-to-Grid Control for Frequency Regulation with High Frequency Regulating Signal. Prot. Control Mod. Power Syst. 2018, 3, 1–8. [Google Scholar] [CrossRef]
- Liu, H.; Huang, K.; Wang, N.; Qi, J.; Wu, Q.; Ma, S.; Li, C. Optimal Dispatch for Participation of Electric Vehicles in Frequency Regulation Based on Area Control Error and Area Regulation Requirement. Appl. Energy 2019, 240, 46–55. [Google Scholar] [CrossRef]
- Magome, N.; Tamura, S. A New Decentralized Control of EVs for Load Frequency Control Retaining EV Users’ Convenience. In Proceedings of the 2018 IEEE International Telecommunications Energy Conference (INTELEC), EVTeC 2018, Turino, Italy, 7–11 October 2018; Volume 2018, p. 2. [Google Scholar]
- Zhang, Q.; Li, Y.; Li, C.; Li, C. Grid Frequency Regulation Strategy Considering Individual Driving Demand of Electric Vehicle. Electr. Power Syst. Res. 2018, 163, 38–48. [Google Scholar] [CrossRef]
- Zhong, J.; He, L.; Li, C.; Cao, Y.; Wang, J.; Fang, B.; Zeng, L.; Xiao, G. Coordinated Control for Large-Scale EV Charging Facilities and Energy Storage Devices Participating in Frequency Regulation. Appl. Energy 2014, 123, 253–262. [Google Scholar] [CrossRef]
- Gamit, M.; Shukla, A.; Kumar, R.; Verma, K. Supplementary Frequency Control in Power Systems via Decentralised V2G/G2V Support. J. Eng. 2019, 2019, 5287–5291. [Google Scholar] [CrossRef]
- Keshavarz, H.; Mohammadi, M. A Smart Decentralized Vehicle-to-Grid Scheme for Primary Frequency Control. Stud. Syst. Decis. Control 2019, 186, 147–163. [Google Scholar] [CrossRef]
- Debbarma, S.; Dutta, A. Utilizing Electric Vehicles for LFC in Restructured Power Systems Using Fractional Order Controller. IEEE Trans. Smart Grid 2017, 8, 2554–2564. [Google Scholar] [CrossRef]
- Dutta, A.; Debbarma, S. Contribution of electric vehicles for frequency regulation in presence of diverse power sources and transmission links. In Proceedings of the 2018 IEEE International Conference on Industrial Technology (ICIT), Lyon, France, 20–22 February 2018; pp. 1177–1182. [Google Scholar]
- Dutta, A.; Debbarma, S. Frequency Regulation in Deregulated Market Using Vehicle-to-Grid Services in Residential Distribution Network. IEEE Syst. J. 2018, 12, 2812–2820. [Google Scholar] [CrossRef]
- Khalghani, M.R.; Khushalani-Solanki, S.; Solanki, J. A Load Frequency Control for Microgrid Including Stochastic Elements Based on Hebb Learning. In Proceedings of the 2017 North American Power Symposium (NAPS), Morgantown, WV, USA, 17–19 September 2017. [Google Scholar] [CrossRef]
- Alhelou, H.H.; Hamedani-Golshan, M.E.; Heydarian-Forushani, E.; Al-Sumaiti, A.S.; Siano, P. Decentralized Fractional Order Control Scheme for LFC of Deregulated Nonlinear Power Systems in Presence of EVs and RER. In Proceedings of the 2018 International Conference on Smart Energy Systems and Technologies, SEST 2018—Proceedings, Seville, Spain, 10–12 September 2018; pp. 1–5. [Google Scholar]
- Khezri, R.; Oshnoei, A.; Hagh, M.T.; Muyeen, S.M. Coordination of Heat Pumps, Electric Vehicles and AGC for Efficient LFC in a Smart Hybrid Power System via SCA-Based Optimized FOPID Controllers. Energies 2018, 11, 420. [Google Scholar] [CrossRef] [Green Version]
- Babaei, F.; Safari, A. SCA Based Fractional-Order PID Controller Considering Delayed EV Aggregators. J. Oper. Autom. Power Eng. 2020, 8, 75–85. [Google Scholar] [CrossRef]
- Annamraju, A.; Nandiraju, S. Coordinated Control of Conventional Power Sources and PHEVs Using Jaya Algorithm Optimized PID Controller for Frequency Control of a Renewable Penetrated Power System. Prot. Control Mod. Power Syst. 2019, 4, 1. [Google Scholar] [CrossRef]
- Kumari, S.; Shankar, G. Maiden Application of Cascade Tilt-Integral–Tilt-Derivative Controller for Performance Analysis of Load Frequency Control of Interconnected Multi-Source Power System. IET Gener. Transm. Distrib. 2019, 13, 5326–5338. [Google Scholar] [CrossRef]
- Murali, S.; Prakash, A.; Shankar, R. LFC of Multi Area Power System with Electric Vehicle Using VPL Optimized Controller. In Proceedings of the 1st International Conference on Power Electronics Applications and Technology in Present Energy Scenario, PETPES 2019, Mangalore, India, 29–31 August 2019; Volume 2, pp. 2–7. [Google Scholar]
- Oshnoei, A.; Khezri, R.; Muyeen, S.M.; Oshnoei, S.; Blaabjerg, F. Automatic Generation Control Incorporating Electric Vehicles. Electr. Power Compon. Syst. 2019, 47, 678–690. [Google Scholar] [CrossRef]
- Babaei, F.; Lashkari, Z.B.; Safari, A.; Farrokhifar, M.; Salehi, J. Salp Swarm Algorithm-Based Fractional-Order PID Controller for LFC Systems in the Presence of Delayed EV Aggregators. IET Electr. Syst. Transp. 2020, 10, 259–267. [Google Scholar] [CrossRef]
- Chorasiya, G.; Suhag, S. A Comparative Study of MVO and SSA Optimized PID Controller for LFC in EV Integrated Multi Area Network. In Proceedings of the 2020 11th International Conference on Computing, Communication and Networking Technologies, ICCCNT 2020, Kharagpur, India, 1–3 July 2020. [Google Scholar]
- Gaur, P.; Soren, N.; Bhowmik, D. Load Frequency Control of Hybrid Power System Incorporating Vehicle-to-Grid Technology Considering AC Transmission Links. J. Electr. Eng. Technol. 2020, 15, 381–391. [Google Scholar] [CrossRef]
- Khokhar, B.; Dahiya, S.; Singh Parmar, K.P. A Robust Cascade Controller for Load Frequency Control of a Standalone Microgrid Incorporating Electric Vehicles. Electr. Power Compon. Syst. 2020, 48, 711–726. [Google Scholar] [CrossRef]
- Mishra, D.; Nayak, P.C.; Bhoi, S.K.; Prusty, R.C. Grey Wolf Optimization Algorithm Based Cascaded PID Controller for Load-Frequency Control of OFF-Grid Electric Vehicle Integrated Microgrid. In Proceedings of the Proceedings—2020 IEEE International Symposium on Sustainable Energy, Signal Processing and Cyber Security, iSSSC 2020, Gunupur Odisha, India, 16–17 December 2020. [Google Scholar]
- Raj, U.; Shankar, R. Effectiveness of Whale Optimization Based I+PD Controller for LFC of Plug-in Electric Vehicle Included Multi-Area System; Advances in Intelligent Systems and Computing; Springer: Singapore, 2020; Volume 1154, ISBN 978-9-81154-031-8. [Google Scholar]
- Das, S.; Saikia, L.C.; Datta, S. Maiden Application of TIDN-(1+PI) Cascade Controller in LFC of a Multi-Area Hydro-Thermal System Incorporating EV–Archimedes Wave Energy-Geothermal-Wind Generations under Deregulated Scenario. Int. Trans. Electr. Energy Syst. 2021, 1, 1–23. [Google Scholar] [CrossRef]
- Ahmed, E.M.; Elmelegi, A.; Shawky, A.; Aly, M.; Alhosaini, W.; Mohamed, E.A. Frequency Regulation of Electric Vehicle-Penetrated Power System Using MPA-Tuned New Combined Fractional Order Controllers. IEEE Access 2021, 9, 107548–107565. [Google Scholar] [CrossRef]
- Mohammed Roshan, K.; Ismayil, C. Hybrid Electric Vehicle Integrated LFC with Renewable Energy Penetration under Restructured Bilateral Power System. In Proceedings of the ICCISc 2021—2021 International Conference on Communication, Control and Information Sciences, Idukki, India, 16–18 June 2021. [Google Scholar]
- Das, S.; Bhoi, S.K.; Nayak, P.C.; Prusty, R.C. Slime Mould Algorithm Based Fractional Order Cascaded Controller for Frequency Control of 2-Area AC Microgrid. In Proceedings of the 2021 International Conference in Advances in Power, Signal, and Information Technology (APSIT), Bhadarwar, India, 8–10 October 2021; Volume 2. [Google Scholar] [CrossRef]
- Das, S.; Panda, S. An Optimized Fractional Order Cascade Controller for Frequency Regulation of Power System with Renewable Energies and Electric Vehicles. Energy Syst. 2021, 14, 171–195. [Google Scholar] [CrossRef]
- Das, S.; Acharjee, P.; Bhattacharya, A. Coordinated Charging Scheduling for Electric Vehicles and Optimal Tuning of the Controller for Frequency Regulation under Uncertain Environment. In Proceedings of the 2021 IEEE Industry Applications Society Annual Meeting (IAS), Virtual, 10–14 October 2021; pp. 1–6. [Google Scholar] [CrossRef]
- Elmelegi, A.; Mohamed, E.A.; Aly, M.; Ahmed, E.M. An Enhanced Slime Mould Algorithm Optimized LFC Scheme for Interconnected Power Systems. In Proceedings of the 2021 22nd International Middle East Power Systems Conference (MEPCON), Assiut, Egypt, 14–16 December 2021; Volume 22, pp. 613–618. [Google Scholar] [CrossRef]
- Farooq, Z.; Rahman, A.; Lone, S.A. Load Frequency Control of Multi-Source Electrical Power System Integrated with Solar-Thermal and Electric Vehicle. Int. Trans. Electr. Energy Syst. 2021, 31, e12918. [Google Scholar] [CrossRef]
- Farooq, Z.; Rahman, A.; Lone, S.A. System Dynamics and Control of EV Incorporated Deregulated Power System Using MBO-Optimized Cascaded ID-PD Controller. Int. Trans. Electr. Energy Syst. 2021, 31, 1–22. [Google Scholar] [CrossRef]
- Kalyan, C.N.S.; Suresh, C.V. PIDD Controller for AGC of Nonlinear System with PEV Integration and AC-DC Links. In Proceedings of the 2021 International Conference on Sustainable Energy and Future Electric Transportation (SEFET), Hyderabad, India, 21–23 January 2021; Volume 2021, pp. 2–7. [Google Scholar] [CrossRef]
- Khokhar, B.; Dahiya, S.; Parmar, K.P.S. Load Frequency Control of a Multi-Microgrid System Incorporating Electric Vehicles. Electr. Power Compon. Syst. 2021, 49, 867–883. [Google Scholar] [CrossRef]
- Pahadasingh, S.; Jena, C.; Panigrahi, C.K. SCA Based Load Frequency Control Incorporating Electric Vehicle Using Cascaded Controller. In Proceedings of the ICPEE 2021—2021 1st International Conference on Power Electronics and Energy, Vancouver, BC, Canada, 10–14 October 2021; p. 2021. [Google Scholar]
- Safari, A.; Babaei, F.; Farrokhifar, M. A Load Frequency Control Using a PSO-Based ANN for Micro-Grids in the Presence of Electric Vehicles. Int. J. Ambient Energy 2021, 42, 688–700. [Google Scholar] [CrossRef]
- Safiullah, S.; Rahman, A.; Lone, S.A. State-Observer Based IDD Controller for Concurrent Frequency-Voltage Control of a Hybrid Power System with Electric Vehicle Uncertainties. Int. Trans. Electr. Energy Syst. 2021, 31, 1–26. [Google Scholar] [CrossRef]
- Shukla, H.; Raju, M. Load Frequency Control of Microgrid Including Small Hydro Power Plant and Distributed Generation with EV Penetration. In Proceedings of the 2021 IEEE 2nd International Conference on Electrical Power and Energy Systems, ICEPES 2021, Bhopal, India, 10–11 December 2021; pp. 11–15. [Google Scholar]
- Sriramula, S.; Reddy, B.R. Performance of Fractional Order Robust Controller for LFC of EVs Integrated Three Area Deregulated Power System. In Proceedings of the 2021 2nd International Conference for Emerging Technology (INCET), Bhopal, India, 21–23 May 2021; Volume 2021, pp. 1–7. [Google Scholar] [CrossRef]
- Mudi, J.; Shiva, C.K.; Mukherjee, V. Quasi-Oppositional Whale Optimization Optimized Load Frequency Stabilization of Hybrid Power Systems Integrated with Electric Vehicle. Adv. Theory Simul. 2022, 5, 1–16. [Google Scholar] [CrossRef]
- Kumar, A.; Shankar, R. A Cascade Fractional Controller for Hybrid Power System with Hybrid Energy Storage. In Proceedings of the 2022 2nd International Conference on Emerging Frontiers in Electrical and Electronic Technologies (ICEFEET), Online, 24–25 June 2022; pp. 1–5. [Google Scholar] [CrossRef]
- Farooq, Z.; Safiullah, S.; Rahman, A. Load Frequency Control of Hybrid Power System Using Modified Disturbance Rejection Controller. In Proceedings of the 4th International Conference on Energy, Power, and Environment, ICEPE 2022, Shillong, India, 29 April–1 May 2022. [Google Scholar]
- Khamari, D.; Sahu, R.K.; Panda, S. Adaptive Differential Evolution Based PDF plus (1+PI) Controller for Frequency Regulation of the Distributed Power Generation System with Electric Vehicle. Int. J. Ambient Energy 2022, 43, 3040–3054. [Google Scholar] [CrossRef]
- Mohamed, E.A.; Aly, M.; Watanabe, M. New Tilt Fractional-Order Integral Derivative with Fractional Filter (TFOIDFF) Controller with Artificial Hummingbird Optimizer for LFC in Renewable Energy Power Grids. Mathematics 2022, 10, 3006. [Google Scholar] [CrossRef]
- Naga Sai Kalian, C.; Bajaj, M.; Kamel, S.; Jurado, F. Load Frequency Control of Multi-Area Power System with Integration of SMES and Plug-In Electric Vehicles. In Proceedings of the Proceedings—2022 IEEE 4th Global Power, Energy and Communication Conference, GPECOM 2022, Cappadocia, Turkey, 14–17 June 2022; Volume 2022, pp. 349–354. [Google Scholar]
- Sariki, M.; Shankar, R. Optimal CC-2DOF(PI)-PDF Controller for LFC of Restructured Multi-Area Power System with IES-Based Modified HVDC Tie-Line and Electric Vehicles. Eng. Sci. Technol. Int. J. 2022, 32, 101058. [Google Scholar] [CrossRef]
- Pahadasingh, S.; Jena, C.; Panigrahi, C.K. Electric Vehicles Using FOPID Controller with HVDC Link; Springer: Singapore, 2020; ISBN 978-9-81152-305-2. [Google Scholar]
- Abdul Kader, M.O.; Akindeji, K.T.; Sharma, G. Application of PHEVs Influence on Frequency Regulation of a Two Area Power System. In Proceedings of the 2022 10th International Conference on Smart Grid (icSmartGrid), Istanbul, Turkey, 27–29 June 2022; pp. 23–28. [Google Scholar] [CrossRef]
- Janfeshan, K.; Masoum, M.A.S.; Deilami, S. V2G Application to Frequency Regulation in a Microgrid Using Decentralized Fuzzy Controller. In Proceedings of the 2014 International Conference on Modelling, Identification & Control, Melbourne, VIC, Australia, 3–5 December 2014; pp. 361–364. [Google Scholar] [CrossRef]
- Falahati, S.; Taher, S.A.; Shahidehpour, M. Grid Frequency Control with Electric Vehicles by Using of an Optimized Fuzzy Controller. Appl. Energy 2016, 178, 918–928. [Google Scholar] [CrossRef]
- Aliabadi, S.F.; Taher, S.A.; Shahidehpour, M. Smart Deregulated Grid Frequency Control in Presence of Renewable Energy Resources by EVs Charging Control. IEEE Trans. Smart Grid 2018, 9, 1073–1085. [Google Scholar] [CrossRef]
- Vachirasricirikul, S.; Ngamroo, I. Robust LFC in a Smart Grid with Wind Power Penetration by Coordinated V2G Control and Frequency Controller. IEEE Trans. Smart Grid 2014, 5, 371–380. [Google Scholar] [CrossRef]
- Khooban, M.H.; Niknam, T.; Blaabjerg, F.; Davari, P.; Dragicevic, T. A Robust Adaptive Load Frequency Control for Micro-Grids. ISA Trans. 2016, 65, 220–229. [Google Scholar] [CrossRef]
- Khooban, M.H.; Niknam, T.; Blaabjerg, F.; Dragičević, T. A New Load Frequency Control Strategy for Micro-Grids with Considering Electrical Vehicles. Electr. Power Syst. Res. 2017, 143, 585–598. [Google Scholar] [CrossRef]
- Lotfy, M.E.; Senjyu, T.; Farahat, M.A.F.; Abdel-Gawad, A.F.; Matayoshi, H. A Polar Fuzzy Control Scheme for Hybrid Power System Using Vehicle-to-Grid Technique. Energies 2017, 10, 1083. [Google Scholar] [CrossRef]
- Khooban, M.H.; Niknam, T.; Shasadeghi, M.; Dragicevic, T.; Blaabjerg, F. Load Frequency Control in Microgrids Based on a Stochastic Noninteger Controller. IEEE Trans. Sustain. Energy 2018, 9, 853–861. [Google Scholar] [CrossRef]
- Annamraju, A.; Nandiraju, S. Robust Frequency Control in a Renewable Penetrated Power System: An Adaptive Fractional Order-Fuzzy Approach. Prot. Control Mod. Power Syst. 2019, 4, 16. [Google Scholar] [CrossRef]
- Yaseen, M.; Sathyanarayana, G.; Anil Kumar, T. An Intelligent and Non Integer Order Coordinate Control for LFC of Multi Area Power System Integrated with EVs. Int. J. Eng. Adv. Technol. 2019, 9, 7546–7550. [Google Scholar] [CrossRef]
- Sah, B.; Kumar, P.; Bose, S.K. A Fuzzy Logic and Artificial Neural Network-Based Intelligent Controller for a Vehicle-to-Grid System. IEEE Syst. J. 2020, 15, 3301–3311. [Google Scholar] [CrossRef]
- Song, D.; Shao, Y.; Zou, S.; Zhao, X.; Li, S.; Ma, Z. Fuzzy-Logic-Based Adaptive Internal Model Control for Load Frequency Control Systems with Electric Vehicles. In Proceedings of the 2020 39th Chinese Control Conference (CCC), Shenyang, China, 27–29 July 2020; pp. 1987–1993. [Google Scholar] [CrossRef]
- Gheisarnejad, M.; Khooban, M.H. Multi-Microgrids with a Frequency Regulation-Based V2G Technology: Systems Analysis, Modeling, and Control. Power Syst. 2021, 2, 1–26. [Google Scholar] [CrossRef]
- Khooban, M.H.; Member, S.; Gheisarnejad, M. Based Type-II Fuzzy System: Frequency Regulation in Microgrids; Springer: Berlin/Heidelberg, Germany, 2020; Volume 5, pp. 1–11. [Google Scholar]
- Mohanty, D.; Panda, S. Modified Salp Swarm Algorithm-Optimized Fractional-Order Adaptive Fuzzy PID Controller for Frequency Regulation of Hybrid Power System with Electric Vehicle. J. Control. Autom. Electr. Syst. 2021, 32, 416–438. [Google Scholar] [CrossRef]
- Mohanty, D.; Panda, S. Sine Cosine Adopted Harris’ Hawks Optimization for Function Optimization and Power System Frequency Controller Design. Int. Trans. Electr. Energy Syst. 2021, 31, e12915. [Google Scholar] [CrossRef]
- Sadoudi, S.; Boudour, M.; Kouba, N.E.Y. Multi-Microgrid Intelligent Load Shedding for Optimal Power Management and Coordinated Control with Energy Storage Systems. Int. J. Energy Res. 2021, 45, 15857–15878. [Google Scholar] [CrossRef]
- Sharma, P.; Mishra, A.; Saxena, A.; Shankar, R. A Novel Hybridized Fuzzy PI-LADRC Based Improved Frequency Regulation for Restructured Power System Integrating Renewable Energy and Electric Vehicles. IEEE Access 2021, 9, 7597–7617. [Google Scholar] [CrossRef]
- Aryan, P.; Raja, G.L. Design and Analysis of Novel QOEO Optimized Parallel Fuzzy FOPI-PIDN Controller for Restructured AGC with HVDC and PEV. Iran. J. Sci. Technol.-Trans. Electr. Eng. 2022, 46, 565–587. [Google Scholar] [CrossRef]
- Iqbal, S.; Habib, S.; Khan, N.H.; Ali, M.; Aurangzeb, M.; Ahmed, E.M. Electric Vehicles Aggregation for Frequency Control of Microgrid under Various Operation Conditions Using an Optimal Coordinated Strategy. Sustainability 2022, 14, 3108. [Google Scholar] [CrossRef]
- Pahasa, J.; Ngamroo, I. PHEVs Bidirectional Charging/Discharging and SoC Control for Microgrid Frequency Stabilization Using Multiple MPC. IEEE Trans. Smart Grid 2015, 6, 526–533. [Google Scholar] [CrossRef]
- Yang, J.; Zeng, Z.; Tang, Y.; Yan, J.; He, H.; Wu, Y. Load Frequency Control in Isolated Micro-Grids with Electrical Vehicles Based on Multivariable Generalized Predictive Theory. Energies 2015, 8, 2145–2164. [Google Scholar] [CrossRef]
- Ali, A.; Khan, B.; Mehmood, C.A.; Ullah, Z.; Ali, S.M.; Ullah, R. Decentralized MPC Based Frequency Control for Smart Grid. In Proceedings of the ICECE 2017—2017 International Conference on Energy Conservation and Efficiency, Lahore, Pakistan, 22–23 November 2017; Volume 2018, pp. 1–6, ISBN 978-1-53863-606-0. [Google Scholar]
- Asghar, R.; Ali, A.; Rehman, F.; Ullah, R.; Ullah, K.; Ullah, Z.; Sarwar, M.A.; Khan, B. Load Frequency Control for EVs Based Smart Grid System Using PID and MPC. In Proceedings of the 2020 3rd International Conference on Computing, Mathematics and Engineering Technologies: Idea to Innovation for Building the Knowledge Economy, iCoMET 2020, Sukkur, Pakistan, 29–30 January 2020; pp. 1–6. [Google Scholar]
- He, B.; Wang, Y.; Wang, X.; Yang, J. Load Frequency Control in Microgrid with CHP Based on Generalized Predictive Control. In Proceedings of the 2019 IEEE PES Asia-Pacific Power and Energy Engineering Conference (APPEEC), Macao, China, 1–4 December 2019; pp. 1–6. [Google Scholar] [CrossRef]
- Ma, M.M.; Pan, J.J.; Liu, X.J. Model Predictive Load Frequency Control of Microgrid with Electrical Vehicles. Jilin Daxue Xuebao (Gongxueban)/J. Jilin Univ. (Eng. Technol. Ed.) 2019, 49, 1644–1652. [Google Scholar] [CrossRef]
- Mishra, S.; Nayak, P.C.; Prusty, U.C.; Prusty, R.C. Model Predictive Controller Based Load Frequency Control of Isolated Microgrid System Integrated to Plugged-in Electric Vehicle. In Proceedings of the 1st Odisha International Conference on Electrical Power Engineering, Communication and Computing Technology, ODICON 2021, Bhubaneswar, India, 8–9 January 2021; pp. 4–8. [Google Scholar]
- Rao, Y.; Yang, J.; Xiao, J.; Xu, B.; Liu, W.; Li, Y. A Frequency Control Strategy for Multimicrogrids with V2G Based on the Improved Robust Model Predictive Control. Energy 2021, 222, 3. [Google Scholar] [CrossRef]
- Khokhar, B.; Parmar, K.P.S. A Novel Adaptive Intelligent MPC Scheme for Frequency Stabilization of a Microgrid Considering SoC Control of EVs. Appl. Energy 2022, 309, 2021. [Google Scholar] [CrossRef]
- Tang, Y.; Yang, J.; Yan, J.; Zeng, Z.; He, H. Frequency Control Using On-Line Learning Method for Island Smart Grid with EVs and PVs. In Proceedings of the 2014 International Joint Conference on Neural Networks (IJCNN), Beijing, China, 6–11 July 2014; pp. 1440–1446. [Google Scholar] [CrossRef]
- Gajduk, A.; Zdraveski, V.; Basnarkov, L.; Todorovski, M.; Kocarev, L. A Strategy for Power System Stability Improvement via Controlled Charge/Discharge of Plug-in Electric Vehicles. arXiv 2015, arXiv:1506.07097. [Google Scholar]
- Liu, H.; Hu, Z.; Song, Y.; Wang, J.; Xie, X. Vehicle-to-Grid Control for Supplementary Frequency Regulation Considering Charging Demands. IEEE Trans. Power Syst. 2015, 30, 3110–3119. [Google Scholar] [CrossRef]
- Tang, Y.; Yang, J.; Yan, J.; He, H. Intelligent Load Frequency Controller Using GrADP for Island Smart Grid with Electric Vehicles and Renewable Resources. Neurocomputing 2015, 170, 406–416. [Google Scholar] [CrossRef]
- Kaur, K.; Rana, R.; Kumar, N.; Singh, M.; Mishra, S. A Colored Petri Net Based Frequency Support Scheme Using Fleet of Electric Vehicles in Smart Grid Environment. IEEE Trans. Power Syst. 2016, 31, 4638–4649. [Google Scholar] [CrossRef]
- Pham, T.N.; Trinh, H.; Van Hien, L. Load Frequency Control of Power Systems with Electric Vehicles and Diverse Transmission Links Using Distributed Functional Observers. IEEE Trans. Smart Grid 2016, 7, 238–252. [Google Scholar] [CrossRef]
- Sahoo, S.; Pullaguram, D.R.; Mishra, S. A Consensus Priority Algorithm Based V2G Charging Framework for Frequency Response. In Proceedings of the 2016 IEEE 7th Power India International Conference (PIICON), Bikaner, India, 25–27 November 2016. [Google Scholar] [CrossRef]
- Izadkhast, S.; Garcia-Gonzalez, P.; Frias, P.; Bauer, P. Design of Plug-In Electric Vehicle’s Frequency-Droop Controller for Primary Frequency Control and Performance Assessment. IEEE Trans. Power Syst. 2017, 32, 4241–4254. [Google Scholar] [CrossRef]
- Mu, C.; Liu, W.; Xu, W.; Rabiul Islam, M. Observer-Based Load Frequency Control for Island Microgrid with Photovoltaic Power. Int. J. Photoenergy 2017, 2017, 15–18. [Google Scholar] [CrossRef]
- Mu, C.; Wang, D.; Sun, C. Robust Frequency Control Design on Micro-Grid with Unknown Dead-Zone Nonlinearity. In Proceedings of the 2017 32nd Youth Academic Annual Conference of Chinese Association of Automation (YAC), Hefei, China, 19–21 May 2017; pp. 14–19. [Google Scholar] [CrossRef]
- Janfeshan, K.; Masoum, M.A.S. Hierarchical Supervisory Control System for PEVs Participating in Frequency Regulation of Smart Grids. IEEE Power Energy Technol. Syst. J. IEEE 2017, 4, 84–93. [Google Scholar] [CrossRef]
- Fakhari Moghaddam Arani, M.; Mohamed, Y.A.R.I. Cooperative Control of Wind Power Generator and Electric Vehicles for Microgrid Primary Frequency Regulation. IEEE Trans. Smart Grid 2018, 9, 5677–5686. [Google Scholar] [CrossRef]
- Kuang, Y.; Li, C.; Zhou, B.; Cao, Y.; Yang, H.; Zeng, L. Asynchronous Method for Frequency Regulation by Dispersed Plug-in Electric Vehicles. Int. J. Emerg. Electr. Power Syst. 2018, 19, 1–12. [Google Scholar] [CrossRef]
- Rokrok, E.; Shafie-Khah, M.; Siano, P.; Catalao, J.P.S. Decentralized Control System for Participation of Plug-in Electric Vehicles in the Load Frequency Control of a Microgrid. In Proceedings of the 2018 Power Systems Computation Conference (PSCC), Dublin, Ireland, 11–15 June 2018; Volume 20, p. 20. [Google Scholar] [CrossRef]
- Khan, M.; Sun, H.; Xiang, Y.; Shi, D.; Wang, Y. Robust Load Frequency Control and Integration of Electric Vehicles and Renewable Energy in the Grid. IET Conf. Publ. 2019, 2019, 5–10. [Google Scholar] [CrossRef]
- Pournazarian, B.; Karimyan, P.; Gharehpetian, G.B.; Abedi, M.; Pouresmaeil, E. Smart Participation of PHEVs in Controlling Voltage and Frequency of Island Microgrids. Int. J. Electr. Power Energy Syst. 2019, 110, 510–522. [Google Scholar] [CrossRef]
- Wang, X.; He, Z.Y.; Yang, J.W. Unified Strategy for Electric Vehicles Participate in Voltage and Frequency Regulation with Active Power in City Grid. IET Gener. Transm. Distrib. 2019, 13, 3281–3291. [Google Scholar] [CrossRef]
- Yang, J.; Dong, H.; Huang, Y.; Cai, L.; Gou, F.; He, Z. Coordinated Optimization of Vehicle-to-Grid Control and Load Frequency Control by Considering Statistical Properties of Active Power Imbalance. Int. Trans. Electr. Energy Syst. 2019, 29, 1–18. [Google Scholar] [CrossRef]
- Zecchino, A.; D’Arco, S.; Endegnanew, A.G.; Korpas, M.; Marinelli, M. Enhanced Primary Frequency Control from EVs: A Fleet Management Strategy to Mitigate Effects of Response Discreteness. IET Smart Grid 2019, 2, 436–444. [Google Scholar] [CrossRef]
- Alhelou, H.H.; Siano, P.; Tipaldi, M.; Iervolino, R.; Mahfoud, F. Primary Frequency Response Improvement in Interconnected Power Systems Using Electric Vehicle Virtual Power Plants. World Electr. Veh. J. 2020, 11, 1–13. [Google Scholar] [CrossRef]
- Gorostiza, F.S.; Gonzalez-Longatt, F.; Rueda, J.L. Multi-Objective Optimal Provision of Fast Frequency Response from EV Clusters. IET Gener. Transm. Distrib. 2020, 14, 5580–5587. [Google Scholar] [CrossRef]
- Scarabaggio, P.; Carli, R.; Cavone, G.; Dotoli, M. Smart Control Strategies for Primary Frequency Regulation through Electric Vehicles: A Battery Degradation Perspective. Energies 2020, 13, 4586. [Google Scholar] [CrossRef]
- Khalghani, M.R.; Solanki, J.; Khushalani Solanki, S.; Sargolzaei, A. Stochastic Secondary Frequency Control of Islanded Microgrid under Uncertainties. IEEE Syst. J. 2021, 15, 1056–1065. [Google Scholar] [CrossRef]
- Khan, M.; Sun, H.; Xiang, Y.; Shi, D. Electric Vehicles Participation in Load Frequency Control Based on Mixed H2/H∞. Int. J. Electr. Power Energy Syst. 2021, 125, 2020. [Google Scholar] [CrossRef]
- Shim, J.W.; Verbič, G.; Hur, K. Grid-Supportive Electric Vehicle Charging Methodology with Energy Management for Coordinated Frequency Control. IET Gener. Transm. Distrib. 2021, 15, 3474–3487. [Google Scholar] [CrossRef]
- Wang, Z.; Liu, Y.; Yang, Z.; Yang, W. Load Frequency Control of Multi-Region Interconnected Power Systems with Wind Power and Electric Vehicles Based on Sliding Mode Control. Energies 2021, 14, 2288. [Google Scholar] [CrossRef]
- Yoo, Y.; Al-Shawesh, Y.; Tchagang, A. Coordinated Control Strategy and Validation of Vehicle-to-Grid for Frequency Control. Energies 2021, 14, 2530. [Google Scholar] [CrossRef]
- Suh, J.; Song, S.; Jang, G. Power Imbalance-Based Droop Control for Vehicle to Grid in Primary Frequency Regulation. IET Gener. Transm. Distrib. 2022, 16, 3374–3383. [Google Scholar] [CrossRef]
- Torabi-Farsani, K.; Vafamand, N.; Razavi-Far, R.; Saif, M. Secure Frequency Regulation of Electric Vehicle-Connected Microgrid System under Multiple Latency Attacks. Comput. Electr. Eng. 2022, 101, 108008. [Google Scholar] [CrossRef]
- Almeida, P.M.R.; Soares, F.J.; Lopes, J.A.P. Electric Vehicles Contribution for Frequency Control with Inertial Emulation. Electr. Power Syst. Res. 2015, 127, 141–150. [Google Scholar] [CrossRef] [Green Version]
- Suul, J.A.; D’Arco, S.; Guidi, G. Virtual Synchronous Machine-Based Control of a Single-Phase Bi-Directional Battery Charger for Providing Vehicle-to-Grid Services. IEEE Trans. Ind. Appl. 2016, 52, 3234–3244. [Google Scholar] [CrossRef]
- Liu, D.; Zhong, Q.; Wang, Y.; Liu, G. Modeling and Control of a V2G Charging Station Based on Synchronverter Technology. CSEE J. Power Energy Syst. 2018, 4, 326–338. [Google Scholar] [CrossRef]
- Liu, D. Cluster Control for EVs Participating in Grid Frequency Regulation by Using Virtual Synchronous Machine with Optimized Parameters. Appl. Sci. 2019, 9, 1924. [Google Scholar] [CrossRef]
- Li, P.; Hu, W.; Xu, X.; Huang, Q.; Liu, Z.; Chen, Z. A Frequency Control Strategy of Electric Vehicles in Microgrid Using Virtual Synchronous Generator Control. Energy 2019, 189, 116389. [Google Scholar] [CrossRef]
- Dinkhah, S.; Negri, C.A.; He, M.; Bayne, S.B. V2G for Reliable Microgrid Operations: Voltage/Frequency Regulation with Virtual Inertia Emulation. In Proceedings of the 2019 IEEE Transportation Electrification Conference and Expo (ITEC), Detroit, MI, USA, 19–21 June 2019. [Google Scholar] [CrossRef]
- Dinkhah, S.; He, M. Self-Adjusting Inertia Emulation Control in V2G Application. In Proceedings of the 2020 IEEE Green Technologies Conference (GreenTech), Oklahoma City, OK, USA, 1–3 April 2020; pp. 127–132. [Google Scholar] [CrossRef]
- Khooban, M.H. An Optimal Non-Integer Model Predictive Virtual Inertia Control in Inverter-Based Modern AC Power Grids-Based V2G Technology. IEEE Trans. Energy Convers. 2021, 36, 1336–1346. [Google Scholar] [CrossRef]
- Singh, M.; Kumar, P.; Kar, I. Implementation of Vehicle to Grid Infrastructure Using Fuzzy Logic Controller. IEEE Trans. Smart Grid 2012, 3, 565–577. [Google Scholar] [CrossRef]
- Brenna, M.; Foiadelli, F.; Zaninelli, D. Voltage Sags Compensation through a DVR Supplied by V2G Vehicles Charging Stations. In Proceedings of the 2019 4th IEEE/PES Innovative Smart Grid Technologies Europe (ISGT-Europe), Bucharest, Romania, 29 September–2 October 2019; Volume 2013, pp. 1–5. [Google Scholar] [CrossRef]
- Hu, J.; Ye, C.; Ding, Y.; Tang, J.; Liu, S. A Distributed MPC to Exploit Reactive Power V2G for Real-Time Voltage Regulation in Distribution Networks. IEEE Trans. Smart Grid 2022, 13, 576–588. [Google Scholar] [CrossRef]
- Visioli, A. Research Trends for PID Controllers. Acta Polytech. 2012, 52, 144–150. [Google Scholar] [CrossRef]
- Raghu, N. Model Predictive Control: History and Development. Int. J. Eng. Trends Technol. 2013, 4, 2600–2602. [Google Scholar]
- Chang, W. Special Issue “Application of Fuzzy Control in Computational Intelligence”. Processes 2022, 10, 2522. [Google Scholar] [CrossRef]
- Wong, W.K.; Ming, C.I. A Review on Metaheuristic Algorithms: Recent Trends, Benchmarking and Applications. In Proceedings of the 2019 7th International Conference on Smart Computing & Communications (ICSCC), Sarawak, Malaysia, 28–30 June 2019. [Google Scholar] [CrossRef]
- Schöning, J.; Riechmann, A.; Pfisterer, H.J. AI for Closed-Loop Control Systems New Opportunities for Modeling, Designing, and Tuning Control Systems. In Proceedings of the 2022 14th International Conference on Machine Learning and Computing, Guangzhou China, 18–21 February 2022; Association for Computing Machinery: New York, NY, USA, 2022; Volume 1, pp. 318–323. [Google Scholar]
- Huang, Y.; Ru, Y.; Shen, Y.; Zeng, Z. Characteristics and Applications of Superconducting Magnetic Energy Storage. J. Phys. Conf. Ser. 2021, 2108, 012038. [Google Scholar] [CrossRef]
- Global Hydrogen Review 2022; OECD: Paris, France, 2022. [CrossRef]
- Viswanathan, V.; Mongird, K.; Franks, R.; Baxter, R. 2022 Grid Energy Storage Technology Cost and Performance Assessment; Pacific Northwest National Laboratory: Richland, WA, USA, 2022. [Google Scholar]
- Shi, Y.; Cheng, Y.; Gao, Y. A New Generation of Hardware-in-the-Loop Simulation Technology Combined with High-Performance Computers and Digital Twins. J. Phys. Conf. Ser. 2022, 2218, 012032. [Google Scholar] [CrossRef]
- Marketwise Solutions. Inertia Ancillary Service Market Options; Marketwise Solutions: Carmel, IN, USA, 2021; ISBN 7516648140. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Ref. | Year | Control | Benchmark | Remark | |
|---|---|---|---|---|---|
| [122] | 2012 | FLC-FVC | N/A. | Reducing spinning reserve, improving voltage regulation. | |
| [123] | 2012 | ADV2G | Without V2G. | Reducing spinning reserve. | |
| [125] | 2014 | RTSC | Without controller. | Optimized by genetic algorithm (GA) and involving the step of optimizing the size of renewable energy farms, applying real data from Florida City by PJM and minimizing the impact of the charging of PEVs relative to the grid. | |
| [126] | 2013 | BSH-CFR | 1. | Without V2G, ADV2G [123]. | Proposing the framework of the distributed V2G control (DVC). |
| [124] | 2017 | FLC | 2. | Without V2G, ADV2G [123]. | Tested using the IEEE 39-bus system: actual data from Victoria, Australia, were used. |
| [127] | 2017 | Frequency modulation | Without V2G. | Successfully reduced frequency deviations while maintaining the EV owner’s satisfaction level. | |
| [128] | 2018 | DPFRC | Autonomous distributed control (ADC). | Featuring a balanced objective to maintain frequency stability and battery SoC. | |
| [129,130] | 2018 2019 | ACE-ARR-based control | 1. | Area control error-based optimal approach (ACE-OA), area control error-based proportional approach (ACE-PA), area regulation requirement-based optimal approach (ARR-OA), area regulation requirement-based proportional approach (ARR-PA). | Proposing a hierarchical control framework; control centre, EV aggregators, and EV charging stations. |
| [131] | 2018 | Decentralised control | Droop control. | 90% SoC guarantee, featuring the suspension of charging when frequencies are too low. | |
| [132] | 2018 | GPA | Coordinated control strategy [133]. | Offering demand declaration strategy frameworks. | |
| [134] | 2019 | Decentralised V2G/G2V | N/A. | Proposing a two-way communication and energy flow architecture using real data from PJM. | |
| [135] | 2019 | SDV2G | 1. | Without V2G, droop control, BSH-CFR [126]. | Simulated in MATLAB environments; two conditions were applied: normal and worst condition. |
| Ref. | Year | Control | Optimization | Benchmark | Remark |
|---|---|---|---|---|---|
| [136,137,138] | 2017 | FO-PID | FPA | PID, PIDN. | Simulated in a three-area power system incorporated by both HVAC and HVDC transmission interconnections. |
| [139] | 2017 | Hebbian Learning-PID | N/A | PID, supervised Hebbian learning. | Incorporating the fluctuation of WPG. |
| [140] | 2018 | FO-PID | ICA | Hybrid gravitational search and pattern search (HyGS-PS) algorithm, differential evolution (DE). | Comparing optimization algorithms rather than comparing control strategies. |
| [141,142] | 2018 | FO-PID | SCA | PID-SCA, PID-PSO, FO-PID-PSO. | Simulated using MATLAB/Simulink, applying the delay scenario on EV’s aggregator side. |
| [86] | 2018 | PID | LOA | Without V2G. | Incorporating the FACTS device of UPFC. |
| [143] | 2019 | PID | JA | PID-GA, PID-PSO, PID-GWO. | Incorporating the fluctuation of WPG and PV. |
| [144] | 2019 | CC-TI-TD | WCA | PI, integral–tilt derivative (I-TD), CC-TI-TD without V2G. | Incorporating several scenarios: single-area, two-area, parameter variations, load variations, EV number variations, and communication delay. |
| [145] | 2019 | 2DOF-PIDN | VPLA | Without V2G. | Simulated in a three-area power system by applying constant and variable distributed energy systems (DESs). |
| [146] | 2019 | TID | ABCO | TID-PSO, TID-GA, TID. | Simulated in a two-area power system by applying step and random load changes and assessing the controller’s effectiveness by several control performance indicators (minimum damping ratio, peak overshoot, peak time, settling time, and ITSE). |
| [147] | 2020 | FO-PID | SSA | PID-PSO, PID-SSA, FO-PID-PSO. | Simulated in single-area and two-area power systems with two scenarios: single and multistep load changes. The control performance was monitored by using several indices: IAE, ITAE, and MAE. |
| [148] | 2020 | PID | MVO, SSA | Without V2G. | Incorporating two scenarios: step load change in area-1 and random load change in area-2. In addition, ISE performance indicators, such as settling time, rise time, overshoot, and undershoot, were captured. |
| [149] | 2020 | 2DOF-PID | WDO | PID, PI, integral (I). | Incorporating various scenarios: variations in the steady-state load, system inertia, and step load changes. Settling time, overshoot, and undershoot were used as performance measurements. |
| [150] | 2020 | CC-PI-PD | SSA | Integral (I), PI, PID, PI-PD-PSO, PI-PD GWO. | Implementing numerous scenarios: step load perturbation, random load perturbation, variation of inertia constant, damping constant, and droop constant. Measuring ISE and settling time as performance indicators. Equipped study with stability analysis. |
| [151] | 2020 | CC-PID | GWO | PI-GWO, PID-GWO, CPID-PSO, CPID-GA. | Evaluating overshoot, undershoot, and ITAE as the performance indicators. |
| [152] | 2020 | I+PD | WOA | PIDN-WOA. | Simulated using MATLAB/Simulink in two-area systems. |
| [153] | 2020 | CC-TID Filter 1+PI | MBA | Integral (I), PI. | Using OPAL-RT’s digital simulator. |
| [154] | 2021 | TIDN||HybFO | MPA | TIDN||HybFO-GA, TIDN||HybFO-MRFA, TIDN||HybFO-AEO, TIDN||HybFO. | Incorporating the scenarios of load changes, RES disorder, high-RES penetration, and system uncertainties. Applied ISE, IAE, ITSE, and ITAE as comparison parameters. |
| [155] | 2021 | PI | N/A | Without V2G. | Substantially fewer area control errors (ACEs) generated with V2G connected to the system. |
| [156] | 2021 | CC-FO-PI-FO-PD | SMA | PID-GA, PID-PSO, PID-SMA, FO-PID-GA, FO-PID-PSO, FO-PID-SMA, CC-FO-PI-FO-PD-GA, CC-FO-PI-FO-PD-PSO. | Incorporating the fluctuation of WPG and PV. |
| [157] | 2021 | CC-FOPI-FOPD | SCA | PI-GA, PI-SCA, PID-GA, PID-SCA, PI-PD-GA, PI-PD-SCA, FO-PI-FO-PD-GA, PI-PD-SCA. | Simulated in a three-area power system and used ITAE, overshoot, and undershoot for performance assessment. |
| [158] | 2021 | PID | MLCCA | N/A. | Monitoring the performance indicators, such as the minimum, maximum, average, and standard deviation, of the frequency. |
| [159] | 2021 | TIDN||HybFO | SMA | TIDN||HybFO-ALO, TIDN||HybFO-PSO, TIDN||HybFO. | Incorporating the fluctuation of WPG and PV. |
| [160] | 2021 | IDD | MBOA | Integral (I), ID, PI, PID, IDD-BBO, IDD-FA, IDD-PSO, IDD-GA, IDD-fuzzy. | Incorporating variations in solar irradiance. |
| [161] | 2021 | CC-ID-PD | MBOA | PID-MBOA, PIID-MBOA, PIDD-MBOA, CC-PD-ID-MBOA. | Implementing the demerit index (DI), which is the sum square value of the minimum overshoot (MO), minimum undershoot (MU), and time of settling (ToS), as the performance indicator. |
| [162] | 2021 | PI-DD | GWO | PIDN, PID, PI. | Incorporating AC–DC lines. |
| [163] | 2021 | TID | ASO | TID-ASO, TID-GOA, TID-SSA, TID-GWO, TID-SCA, TID-PSO. | Applying various scenarios such as random load disturbance (RLD), sinusoidal load disturbance (SLD), and pulse load disturbance (PLD). Assessing the performance indicator of overshoot, undershoot, and ITSE. |
| [164] | 2021 | CC-3DOF-PID-FO-PID | SCA | FO-PID-SCA. | Simulated by MATLAB/Simulink in a four-area power system. Measuring overshoot, undershoot, and settling time as the performance indicators. |
| [165] | 2021 | PID | PSO-ANN | CPID, FPID. | Involving several scenarios: variations in load, wind, and battery’s state of health (SoH). |
| [166] | 2021 | SO-IDD | MBOA | ID, PID, IDD. | Using the demerit index (DI), which is the sum square value of the minimum overshoot (MO), minimum undershoot (MU), and time of settling (ToS), as the performance indicator. |
| [167] | 2021 | PI | FA | I-FA. | Implementing the scenarios of step load disturbances (SLDs) and random load disturbances (RLDs). Monitoring settling time, overshoot, and undershoot as performance indicators. |
| [168] | 2021 | FO-PI | ANN | PI, FO-PI. | Simulated in a three-area power system by evaluating settling time and overshoot as the performance indicators. |
| [169] | 2022 | PID | QO-WOA | Incorporate superconducting magnetic energy storage (SMES). | |
| [170] | 2022 | CFC | QO-LOA | PID-BBO. | Incorporating superconducting magnetic energy storage (SMES). |
| [171] | 2022 | DR-PI | SSA | PI, PID. | |
| [172] | 2022 | PD-N Plus (1+PI) | ADE | PID-DE, PID-ADE. | Incorporating OPAL-RT and incorporating the fluctuation of WPG and PV. |
| [173] | 2022 | T-FO-ID-FN | AHA | PIDN, TIDN, FO-PIDN, FO-TIDN, T-FO-ID-FN-ABC, T-FO-ID-FN-BOA, T-FO-ID-FN-AEO, T-FO-ID-FN-PSO. | Incorporating fluctuation of WPG and PV. |
| [174] | 2022 | FO-PID | SOA | PIDD-SOA, PID-SOA, PI-SOA. | Incorporating superconducting magnetic energy storage (SMES). |
| [175] | 2022 | CC-2DOF-PI-PDN | OVPLA | 2DOF(PI)-PDN-PSO, 2DOF(PI)-PDN-WOA, 2DOF(PI)-PDN-VPLA, 2DOF(PI)-PDN-OVPLA, integral-OHS, PID-BBO, 2DOF-TIDN-HSSDEA, PDF(1+FOD)-SSA. | Incorporating HVDC. |
| [176] | 2022 | FO-PID | DEPSO | PID-DEPSO. | Incorporating HVDC. |
| [177] | 2022 | FO-PID | N/A | PID, PD without PHEV, PI without PHEV, PID without PHEV, FO-PID without PHEV. | Simulated on a two-area system and applied ITAE as the control performance index. |
| Ref. | Year | Control | Optimization | Benchmark | Remark |
|---|---|---|---|---|---|
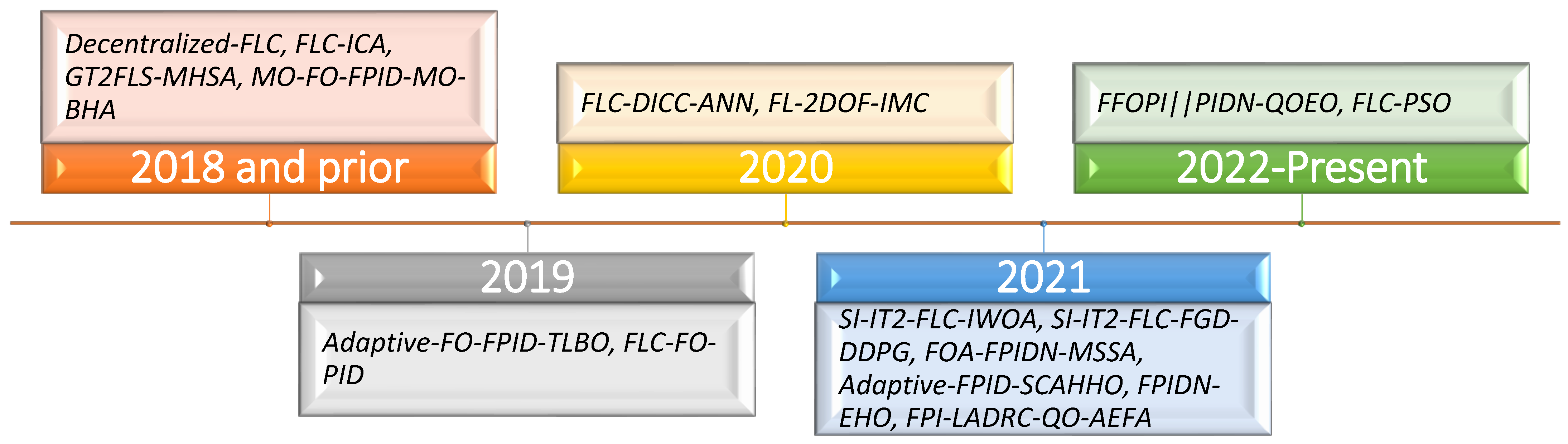
| [178] | 2015 | Decentralized-FLC | N/A | Without V2G. | |
| [179,180] | 2016 | FLC | ICA | H2/H∞-PSO [181], PI-ICA. | Tested using IEEE-39 Bus. |
| [182,183] | 2016 | GT2FLS | MHSA | Optimal fuzzy PI (OFPI), optimal interval type II fuzzy-PI (IT2FPI), PID, FPID. | Incorporating the fluctuation of WPG. |
| [184] | 2017 | PFLC | N/A | FLC. | Tested with several scenarios with a sudden increase/decrease in wind speed VW, load demand, and solar radiation φ, and a linear increase in φ. Minimal-order observer method was applied to estimate the supply error. |
| [185] | 2018 | MO-FO-FPID | MO-BHA | Multiobjective-PID (MO-PID), multiobjective-FPI (MO-FPI), multiobjective-IT2-FLC (MO-IT2-FLC). | Incorporating the fluctuation of WPG and PV and incorporating hardware-in-the-loop (HIL) simulations. |
| [186] | 2019 | Adaptive-FO-FPID | TLBO | PID- TLBO, FO-PID- TLBO, FPID, FO-FLC-PID. | Incorporating the fluctuation of WPG and PV. |
| [187] | 2019 | FLC-FO-PID | PID, FO-PID. | ||
| [188] | 2020 | FLC-DICC | ANN | FLC. | Using data from Guwahati City collected from a regional power distributor provided by Assam Power Distribution Company Limited (APDCL), using ANN for forecasting and integrity check, proposing a 2-layer framework: data integrity and correction check block in the first layer and an FLC in the second layer. |
| [189] | 2020 | FL-2DOF--IMC | Nonadaptive TDF-IMC. | Incorporating the fluctuation of WPG. | |
| [190] | 2021 | SI-IT2-FLC | IWOA | T1-FPD/FPI, PD/PI. | Adopting a hardware-in-the-loop (HIL) simulator. |
| [191] | 2020 | SI-IT2-FLC | FGD-DDPG | FGD-SIT2-FPID, GD-SIT2-FPID, A-SIT2-FPID, S-SIT2-FPID, T1-FPID, and PID. | Incorporating real-time setup (RTS) space for results verification. |
| [192] | 2021 | FOA-FPIDN | MSSA | PI, PI-GA, PI-BFOA, PI-PSO, hBFOA-PSO, PI-NSGA-II, PIDN-NSGA-II, fuzzy PI-PS, fuzzy PI-PSO. | Incorporating variations of PV and WPG. |
| [193] | 2021 | Adaptive FPID | SCAHHO | PI, PI-GA, PI-BFOA, PI-PSO, hBFOA-PSO, PI-NSGA-II, PIDN-NSGA-II, fuzzy PI-PS, fuzzy PI-PSO, AFPID-MMFO. | Using OPAL-RT’s digital simulator, involving the modern elements of a hybrid power system (HPS); ultracapacitor (UC), super magnetic energy storage (SMES), and fuel energy storage (FES). |
| [194] | 2021 | FPIDN | EHO | PI, PID, PIDN. | Incorporating modern devices: unified power flow controller (UPFC), interline power flow controller (IPFC), fuel cells (FC), redox flow batteries (RFB), and superconducting magnetic energy storage (SMES). |
| [195] | 2021 | FPI- LADRC | QO-AEFA | Integral (I), PI, PID, PIDN, FPI, LADRC, PID-BBO. | Involving fluctuation of PV and WPG. |
| [196] | 2022 | FFOPI||PIDN | QOEO | FFOPI||PIDN-WOA, FFOPI||PIDN-EO, FFOPI||PIDN-OEO, an optimal output feedback controller, integral-OHS. | Incorporating HVDC, considering variables SPV and WPG, and incorporating Bode plot analyses in the design phase. |
| [197] | 2022 | FLC | PSO | N/A. | Applying two scenarios (normal and abnormal) while using the performance evaluation of the maximum frequency deviation, average frequency deviation, frequency regulation generator cost, frequency regulation EV cost, and restoration time. |
| Ref. | Year | Control | Optimization | Benchmark | Remark |
|---|---|---|---|---|---|
| [198] | 2015 | MMPC | QP | PID, MPC. | Applying several cases of SoC (30%, 50%, 65%, and 79%). |
| [199] | 2015 | MGPC | QP | PI, FLC. | The prediction was performed by the controlled autoregressive and integrated moving average (CARIMA) model. |
| [200,201] | 2018 | DMPC | PID, CMPC. | ||
| [202] | 2019 | GPC | Rolling optimization | PI. | CARIMA was used as a predictive model, incorporating a controllable load. |
| [203,204] | 2019 | MPC | PI, PID. | Using ITAE, IAE, and ISE as performance evaluation. | |
| [205] | 2021 | LQR-RMPC | N/A | Type-II fuzzy-PID, MPC, PID, fuzzy. | Applying scenarios of wind disturbance, load disturbance, parameter uncertainties, and islanded microgrid operation. |
| [206] | 2022 | AI-MPC | SCA | PID, adaptive fuzzy MPC. | Simulated various scenarios: single load perturbation (SLP), random load perturbation (RLP), wind/solar PV variation, and parameter uncertainties. Assessing the sum of the squared errors (SSEs) and mean of the squared errors (MSEs). |
| Ref. | Year | Strategy | Optimization | Benchmark Strategy | Remark |
|---|---|---|---|---|---|
| [207,210] | 2014 | GrADP | N/A | PI, FLC, FLC-PSO. | Incorporating the scenario with EV constraints and communication delay. |
| [181] | 2014 | H2/H∞ | PSO | Autonomous distributed V2G control [123], PI. | Using IAE as a performance indicator. |
| [133] | 2014 | CCS | N/A | Without V2G. | Simulated in a two-area power system and using the scenarios of step and random load variations. |
| [208] | 2015 | SLC | N/A | Without V2G. | Incorporating hardware design, incorporating an analysis using the region of asymptotical stability (RAS), using IEEE Case 3 and IEEE New England. |
| [209] | 2015 | FRC-EV2G based control | N/A | Without V2G. | Improvement of [126], proposing the framework of supplementary frequency regulation (SFR) with V2G. |
| [211] | 2016 | CPN -based control | N/A | FRC-EV2G-based control [209]. | Reducing frequency fluctuations, using actual data from PJM-ERCOT, proposing a framework comprising power generation, transmission, and substations. |
| [212] | 2016 | DFO | N/A | Open loop, optimal state feedback, LRO. | Incorporating HVDC link. |
| [213] | 2017 | ADC | CPA | N/A. | Investigated by scenario with respect to positive and negative changes in frequency. |
| [214] | 2017 | FDC | N/A | N/A. | The design process incorporates a Bode plot and eigenvalue analysis. |
| [215] | 2017 | OISM | NN | PID. | A neural network observer was designed to predict the PV power disturbance. |
| [216] | 2017 | NN-ASMC | N/A | PI, SMC. | Investigated by the scenario of load and parameter variation. |
| [217] | 2017 | HC-DV2G | N/A | Without V2G, FLC. | Two levels of control; lower-level controller is a local (decentralized) fuzzy controller for each parked PEV, and the upper-level controller is a centralized coordinate of the power flow in the entire grid. |
| [218] | 2018 | DCC | N/A | Centralised cooperative control. | |
| [55] | 2018 | MFNL-SMC | MBHA | PID, fuzzy-PID, MPC. | Involving HiL real-time simulation. |
| [219] | 2018 | AMFR | N/A | Without V2G. | No control centre, simulated using IEEE 14 bus system. |
| [220] | 2018 | MAS | ACA | N/A. | Investigated by the scenario of load variations and time delay. |
| [221] | 2019 | H2/H∞ | LMI | N/A. | Incorporating the fluctuation of WPG and PV. |
| [222] | 2019 | IDC | ANFIS | Droop control, ODC. | Involving control of voltage, simulated using a 14-bus test MG. |
| [223] | 2019 | UVF | N/A | Without V2G. | Involving control of voltage. |
| [224] | 2019 | COVC | PSO | DVC [209], without V2G. | Incorporating a hierarchical distributed control framework. |
| [225] | 2019 | SFMS | N/A | N/A. | Involving power hardware-in-the-loop (P-HiL) experiments. |
| [226] | 2020 | GSC | N/A | Droop control. | Using Great Britain data as a case study. |
| [227] | 2020 | EFRAM | NSGA-II | N/A. | Using a reduced model of the Nordic power system. |
| [228] | 2020 | BoCo-LoDeCo | N/A | El-Co, Ba-Co, Sm-Ch-Co, Bo-Co. | |
| [229] | 2021 | SUIO | LQR | UIO-LQR, Luenberger observer-LQR. | Incorporating the fluctuation of WPG and PV. |
| [230] | 2021 | H2/H∞ -SOF | LMI | H∞-SOF. | Simulated using various scenarios: single-area/three-area power system and step/random load variations. Monitoring the parameters of ISE, mean absolute error (MAE), mean squared error (MSE), and standard deviation as performance indicators. |
| [231] | 2021 | FRSM | N/A | Without FRSM. | Using the Jeju Island power network as a case study. |
| [232] | 2021 | SMC | LMI | PID. | |
| [233] | 2021 | CCA | N/A | N/A. | Incorporating power hardware-in-the-loop (PHIL) simulation. |
| [234] | 2022 | PI-DC | N/A | Droop control. | Incorporating real data from PJM. |
| [235] | 2022 | Robust (mixed) Μ-synthesis | N/A | FLC, H∞, μ-synthesis, mixed-μ controller. | Incorporating the fluctuation of WPG and PV. |
| Ref. | Year | Strategy | Optimization | Benchmark | Remark |
|---|---|---|---|---|---|
| [236] | 2015 | Inertial emulation-droop control | N/A | Droop control, inertial emulation. | |
| [237] | 2016 | VSM | N/A | N/A. | Applying the scenario of step load changes and sudden islanding. |
| [238] | 2018 | Synchronverter | N/A | N/A. | Proposing T-S fuzzy control for stipulating the reference charging power, the frequency drooping coefficient is calculated using an adaptive algorithm. |
| [239] | 2019 | VSM | MO-PSO | N/A. | |
| [240] | 2019 | Two-stage control | N/A | Integral control. | Applying the scenario of both grid-connected and islanded operations. |
| [241] | 2019 | Droop-virtual inertia controller | N/A | N/A. | Using an OPAL-RT simulator involving faults such as a disturbance scenario and incorporating PV fluctuations. |
| [242] | 2020 | Self-adjusting inertia emulation control | N/A | Droop-virtual inertia controller [241]. | |
| [243] | 2021 | Noninteger MPC | IWOA | MPC, model-free SMC. | Involving real-time simulations based on dSPACE hardware and incorporating the fluctuation of WPG and PV. |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pradana, A.; Haque, M.; Nadarajah, M. Control Strategies of Electric Vehicles Participating in Ancillary Services: A Comprehensive Review. Energies 2023, 16, 1782. https://doi.org/10.3390/en16041782
Pradana A, Haque M, Nadarajah M. Control Strategies of Electric Vehicles Participating in Ancillary Services: A Comprehensive Review. Energies. 2023; 16(4):1782. https://doi.org/10.3390/en16041782
Chicago/Turabian StylePradana, Adlan, Mejbaul Haque, and Mithulanathan Nadarajah. 2023. "Control Strategies of Electric Vehicles Participating in Ancillary Services: A Comprehensive Review" Energies 16, no. 4: 1782. https://doi.org/10.3390/en16041782