
A Study on the Improved Power Control Algorithm for a 100 kW Wind Turbine
 , ,
, ,  and
and
Abstract
:1. Introduction
2. Design of Power Compensation Control Algorithm
2.1. Target Wind Turbine (Wind Rose 100 kW)
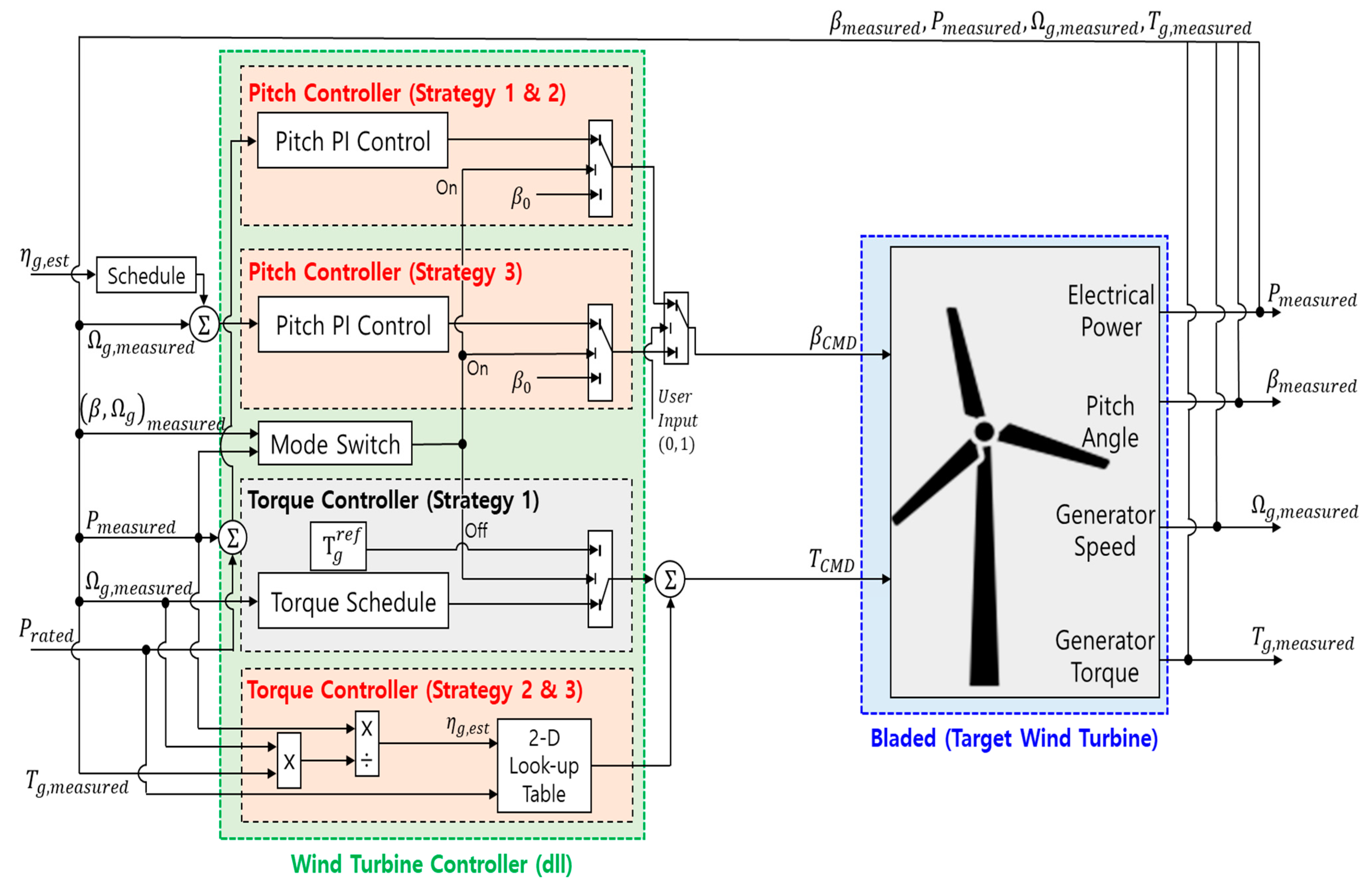
2.2. Control Algorithm
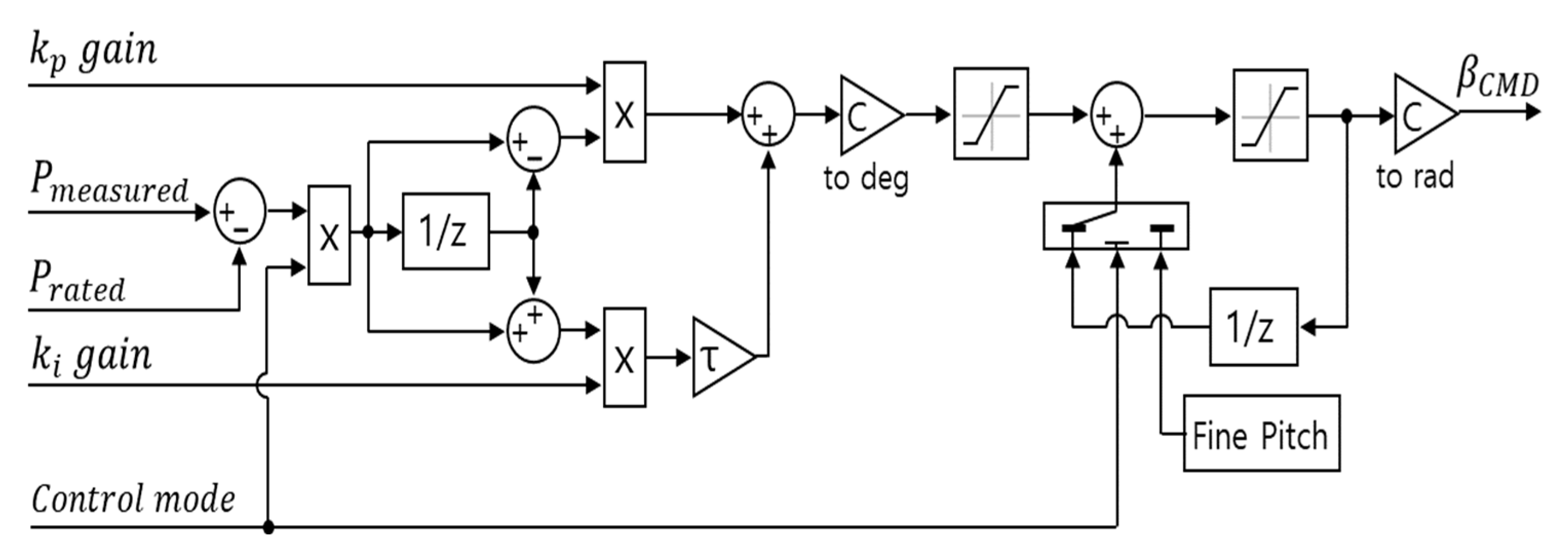
2.3. Strategy 1—Power Feedback PI Control Algorithm (Pitch Control)
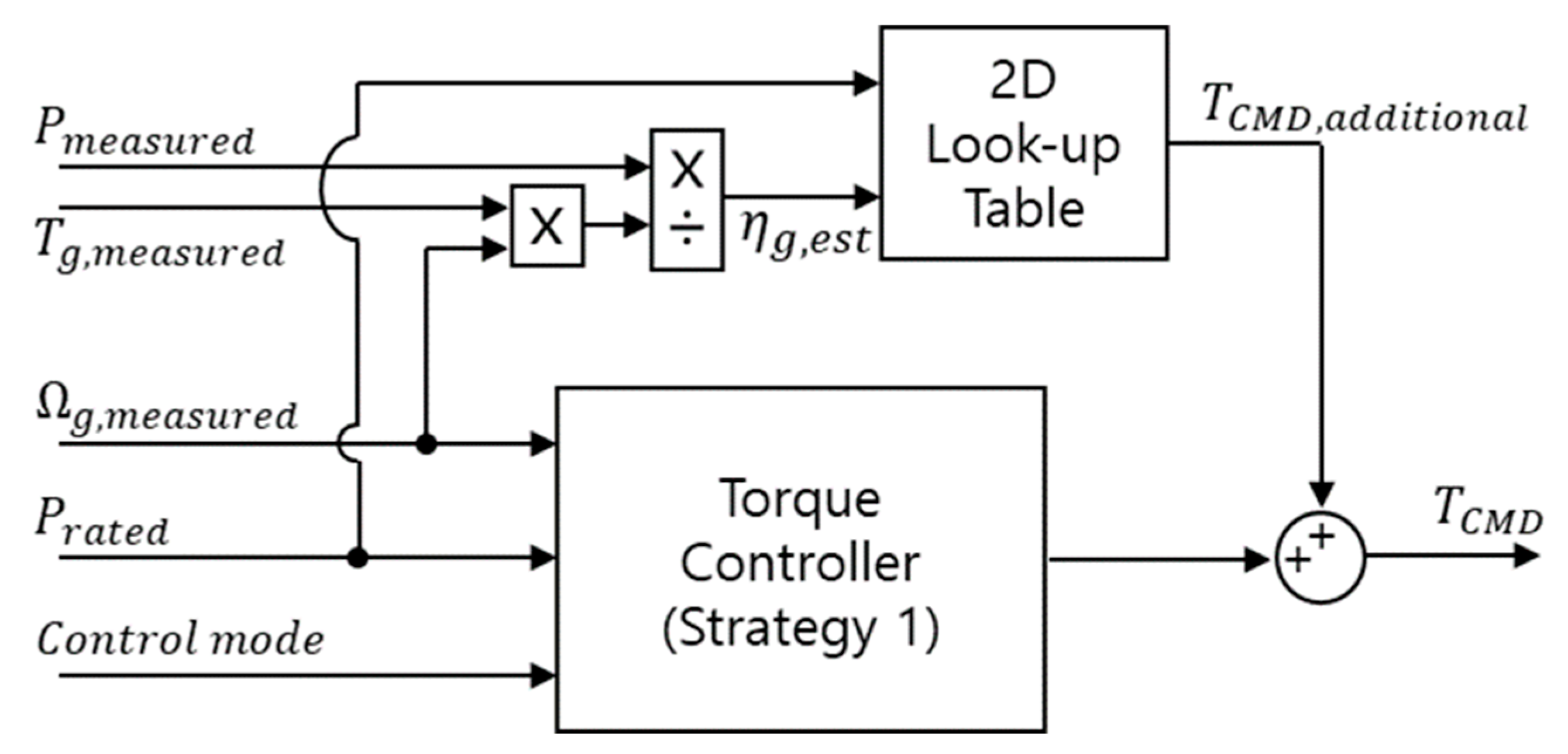
2.4. Strategy 2—Power Feedback Torque Compensation Algorithm (Torque Control)
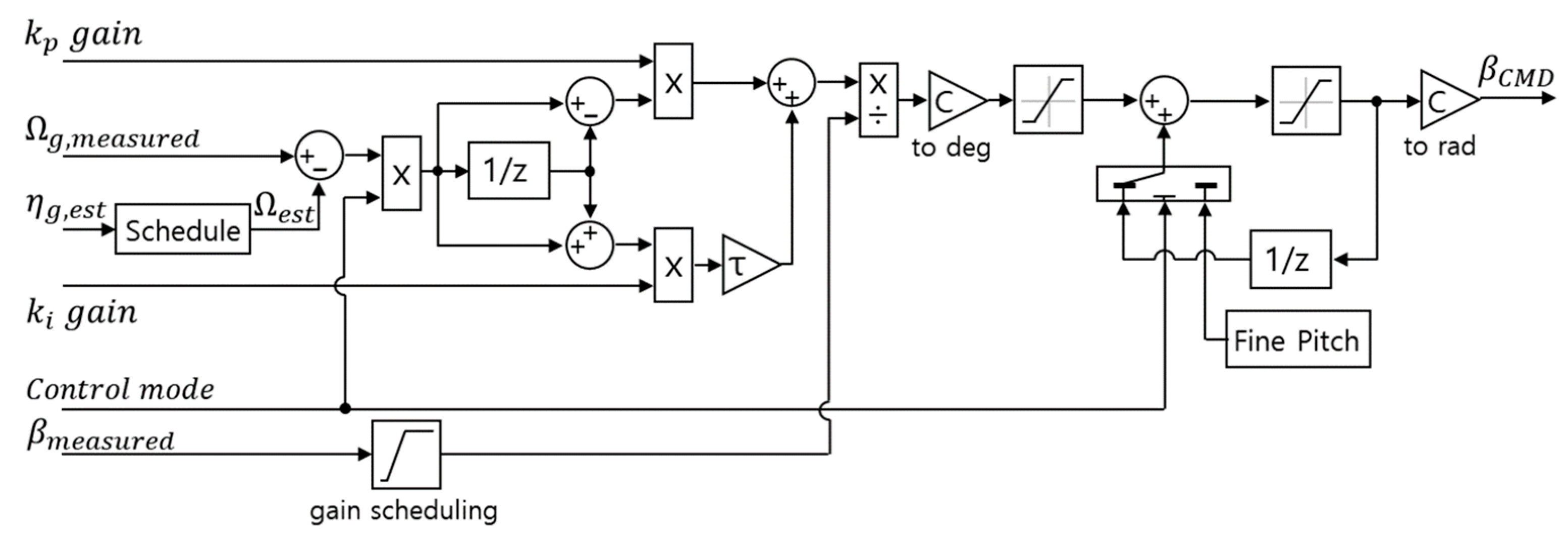
2.5. Strategy 3—Estimated Generator Speed PI Control Algorithm (Pitch Control)
3. Validation of Control Algorithm
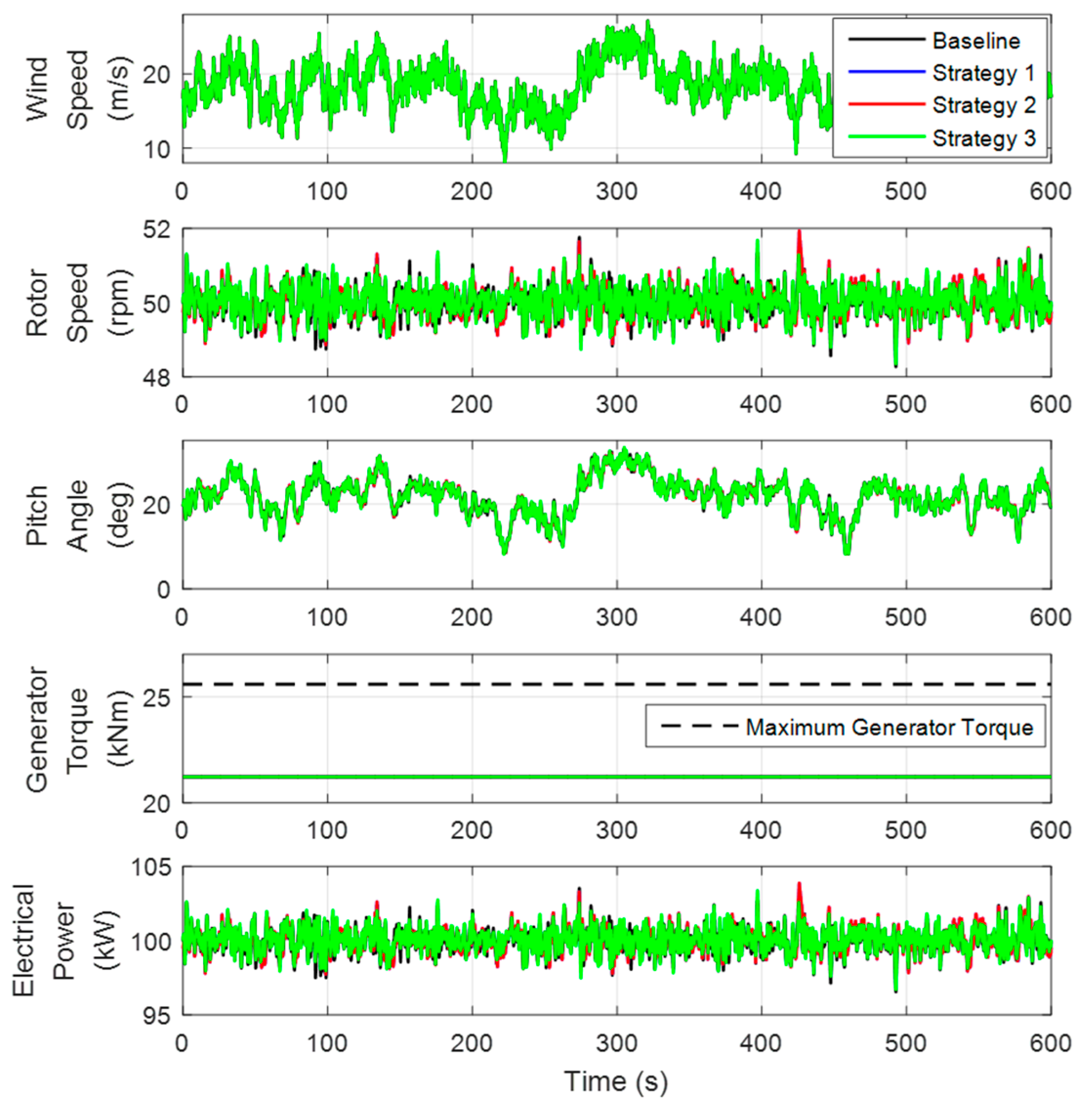
3.1. Simulation Results for Normal Condition (without Additional Generator Loss)
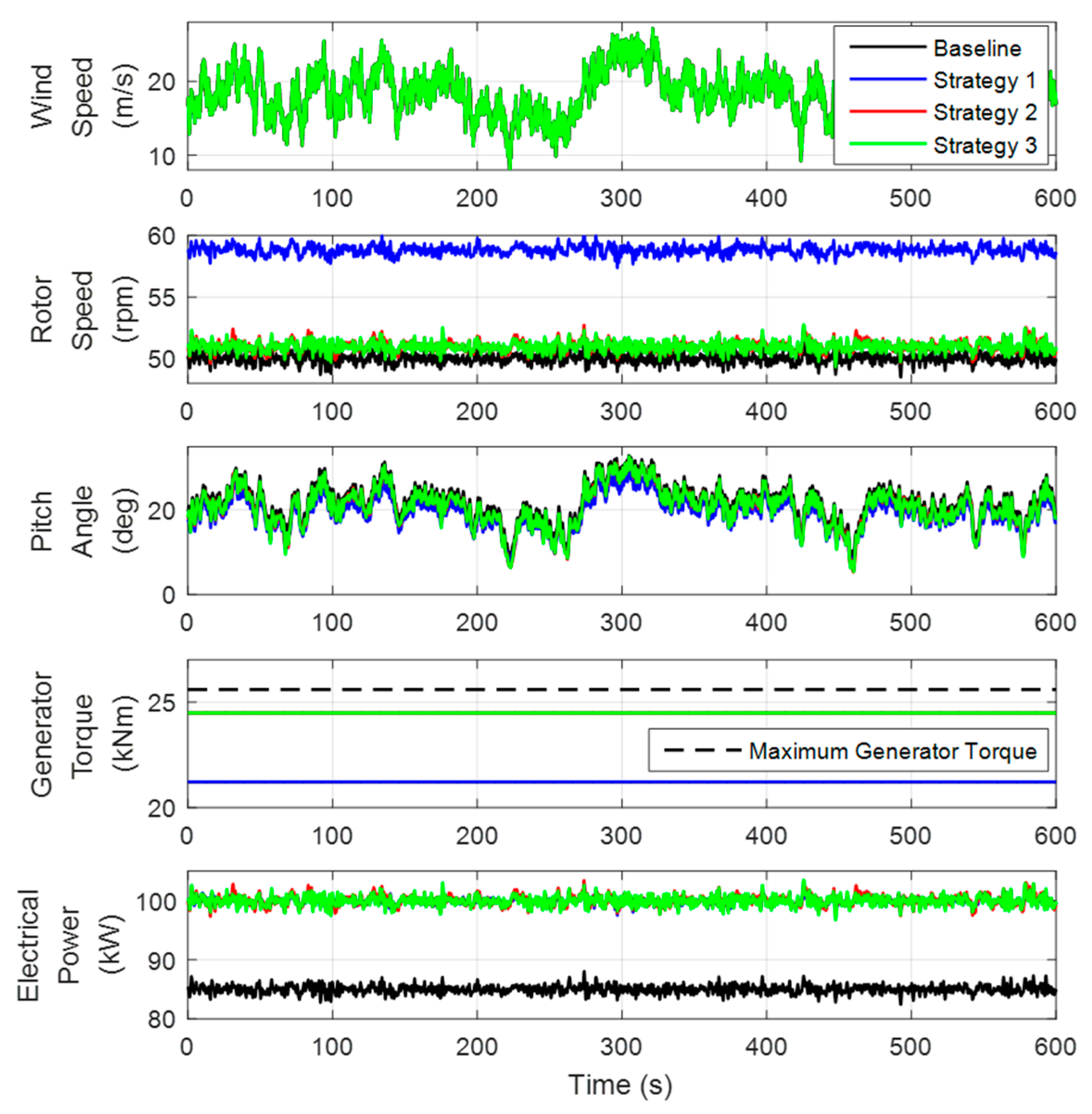
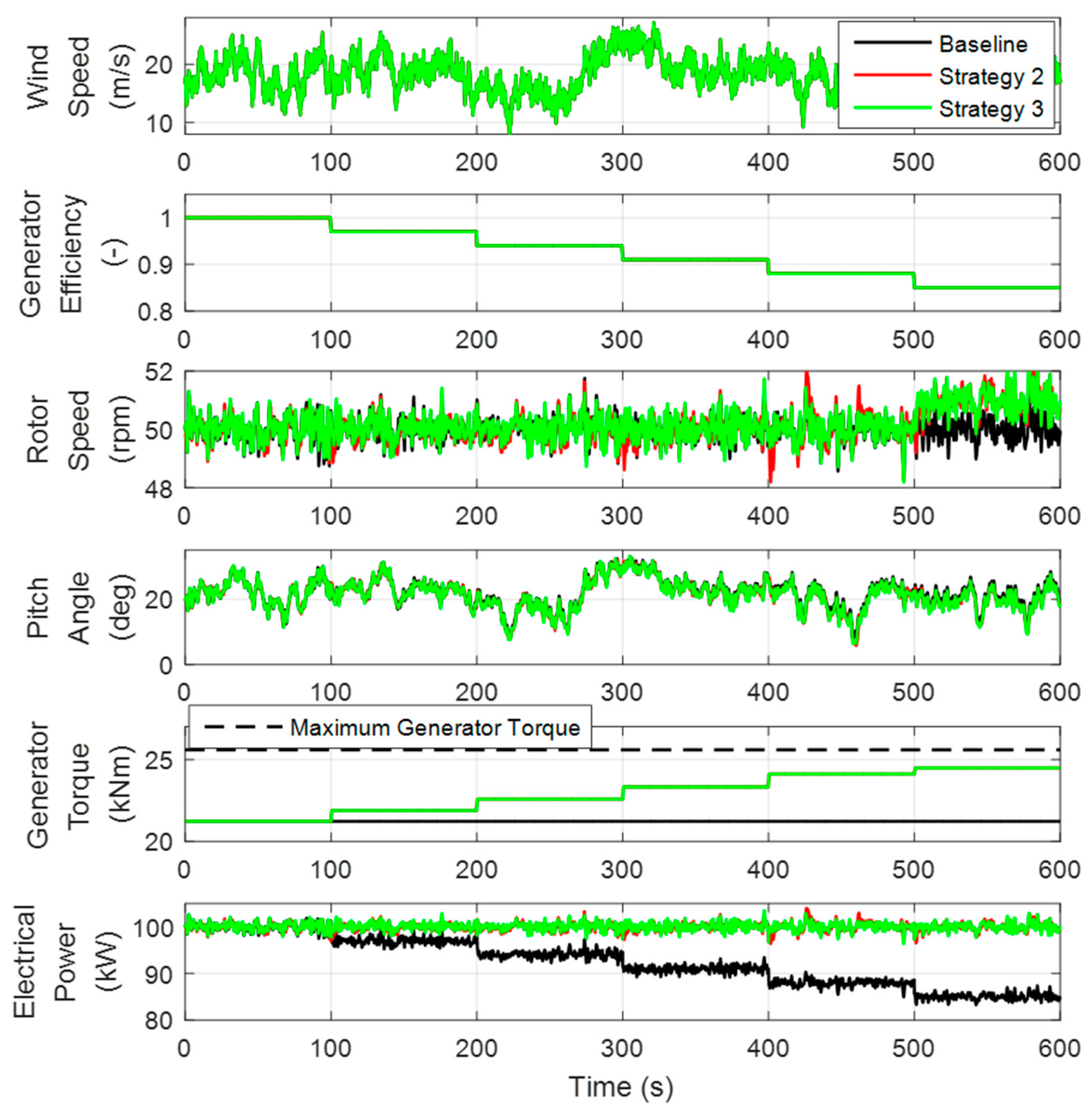
3.2. Simulation Results for Unusual Condition (with Additional Generator Loss)
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Nomenclature
| NTM | Normal Turbulence Model |
| MPPT | Maximum Power Point Tracking |
| PLC | Programmable Logic Controller |
| PI | Proportional Integral |
| DLL | Dynamic Linking Library |
| Symbols | |
| Proportional gain | |
| Integral gain | |
| Differences between rated and measured generator speeds | |
| Differences between rated and measured powers | |
| Electrical power | |
| Generator torque | |
| Generator speed | |
| Generator loss | |
| Generator torque command | |
| Generator torque command for original torque controller | |
| Additional generator torque command for power compensation | |
| Estimated generator loss | |
| Measured power | |
| Measured generator torque | |
| Measured generator speed |
References
- Global Wind Energy Council. GWEC|Global Wind Report 2022; Global Wind Energy Council: Brussels, Belgium, 2022. [Google Scholar]
- Bossanyi, E.A. The design of closed loop controllers for wind turbines. Wind Energy 2000, 3, 149–163. [Google Scholar] [CrossRef]
- Nam, Y. Wind Turbine System Control, 1st ed.; GS Intervision: Seoul, Korea, 2013. [Google Scholar]
- Bossanyi, E.A. Wind turbine control for load reduction. Wind Energy 2003, 6, 229–244. [Google Scholar] [CrossRef]
- Kim, K.; Kim, H.; Paek, I. Application and validation of peak shaving to improve performance of a 100 kW wind turbine. Int. J. Precis. Eng. Manuf. Green Technol. 2020, 7, 411–421. [Google Scholar] [CrossRef]
- Kim, C.; Kim, K.; Paek, I. Design of tower damper gain scheduling algorithm for wind turbine tower load reduction. J. Korean Sol. Energy Soc. 2018, 38, 1–13. [Google Scholar] [CrossRef]
- Bossanyi, E. Individual blade pitch control for load reduction. Wind. Energy 2003, 6, 119–128. [Google Scholar] [CrossRef]
- Kim, C.; Kim, K.; Song, Y.; Paek, I. Tower Load Reduction Control by Pitch Loop Individual Gain Scheduling. J. Wind. Energy 2018, 9, 25–32. [Google Scholar]
- Stammler, M.; Thomas, P.; Reuter, A.; Schwack, F.; Poll, G. Effect of load reduction mechanisms on loads and blade bearing movements of wind turbines. Wind. Energy 2019, 23, 274–290. [Google Scholar] [CrossRef] [Green Version]
- Selvam, K.; Kanev, S.; van Wingerden, J.W.; van Engelen, T.; Vergaegen, M. Feedback-feedforward individual pitch control for wind turbine load reduction. Int. J. Robust Nonlinear Control 2008, 130, 72–91. [Google Scholar] [CrossRef] [Green Version]
- Nam, Y.; Kim, J.; Paek, I.; Moon, Y.; Kim, S.; Kim, D. Feedforward Pitch Control Using Wind Speed Estimation. J. Power Electron. 2011, 11, 211–217. [Google Scholar] [CrossRef] [Green Version]
- Wang, N.; Johnson, K.E.; Wright, A.D. FX-RLS-based feedforward control for LIDAR-enabled wind turbine load mitigation. IEEE Trans. Control Syst. Technol. 2012, 20, 1212–1222. [Google Scholar] [CrossRef]
- Bao, J.; Yue, H.; Leithead, W.E.; Wang, J.Q. Feedforward control for wind turbine load reduction with pseudo-LIDAR measurement. Int. J. Autom. Comput. 2018, 15, 142–155. [Google Scholar] [CrossRef]
- Pitteloud, J.; Gsänger, S. 2017 Small Wind World Report; Technical Report; World Wind Energy Association: Bonn, Germany, 2017. [Google Scholar]
- Gözcü, O.; Kim, T.; Verelst, D.R.; McWilliam, M.K. Swept Blade Dynamic Investigations for a 100 kW Small Wind Turbine. Energies 2022, 15, 3005. [Google Scholar] [CrossRef]
- Siram, O.; Kesharwani, N.; Sahoo, N.; Saha, U.K. Aerodynamic Design and Wind Tunnel Tests of Small-scale Horizontal-axis Wind Turbines for Low Tip Speed Ratio Applications. J. Sol. Energy Eng. 2022, 144, 041009. [Google Scholar] [CrossRef]
- Fleck, B.; Huot, M. Comparative life-cycle assessment of a small wind turbine for residential off-grid use. Renew. Energy 2009, 34, 2688–2696. [Google Scholar]
- Tummala, A.; Velamati, R.K.; Sinha, D.K.; Indraja, V.; Krishna, V.H. A review on small scale wind turbines. Renew. Sustain. Energy Rev. 2016, 56, 1351–1371. [Google Scholar] [CrossRef]
- Kim, K.; Kim, H.; Paek, I.; Kim, H.; Son, J. Field Validation of Demanded Power Point Tracking Control Algorithm for Medium-Capacity Wind Turbine. Int. J. Precis. Eng. Manuf. Green Technol. 2019, 6, 875–881. [Google Scholar] [CrossRef]
- Castaignet, D.; Barlas, T.; Buhl, T.; Poulsen, N.; Wedel-Heinen, J.; Olesen, N.; Bak, C.; Kim, T. Full-scale test of trailing edge flaps on a Vestas V27 wind turbine: Active load reduction and system identification. Wind. Energy 2014, 17, 549–564. [Google Scholar] [CrossRef]
- Fuskele, V.; Baredar, P.; Sarviya, R.M.; Lal, S.; Awasthi, S. Wind turbine nacelle cooling systems: A review. Wiley Interdiscip. Rev. Energy Environ. 2022, 11, e456. [Google Scholar] [CrossRef]
- Jiang, Y. Wind turbine cooling technologies. Wind. Power Gener. Wind. Turbine Des. 2010, 44, 613–640. [Google Scholar]
- Taras, P.; Nilifard, R.; Zhu, Z.Q.; Azar, Z. Cooling Techniques in Direct-Drive Generators for Wind Power Application. Energies 2022, 15, 5986. [Google Scholar] [CrossRef]
- Vidal, Y.; Acho, L.; Luo, N.; Zapateiro, M.; Pozo, F. Power control design for variable-speed wind turbines. Energies 2012, 5, 3033–3050. [Google Scholar] [CrossRef]
- Hawari, Q.; Kim, T.; Ward, C.; Fleming, J. A robust gain scheduling method for a PI collective pitch controller of multi-MW onshore wind turbines. Renew. Energy 2022, 192, 443–455. [Google Scholar] [CrossRef]
- Ren, Y.; Li, L.; Brindley, J.; Jiang, L. Nonlinear PI control for variable pitch wind turbine. Control Eng. Pract. 2016, 50 (Suppl. C), 84–94. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Specifications | Unit | Value |
|---|---|---|
| Wind Turbine Type | - | HAWT, VSVP, Upwind |
| Rated Power | W | 100,000 |
| Rotor Diameter | m | 24.4 |
| Hub Height | m | 30, 36 |
| Rated Wind Speed | m/s | 10 |
| Rated Rotor Speed | rpm | 50 |
| Fine Pitch Angle | deg | −0.8 |
| Optimal Tip Speed Ratio | - | 7.3 |
| Max-Cp | - | 0.45 |
| Gear Ratio | - | 1:1 |
| Conditions (Additional Generator Loss) | Rotor Speed (rpm, %) | |||
|---|---|---|---|---|
| Mean | Error | Std. | Error | |
| Baseline (0%) | 50.00 | - | 0.386 | - |
| Strategy 1 (0%) | 50.02 | 0.04 | 0.388 | 0.52 |
| Strategy 2 (0%) | 50.02 | 0.04 | 0.389 | 0.78 |
| Strategy 3 (0%) | 50.04 | 0.08 | 0.386 | 0.00 |
| Conditions (Generator Efficiency) | Electrical Power (kW, %) | |||
|---|---|---|---|---|
| Mean | Error | Std. | Error | |
| Baseline (0%) | 100.00 | - | 0.772 | - |
| Strategy 1 (0%) | 100.04 | 0.04 | 0.776 | 0.52 |
| Strategy 2 (0%) | 100.04 | 0.04 | 0.777 | 0.65 |
| Strategy 3 (0%) | 100.07 | 0.07 | 0.772 | 0.00 |
| Conditions (Generator Efficiency) | Rotor Speed (rpm, %) | |||
|---|---|---|---|---|
| Mean | Error | Std. | Error | |
| Baseline (0%) | 50.00 | - | 0.386 | - |
| Baseline (15%) | 50.00 | 0 | 0.385 | −0.26 |
| Strategy 1 (15%) | 58.80 | 17.60 | 0.360 | −6.74 |
| Strategy 2 (15%) | 51.00 | 2.00 | 0.418 | 8.29 |
| Strategy 3 (15%) | 50.95 | 1.90 | 0.406 | 5.18 |
| Conditions (Generator Efficiency) | Electrical Power (kW, %) | |||
|---|---|---|---|---|
| Mean | Error | Std. | Error | |
| Baseline (0%) | 100.00 | - | 0.772 | - |
| Baseline (15%) | 85.00 | −15.00 | 0.655 | −15.16 |
| Strategy 1 (15%) | 99.96 | −0.04 | 0.613 | −20.60 |
| Strategy 2 (15%) | 100.03 | 0.03 | 0.821 | 6.35 |
| Strategy 3 (15%) | 99.95 | −0.05 | 0.797 | 3.24 |
| Section | Conditions | Rotor Speed (rpm, %) | |||
|---|---|---|---|---|---|
| Mean | Error | Std. | Error | ||
| 0~100 s (0%) | Baseline | 49.99 | - | 0.433 | - |
| Strategy 2 | 50.01 | 0.04 | 0.391 | −9.70 | |
| Strategy 3 | 50.03 | 0.08 | 0.423 | −2.31 | |
| ~200 s (3%) | Baseline | 49.99 | 0 | 0.343 | −20.79 |
| Strategy 2 | 49.99 | 0 | 0.347 | −19.86 | |
| Strategy 3 | 50.04 | 0.10 | 0.341 | −21.25 | |
| ~300 s (6%) | Baseline | 50.03 | 0.08 | 0.388 | −10.39 |
| Strategy 2 | 50.00 | 0.02 | 0.406 | −6.24 | |
| Strategy 3 | 50.04 | 0.10 | 0.399 | −7.85 | |
| ~400 s (9%) | Baseline | 49.99 | 0.00 | 0.356 | −17.78 |
| Strategy 2 | 49.99 | 0 | 0.348 | −19.63 | |
| Strategy 3 | 50.05 | 0.12 | 0.395 | −8.78 | |
| ~500 s (12%) | Baseline | 49.97 | −0.04 | 0.393 | −9.24 |
| Strategy 2 | 50.01 | 0.04 | 0.550 | 27.02 | |
| Strategy 3 | 50.00 | 0.02 | 0.415 | −4.16 | |
| ~600 s (15%) | Baseline | 50.02 | 0.06 | 0.394 | −9.01 |
| Strategy 2 | 50.96 | 1.94 | 0.462 | 6.70 | |
| Strategy 3 | 50.95 | 1.92 | 0.431 | −0.46 | |
| Section | Conditions | Electrical Power (kW, %) | |||
|---|---|---|---|---|---|
| Mean | Error | Std. | Error | ||
| 0~100 s (0%) | Baseline | 99.99 | - | 0.865 | - |
| Strategy 2 | 100.02 | 0.03 | 0.872 | 0.81 | |
| Strategy 3 | 100.07 | 0.08 | 0.846 | −2.20 | |
| ~200 s (3%) | Baseline | 96.98 | −3.01 | 0.665 | −23.12 |
| Strategy 2 | 99.97 | −0.02 | 0.699 | −19.19 | |
| Strategy 3 | 100.09 | 0.10 | 0.683 | −21.04 | |
| ~300 s (6%) | Baseline | 94.06 | −5.93 | 0.728 | −15.84 |
| Strategy 2 | 100.01 | 0.02 | 0.809 | −6.47 | |
| Strategy 3 | 100.08 | 0.09 | 0.796 | −7.98 | |
| ~400 s (9%) | Baseline | 90.98 | −9.01 | 0.649 | −24.97 |
| Strategy 2 | 99.99 | 0 | 0.698 | −19.31 | |
| Strategy 3 | 100.10 | 0.11 | 0.792 | −8.44 | |
| ~500 s (12%) | Baseline | 87.96 | −12.03 | 0.691 | −20.12 |
| Strategy 2 | 100.03 | 0.04 | 1.102 | 27.40 | |
| Strategy 3 | 100.00 | 0.01 | 0.833 | −3.70 | |
| ~600 s (15%) | Baseline | 85.03 | 14.96 | 0.669 | −22.66 |
| Strategy 2 | 99.95 | −0.04 | 0.908 | 4.97 | |
| Strategy 3 | 99.94 | −0.05 | 0.848 | −1.97 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kim, D.; Jeon, T.; Paek, I.; Roynarin, W.; Plangklang, B.; Dugarjav, B. A Study on the Improved Power Control Algorithm for a 100 kW Wind Turbine. Energies 2023, 16, 619. https://doi.org/10.3390/en16020619
Kim D, Jeon T, Paek I, Roynarin W, Plangklang B, Dugarjav B. A Study on the Improved Power Control Algorithm for a 100 kW Wind Turbine. Energies. 2023; 16(2):619. https://doi.org/10.3390/en16020619
Chicago/Turabian StyleKim, Dongmyoung, Taesu Jeon, Insu Paek, Wirachai Roynarin, Boonyang Plangklang, and Bayasgalan Dugarjav. 2023. "A Study on the Improved Power Control Algorithm for a 100 kW Wind Turbine" Energies 16, no. 2: 619. https://doi.org/10.3390/en16020619