
A Survey on Hybrid SCADA/WAMS State Estimation Methodologies in Electric Power Transmission Systems

{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
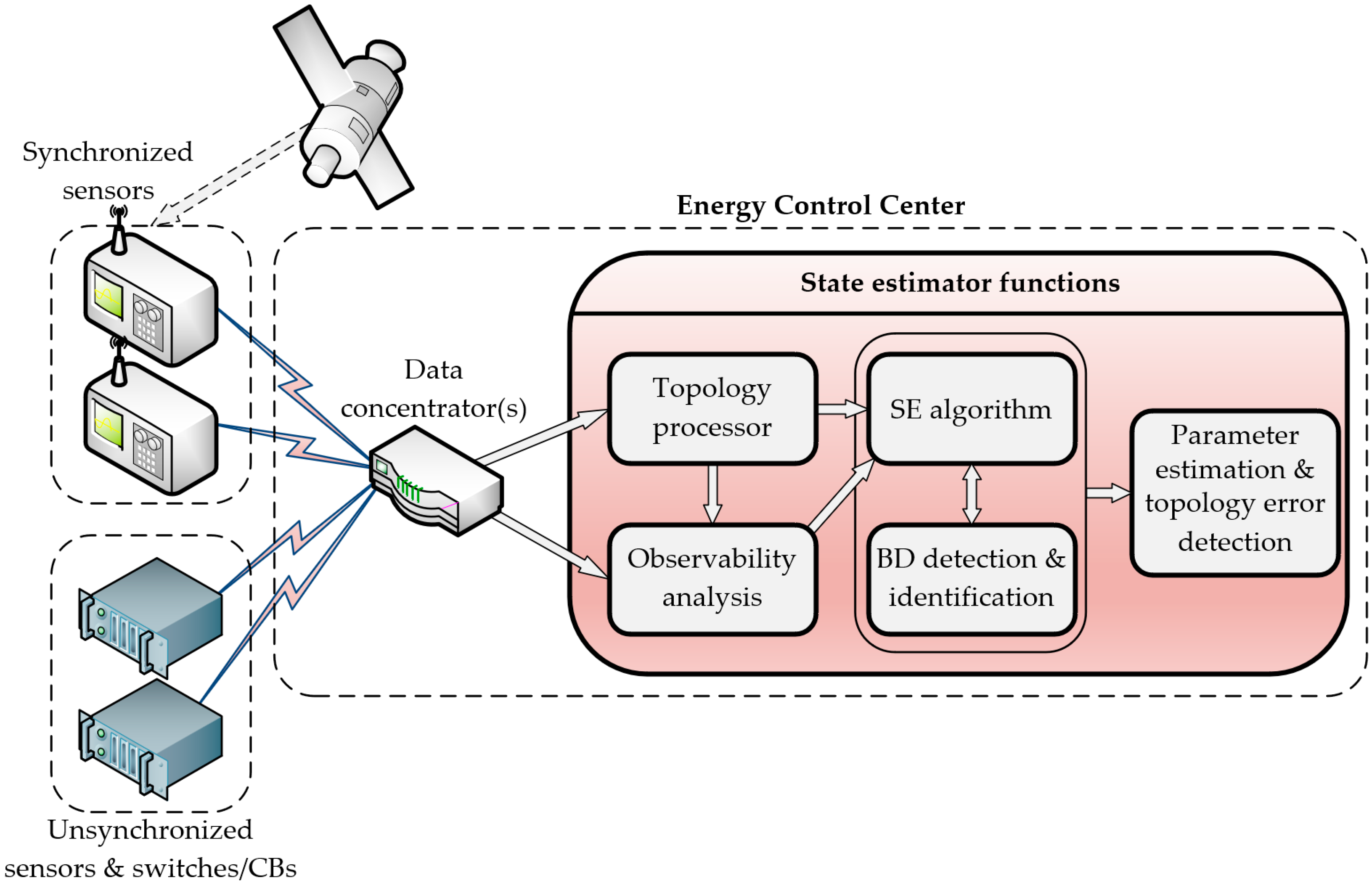
- Topology processor: the status of switches and circuit breakers are processed to determine the current network topology.
- Observability analysis: the observability of the system for executing SE is verified by analyzing accrued field measurements. In the case of insufficient measurement redundancy, full observability of the network is not achieved; thus, observable islands must be detected for the execution of SE, or observability is reinstated using pseudo-measurements.
- SE algorithm: an optimization process that utilizes the aggregated real-time measurements in a certain time frame and provides the estimated state of the network. The random noise (due to instrument transformers, communication errors, limited meter accuracy etc.) intrinsically existing in field data is filtered out; then, these data are used to calculate the most probable operating state of the power system.
- Bad Data (BD) detection and identification: an algorithm that enables detection, identification, and elimination of gross measurements in the dataset, based on the statistical properties of measurements. Depending on the employed SE algorithm, this step may be integrated directly into the estimation process, or it can be a post-processing step; in the latter case, if BD are detected and eliminated, the SE process is repeated.
- Topology error identification and system parameter estimation: similar to the process of handling BD, the SE results are analyzed to diagnose errors in the assumed network topology due to erroneous reporting of switching component states. Finally, parameter estimation is executed to extract the updated (most probable) values of network parameters based on the SE solution.
- The quality of the state estimates is significantly improved, owing to the high measurement accuracy of PMUs (0.1% for magnitudes, 0.001 rad for phase angles [4]). This aspect provides operators with greater confidence in the system conditions and reliable data for downstream control functions in the EMS.
- PMUs directly measure the system states, i.e., bus voltage phasors, hence simplifying the mathematical formulation of the SE problem into a linear one.
- Measurement synchronization is crucial for obtaining accurate snapshots of the estimated system operating conditions in different areas. Leveraging the absolute GPS-dictated time reference is decisive for achieving an overall and detailed picture of the operating state of the network.
- PMUs offer superfast measurement reporting rates (~100 times faster than RTUs), which is important for tracking the trajectory of the system states, above all in scenarios characterized by high dynamics.
2. State Estimation under Sensor Diversity
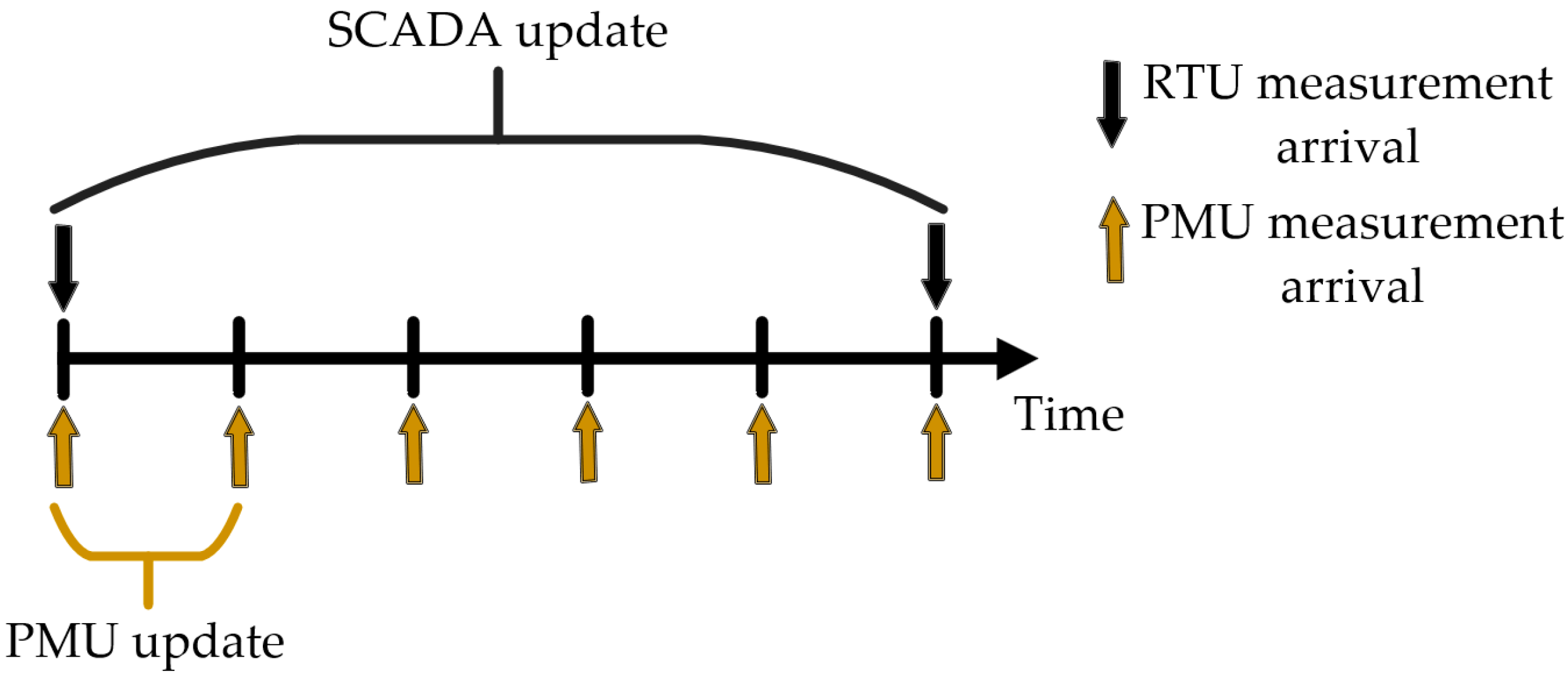
- Different sensor reporting rates and time-inconsistent data. The first aspect is that PMU measurements are updated at a much higher rate than RTU measurements. Furthermore, there is no coordinated timing of measurement arrivals between different data sources, referred to as the asynchronization or time-skew problem, which indicates that the field measurements will likely not form a dataset captured at an exact time instance. Apart from the uncoordinated timestamping of RTU data, time inconsistencies also occur due to different communication delays among sensors [12,13].
- Different types and accuracy levels of measured quantities. The measured quantities provided by RTUs and PMUs are different, which leads to challenges in practical implementations, as existing SE software needs to be modified. Numerical problems may also arise at flat start involving current phasor measurements, when these are expressed in polar coordinates [14]. Different accuracy levels between sensor types have an impact on the choice of appropriate measurement weights, which in turn negatively affects SE convergence in case of excessively diverse values [15].
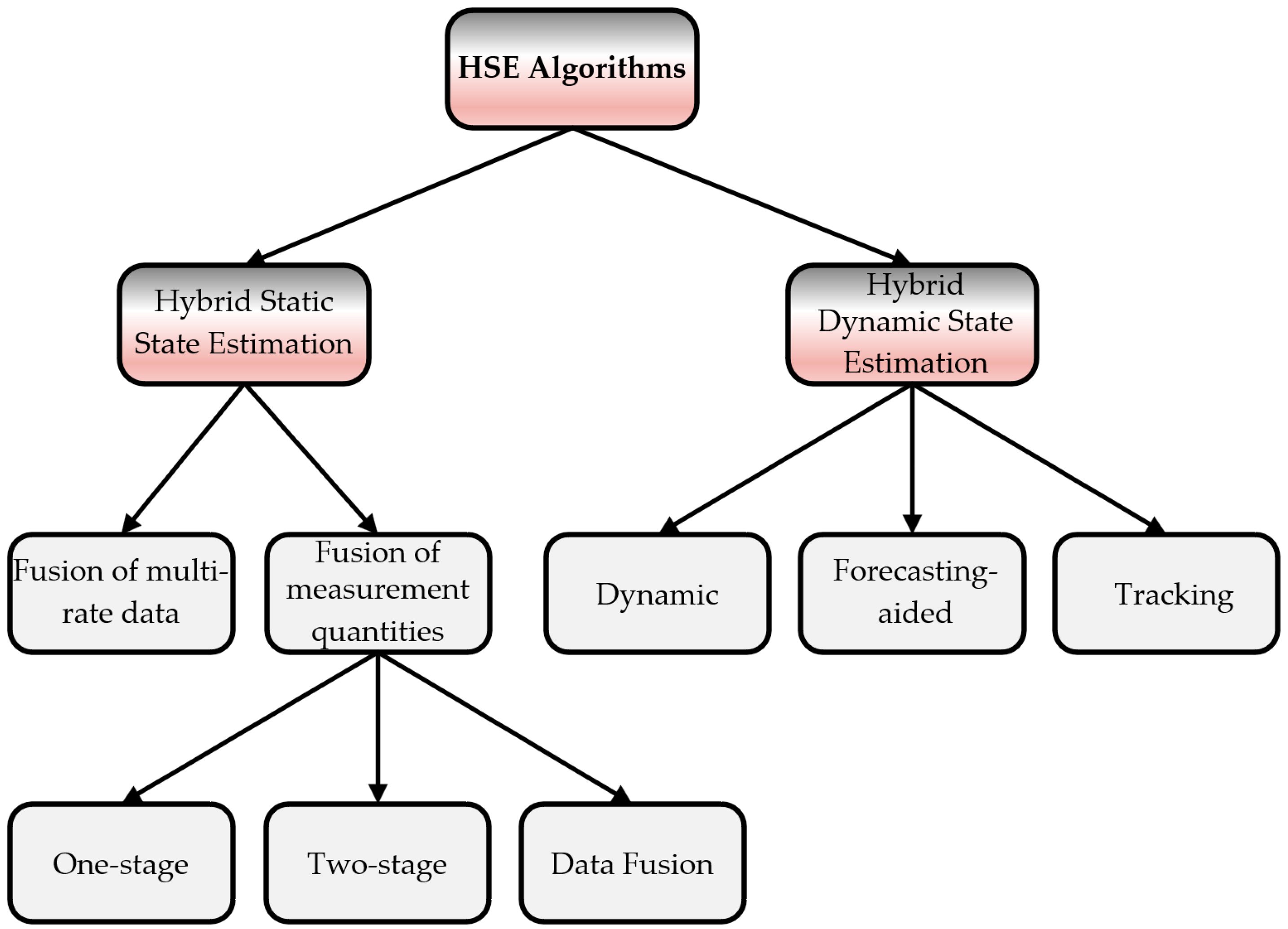
3. Hybrid Static State Estimation
3.1. Fusion of Asynchronous and Multi-Rate Data
3.1.1. State/Measurement Reconstruction
3.1.2. Measurement Buffering
3.1.3. Summary
3.2. Fusion of Different Measured Quantities
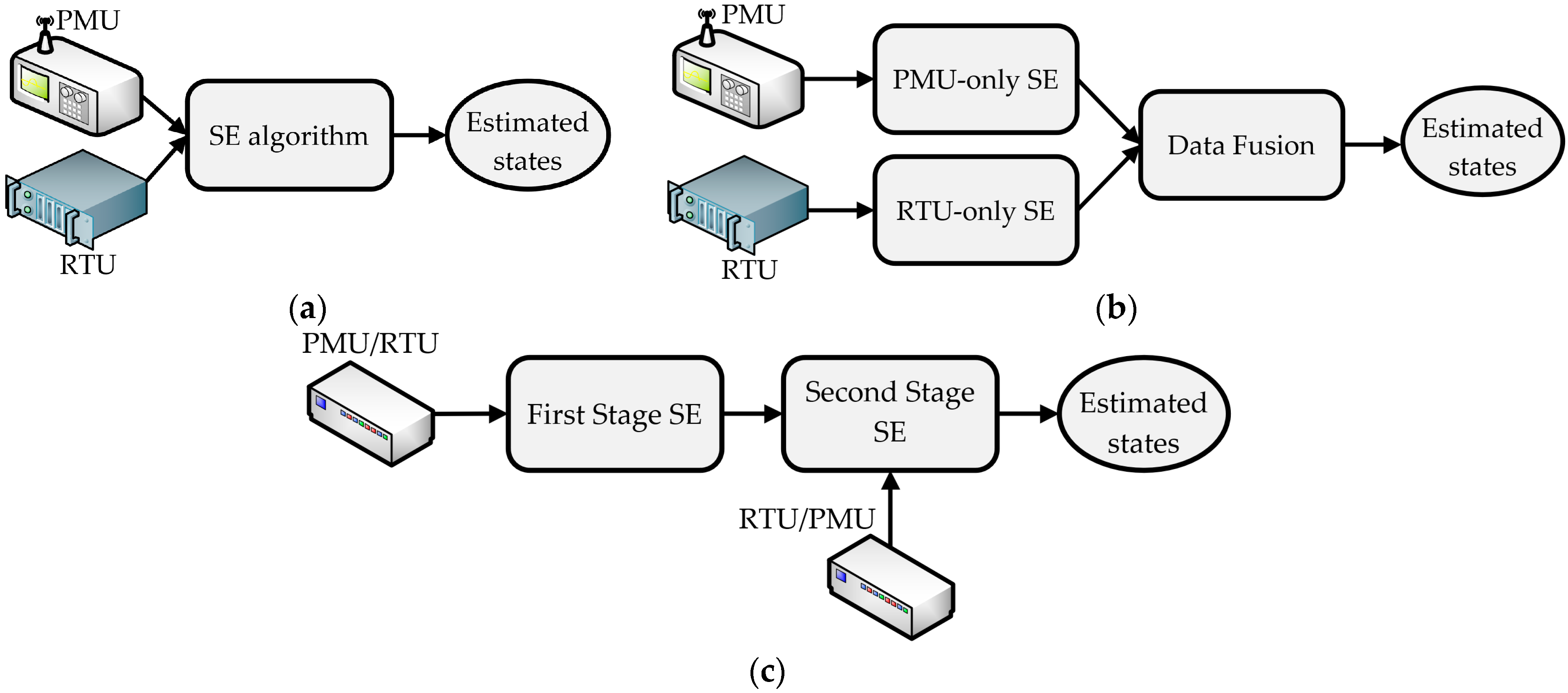
3.2.1. One-Stage HSSE Methods
- Linear models: Work [33] proposes converting all power measurements into equivalent current phasors, resulting in the formulation of a linear iterative WLS-based HSSE. The Jacobian and gain matrices remain constant during the iterative process, consequently improving SE execution times. In a similar fashion, [34] proposes an estimator based on the non-iterative linear equality-constrained WLS approach by transforming RTU-measured quantities into voltages and currents expressed in rectangular form, while equality constraints are used to model zero injections. A study in [35] proposes a fully linear robust LAV-based HSSE, which is solved non-iteratively using linear programming. Reference [36] introduces a linear robust HSSE, employing a Schweppe-type M-estimator with Huber loss function. The method of Iteratively Reweighted Least Squares (IRLS) is used to maximize the likelihood function in the M-estimator. In [37], the authors propose two LAV-based robust HSSE methods, both leveraging linear measurement models. The first method is based on the linear LAV approach and is formulated as a single linear programming problem, while the second builds upon an alternative LAV-based estimator that can be solved by gradient-based methods. In [38], a linear Equivalent Circuit Formulation (ECF) of the power system is derived by relating power flows/injections to bus voltage and branch current phasors. Both RTU and PMU measurement models are expressed using linear circuits; thus, the estimated state is obtained by solving a linear set of optimality conditions. In [39], the authors further enhance ECF for practical implementations by including circuit models for all possible combinations of RTU measurements, null injections, and the possibility of having no measurements at a bus.
- Multi-area: Work [40] proposes a decentralized multi-area HSSE, by first implementing a PMU-only SE concerning area boundary buses and then introducing the boundary bus state estimates as equality constraints imposed upon the local SE of each area. Similarly, [41] introduces a decentralized method, which enables exploiting the computation capability of each subarea to solve for a global state vector in parallel via the Gossip-based Gauss-Newton algorithm. The robustness of the proposed scheme is achieved by dynamically adjusting the measurement weights based on the measurement quality to suppress the influence of BD on the SE solution. In [42], the authors propose a multi-area HSSE based on a fully distributed Gauss-Newton method, in which each area carries out the SE locally and independently, relying on local measurements and limited communication with neighboring areas. Alternatively, [43] proposes an iterative multi-area HSSE approach, in which all subareas run their SE sequentially in each iteration, and the problem of area slack bus angle referencing in case of insufficient PMUs is tackled using pseudo-measurements derived from the SE solution of boundary buses.
- Complex variables: Various papers have also addressed the solution of the SE problem in the complex domain, which is also proven to be computationally advantageous. Publication [44] first presents an implementation of the WLS-based HSSE problem in complex variables by employing the complex Taylor series expansion, which is based on Wirtinger calculus. It is worth noting that current measurements do not require any special handling, unlike HSSE implementations over the real domain. In [45], the complex normal equations of [44] are expanded to incorporate equality constraints. Finally, [46] proposes a constant gain matrix method utilizing the perturbed Gauss-Newton method for nonlinear least-squares formulated in the complex domain as in [44].
3.2.2. Two-Stage HSSE Methods
3.2.3. Fusion HSSE Methods
3.2.4. Summary
4. Hybrid Dynamic State Estimation
4.1. DSE Methods
4.2. FASE Methods
4.3. TSE Methods
4.4. Summary
5. Discussion
- Numerical stability and convergence: For OSHSSE formulations, attention has been mainly given to issues such as estimation optimality and computational performance. However, diverse accuracy classes of sensors, and widely differing measurement values, may result in poor SE convergence under direct RTU and PMU measurement fusion. Recent research has proven that decoupling the SE formulations of SCADA and WAMS in TSHSSE and FHSSE architectures offers the benefits of improved numerical stability and good convergence properties. Optimality of the estimated states, communication load, parallelization and observability are issues that arise with these methods. Future works on HSE should also cover the effect of PMU measurements on systems with insufficient redundancy levels in traditional measurements and systems that are observable only under both SCADA and WAMS measurements.
- Diverse reporting rates: The issue of multi-rate RTU and PMU measurement fusion is taken into consideration in numerous proposed approaches. However, the effect of measurement time-skew and observability with respect to PMU measurements on the quality of the SE results should be investigated further. Uncoordinated SCADA scans and individual asynchronous measurements (e.g., from FACTS controllers, DERs, etc.) may still not arrive periodically, as is usually assumed in the literature. Therefore, the case of SE under unsynchronized multi-rate/multi-sensor measurement infrastructure should be investigated further, in order to develop implementable SE algorithms. Possible solutions would be to implement HSE methods that consider estimation fusion without any assumptions on sensor reporting rates or utilizing buffering techniques and treating asynchronous and low-rate data as a statistical trend that enhances real-time SE. Groundwork on this research has been recently laid in [89,90] under the concepts of extreme learning machines and Bayesian SE, respectively.
- Robustness: With respect to BD and cyberattack resilience, further investigation in BD detection and identification methods is needed, especially for practical implementations of TSHSSE and FHSSE. Future works should consider more realistic modeling of the communication networks and HSE algorithms that are robust against missing, corrupted, or even deliberately altered measurements [91]. By examining recent literature, one can infer that the utilization of machine learning-based or forecasting-aided SE methods could provide acceptable SE solutions by mitigating the effect of such anomalies in the measurement network. Most inherently robust non-WLS SE approaches (e.g., [19,32]) involve a trade-off between computational efficiency and accuracy/convergence/BD resilience. Practical implementations of such methods need to be addressed in future work, and ways for them to possibly complement existing WLS algorithms should be investigated further [92,93,94].
- Performance: SE performance also becomes a crucial factor for fully exploiting high-rate PMU data between SCADA scans. In the face of the increasing complexity of modern power systems, the need to optimize SE algorithms for large-scale systems arises, especially when considering HDSE techniques could be vital to fast control actions. This has led to the implementation of distributed HSE methods, which provide accuracy comparable to centralized HSE methods while significantly enhancing SE performance by solving subarea SE problems in parallel. Such performance enhancements are of utmost importance for the real-time implementation of HSE in the ECC and should thus concern future publications [95,96]. Interarea communication and information exchange between boundary buses is a topic that should be expanded upon in future research, particularly in the case of missing measurements or BD and the unobservability of subareas. It would also be interesting to investigate employing distributed algorithms for handling BD in such SE methods.
- Measurement model: Improvements in the HSE measurement model could also concern future publications. The measurement noise statistics are usually unknown or time-varying, an issue that is accentuated in the presence of multiple data sources. The assumptions pertaining to the statistical properties of measurements (noise Gaussianity and uncorrelatedness) should be alleviated in future work, expanding upon the research in [97,98,99]. Furthermore, network modeling also emerges as an issue, with wide integration of FACTS, HVDC, and DERs that need to be included accordingly in the measurement model and considered in the parameter estimation step. Mathematical formulations for different combinations of system components and measurement data need to be derived, to broaden the current SE modeling framework.
- State transition models: Future work on DSE should focus on more accurate and detailed state transition models. In order to obtain reliable state estimates for dynamic systems, state prediction and filtering should be robust against the various uncertainties inherently present in the power system, possibly using pattern recognition which could capture the effects of stochastic components, such as DERs. Multi-area, numerically robust and efficient data-driven DSE methods also comprise fruitful approaches that deserve further investigation [100,101]. Considering that the accuracy of PMUs is reduced during transient conditions, it is also imperative to test and validate DSE methods with real field data and assess their real-time accuracy and performance under such circumstances. It is worth noting that already existing static state estimators could benefit significantly in terms of accuracy and convergence by incorporating a simple state space model, such as the ones adopted in TSE or FASE methods. In order to improve upon such methods, future research could consider simultaneous topology and parameter estimation, the correlation between different PMU channels and measurement scans, as well as more advanced techniques for state forecasting and formulating the transition function.
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Schweppe, F. Power System Static-State Estimation, Part III: Implementation. IEEE Trans. Power Appar. Syst. 1970, PAS-89, 130–135. [Google Scholar] [CrossRef]
- Abur, A.; Gómez Expósito, A. Power System State Estimation: Theory and Implementation; Power engineering; Marcel Dekker: New York, NY, USA, 2004; ISBN 978-0-8247-5570-6. [Google Scholar]
- Thomas, M.S.; McDonald, J.D. Power System SCADA and Smart Grids; CRC Press, Taylor & Francis Group: Boca Raton, FL, USA, 2015; ISBN 978-1-4822-2674-4. [Google Scholar]
- Phasor Measurement Units and Wide Area Monitoring Systems: From the Sensors to the System; Monti, A. (Ed.) Elsevier: Amsterdam, The Netherlands, 2016; ISBN 978-0-12-804569-5. [Google Scholar]
- Monticelli, A. State Estimation in Electric Power Systems: A Generalized Approach; The Kluwer international series in engineering and computer science; Power electronics and power systems; Kluwer Academic Publishers: Boston, MA, USA, 1999; ISBN 978-0-7923-8519-6. [Google Scholar]
- Zhao, J.; Qi, J.; Huang, Z.; Meliopoulos, A.P.S.; Gomez-Exposito, A.; Netto, M.; Mili, L.; Abur, A.; Terzija, V.; Kamwa, I.; et al. Power System Dynamic State Estimation: Motivations, Definitions, Methodologies, and Future Work. IEEE Trans. Power Syst. 2019, 34, 3188–3198. [Google Scholar] [CrossRef]
- Simon, D. Optimal State Estimation: Kalman, H Infinity and Nonlinear Approaches; Wiley-Interscience: Hoboken, NJ, USA, 2006; ISBN 978-0-471-70858-2. [Google Scholar]
- Liu, H.; Hu, F.; Su, J.; Wei, X.; Qin, R. Comparisons on Kalman-Filter-Based Dynamic State Estimation Algorithms of Power Systems. IEEE Access 2020, 8, 51035–51043. [Google Scholar] [CrossRef]
- Phadke, A.G.; Phadke, A.G.; Thorp, J.S. Synchronized Phasor Measurements and Their Applications; Power electronics and power systems; Springer: New York, NY, USA, 2008; ISBN 978-0-387-76537-2. [Google Scholar]
- Terzija, V.; Valverde, G.; Cai, D.; Regulski, P.; Madani, V.; Fitch, J.; Skok, S.; Begovic, M.M.; Phadke, A. Wide-Area Monitoring, Protection, and Control of Future Electric Power Networks. Proc. IEEE 2011, 99, 80–93. [Google Scholar] [CrossRef]
- Gomez-Exposito, A.; Abur, A.; Rousseaux, P. On the Use of PMUs in Power System State Estimation. In Proceedings of the 17th Power System Computation Conference, Stockholm, Sweden, 22–26 August 2011; p. 14. [Google Scholar]
- Jin, Z.; Wall, P.; Chen, Y.; Yu, J.; Chakrabarti, S.; Terzija, V. Analysis of Hybrid State Estimators: Accuracy and Convergence of Estimator Formulations. IEEE Trans. Power Syst. 2019, 34, 2565–2576. [Google Scholar] [CrossRef]
- Application of Time-Synchronized Measurements in Power System Transmission Networks; Kezunovic, M. (Ed.) Power electronics and power systems; Springer: Berlin/Heidelberg, Germany, 2014; ISBN 978-3-319-06217-4. [Google Scholar]
- Chakrabarti, S.; Kyriakides, E.; Ledwich, G.; Ghosh, A. A Comparative Study of the Methods of Inclusion of PMU Current Phasor Measurements in a Hybrid State Estimator. In Proceedings of the IEEE PES General Meeting, Minneapolis, MN, USA, 25–29 July 2010; pp. 1–7. [Google Scholar]
- Kabiri, M.; Amjady, N. A New Hybrid State Estimation Considering Different Accuracy Levels of PMU and SCADA Measurements. IEEE Trans. Instrum. Meas. 2019, 68, 3078–3089. [Google Scholar] [CrossRef]
- Glavic, M.; Van Cutsem, T. Reconstructing and Tracking Network State from a Limited Number of Synchrophasor Measurements. IEEE Trans. Power Syst. 2013, 28, 1921–1929. [Google Scholar] [CrossRef] [Green Version]
- Manousakis, N.M.; Korres, G.N. A Hybrid Power System State Estimator Using Synchronized and Unsynchronized Sensors. Int. Trans. Electr. Energy Syst. 2018, 28, e2580. [Google Scholar] [CrossRef]
- Asprou, M.; Chakrabarti, S.; Kyriakides, E. A Two-Stage State Estimator for Dynamic Monitoring of Power Systems. IEEE Syst. J. 2017, 11, 1767–1776. [Google Scholar] [CrossRef]
- Gol, M.; Abur, A. A Hybrid State Estimator For Systems With Limited Number of PMUs. IEEE Trans. Power Syst. 2015, 30, 1511–1517. [Google Scholar] [CrossRef]
- Gol, M. A Decentralization Method for Hybrid State Estimators. IEEE Trans. Power Syst. 2018, 33, 2070–2077. [Google Scholar] [CrossRef]
- Hamidi, R.J.; Khodabandelou, H.; Livani, H.; Sami-Fadali, M. Hybrid State Estimation Using Distributed Compressive Sensing. In Proceedings of the 2016 IEEE Power and Energy Society General Meeting (PESGM), Boston, MA, USA, 17–21 July 2016; pp. 1–5. [Google Scholar]
- Zhao, J.; Zhang, G.; Das, K.; Korres, G.N.; Manousakis, N.M.; Sinha, A.K.; He, Z. Power System Real-Time Monitoring by Using PMU-Based Robust State Estimation Method. IEEE Trans. Smart Grid 2016, 7, 300–309. [Google Scholar] [CrossRef] [Green Version]
- Sun, K.; Huang, M.; Wei, Z.; Zhao, J.; Sun, G. A Real-Time Recursion Correction Hybrid Linear State Estimator Using Stream Processing. IEEE Trans. Ind. Inform. 2022, 1–12. [Google Scholar] [CrossRef]
- Dubey, A.; Chakrabarti, S.; Sharma, A.; Terzija, V. Optimal Utilisation of PMU Measurements in Power System Hybrid State Estimators. IET Gener. Transm. Distrib. 2019, 13, 4978–4986. [Google Scholar] [CrossRef]
- Zhang, Q.; Chakhchoukh, Y.; Vittal, V.; Heydt, G.T.; Logic, N.; Sturgill, S. Impact of PMU Measurement Buffer Length on State Estimation and Its Optimization. IEEE Trans. Power Syst. 2013, 28, 1657–1665. [Google Scholar] [CrossRef]
- Murugesan, V.; Chakhchoukh, Y.; Vittal, V.; Heydt, G.T.; Logic, N.; Sturgill, S. PMU Data Buffering for Power System State Estimators. IEEE Power Energy Technol. Syst. J. 2015, 2, 94–102. [Google Scholar] [CrossRef]
- Chakhchoukh, Y.; Vittal, V.; Heydt, G.T. PMU Based State Estimation by Integrating Correlation. IEEE Trans. Power Syst. 2014, 29, 617–626. [Google Scholar] [CrossRef]
- Zhao, J.; Wang, S.; Mili, L.; Amidan, B.; Huang, R.; Huang, Z. A Robust State Estimation Framework Considering Measurement Correlations and Imperfect Synchronization. IEEE Trans. Power Syst. 2018, 33, 4604–4613. [Google Scholar] [CrossRef]
- Bi, T.S.; Qin, X.H.; Yang, Q.X. A Novel Hybrid State Estimator for Including Synchronized Phasor Measurements. Electr. Power Syst. Res. 2008, 78, 1343–1352. [Google Scholar] [CrossRef]
- Korres, G.N.; Manousakis, N.M. State Estimation and Bad Data Processing for Systems Including PMU and SCADA Measurements. Electr. Power Syst. Res. 2011, 81, 1514–1524. [Google Scholar] [CrossRef]
- Valverde, G.; Chakrabarti, S.; Kyriakides, E.; Terzija, V. A Constrained Formulation for Hybrid State Estimation. IEEE Trans. Power Syst. 2011, 26, 1102–1109. [Google Scholar] [CrossRef]
- Mallik, S.K.; Chakrabarti, S.; Singh, S.N. A Robust Regularized Hybrid State Estimator for Power Systems. Electr. Power Compon. Syst. 2014, 42, 671–681. [Google Scholar] [CrossRef]
- Khalili, R.; Abur, A. Iterative Linear State Estimation Using a Limited Number of PMU Measurements. In Proceedings of the 2021 IEEE Madrid PowerTech, Madrid, Spain, 28 June–2 July 2021; pp. 1–6. [Google Scholar]
- Jovicic, A.; Hug, G. Linear State Estimation and Bad Data Detection for Power Systems with RTU and PMU Measurements. IET Gener. Transm. Distrib. 2020, 14, 5675–5684. [Google Scholar] [CrossRef]
- Dobakhshari, A.S.; Azizi, S.; Abdolmaleki, M.; Terzija, V. Linear LAV-based State Estimation Integrating Hybrid SCADA/PMU Measurements. IET Gener. Transm. Distrib. 2020, 14, 1583–1590. [Google Scholar] [CrossRef]
- Dobakhshari, A.S.; Abdolmaleki, M.; Terzija, V.; Azizi, S. Robust Hybrid Linear State Estimator Utilizing SCADA and PMU Measurements. IEEE Trans. Power Syst. 2021, 36, 1264–1273. [Google Scholar] [CrossRef]
- Jovicic, A.; Codoni, N.; Hug, G. Computationally Efficient Robust State Estimation for Power Transmission Systems with RTU and PMU Measurements. In Proceedings of the 2020 52nd North American Power Symposium (NAPS), Tempe, AZ, USA, 11–13 April 2021; pp. 1–6. [Google Scholar]
- Jovicic, A.; Jereminov, M.; Pileggi, L.; Hug, G. A Linear Formulation for Power System State Estimation Including RTU and PMU Measurements. In Proceedings of the 2019 IEEE PES Innovative Smart Grid Technologies Europe (ISGT-Europe), Bucharest, Romania, 29 September–2 October 2019; pp. 1–5. [Google Scholar]
- Jovicic, A.; Jereminov, M.; Pileggi, L.; Hug, G. Enhanced Modelling Framework for Equivalent Circuit-Based Power System State Estimation. IEEE Trans. Power Syst. 2020, 35, 3790–3799. [Google Scholar] [CrossRef] [Green Version]
- Fan, X.; Duan, D. Decentralized Multi-Area State Estimation with Hybrid Measurements. In Proceedings of the 2017 IEEE Power & Energy Society General Meeting, Chicago, IL, USA, 16–20 July 2017; pp. 1–5. [Google Scholar]
- Li, X.; Scaglione, A. Robust Decentralized State Estimation and Tracking for Power Systems via Network Gossiping. IEEE J. Sel. Areas Commun. 2013, 31, 1184–1194. [Google Scholar] [CrossRef] [Green Version]
- Minot, A.; Lu, Y.M.; Li, N. A Distributed Gauss-Newton Method for Power System State Estimation. IEEE Trans. Power Syst. 2016, 31, 3804–3815. [Google Scholar] [CrossRef]
- Sharma, A.; Srivastava, S.C.; Chakrabarti, S. An Iterative Multiarea State Estimation Approach Using Area Slack Bus Adjustment. IEEE Syst. J. 2016, 10, 69–77. [Google Scholar] [CrossRef]
- Dzafic, I.; Jabr, R.A.; Hrnjic, T. Hybrid State Estimation in Complex Variables. IEEE Trans. Power Syst. 2018, 33, 5288–5296. [Google Scholar] [CrossRef]
- Džafić, I.; Jabr, R.A. Real-Time Equality-Constrained Hybrid State Estimation in Complex Variables. Int. J. Electr. Power Energy Syst. 2020, 117, 105634. [Google Scholar] [CrossRef] [Green Version]
- Dzafic, I.; Jabr, R.A.; Hrnjic, T. A Complex Variable Perturbed Gauss-Newton Method for Tracking Mode State Estimation. IEEE Trans. Power Syst. 2021, 36, 2594–2602. [Google Scholar] [CrossRef]
- Zhou, M.; Centeno, V.A.; Thorp, J.S.; Phadke, A.G. An Alternative for Including Phasor Measurements in State Estimators. IEEE Trans. Power Syst. 2006, 21, 1930–1937. [Google Scholar] [CrossRef]
- Nuqui, R.F.; Phadke, A.G. Hybrid Linear State Estimation Utilizing Synchronized Phasor Measurements. In Proceedings of the 2007 IEEE Lausanne Power Tech, Lausanne, Switzerland, 1–5 July 2007; pp. 1665–1669. [Google Scholar]
- Jamuna, K.; Swarup, K.S. Two Stage State Estimator with Phasor Measurements. In Proceedings of the 2009 International Conference on Power Systems, Kharagpur, India, 27–29 December 2009; pp. 1–5. [Google Scholar]
- Moshtagh, S.; Rahmani, M. Robust Hybrid State Estimation for Power Systems Utilizing Phasor Measurements Units. Electr. Power Syst. Res. 2021, 196, 107195. [Google Scholar] [CrossRef]
- Rathod, N.; Patel, H.; Joshi, S. Implementing Two Stage Hybrid State Estimation with Various Approaches. In Proceedings of the 2020 International Conference on Smart Grids and Energy Systems (SGES), Perth, Australia, 23–26 November 2020; pp. 627–632. [Google Scholar]
- Bez, D.M.; Costa, A.S.; Ascari, L.B.; Junior, E.Z. A Block Version of Orthogonal Rotations for Improving the Accuracy of Hybrid State Estimators. IEEE Trans. Power Syst. 2020, 35, 4432–4444. [Google Scholar] [CrossRef]
- Manousakis, N.M.; Korres, G.N.; Aliprantis, J.N.; Vavourakis, G.P.; Makrinas, G.-C.J. A Two-Stage State Estimator for Power Systems with PMU and SCADA Measurements. In Proceedings of the 2013 IEEE Grenoble Conference, Grenoble, France, 16–20 June 2013; pp. 1–6. [Google Scholar]
- Kashyap, N.; Werner, S.; Huang, Y.-F.; Riihonen, T. Power System State Estimation Under Incomplete PMU Observability—A Reduced-Order Approach. IEEE J. Sel. Top. Signal Process. 2014, 8, 1051–1062. [Google Scholar] [CrossRef]
- Yang, T.; Sun, H.; Bose, A. Transition to a Two-Level Linear State Estimator—Part II: Algorithm. IEEE Trans. Power Syst. 2011, 26, 54–62. [Google Scholar] [CrossRef]
- Bar-Shalom, Y.; Campo, L. The Effect of the Common Process Noise on the Two-Sensor Fused-Track Covariance. IEEE Trans. Aerosp. Electron. Syst. 1986, AES-22, 803–805. [Google Scholar] [CrossRef]
- Costa, A.S.; Albuquerque, A.; Bez, D. An Estimation Fusion Method for Including Phasor Measurements into Power System Real-Time Modeling. IEEE Trans. Power Syst. 2013, 28, 1910–1920. [Google Scholar] [CrossRef]
- Wu, T.; Chung, C.Y.; Kamwa, I. A Fast State Estimator for Systems Including Limited Number of PMUs. IEEE Trans. Power Syst. 2017, 32, 4329–4339. [Google Scholar] [CrossRef]
- Ascari, L.B.; Costa, A.S.; Miranda, V. Correntropy-Based Fusion Strategy for Incorporating PMU Measurements into Power System State Estimation. In Proceedings of the 2019 IEEE Milan PowerTech, Milan, Italy, 23–27 June 2019; pp. 1–6. [Google Scholar]
- Zhao, J.; Mili, L. A Framework for Robust Hybrid State Estimation with Unknown Measurement Noise Statistics. IEEE Trans. Ind. Inform. 2018, 14, 1866–1875. [Google Scholar] [CrossRef]
- Ban, J.; Im, J.; Kim, Y.-J.; Zhao, J. Decentralization of Phasor-Aided State Estimation Using Local State Vector Extension. IEEE Trans. Power Syst. 2021, 36, 4645–4659. [Google Scholar] [CrossRef]
- Zhao, J.; Netto, M.; Huang, Z.; Yu, S.S.; Gomez-Exposito, A.; Wang, S.; Kamwa, I.; Akhlaghi, S.; Mili, L.; Terzija, V.; et al. Roles of Dynamic State Estimation in Power System Modeling, Monitoring and Operation. IEEE Trans. Power Syst. 2021, 36, 2462–2472. [Google Scholar] [CrossRef]
- Liu, Y.; Singh, A.K.; Zhao, J.; Meliopoulos, A.P.S.; Pal, B.; Ariff, M.A.b.M.; Van Cutsem, T.; Glavic, M.; Huang, Z.; Kamwa, I.; et al. Dynamic State Estimation for Power System Control and Protection. IEEE Trans. Power Syst. 2021, 36, 5909–5921. [Google Scholar] [CrossRef]
- Ghosal, M.; Rao, V. Fusion of Multirate Measurements for Nonlinear Dynamic State Estimation of the Power Systems. IEEE Trans. Smart Grid 2019, 10, 216–226. [Google Scholar] [CrossRef]
- Abooshahab, M.A.; Hovd, M.; Brekke, E.; Song, X. A Covariance Consistent Data Fusion Method for Power Networks with Multirate Sensors. In Proceedings of the 2020 IEEE Conference on Control Technology and Applications (CCTA), Montreal, QC, Canada, 24–26 August 2020; pp. 807–814. [Google Scholar]
- Goleijani, S.; Ameli, M.T. Neural Network-Based Power System Dynamic State Estimation Using Hybrid Data from SCADA and Phasor Measurement Units. Int. Trans. Electr. Energy Syst. 2018, 28, e2481. [Google Scholar] [CrossRef]
- Goleijani, S.; Ameli, M.T. A Multi-Agent Based Approach to Power System Dynamic State Estimation by Considering Algebraic and Dynamic State Variables. Electr. Power Syst. Res. 2018, 163, 470–481. [Google Scholar] [CrossRef]
- Zhao, J.; Wang, S.; Zhou, N.; Huang, R.; Mili, L.; Huang, Z. A New Multi-Scale State Estimation Framework for the Next Generation of Power Grid EMS. In Proceedings of the 2019 IEEE Power & Energy Society General Meeting (PESGM), Atlanta, GA, USA, 4–8 August 2019; pp. 1–5. [Google Scholar]
- Do Coutto Filho, M.B.; de Souza, J.C.S. Forecasting-Aided State Estimation—Part I: Panorama. IEEE Trans. Power Syst. 2009, 24, 1667–1677. [Google Scholar] [CrossRef]
- Valverde, G.; Terzija, V. Unscented Kalman Filter for Power System Dynamic State Estimation. IET Gener. Transm. Distrib. 2011, 5, 29. [Google Scholar] [CrossRef]
- Hu, L.; Wang, Z.; Rahman, I.; Liu, X. A Constrained Optimization Approach to Dynamic State Estimation for Power Systems Including PMU and Missing Measurements. IEEE Trans. Control Syst. Technol. 2015, 24, 703–710. [Google Scholar] [CrossRef]
- Cheng, Z.; Ren, H.; Zhang, B.; Lu, R. Distributed Kalman Filter for Large-Scale Power Systems with State Inequality Constraints. IEEE Trans. Ind. Electron. 2021, 68, 6238–6247. [Google Scholar] [CrossRef]
- Sharma, A.; Samantaray, S.R. Power System Tracking State Estimator for Smart Grid Under Unreliable PMU Data Communication Network. IEEE Sens. J. 2018, 18, 2107–2116. [Google Scholar] [CrossRef]
- Sharma, A.; Srivastava, S.C.; Chakrabarti, S. A Cubature Kalman Filter Based Power System Dynamic State Estimator. IEEE Trans. Instrum. Meas. 2017, 66, 2036–2045. [Google Scholar] [CrossRef]
- Xiao, Y.; Lu, M.; Huang, Z.; Wang, Y.; Lin, L.; Zhang, C. Dynamic State Estimation of Power System Considering Asynchronous Measurement. In Proceedings of the 2020 International Conference on Electrical Engineering and Control Technologies (CEECT), Melbourne, VIC, Australia, 10–13 December 2020; pp. 1–6. [Google Scholar]
- Stankovic, A.M.; Svenda, V.; Saric, A.T.; Transtrum, M.K. Hybrid Power System State Estimation with Irregular Sampling. In Proceedings of the 2017 IEEE Power & Energy Society General Meeting, Chicago, IL, USA, 16–20 July 2017; pp. 1–5. [Google Scholar]
- Geetha, S.J.; Sharma, A.; Chakrabarti, S. Unscented Rauch–Tung–Streibel Smoother-based Power System Forecasting-aided State Estimator Using Hybrid Measurements. IET Gener. Transm. Distrib. 2019, 13, 3583–3590. [Google Scholar] [CrossRef]
- Massignan, J.A.D.; London, J.B.A.; Maciel, C.D.; Bessani, M.; Miranda, V. PMUs and SCADA Measurements in Power System State Estimation through Bayesian Inference. In Proceedings of the 2019 IEEE Milan PowerTech, Milan, Italy, 23–27 June 2019; pp. 1–6. [Google Scholar]
- Qu, B.; Wang, Z.; Shen, B. Fusion Estimation for a Class of Multi-Rate Power Systems with Randomly Occurring SCADA Measurement Delays. Automatica 2021, 125, 109408. [Google Scholar] [CrossRef]
- Karimipour, H.; Dinavahi, V. Extended Kalman Filter-Based Parallel Dynamic State Estimation. IEEE Trans. Smart Grid 2015, 6, 1539–1549. [Google Scholar] [CrossRef]
- Goleijani, S.; Ameli, M.T. An Agent-Based Approach to Power System Dynamic State Estimation through Dual Unscented Kalman Filter and Artificial Neural Network. Soft Comput. 2019, 23, 12585–12606. [Google Scholar] [CrossRef]
- Sun, Y.; Zhao, Y. Distributed Cubature Kalman Filter with Performance Comparison for Large-Scale Power Systems. Int. J. Control Autom. Syst. 2021, 19, 1319–1327. [Google Scholar] [CrossRef]
- Kirincic, V.; Skok, S.; Terzija, V. A Two-Step Hybrid Power System State Estimator. Int. Trans. Electr. Energy Syst. 2015, 25, 1158–1172. [Google Scholar] [CrossRef]
- Dubey, A.; Chakrabarti, S. An Unscented Kalman Filter Based Hybrid State Estimator Considering Conventional and PMU Measurements. In Proceedings of the 2016 IEEE 6th International Conference on Power Systems (ICPS), New Delhi, India, 4–6 March 2016; pp. 1–6. [Google Scholar]
- Alcaide-Moreno, B.A.; Fuerte-Esquivel, C.R.; Glavic, M.; Van Cutsem, T. Electric Power Network State Tracking From Multirate Measurements. IEEE Trans. Instrum. Meas. 2018, 67, 33–44. [Google Scholar] [CrossRef]
- Qing, X.; Karimi, H.R.; Niu, Y.; Wang, X. Decentralized Unscented Kalman Filter Based on a Consensus Algorithm for Multi-Area Dynamic State Estimation in Power Systems. Int. J. Electr. Power Energy Syst. 2015, 65, 26–33. [Google Scholar] [CrossRef]
- Massignan, J.A.; London, J.B.; Miranda, V. Tracking Power System State Evolution with Maximum-Correntropy-Based Extended Kalman Filter. J. Mod. Power Syst. Clean Energy 2020, 8, 616–626. [Google Scholar] [CrossRef]
- Bian, X.; Li, X.R.; Chen, H.; Gan, D.; Qiu, J. Joint Estimation of State and Parameter with Synchrophasors—Part I: State Tracking. IEEE Trans. Power Syst. 2011, 26, 1196–1208. [Google Scholar] [CrossRef]
- Wang, Y.; Xia, M.; Chen, Q.; Chen, F.; Yang, X.; Han, F. Fast State Estimation of Power System Based on Extreme Learning Machine Pseudo-Measurement Modeling. In Proceedings of the 2019 IEEE Innovative Smart Grid Technologies—Asia (ISGT Asia), Chengdu, China, 21–24 May 2019; pp. 1236–1241. [Google Scholar]
- Camoes, F.; Massignan, J.A.D.; Miranda, V.; London, J.B.A. Sliding-Priors for Bayesian Information Fusion in SCADA+PMU-Based State Estimation. In Proceedings of the 2022 17th International Conference on Probabilistic Methods Applied to Power Systems (PMAPS), Manchester, UK, 12–15 June 2022; pp. 1–6. [Google Scholar]
- Švenda, V.G.; Stanković, A.M.; Sarić, A.T.; Transtrum, M.K. Flexible Hybrid State Estimation for Power Systems with Communication Irregularities. IET Gener. Transm. Distrib. 2020, 14, 2111–2119. [Google Scholar] [CrossRef]
- Gu, Y.; Yu, Z.; Diao, R.; Shi, D. Doubly-Fed Deep Learning Method for Bad Data Identification in Linear State Estimation. J. Mod. Power Syst. Clean Energy 2020, 8, 1140–1150. [Google Scholar] [CrossRef]
- Chen, Y.; Chen, H.; Jiao, Y.; Ma, J.; Lin, Y. Data-Driven Robust State Estimation Through Off-Line Learning and On-Line Matching. J. Mod. Power Syst. Clean Energy 2021, 9, 897–909. [Google Scholar] [CrossRef]
- Gao, Z.; Hu, S.; Sun, H.; Liu, J.; Zhi, Y.; Li, J. Dynamic State Estimation of New Energy Power Systems Considering Multi-Level False Data Identification Based on LSTM-CNN. IEEE Access 2021, 9, 142411–142424. [Google Scholar] [CrossRef]
- Kim, J.; Kang, J.-H.; Bae, J.; Lee, W.; Kim, K.-K.K. Distributed Moving Horizon Estimation via Operator Splitting for Automated Robust Power System State Estimation. IEEE Access 2021, 9, 90428–90440. [Google Scholar] [CrossRef]
- Tian, G.; Gu, Y.; Shi, D.; Fu, J.; Yu, Z.; Zhou, Q. Neural-Network-Based Power System State Estimation with Extended Observability. J. Mod. Power Syst. Clean Energy 2021, 9, 1043–1053. [Google Scholar] [CrossRef]
- Wang, L.; Zhou, Q.; Jin, S. Physics-Guided Deep Learning for Power System State Estimation. J. Mod. Power Syst. Clean Energy 2020, 8, 607–615. [Google Scholar] [CrossRef]
- Chen, T.; Cao, Y.; Sun, L.; Qing, X.; Zhang, J. A Distributed Robust Power System State Estimation Approach Using T-Distribution Noise Model. IEEE Syst. J. 2021, 15, 1066–1076. [Google Scholar] [CrossRef]
- Cheng, G.; Lin, Y.; Chen, Y.; Bi, T. Adaptive State Estimation for Power Systems Measured by PMUs With Unknown and Time-Varying Error Statistics. IEEE Trans. Power Syst. 2021, 36, 4482–4491. [Google Scholar] [CrossRef]
- Sun, Z.; Liu, C.; Peng, S. Maximum Correntropy with Variable Center Unscented Kalman Filter for Robust Power System State Estimation. Entropy 2022, 24, 516. [Google Scholar] [CrossRef]
- Hossain, M.J.; Naeini, M. Multi-Area Distributed State Estimation in Smart Grids Using Data-Driven Kalman Filters. Energies 2022, 15, 7105. [Google Scholar] [CrossRef]




Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Darmis, O.; Korres, G. A Survey on Hybrid SCADA/WAMS State Estimation Methodologies in Electric Power Transmission Systems. Energies 2023, 16, 618. https://doi.org/10.3390/en16020618
Darmis O, Korres G. A Survey on Hybrid SCADA/WAMS State Estimation Methodologies in Electric Power Transmission Systems. Energies. 2023; 16(2):618. https://doi.org/10.3390/en16020618
Chicago/Turabian StyleDarmis, Orestis, and George Korres. 2023. "A Survey on Hybrid SCADA/WAMS State Estimation Methodologies in Electric Power Transmission Systems" Energies 16, no. 2: 618. https://doi.org/10.3390/en16020618