
A Solar Photovoltaic Array and Grid Source-Fed Brushless DC Motor Drive for Water-Pumping Applications


Abstract
:1. Introduction
2. PFA Converter and MPP Converter Configuration
2.1. Operation of PFA Converter
- Main voltage’s positive semi-cycle
- Switch SY is switched on.
- Gate pulse withdrawn from Switch SY.
- Inductor current ILY vanishes with SY in the same state as Case 2.
- Main voltage’s positive semi-cycle
- 4.
- Switch SX is switched on.
- 5.
- Gate pulse withdrawn from Switch SX.
- 6.
- Diode current IDY finishes with SX in off state (negative cycle DICM).
- (1)
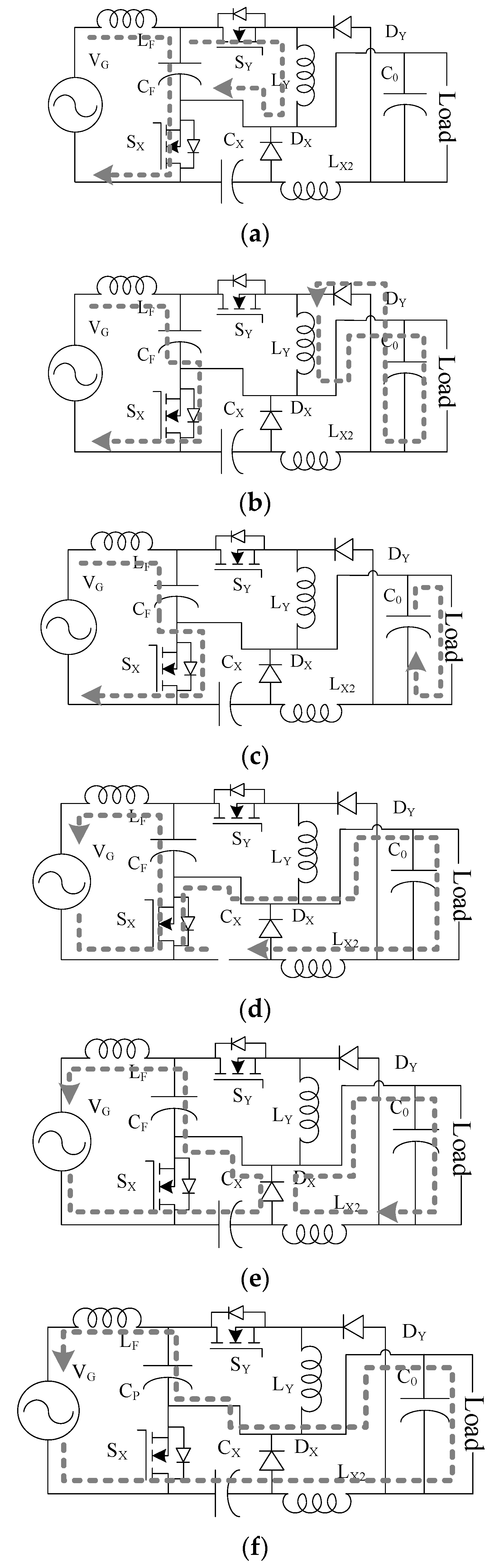
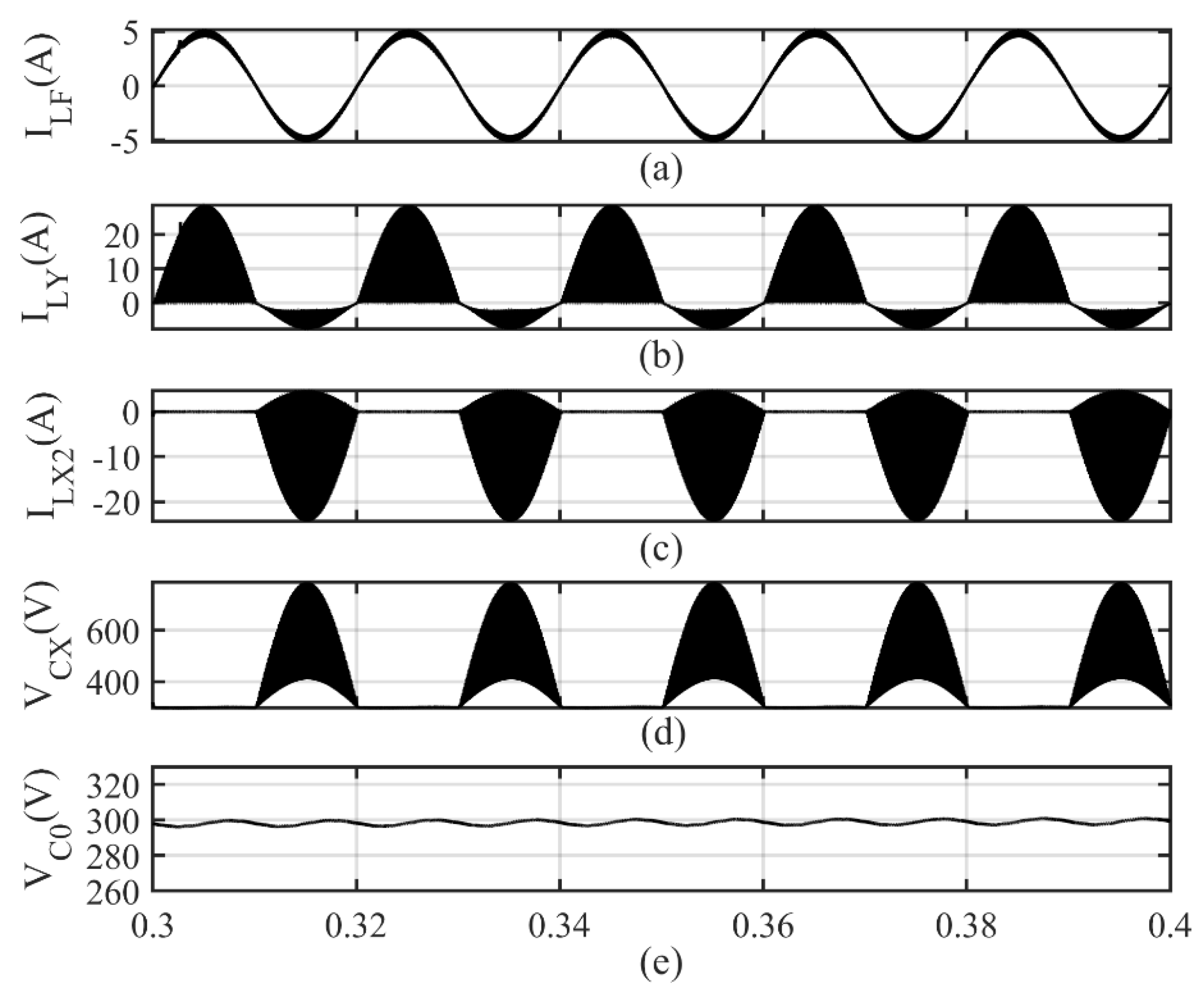
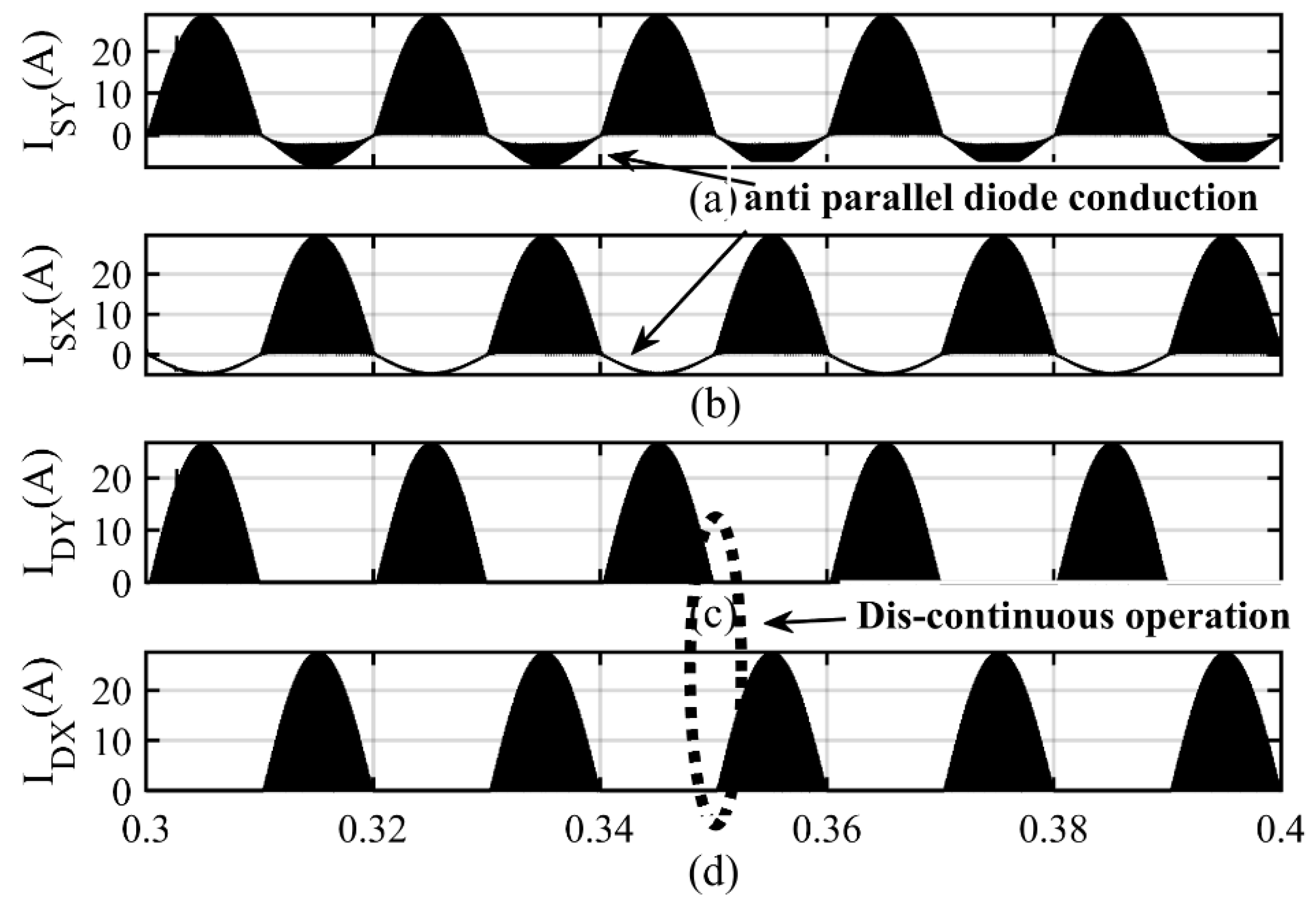
- Mode I—The start of the positive semi-cycle of the main voltage initiates Mode I. IGBT SP is provided with a gate pulse throughout this time period. In addition, CF–LF–VG–CF and CF–SY–LY–CF are the conduction networks for this mode. The built-in anti-parallel IGBT (SY) diode additionally conducts during Mode I to complete the loop. In Figure 2a, a Mode I conduction path is deployed.The following relationship is utilized for determining the inductor current:The maximum flow of the current through an IGBT SY operating in Mode I can be calculated as:where TS stands for time interval and d1 for the duty cycle.
- (2)
- Mode II—IGBT SP is removed with an input gate pulse in Mode II. In Figure 2b, Mode II conduction loops are shown. The inductor LY discharges in Mode II via the load and diode DY. The formula can be used to calculate the diode current, which is:
- (3)
- Mode III—The third and final mode of the positive semi-cycle is called DiCM. In Figure 2c, Mode III conduction loops are deployed. When the inductor’s energy storage is depleted, ModeVI begins.
- (4)
- Mode IV—IGBT SN is delivered with a gate signal in Mode IV. VG–SX–CF–LF–VG and SX–C0||R–LX2–CX–SX comprise the Mode IV conduction network. Capacitor CX is discharged through a load in this operating state. For greater clarity, the Mode IV loops have been deployed in Figure 2d. The following are the values for the maximum IGBT SX current stress in Mode IV:where,
- (5)
- Mode V—Switch SX is disabled in Mode V, and Figure 2e shows the deployment of this mode’s conduction loop. In Mode V, Capacitor CX charging takes place, and the Diode DX conduction is observed throughout this time. The loop in Mode V is LF–CX–DX–CF–VG–LF. A DC-link capacitor (C0), in parallel with the load, is an additional loop constructed using an inductor LX2 and a diode DX. The maximum diode current via diode DN can be calculated using the equation.where, .The peak voltage across switch SX is determined as follows:
- (6)
- Mode VI—In this mode, the IGBT SX is still not conducting. This mode begins as soon as Diode DX ceases to operate, causing the identical current to flow via Capacitor CX and Inductor LX2. When the supply voltage is in its negative semi-cycle, Mode VI is also known as the DICM mode. In Figure 2f, the conducting network is established during Mode VI.The mathematical formula for the DCM mode is—.Where, dON = dN and dOFF = dP + dDICM.In addition,
2.2. Distinctive Features of PFA Converter
2.3. MPP Converter Operation
2.4. Selection of PFA Converter Components
2.5. Selection of MPP Converter Components
3. PFA Power-Factor Profile Improvement Converter-Based BLDC Speed Control
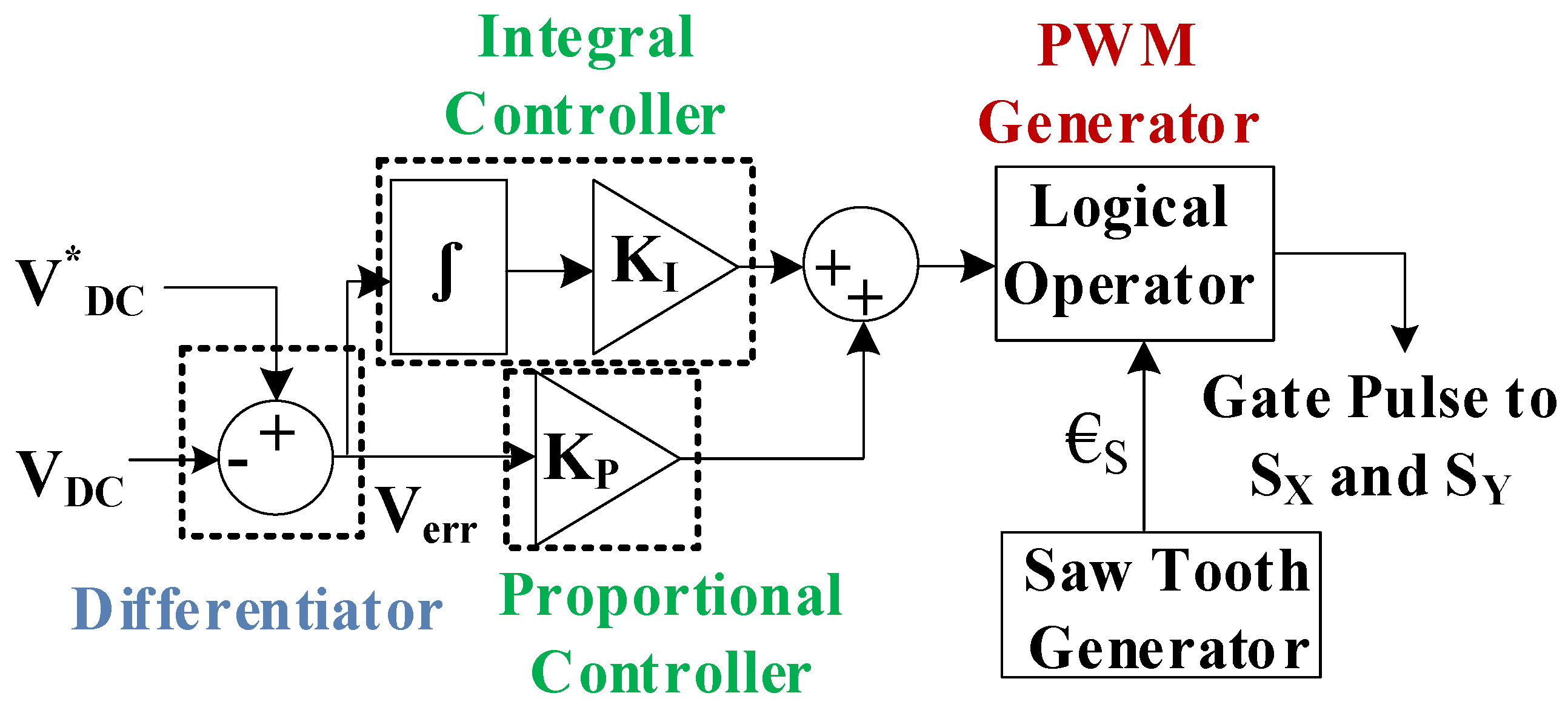
3.1. PFA Converter Control Scheme
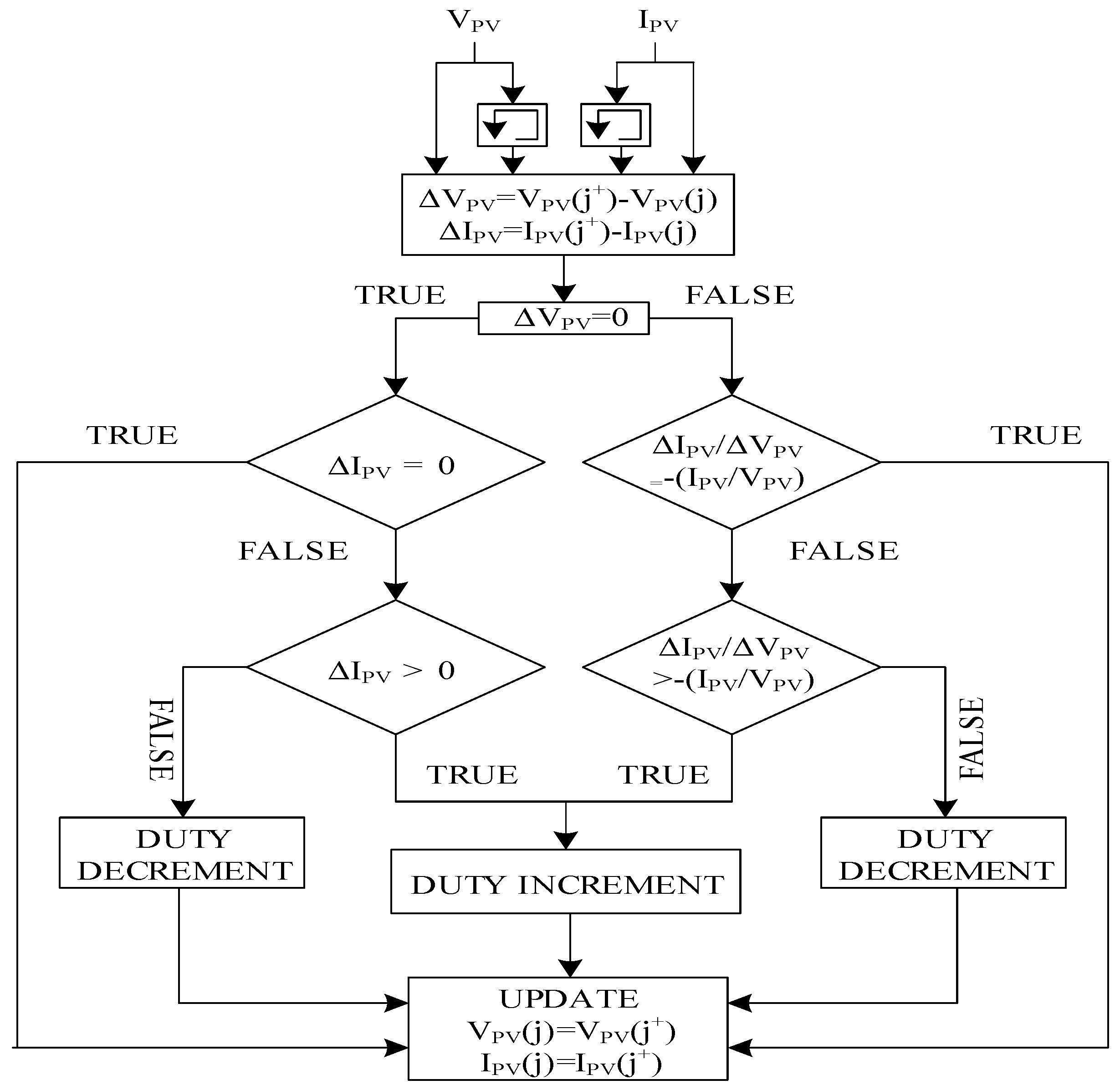
3.2. MPP Converter Control Technique
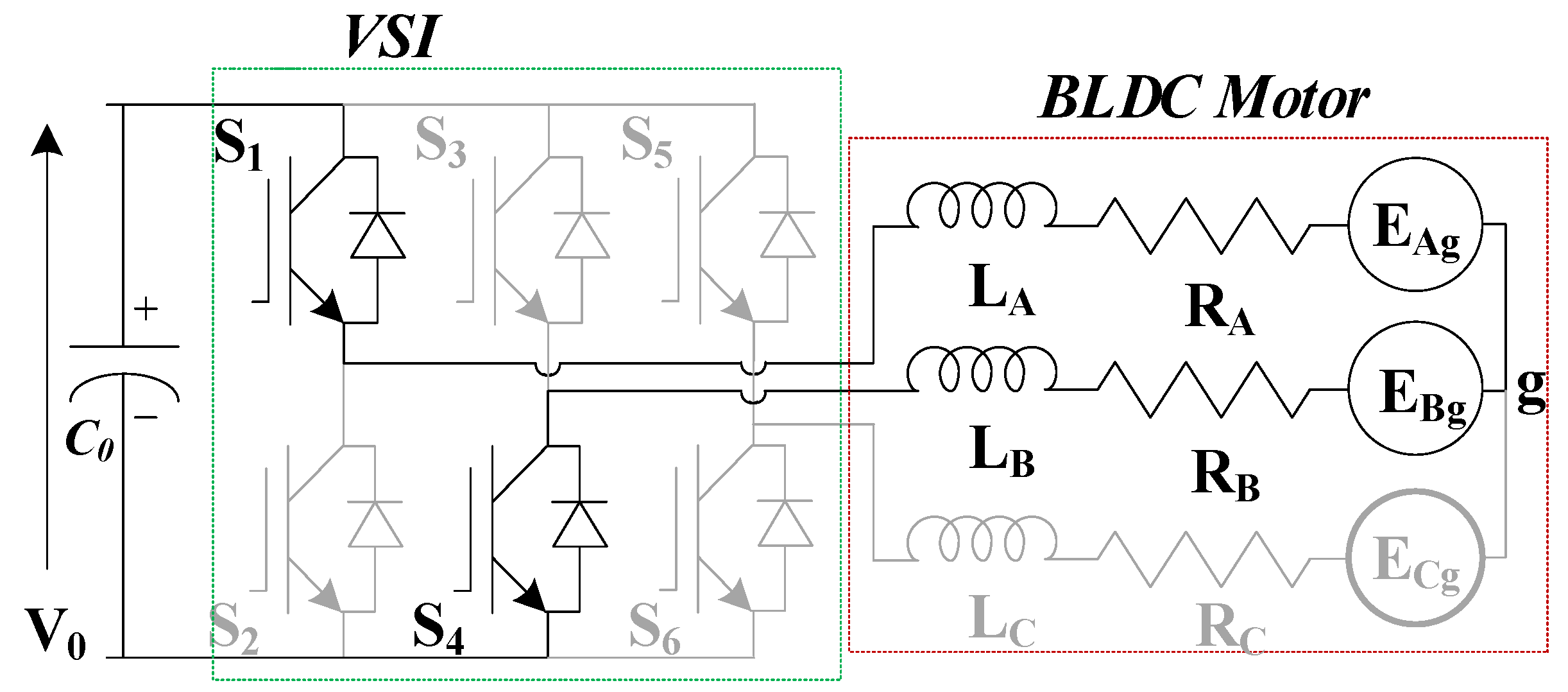
3.3. BLDC Motor Control
4. Validation and Result
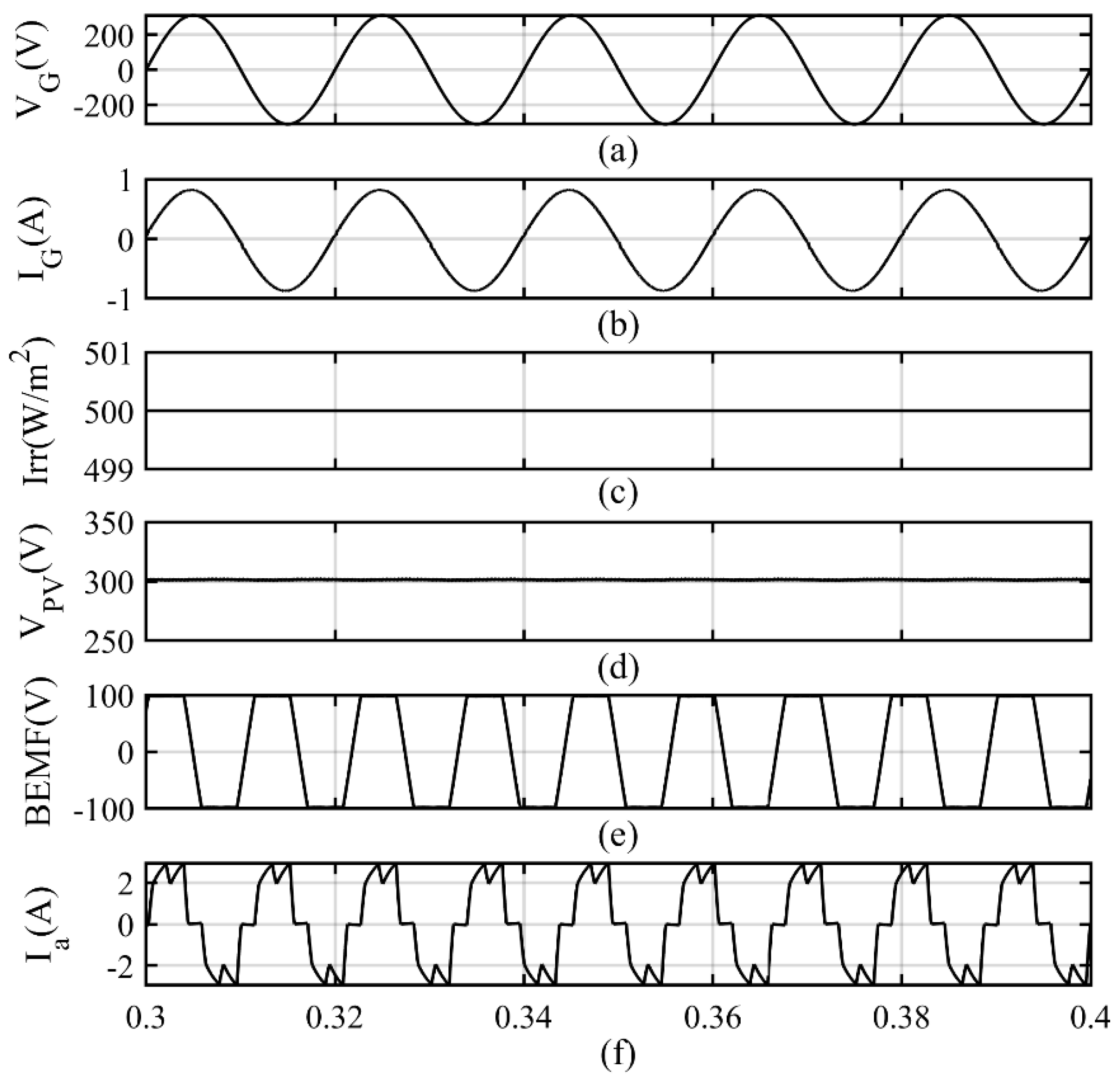
4.1. BLDC Motor Drive Performance during First Case (Both Sources Are Present)
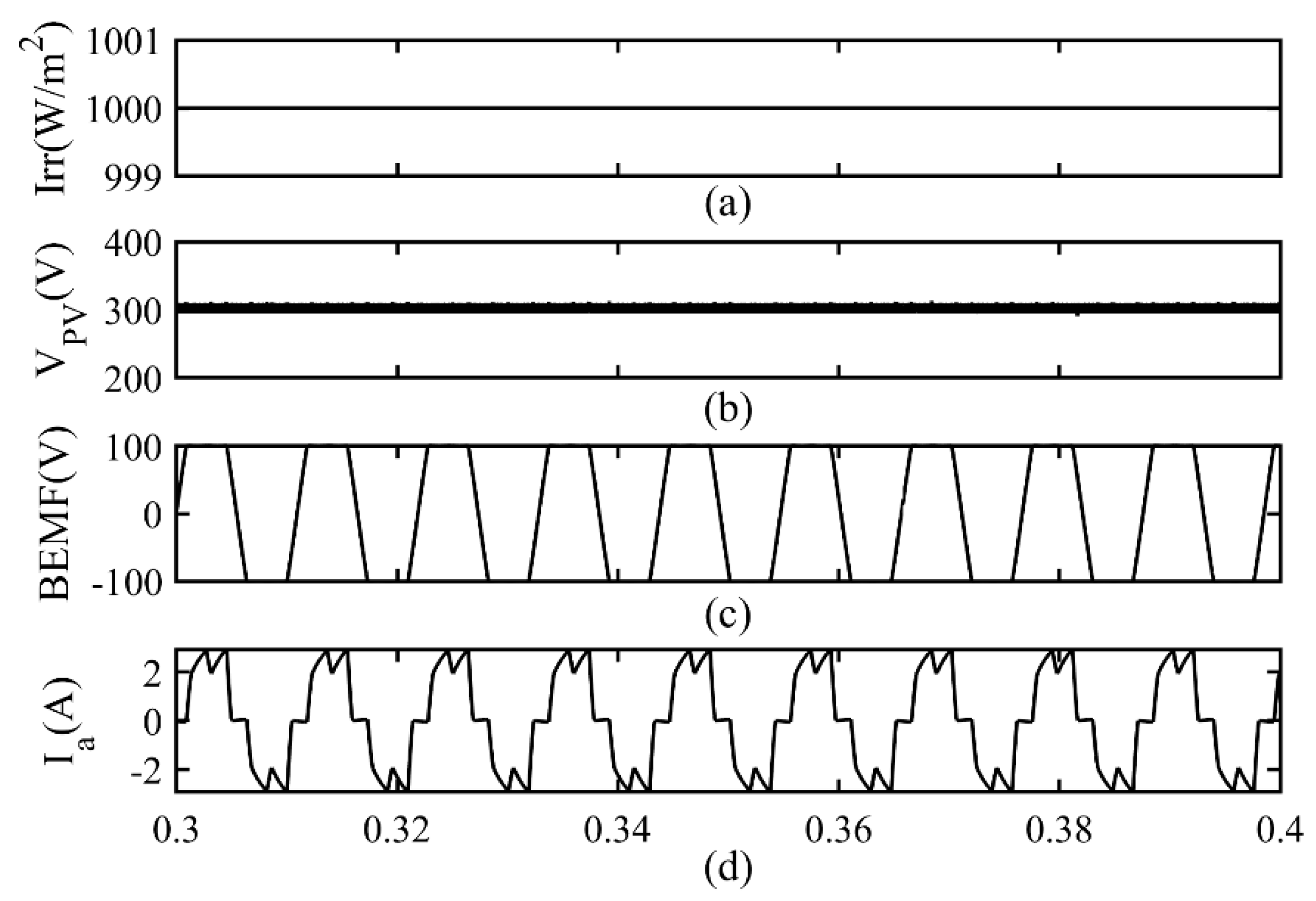
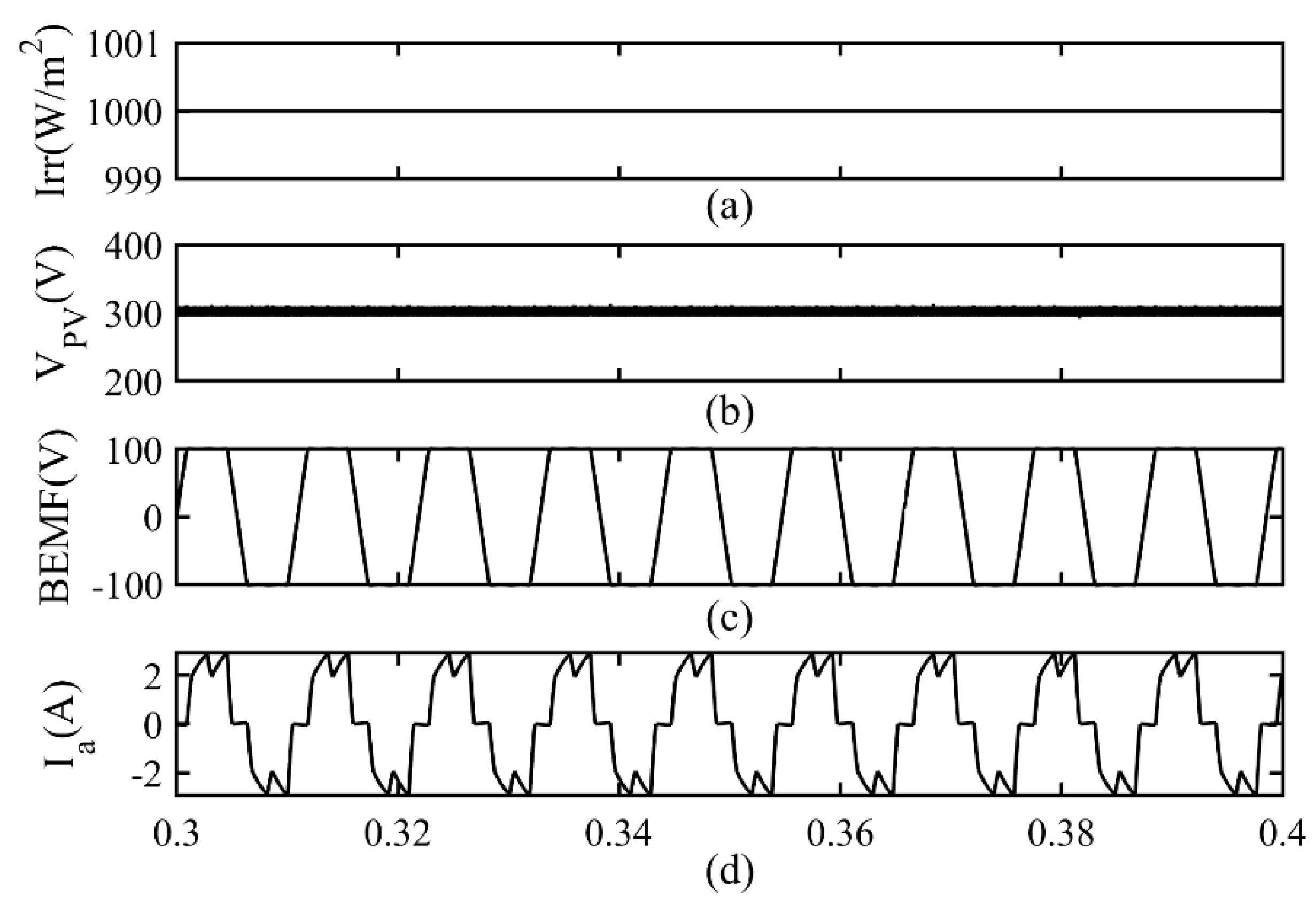
4.2. BLDC Motor Drive Performance during Second Case (Only Solar Energy Source Is Present)
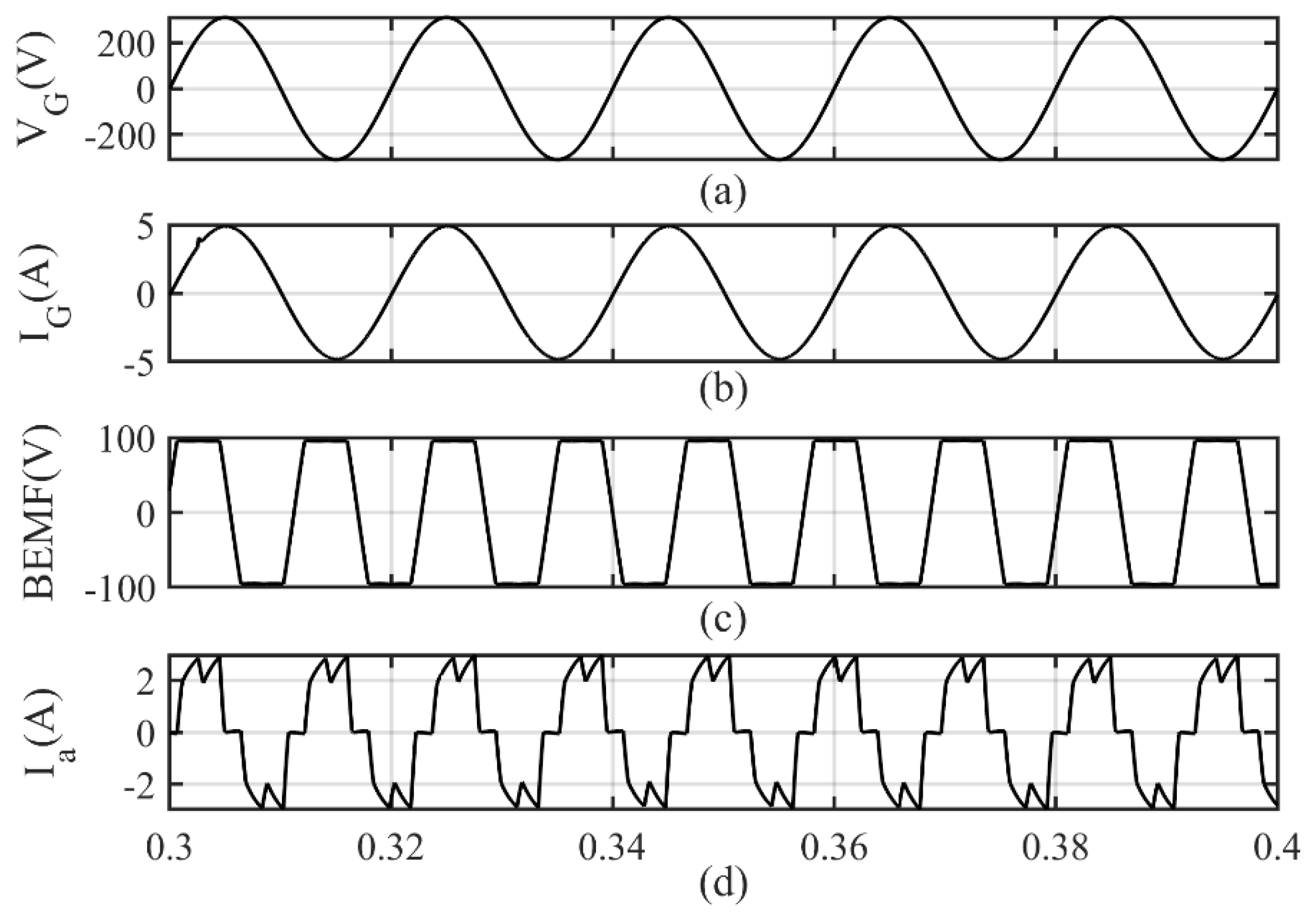
4.3. BLDC Motor Drive Performance during Third Case (Only Grid Is Present)
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A
References
- Khan, M.T.A.; Norris, G.; Chattopadhyay, R.; Husain, I.; Bhattacharya, S. Autoinspection and permitting with a PV utility interface (PUI) for residential plug-and-play solar photovoltaic unit. IEEE Trans. Ind. Appl. 2017, 53, 1337–1346. [Google Scholar] [CrossRef]
- Montorfano, M.; Sbarbaro, D.; Morán, L. Economic and technical evaluation of solar-assisted water pump stations for mining applications: A case of study. IEEE Trans. Ind. Appl. 2016, 52, 4454–4459. [Google Scholar] [CrossRef]
- Talbi, B.; Krim, F.; Rekioua, T.; Mekhilef, S.; Laib, A.; Belaout, A. A high-performance control scheme for photovoltaic pumping system under sudden irradiance and load changes. Sol. Energy 2018, 159, 353–368. [Google Scholar] [CrossRef]
- Periasamy, P.; Jain, N.; Singh, I. A review on development of photovoltaic water pumping system. Renew. Sustain. Energy Rev. 2015, 43, 918–925. [Google Scholar] [CrossRef]
- Kumar, R.; Singh, B. BLDC motor driven solar PV array fed water pumping system employing zeta converter. IEEE Trans. Ind. Appl. 2016, 52, 2315–2322. [Google Scholar] [CrossRef]
- Singh, B.; Kumar, R. Solar PV array fed water pump driven by BLDC motor using landsman converter. IET Renew. Power Gener. 2016, 10, 474–484. [Google Scholar] [CrossRef]
- Rahrah, K.; Rekioua, D.; Rekioua, T.; Bacha, S. Photovoltaic pumping system in Bejaia climate with battery storage. Int. J. Hydrogen Energy 2015, 40, 13665–13675. [Google Scholar] [CrossRef]
- Khiareddine, A.; Ben Salah, C.; Mimouni, M.F. Power management of a photovoltaic/battery pumping system in agricultural experiment station. Sol. Energy 2015, 112, 319–338. [Google Scholar] [CrossRef]
- Sigarchian, S.G.; Malmquist, A.; Fransson, T. Modeling and Control Strategy of a Hybrid PV/Wind/Engine/Battery System to Provide Electricity and Drinkable Water for Remote Applications. Energy Procedia 2014, 57, 1401–1410. [Google Scholar] [CrossRef]
- Khiareddine, A.; Ben Salah, C.; Mimouni, M.F. Strategy of Energy Control in PVP/Battery Water Pumping System. In Proceedings of the 2014 First International Conference on Green Energy ICGE 2014, Sfax, Tunisia, 25–27 March 2014; pp. 49–54. [Google Scholar] [CrossRef]
- Ugale, J.H.; Panse, M. Single Phase AC Drive for Isolated Solar Photovoltaic Water Pumping System. In Proceedings of the 2015 International Conference on Green Computing and Internet of Things (ICGCIoT), Greater Noida, India, 8–10 October 2015; pp. 1285–1287. [Google Scholar] [CrossRef]
- Boussaibo, A.; Kamta, M.; Kayem, J.; Toader, D.; Haragus, S.; Maghet, A. Characterization of Photovoltaic Pumping System Model without Battery Storage by MATLAB/Simulink. In Proceedings of the 2015 9th International Symposium on Advanced Topics in Electrical Engineering (ATEE), Bucharest, Romania, 7–9 May 2015; pp. 774–780. [Google Scholar] [CrossRef]
- Yan, Z. Photovoltaic Pumping System Using Power Grid as Energy Storage Device. Chinese Patent CN 202455296 U, 26 September 2012. [Google Scholar]
- Huang, M. Photovoltaic Water Pumping and Residual Electricity Gridconnected System. Chinese Patent CN 204131142 U, 28 January 2015. [Google Scholar]
- Xing, W. High-Efficiency Photovoltaic Pump System. Chinese Patent CN 203884338 U, 22 October 2014. [Google Scholar]
- Steel, C.; Fang, A.; Weilong, S.; Jing, G.; Xiong, Z. Photovoltaic Agricultural Power Generating Unit. Chinese Patent CN 203859717 U, 1 October 2014. [Google Scholar]
- Qiang, L.T. Solar Power Station with Water Pumping and Energy Storage. Chinese Patent CN 103595337 A, 19 February 2014. [Google Scholar]
- Shukla, T.; Nikolovski, S. A Bridgeless Cuk-BB-Converter-Based BLDCM Drive for MEV Applications. Energies 2023, 16, 3747. [Google Scholar] [CrossRef]
- Shukla, T.; Kalla, U.K. A BL-CC Converter-Based BLDC Motor Drive for Marine Electric Vehicle Applications. Int. Trans. Electr. Energy Syst. 2022, 2022, 7026462. [Google Scholar] [CrossRef]
- IEC 61000-3-2; Limits for Harmonics Current Emissions (Equipment Current per Phase). International Electrotechnical Commission: Geneva, Switzerland, 2000.
- El Khateb, A.; Rahim, N.A.; Selvaraj, J.; Uddin, M.N. Fuzzy-logiccontroller-based SEPIC converter for maximum power point tracking. IEEE Trans. Ind. Appl. 2014, 50, 2349–2358. [Google Scholar] [CrossRef]
- Singh, B.; Bist, V.; Chandra, A.; Al-Haddad, K. Power Factor Correction in Bridgeless-Luo Converter-Fed BLDC Motor Drive. IEEE Trans. Ind. Appl. 2015, 51, 1179–1188. [Google Scholar] [CrossRef]
- Singh, B.; Bist, V. A BL-CSC Converter-Fed BLDC Motor Drive with Power Factor Correction. IEEE Trans. Ind. Electron. 2015, 62, 172–183. [Google Scholar] [CrossRef]
- Bist, V.; Singh, B. A Unity Power Factor Bridgeless Isolated Cuk Converter-Fed Brushless DC Motor Drive. IEEE Trans. Ind. Electron. 2014, 62, 4118–4129. [Google Scholar] [CrossRef]
- Kumar, P.; Mishra, S. Bridgeless Landsman Converter Based PM-BLDC Motor Drive for Exhaust Fan. In Proceedings of the 2022 2nd International Conference on Intelligent Technologies (CONIT), Hubli, India, 24–26 June 2022; pp. 1–7. [Google Scholar] [CrossRef]
- Jayachandran, S.; Pavana; Vinatha, U. One Cycle Controlled Bridge-Less SEPIC Converter fed BLDC Motor Drive. In Proceedings of the 2017 IEEE International Conference on Signal Processing, Informatics, Communication and Energy Systems (SPICES), Kollam, India, 8–10 August 2017; pp. 1–6. [Google Scholar] [CrossRef]
- Ramya, A.; Balaji, M.; Bharatiraja, C. Power Quality Improvement in BLDC Motor Drive using Bridgeless Modified Cuk Converter. In Proceedings of the 2018 IEEE International Conference on Power Electronics, Drives and Energy Systems (PEDES), Chennai, India, 18–21 December 2018; pp. 1–6. [Google Scholar] [CrossRef]
- Singh, B.; Bist, V.; Chandra, A.; Al-Haddad, K. Power Quality Improvement in PFC Bridgeless-Luo Converter fed BLDC Motor Drive. In Proceedings of the 2013 IEEE Industry Applications Society Annual Meeting, Lake Buena Vista, FL, USA, 6–11 October 2013; pp. 1–8. [Google Scholar] [CrossRef]
- Saha, B.; Singh, B.; Sen, A. SMO Based Position Sensorless BLDC Motor Drive Employing Canonical Switching Cell Converter for Light Electric Vehicle. IEEE Trans. Ind. Appl. 2023, 59, 2974–2984. [Google Scholar] [CrossRef]
- Umapathi, K.; Kathiravan, G.; Usha, P. Design and Development of INC-MPPT Switched ZETA Converter for Solar PV Arrays. In Proceedings of the 2023 9th International Conference on Advanced Computing and Communication Systems (ICACCS), Coimbatore, India, 6–7 June 2023; pp. 1434–1438. [Google Scholar] [CrossRef]
- Padhi, R.; Behera, B.P.; Mohanty, K.B.; Daramukala, P. Integrated SPV-Battery BLDC Motor Drive Powered by Interleaved Boost Converter. In Proceedings of the 2023 International Conference on Power, Instrumentation, Energy and Control (PIECON), Aligarh, India, 10–12 February 2023; pp. 1–6. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| S.No. | Topology | Components Count | |||||
|---|---|---|---|---|---|---|---|
| Switch | X | C | L | D | Total | ||
| 01 | BL-Luo [22] | 2 | 00 | 4 | 5 | 4 | 16 |
| 02 | BL-CSC [23] | 2 | 00 | 4 | 3 | 4 | 13 |
| 03 | BL-isolated Cuk [24] | 2 | 02 | 6 | 5 | 4 | 19 |
| 04 | BL-Landsman [25] | 2 | 00 | 4 | 5 | 4 | 15 |
| 05 | BL-SEPIC [26] | 2 | 00 | 4 | 5 | 4 | 15 |
| 06 | BL-Zeta [28] | 2 | 00 | 4 | 5 | 4 | 15 |
| 07 | BL-Cuk [27] | 4 | 00 | 3 | 2 | 2 | 11 |
| 08 | Proposed PFA Converter | 2 | 00 | 3 | 3 | 2 | 10 |
| Module | 1 Soltech 1STH-215-P |
|---|---|
| VOC | 36.30 V |
| ISC | 07.84 A |
| PMax | 213.15 W |
| Series module/string | 20 |
| Parallel String | 11 |
| CZ | 440 nF |
| LZ | 2.8 mH |
| C0 | 2.2 mF |
(Degree) | Hall Effect Sensor Signals | Switching States of VSI | |||||||
|---|---|---|---|---|---|---|---|---|---|
| Ha | Hb | Hc | S1 | S2 | S3 | S4 | S5 | S6 | |
| (0–360/6) | 1 | 0 | 1 | 1 | 0 | 0 | 1 | 0 | 0 |
| (360/6)–(360/3) | 1 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 1 |
| (360/3)–(360/2) | 1 | 1 | 0 | 0 | 0 | 1 | 0 | 0 | 1 |
| (360/2)–(360∗2/3) | 0 | 1 | 0 | 0 | 1 | 1 | 0 | 0 | 0 |
| (360∗2/3)–(360∗5/6) | 0 | 1 | 1 | 0 | 1 | 0 | 0 | 1 | 0 |
| (360∗5/6)–360 | 0 | 0 | 1 | 0 | 0 | 0 | 1 | 1 | 0 |
| NA | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shukla, T.; Nikolovski, S. A Solar Photovoltaic Array and Grid Source-Fed Brushless DC Motor Drive for Water-Pumping Applications. Energies 2023, 16, 6133. https://doi.org/10.3390/en16176133
Shukla T, Nikolovski S. A Solar Photovoltaic Array and Grid Source-Fed Brushless DC Motor Drive for Water-Pumping Applications. Energies. 2023; 16(17):6133. https://doi.org/10.3390/en16176133
Chicago/Turabian StyleShukla, Tanmay, and Srete Nikolovski. 2023. "A Solar Photovoltaic Array and Grid Source-Fed Brushless DC Motor Drive for Water-Pumping Applications" Energies 16, no. 17: 6133. https://doi.org/10.3390/en16176133