

Design of a Direct-Liquid-Cooled Motor and Operation Strategy for the Cooling System
 ,
,  and
and
Abstract
:1. Introduction
2. State of the Art
3. Theoretical Foundation for the Investigation
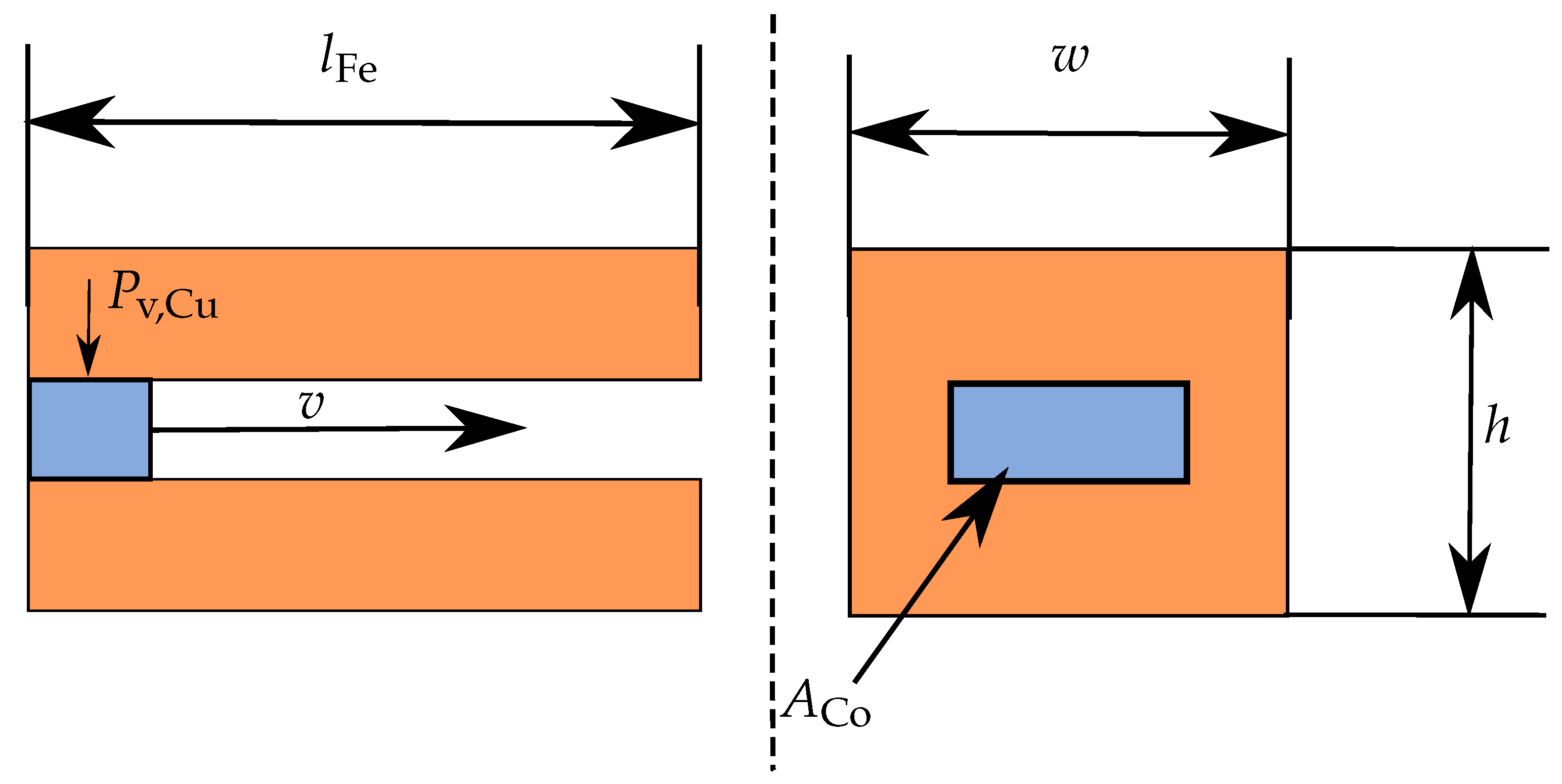
3.1. Theoretical Foundation for the Electric Motor and the Direct-Liquid-Cooled Coil Design
3.2. Theoretical Fundamentals of the Heat Exchanger and Pump
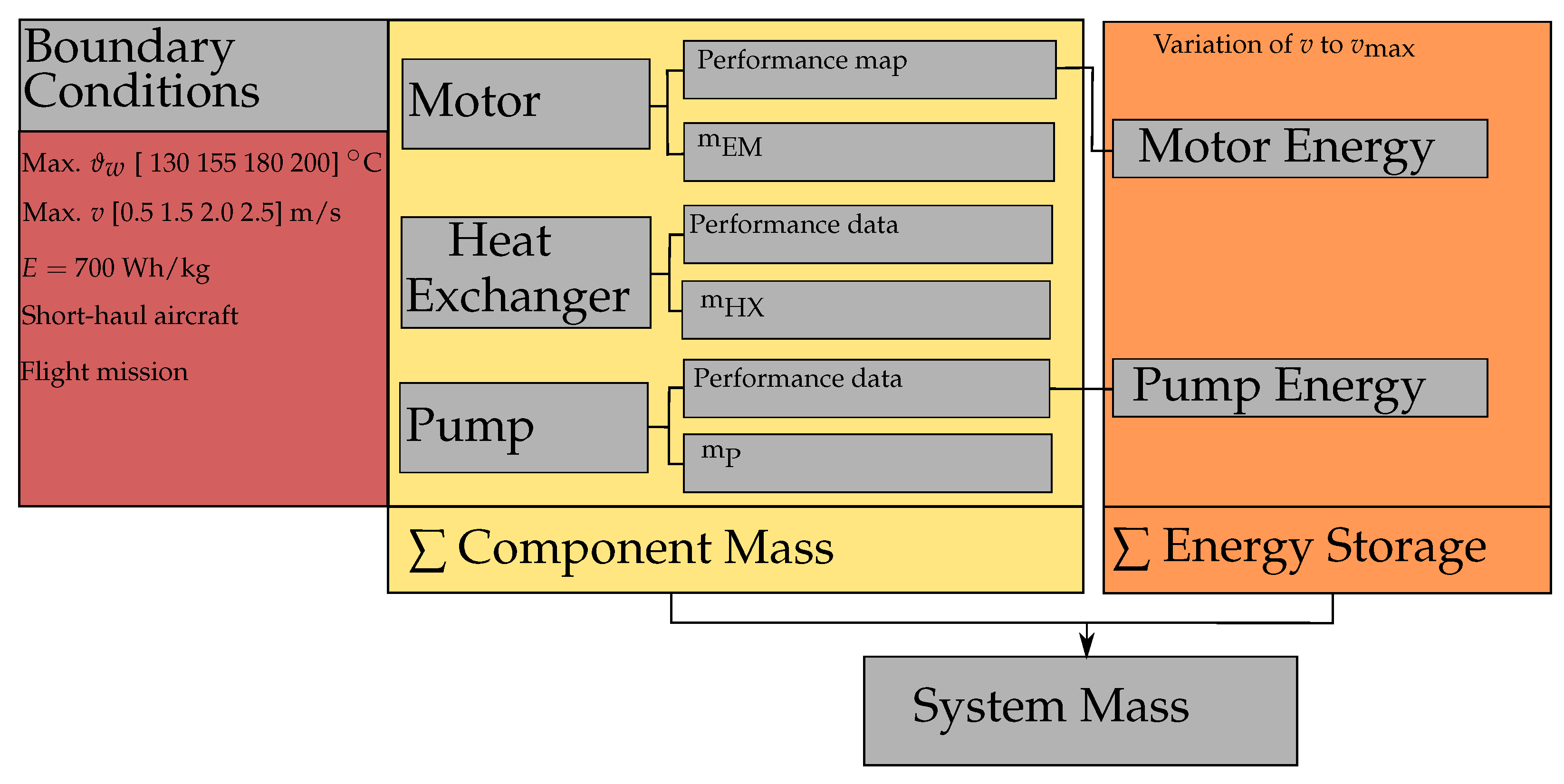
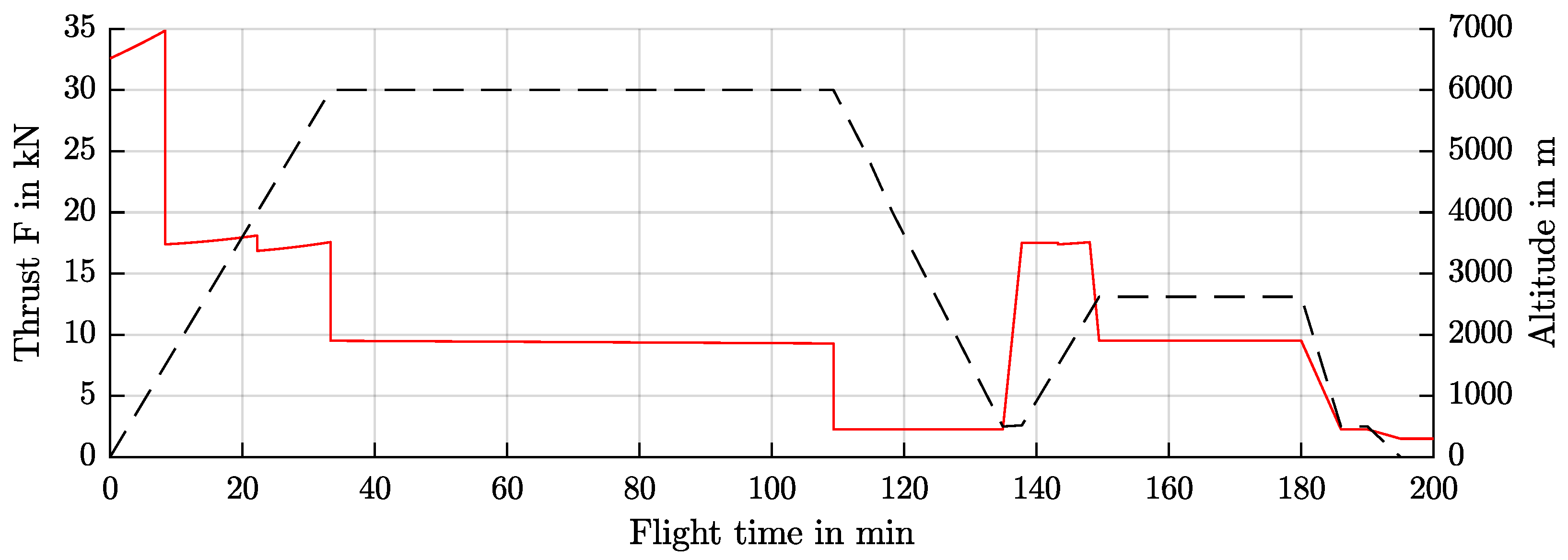
4. Boundary Conditions of the Investigation
5. Cooling System Architecture
6. Design of System Components
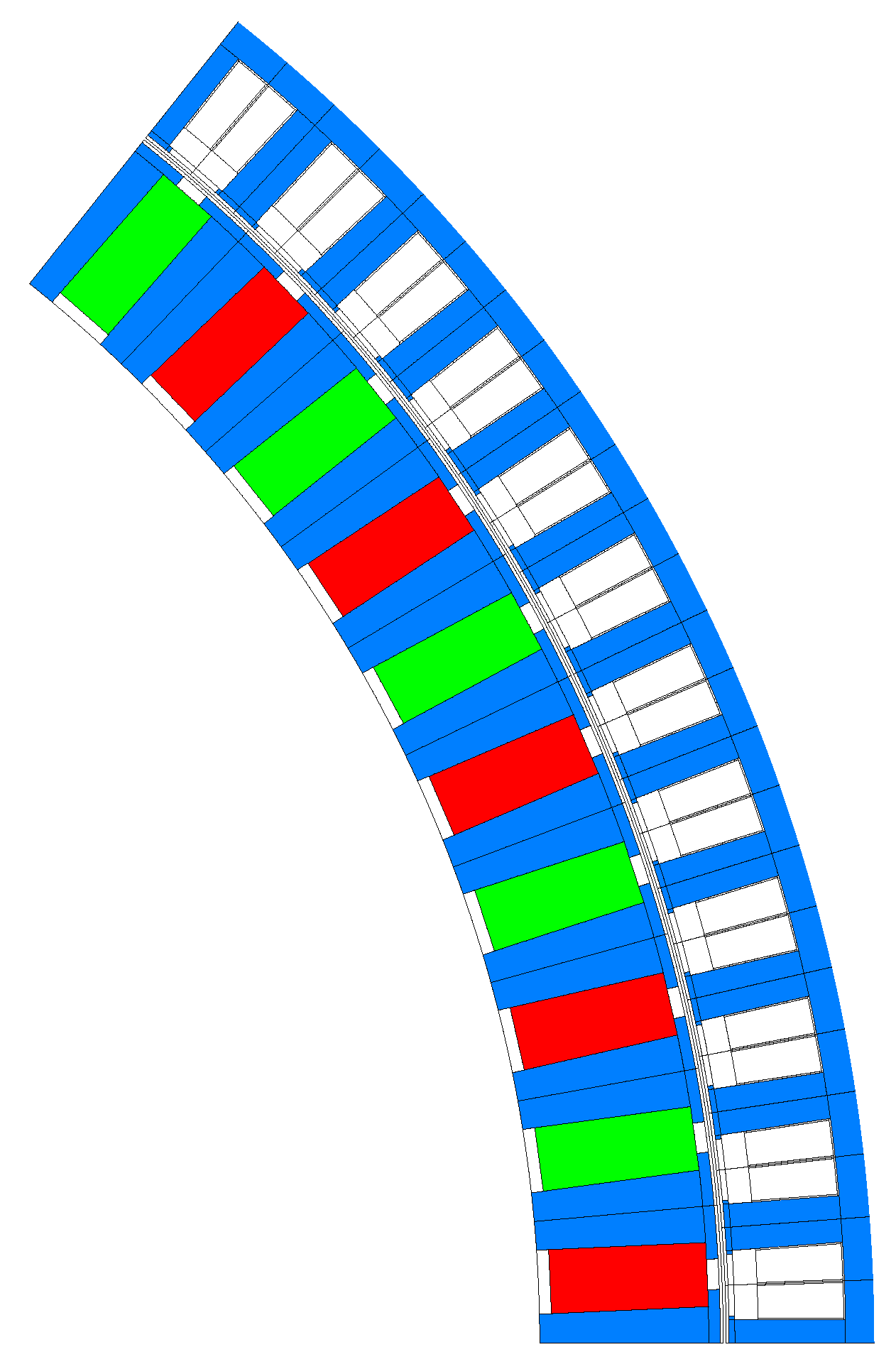
6.1. Electric Motor Design Constraints
6.2. Heat Exchanger Design Constraints
6.3. Pump Design Constraints
6.4. Comparison of System Components at Maximum Load
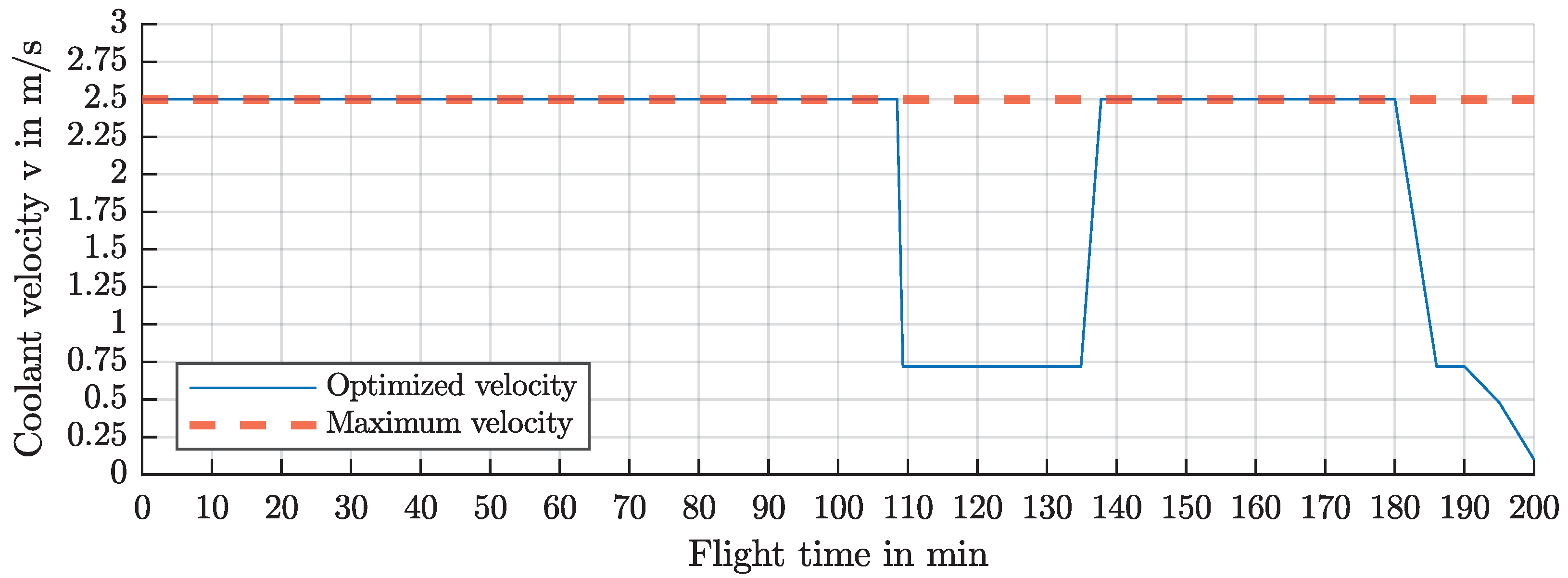
7. Optimization of Cooling System Operation Strategy
8. Discussion and Conclusions
- The mass of the heat exchanger and pump is negligible when optimizing the mass of the powertrain compared to the mass of the energy storage and the mass of the electric motor.
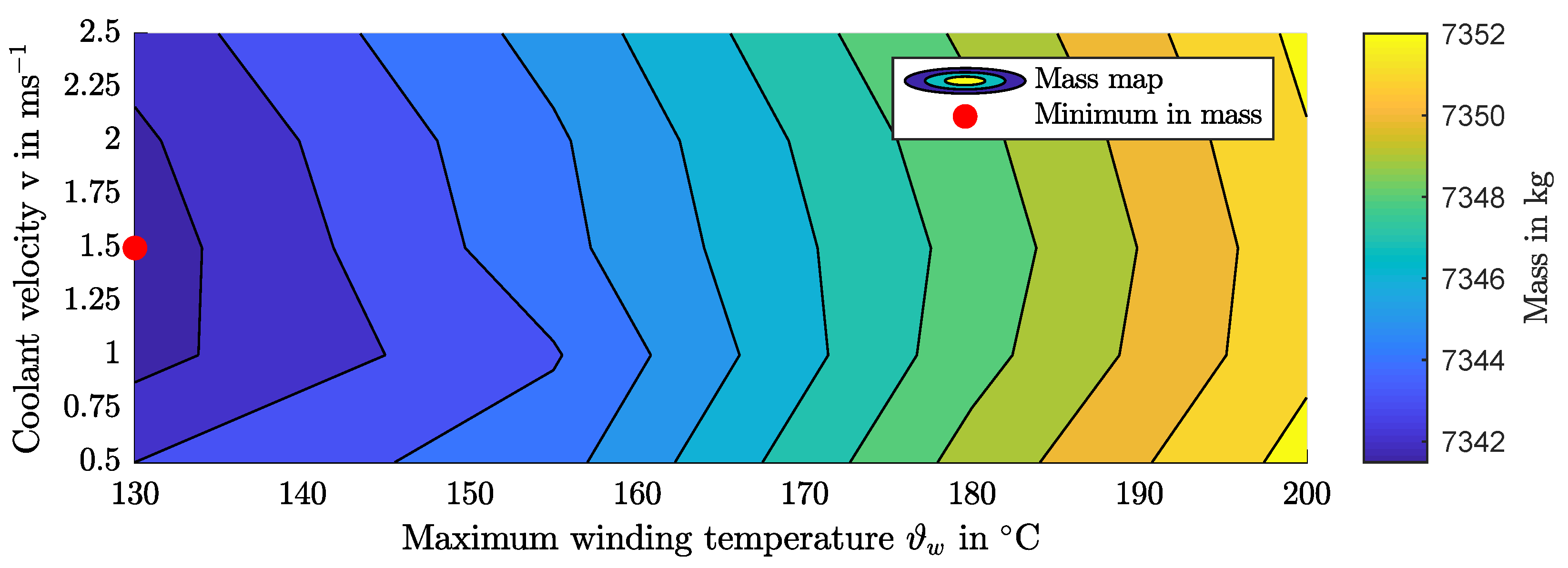
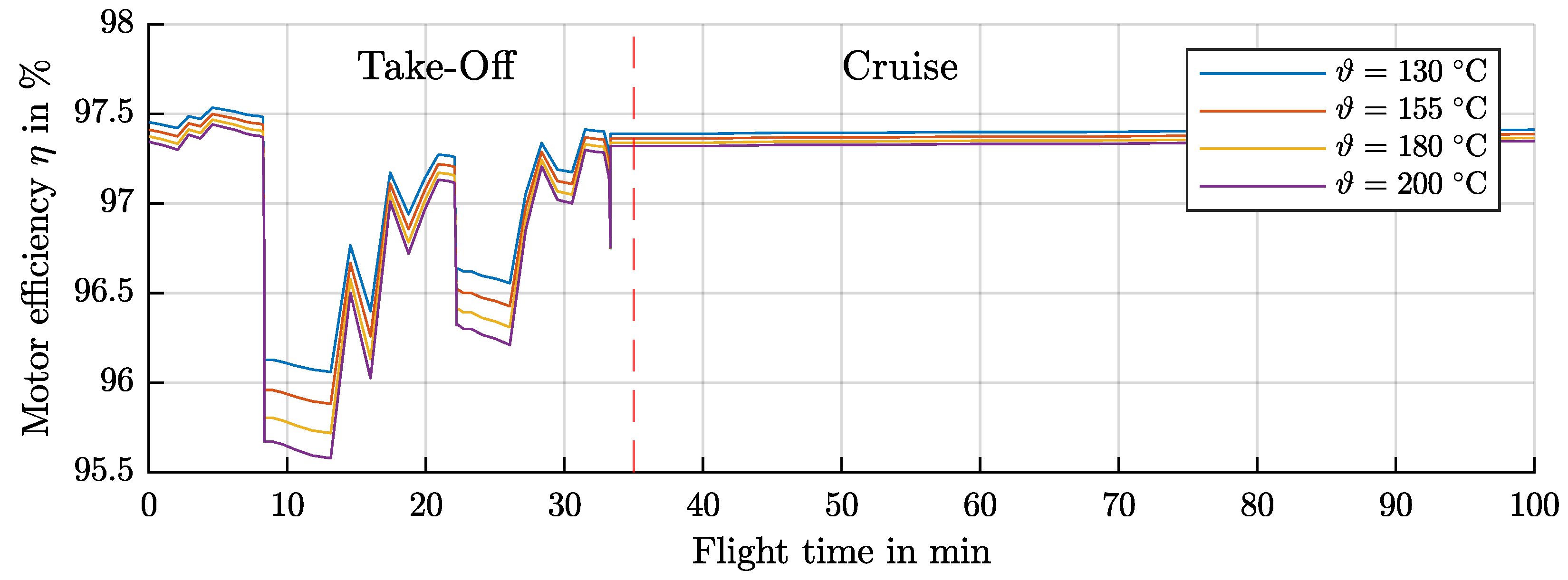
- The impact of the maximum winding temperature on the efficiency and mass of the powertrain is investigated.
- The choice of the maximum winding temperature does not have a large effect on the efficiency and thus on the total mass when the electric motor is not utilized very intensively.
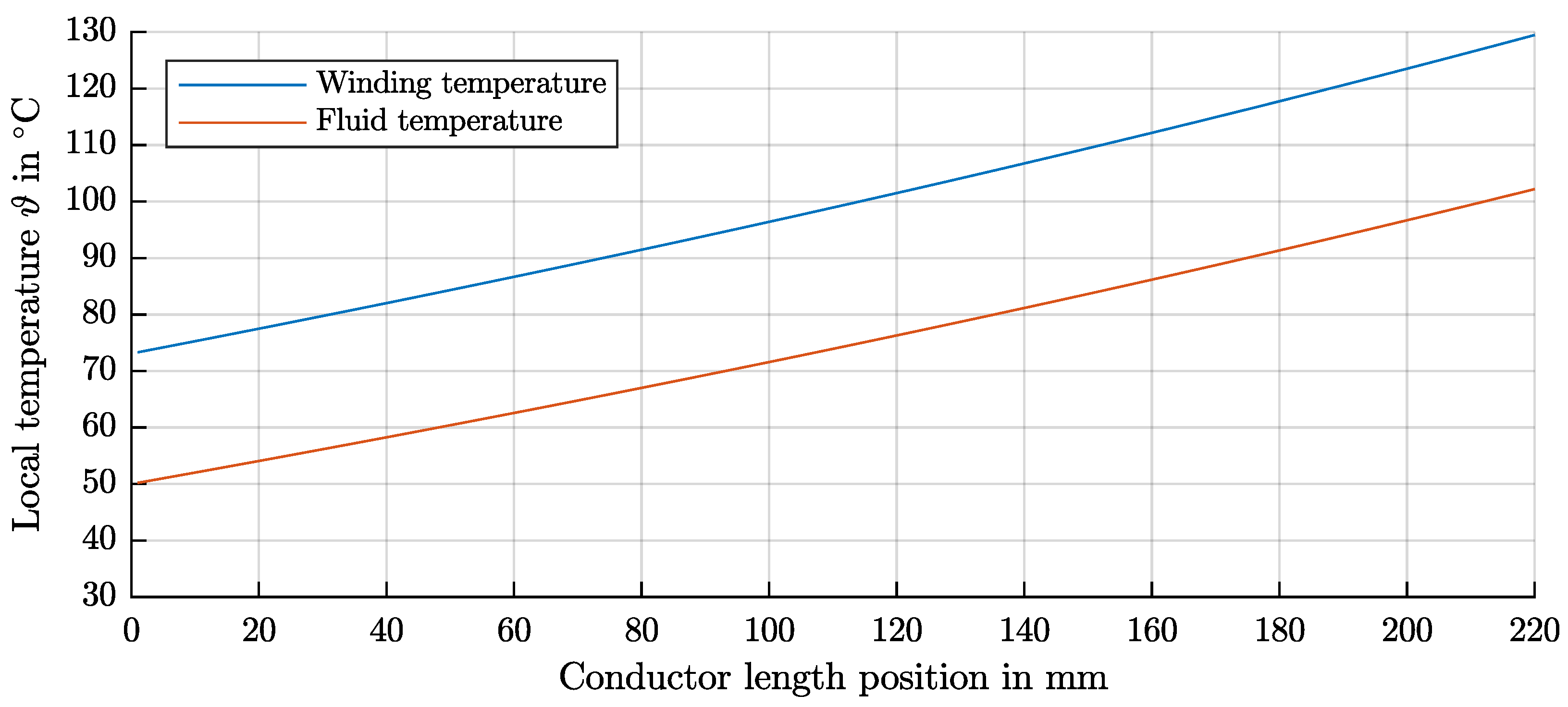
- A simplified calculation method for conductor heating and fluid heating for directly liquid-cooled windings is presented.
- The results suggest that two-phase cooling offers further advantages over single-phase cooling due to presumably lower temperature gradients. This represents an opportunity for future research.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Sixel, W.; Liu, M.; Nellis, G.; Sarlioglu, B. Cooling of Windings in Electric Machines via 3D Printed Heat Exchanger. In Proceedings of the 2018 IEEE Energy Conversion Congress and Exposition (ECCE), Portland, OR, USA, 23–27 September 2018; pp. 229–235. [Google Scholar] [CrossRef]
- Sixel, W.; Liu, M.; Nellis, G.; Sarlioglu, B. Ceramic 3D Printed Direct Winding Heat Exchangers for Improving Electric Machine Thermal Management. In Proceedings of the 2019 IEEE Energy Conversion Congress and Exposition (ECCE), Baltimore, MD, USA, 9 September–3 October 2019; pp. 769–776. [Google Scholar] [CrossRef]
- Wu, F.; EL-Refaie, A.M.; Al-Qarni, A. Additively Manufactured Hollow Conductors Integrated With Heat Pipes: Design Tradeoffs and Hardware Demonstration. IEEE Trans. Ind. Appl. 2021, 57, 3632–3642. [Google Scholar] [CrossRef]
- Petrov, I.; Lindh, P.; Niemelä, M.; Scherman, E.; Wallmark, O.; Pyrhönen, J. Investigation of a Direct Liquid Cooling System in a Permanent Magnet Synchronous Machine. IEEE Trans. Energy Convers. 2020, 35, 808–817. [Google Scholar] [CrossRef]
- Wohlers, C.; Juris, P.; Kabelac, S.; Ponick, B. Design and direct liquid cooling of tooth-coil windings. Electr. Eng. 2018, 100, 2299–2308. [Google Scholar] [CrossRef]
- Dong, T.; Zhu, C.; Zhou, F.; Zhang, H.; Lu, F.; Zhang, X. Innovated Approach of Predictive Thermal Management for High-Speed Propulsion Electric Machines in More Electric Aircraft. IEEE Trans. Transp. Electrif. 2020, 6, 1551–1561. [Google Scholar] [CrossRef]
- Yoon, M.; Jeon, C.; Kauh, S. Efficiency increase of an induction motor by improving cooling performance. IEEE Trans. Energy Convers. 2002, 17, 1–6. [Google Scholar] [CrossRef] [PubMed]
- Woodworth, A.A.; Smith, A.; Jansen, R.; Szpak, G. Select Variables Affecting Thermal System Design of a Liquid-Cooled Stator. In Proceedings of the 2020 AIAA/IEEE Electric Aircraft Technologies Symposium (EATS), New Orleans, LA, USA, 26–28 August 2020; pp. 1–8. [Google Scholar]
- Bobba, D.; Yao, Z.; Swanke, J.; Mandel, R.; McCluskey, P.; Jahns, T.; Sarlioglu, B. Multi-Physics Based Analysis and Design of Stator Coil in High Power Density PMSM for Aircraft Propulsion Applications. In Proceedings of the 2021 AIAA/IEEE Electric Aircraft Technologies Symposium (EATS), Virtual, 11–13 August 2021; pp. 1–9. [Google Scholar]
- Deisenroth, D.C.; Ohadi, M. Thermal management of high-power density electric motors for electrification of aviation and beyond. Energies 2019, 12, 3594. [Google Scholar] [CrossRef] [Green Version]
- Müller, G.; Ponick, B. Theor. Elektr. Maschinen, 6., völlig neu bearb. aufl. ed.; Wiley-VCH: Weinheim, Germany, 2009; Volume 3. [Google Scholar]
- Herr, H.H. Wärmelehre, 4th ed.; Technische Physik, Verl. Europa-Lehrmittel: Haan-Gruiten, Germany, 2006; Volume 3. [Google Scholar]
- Kays, W.M.; London, A.L. Compact Heat Exchangers, 3rd ed.; Krieger Publishing Company: Melbourne, FL, USA, 1998. [Google Scholar]
- Shah, R.K.; Sekulić, D.P. Fundamentals of Heat Exchanger Design; John Wiley & Sons: New York, NY, USA; Chichester, UK, 2003. [Google Scholar]
- Roetzel, W.; Spang, B. C1 Thermal Design of Heat Exchangers. In VDI Heat Atlas; Springer: Berlin/Heidelberg, Germany, 2010; pp. 31–66. [Google Scholar] [CrossRef]
- Schmidt, K.G. M1 Heat Transfer to Finned Tubes. In VDI Heat Atlas; Springer: Berlin/Heidelberg, Germany, 2010; pp. 1271–1278. [Google Scholar] [CrossRef]
- Gnielinski, V. G1 Heat Transfer in Pipe Flow. In VDI Heat Atlas; Springer: Berlin/Heidelberg, Germany, 2010; pp. 691–700. [Google Scholar] [CrossRef]
- Mihailović, M.; Milovančević, U.; Genić, S.; Jaćimović, B.; Otović, M.; Kolendić, P. Air side heat-transfer coefficient in plate finned tube heat exchangers. Exp. Heat Transf. 2019, 33, 388–399. [Google Scholar] [CrossRef]
- Kast, W.; Gaddis, E.S.; Wirth, K.E.; Stichlmair, J. L1 Pressure Drop in Single Phase Flow. In VDI Heat Atlas; Springer: Berlin/Heidelberg, Germany, 2010; pp. 1053–1116. [Google Scholar] [CrossRef]
- Marković, S.; Jaćimović, B.; Genić, S.; Mihailović, M.; Milovančević, U.; Otović, M. Air side pressure drop in plate finned tube heat exchangers. Int. J. Refrig. 2019, 99, 24–29. [Google Scholar] [CrossRef]
- Wrobel, R.; Scholes, B.; Mustaffer, A.; Ullah, S.; Reay, D.; Mecrow, B.; Hussein, A. Design and Experimental Characterisation of an Additively Manufactured Heat Exchanger for the Electric Propulsion Unit of a High-Altitude Solar Aircraft. In Proceedings of the 2019 IEEE Energy Conversion Congress and Exposition (ECCE), Baltimore, MD, USA, 29 September–3 October 2019; pp. 753–760. [Google Scholar] [CrossRef] [Green Version]
- Ebersberger, J.; Keuter, R.J.; Ponick, B.; Mertens, A. Power Distribution and Propulsion System for an All-Electric Regional Aircraft. In Proceedings of the 2023 IEEE International Conference on Electrical Systems for Aircraft, Railway, Ship Propulsion and Road Vehicles & International Transportation Electrification Conference (ESARS-ITEC), Venice, Italy, 29 March 2023; pp. 1–7. [Google Scholar] [CrossRef]
- Soares, C. Chapter 19—Basic Design Theory. In Gas Turbines, 2nd ed.; Soares, C., Ed.; Butterworth-Heinemann: Oxford, UK, 2015; pp. 913–958. [Google Scholar] [CrossRef]
- Keuter, R.J.; Kirsch, B.; Friedrich, J.; Ponick, B. Design Decisions for a Powertrain Combination of Electric Motor and Propeller for an Electric Aircraft. IEEE Access, 2023; accepted in IEEE Access 2023-07. [Google Scholar]
- IEC 60317-0-2:2020; Specifications for Particular Types of Winding Wires—Part 0-2: General Requirements—Enamelled Rectangular Copper Wire. 2020. Available online: https://webstore.iec.ch/publication/63495 (accessed on 3 July 2023).
- Ebersberger, J.; Fauth, L.; Keuter, R.; Cao, Y.; Freund, Y.; Hanke-Rauschenbach, R.; Ponick, B.; Mertens, A.; Friebe, J. Power Distribution and Propulsion System for an All-Electric Short-Range Commuter Aircraft—A Case Study. IEEE Access 2022, 10, 114514–114539. [Google Scholar] [CrossRef]
- Schiltgen, B.T.; Freeman, J. Aeropropulsive Interaction and Thermal System Integration within the ECO-150: A Turboelectric Distributed Propulsion Airliner with Conventional Electric Machines. In Proceedings of the 16th AIAA Aviation Technology, Integration, and Operations Conference. American Institute of Aeronautics and Astronautics, Washington, DC, USA, 13–17 June 2016. [Google Scholar] [CrossRef]
- Tahseen, T.A.; Ishak, M.; Rahman, M. An overview on thermal and fluid flow characteristics in a plain plate finned and un-finned tube banks heat exchanger. Renew. Sustain. Energy Rev. 2015, 43, 363–380. [Google Scholar] [CrossRef] [Green Version]
- Watter, H. Hydraulik und Pneumatik: Grundlagen und Übungen—Anwendungen und Simulation, 2. überarbeitete aufl., ed.; Studium, Vieweg+Teubner Verlag/GWV Fachverlage, Wiesbaden: Wiesbaden, Germany, 2008. [Google Scholar]
- Wang, P.; McCluskey, P.; Bar-Cohen, A. Two-Phase Liquid Cooling for Thermal Management of IGBT Power Electronic Module. J. Electron. Packag. 2013, 135, 4023215. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Step | Equation | Explanation |
|---|---|---|
| 1 | Time of the fluid inside the conductor | |
| 2 | Copper cross-section of one conductor | |
| 3 | Fluid wetted inside the conductor | |
| 4 | Electric resistance of one conductor | |
| 5 | Joule losses of the conductor | |
| 6 | Heating of the cooling fluid | |
| 7 | Logarithmic temperature difference | |
| 8 | Solving for the winding temperature | |
| 9 | Correction of resistance/start of the first iteration |
| Parameter | Symbol | Value |
|---|---|---|
| Outer diameter | 580 mm | |
| Inner diameter | 530 mm | |
| Number of pole pairs | p | 35 |
| Air gap | 1.5 mm | |
| Core length | 220 mm | |
| Maximum frequency | 816.6 Hz | |
| Power factor | 0.81 | |
| Power density | 11.91 kW/kg | |
| Torque density | 81.22 Nm/kg | |
| Mass | m | 147.80 kg |
| Rated voltage | 1275 V | |
| Rated current | 1025 A | |
| Parallel strands | a | 5 |
| Number of turns per coil | 8 |
| Parameter | Symbol | Value |
|---|---|---|
| Coolant outlet temperature | ||
| Air inlet temperature | ||
| Air outlet temperature | ||
| Material | - | Aluminum |
| Width | 400 mm | |
| Fin pitch | 1.67 mm | |
| Fin thickness | 0.15 mm | |
| Tube wall thickness | 0.5 mm | |
| Coolant pressure loss | 0.5 bar |
| Component | Mass in kg |
|---|---|
| Motor | 2 × 147.80 kg |
| Heat exchanger | 2 × 8.95 kg |
| Pump | 2 × 0.30 kg |
| Energy storage | 7028 kg |
| ∑ | 7342 kg |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Keuter, R.J.; Niebuhr, F.; Nozinski, M.; Krüger, E.; Kabelac, S.; Ponick, B. Design of a Direct-Liquid-Cooled Motor and Operation Strategy for the Cooling System. Energies 2023, 16, 5319. https://doi.org/10.3390/en16145319
Keuter RJ, Niebuhr F, Nozinski M, Krüger E, Kabelac S, Ponick B. Design of a Direct-Liquid-Cooled Motor and Operation Strategy for the Cooling System. Energies. 2023; 16(14):5319. https://doi.org/10.3390/en16145319
Chicago/Turabian StyleKeuter, Ralf Johannes, Florian Niebuhr, Marius Nozinski, Eike Krüger, Stephan Kabelac, and Bernd Ponick. 2023. "Design of a Direct-Liquid-Cooled Motor and Operation Strategy for the Cooling System" Energies 16, no. 14: 5319. https://doi.org/10.3390/en16145319