
A Damping Control Strategy to Improve the Stability of Multi-Parallel Grid-Connected PCSs
Abstract
:1. Introduction
2. Materials and Methods
2.1. Modeling and Control of a Single PCS
2.1.1. System Modeling
2.1.2. LCL Filter Design
- A.
- Inverter-side inductor L1
- B.
- Filter capacitor C
- C.
- Grid-side inductor L2
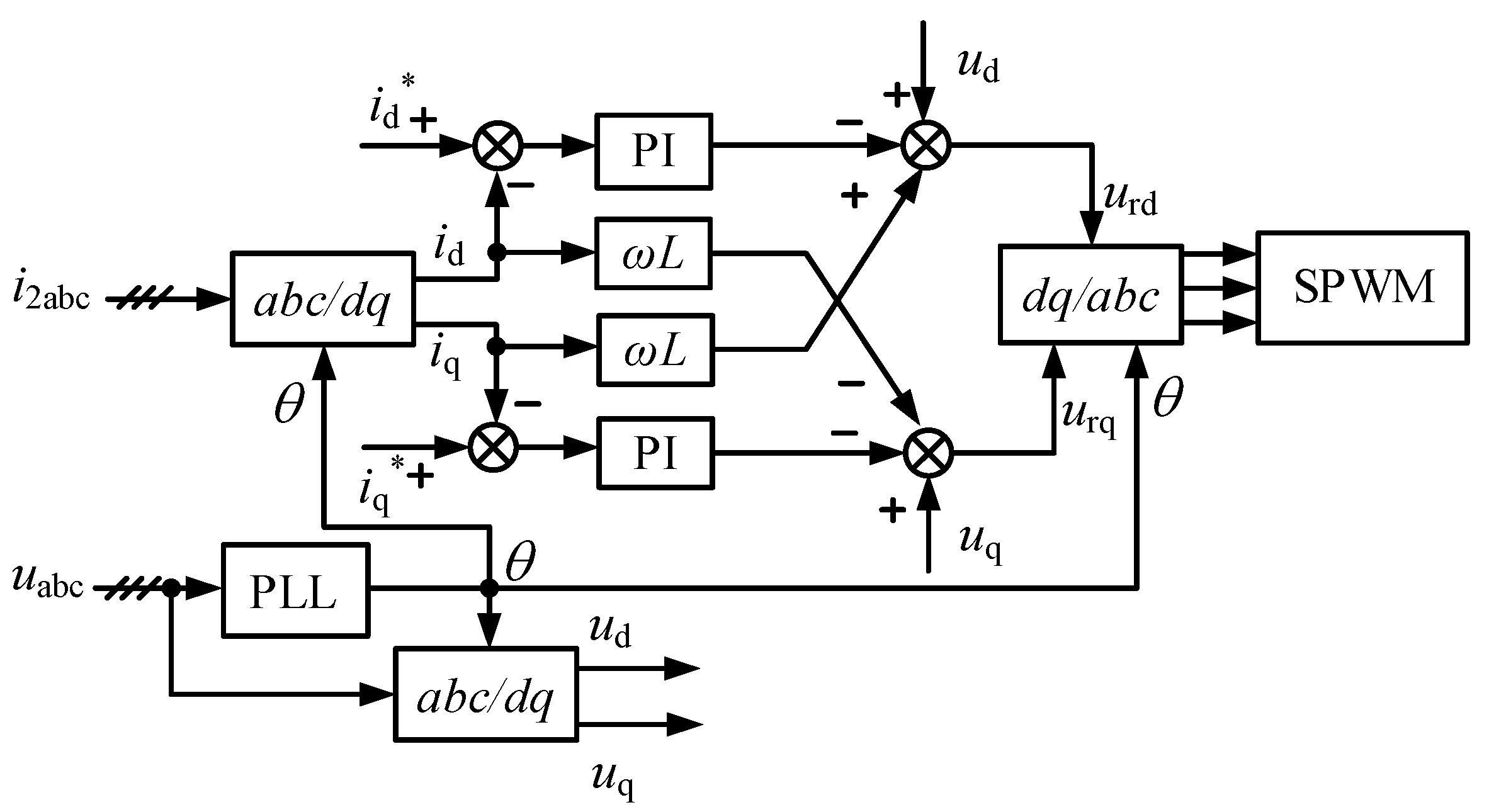
2.1.3. Control Strategy
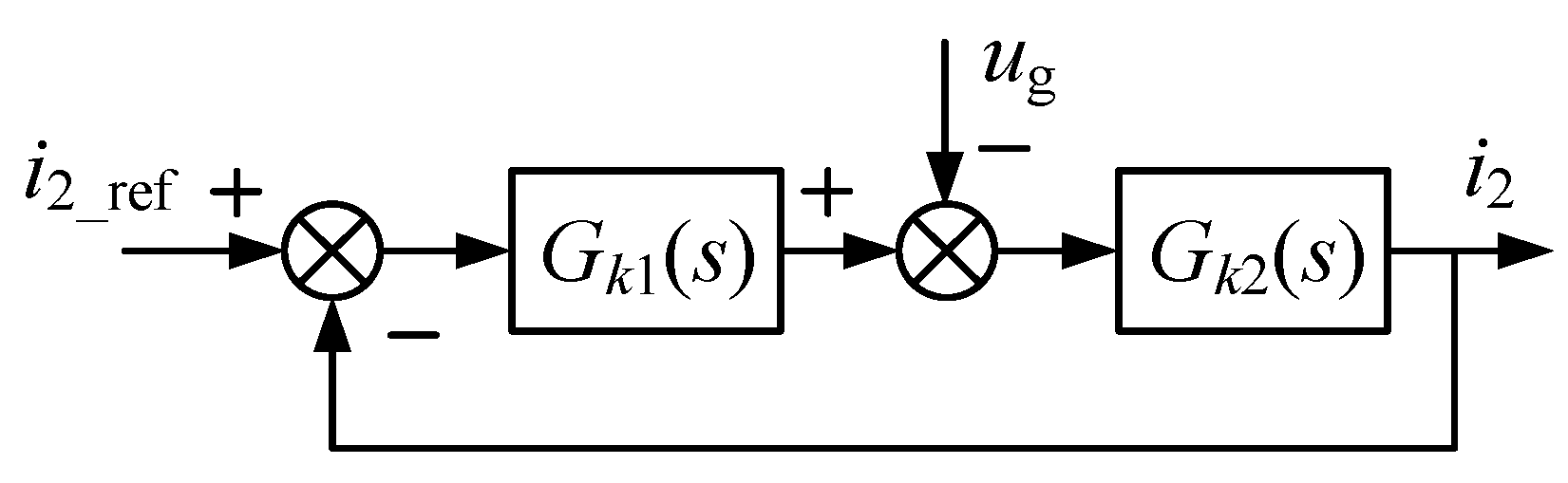
2.2. Modeling and Stability Analysis of Multi-Parallel PCSs
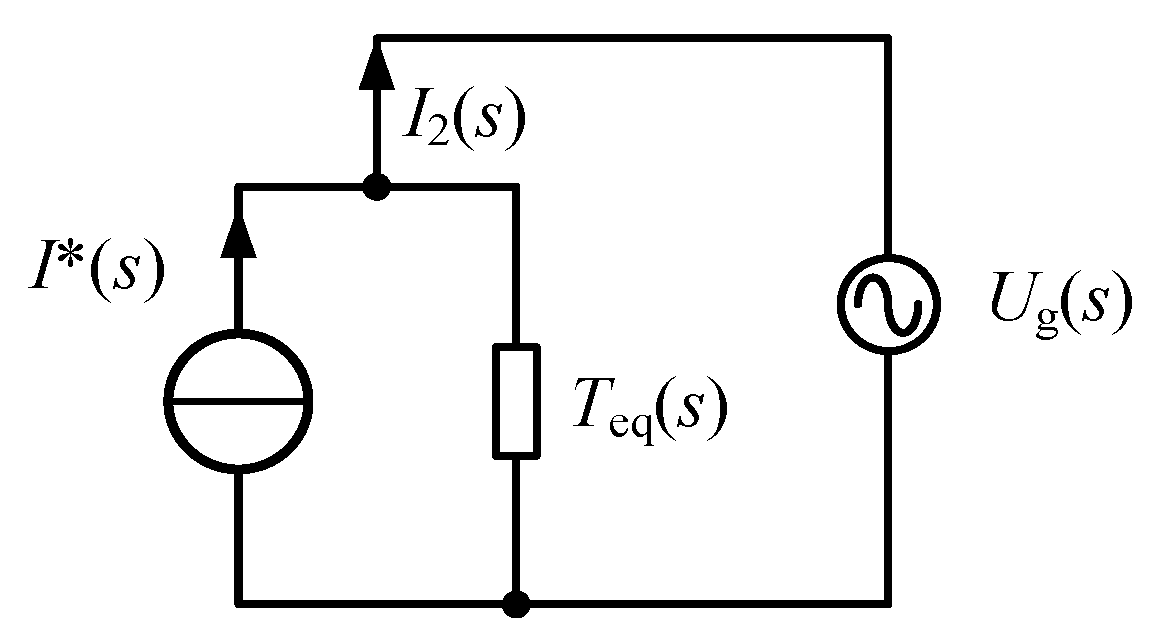
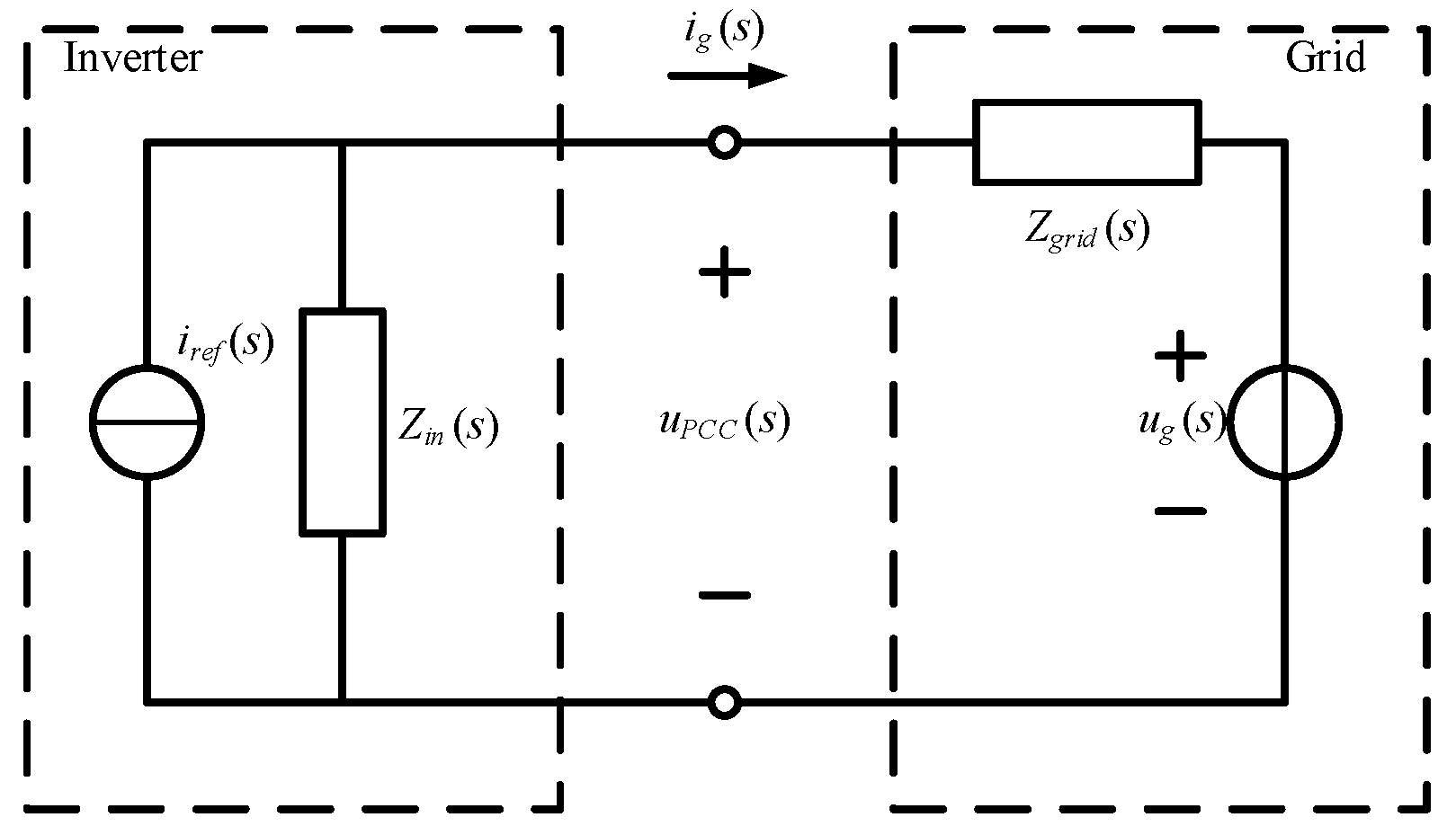
2.2.1. System Modeling
2.2.2. Small Signal Model Analysis
- (1)
- If the grid is strong (high independence), f(s) is close to 0 and F(s) is close to 1, meaning the system is always stable.
- (2)
- If the grid is weak (low independence), the system is only stable if certain conditions are met by f(s).
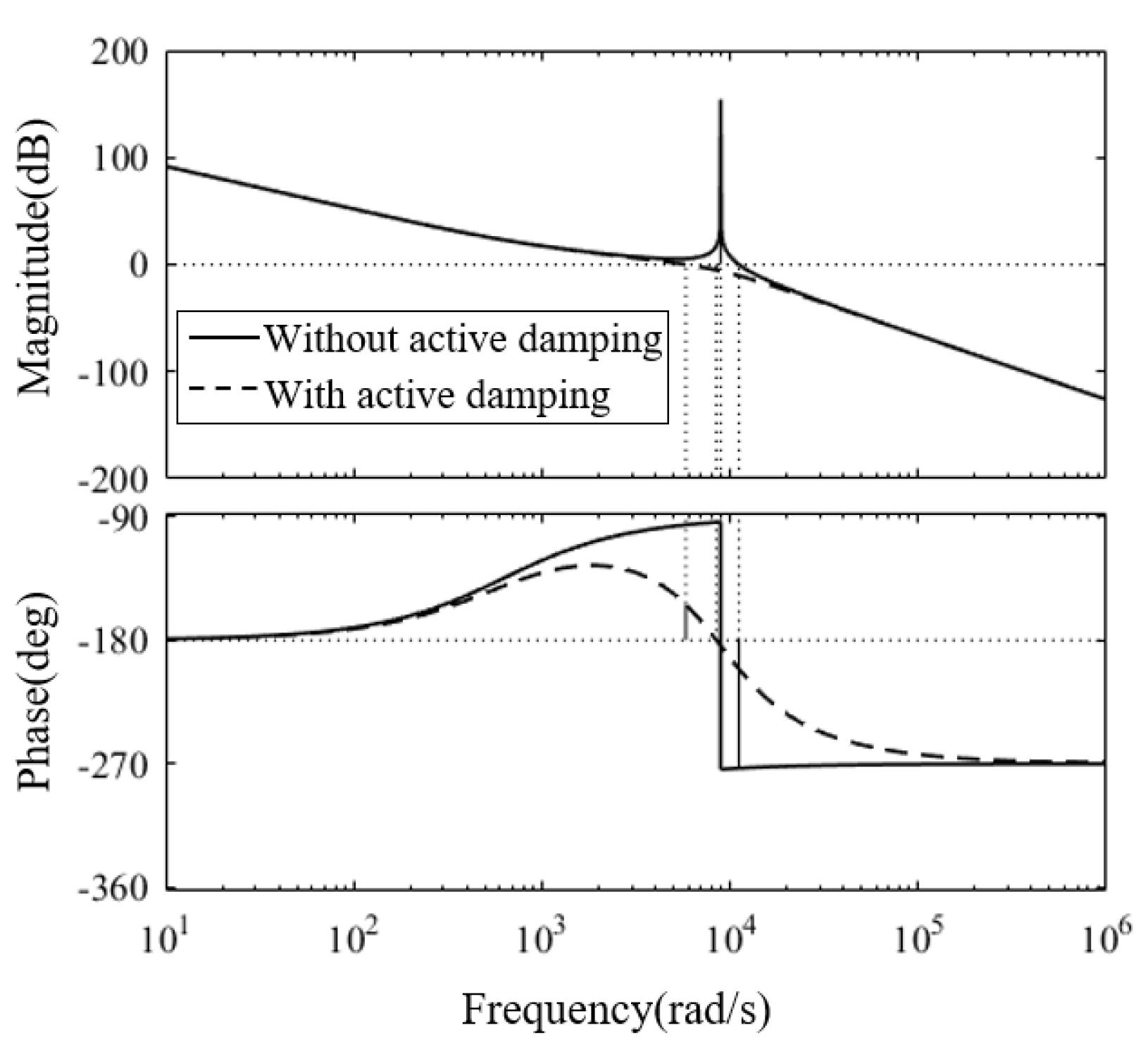
2.2.3. Stability Analysis
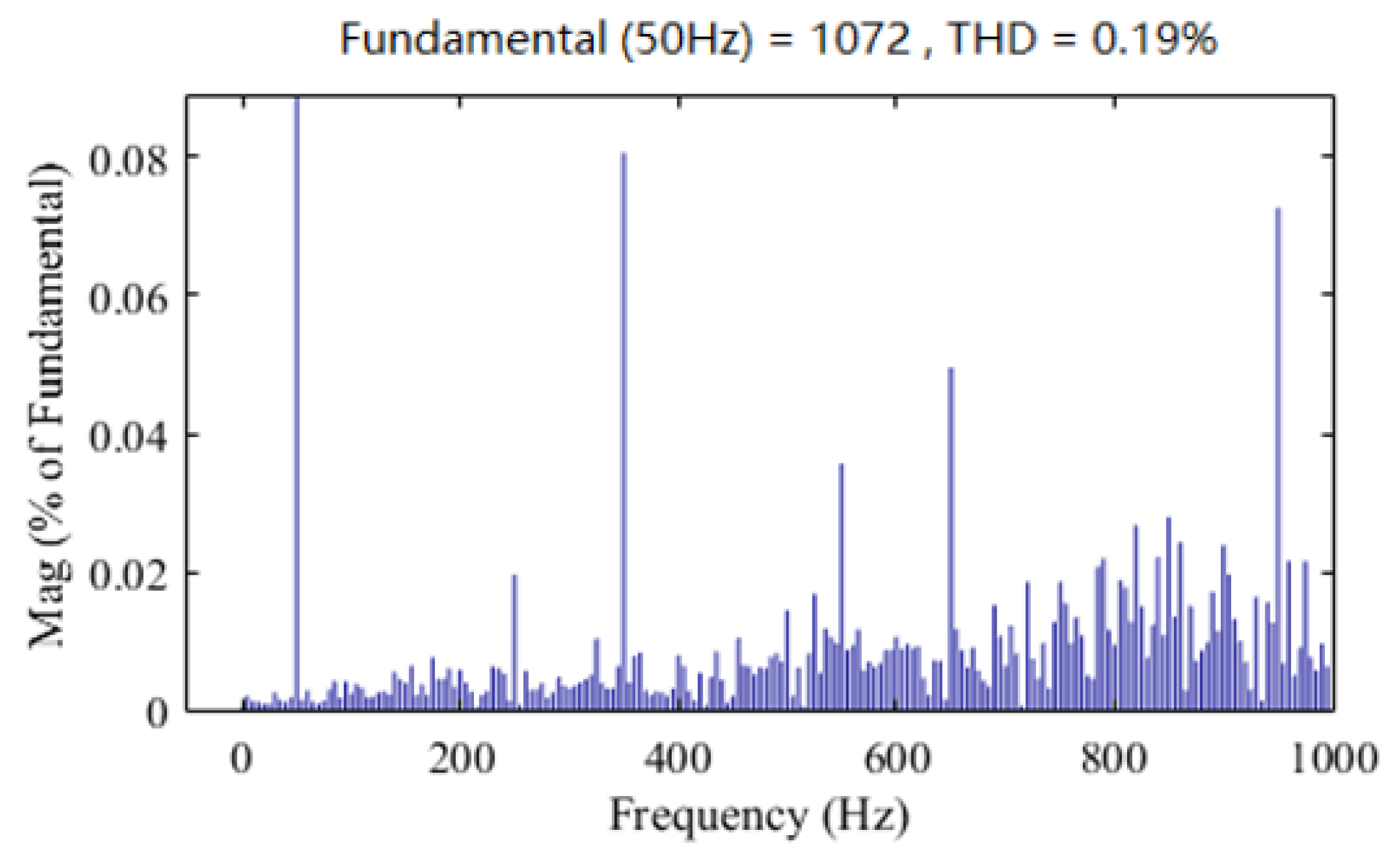
3. Results and Discussion
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Qian, Q.; Xie, S.; Huang, L.; Xu, J.; Zhang, Z.; Zhang, B. Harmonic Suppression and Stability Enhancement for Parallel Multiple Grid-Connected Inverters Based on Passive Inverter Output Impedance. IEEE Trans. Ind. Electron. 2017, 64, 7587–7598. [Google Scholar] [CrossRef]
- He, J.; Li, Y.W.; Bosnjak, D.; Harris, B. Investigation and Active Damping of Multiple Resonances in a Parallel-Inverter-Based Microgrid. IEEE Trans. Power Electron. 2013, 28, 234–246. [Google Scholar] [CrossRef]
- Agorreta, J.L.; Borrega, M.; López, J.; Marroyo, L. Modeling and Control of N-Paralleled Grid-Connected Inverters with LCL Filter Coupled due to Grid Impedance in PV Plants. IEEE Trans. Power Electron. 2011, 26, 770–785. [Google Scholar] [CrossRef]
- Siva Prasad, J.S.; Narayanan, G. Minimization of Grid Current Distortion in Parallel-Connected Converters through Carrier Interleaving. IEEE Trans. Ind. Electron. 2014, 61, 76–91. [Google Scholar] [CrossRef]
- Lu, M.; Wang, X.; Loh, P.C.; Blaabjerg, F. Interaction and aggregated modeling of multiple paralleled inverters with LCL filter. In Proceedings of the 2015 IEEE Energy Conversion Congress and Exposition (ECCE), Montreal, QC, Canada, 20–24 September 2015; pp. 1954–1959. [Google Scholar]
- He, J.; Li, Y.W. Generalized Closed-Loop Control Schemes with Embedded Virtual Impedances for Voltage Source Converters with LC or LCL Filters. IEEE Trans. Power Electron. 2012, 27, 1850–1861. [Google Scholar] [CrossRef]
- Xie, C.; Li, K.; Zou, J.; Guerrero, J.M. Passivity-Based Stabilization of LCL-Type Grid-Connected Inverters via a General Admittance Model. IEEE Trans. Power Electron. 2020, 35, 6636–6648. [Google Scholar] [CrossRef]
- Lu, M.; Wang, X.; Loh, P.; Blaabjerg, F. Resonance Interaction of Multiparallel Grid-Connected Inverters with LCL Filter. IEEE Trans. Power Electron. 2017, 32, 894–899. [Google Scholar] [CrossRef]
- Li, X.; Xing, X.; Qin, C.; Zhang, C.; Zhang, G. Design and Control Method to Suppress Resonance Circulating Current for Parallel Three-Level Rectifiers with Modified LCL Filter. IEEE Trans. Ind. Electron. 2021, 68, 7012–7023. [Google Scholar] [CrossRef]
- Yoon, C.; Bai, H.; Beres, R.N.; Wang, X.; Bak, C.L.; Blaabjerg, F. Harmonic stability assessment for multiparalleled, grid-connected inverters. IEEE Trans. Sustain. Energy 2016, 7, 1388–1397. [Google Scholar] [CrossRef] [Green Version]
- Wang, X.; Blaabjerg, F.; Loh, P.C. Passivity-based stability analysis and damping injection for multi-paralleled voltage source converters with LCL filters. IEEE Trans. Power Electron. 2017, 32, 8922–8935. [Google Scholar] [CrossRef] [Green Version]
- Teng, Y.; Wang, X.; Yu, H.; Yin, Q.; Ruan, X. Impedance regulation method to enhance robustness of LCL grid-connected inverter against grid impedance. Chin. J. Electr. Eng. 2015, 35 (Suppl. S1), 197–204. [Google Scholar]
- Wu, W.; He, Y.; Tang, T.; Blaabjerg, F. A New Design Method for the Passive Damped LCL and LLCL Filter-Based Single-Phase Grid-Tied Inverter. IEEE Trans. Ind. Electron. 2013, 60, 4339–4350. [Google Scholar] [CrossRef]
- Dong, D.; Wen, B.; Boroyevich, D.; Mattavelli, P.; Xue, Y. Analysis of phase-locked loop low-frequency stability in three-phase grid-connected power converters considering impedance interactions. IEEE Trans. Ind. Electron. 2015, 62, 310–321. [Google Scholar] [CrossRef]
- Chen, X.; Zhang, Y.; Wang, S.; Chen, J.; Gong, C. Impedance-phased dynamic control method for grid-connected inverters in a weak grid. IEEE Trans. Power Electron. 2017, 32, 274–283. [Google Scholar] [CrossRef]
- Lin, X.; Yu, J.; Yu, R.; Zhang, J.; Yan, Z.; Wen, H. Improving Small-Signal Stability of Grid-Connected Inverter under Weak Grid by Decoupling Phase-Lock Loop and Grid Impedance. IEEE Trans. Ind. Electron. 2022, 69, 7040–7053. [Google Scholar] [CrossRef]
- Tang, Y.; Loh, P.C.; Wang, P.; Choo, F.H.; Gao, F.; Blaabjerg, F. Generalized Design of High Performance Shunt Active Power Filter with Output LCL Filter. IEEE Trans. Ind. Electron. 2012, 59, 1443–1452. [Google Scholar] [CrossRef]
- Tang, M.; Pei, Z.; Shen, Y.; Wang, Q. Modeling and Stability Analysis of Multi-parallel Grid-Connected PCSs. In Proceedings of the 2021 IEEE/IAS Industrial and Commercial Power System Asia (I&CPS Asia), Chengdu, China, 18–21 July 2021; pp. 95–99. [Google Scholar]
- Liserre, M.; Blaabjerg, F.; Hansen, S. Design and Control of an LCL-Filter-Based Three-Phase Active Rectifier. IEEE Trans. Ind. Appl. 2005, 41, 1281–1291. [Google Scholar] [CrossRef]
- Ruan, X.; Wang, X.; Pan, D.; Yang, D.; Li, W.; Bao, C. Control Techniques for LCL-Type Grid-Connected Inverters; Springer Nature: Singapore, 2018; pp. 31–61. [Google Scholar]
- Dursun, M.; Döşoğlu, M.K. LCL Filter Design for Grid Connected Three-Phase Inverter. In Proceedings of the 2018 2nd International Symposium on Multidisciplinary Studies and Innovative Technologies (ISMSIT), Ankara, Turkey, 9–21 October 2018; pp. 1–4. [Google Scholar]
- Timbus, A.V.; Rodriguez, P.; Teodorescu, R.; Ciobotaru, M. Line Impedance Estimation Using Active and Reactive Power Variations. In Proceedings of the 2007 IEEE Power Electronics Specialists Conference, Orlando, FL, USA, 17–21 June 2007; pp. 1273–1279. [Google Scholar]
- Liu, F.; Zhou, Y.; Duan, S.; Yin, J.; Liu, B.; Liu, F. Parameter Design of a Two-Current-Loop Controller Used in a Grid-Connected Inverter System with LCL Filter. IEEE Trans. Ind. Electron. 2009, 56, 4483–4491. [Google Scholar]
- Xin, Z.; Wang, X.; Loh, P.C.; Blaabjerg, F. Grid-current feedback control for LCL-filtered grid converters with enhanced stability. IEEE Trans. Power Electron. 2017, 32, 3216–3228. [Google Scholar] [CrossRef]
- Cavazzana, F.; Caldognetto, T.; Mattavelli, P.; Corradin, M.; Toigo, I. Analysis of Current Control Interaction of Multiple Parallel Grid-Connected Inverters. IEEE Trans. Sustain. Energy 2018, 9, 1740–1749. [Google Scholar] [CrossRef]
- Nasiri, M.; Mobayen, S.; Faridpak, B.; Fekih, A.; Chang, A. Small-Signal Modeling of PMSG-Based Wind Turbine for Low Voltage Ride-through and Artificial Intelligent Studies. Energies 2020, 13, 6685. [Google Scholar] [CrossRef]
- Pan, D.; Ruan, X.; Wang, X.; Yu, H.; Xing, Z. Analysis and design of current control schemes for LCL-type grid-connected inverter based on a general mathematical model. IEEE Trans. Power Electron. 2017, 32, 4395–4410. [Google Scholar] [CrossRef]
- Sun, J. Impedance-based stability criterion for grid-connected inverters. IEEE Trans. Power Electron. 2011, 26, 3075–3078. [Google Scholar] [CrossRef]
- Pokharel, M.; Ho, C.N.M. Stability Analysis of Power Hardware-in-the-Loop Architecture with Solar Inverter. IEEE Trans. Ind. Electron. 2021, 68, 4309–4319. [Google Scholar] [CrossRef]






















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbols | Meanings | Values |
|---|---|---|
| P | Power rating | 500 kW |
| Ug | RMS of grid phase voltage | 220 V |
| Udc | DC side voltage | 780 V |
| L1 | PCS side filter inductor | 0.25 mH |
| L2 | Grid side filter inductor | 0.08 mH |
| C | Filter capacitor | 220 uF |
| Lg | Grid-connected inductor | 0.003 mH |
| Hi | Capacitor current feedback coefficient | 5 |
| fsw | PCS switching frequency | 10 kHz |
| kp | Current controller proportional coefficient | 10 |
| ki | Current controller integral coefficient | 1000 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xu, X.; Yao, W.; Xie, G. A Damping Control Strategy to Improve the Stability of Multi-Parallel Grid-Connected PCSs. Energies 2023, 16, 4633. https://doi.org/10.3390/en16124633
Xu X, Yao W, Xie G. A Damping Control Strategy to Improve the Stability of Multi-Parallel Grid-Connected PCSs. Energies. 2023; 16(12):4633. https://doi.org/10.3390/en16124633
Chicago/Turabian StyleXu, Xiaoyi, Wenxi Yao, and Gang Xie. 2023. "A Damping Control Strategy to Improve the Stability of Multi-Parallel Grid-Connected PCSs" Energies 16, no. 12: 4633. https://doi.org/10.3390/en16124633