
Research on the Magnetostrictive Characteristics of Transformers under DC Bias

Abstract
:1. Introduction
2. J–A Theory
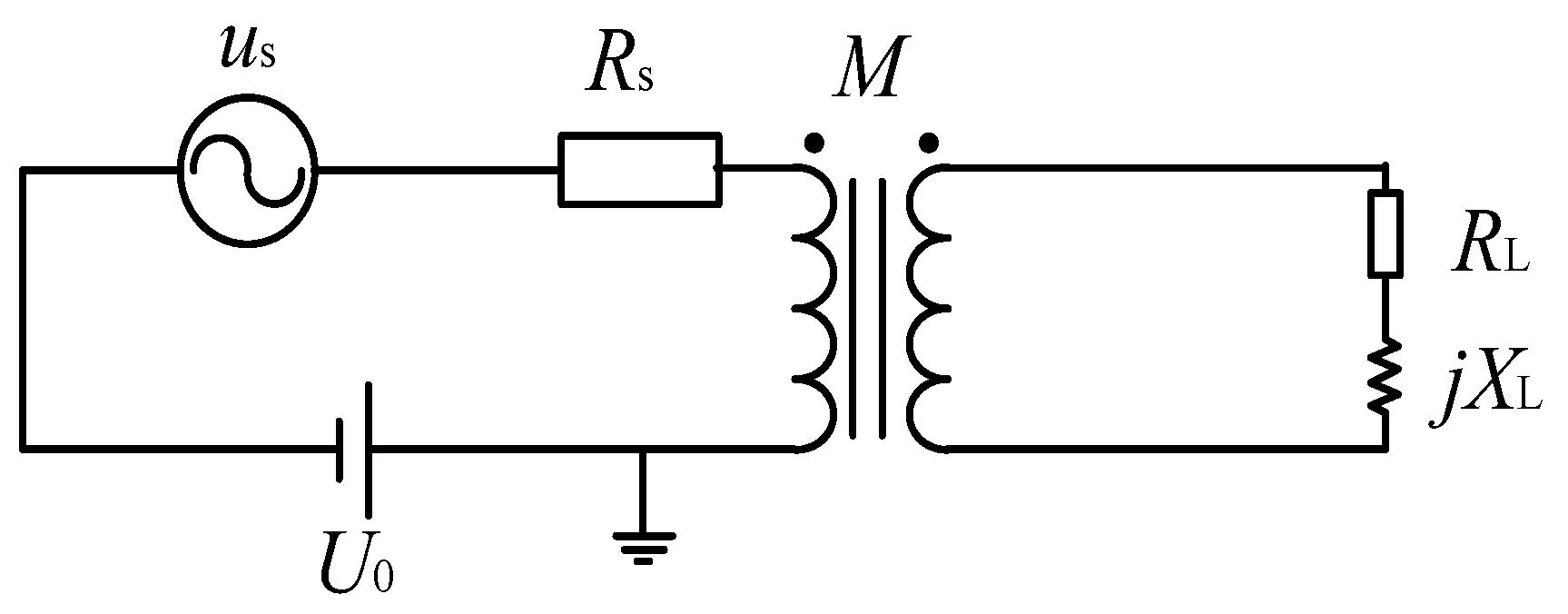
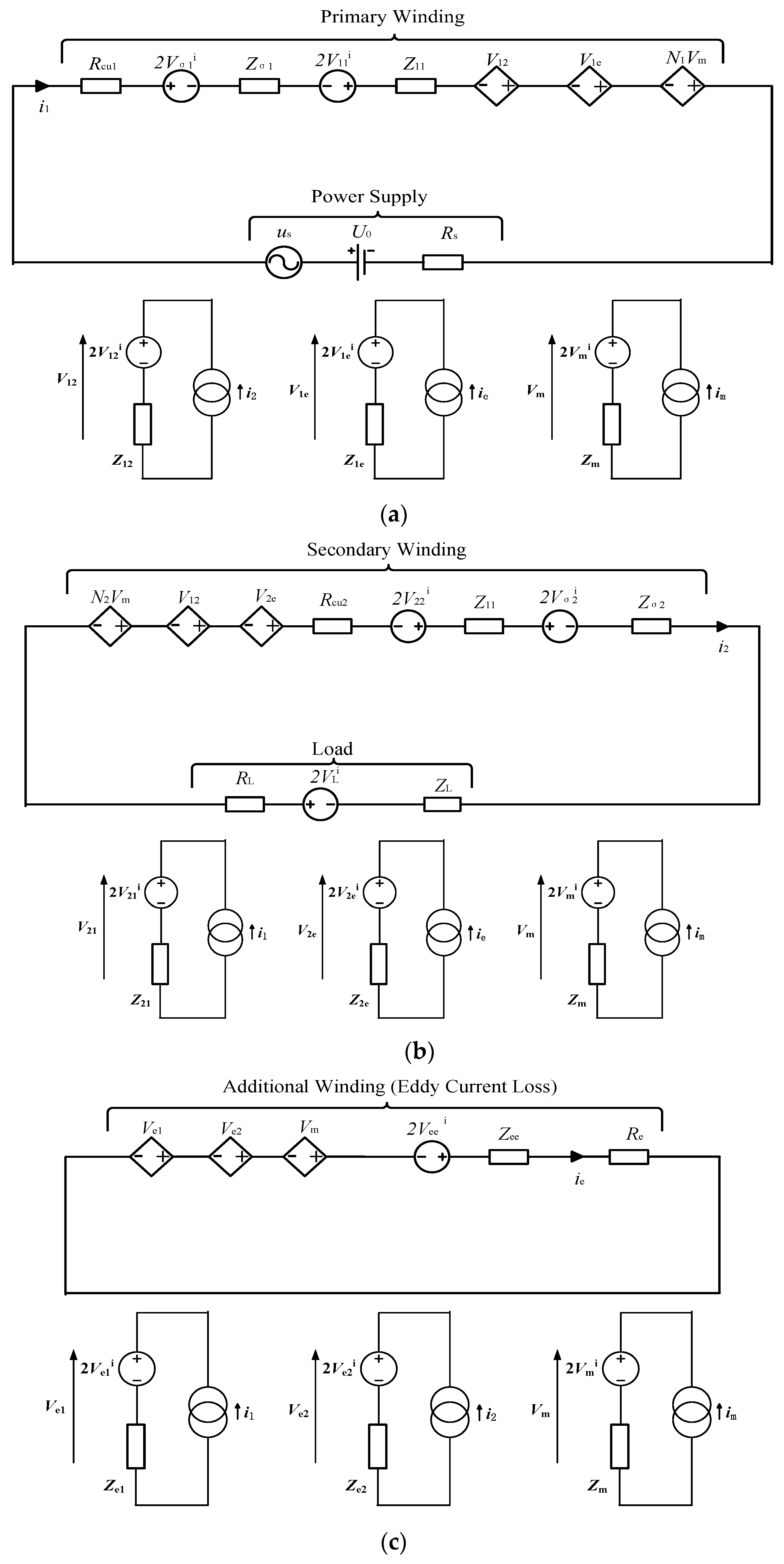
3. TLM of a Single-Phase Transformer
4. Results
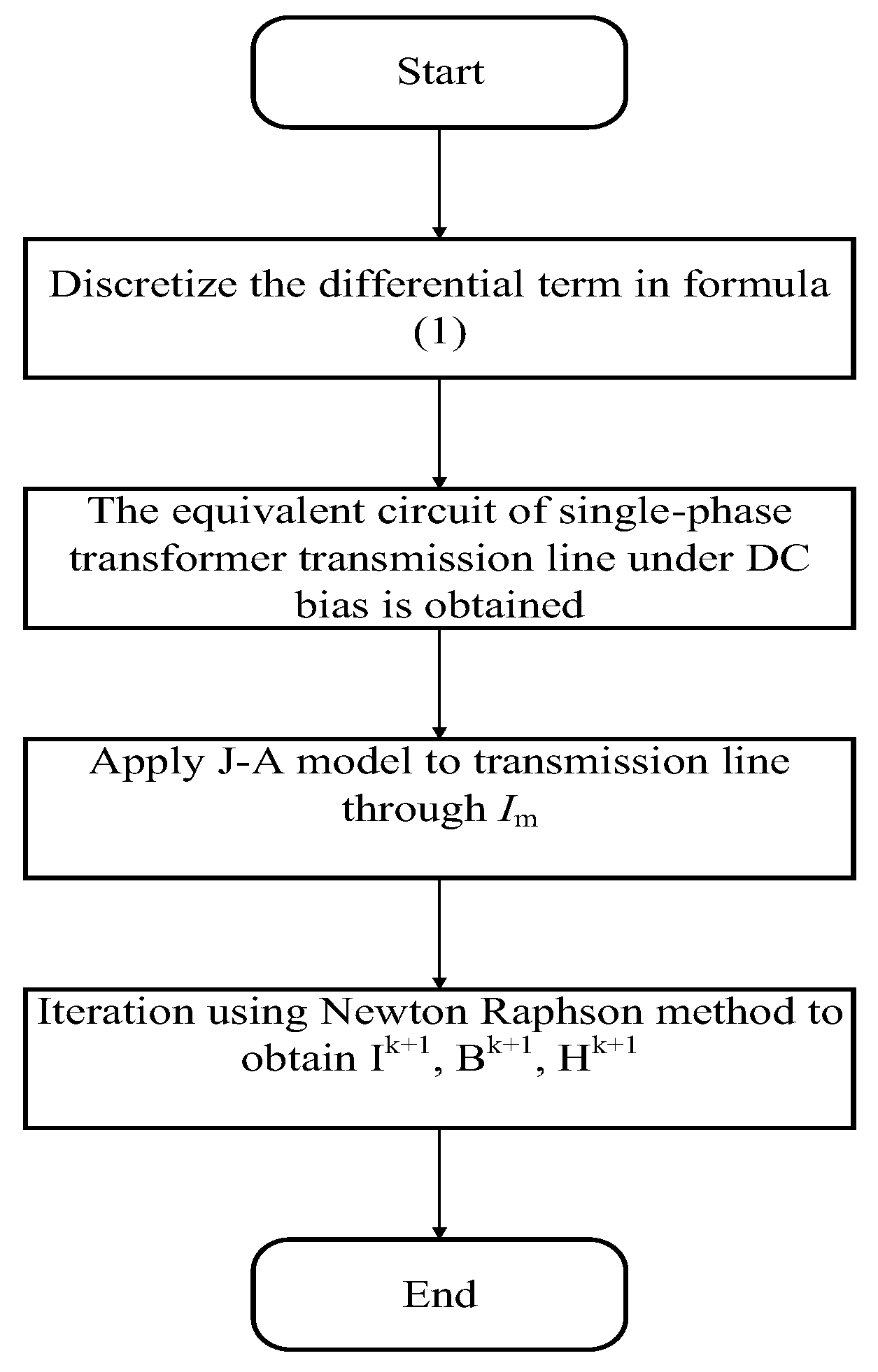
4.1. Solution of the TLM
4.2. Calculation Results
5. Conclusions
- (1)
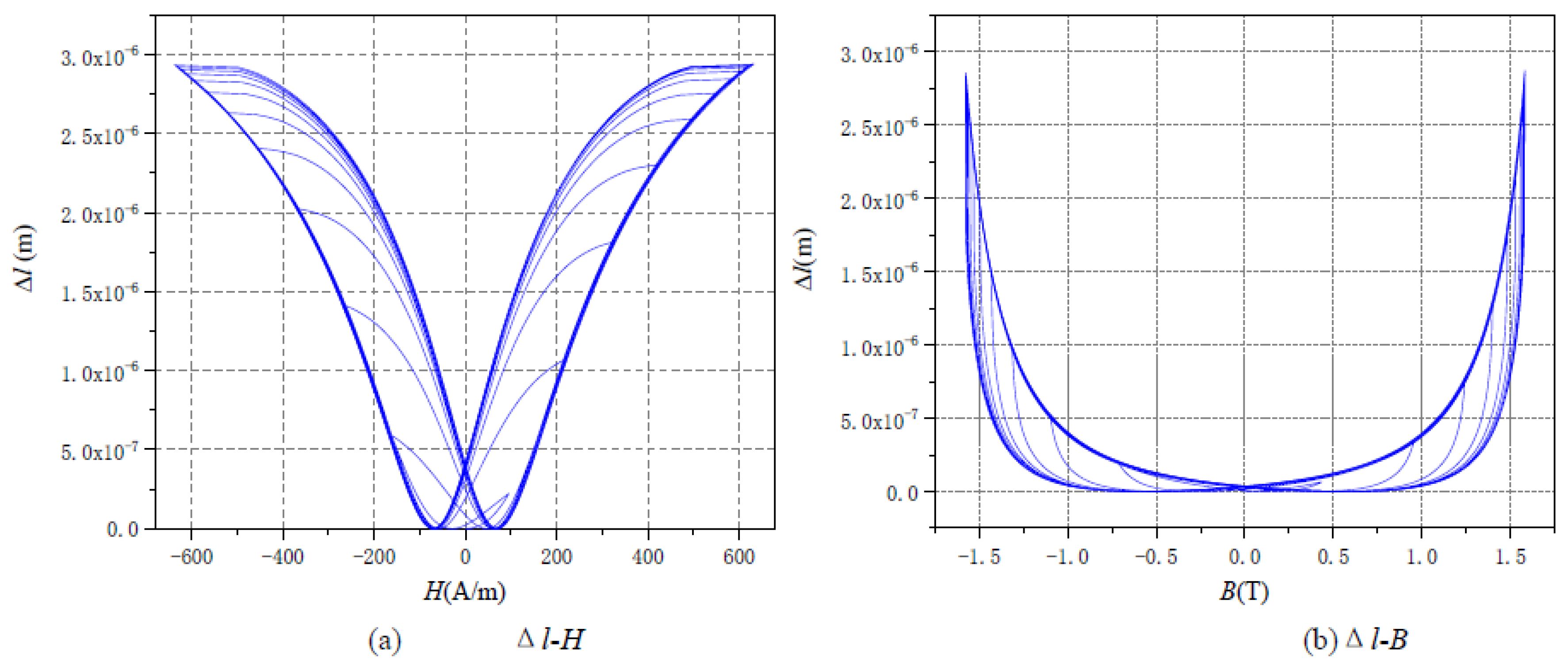
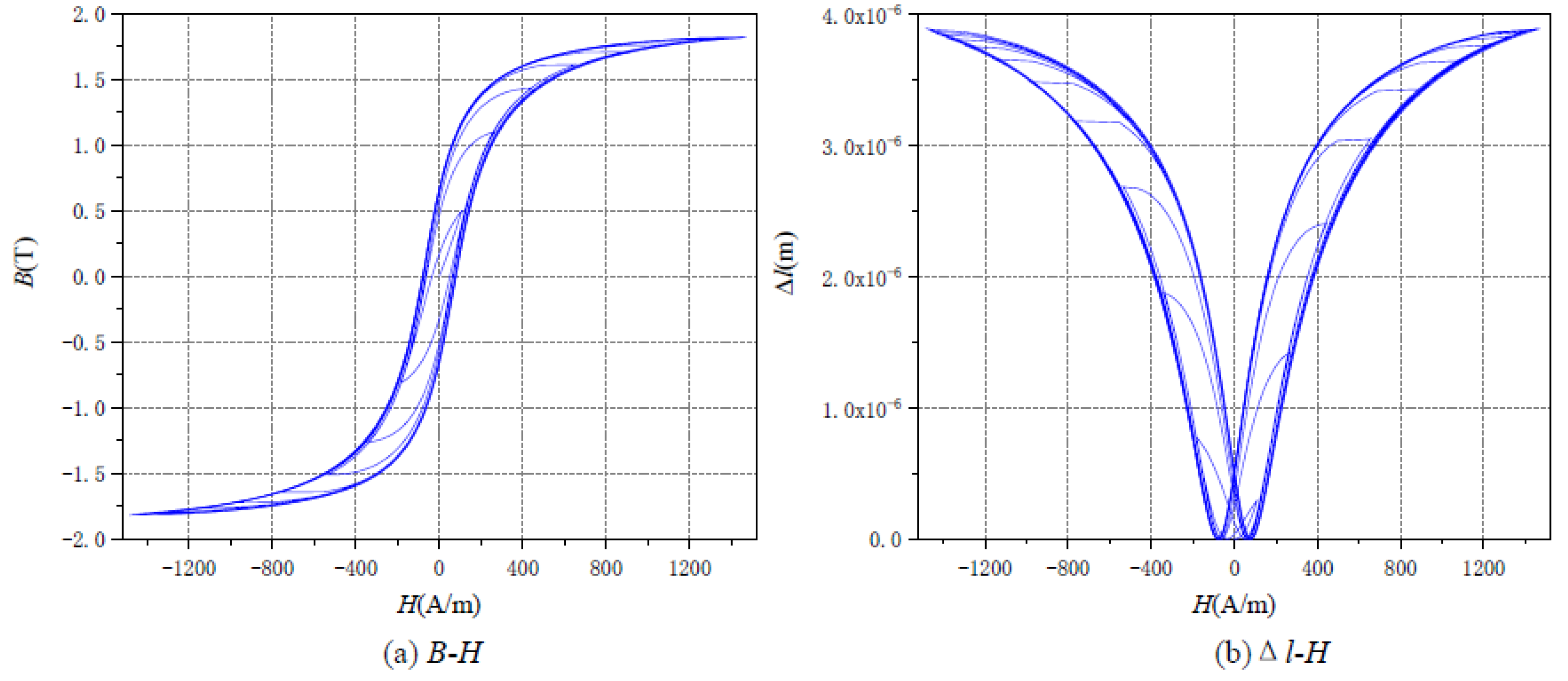
- When there was no DC bias, the curves of the relationship between the magnetostrictive deformation and the magnetic field showed butterfly shapes, indicating that the magnetostriction had hysteresis characteristics relative to the magnetic field.
- (2)
- The left and right wings of the deformation curves were symmetrical about the magnetic field. When the peak value of the AC voltage increased to a certain extent, the deformation curve bent, which shows that the magnetostriction also had saturation characteristics.
- (3)
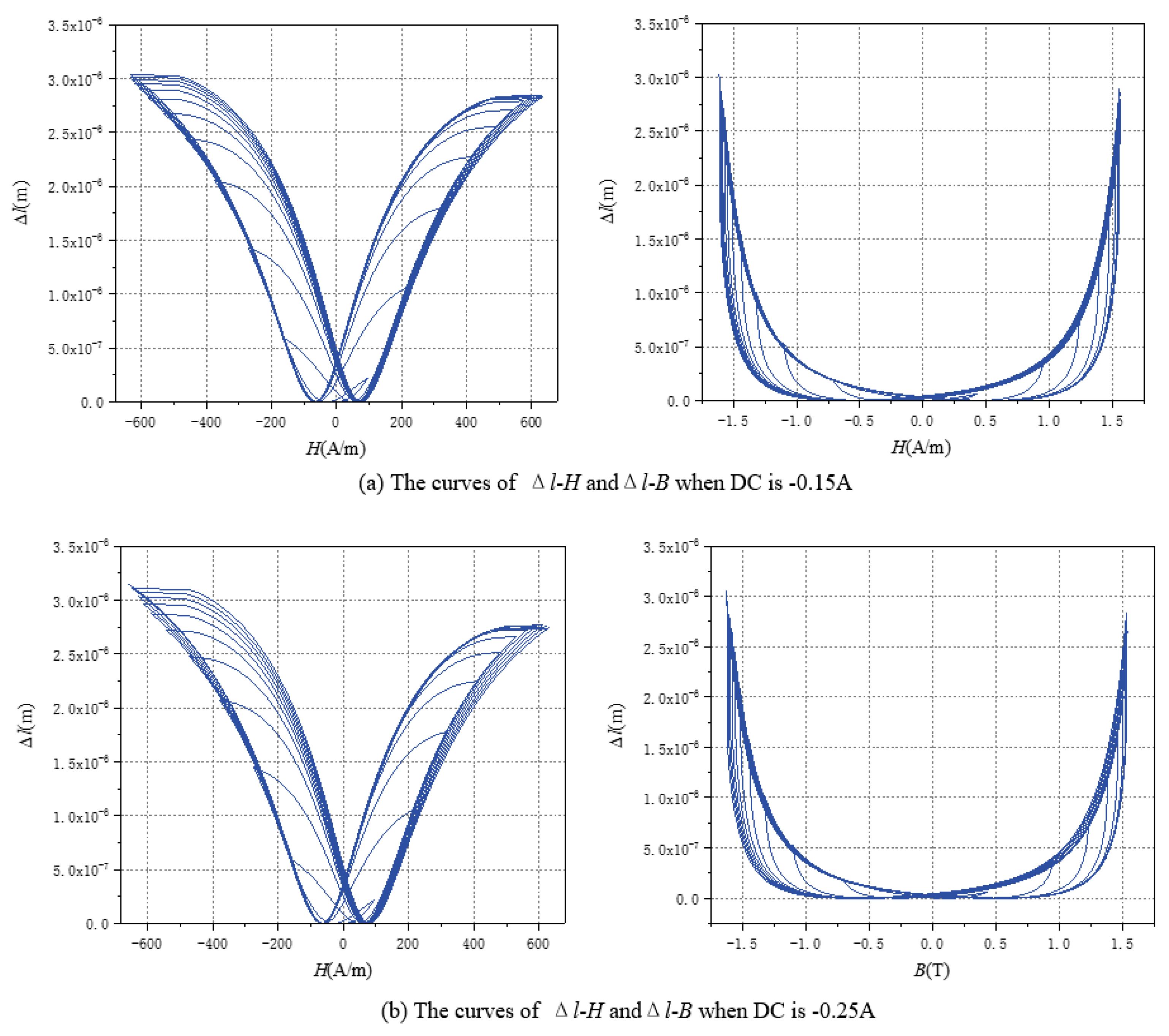
- The left and right wings of the magnetostrictive deformation curves lost symmetry; that is, one became larger and the other faded under DC bias. Compared with the case without DC bias, the differences between the maximum values of the two wings increased, and the sensitivity of the magnetostrictive deformation to the change in the AC signal enhanced under the influence of the DC bias.
- (4)
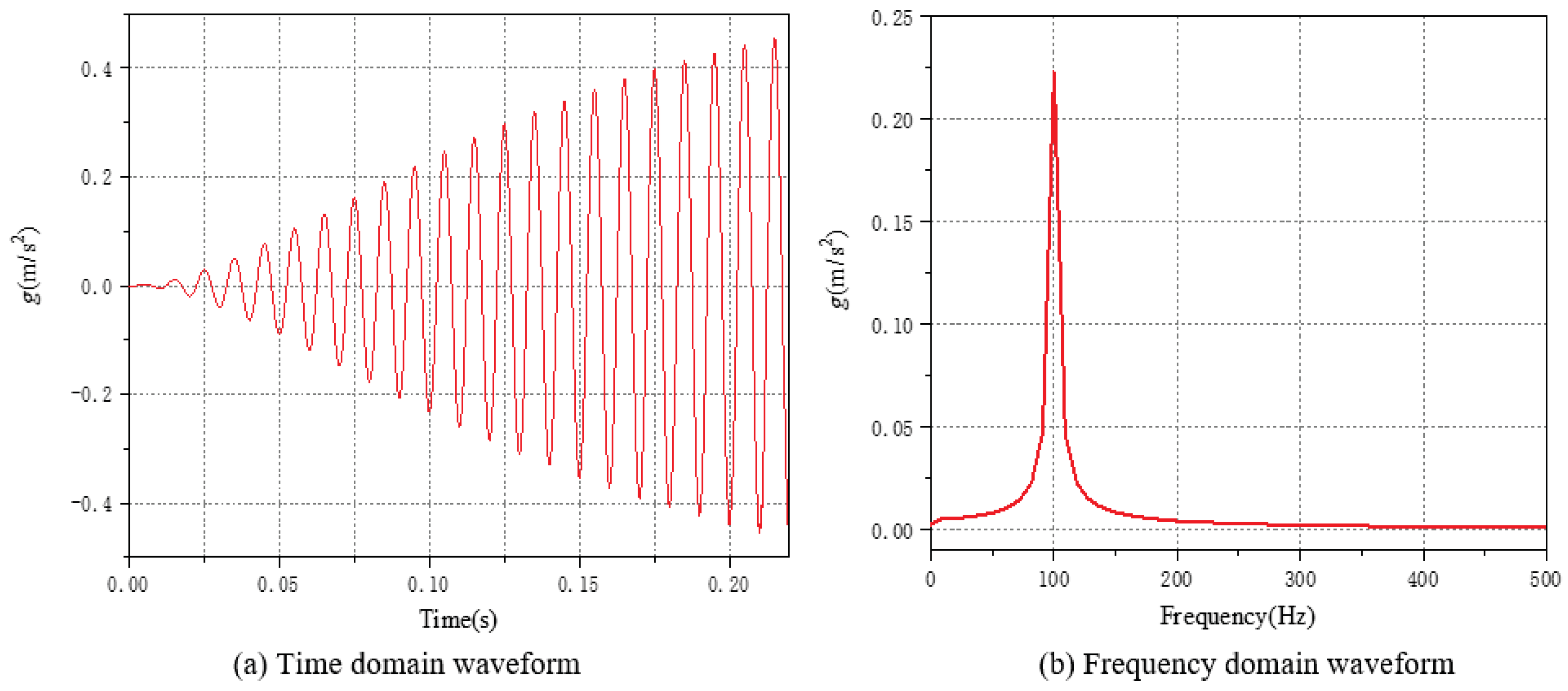
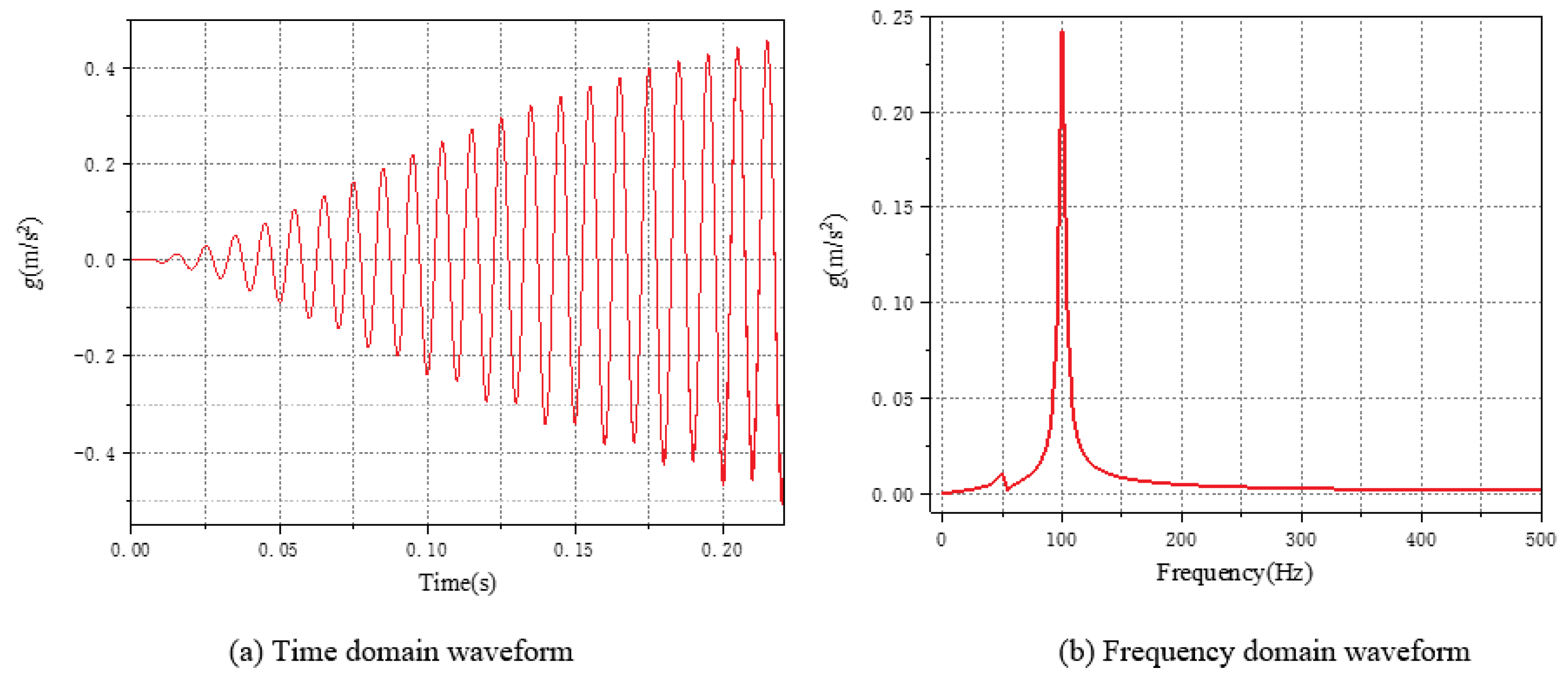
- The amplitude of the vibration acceleration was concentrated at 100 Hz; that is, compared with the applied voltage frequency, the frequency of the vibration doubled. When there was DC bias, the amplitude at 100 Hz increased significantly. At the same time, a small wave peak appeared at 50 Hz.
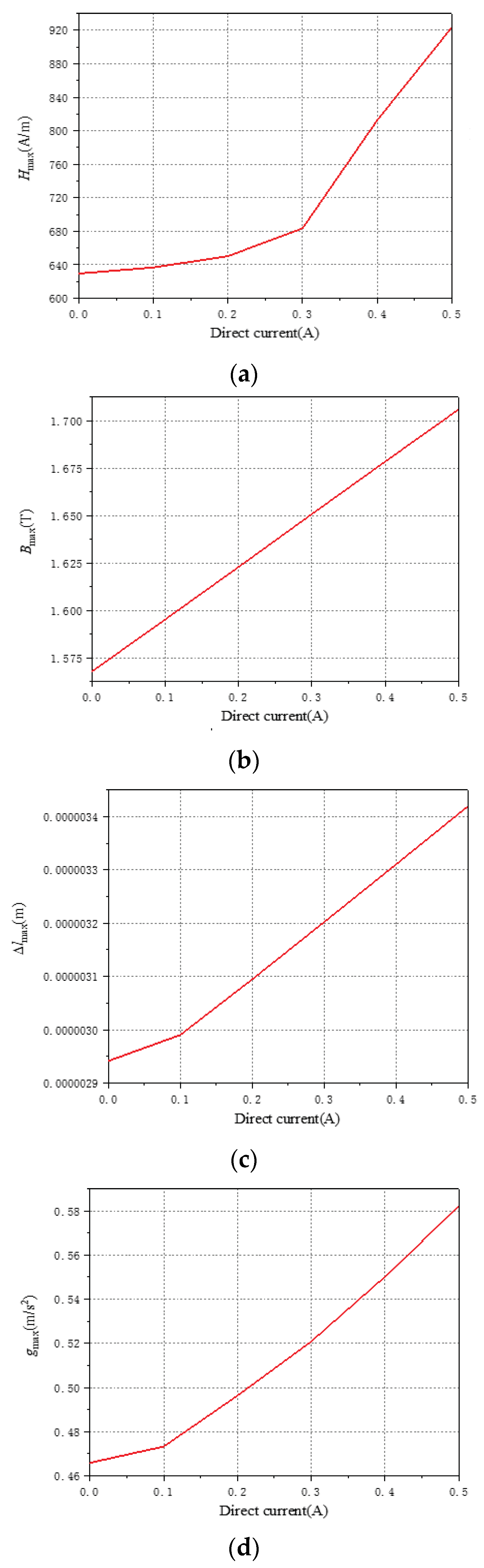
- (5)
- The magnetic field, magnetostrictive deformation, and vibration acceleration basically changed linearly with the increase in the DC. There were inflection points at 0.3 A DC for the magnetic field intensity curve and at 0.1 A DC for the magnetostrictive deformation and vibration acceleration curves. After these inflection points, the curves become obviously steeper, which suggests that the effect of the DC on them became significantly stronger.
- (6)
- The main research object of this article was single-phase transformers. The three-phase transformer group can be regarded as three single-phase transformers, so the uniform transmission line model (TLM) based on J–A theory can be used to study the electromagnetic and vibration characteristics of three-phase transformers.
- (7)
- Transformer DC bias affects the magnetostrictive properties of the core, which increases transformer vibration and noise. This paper provides theoretical ideas for finding measures to suppress DC bias, as well as transformer noise reduction measures.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| us | AC voltage |
| U0 | DC voltage |
| Rs | internal resistance of the power supply |
| M | mutual inductance |
| RL | resistance of the load |
| XL | inductance of the load |
| Re | additional resistance |
| A | core area |
| Μ | core permeability |
| σfe | core conductivity |
| l | magnetic path length |
| Vc | core volume |
| Kfe | coefficient |
| T | thickness of the SSS |
| i1 | primary current |
| i2 | secondary current |
| ie | the current of the additional winding |
| im | exciting current |
| N1 | primary winding turns |
| N2 | secondary winding turns |
| Rcu1 | primary winding resistance |
| Rcu2 | secondary winding resistance |
| Lm | exciting inductance (Lm = μA/l) |
| Lσ1 | leakage inductance of the primary winding |
| Lσ2 | leakage inductance of the secondary winding |
| L11 | self-inductance of the primary winding (L11 = μN12A/l) |
| L22 | the self-inductance of the secondary winding (L22 = μN22A/l) |
| Lee | self-inductance of the additional winding (Lee = μA/l) |
| M12/M21 | the mutual inductance of the primary and secondary winding (M12 = M21 = μN2N1A/l) |
| M1e/Me1 | mutual inductance of the primary and additional winding (M1e = Me1 = μN1A/l) |
| M2e/Me2 | mutual inductance of the secondary and additional winding(M2e = Me2 = μN2A/l) |
| ian | anhysteretic magnetization component |
| iirr | irreversible magnetization component |
| βc | weighting coefficient |
| is | component of saturation magnetization |
| α | coefficient of interdomain coupling |
| a | nonhysteretic magnetization form factor |
| ZK | characteristic impedances (subscript K includes 11, 22, ee, σ1, σ2, 12, 21, 1e, e1, 2e, e2, m, L) |
| Vki | voltage of the incident pulse |
| VX | voltage of the mutual inductance (subscript X includes 12, 21, 1e, e1, 2e, e2) |
| Vm | voltage of the magnetization component |
References
- Pan, C.; Wang, C.; Su, H. Excitation Current and Vibration Characteristics of DC Biased Transformer. CSEE J. Power Energy Syst. 2021, 7, 604–613. [Google Scholar]
- Wang, Y.; Gao, C.; Li, L. Study for Influence of Harmonic Magnetic Fields on Vibration Properties of Core of Anode Saturable Reactor in HVDC Converter Valve System. IEEE Access 2021, 9, 24050–24059. [Google Scholar] [CrossRef]
- Liu, C.; Li, X.; Li, X. Simulating the vibration increase of the transformer iron core due to the DC bias. Int. J. Appl. Electromagn. Mech. 2017, 55, 423–433. [Google Scholar] [CrossRef]
- Li, Y.; Zhu, J.; Zhu, L. A Dynamic Magnetostriction Model of Grain-Oriented Sheet Steels Based on Becker-Döring Crystal Magnetization Model and Jiles-Atherton Theory of Magnetic Hysteresis. IEEE Trans. Magn. 2020, 56, 7511405. [Google Scholar] [CrossRef]
- Lu, W.; Lei, G. Vibration and noise of oil-immersed auto-transformers. J. Vib. Shock. 2019, 38, 273–280. [Google Scholar]
- Somkun, S.; Moses, A.J.; Anderson, P.I. Measurement and modeling of 2-D magnetostriction of nonoriented electrical steel. IEEE Trans. Magn. 2012, 48, 711–714. [Google Scholar] [CrossRef]
- Zhang, Y.; Wang, J.; Bai, B. Influence Analysis of DC Biased Magnetic Field on Magnetostrictive Characteristics of Silicon Steel Sheet. Proc. CSEE 2016, 36, 4299–4307. [Google Scholar]
- Wang, J.; Bai, B.; Liu, H. Research on Vibration and Noise of Transformers under DC Bias. Trans. China Electrotech. Soc. 2015, 30, 56–61. [Google Scholar]
- Han, F.; Li, Y.; Jing, Y. Numerical Calculation of Magnetostrictive Force for EHV Transformer Core Silicon Steel. High Volt. Eng. 2017, 43, 980–986. [Google Scholar]
- He, Q.; Nie, J.; Zhang, S. Study of Transformer Core Vibration and Noise Generation Mechanism Induced by Magnetostriction of Grain-Oriented Silicon Steel Sheet. Shock. Vib. 2021, 2021, 8850780. [Google Scholar]
- Ben, T.; Chen, F.; Chen, L. An Improved Magnetostrictive Model of Non-oriented Electrical Steel Sheet Considering Force-magnetic Coupling Effect. Proc. CSEE 2021, 41, 5261–5370. [Google Scholar]
- Zhang, L.; Wang, G.; Dong, P. Study on the vibration of grain-oriented transformer core based on the intrinsic characteristics. Proc. CSEE 2016, 36, 3990–4001. [Google Scholar]
- Hu, J.; Liu, D.; Liao, Q.; Yan, Y.; Liang, S. Analysis of Transformer Electromagnetic Vibration Noise Based on Finite Element Method. J. Electr. Eng. Technol. 2016, 31, 81–88. [Google Scholar]
- Li, B.; Wang, Z.; Liu, H.; Li, H.; Liu, J. Experimental study of vibration noise of 500kV single-phase transformer under DC bias magnetism. J. Electr. Eng. Technol. 2021, 36, 2801–2811. [Google Scholar]
- Lobry, J.; Trecat, J.; Broche, C. The transmission line modeling (TLM) method as a new iterative technique in nonlinear 2-D magnetostatics. IEEE Trans. Magn. 1996, 32, 559–566. [Google Scholar] [CrossRef]
- Thomas, D.W.P.; John, P.; Okan, O. Time-Domain Simulation of Nonlinear Transformers Displaying Hysteresis. IEEE Trans. Magn. 2006, 42, 1820–1827. [Google Scholar] [CrossRef]
- Im, C.H.; Kim, H.K.; Le, C.H. Analysis of the three-phase transformer considering the nonlinear and anisotropic properties using the transmission line modeling method and FEM. IEEE Trans. Magn. 2001, 37, 3490–3493. [Google Scholar]
- Jiles, D.C.; Atherton, D.L. Theory of Ferromagnetic Hysteresis. J. Magn. Magn. Mater. 1986, 61, 48–60. [Google Scholar] [CrossRef]
- Jiles, D.C.; Thoelke, J.B.; Devine, M.K. Numerical Determination of Hysteresis Parameters for the Modeling of Magnetic Properties Using the Theory of Ferromagnetic Hysteresis. IEEE Trans. Magn. 1992, 28, 7–35. [Google Scholar] [CrossRef]
- Liu, Y.; Luo, X.; Zhu, H. Modeling plastic deformation effect on the hysteresis loops of ferromagnetic materials based on modified Jiles-Atherton model. Acta Phys. Sin. 2017, 66, 1–11. [Google Scholar]
- Luo, X.; Zhu, H.; Ding, Y. A modified model of magneto-mechanical effect on magnetization in ferromagnetic materials. Acta Phys. Sin. 2019, 68, 187501. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter Magnitude |
|---|
| Rated capacity: 33.3 KVA |
| Rated voltage: 230/5774 V |
| Rated current: 3.3/83.3 A |
| No load loss: 0.204 kw |
| Coil turns: 60/1575 |
| Short circuit impedance: 4% |
| Original winding resistance: 0.0087 Ω |
| Original winding inductance: 0.4 mH |
| Secondary winding resistance: 13 Ω |
| Secondary winding inductance: 254.7 mH |
| Maximum Amplitudes without DC | Differences of Maximum Amplitudes of Left and Right Wings without DC | Maximum Amplitudes of Right Wing when DC Is −0.25 A | Maximum Amplitudes of Left Wing when DC Is −0.25 A | Differences of Maximum Amplitudes of Left and Right Wings when DC Is −0.25 A | |
|---|---|---|---|---|---|
| Hmax (A/m) | 632 | 1264 | 620 | −656 | 1276 |
| Bmax (T) | 1.57 | 3.14 | 1.51 | −1.64 | 3.15 |
| ∆lmax (m) | 2.94199 × 10−6 | 0 | 2.92392 × 10−6 | 3.14789 × 10−6 | 0.22397 × 10−6 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yan, X.; Dong, X.; Han, G.; Yu, X.; Ma, F. Research on the Magnetostrictive Characteristics of Transformers under DC Bias. Energies 2023, 16, 4457. https://doi.org/10.3390/en16114457
Yan X, Dong X, Han G, Yu X, Ma F. Research on the Magnetostrictive Characteristics of Transformers under DC Bias. Energies. 2023; 16(11):4457. https://doi.org/10.3390/en16114457
Chicago/Turabian StyleYan, Xiaoli, Xia Dong, Guozheng Han, Xiaodong Yu, and Fengying Ma. 2023. "Research on the Magnetostrictive Characteristics of Transformers under DC Bias" Energies 16, no. 11: 4457. https://doi.org/10.3390/en16114457