1. Introduction
Energy generation for and the electrification of rural communities and farms are still some of the main socio-economic issues in developing countries. Especially for Sub-Sahara African countries, where it is estimated that a relatively small percentage of the rural population currently has access to electricity. In this context of rural energy generation and with the goal of climate change mitigation, distributed small-scale wind generator systems are an attractive option for independent AC or DC microgrids and can easily be deployed where there is no utility grid connection. However, reports have shown that these small-scale wind generator systems need to be more cost effective [
1,
2]; hence, there are currently incentives such as those outlined in [
3] to make small-scale wind energy technology more cost competitive.
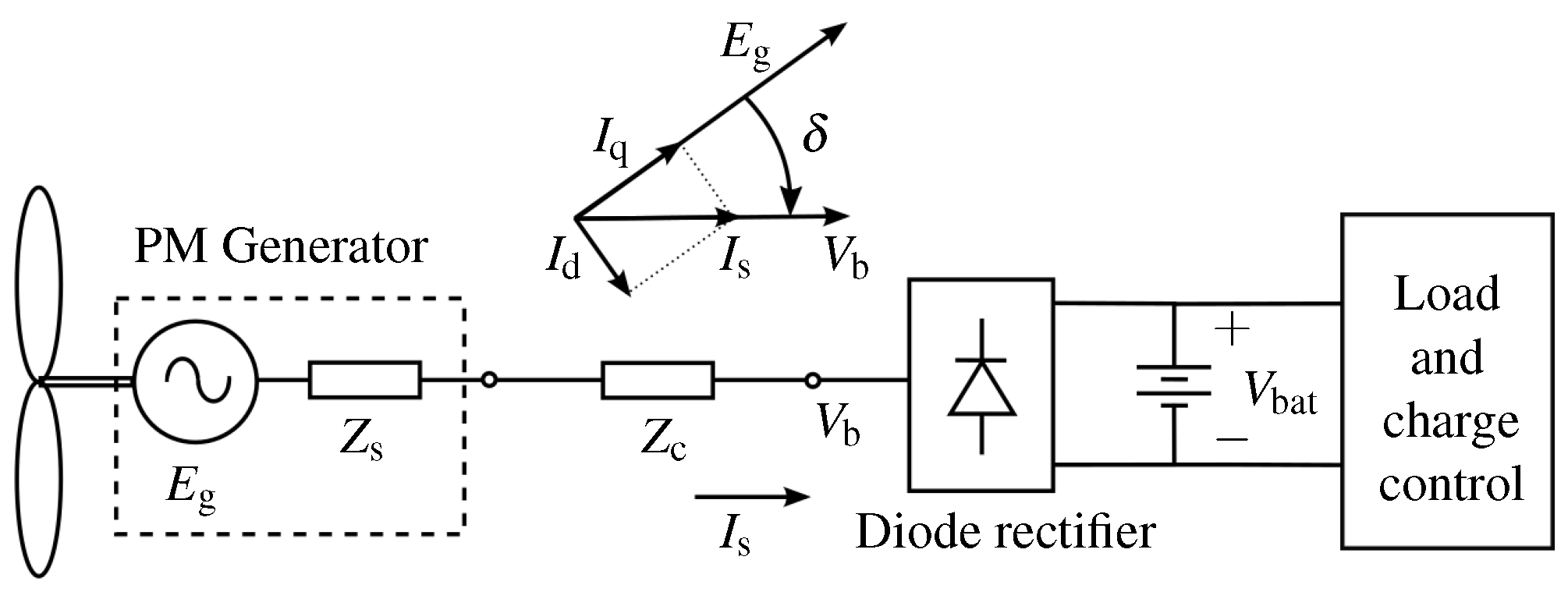
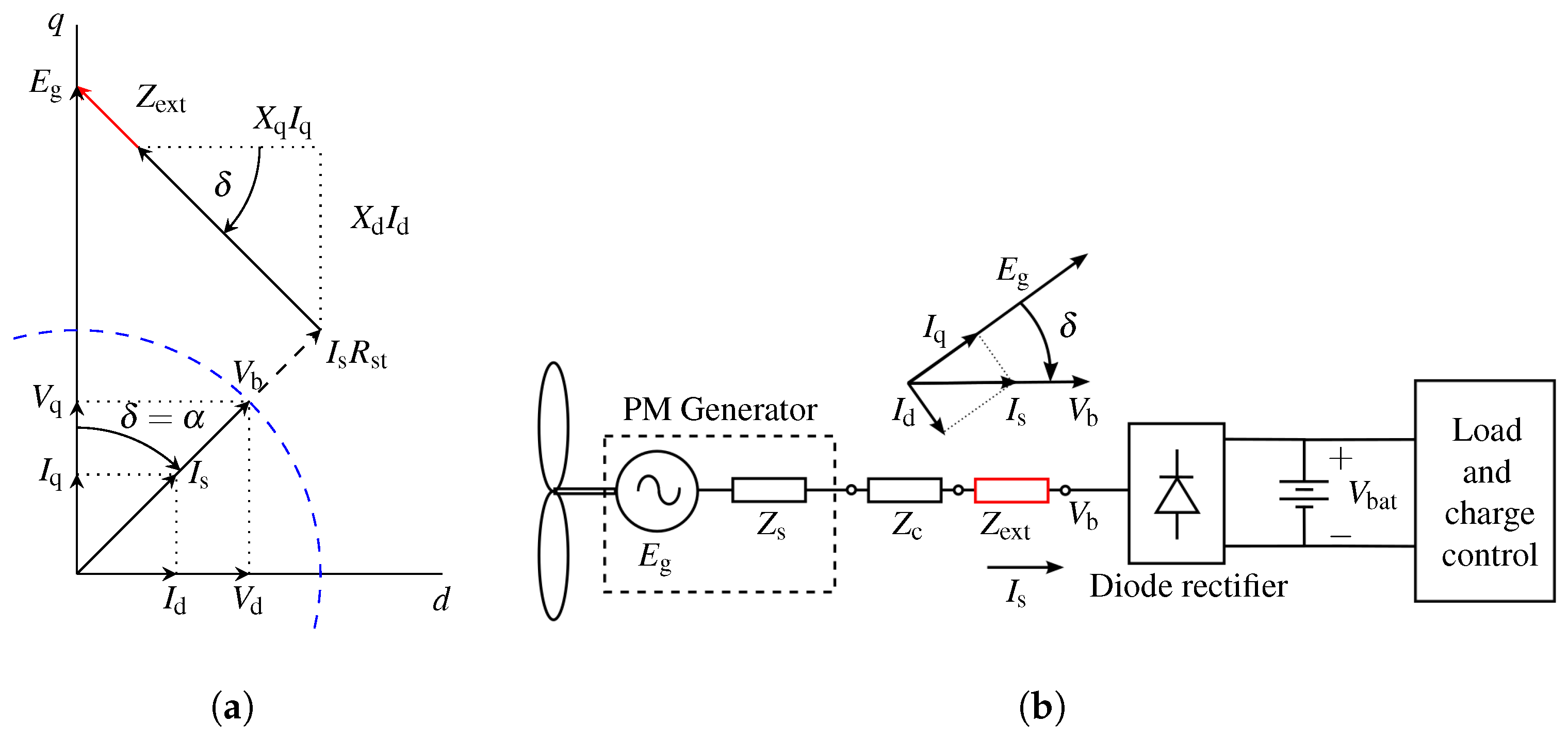
The small-scale uncontrolled passive wind generator system shown in
Figure 1 is ideal for these rural applications. In
Figure 1, only a diode bridge rectifier is used to directly connect the wind generator to the battery storage. Thus, the passive system uses minimal power electronics and is therefore conceivably more cost effective. The power electronics in small-scale wind energy systems are also the components most prone to failure [
4,
5]. The passive system in
Figure 1 is therefore potentially more reliable, also reducing the operation and maintenance costs. The preferred generator technology for these small-scale systems is the permanent magnet synchronous generator (PMSG) [
6]. However, because the system is uncontrolled, it is challenging to design the wind generator to have good power matching with the wind turbine. Therefore, the focus in this paper was on designing PMSGs for these small-scale passive wind energy systems.
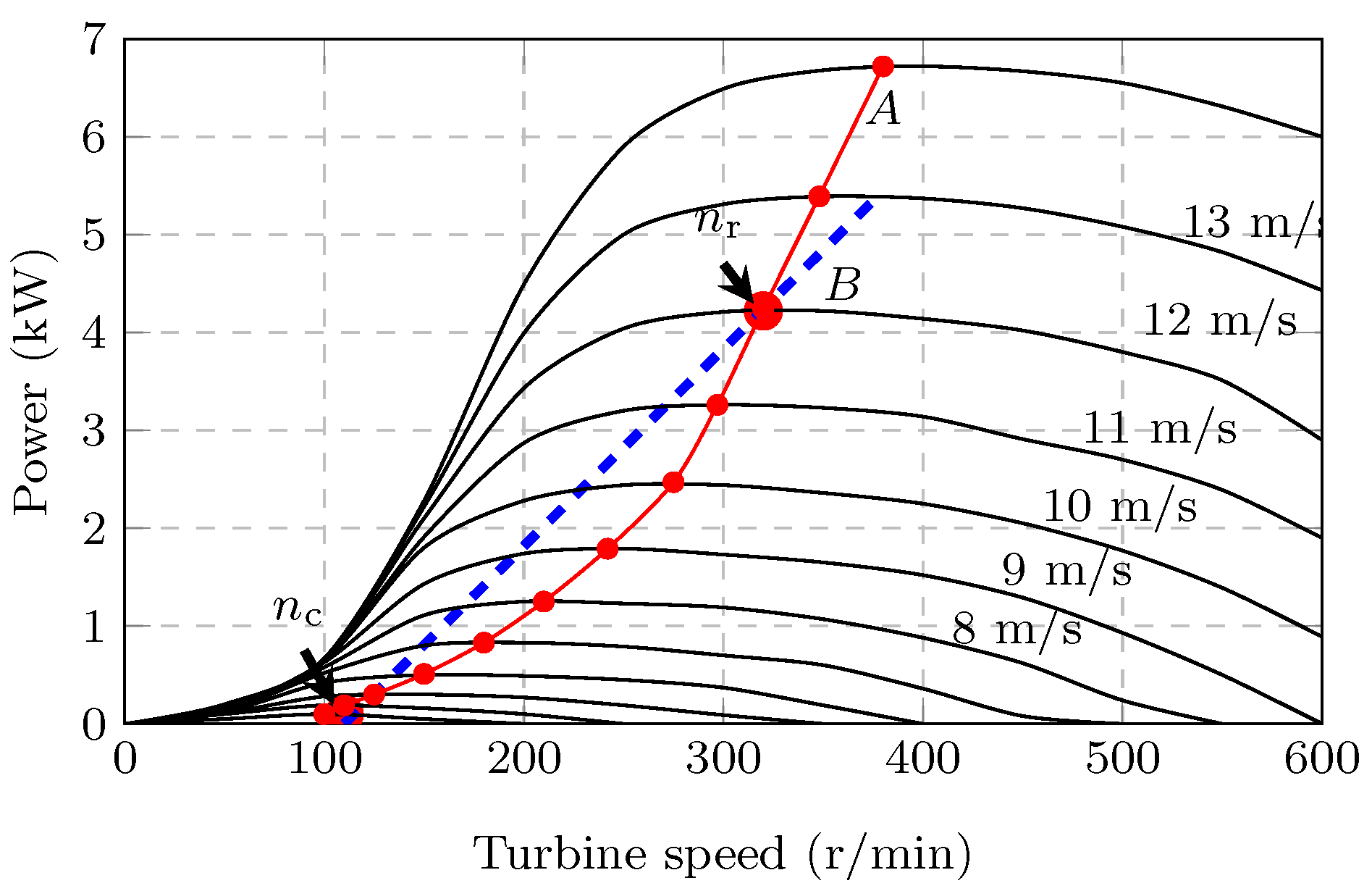
Small-scale wind generator systems are deployed according to the need, and not necessarily at the optimum wind site, as in the case of utility-scale wind farms. Therefore, it is imperative that the wind generator matches well the available power from the wind turbine at lower wind speeds. Failure in this regard was highlighted by [
7] as a major issue with current small-scale wind energy systems. Therefore, the design approach for the uncontrolled passive PMSGs, as in [
8,
9,
10], where the wind generator was optimally designed according to a perceived “typical wind cycle”, does not guarantee good power matching at low wind speeds and is not always considered ideal. In [
11], the wind turbine’s parameters were adjusted according to the generator to improve power matching. However, changing the wind turbine’s parameters is not desirable. The challenge then, when designing these PMSGs, is to ensure good power matching with the wind turbine at lower wind speeds, as well as maximum power matching at the rated wind speed. It should also be noted that the PMSGs in [
8,
9,
10,
11] were all for power ratings lower than
kW.
In terms of the design optimisation strategy for the PMSGs, there are multiple approaches found in the literature. As already discussed, there are those in [
8,
9,
10,
11] for a passive system. In a more general sense, the recent reviews in [
12,
13] on optimisation trends for electric machines highlighted that the use of genetic algorithms for multi-objective design optimisation approaches is favourable for design problems with several performance measures. Moreover, multi-objective design optimisation is the most common approach for wind generator design, e.g., [
14,
15,
16,
17]. In [
14,
15,
16,
17], the actively controlled wind generators with maximum power point tracking (MPPT) were optimised for a specified drive-cycle to maximise annual energy production. However, as outlined in the previous paragraph, site-specific design is not necessarily the best option for small-scale uncontrolled wind generators. The generators in these small-scale uncontrolled passive wind energy systems must be designed to be geographically independent. Therefore, in this case, the main design problem is to match the wind generator’s power with that of the wind turbine at lower wind speeds and at the specified rated operating point.
In [
18], a method of external impedance matching was used to match the wind generator’s power with the wind turbine, whereby an external inductance impedance was connected between the generator and the diode rectifier, shown in
Figure 1. Although this method can be used effectively, as was done in [
18,
19], the additional external inductor is an unwanted component to the system. This incentivised the investigation performed in [
20], which was to design PMSGs for a natural impedance matching the wind turbine, i.e., where the internal synchronous inductance of the PMSG alone was sufficient for good power matching. Hence, this paper is an extension of the work performed in [
18,
20] and forms part of an overarching study on PMSGs for passive wind generator systems.
In this paper, various methods of designing the PMSG to have an increased synchronous inductance for a natural impedance matching were investigated. These methods included altering the placement and orientation of the PMs in the rotor to change the magnetic saliency of the PMSG, as well as the stator slot’s structure to increase leakage flux. The various PMSG structures were designed for a sub-5 kW passive wind generator system, using a unique design methodology that ensured that the desired power matching with the wind turbine was achieved. The overall performance and cost effectiveness of the designed PMSGs were then evaluated to determine the optimal solution for this application. The results in this paper were validated with the experimental results of an optimally designed PMSG prototype.
4. Design and Optimisation
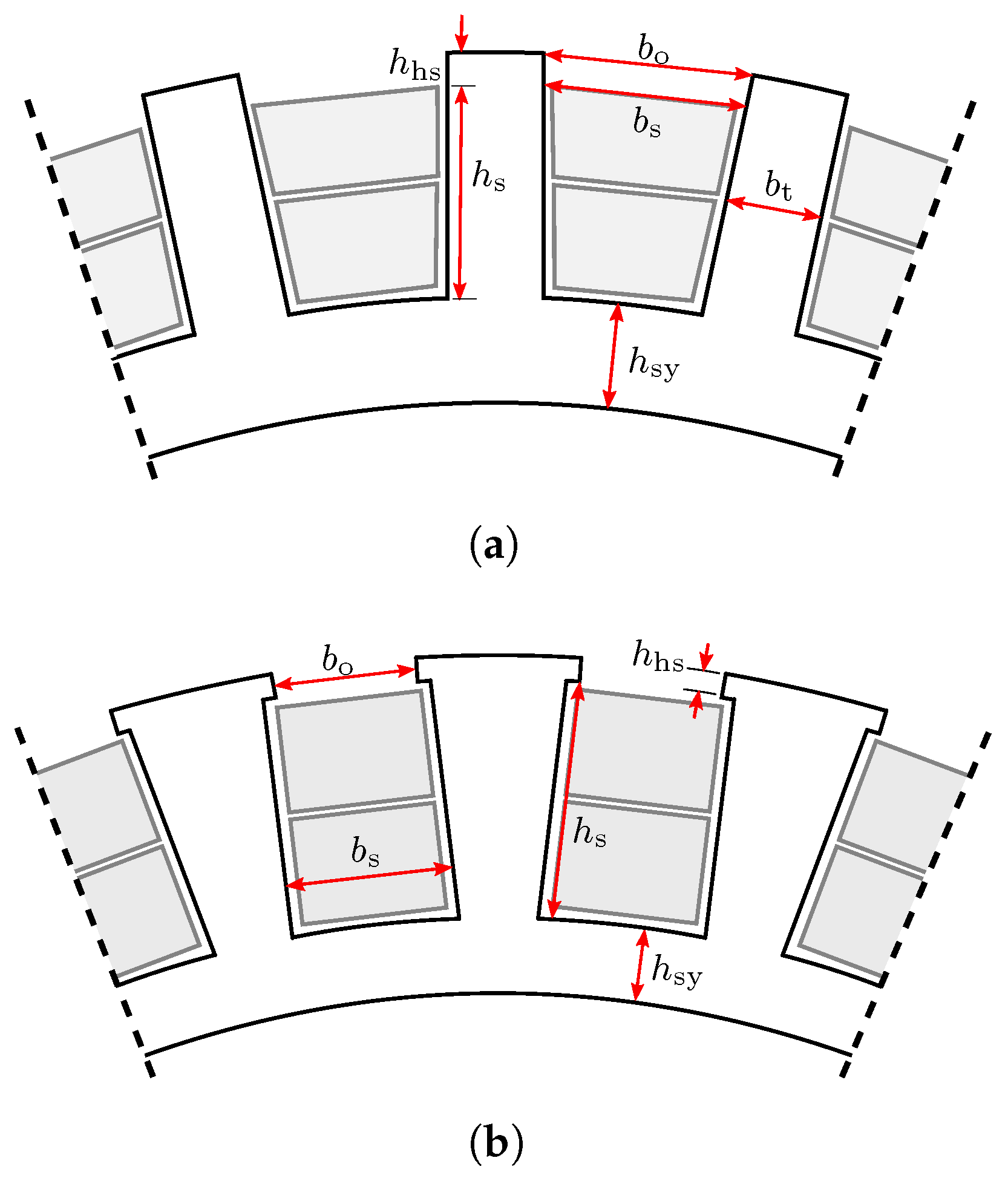
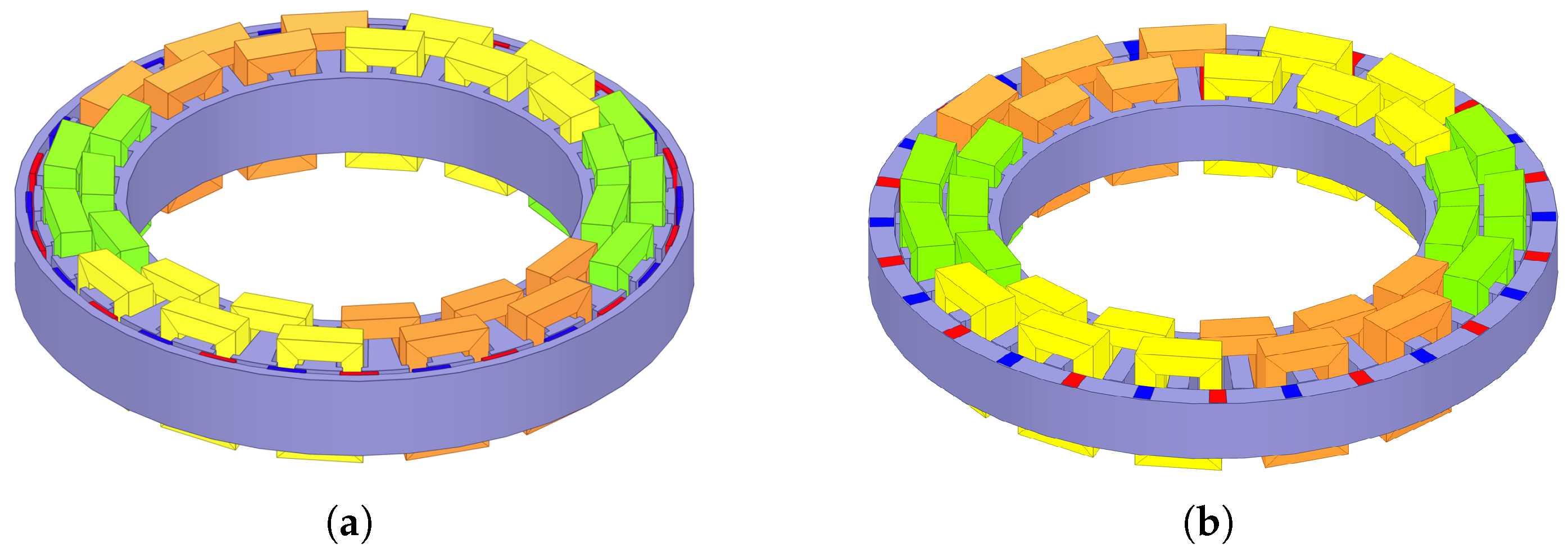
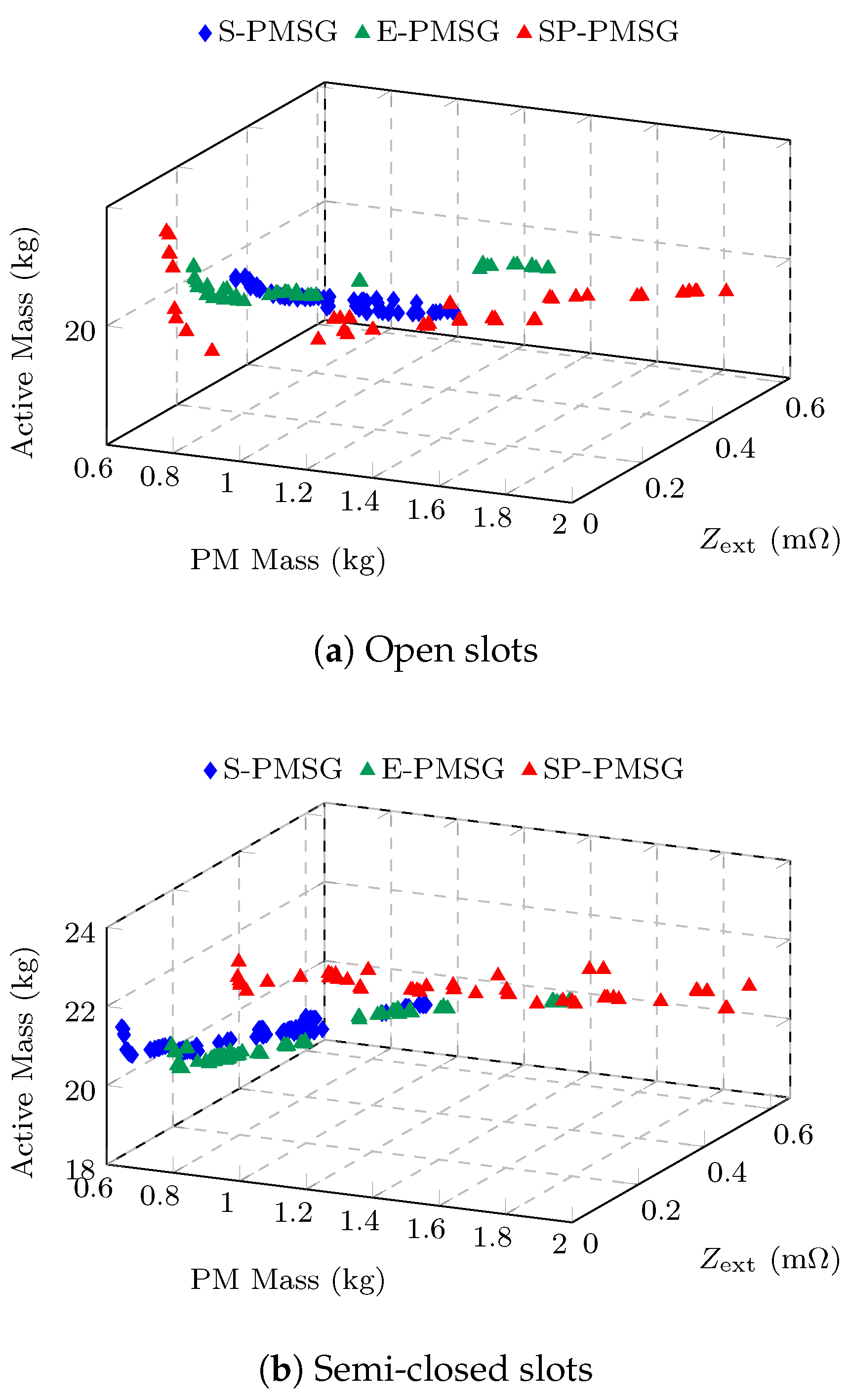
In this section, the design approach and methodology for the different PMSG topologies outlined in
Section 3 is discussed. The PMSG topologies then were the S-PMSG, E-PMSG, and SP-PMSG with open slots and the S-PMSG, E-PMSG, and SP-PMSG with semi-closed rectangular slots.
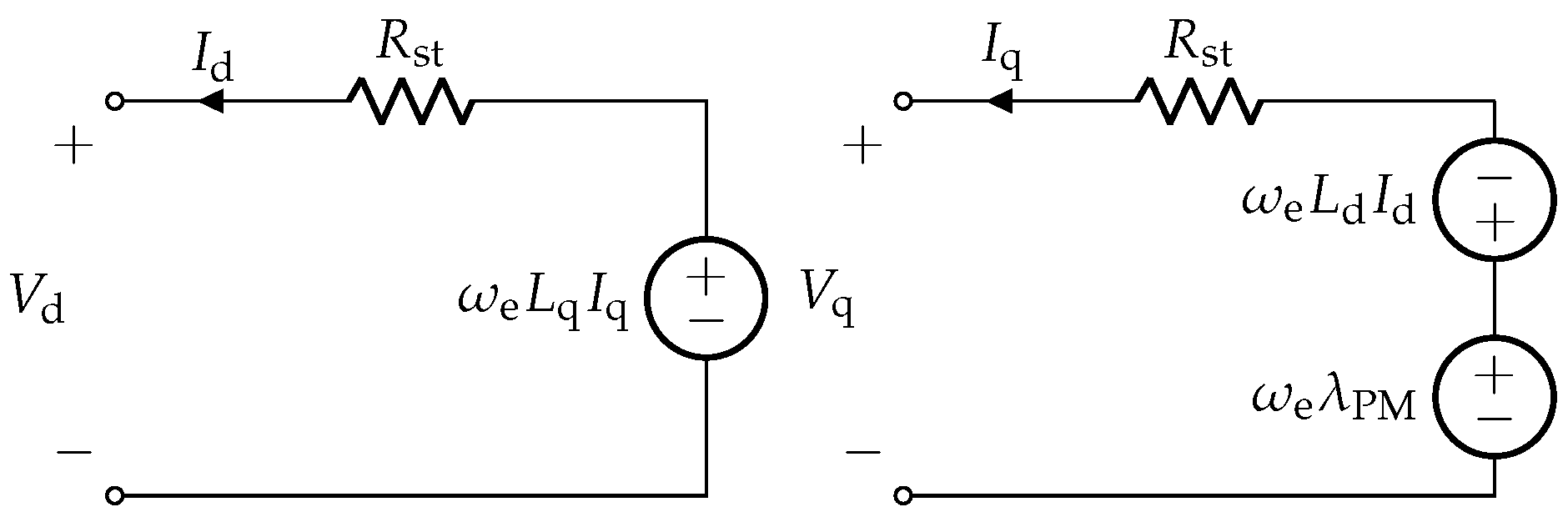
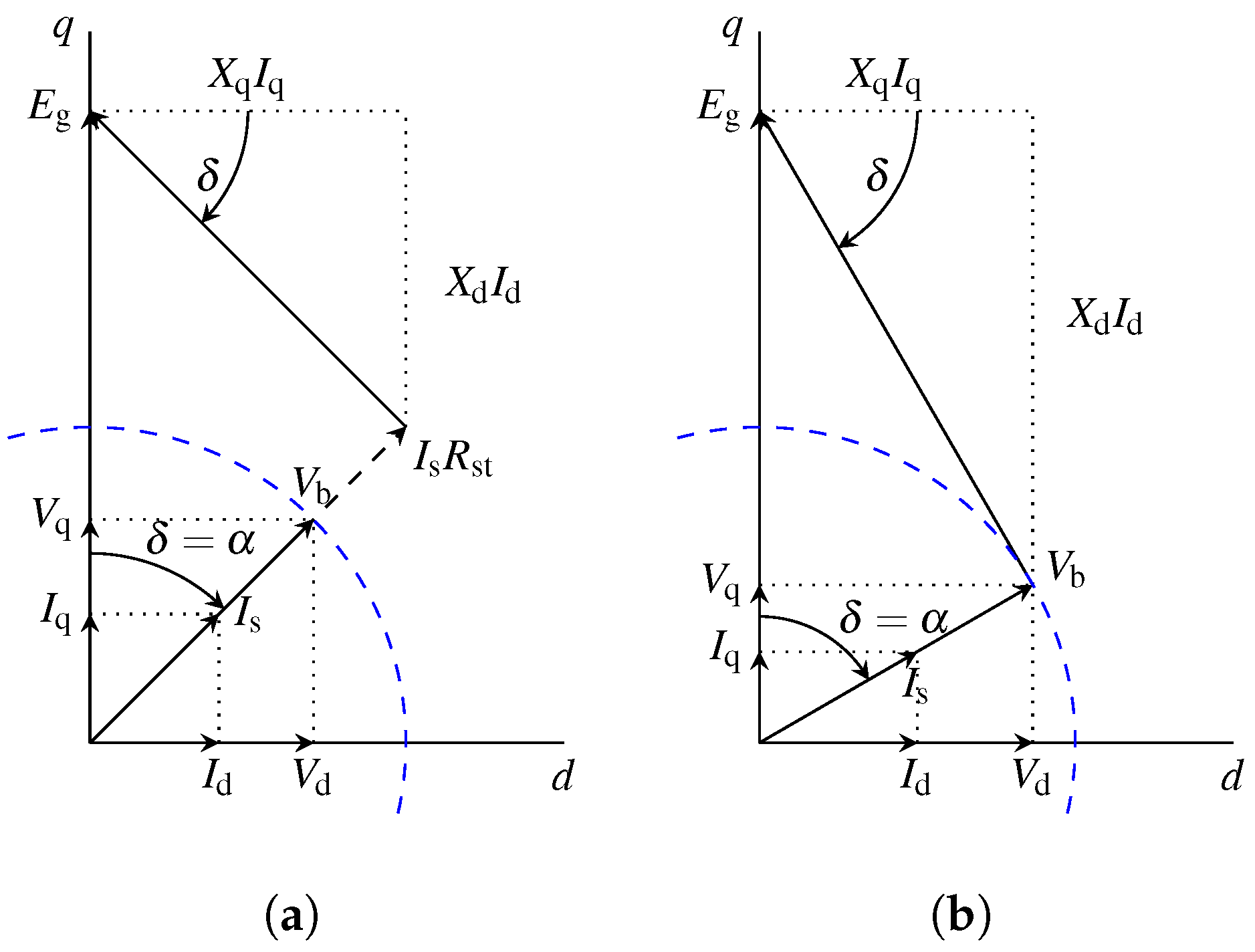
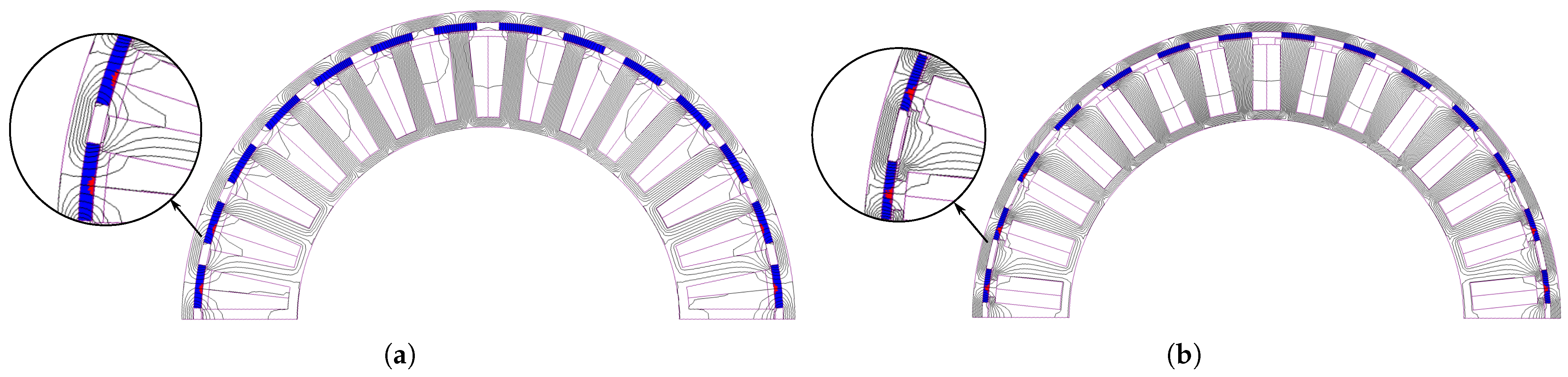
With iron-cored PMSGs, it is difficult to accurately take saturation and armature reaction into account, even more so in this case, with the PMSG operating with a large direct-axis current, as shown in
Figure 1 and
Figure 5. In [
10], an analytical model was used to design the PMSG for a passive wind generator system; however, substantial errors of 17% and 26% were reported for the generated torque and back-EMF. Furthermore, in [
18], it was also shown that using analytical calculations for the synchronous inductance resulted in a significant error in power matching with the wind turbine. The results in [
10,
18] confirmed that it is better to use finite-element analysis (FEA) for PMSGs in passive wind generator systems. Therefore, the performance of the PMSGs in this paper was solved using 2D static FEA. End-effects were taken into account in the 2D FEA for the respective PMSGs, as in [
27,
28].
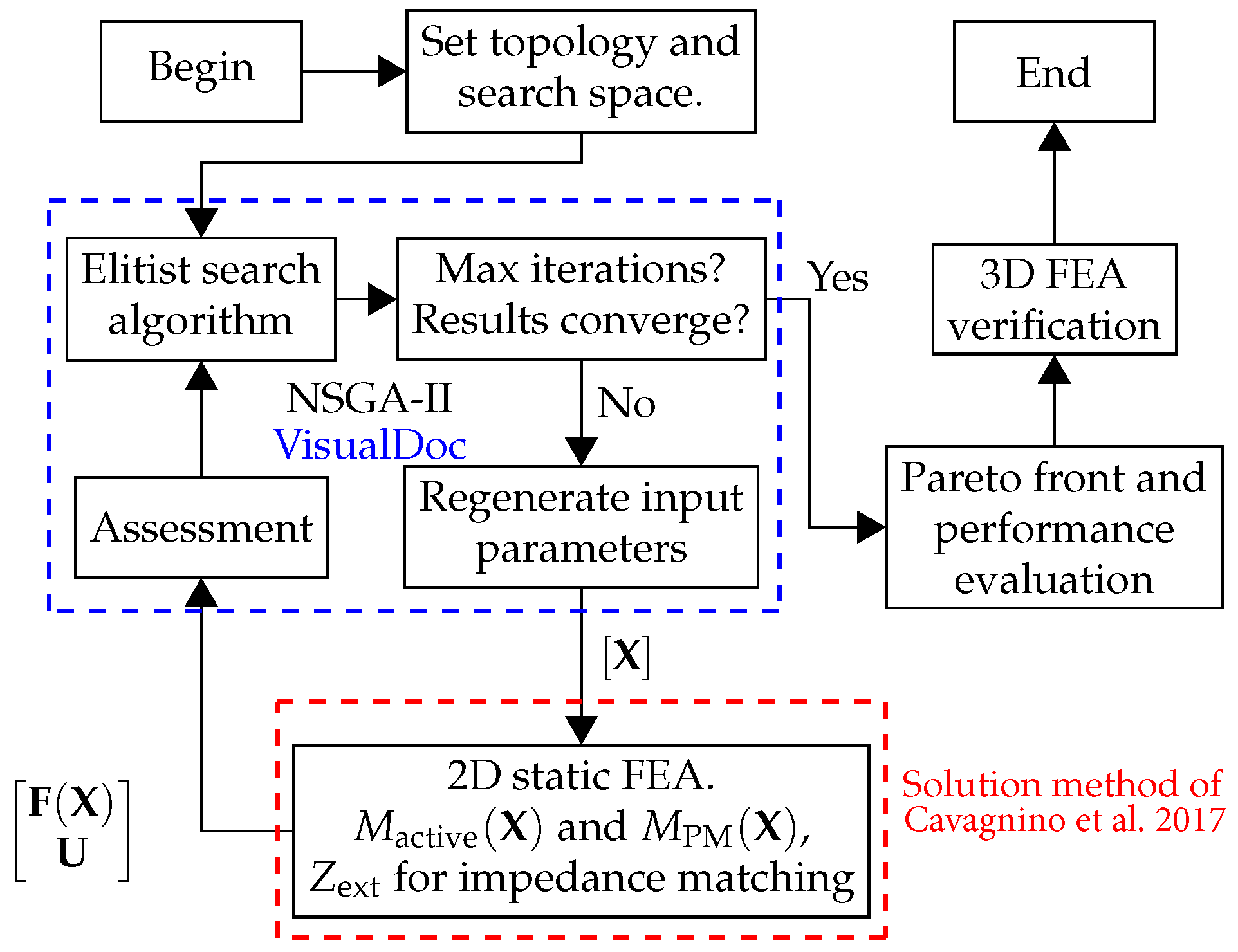
4.1. Multi-Objective Optimisation
The population-based non-gradient genetic algorithm II (NSGA-II) [
29] was used in conjunction with the 2D static FEA solutions to optimise the PMSGs. The design optimisation workflow is shown in
Figure 9.
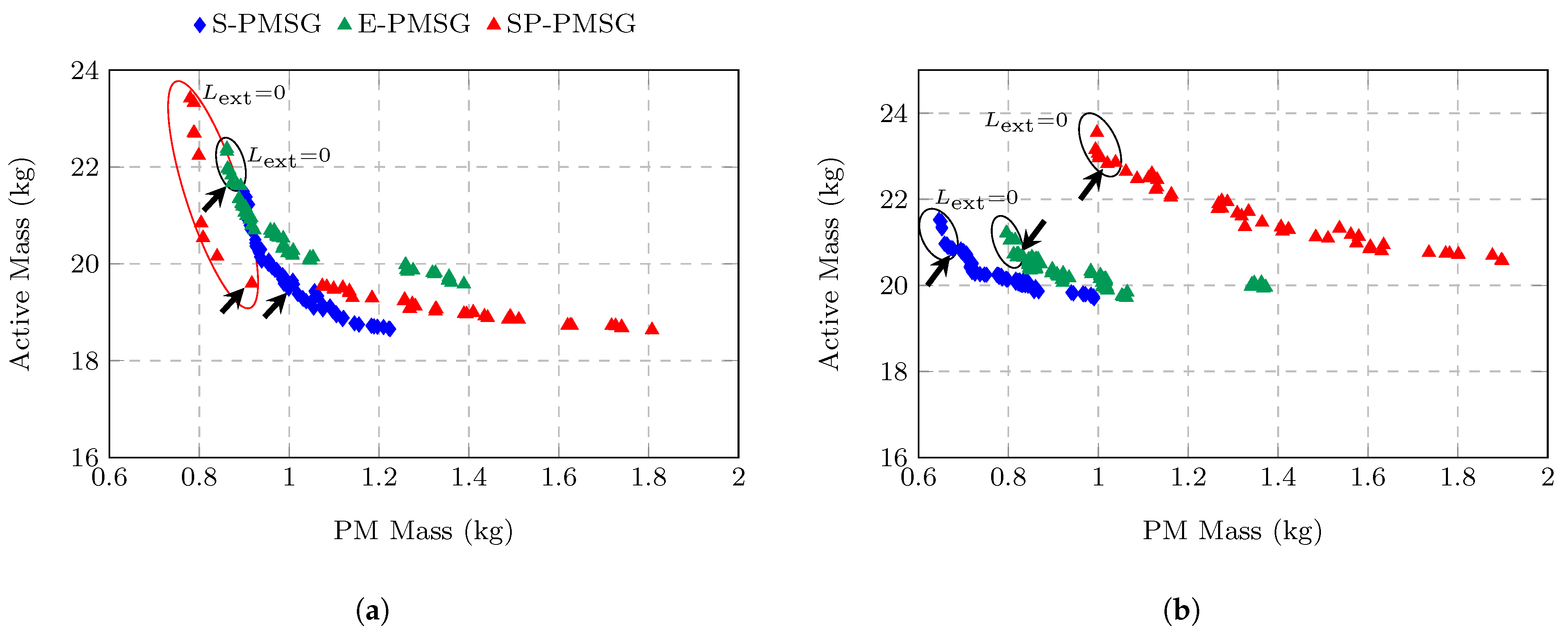
Reducing the PMSG’s cost and minimizing the top-tower mass are important for small-scale wind generators. Therefore, the first two objectives of the multi-objective function given in (
15) were to minimise the PMSG’s active mass,
, and the generator’s PM mass,
. Minimizing
has the dual purpose of reducing the generator’s cost and the top-tower mass. The generator’s PM mass,
, is the most expensive material and, given its volatile cost, needs to be minimised as a separate objective.
The PMSG’s active mass in (
15) is calculated as:
where
is the collective mass of the stator and rotor iron laminations and
is the total copper winding mass, which includes the end-winding mass.
The other objective in (
15) is to minimise the impedance error,
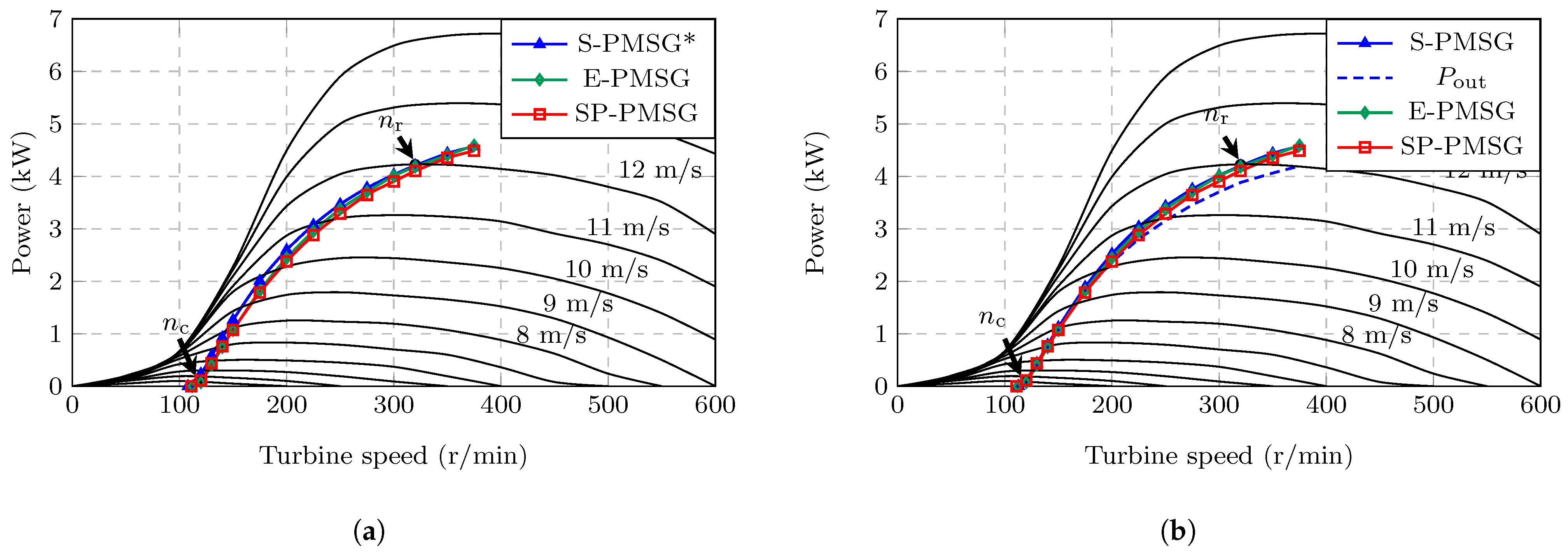
. This is the required difference in generator impedance, if not zero, to match the generator’s power with the turbine at the rated operating point, as shown in
Figure 10a. The impedance error is visually illustrated in
Figure 10b as a physical external impedance component (
), which is added, if necessary, to the passive generator system between the generator and the diode bridge rectifier. As shown in
Figure 9, the impedance error is calculated with the solution method for external impedance matching given in [
18]. The impedance error is then given as feedback to the optimisation algorithm. In this way, the optimisation algorithm finds non-dominated PMSG solutions where
, i.e., where the PMSGs are designed for the correct synchronous impedance
that matches
naturally the maximum wind turbine power, or alternatively, where the PMSGs match the wind turbine power with the correct external impedance added to the system.
4.2. Design Constraints and Input Parameters
The design constraints for the PMSGs at the rated operating point are given by:
In (
17),
is the rated power,
is the generator efficiency, and
is the maximum allowed RMS current density. The constraint on
was imposed to ensure that the desired power matching was achieved between the PMSG and the wind turbine. The constraint on
is a thermal constraint and is a typical value for small-scale machines of this power rating [
25].
In (
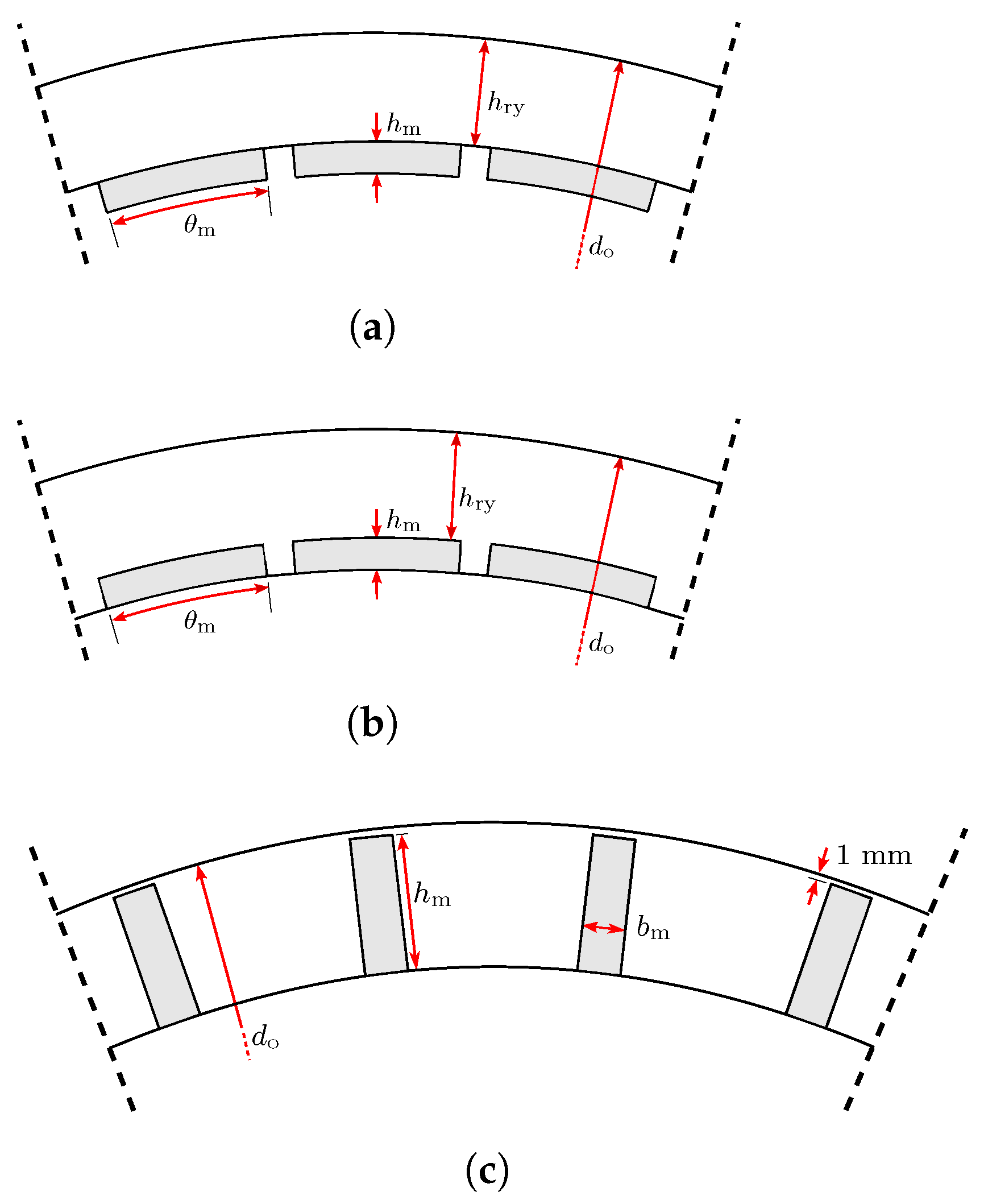
15),
X is the input vector generated by NSGA-II containing the relevant dimensions for each topology, as defined in
Figure 6 and
Figure 7. A parameterised geometry was used to maintain a realistic optimisation search space, and four geometric boundaries were imposed: the outer diameter was limited to that of the wind turbine’s nacelle
mm; the relevant rotor and stator yoke heights had to be
,
mm to maintain structural integrity; as a precaution for demagnetisation and for manufacturing ease (brittle PMs) of the S-PMSG, the minimum allowed PM height was
mm. For all the PMSG designs, the mechanical air gap was kept constant at
mm. For the SP-PMSGs, the rotor yoke support, as shown in
Figure 7c, was kept constant at 1 mm. For the PM material, NdFeB N48 was used.
6. Prototype and Experimental Validation
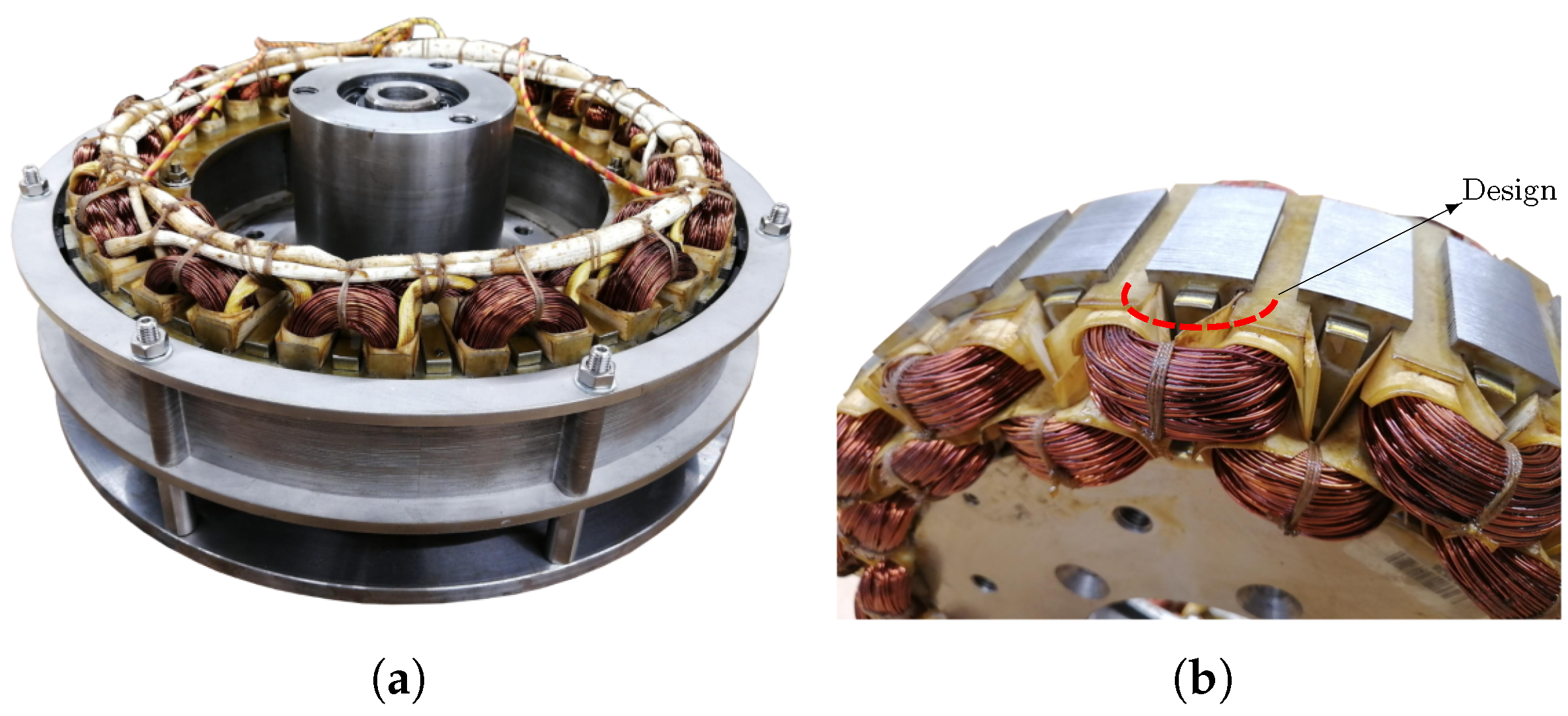
For the experimental validation, a prototype of the S-PMSG with semi-closed slots in
Table 5 was built. The manufactured prototype is shown in
Figure 16a. It is shown in
Figure 16b that the axial overhang of the end-winding length,
, was larger than what was designed. In the 2D FEA, this length was taken as
mm; however, the actual measured value was
mm (This is an error by the winder. It is possible to wind the machine for the designed overhang length.). For the experimental validation, this length was taken into account in the FEA solutions.
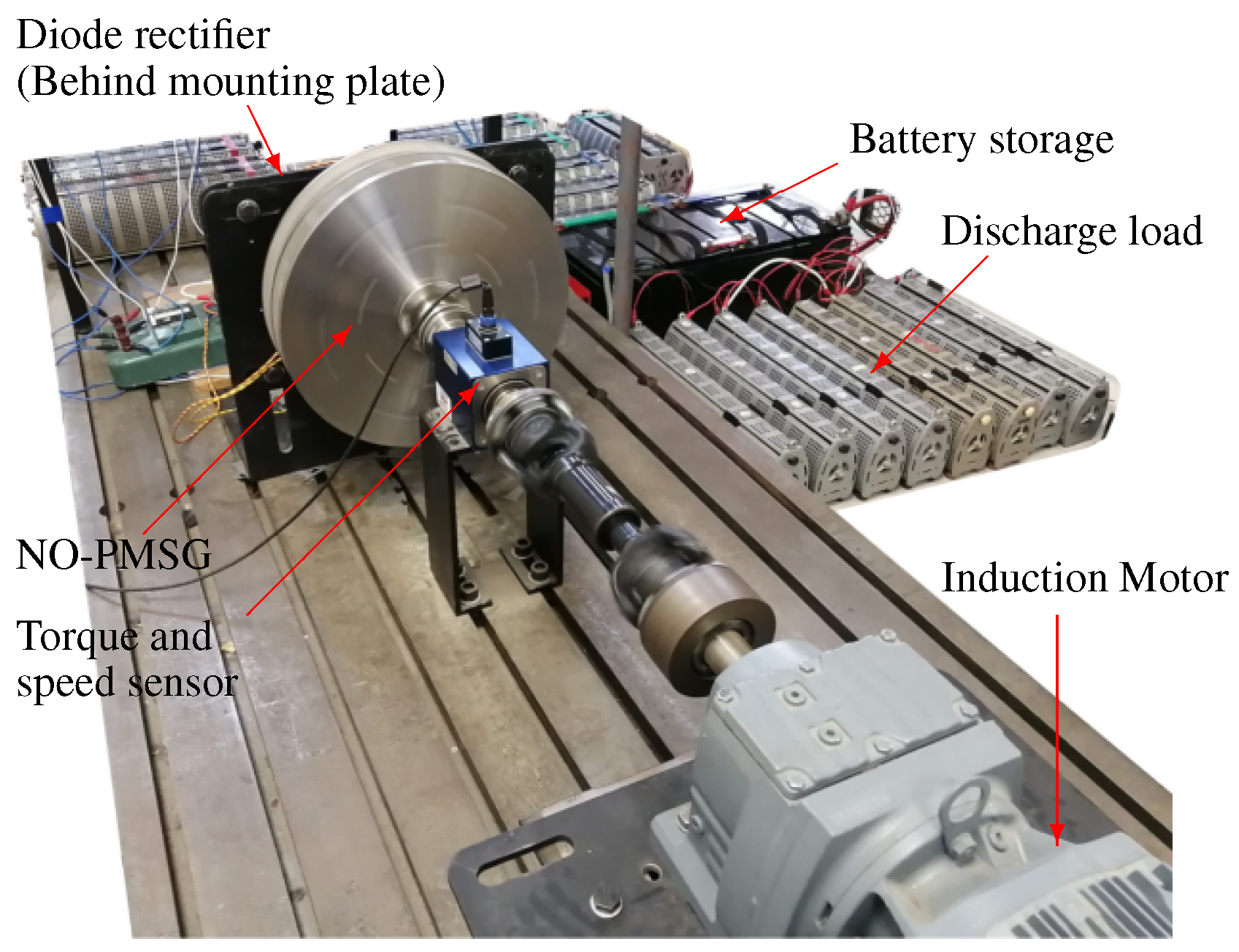
The experimental setup on the test bench is shown in
Figure 17. In
Figure 17, the S-PMSG prototype was mechanically connected to a geared induction motor drive that emulated the wind turbine. The torque sensor in
Figure 17 was used to measure the input power. The S-PMSG prototype was electrically connected to the battery bank via a diode bridge rectifier. The 48 V battery bank energy storage and discharge load are also shown in
Figure 17.
6.1. Power Matching Measurements
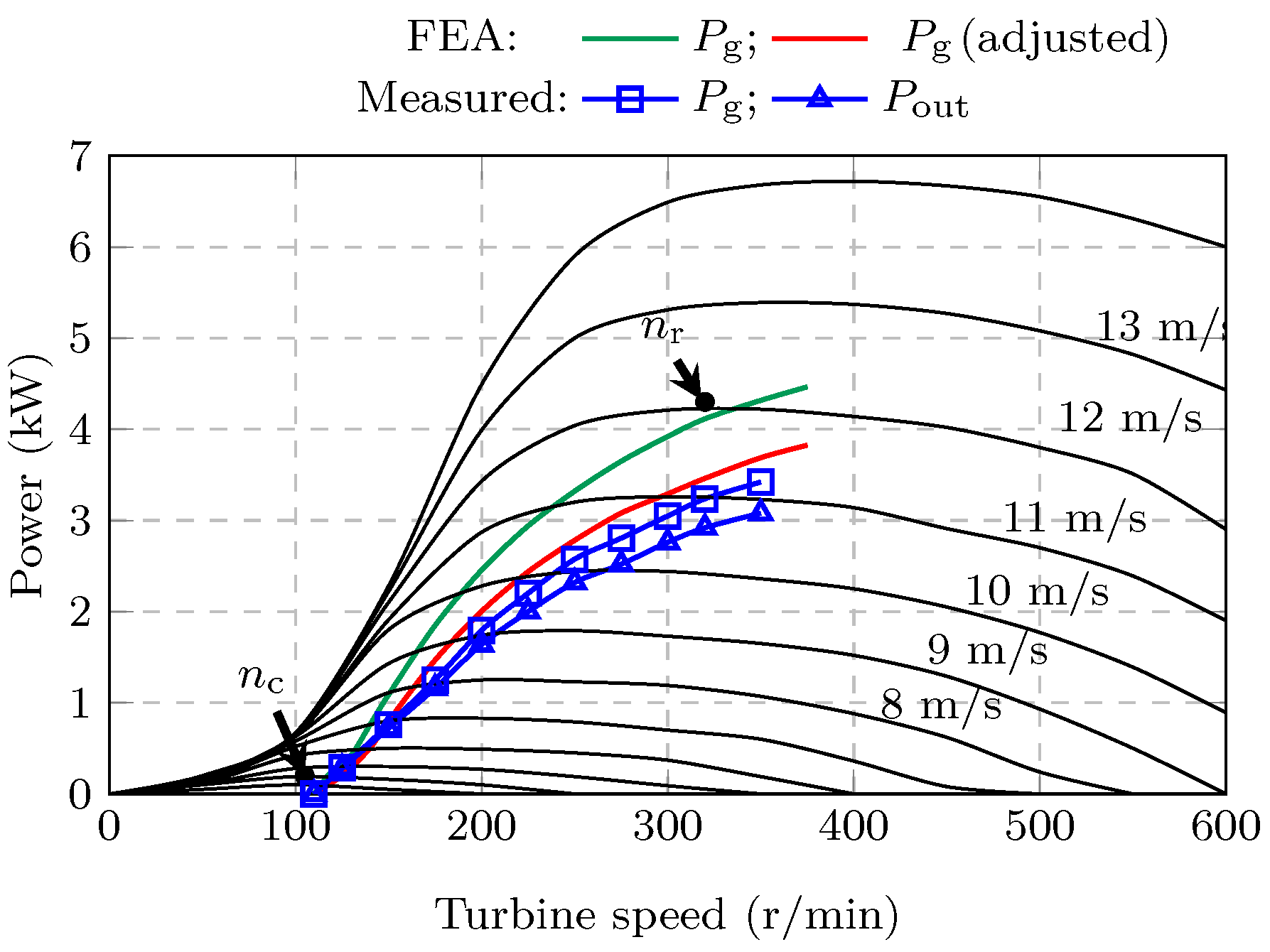
The measured results for the S-PMSG prototype’s generated power,
, and output power,
, are shown in
Figure 18. It is shown that the
power measurements were much lower than what was designed (green FEA curve). The following explanation accounts for the measured results in
Figure 18.
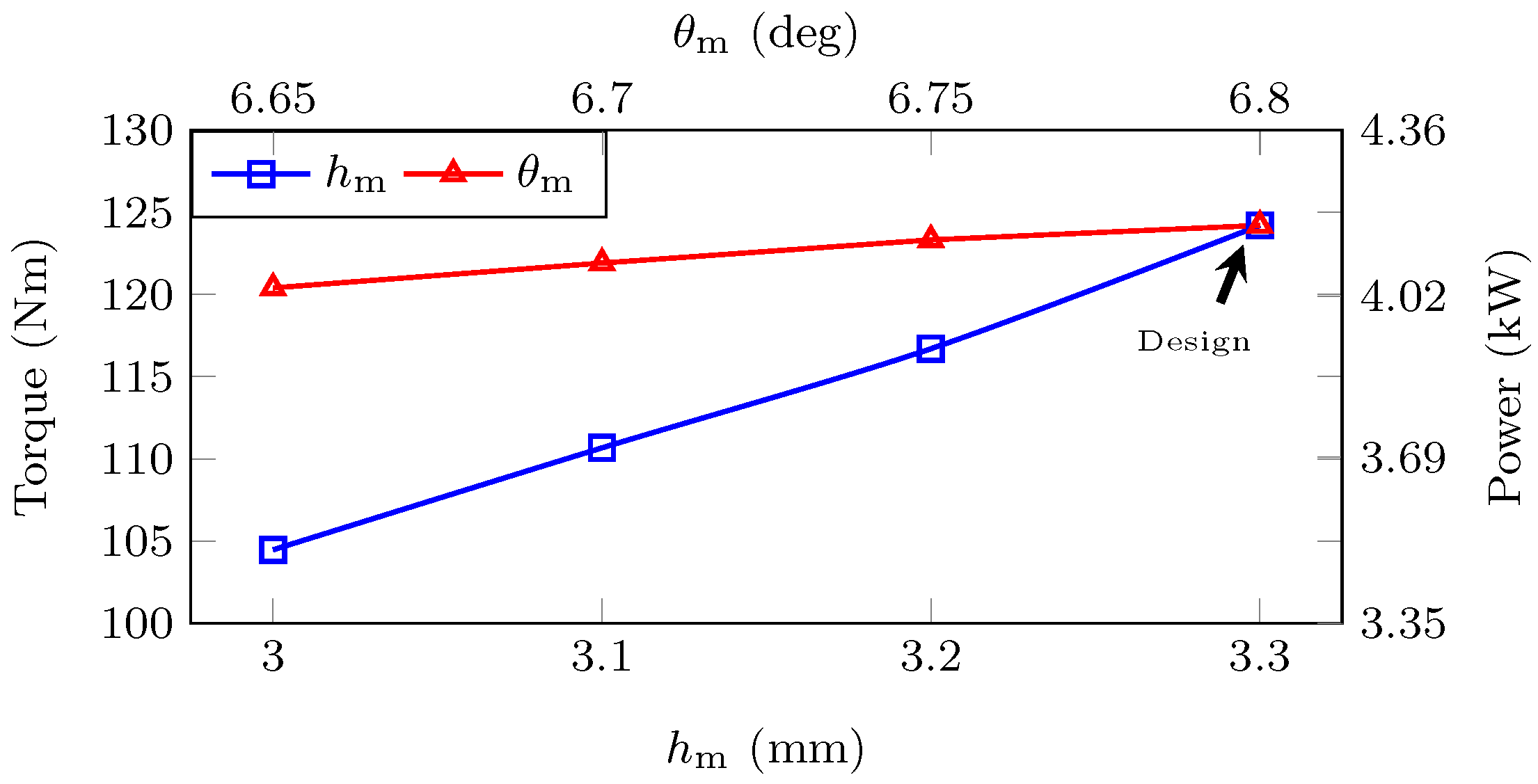
The manufacturer of the prototype’s PMs could only guarantee certain dimensional tolerances on the PMs. Initially, these tolerances were considered insignificant. However,
Figure 19 shows that the S-PMSG’s performance was very sensitive to these manufacturing tolerances, i.e., the magnet height
and the magnet pitch angle
. It is shown in
Figure 19 that the PMSG’s generated torque was particularly sensitive to
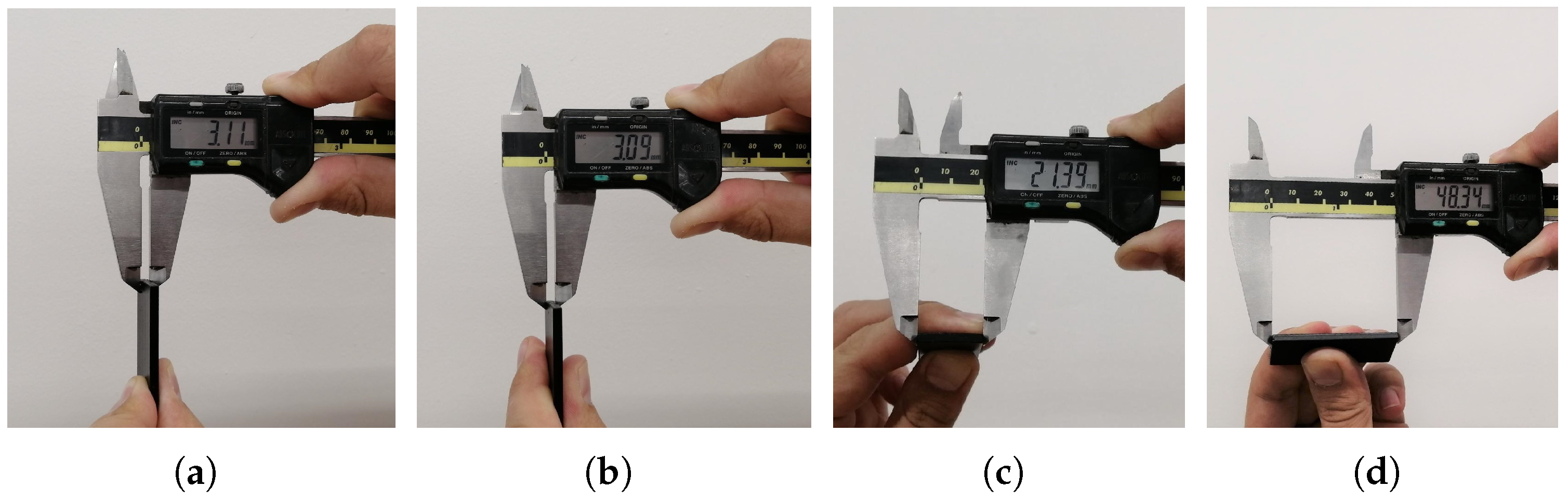
, seeing as a smaller magnet height also results in a larger air gap. Attempts to measure the height and width of the PMs with a digital calliper are shown in
Figure A2 in
Appendix B. In
Figure A2a,b, it is shown that the average PM height was
mm, instead of the
mm for which the PMs were designed. Shown also in
Figure A2c,d is that the magnet pitch angle and PM length were also slightly below the designed values.
It is shown in
Figure 18 that, if the PMs’ dimensions were adjusted in the FEA accordingly, a better correlation between the measured power matching and the FEA (red curve) predicted power matching would be obtained. The measured and FEA results are also summarised in
Table 8. The adjusted 2D and 3D FEA results are both included in
Table 8. The deviation between the measured and 2D FEA predicted
in
Table 8 at
r/min was
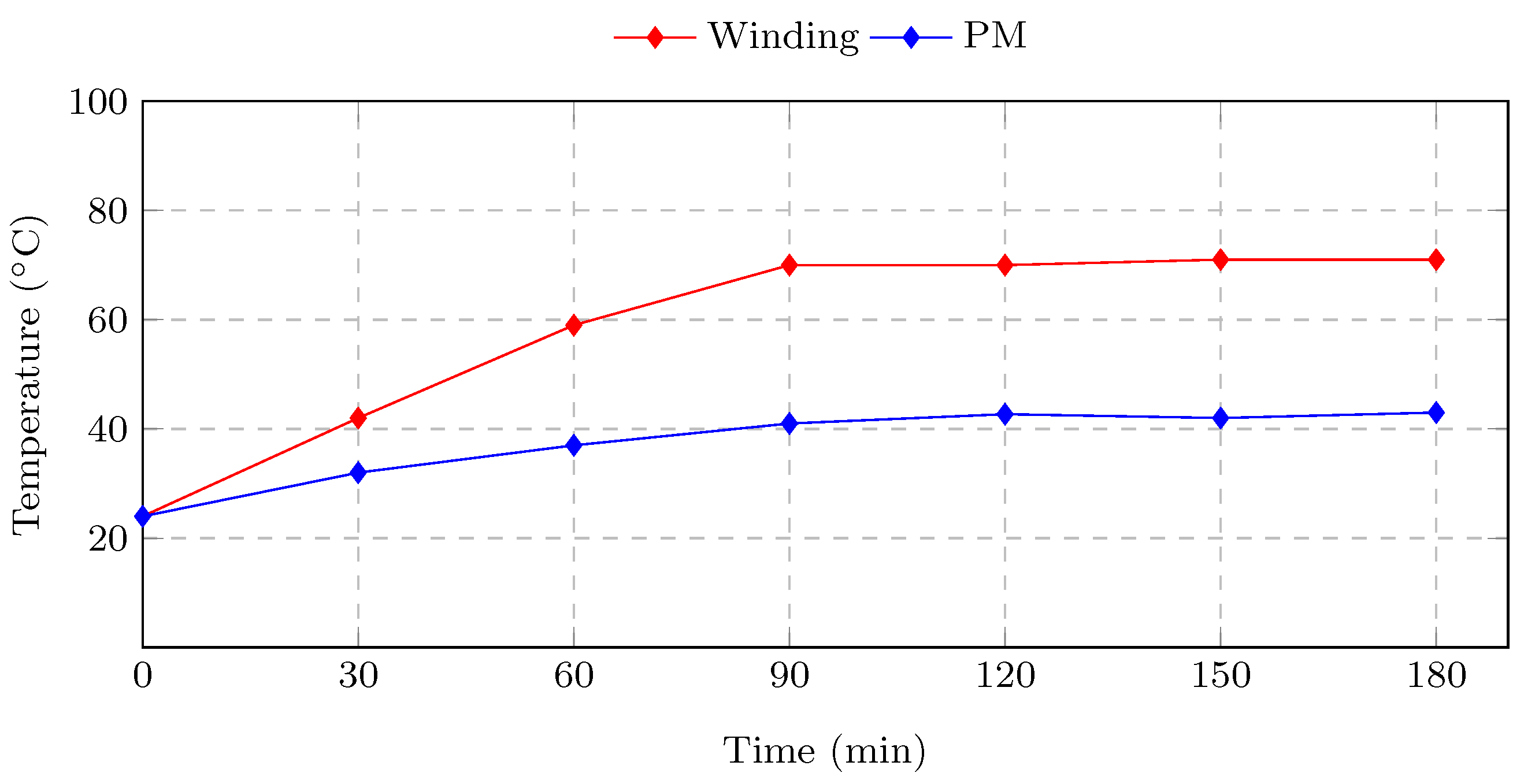
. All measurements were taken at steady-state temperature. The thermal measurements are given in
Figure A3 in
Appendix B.
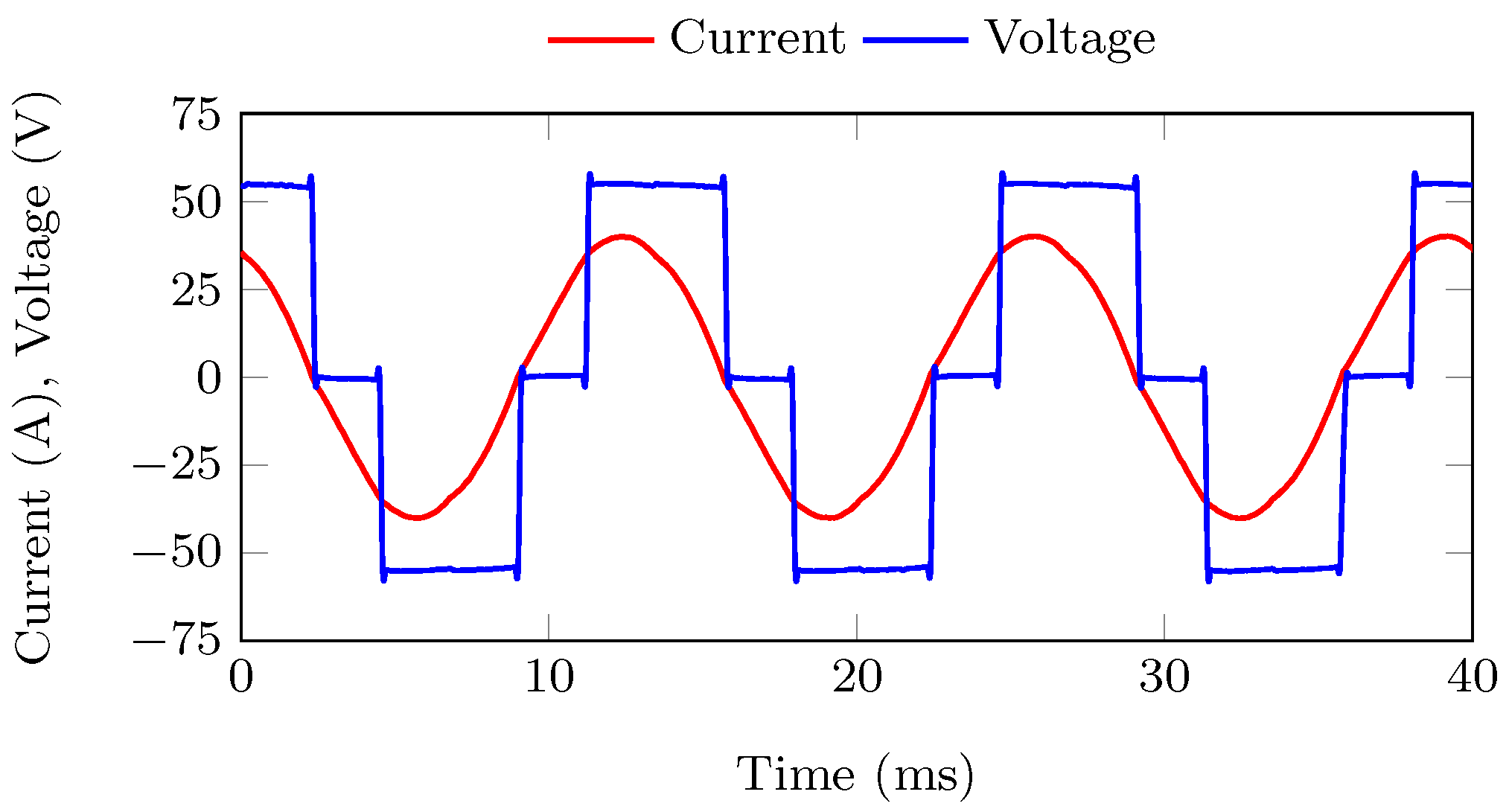
The measured current and voltage waveforms are shown in
Figure 20. The current waveform in
Figure 20 are sinusoidal and also correctly 30 deg out of phase with the fundamental line voltage, i.e., the PMSG was operating at a unity displacement power factor.
6.2. No-Load and Short-Circuit Measurements
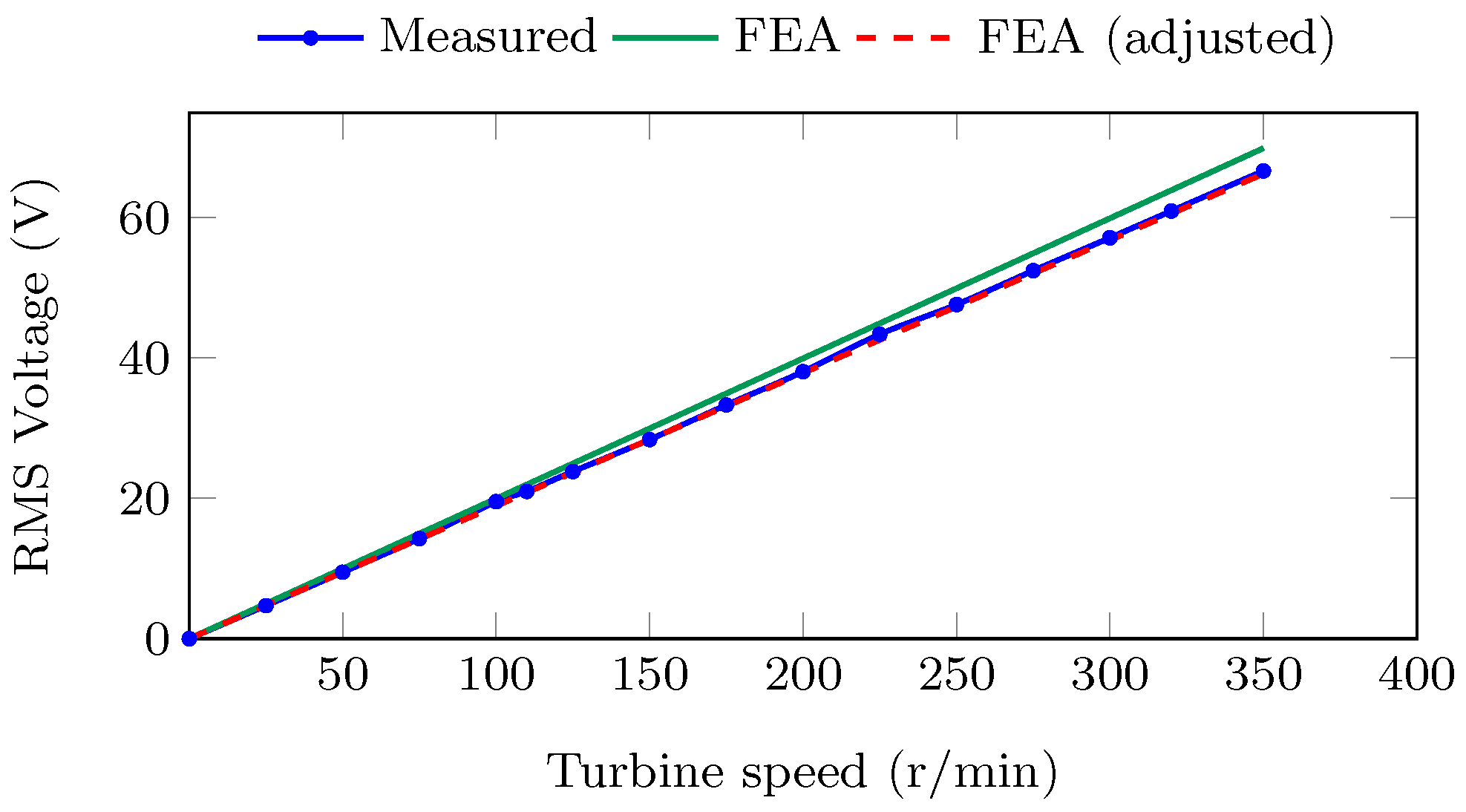
The no-load open-circuit voltage measurements versus FEA-calculated voltage are shown in
Figure 21. The values for the measured no-load open circuit voltage at
r/min are also summarised in
Table 8. The measured versus FEA results in
Figure 21 showed a good correlation. This verified the results in the previous subsection and the effect of the manufacturing tolerances of the PMs.
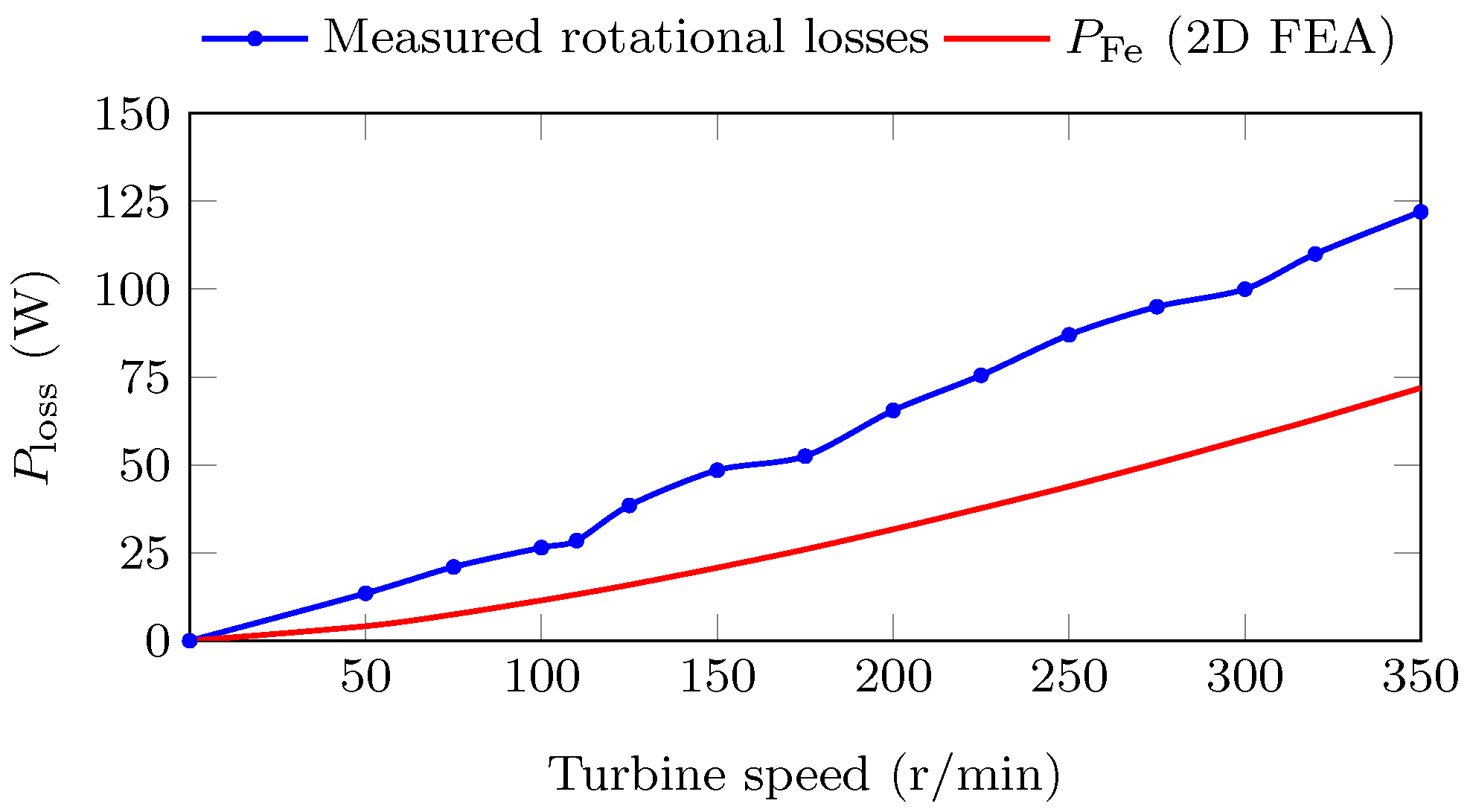
The measured no-load rotational losses are also plotted in
Figure 22 and are compared to the no-load 2D FEA-predicted iron losses
. The difference can be attributed to wind and friction losses that were not accounted for in the design process. These additional wind and friction losses then also accounted for a portion of the
difference between the measured and FEA-predicted
in
Figure 18 and
Table 8, as well as the difference in efficiency
. The measured rotational losses at
and rated load were 118 W. As shown in the no-load measurements in
Figure 18, wind and friction losses accounted for approximately half of this. the latter indicates that the iron losses
at rated load were slightly higher than what was predicted in the FEA solutions and would account for the lower efficiency measurement in
Table 8.
The internal synchronous inductance was measured by means of a number of short-circuit tests to obtain an average value. It is shown in
Table 8 that the average measured
was very close to the FEA calculated values.
7. Conclusions
In this paper, different topology PMSGs were considered in the design process of wind generators for small-scale uncontrolled passive wind generator systems. This was performed to investigate whether the resulting higher internal impedance of the generator, from either using an interior PM rotor or a different stator slot structure, was sufficient to achieve the desired power matching with the wind turbine. The respective PMSGs were designed using a multi-objective design optimisation approach. The following main conclusions were drawn from the investigation:
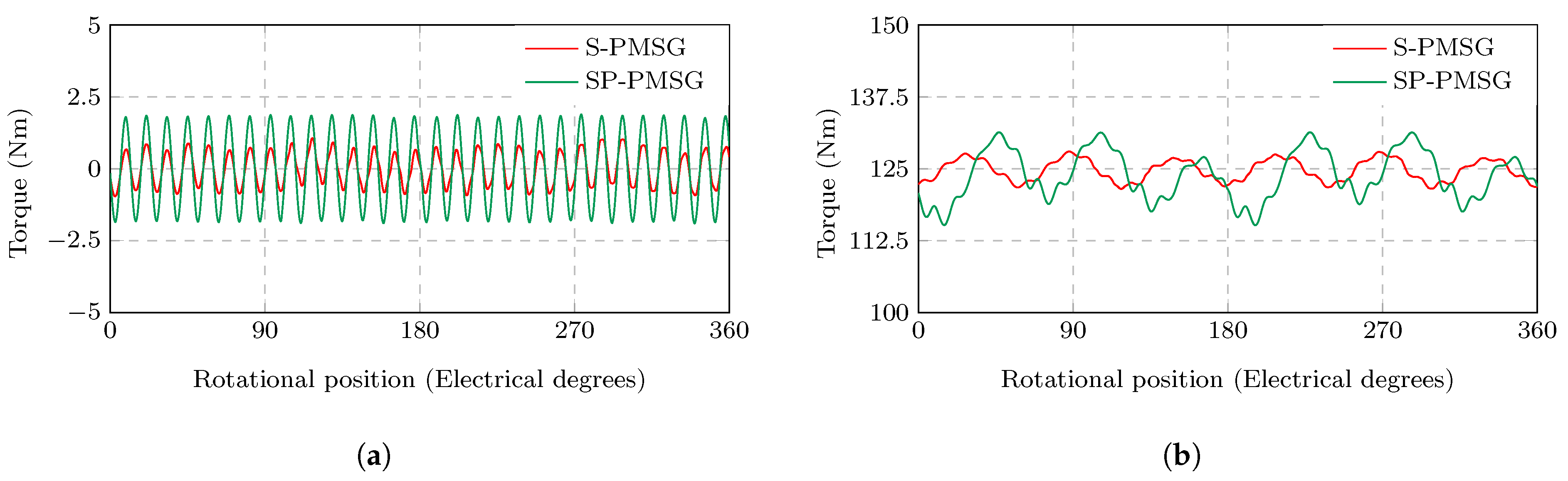
For PMSGs with surface-mounted PMs on the rotor, it was shown that the required impedance for a natural impedance matching with the wind turbine could be attained by changing the stator structure. Using semi-closed slots, as opposed to open slots, was shown to be a better design choice. Using semi-closed slots reduced the risk of PM demagnetisation and did not compromise the generator’s torque quality. The S-PMSG with semi-closed slots was also the most cost-effective generator and, therefore, ultimately, the optimal generator choice.
Altering the rotor structure and the orientation of the PMs in the rotor to increase the magnetic saliency was shown to be another viable method to achieve the desired impedance matching. However, in this case, it was clear that an open-slot stator structure should be used. The E-PMSG and SP-PMSG topologies also had poor torque quality compared to the S-PMSG generators. Therefore, it is not recommended that these topologies be used for small-scale wind generators. Careful attention should also be paid to the leakage and end-effects of SP-PMSGs, as these can have a significant impact on the generator’s performance if ignored.
The results presented in this paper were validated by a good comparison between the calculated and measured results of a prototype S-PMSG with semi-closed stator slots. However, it was shown that, when the PM material was minimised to the extreme in the design optimisation, the manufacturing tolerances on the PMs could have a significant effect on the power matching results. This was a very important outcome, showing that manufacturing tolerances should be accounted for more rigorously in the design process and manufacturing, especially in relation to PM height.





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}























