The core was radially laminated, and a stator and rotor fill factor of 0.8 was chosen, whereby filler laminations were considered 1:1 in the rotor. The current density was set at 5 A/mm2 for air-cooling requirements. Achieving such a high current density was not feasible for the rotary transformer due to the internal winding on the rotor being difficult to cool. The achieved current density was 1.6 A/mm2 on the rotor to achieve the efficiency target of the design, resulting in a lower-power-density rotary transformer.
4.2. Lamination Evaluation
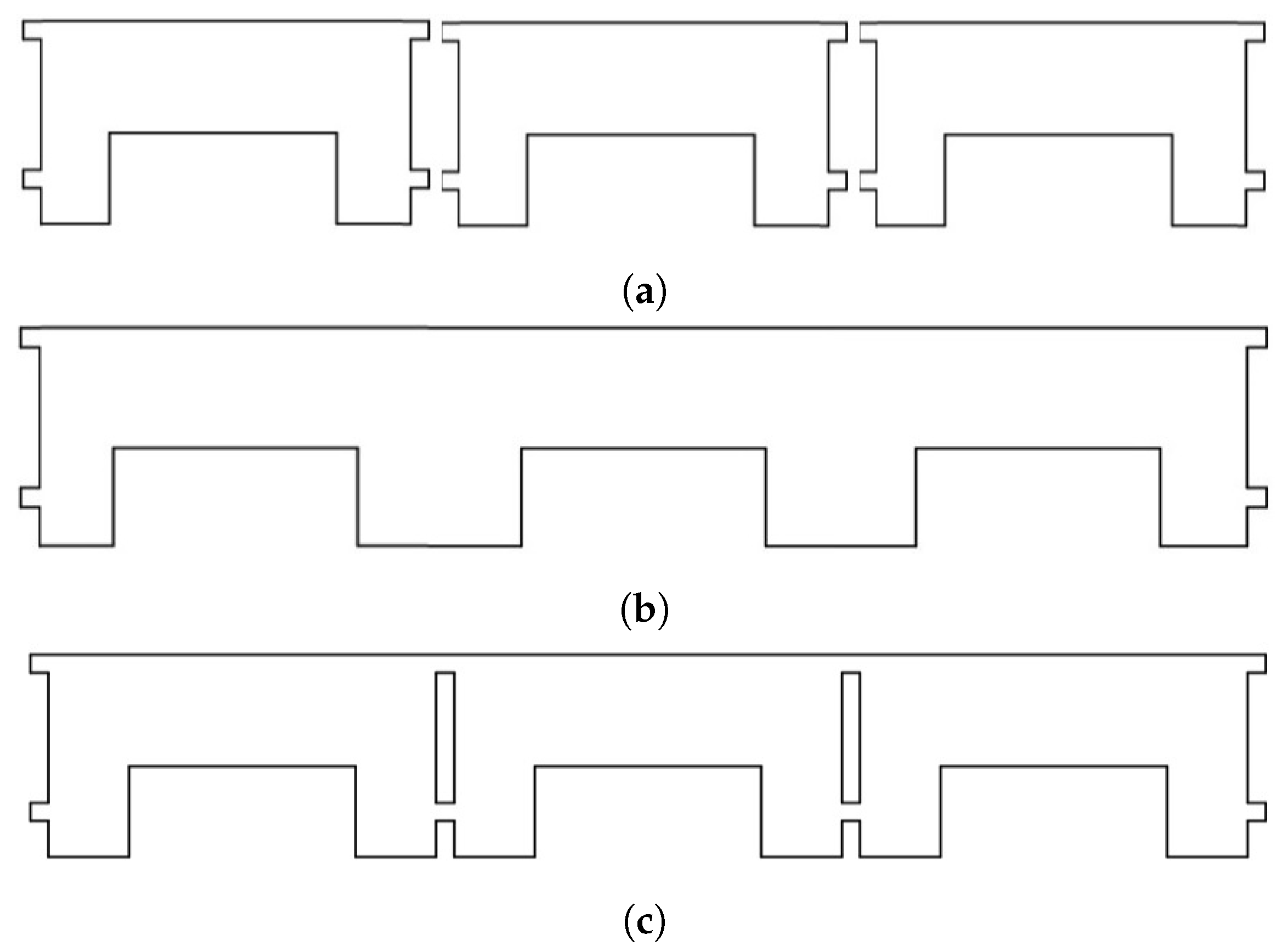
Finite element analysis (FEA) results of the three lamination configurations, as presented in the previous section, for the three-phase rotary transformer are presented in this section. ANSYS Maxwell 2/3D was used and the analysis was performed in both 2D and 3D FEA for comparison with a discretization of 0.0001 s with a backwards Euler solver accuracy of 1 × 10
. The presented configurations were all connected in Y–Y and the analysis was performed under open circuit conditions, whereby the rotor side was excited at the rated operating voltage of 230 V per phase. All three lamination configurations had filler laminations on the rotor.
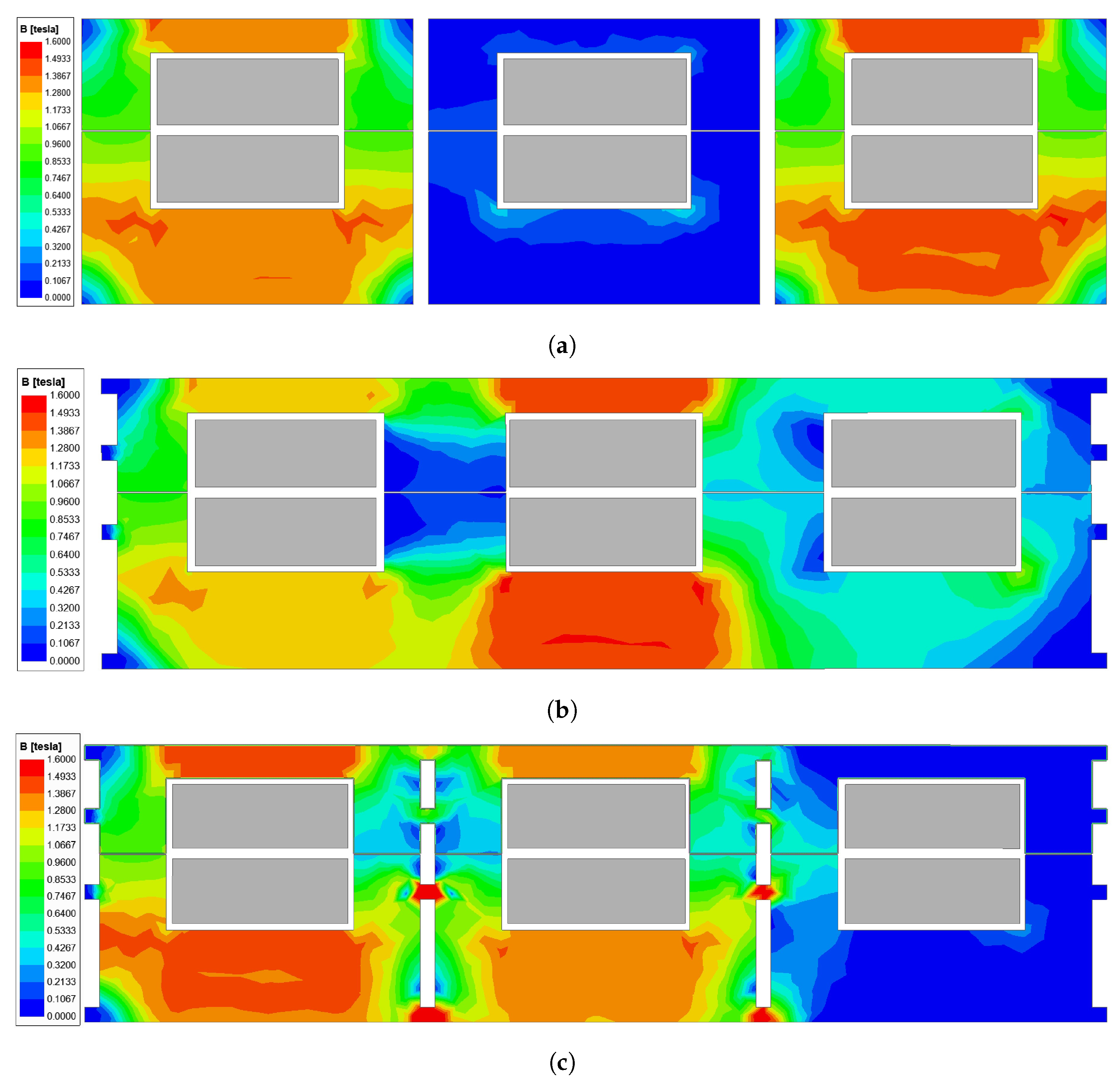
Figure 7 shows the peak flux density at 325 V.
A key factor in the dynamic performance of the rotary transformer is the leakage inductance. The leakage inductance has the largest impact on the voltage regulation. An increase in the winding width and a decrease in the distance between the coils are required to improve coupling and thus reduce the leakage inductance. Special care has to be taken when simulating for leakage inductance, as most 2D FEA software cannot compute it accurately due to the rotary transformer’s laminations and the unconventionality of the air gap. The inductance is calculated as a full inductance matrix and converted to magnetization and leakage inductance per phase. To evaluate the accuracy of the FEA solution, a 2D simulation was run in the axisymmetric mode with a decreased lamination density to equal the amount of magnetic material present in the 3D model.
A 3D quarter model simulation with individual lamination sheets was used to verify the results and compare them against analytical calculations with error correction as presented in this paper. The results of these simulations on the rotary transformer model are shown in
Table 3. The 2D simulations showed an increased magnetization inductance, which resulted in lower open circuit currents for all three proposed topologies. The 3D FEA and analytical calculations had similar magnetization inductance values for all three rotary transformers, at around 14% lower than the 2D FEA.
The leakage inductance was computed as much lower in the 2D FEA simulations for all cases, resulting in an assumption that the rotary transformer is capable of a better dynamic voltage regulation than it can achieve. The 3D FEA provided a higher leakage inductance in all three cases and was assumed to be accurate if there were no winding errors and if the coils were placed exactly in the same positions as the simulation. The analytical calculation was much more conservative, taking into account the expected tolerances on the winding size, fill factor and placement. The analytical solution was chosen as it represents a worst-case scenario and is more practicable on a prototype when the correction factors discussed in
Section 2.2.1 are used.
The type I configuration had no leakage flux between phases, as seen in
Figure 7a. The rotary transformer operated below the saturation point of the core material. It can be observed from the figure that the core material on the stator was not as effectively used as on the rotor. The phase currents were well balanced, as shown in
Figure 8.
The results of the rotary transformer type I are shown in
Figure 7b. This configuration resulted in a high power density of 445 kW/m
3 at the cost of coupling stability, and it was the default configuration for conventional transformers. The rotary transformer operated below the saturation point of the core material with a mutual inductance between phases of 0.4 PU at open circuit. The center phase had a reduced magnetization current, as shown in
Figure 8.
For the type III rotary transformer, the flux density plot is shown in
Figure 7c. Saturation was observed on the ribs joining the single-phase laminations. The ribs saturated at 108 V per phase, which causes additional localized losses. The mutual flux between the phases amounted to a reduced magnetizing current requirement in phase B, similar to conventional shell-type transformers. The open circuit magnetization currents for the 3D FEA can be seen in
Figure 8.
Comparing the proposed topologies, it is clear that the type I rotary transformers had the best operating characteristics with respect to what their inductances indicate. This correlates with previous research conducted by [
8,
9,
19,
31] which all utilized single-phase rotary transformers. The primary disadvantages of this solution are the increased cost and manufacturing requirements, the reduced power density of 390 kW/m
3 and the increased transformer size. The type II topology had the highest power density and lowest cost, but the worst performance at low loads and an increased leakage inductance. The power density requirements can, however, still make this a viable topology as the voltage regulation was about 8% worse during phase B than the single-phase rotary transformer configuration at full load. The average voltage regulation values for the rotary transformers are shown in
Table 4.
The ribbed topology offers reduced cost and complexity, while still maintaining a partial separation of flux from the phases by the use of small ribs between the phases. The topology has a reduced power density compared to the type II topology at 405 kW/m3, but allows for the ability to cool the inner phase while still retaining a similar leakage as the shared limb.
In this paper, the type III configuration was chosen due to the uncertainty of cooling the inner phase without significant measures being taken, such as cooling the shaft internally. It allows for forced air cooling to be used, as the spaces between the phases are large enough. The topology can also be designed as a single phase, as it has comparable characteristics and dimensions to the single-phase design.
At full load, all three topologies operated at below the materials saturation point of 1.5 T. The type I rotary transformer configuration had the lowest core losses of 107 W at full load, while the type II and III configurations had full-load core losses of 112 W and 109 W, respectively. All three topologies had the same winding configuration and therefore similar conduction losses.
Although the type I configuration performed better, the increased cost and manufacturing requirements as well as the low power density makes the type III configuration a more suitable design, as it does not compromise excessively on any of the important characteristics of the rotary transformer.
4.3. Experimental Evaluation
To evaluate the accuracy of the analytical and FEA models, a prototype was manufactured. The frame, shaft and end plates were all made from stainless steel 316, while the laminations were M400-50A non-grain-oriented steel. The winding material was enameled copper wire connected in a Y–Y configuration.
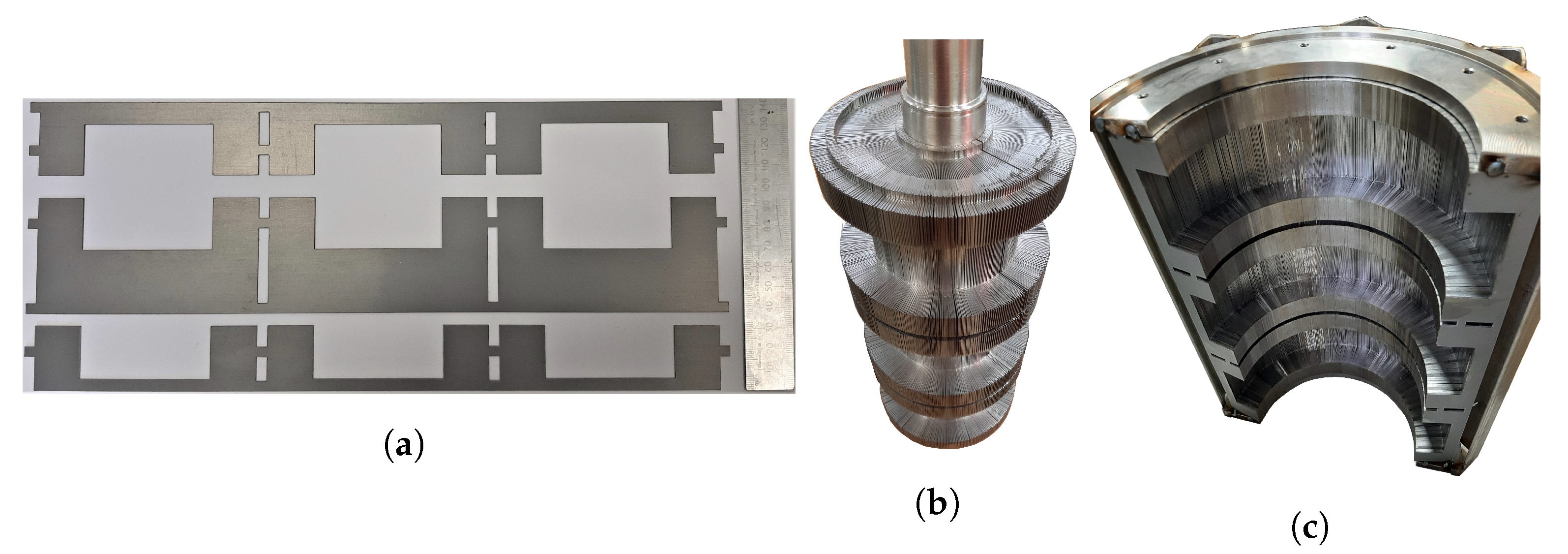
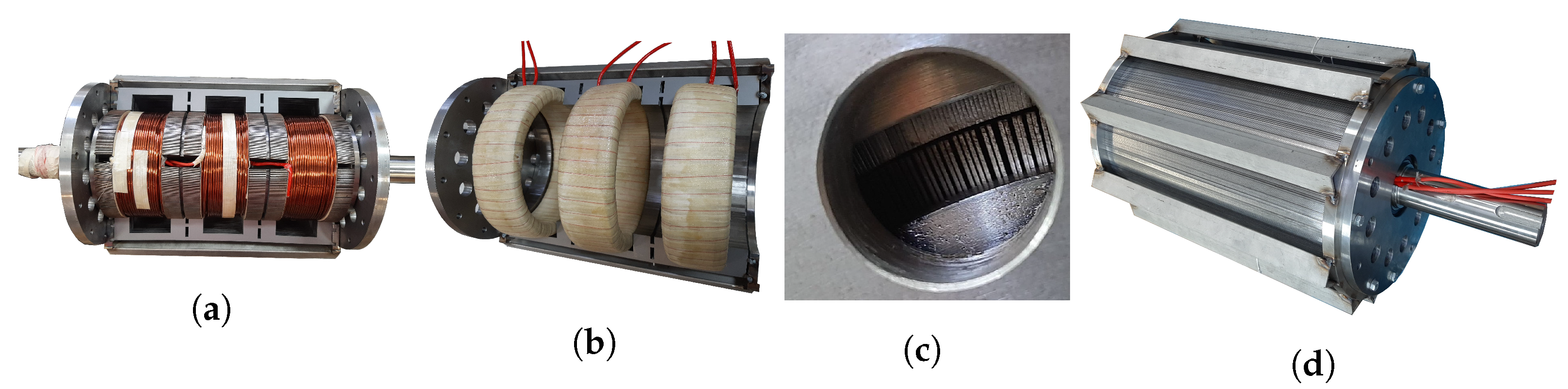
The manufactured rotary transformer laminations and filler laminations are shown in
Figure 9a, and the stacked rotor and stator laminations can be seen in
Figure 9b. The wire terminals were internally connected in Y during the assembly process in order to reduce the slot size.
Figure 10a shows the completed rotor during a test fit in the stator. The achieved rotor winding fill factor was 0.63 with a stacking fill factor of 0.7.
The stator of the rotary transformer had to be made in two halves to accommodate the coils in the inside. The stator coils were wound and then baked in resin to keep them in shape. The achieved fill factor for the stator coils was 0.58, with a stacking fill factor of 0.75. The coils can be seen in one half of the stator in
Figure 10b. No filler laminations were added in the stator. The stator lamination can be seen in the completed half of the stator in
Figure 9c.
The different assembly stages are shown in
Figure 10. The achieved air gap of the prototype had a range between 0.5 and 0.7 mm, with 0.6 mm being the average. This mostly affects magnetizing inductance.
4.3.1. Equivalent Circuit Parameter Measurements
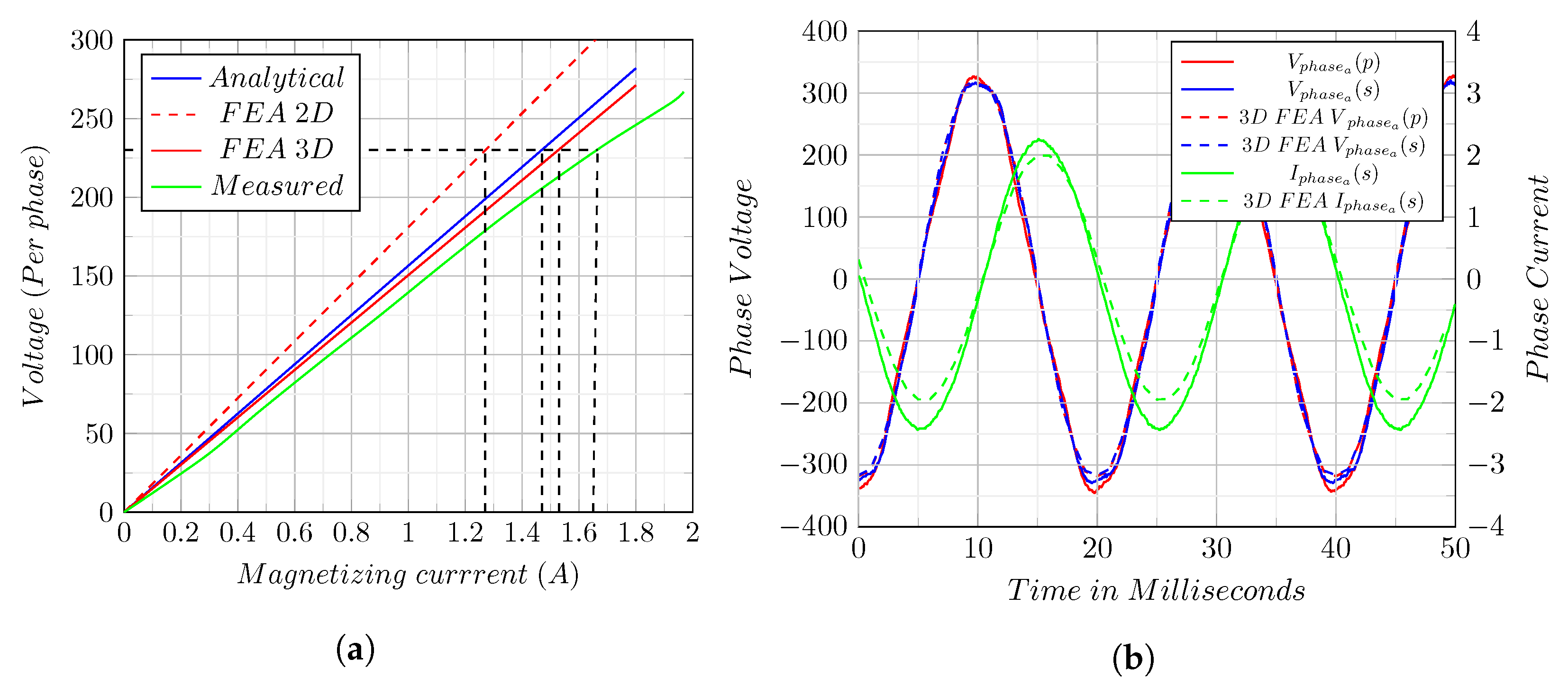
The open circuit voltage versus supply current characteristic is shown in
Figure 11a. In this figure, it is clear that the 3D FEA result was the closest to the measured one, with only a 7.54% deviation. Surprisingly, the analytically calculated characteristic was also better than the 2D FEA result due to the correction factors at only a 11.5% deviation from the measured results. Therefore, care needs to be taken when using 2D FEA in rotary transformer analysis. The primary and secondary induced voltages and currents are shown in
Figure 11b. The FEA results and the measurement results compare very well. The equivalent circuit parameters are shown in
Table 5. An LCR meter was used to measure the inductances. Furthermore, the equivalent circuit parameters were calculated from the open circuit (OC) and short circuit (SC) tests. A good correlation between the analytical, FEA and measurement results can be observed in
Table 5. The largest calculation error was expected for the open circuit case.
4.3.2. Full-Load Test
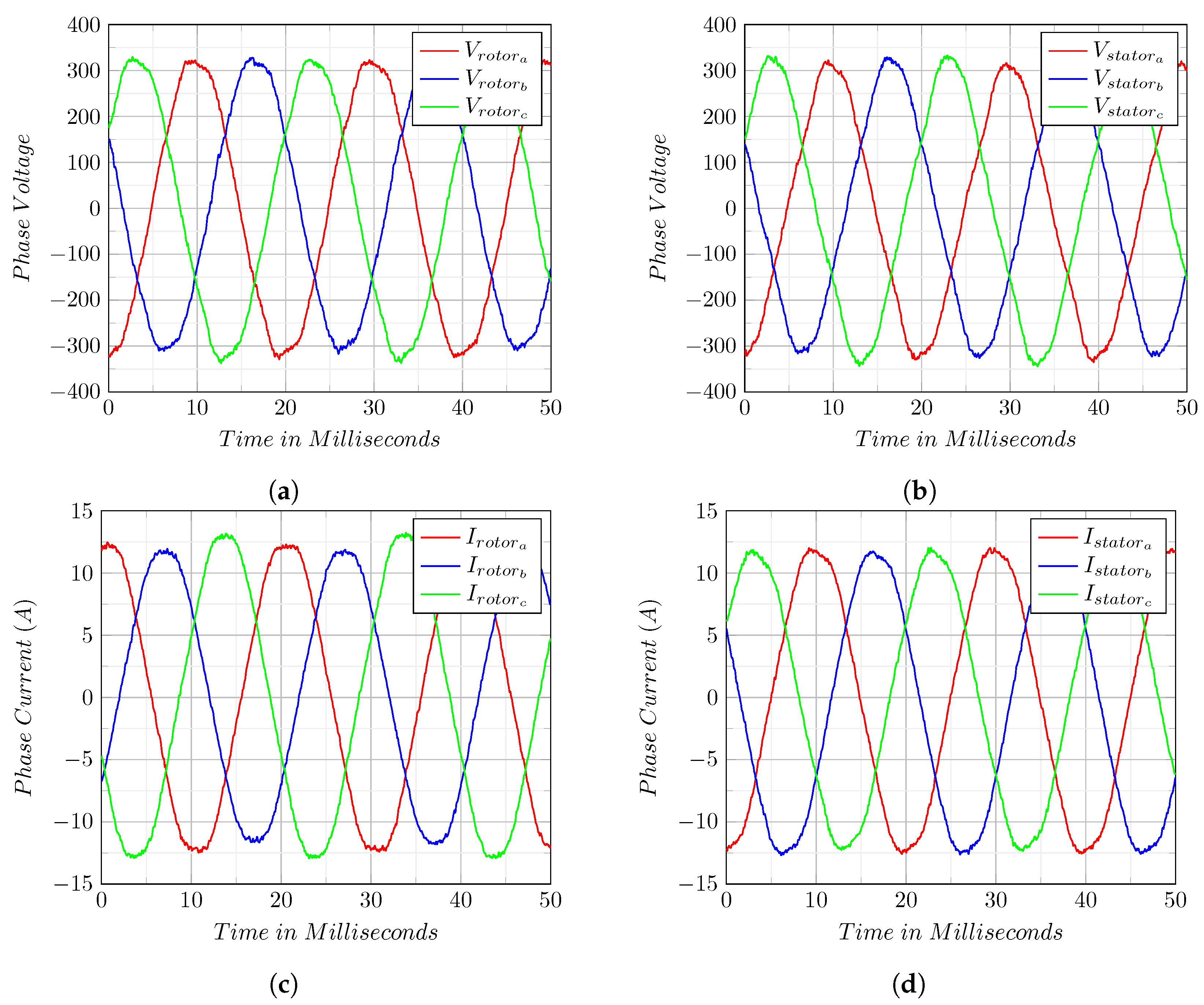
The full-load test was conducted while the rotary transformer was kept stationary. The measured voltage and current waveforms are shown in
Figure 12. The measurement results at rated input voltage, rated output voltage and 1.3 PU load are shown in
Table 6. In all the conditions in
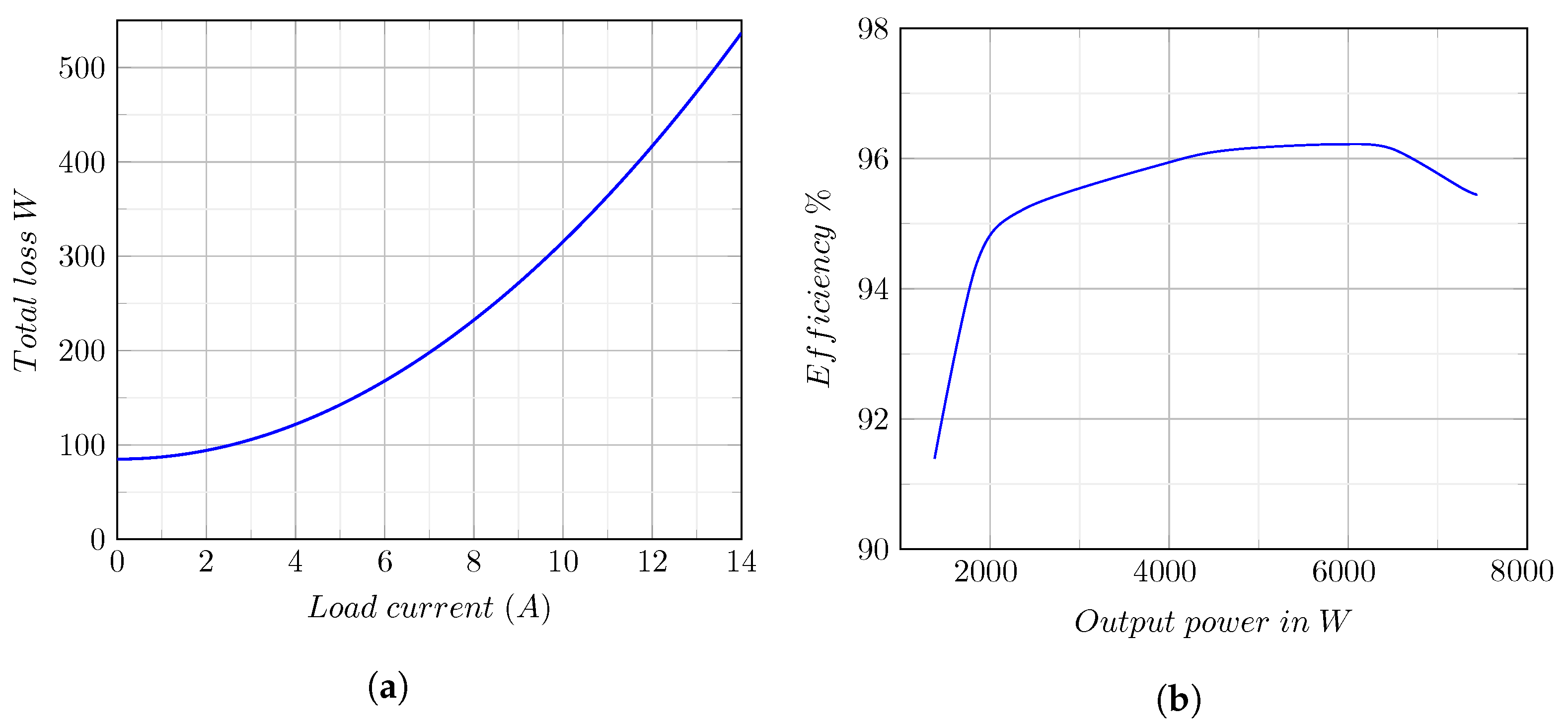
Table 6, the measured efficiency was above 95 % at a power factor above 0.9. The voltage regulation of the rotary transformer was on average at 6%, but phase C had a lower voltage regulation of 8%, possibly due to higher leakage inductance. The total harmonic distortion was measured to be 1.6% for the output voltage. The total losses (core, hysteresis and copper) curve is shown in
Figure 13a and the efficiency curve at the rated input voltage is shown in
Figure 13b.
4.3.3. Rotary Transformer–RDFIG Coupling Parameter Tests
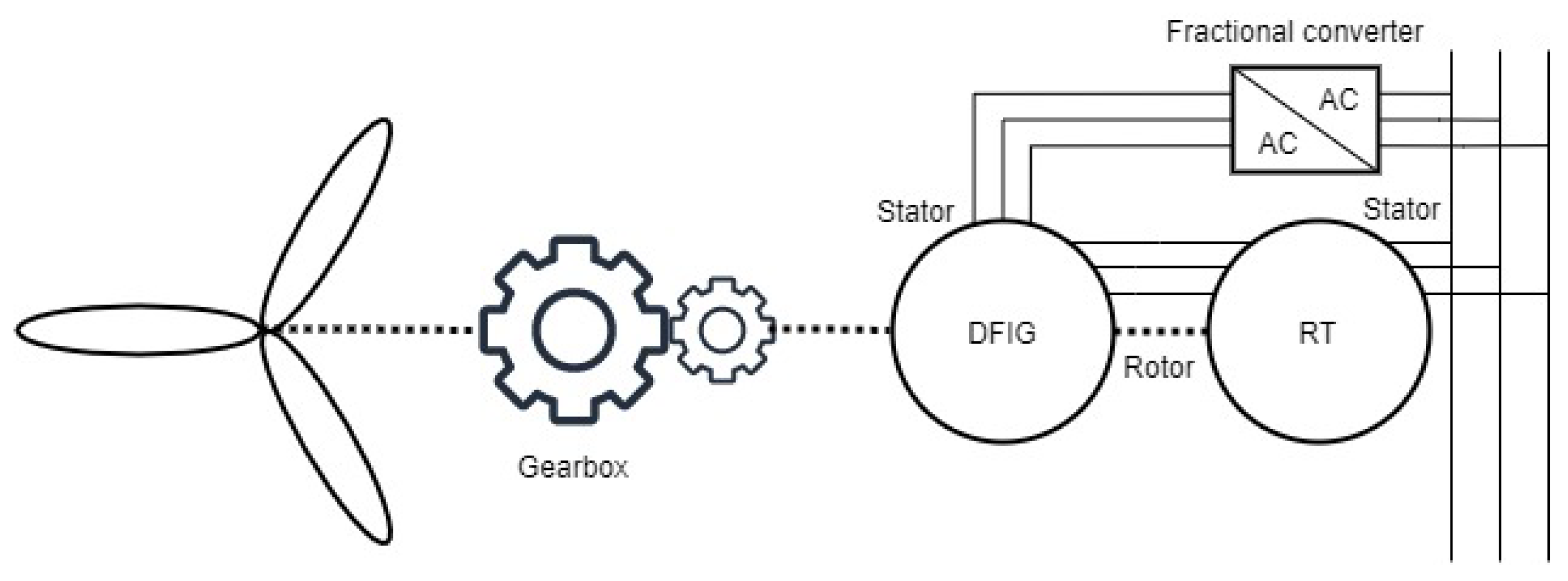
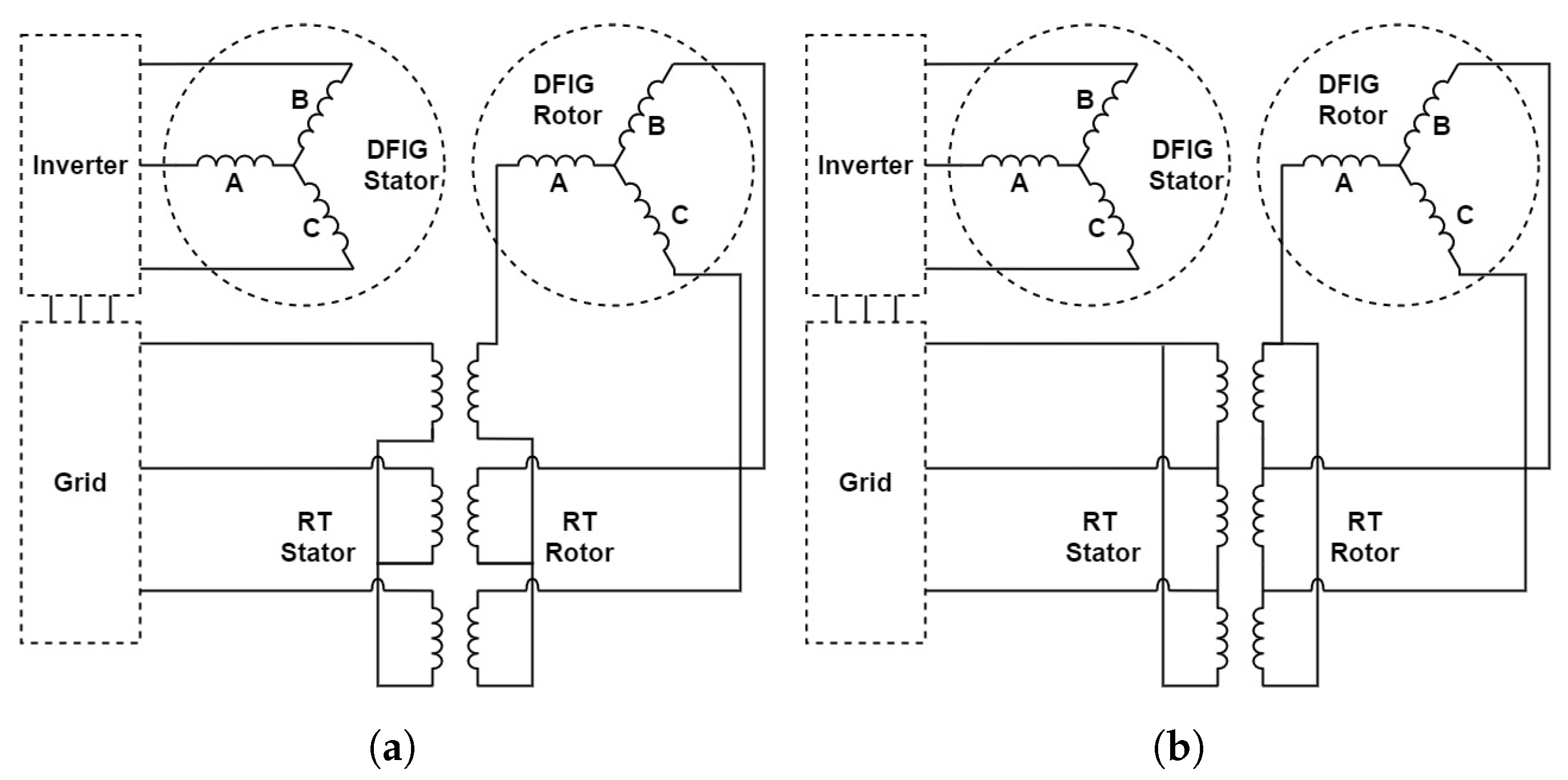
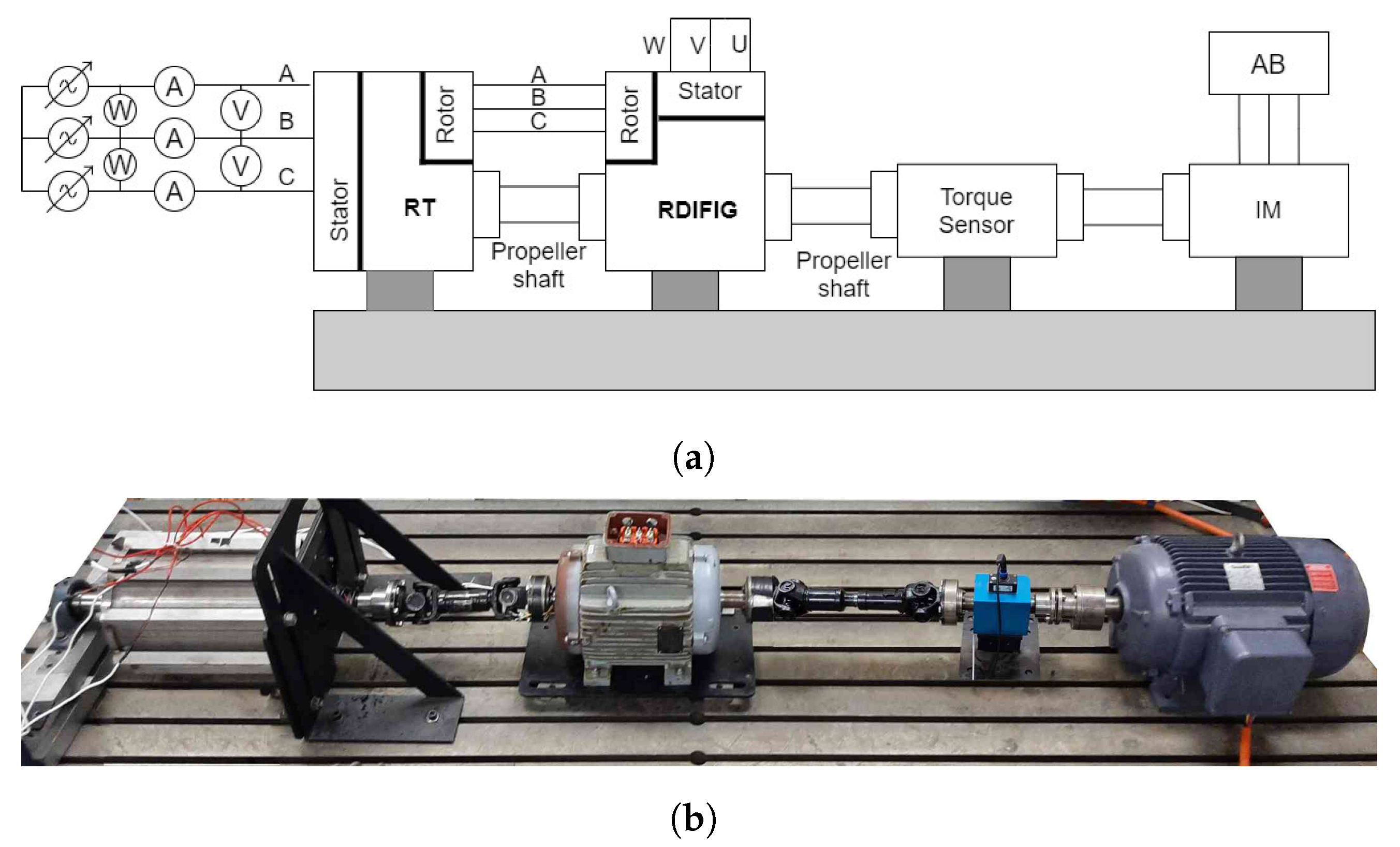
The rotary transformer was then loosely coupled to a 5.5 kW, four-pole rotor-tied-DFIG (RDFIG) prototype that was developed by [
14]. The power rating of the rotor of the RDFIG was not matched to that of the rotary transformer, but it provided a suitable test platform to investigate the rotary transformer’s performance at rated speed. The slip-ring and brush assembly were removed from the RDFIG and the rotor could only be accessed through the rotary transformer. The test setup and connection diagram are shown in
Figure 14.
The rotary transformer–RDFIG setup was tested under a no-load condition at a synchronous speed. The stator (control) windings were open circuit on the RDFIG, with an induction machine supplying mechanical power to the setup at 1500 rpm. The no-load tests can be seen in
Table 7 with all the parameters shown as if the rotary transformer–RDFIG were tested as a single system. The rotary transformer increased the power required by the RDFIG to achieve rated voltage due to extra magnetization requirements. The rotary transformer was an inductive load; therefore, the power factor was very low, which was to be expected. The blocked rotor test was conducted with the machine at a standstill; the control windings were shorted and the voltages increased until the rated rotor current was reached. The test results are shown in
Table 8.
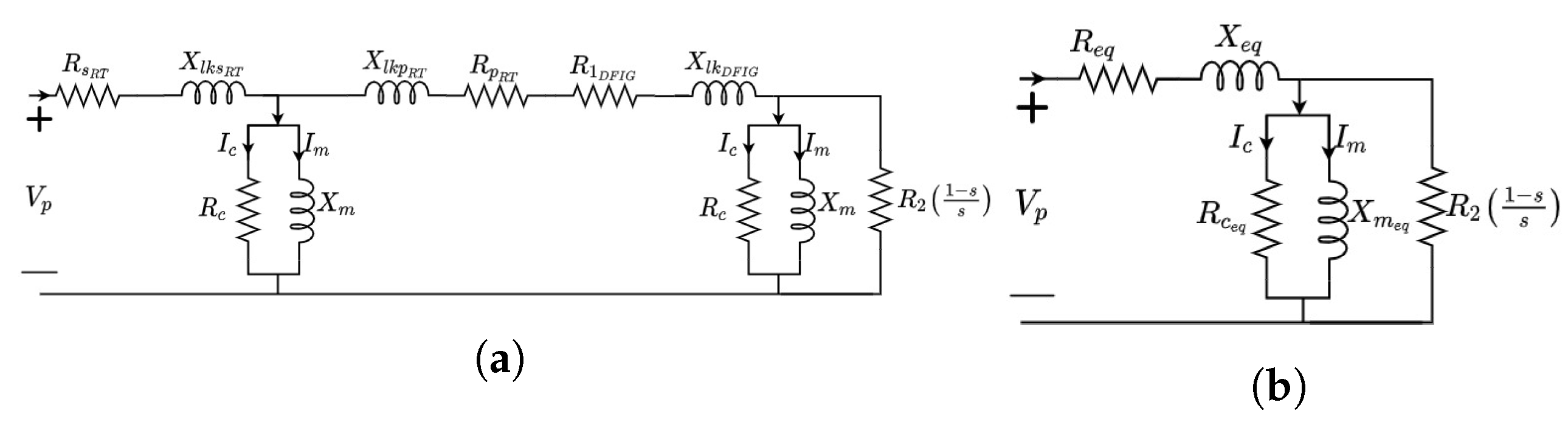
The full equivalent circuit of the rotary transformer–RDFIG was a cascaded circuit consisting of both the rotary transformer and the RDFIG (
Figure 15a). Analyzing this circuit is difficult; therefore, the new equivalent circuit model for the rotary transformer–RDFIG is presented as a simplified model and can be seen in
Figure 15b. The series inductance and resistance were combined into a single variable, while the two magnetizing branches were assumed to be in parallel and combined into one equivalent branch. The final parameters measured from the no-load and blocked rotor tests are shown in
Table 9.
4.3.4. Rotary Transformer–RDFIG Load Testing
To test the output power of the rotary transformer–RDFIG, the RDFIG was operated at a synchronous speed and unity power factor. A DC current was applied to the stator of the RDFIG with resistive loads to ensure a unity power factor on the output. Due to the lagging PF of the rotary transformer, the RDFIG had a leading internal PF, reducing the efficiency of the system. The test results are shown in
Table 10.
The RDFIG was able to operate at an efficiency of 87% when measured in the synchronous mode, with a total harmonic distortion on the voltage of 3.83%. The rotary-transformer-coupled RDFIG achieved an efficiency of 82% due to the additional losses of adding the the rotary transformer to the setup compared to the slip-ring assembly, but due to the increased series inductance, both the voltage and current total harmonic distortion were much lower, at 1.93% and 1.85%, respectively. The test proves that the rotary transformer can be used to couple the RDFIG without the use of a slip-ring and brush assembly.



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}