
A Multiobjective Artificial-Hummingbird-Algorithm-Based Framework for Optimal Reactive Power Dispatch Considering Renewable Energy Sources
 , , , ,
, , , ,
Abstract
:1. Introduction
- The artificial hummingbird algorithm (AHA) is the latest, efficient and robust approach, and it has not been investigated for the optimization of the ORPD problem so far. A new ORPD optimization framework embedded with AHA is proposed for the minimization of and .
- A multiobjective framework based on Pareto optimality, incorporating and together, is modeled and formulated to solve the MO-ORPD problem.
- The ORPD problem is investigated for a probabilistic modeling of load, solar PV and wind energy sources uncertainties.
- The statistical tests are performed using SPSS (Statistical Package for the Social Sciences) software to validate the effectiveness of the results obtained using the proposed framework.
2. Problem Formulation
2.1. Minimization of
2.2. Minimization of
2.3. Minimization of and a Considering Multiobjective Framework
2.4. Constraints
2.4.1. Equality Constraints
2.4.2. Inequality Constraints
Generator Constraints
Load Angle Constraint
Switchable Shunt VAR Compensator Constraint
OLTC Constraint
System Constraints
2.5. Integration of Renewable Energy Sources in ORPD Problem
2.5.1. Scenario-Based Probabilistic Modeling
2.5.2. Solar PV Uncertainty Modeling
2.5.3. Wind Speed Uncertainty Modeling
2.5.4. Load Demand Uncertainty Modeling
2.5.5. Combined Load Generation Model
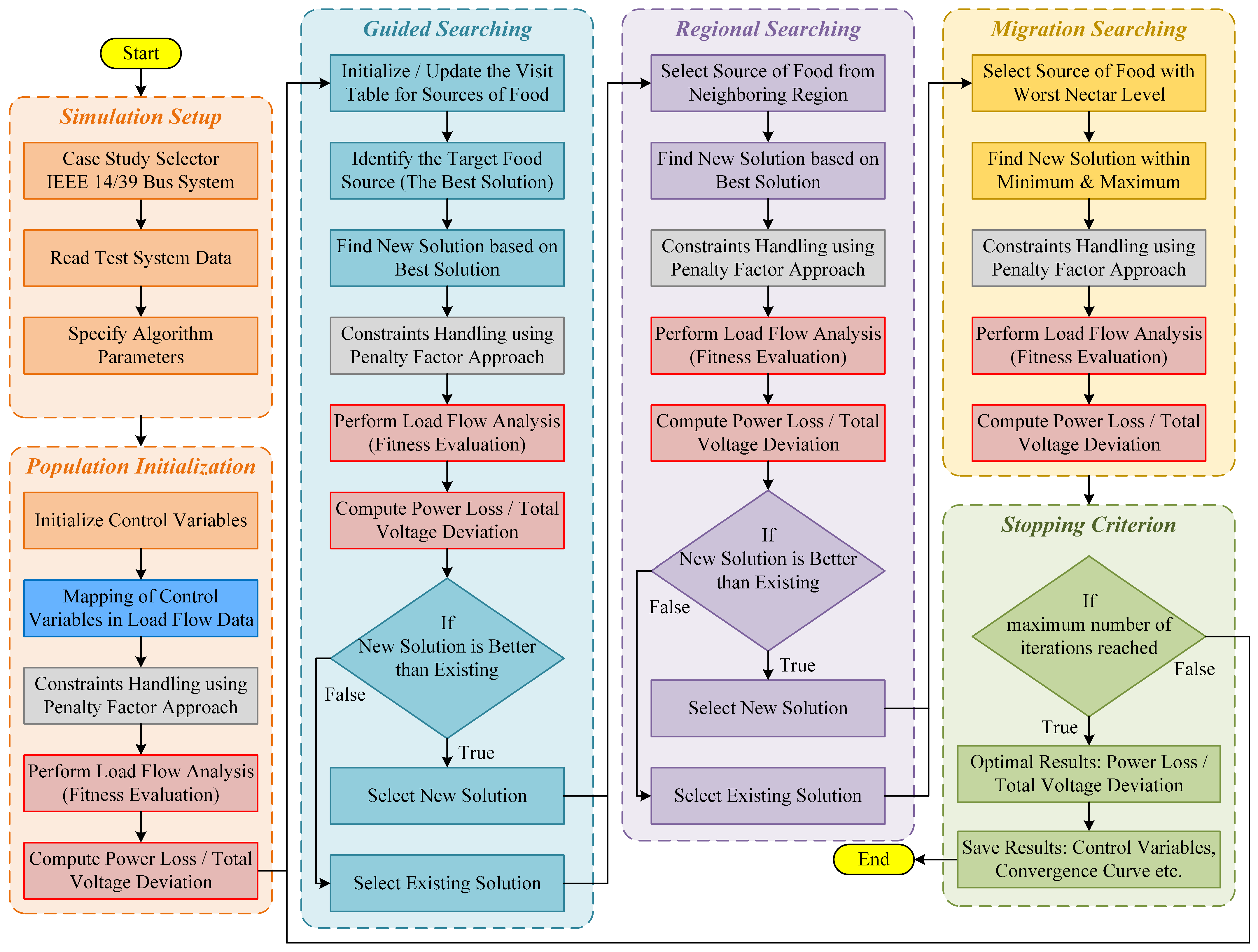
3. Artificial-Hummingbird-Algorithm-Based Framework for Optimal Reactive Power Dispatch Problem
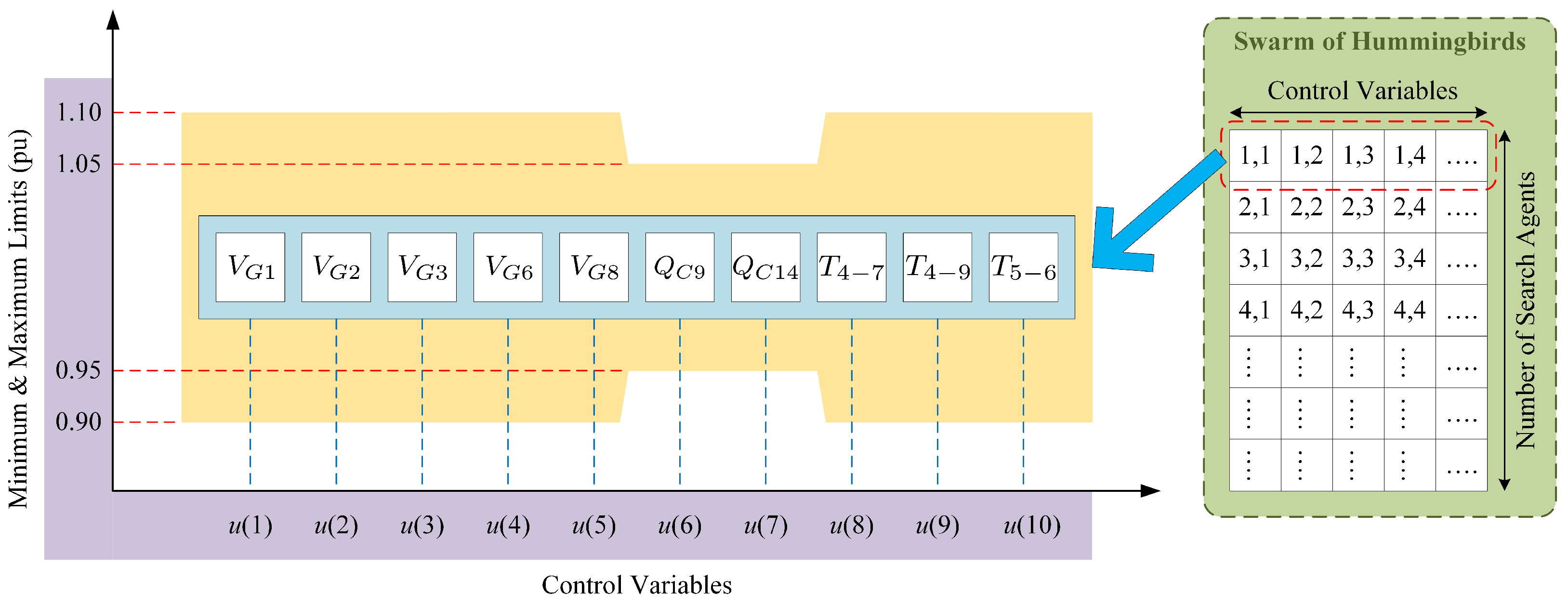
3.1. Mapping Procedure for Control Variables
3.2. Artificial Hummingbird Algorithm
3.3. Multiobjective Artificial Hummingbird Algorithm (MO-AHA)
3.4. Constraints Handling Using Penalty Factor Approach
4. Simulation Results and Discussion
4.1. IEEE 14 Bus Test System Considering Minimization of
4.2. IEEE 14 Bus Test System Considering Minimization of
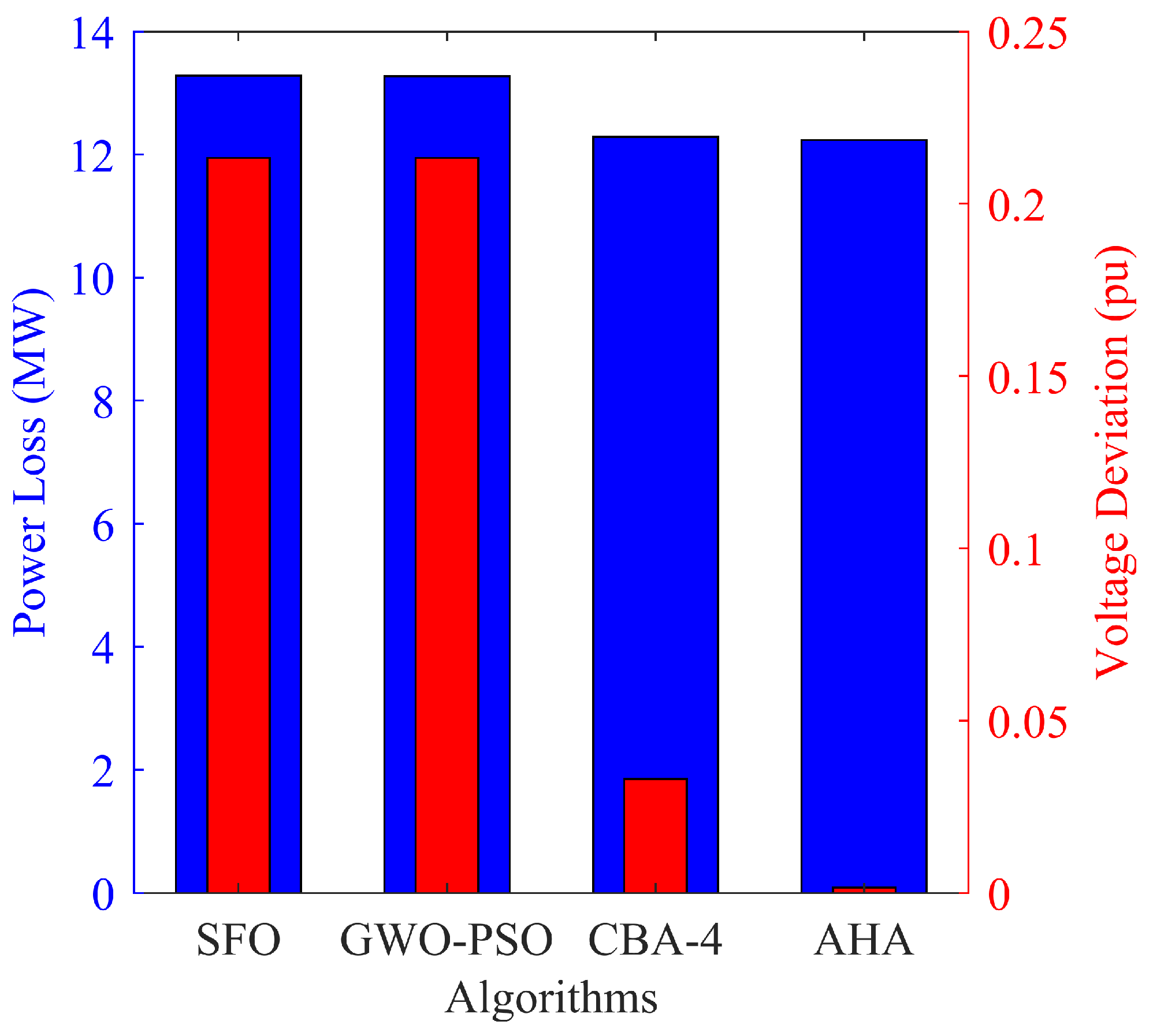
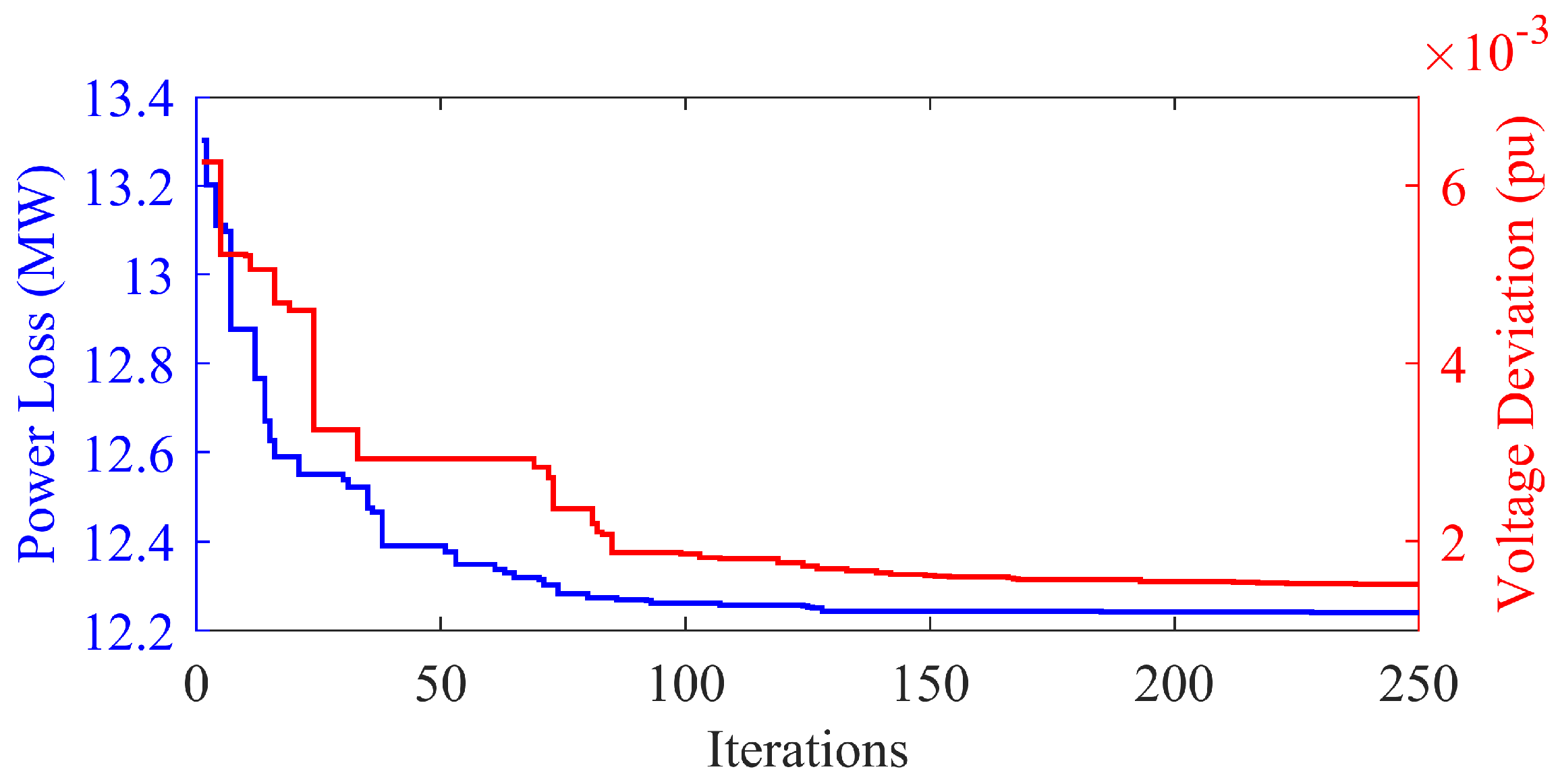
4.3. IEEE 14 Bus Test System Considering Multiobjective Framework
4.4. IEEE 14 Bus Test System Considering Integration of Renewable Energy Sources
4.5. IEEE 39 Bus Test System Considering Minimization of
4.6. IEEE 39 Bus Test System Considering Minimization of
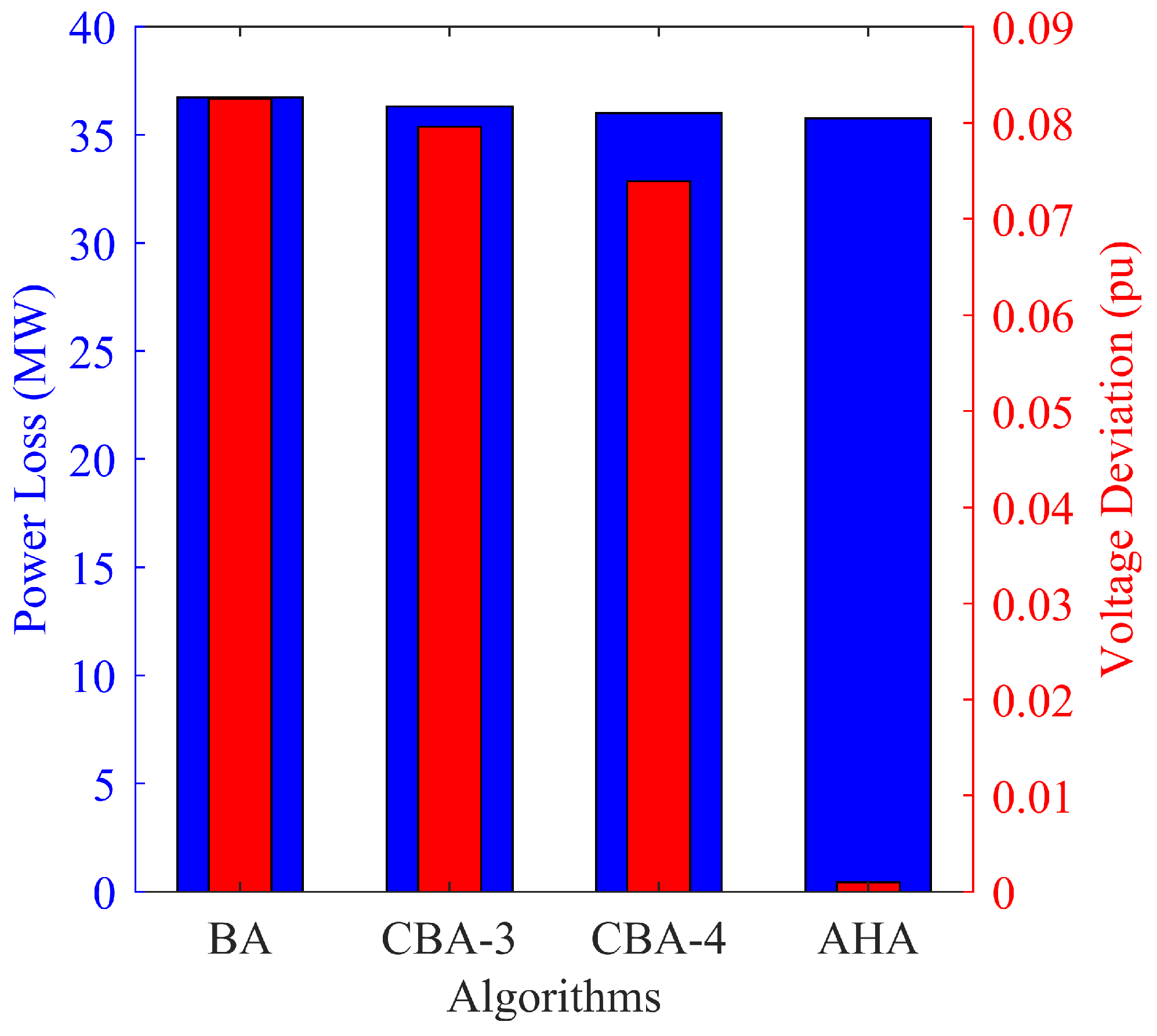
4.7. IEEE 39 Bus Test System Considering Multiobjective Framework
4.8. Statistical Significance of ORPD Results
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Seifi, H.; Sepasian, M.S. Electric Power System Planning: Issues, Algorithms and Solutions; Springer: Berlin/Heidelberg, Germany, 2011; Volume 49. [Google Scholar]
- AlRashidi, M.; El-Hawary, M. Applications of computational intelligence techniques for solving the revived optimal power flow problem. Electr. Power Syst. Res. 2009, 79, 694–702. [Google Scholar] [CrossRef]
- Balu, K.; Mukherjee, V. Optimal siting and sizing of distributed generation in radial distribution system using a novel student psychology-based optimization algorithm. Neural Comput. Appl. 2021, 33, 15639–15667. [Google Scholar] [CrossRef]
- Yuvaraj, T.; Devabalaji, K.; Srinivasan, S.; Prabaharan, N.; Hariharan, R.; Alhelou, H.H.; Ashokkumar, B. Comparative analysis of various compensating devices in energy trading radial distribution system for voltage regulation and loss mitigation using Blockchain technology and Bat Algorithm. Energy Rep. 2021, 7, 8312–8321. [Google Scholar] [CrossRef]
- Saddique, M.S.; Bhatti, A.R.; Haroon, S.S.; Sattar, M.K.; Amin, S.; Sajjad, I.A.; ul Haq, S.S.; Awan, A.B.; Rasheed, N. Solution to optimal reactive power dispatch in transmission system using meta-heuristic techniques―Status and technological review. Electr. Power Syst. Res. 2020, 178, 106031. [Google Scholar] [CrossRef]
- Lee, K.Y.; Yang, F.F. Optimal reactive power planning using evolutionary algorithms: A comparative study for evolutionary programming, evolutionary strategy, genetic algorithm, and linear programming. IEEE Trans. Power Syst. 1998, 13, 101–108. [Google Scholar] [CrossRef]
- Quintana, V.; Santos-Nieto, M. Reactive-power dispatch by successive quadratic programming. IEEE Trans. Energy Convers. 1989, 4, 425–435. [Google Scholar] [CrossRef]
- Wu, Q.H.; Ma, J. Power system optimal reactive power dispatch using evolutionary programming. IEEE Trans. Power Syst. 1995, 10, 1243–1249. [Google Scholar] [CrossRef]
- Manasvi, K.; Venkateswararao, B.; Devarapalli, R.; Prasad, U. PSO Based Optimal Reactive Power Dispatch for the Enrichment of Power System Performance. In Recent Advances in Power Systems; Springer: Berlin/Heidelberg, Germany, 2021; pp. 267–276. [Google Scholar]
- Saddique, M.S.; Habib, S.; Haroon, S.S.; Bhatti, A.R.; Amin, S.; Ahmed, E.M. Optimal Solution of Reactive Power Dispatch in Transmission System to Minimize Power Losses using Sine-Cosine Algorithm. IEEE Access 2022, 10, 20223–20239. [Google Scholar] [CrossRef]
- Shanono, I.H.; Muhammad, A.; Abdullah, N.R.H.; Daniyal, H.; Tiong, M.C. Optimal reactive power dispatch: A bibliometric analysis. J. Electr. Syst. Inf. Technol. 2021, 8, 1–23. [Google Scholar] [CrossRef]
- Roy, R.; Das, T.; Mandal, K.K. Optimal reactive power dispatch using a novel optimization algorithm. J. Electr. Syst. Inf. Technol. 2021, 8, 1–24. [Google Scholar] [CrossRef]
- Abdel-Fatah, S.; Ebeed, M.; Kamel, S. Optimal reactive power dispatch using modified sine cosine algorithm. In Proceedings of the 2019 International Conference on Innovative Trends in Computer Engineering (ITCE, Aswan, Egypt, 2–4 February 2019; pp. 510–514. [Google Scholar]
- Mugemanyi, S.; Qu, Z.; Rugema, F.X.; Dong, Y.; Bananeza, C.; Wang, L. Optimal reactive power dispatch using chaotic bat algorithm. IEEE Access 2020, 8, 65830–65867. [Google Scholar] [CrossRef]
- Najafi, A.; Falaghi, H. Optimal reactive power dispatch using teaching learning based optimization algorithm in the presence of wind turbine uncertainty. Iran. Electr. Ind. J. Qual. Product. 2018, 7, 93–101. [Google Scholar]
- Reddy, S.S. Optimal Reactive Power Scheduling Using Cuckoo Search Algorithm. Int. J. Electr. Comput. Eng. 2017, 7, 2349–2356. [Google Scholar]
- Chen, G.; Liu, L.; Zhang, Z.; Huang, S. Optimal reactive power dispatch by improved GSA-based algorithm with the novel strategies to handle constraints. Appl. Soft Comput. 2017, 50, 58–70. [Google Scholar] [CrossRef]
- Shaheen, M.A.; Hasanien, H.M.; Alkuhayli, A. A novel hybrid GWO-PSO optimization technique for optimal reactive power dispatch problem solution. Ain Shams Eng. J. 2021, 12, 621–630. [Google Scholar] [CrossRef]
- Khan, N.H.; Wang, Y.; Tian, D.; Jamal, R.; Ebeed, M.; Deng, Q. Fractional PSOGSA algorithm approach to solve optimal reactive power dispatch problems with uncertainty of renewable energy resources. IEEE Access 2020, 8, 215399–215413. [Google Scholar] [CrossRef]
- Aljohani, T.M.; Ebrahim, A.F.; Mohammed, O. Single and multiobjective optimal reactive power dispatch based on hybrid artificial physics–particle swarm optimization. Energies 2019, 12, 2333. [Google Scholar] [CrossRef] [Green Version]
- Wei, Y.; Zhou, Y.; Luo, Q.; Deng, W. Optimal reactive power dispatch using an improved slime mould algorithm. Energy Rep. 2021, 7, 8742–8759. [Google Scholar] [CrossRef]
- Abd-El Wahab, A.M.; Kamel, S.; Hassan, M.H.; Mosaad, M.I.; AbdulFattah, T.A. Optimal Reactive Power Dispatch Using a Chaotic Turbulent Flow of Water-Based Optimization Algorithm. Mathematics 2022, 10, 346. [Google Scholar] [CrossRef]
- Naderi, E.; Narimani, H.; Pourakbari-Kasmaei, M.; Cerna, F.V.; Marzband, M.; Lehtonen, M. State-of-the-art of optimal active and reactive power flow: A comprehensive review from various standpoints. Processes 2021, 9, 1319. [Google Scholar] [CrossRef]
- Sánchez-Mora, M.M.; Bernal-Romero, D.L.; Montoya, O.D.; Villa-Acevedo, W.M.; López-Lezama, J.M. Solving the Optimal Reactive Power Dispatch Problem through a Python-DIgSILENT Interface. Computation 2022, 10, 128. [Google Scholar] [CrossRef]
- Zhou, B.; Shen, X.; Pan, C.; Bai, Y.; Wu, T. Optimal Reactive Power Dispatch under Transmission and Distribution Coordination Based on an Accelerated Augmented Lagrangian Algorithm. Energies 2022, 15, 3867. [Google Scholar] [CrossRef]
- Morán-Burgos, J.A.; Sierra-Aguilar, J.E.; Villa-Acevedo, W.M.; López-Lezama, J.M. A Multi-Period Optimal Reactive Power Dispatch Approach Considering Multiple Operative Goals. Appl. Sci. 2021, 11, 8535. [Google Scholar] [CrossRef]
- Ashraf, M.M.; Malik, T.N. Least cost generation expansion planning in the presence of renewable energy sources using correction matrix method with indicators-based discrete water cycle algorithm. J. Renew. Sustain. Energy 2019, 11, 056301. [Google Scholar] [CrossRef]
- Nawaz, U.; Malik, T.N.; Ashraf, M.M. Least-cost generation expansion planning using whale optimization algorithm incorporating emission reduction and renewable energy sources. Int. Trans. Electr. Energy Syst. 2020, 30, e12238. [Google Scholar] [CrossRef]
- Abbas, T.; Ashraf, M.M.; Malik, T.N. Least Cost Generation Expansion Planning considering Renewable Energy Resources Using Sine Cosine Algorithm. Arab. J. Sci. Eng. 2022, 1–19. [Google Scholar] [CrossRef]
- ElSayed, S.K.; Elattar, E.E. Slime Mold Algorithm for Optimal Reactive Power Dispatch Combining with Renewable Energy Sources. Sustainability 2021, 13, 5831. [Google Scholar] [CrossRef]
- Ashraf, M.M.; Malik, T.N. A Novel Optimization Framework for the Least Cost Generation Expansion Planning in the Presence of Renewable Energy Sources considering Regional Connectivity. Arab. J. Sci. Eng. 2020, 45, 6423–6451. [Google Scholar] [CrossRef]
- Ashraf, M.M.; Malik, T.N. A hybrid teaching–learning-based optimizer with novel radix-5 mapping procedure for minimum cost power generation planning considering renewable energy sources and reducing emission. Electr. Eng. 2020, 102, 2567–2582. [Google Scholar] [CrossRef]
- Ebeed, M.; Alhejji, A.; Kamel, S.; Jurado, F. Solving the optimal reactive power dispatch using marine predators algorithm considering the uncertainties in load and wind-solar generation systems. Energies 2020, 13, 4316. [Google Scholar] [CrossRef]
- Naidji, M.; Boudour, M. Stochastic multi-objective optimal reactive power dispatch considering load and renewable energy sources uncertainties: A case study of the Adrar isolated power system. Int. Trans. Electr. Energy Syst. 2020, 30, e12374. [Google Scholar] [CrossRef]
- Zhao, W.; Wang, L.; Mirjalili, S. Artificial hummingbird algorithm: A new bio-inspired optimizer with its engineering applications. Comput. Methods Appl. Mech. Eng. 2022, 388, 114194. [Google Scholar] [CrossRef]
- Zhao, W.; Zhang, Z.; Mirjalili, S.; Wang, L.; Khodadadi, N.; Mirjalili, S.M. An effective multi-objective artificial hummingbird algorithm with dynamic elimination-based crowding distance for solving engineering design problems. Comput. Methods Appl. Mech. Eng. 2022, 398, 115223. [Google Scholar] [CrossRef]
- Saadat, H. Power System Analysis; McGraw-Hill: New York, NY, USA, 1999. [Google Scholar]
- Rice, J.A. Mathematical Statistics and Data Analysis; Brooks/Cole ISE: Bonn, Germany, 2006. [Google Scholar]
- Athay, T.; Podmore, R.; Virmani, S. A practical method for the direct analysis of transient stability. IEEE Trans. Power Appar. Syst. 1979, PAS-98, 573–584. [Google Scholar] [CrossRef]
- Chung, C.; Liang, C.; Wong, K.; Duan, X. Hybrid algorithm of differential evolution and evolutionary programming for optimal reactive power flow. IET Gener. Transm. Distrib. 2010, 4, 84–93. [Google Scholar] [CrossRef]
- Liang, C.; Chung, C.; Wong, K.; Duan, X. Comparison and improvement of evolutionary programming techniques for power system optimal reactive power flow. IEEE Proc.-Gener. Transm. Distrib. 2006, 153, 228–236. [Google Scholar] [CrossRef]
- Liang, C.; Chung, C.; Wong, K.; Duan, X.; Tse, C. Study of differential evolution for optimal reactive power flow. IET Gener. Transm. Distrib. 2007, 1, 253–260. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Load Scenario | Load (%) | |
| P1 | 20 (off-peak) | 0.25 |
| P2 | 40 (mid-peak) | 0.7 |
| P3 | 100 (on-peak) | 0.05 |
| PV Scenario | (MW) | |
| S1 | 0 | 0.481 |
| S2 | 0.485 | 0.374 |
| S3 | 0.145 | |
| Wind Scenario | (MW) | |
| W1 | 0 | 0.073 |
| W2 | 0.485 | 0.76 |
| W3 | 0.167 |
| Sr. No. | Parameter | Value |
|---|---|---|
| 1 | Generators | 5 |
| 2 | Branches | 20 |
| 3 | OLTC | 3 |
| 4 | Shunt VAR compensators | 2 |
| 5 | Control variables | 10 |
| Control Variable | Base Case | SFO [18] | GWO-PSO [18] | CBA-4 [14] | SCA [10] | AHA |
|---|---|---|---|---|---|---|
| 1.0600 | 1.0171 | 1.0534 | 1.0921 | 1.09 | 1.0999 | |
| 1.0450 | 0.9909 | 1.0600 | 1.0884 | 1.08 | 1.0863 | |
| 1.0100 | 0.9520 | 0.9400 | 1.0588 | 1.05 | 1.0899 | |
| 1.0700 | 1.0099 | 0.9525 | 1.0325 | 1.09 | 1.0999 | |
| 1.0900 | 1.0279 | 0.9561 | 1.0951 | 1.09 | 1.0872 | |
| 0.1800 | - | - | 0.2208 | 0.15 | 0.2917 | |
| 0.1800 | - | - | 0.0786 | 0.06 | 0.0712 | |
| 0.9780 | 0.9980 | 0.9972 | 0.9746 | 0.95 | 1.0034 | |
| 0.9690 | 0.9867 | 0.9623 | 1.0676 | 0.94 | 0.9498 | |
| 0.9320 | 0.9788 | 0.9882 | 1.0599 | 1.03 | 0.9874 | |
| (MW) | 13.43 | 13.2786 | 13.2716 | 12.2923 | 12.27 | 12.2349 |
| (pu) | 0.0278 | - | - | 0.05308 | - | 0.0821 |
| Control Variable | Base Case | SFO | GWO-PSO | CBA-4 | AHA |
|---|---|---|---|---|---|
| 1.06 | 0.94 | 1.06 | 0.9958 | 1.0776 | |
| 1.045 | 0.94 | 0.982 | 1.0189 | 1.0396 | |
| 1.01 | 1.06 | 1.0331 | 1.0008 | 0.9982 | |
| 1.07 | 0.94 | 1.06167 | 1.0102 | 1.0161 | |
| 1.09 | 1.06 | 1.0225 | 1.0501 | 0.9533 | |
| 0.18 | 0.2 | 0.2 | 0.0903 | 0.2485 | |
| 0.18 | 0.05 | 0.005 | 0.0637 | 0.1604 | |
| 0.978 | 1.1 | 1.1 | 1.0121 | 1.0973 | |
| 0.969 | 1.1 | 1.1 | 1.0975 | 0.9 | |
| 0.932 | 0.9 | 0.9 | 1.037 | 0.9366 | |
| (MW) | 13.43 | - | - | 15.9506 | 14.934 |
| (pu) | 0.0278 | 0.2133 | 0.2133 | 0.033 | 0.00152 |
| Scenario | Load | Wind Output | PV Output | Power Loss (MW) | Expected Power Loss (MW) | ||||
|---|---|---|---|---|---|---|---|---|---|
| 1 | Off-peak | 0 | 0 | 0.25 | 0.073 | 0.481 | 0.0088 | 4.4670 | 0.0393 |
| 2 | Off-peak | 0 | 0.485 | 0.25 | 0.073 | 0.374 | 0.0068 | 3.8289 | 0.0260 |
| 3 | Off-peak | 0 | 0.25 | 0.073 | 0.145 | 0.0026 | 3.3015 | 0.0086 | |
| 4 | Off-peak | 0.47 | 0 | 0.25 | 0.76 | 0.481 | 0.0914 | 3.8815 | 0.3548 |
| 5 | Off-peak | 0.47 | 0.485 | 0.25 | 0.76 | 0.374 | 0.0711 | 3.4041 | 0.2420 |
| 6 | Off-peak | 0.47 | 0.25 | 0.76 | 0.145 | 0.0276 | 3.0444 | 0.0840 | |
| 7 | Off-peak | 0 | 0.25 | 0.167 | 0.481 | 0.0201 | 3.7914 | 0.0762 | |
| 8 | Off-peak | 0.485 | 0.25 | 0.167 | 0.374 | 0.0156 | 3.4671 | 0.0541 | |
| 9 | Off-peak | 0.25 | 0.167 | 0.145 | 0.0061 | 3.2845 | 0.0200 | ||
| 10 | Mid-peak | 0 | 0 | 0.7 | 0.073 | 0.481 | 0.0246 | 5.8392 | 0.1436 |
| 11 | Mid-peak | 0 | 0.485 | 0.7 | 0.073 | 0.374 | 0.0191 | 4.9905 | 0.0953 |
| 12 | Mid-peak | 0 | 0.7 | 0.073 | 0.145 | 0.0074 | 4.2293 | 0.0313 | |
| 13 | Mid-peak | 0.47 | 0 | 0.7 | 0.76 | 0.481 | 0.2559 | 4.9863 | 1.2760 |
| 14 | Mid-peak | 0.47 | 0.485 | 0.7 | 0.76 | 0.374 | 0.199 | 4.3008 | 0.8559 |
| 15 | Mid-peak | 0.47 | 0.7 | 0.76 | 0.145 | 0.0771 | 3.7202 | 0.2868 | |
| 16 | Mid-peak | 0 | 0.7 | 0.167 | 0.481 | 0.0562 | 4.6419 | 0.2609 | |
| 17 | Mid-peak | 0.485 | 0.7 | 0.167 | 0.374 | 0.0437 | 4.1188 | 0.1800 | |
| 18 | Mid-peak | 0.7 | 0.167 | 0.145 | 0.017 | 3.7169 | 0.0632 | ||
| 19 | On-peak | 0 | 0 | 0.05 | 0.073 | 0.481 | 0.0018 | 12.2471 | 0.0220 |
| 20 | On-peak | 0 | 0.485 | 0.05 | 0.073 | 0.374 | 0.0014 | 10.7231 | 0.0150 |
| 21 | On-peak | 0 | 0.05 | 0.073 | 0.145 | 0.0005 | 9.2336 | 0.0046 | |
| 22 | On-peak | 0.47 | 0 | 0.05 | 0.76 | 0.481 | 0.0183 | 10.5980 | 0.1939 |
| 23 | On-peak | 0.47 | 0.485 | 0.05 | 0.76 | 0.374 | 0.0142 | 9.2524 | 0.1314 |
| 24 | On-peak | 0.47 | 0.05 | 0.76 | 0.145 | 0.0055 | 7.9573 | 0.0438 | |
| 25 | On-peak | 0 | 0.05 | 0.167 | 0.481 | 0.004 | 9.4285 | 0.0377 | |
| 26 | On-peak | 0.485 | 0.05 | 0.167 | 0.374 | 0.0031 | 8.2666 | 0.0256 | |
| 27 | On-peak | 0.05 | 0.167 | 0.145 | 0.0012 | 7.1599 | 0.0086 | ||
| Total Expected Power Loss | 4.5807 | ||||||||
| Sr. No. | Parameter | Value |
|---|---|---|
| 1 | Generators | 10 |
| 2 | Branches | 46 |
| 3 | OLTC | 5 |
| 4 | Compensators | 6 |
| 5 | Control variables | 21 |
| Control Variable | Base Case | BA [14] | CBA-3 [14] | CBA-4 [14] | AHA |
|---|---|---|---|---|---|
| 1.0499 | 1.0906 | 1.0668 | 1.0810 | 1.0920 | |
| 0.9820 | 1.0999 | 1.0968 | 1.0999 | 1.0993 | |
| 0.9841 | 1.0998 | 1.0989 | 1.1000 | 1.0898 | |
| 0.9972 | 1.0943 | 1.0857 | 1.0952 | 1.0997 | |
| 1.0123 | 1.0956 | 1.0941 | 1.0999 | 1.0972 | |
| 1.0494 | 1.1000 | 1.0976 | 1.1000 | 1.0949 | |
| 1.0636 | 1.0989 | 1.1000 | 1.0992 | 1.0999 | |
| 1.0275 | 1.1000 | 1.1000 | 1.1000 | 1.0996 | |
| 1.0265 | 1.0992 | 1.0988 | 1.0996 | 1.0998 | |
| 1.0300 | 1.1000 | 1.1000 | 1.1000 | 1.0844 | |
| 0 | 0.1985 | 0.2392 | 0.2092 | 0.01299 | |
| 0 | 0.1266 | 0.0729 | 0.1188 | 0.2353 | |
| 0 | 0.1985 | 0.2392 | 0.2092 | 0.1172 | |
| 0 | 0.1266 | 0.0729 | 0.1188 | 0.2388 | |
| 0 | 0.1985 | 0.2392 | 0.2092 | 0.2883 | |
| 0 | 0.1985 | 0.2392 | 0.2092 | 0.0444 | |
| 1.0250 | 1.0478 | 1.0591 | 1.0485 | 1.0809 | |
| 1.0700 | 1.0700 | 1.0656 | 1.0703 | 1.0868 | |
| 1.0060 | 1.0250 | 1.0461 | 1.0337 | 1.0086 | |
| 1.0600 | 1.0700 | 1.0645 | 1.0701 | 1.0572 | |
| 1.0250 | 1.0034 | 0.9792 | 1.0072 | 1.0867 | |
| (MW) | 43.60 | 36.7317 | 36.3125 | 35.9971 | 35.7699 |
| (pu) | 0.033 | 0.275 | 0.271 | 0.269 | 0.638 |
| Control Variable | Base Case | BA | CBA-3 | CBA-4 | AHA |
|---|---|---|---|---|---|
| 1.0499 | 0.9395 | 1.0286 | 0.9423 | 1.022 | |
| 0.982 | 1.0999 | 1.0723 | 0.9124 | 1.0438 | |
| 0.9841 | 0.9995 | 0.9782 | 1.0483 | 1.018 | |
| 0.9972 | 1.069 | 1.0084 | 0.9723 | 1.0016 | |
| 1.0123 | 0.9474 | 0.9797 | 0.9983 | 0.9884 | |
| 1.0494 | 0.9151 | 1.0668 | 0.9011 | 1.0118 | |
| 1.0636 | 0.974 | 0.9279 | 0.9866 | 1.0156 | |
| 1.0275 | 0.9001 | 0.9512 | 0.9588 | 0.9006 | |
| 1.0265 | 0.9468 | 0.9362 | 1.0161 | 0.9791 | |
| 1.03 | 1.0995 | 1.0077 | 0.9772 | 0.981 | |
| 0 | 0.0533 | 0.2198 | 0.1234 | 0.2714 | |
| 0 | 0.1485 | 0.0554 | 0.2607 | 0.2862 | |
| 0 | 0.0533 | 0.2198 | 0.1234 | 0.0365 | |
| 0 | 0.1485 | 0.0554 | 0.2607 | 0.2817 | |
| 0 | 0.0533 | 0.2198 | 0.1234 | 0.143 | |
| 0 | 0.0533 | 0.2198 | 0.1234 | 0.2829 | |
| 1.025 | 0.9563 | 1.0325 | 1.0105 | 1.0201 | |
| 1.07 | 1.0559 | 0.9972 | 0.9017 | 0.9684 | |
| 1.006 | 0.9983 | 0.9731 | 0.9318 | 1.0244 | |
| 1.06 | 0.9124 | 0.9636 | 0.9193 | 0.9893 | |
| 1.025 | 0.9989 | 0.9457 | 0.9061 | 1.0253 | |
| (MW) | 43.6 | 53.74922 | 53.4682 | 51.6495 | 46.96 |
| (pu) | 0.033 | 0.0825 | 0.0796 | 0.0739 | 0.001 |
| Decision Variables | Beta | Sig. | Decision Variables | Beta | Sig. |
|---|---|---|---|---|---|
| −0.022 | 0.422 | −0.1 | 0.173 | ||
| 0.036 | 0.182 | 0.02 | 0.474 | ||
| −0.064 | 0.017 | 0.31 | 0.024 | ||
| −0.048 | 0.624 | 0.457 | 0.052 | ||
| −0.155 | 0.195 | −0.1 | 0.173 |
| Decision Variables | Beta | Sig. | Decision Variables | Beta | Sig. |
|---|---|---|---|---|---|
| −0.342 | 0.005 | −0.185 | 0.115 | ||
| 0.005 | 0.963 | 0.199 | 0.163 | ||
| −0.156 | 0.206 | −0.008 | 0.941 | ||
| −0.345 | 0.007 | 0.05 | 0.649 | ||
| −0.295 | 0.155 | −0.02 | 0.877 | ||
| −0.067 | 0.516 | −0.195 | 0.117 | ||
| −0.199 | 0.135 | −0.225 | 0.035 | ||
| −0.257 | 0.061 | −0.113 | 0.262 | ||
| −0.074 | 0.458 | −0.245 | 0.274 | ||
| −0.127 | 0.233 | −0.248 | 0.033 | ||
| −0.139 | 0.16 |
| IEEE 14 Bus Test System | ||||
| Algorithm | Best (MW) | Worst (MW) | Average (MW) | SD |
| DEEP [40] | 12.4489 | 12.4507 | 12.4494 | 0.0005 |
| CSSP4 [41] | 12.4087 | 12.4974 | 12.4393 | 0.228 |
| DE [42] | 12.4486 | 12.4496 | 12.4486 | 0.0018 |
| CBA-4 | 12.2923 | 12.3098 | 12.3042 | 0.0046 |
| AHA | 12.2349 | 12.2667 | 12.2443 | 0.0079 |
| Algorithm | Best () | Worst () | Average () | SD |
| IGSA-CSS [17] | 0.0339 | 0.0906 | 0.0458 | 0.017 |
| GWO-PSO | 0.2133 | - | - | - |
| BA | 0.0336 | 0.0515 | 0.041 | 0.0058 |
| CBA-4 | 0.033 | 0.0489 | 0.0368 | 0.0029 |
| AHA | 0.0015 | 0.0039 | 0.0037 | 0.0004 |
| IEEE 39 Bus Test System | ||||
| Algorithm | Best (MW) | Worst (MW) | Average (MW) | SD |
| GWO-PSO | 41.8892 | - | - | - |
| CBA-3 | 36.3125 | 37.7435 | 36.4527 | 0.3272 |
| CBA-4 | 35.9971 | 36.6986 | 36.1028 | 0.2122 |
| AHA | 35.7699 | 36.1857 | 35.9044 | 0.1098 |
| Algorithm | Best () | Worst () | Average () | SD |
| BA | 0.0825 | - | - | - |
| CBA-3 | 0.0796 | 0.0921 | 0.0846 | 0.0034 |
| CBA-4 | 0.0739 | 0.0864 | 0.0763 | 0.0027 |
| AHA | 0.001 | 0.0013 | 0.0011 | 5.0083 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Waleed, U.; Haseeb, A.; Ashraf, M.M.; Siddiq, F.; Rafiq, M.; Shafique, M. A Multiobjective Artificial-Hummingbird-Algorithm-Based Framework for Optimal Reactive Power Dispatch Considering Renewable Energy Sources. Energies 2022, 15, 9250. https://doi.org/10.3390/en15239250
Waleed U, Haseeb A, Ashraf MM, Siddiq F, Rafiq M, Shafique M. A Multiobjective Artificial-Hummingbird-Algorithm-Based Framework for Optimal Reactive Power Dispatch Considering Renewable Energy Sources. Energies. 2022; 15(23):9250. https://doi.org/10.3390/en15239250
Chicago/Turabian StyleWaleed, Umar, Abdul Haseeb, Muhammad Mansoor Ashraf, Faisal Siddiq, Muhammad Rafiq, and Muhammad Shafique. 2022. "A Multiobjective Artificial-Hummingbird-Algorithm-Based Framework for Optimal Reactive Power Dispatch Considering Renewable Energy Sources" Energies 15, no. 23: 9250. https://doi.org/10.3390/en15239250