
Aerodynamic Configuration Optimization of a Propeller Using Reynolds-Averaged Navier–Stokes and Adjoint Method

Abstract
:1. Introduction
2. Numerical Methodology
2.1. Governing Equations
2.2. Numerical Method
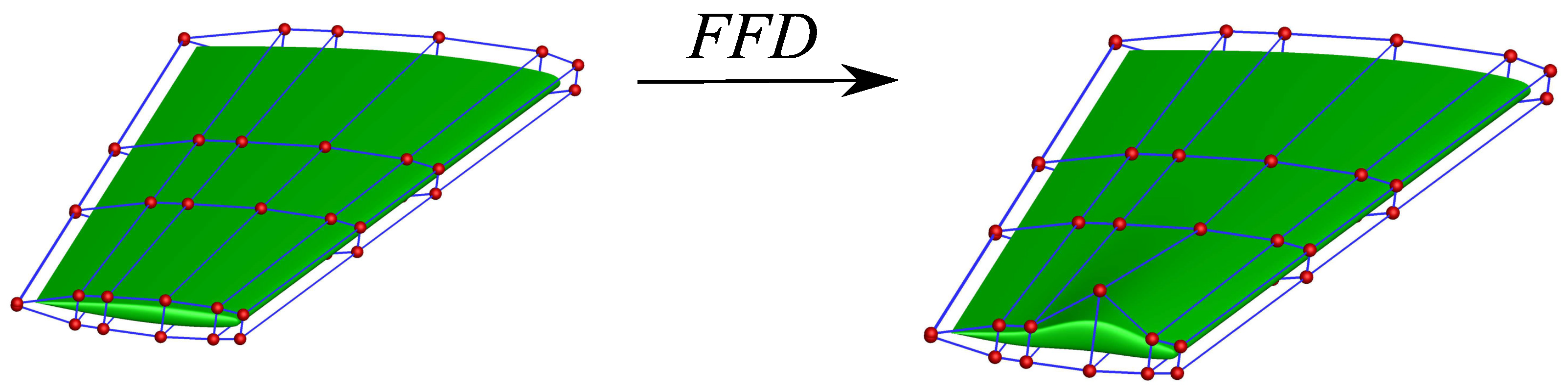
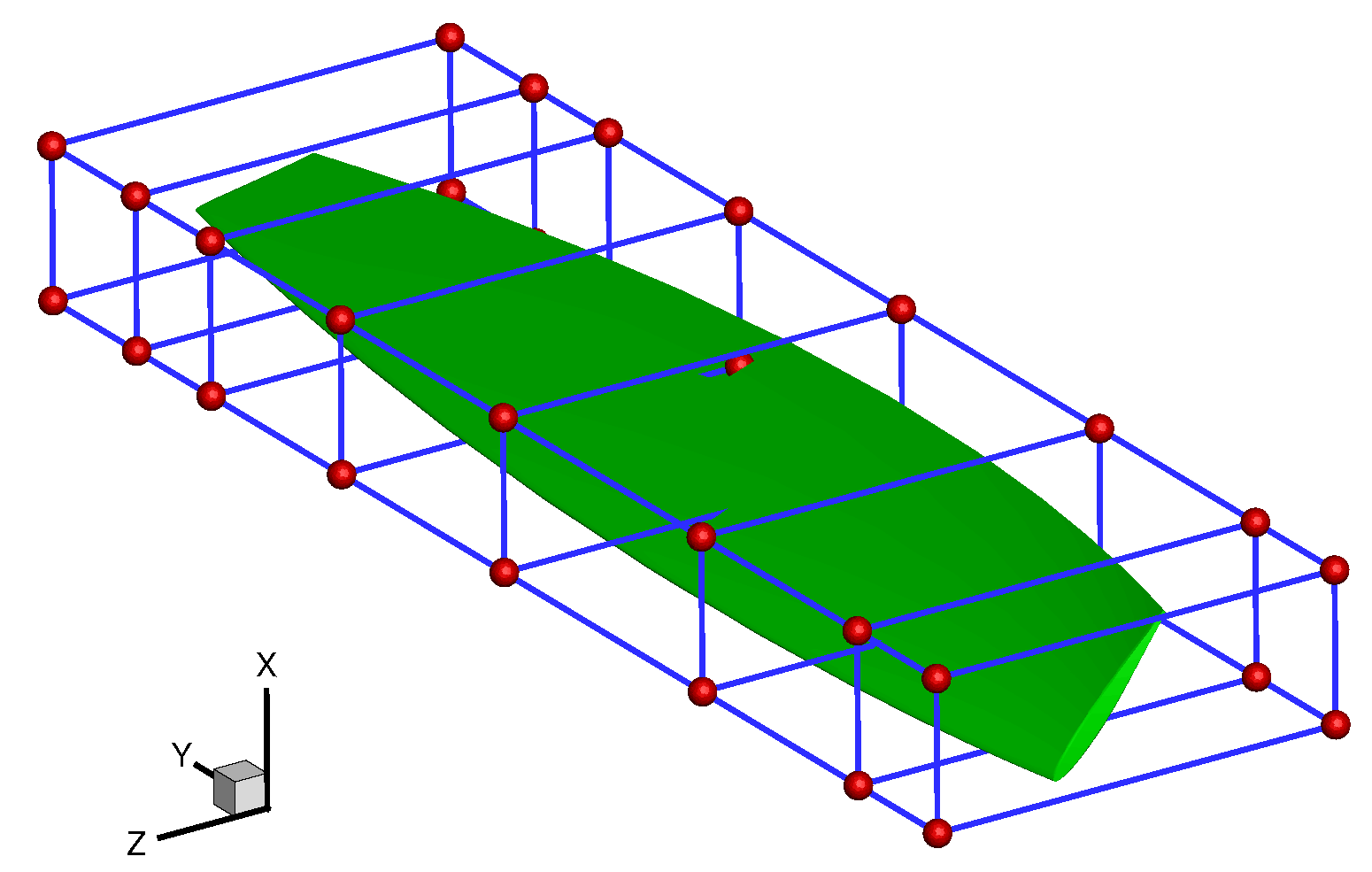
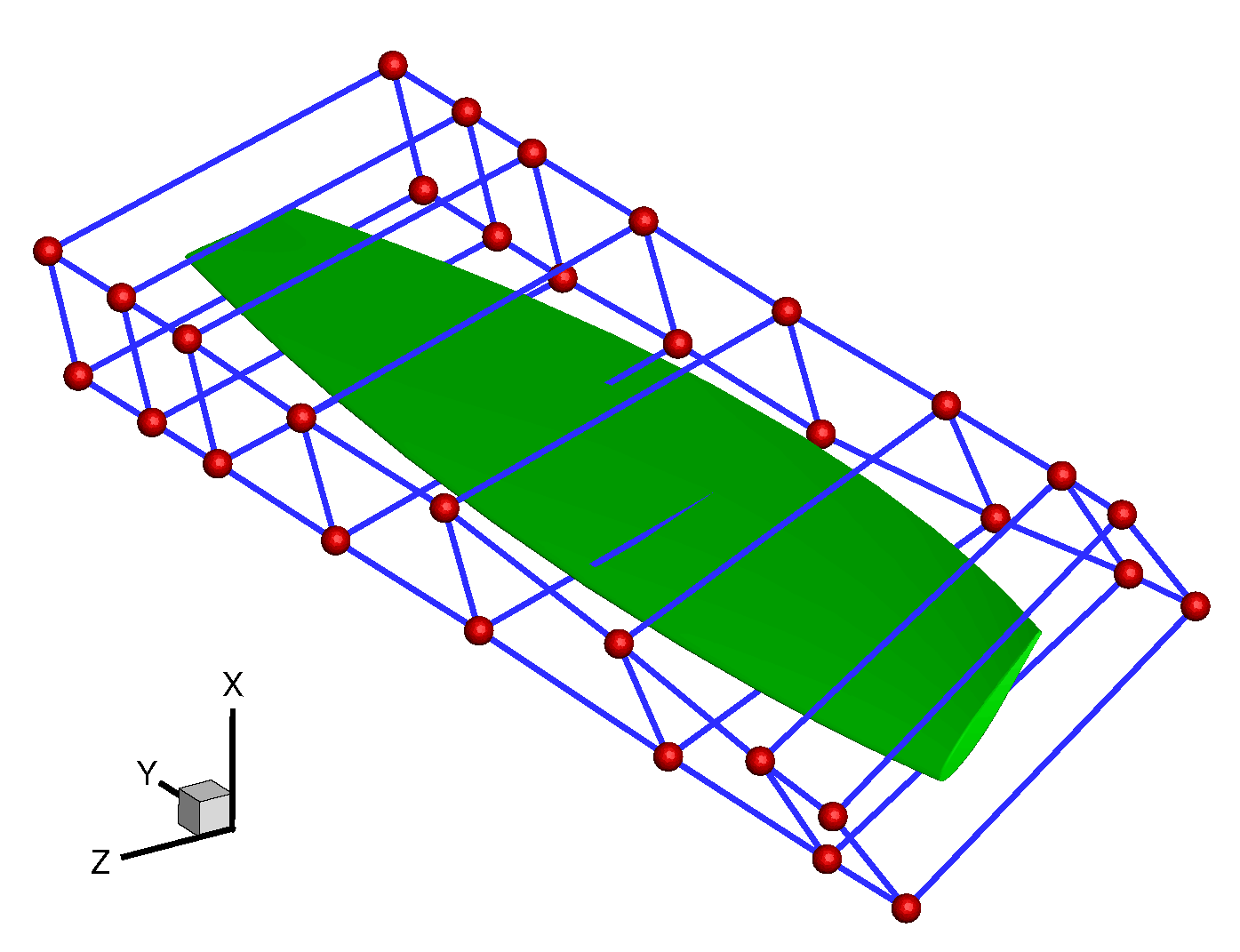
2.3. Shape and Mesh Deformation
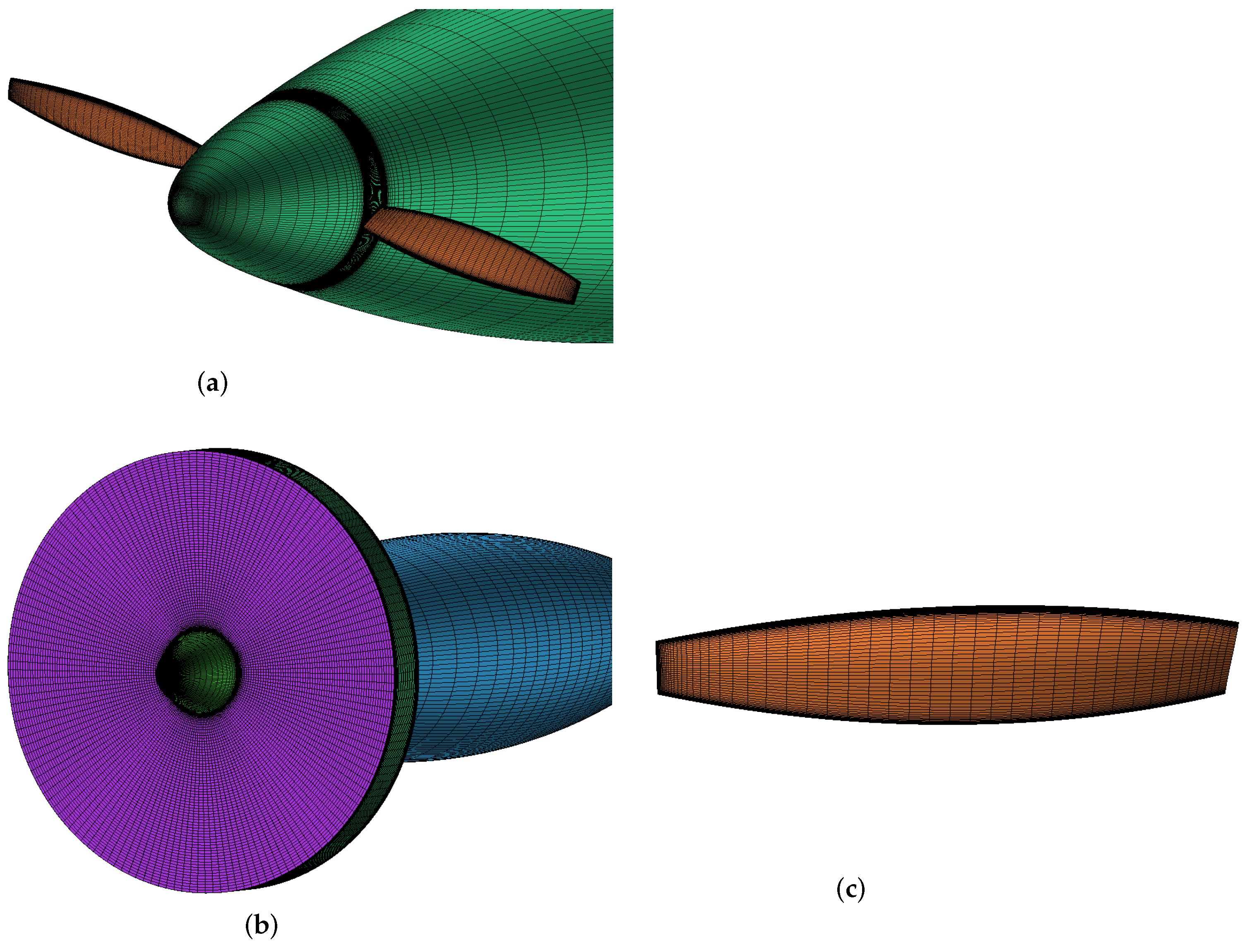
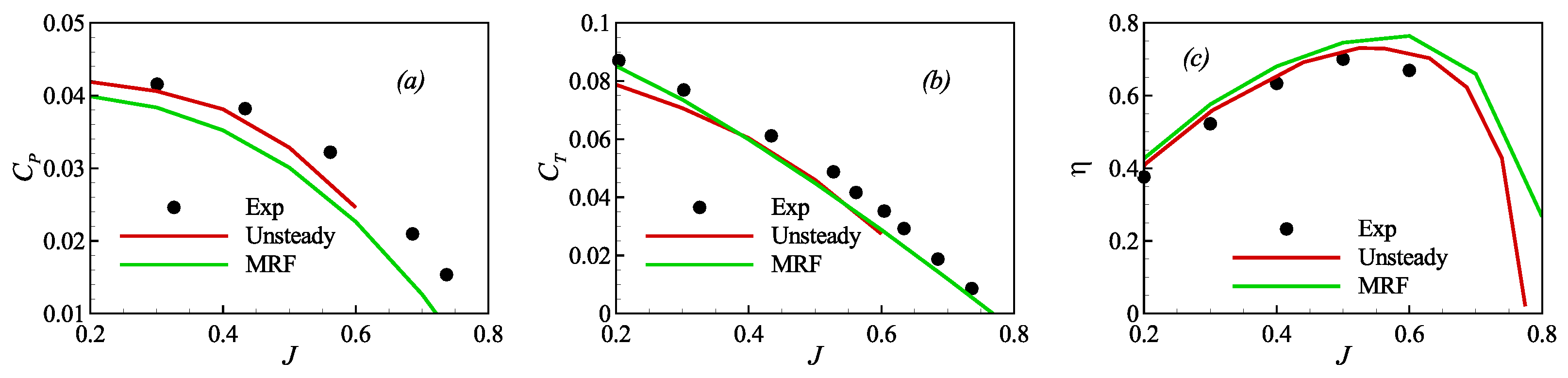
2.4. The MRF Approach
3. Flowfield Adjoint Equations
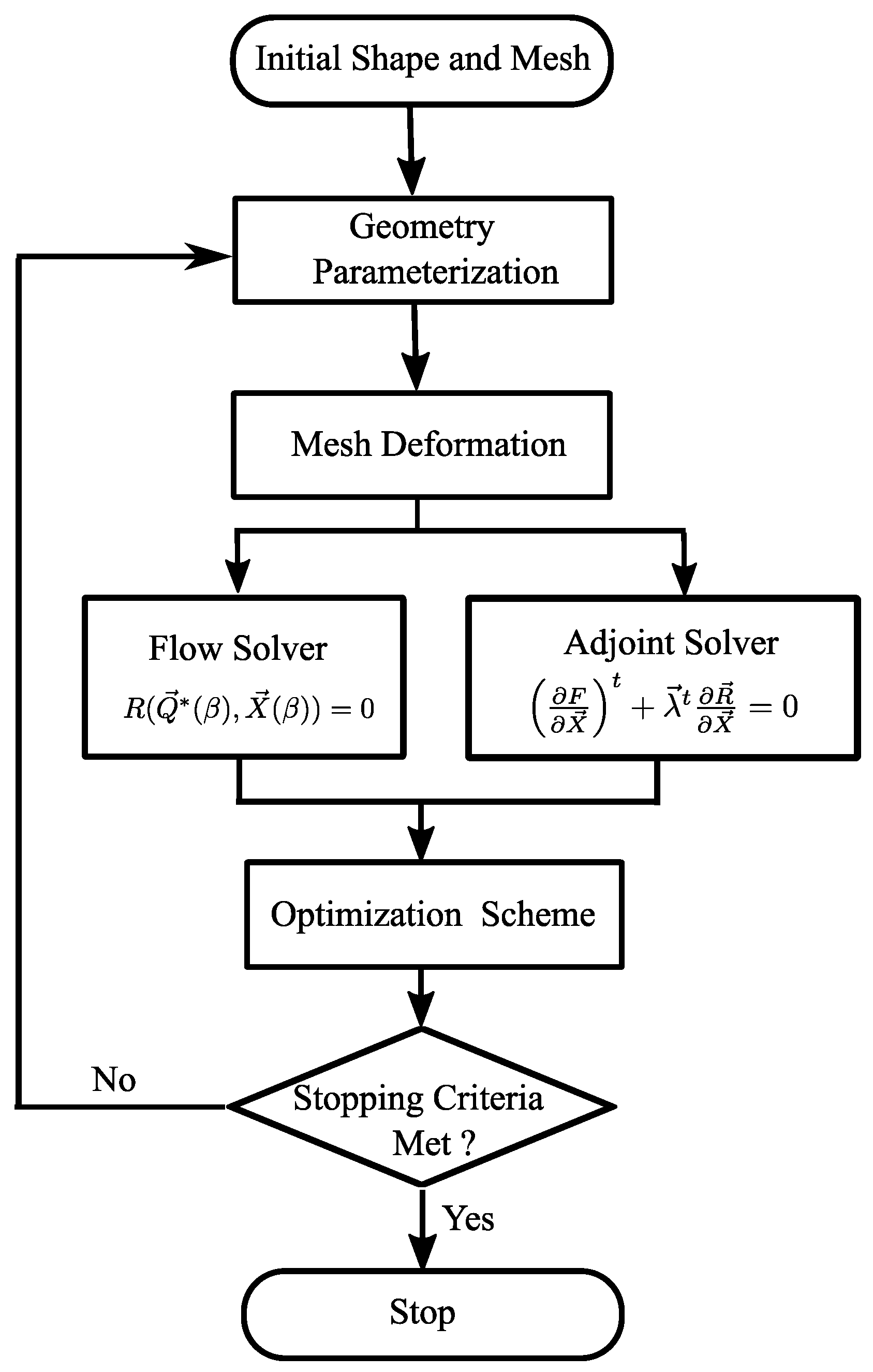
Optimization Scheme
4. Results and Discussion
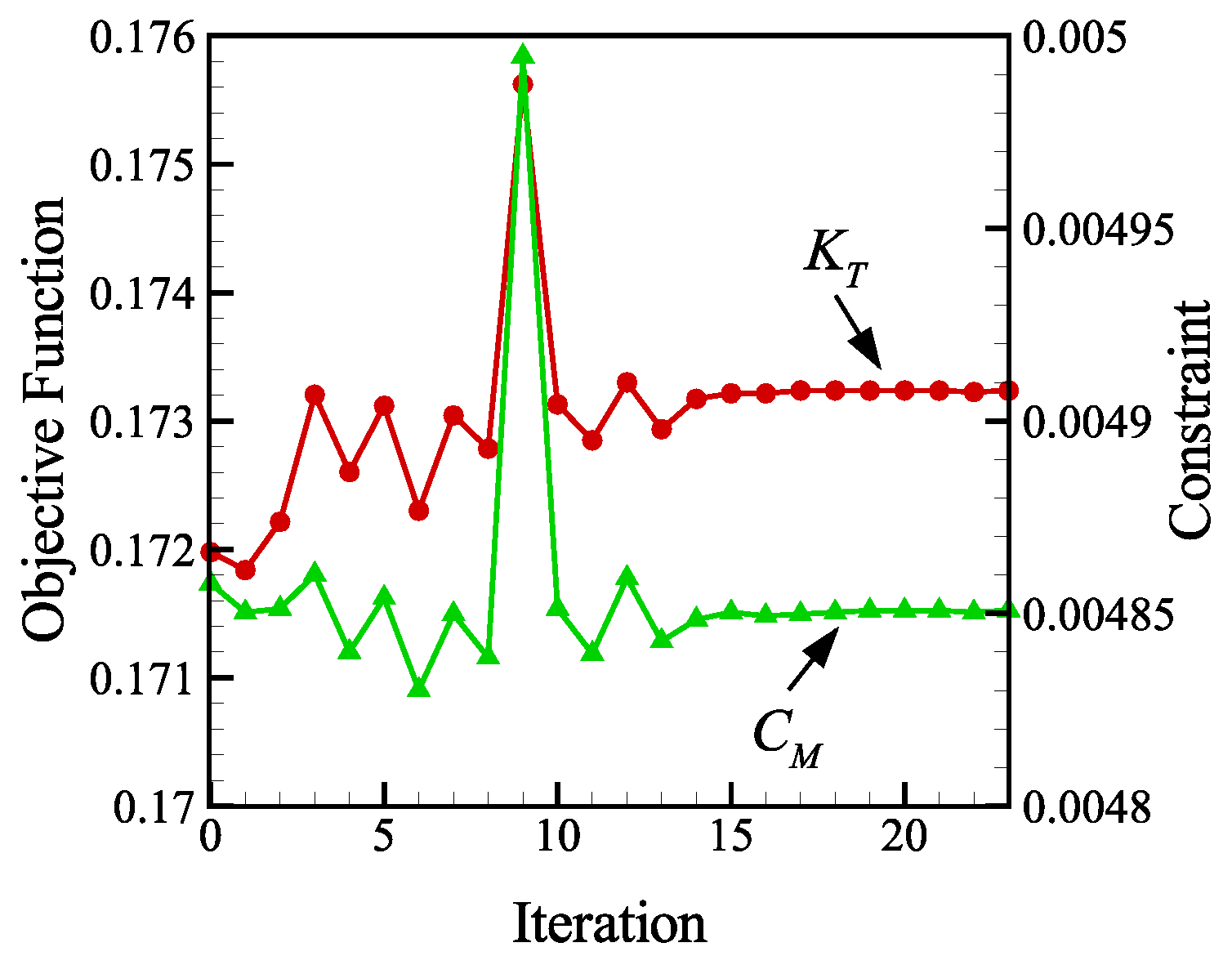
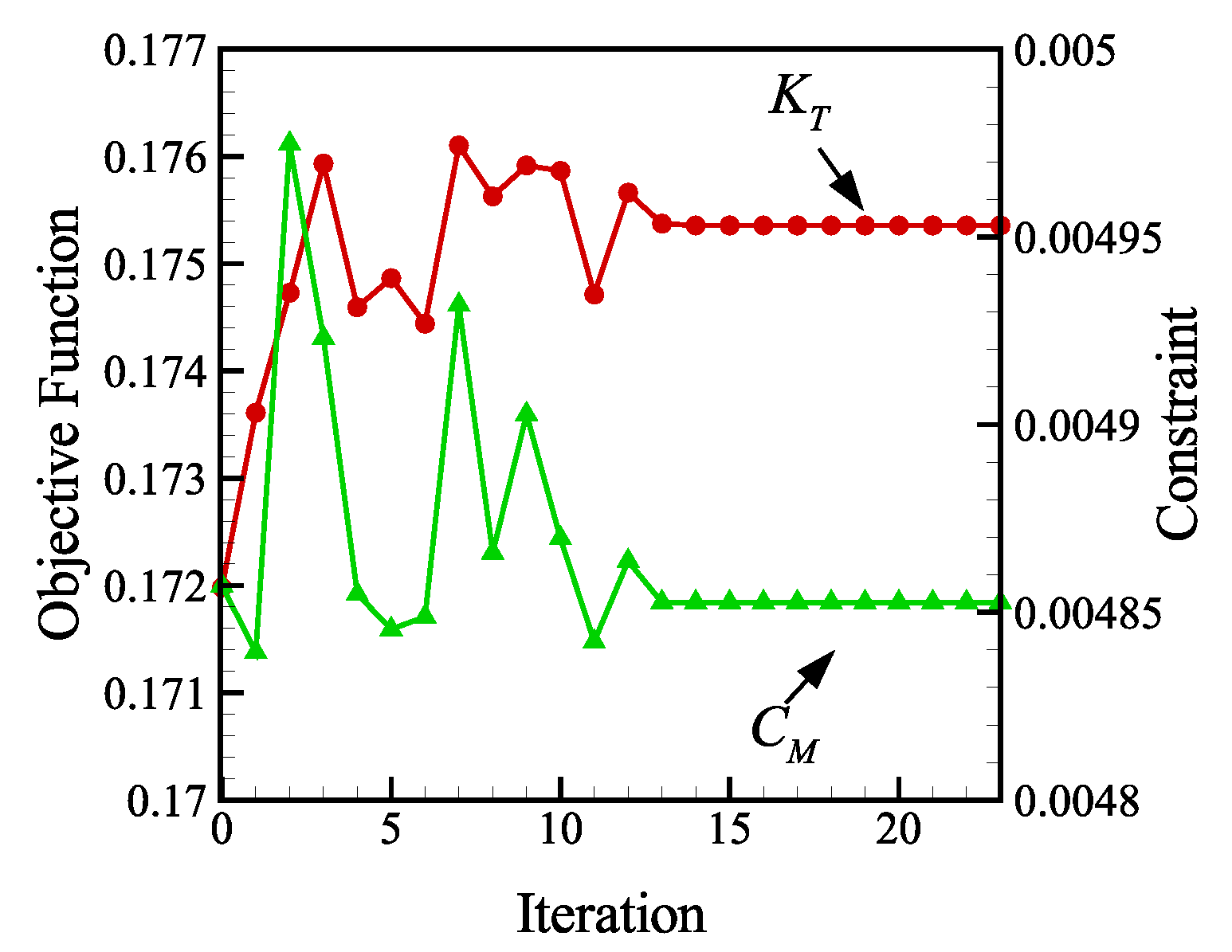
4.1. The Optimization of Twisted Angles Distribution
4.2. The Optimization of Chord Length Distribution
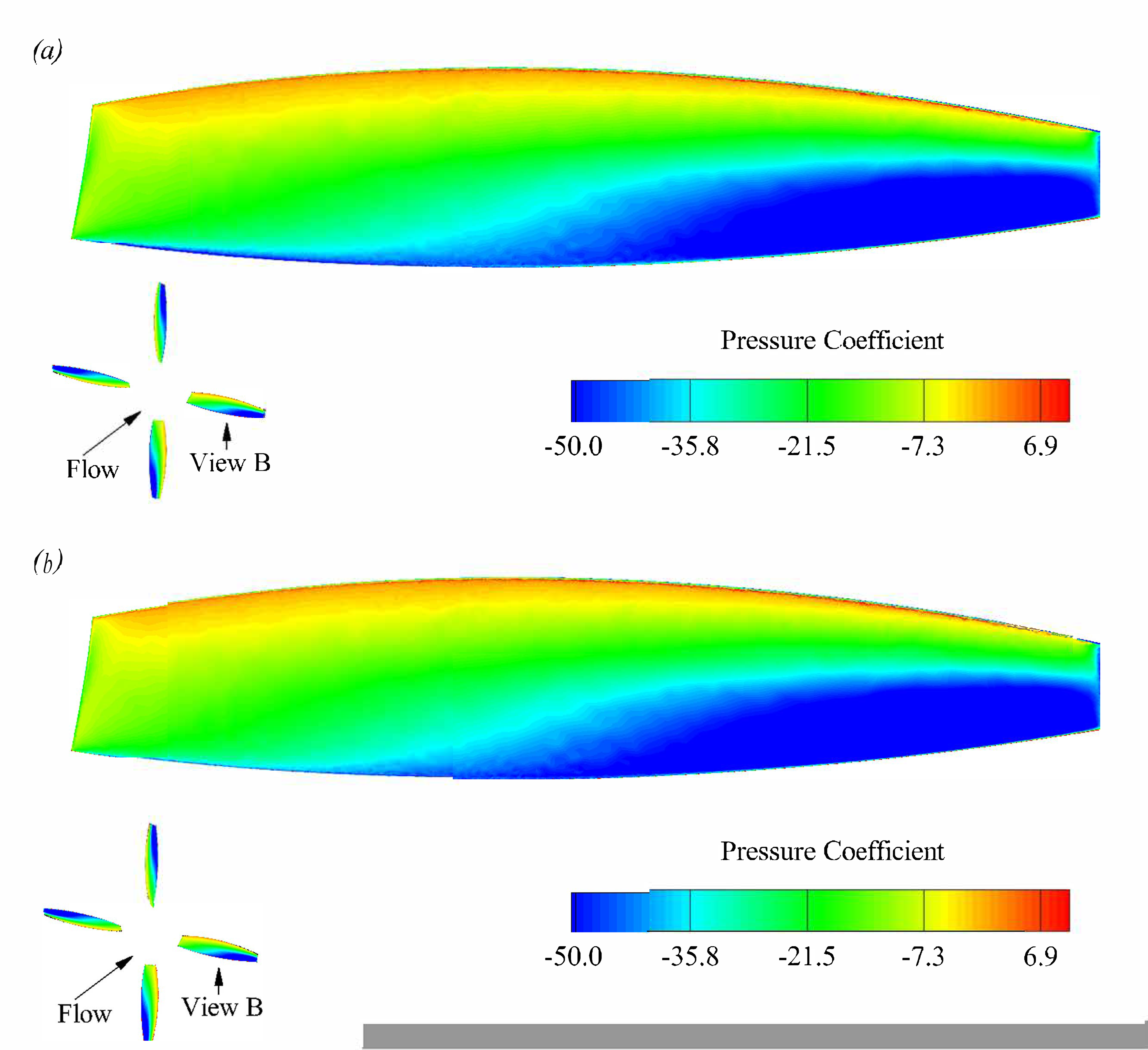
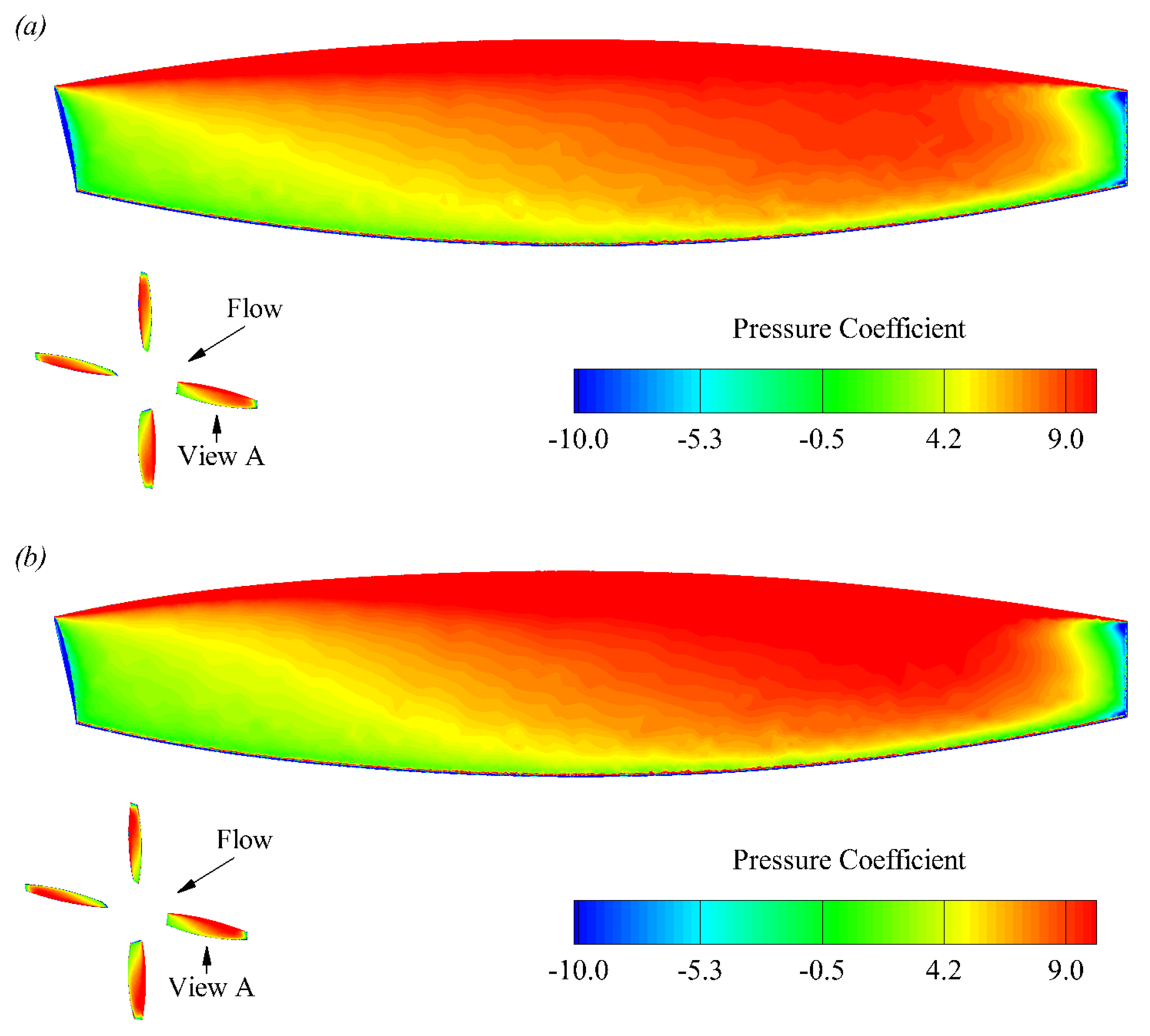
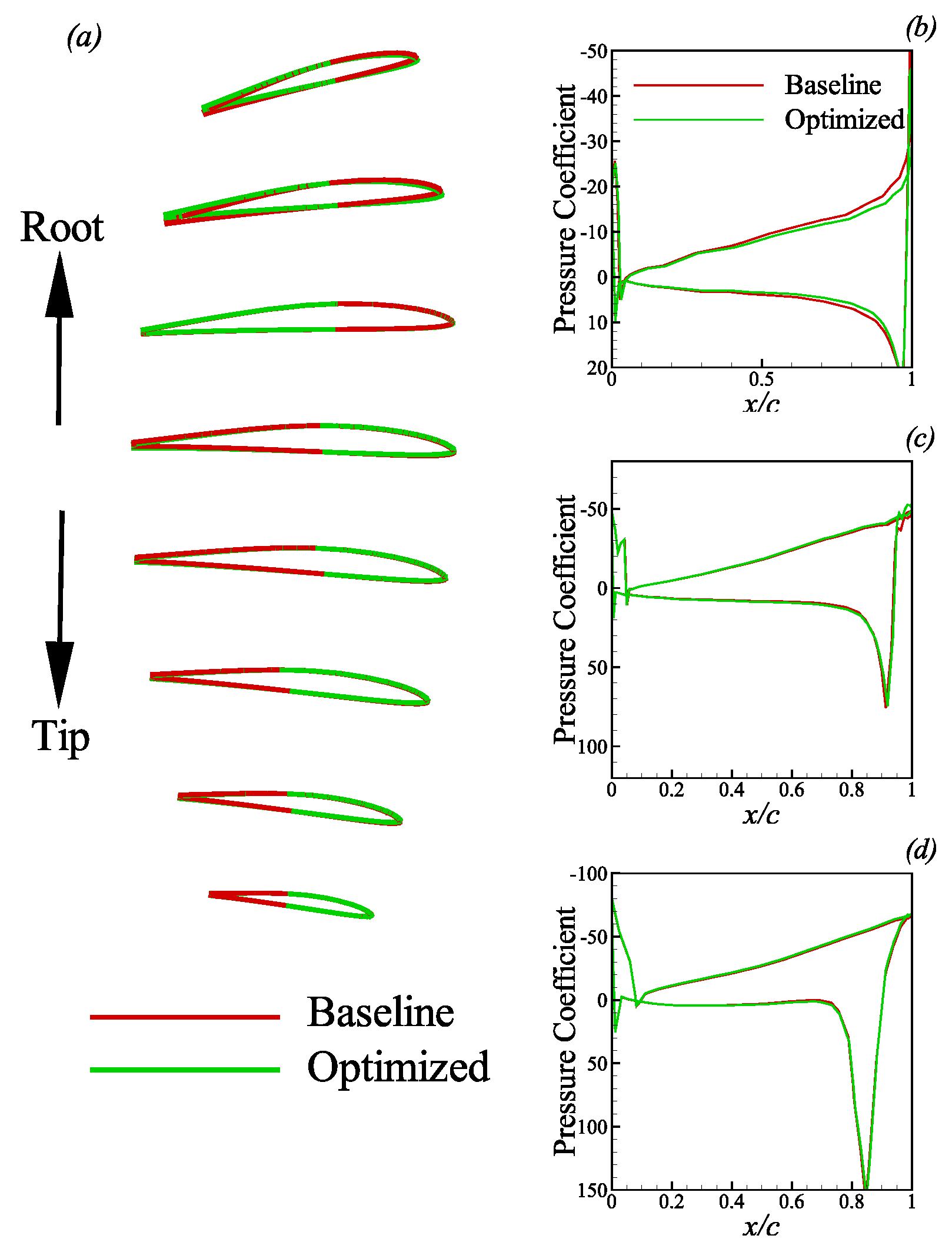
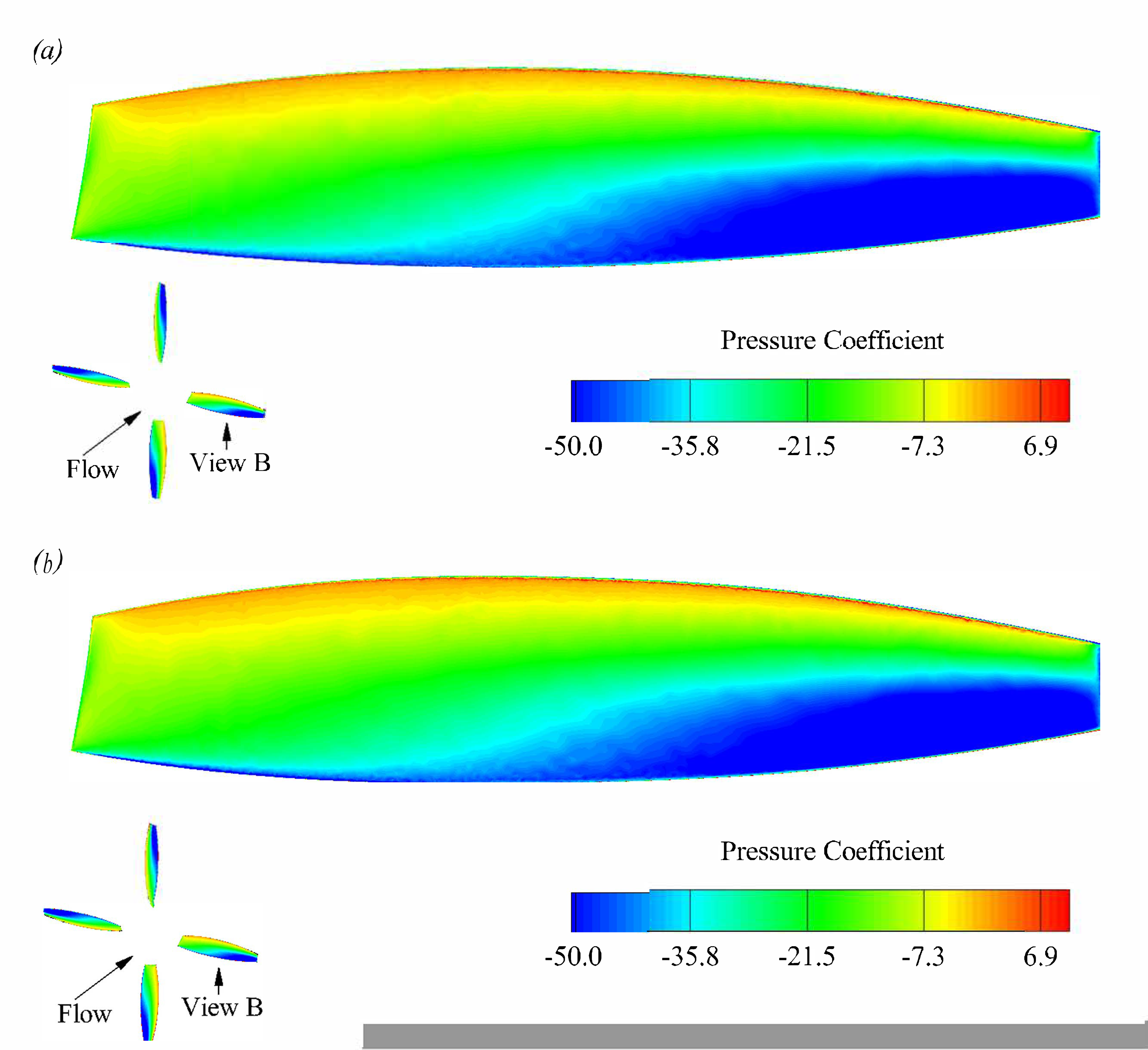
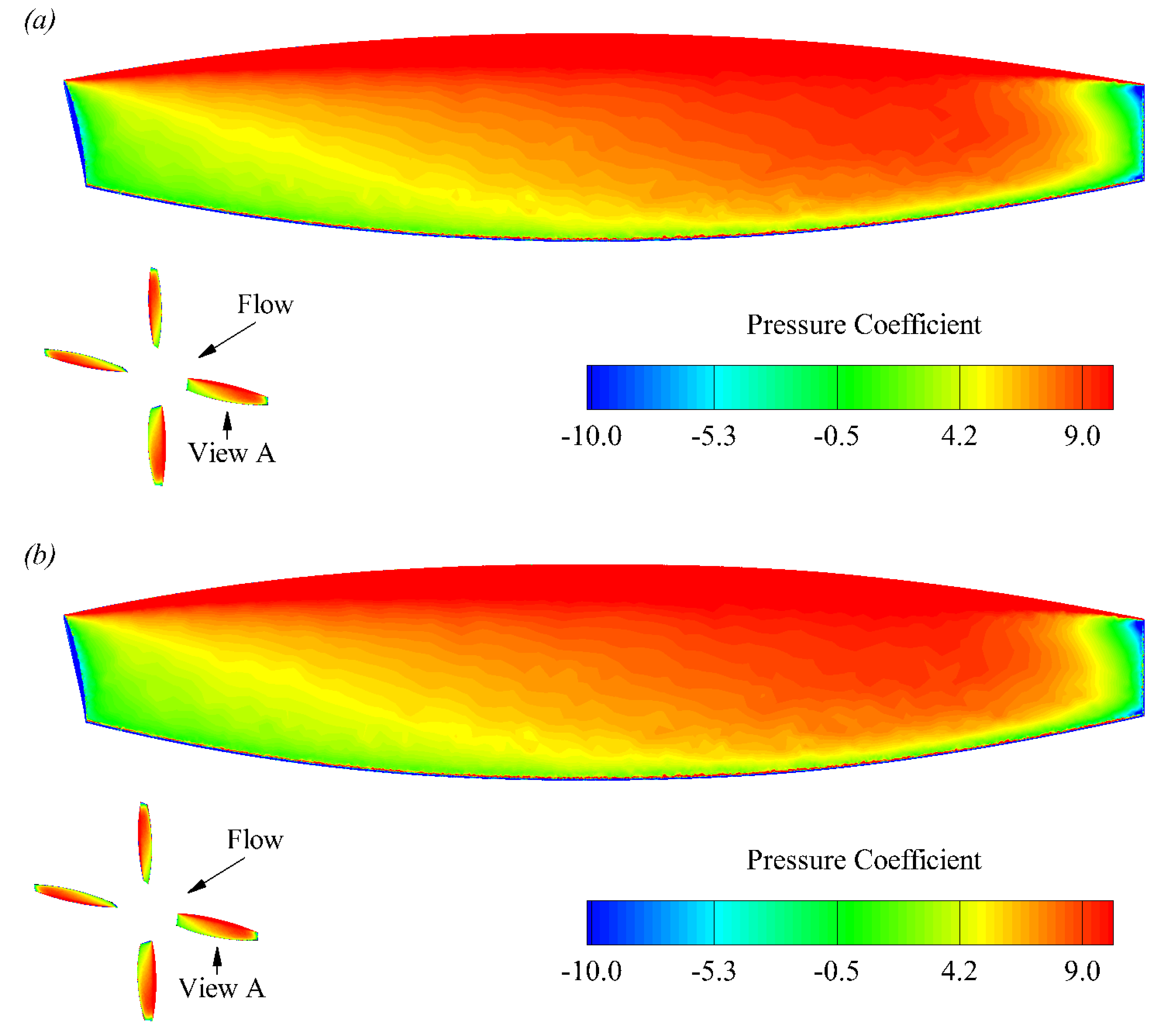
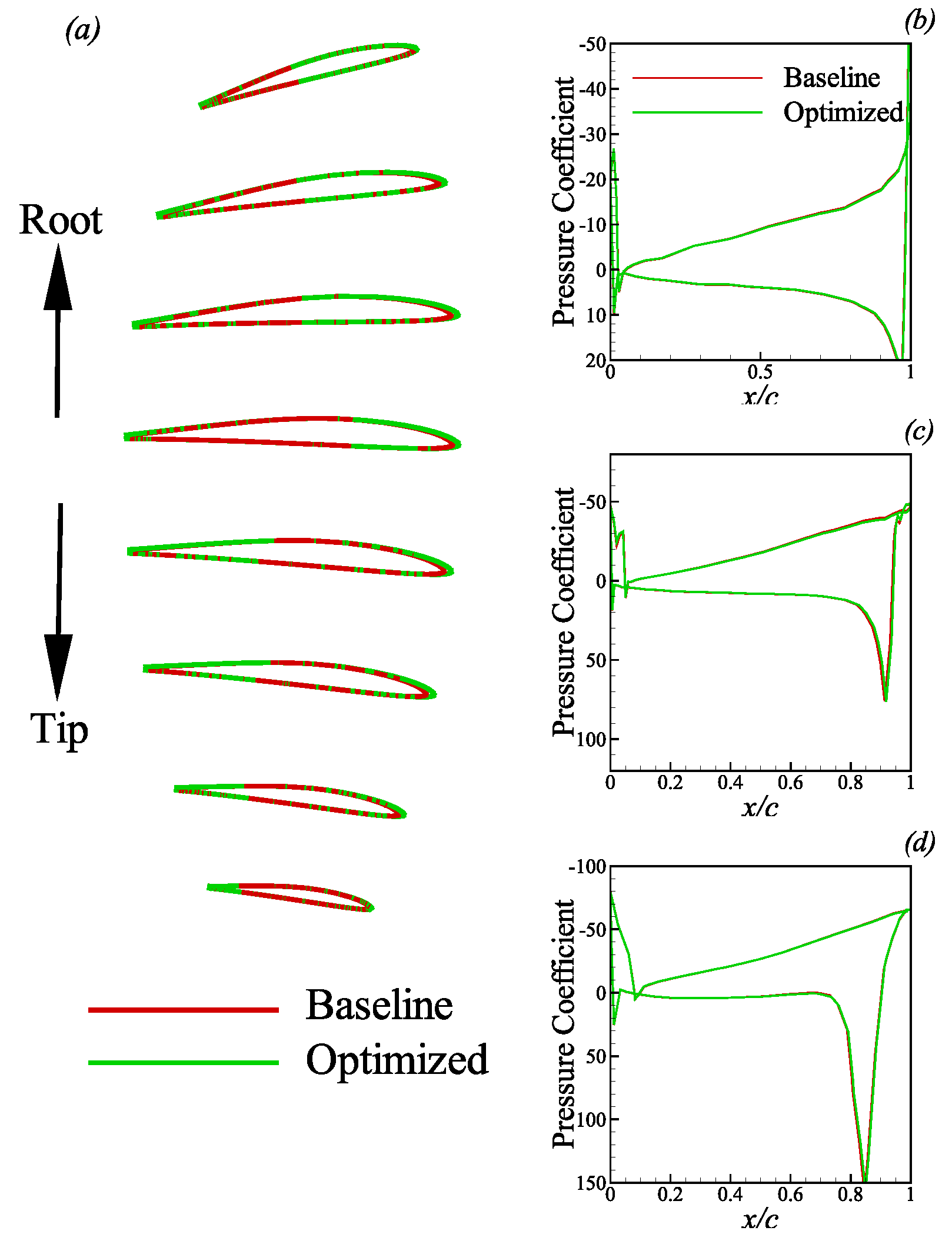
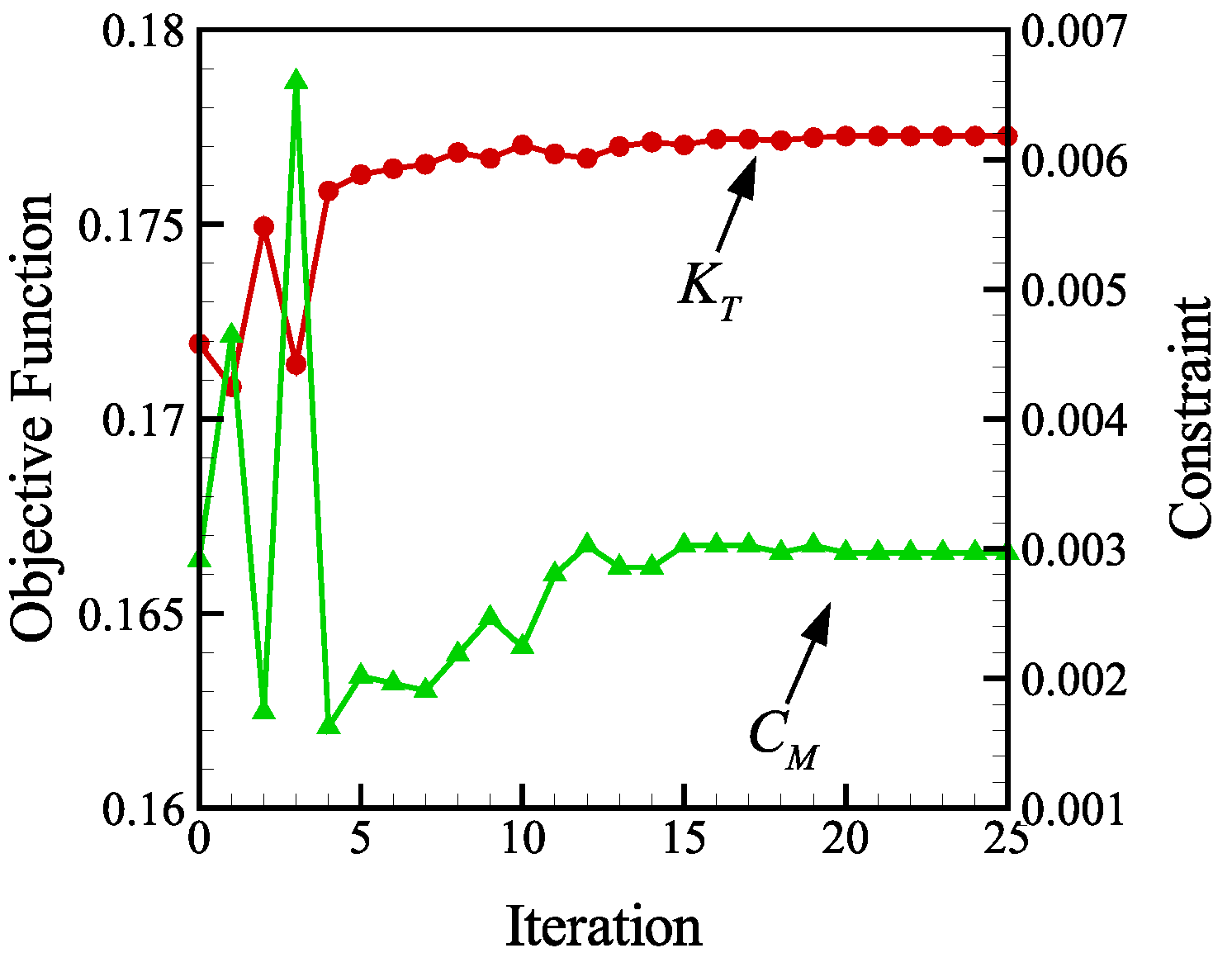
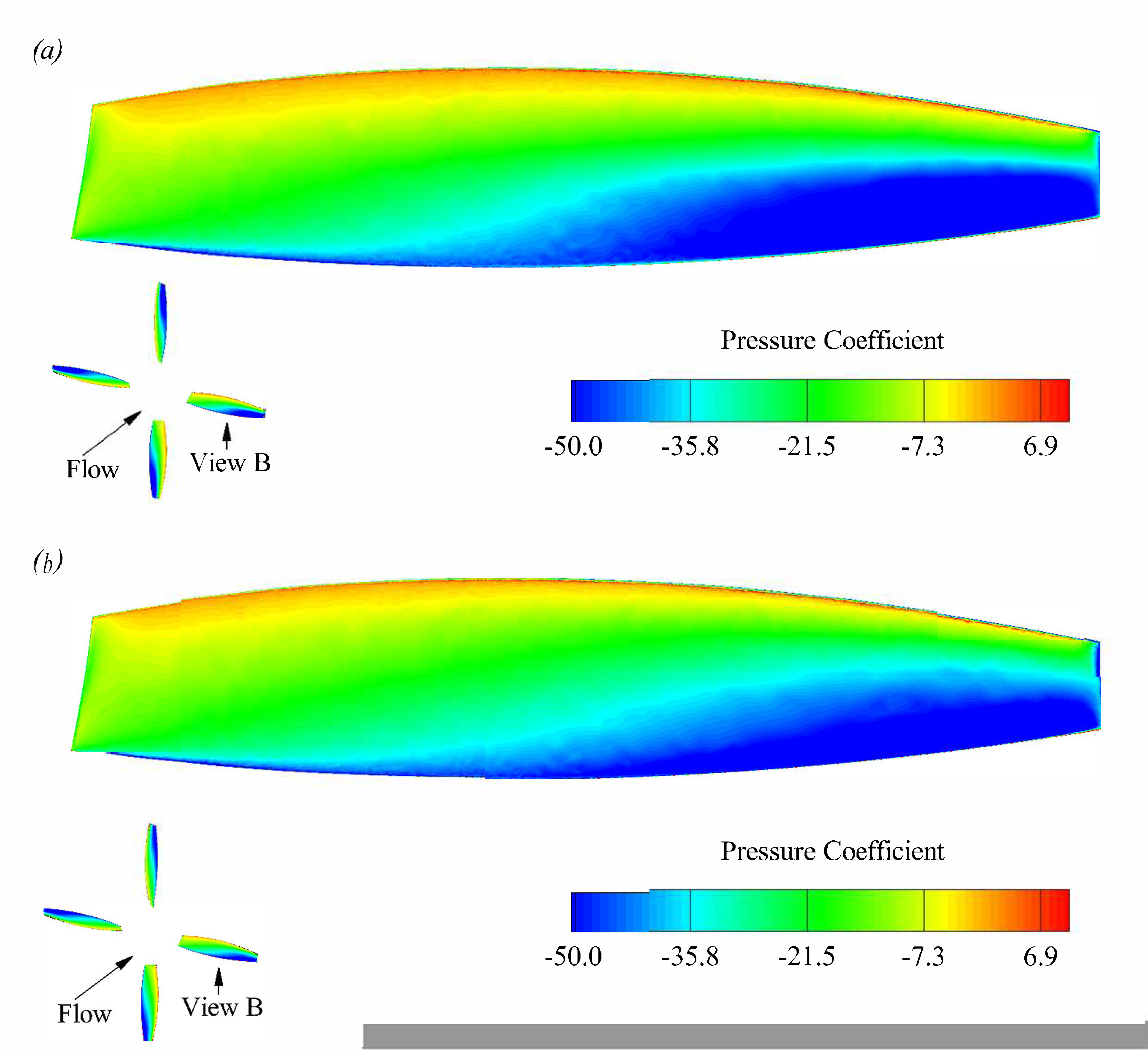
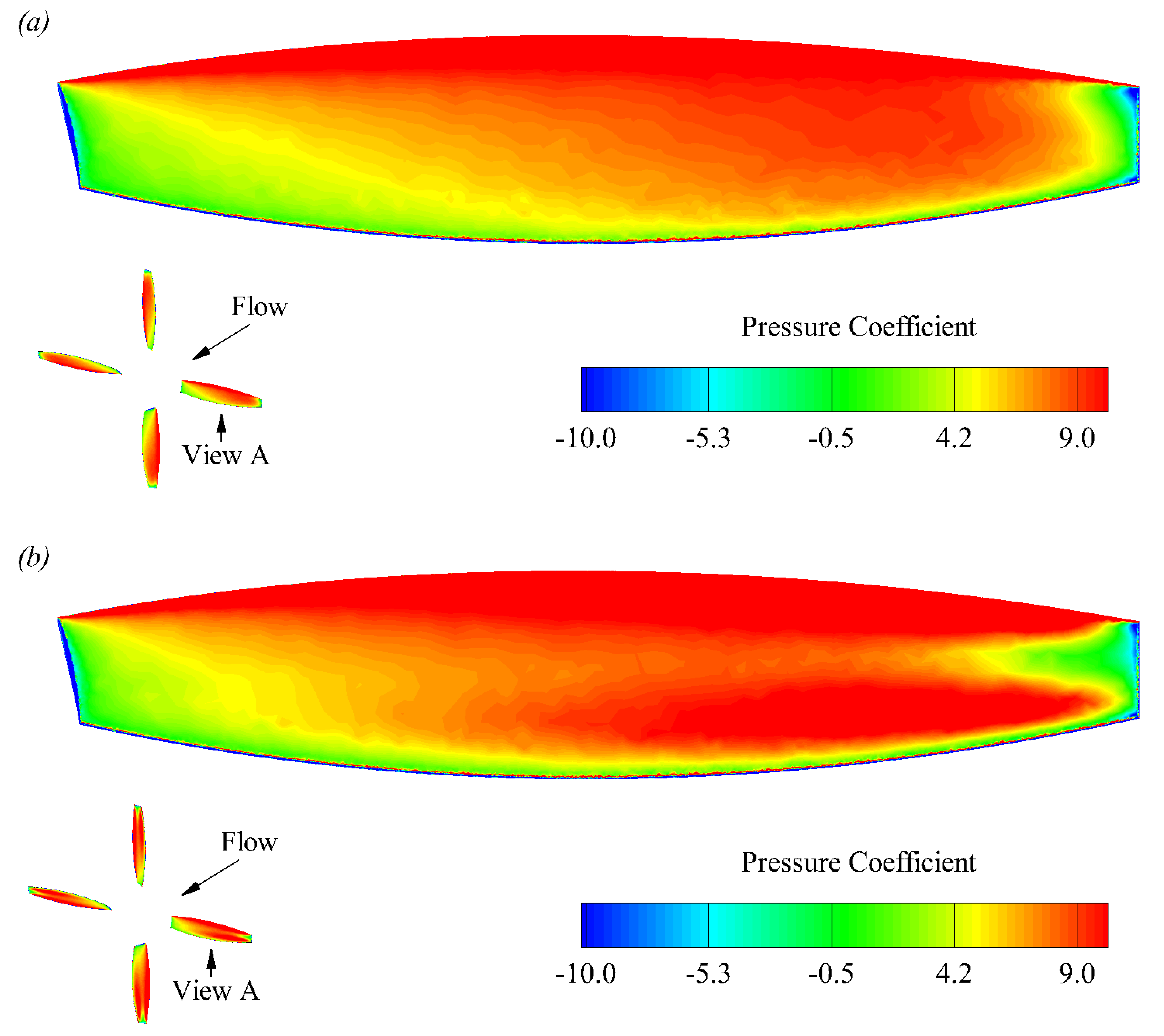
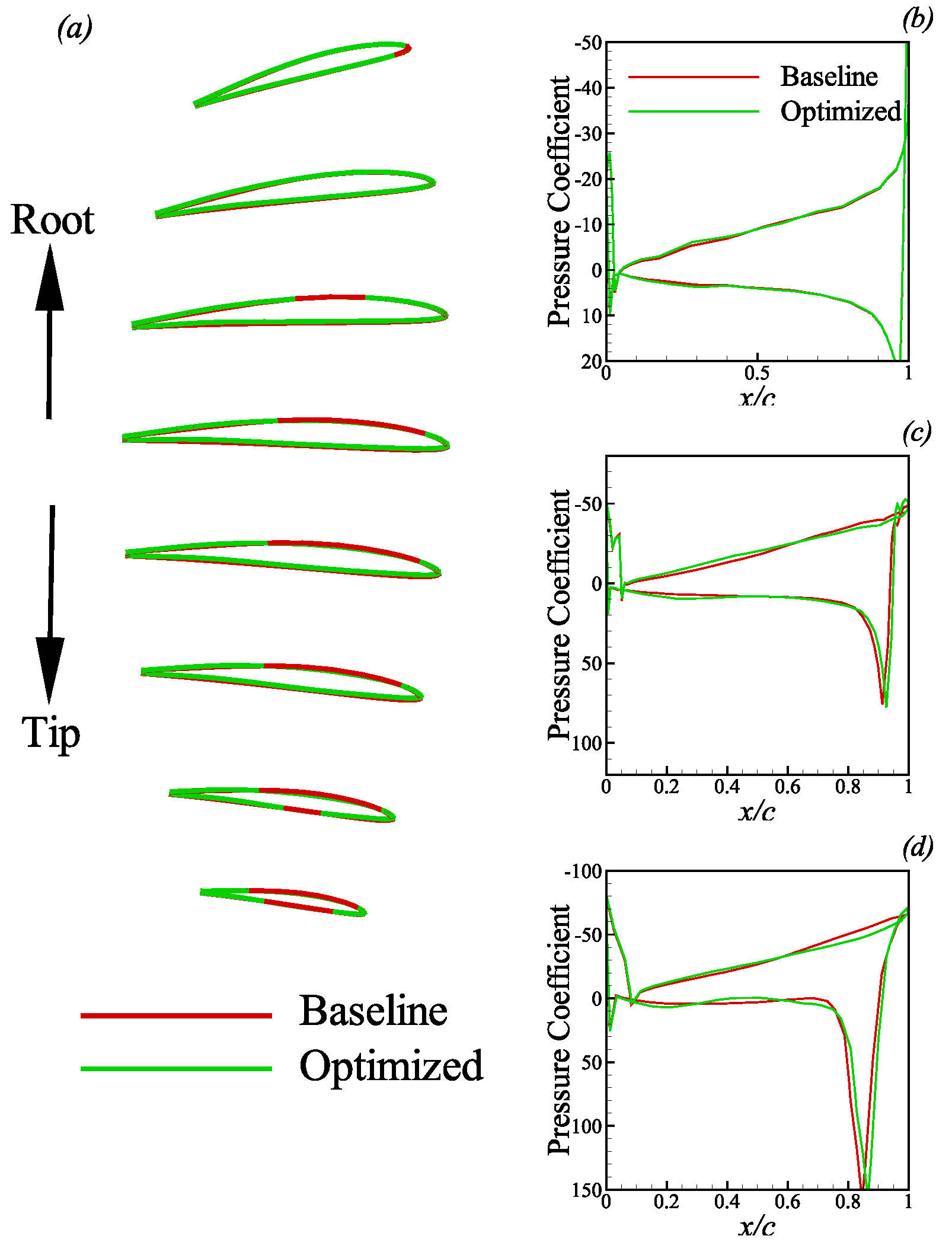
4.3. The Optimization of Profiles of Blade
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| MRF | Moving Reference Frame |
| CFD | Computational Fluid Dynamics |
References
- Wald, Q. The Wright Brothers propeller theory and design. In Proceedings of the 37th Joint Propulsion Conference and Exhibit, Salt Lake City, UT, USA, 8–11 July 2001; p. 3386. [Google Scholar]
- Hicks, R.M.; Murman, E.M.; Vanderplaats, G.N. An Assessment of Airfoil Design by Numerical Optimization; National Aeronautics and Space Administration: Washington, DC, USA, 1974.
- Vanderplaats, G.N.; Hicks, R.M.; Murman, E.M. Application of numerical optimization techniques to airfoil design. In Proceedings of the NASA Conference on Aerodynamic Analysis Requiring Advanced Computers, Hampton, VA, USA, 4–6 May 1975; pp. 749–768. [Google Scholar]
- Pironneau, O. Optimal shape design for elliptic systems. In System Modeling and Optimization; Springer: Berlin, Germany, 1982; pp. 42–66. [Google Scholar]
- Jameson, A.; Baker, T. Solution of the Euler equations for complex configurations. In Proceedings of the 6th Computational Fluid Dynamics Conference Danvers, Danvers, MA, USA, 13–15 July 1983; p. 1929. [Google Scholar]
- Jameson, A. Optimum aerodynamic design using CFD and control theory. In Proceedings of the 12th Computational Fluid Dynamics Conference, San Diego, CA, USA, 19–22 June 1995; p. 1729. [Google Scholar]
- Jameson, A.; Martinelli, L.; Pierce, N. Optimum aerodynamic design using the Navier–Stokes equations. Theor. Comput. Fluid Dyn. 1998, 10, 213–237. [Google Scholar] [CrossRef] [Green Version]
- Jameson, A.; Martinelli, L. Aerodynamic shape optimization techniques based on control theory. In Computational Mathematics Driven by Industrial Problems; Springer: Berlin, Germany, 2000; pp. 151–221. [Google Scholar]
- Lerbs, H.W. Moderately Loaded Propellers with a Finite Number of Blades and a Arbitrary Distribution of Circulations. Trans. Sname 1952, 60, 73–123. [Google Scholar]
- Kerwin, J.E. The Solution of Propeller Lifting Surface Problems by Vortex Lattice Methods; Technical Report; Massachusetts Institute of Technology Cambridge, Department of Naval Architecture and Marine: Cambridge, MA, USA, 1961. [Google Scholar]
- Morgan, W.B.; Silovic, V.; Denny, S.B. Propeller Lifting-Surface Corrections; Technical Report; Hydro-and Aerodynamics Lab Lyngby (Denmark) Hydrodynamics Section: Copenhagen, Denmark, 1968. [Google Scholar]
- Denny, S.B. Cavitation and Open-Water Performance Tests of a Series of Propellers Designed by Lifting-Surface Methods; Technical Report; David W. Taylor Naval Ship Research and Development Center Bethesda MD Department: Bethesda, MD, USA, 1968. [Google Scholar]
- Chausee, D. Computation of Three-Dimensional Flow through Prop Fans; NEAR TR-199; Nielsen Engineering and Research Inc.: Santa Clara, CA, USA, 1979. [Google Scholar]
- Hess, J.L.; Valarezo, W.O. Calculation of steady flow about propellers using a surface panel method. J. Propuls. Power 1985, 1, 470–476. [Google Scholar] [CrossRef]
- Hanson, D.B. Compressible lifting surface theory for propeller performance calculation. J. Aircr. 1985, 22, 19–27. [Google Scholar] [CrossRef]
- Xiang, S.; Qiang, L.Y.; Tong, G.; Zhao, P.W.; Tong, X.S.; Dong, L.Y. An improved propeller design method for the electric aircraft. Aerosp. Sci. Technol. 2018, 78, 488–493. [Google Scholar] [CrossRef]
- Alba, C.; Elham, A.; German, B.J.; Veldhuis, L.L. A surrogate-based multi-disciplinary design optimization framework modeling wing–propeller interaction. Aerosp. Sci. Technol. 2018, 78, 721–733. [Google Scholar] [CrossRef]
- Zheng, X.k.; Wang, X.l.; Cheng, Z.j.; Han, D. The efficiency analysis of high-altitude propeller based on vortex lattice lifting line theory. Aeronaut. J. 2017, 121, 141–162. [Google Scholar] [CrossRef]
- Allen, C.; Rendall, S.T.; Morris, A. Computational-fluid-dynamics-based twist optimization of hovering rotors. J. Aircr. 2010, 47, 2075–2085. [Google Scholar] [CrossRef]
- Dumont, A.; Le Pape, A.; Peter, J.; Huberson, S. Aerodynamic shape optimization of hovering rotors using a discrete adjoint of the Reynolds-Averaged Navier–Stokes Equations. J. Am. Helicopter Soc. 2011, 56, 1–11. [Google Scholar] [CrossRef]
- Allen, C.B.; Rendall, T.C. CFD-based optimization of hovering rotors using radial basis functions for shape parameterization and mesh deformation. Optim. Eng. 2013, 14, 97–118. [Google Scholar] [CrossRef]
- Farrokhfal, H.; Pishevar, A. Aerodynamic shape optimization of hovering rotor blades using a coupled free wake—CFD and adjoint method. Aerosp. Sci. Technol. 2013, 28, 21–30. [Google Scholar] [CrossRef]
- Dhert, T.; Ashuri, T.; Martins, J.R. Aerodynamic shape optimization of wind turbine blades using a Reynolds-averaged Navier–Stokes model and an adjoint method. Wind. Energy 2017, 20, 909–926. [Google Scholar] [CrossRef]
- Roe, P.L. Approximate Riemann solvers, parameter vectors, and difference schemes. J. Comput. Phys. 1981, 43, 357–372. [Google Scholar] [CrossRef]
- Colella, P. A direct Eulerian MUSCL scheme for gas dynamics. Siam J. Sci. Stat. Comput. 1985, 6, 104–117. [Google Scholar] [CrossRef] [Green Version]
- Venkatakrishnan, V. Convergence to steady state solutions of the Euler equations on unstructured grids with limiters. J. Comput. Phys. 1995, 118, 120–130. [Google Scholar] [CrossRef]
- Spalart, P.; Allmaras, S. A one-equation turbulence model for aerodynamic flows. In Proceedings of the 30th Aerospace Sciences Meeting and Exhibit, Reno, NV, USA, 6–9 January 1992; p. 439. [Google Scholar]
- Nielsen, E.J.; Lu, J.; Park, M.A.; Darmofal, D.L. An implicit, exact dual adjoint solution method for turbulent flows on unstructured grids. Comput. Fluids 2004, 33, 1131–1155. [Google Scholar] [CrossRef]
- Rumsey, C.L.; Rivers, S.M.; Morrison, J.H. Study of CFD variation on transport configurations from the second drag-prediction workshop. Comput. Fluids 2005, 34, 785–816. [Google Scholar] [CrossRef]
- Samareh, J.A. Novel multidisciplinary shape parameterization approach. J. Aircr. 2001, 38, 1015–1024. [Google Scholar] [CrossRef]
- Saad, Y.; Schultz, M.H. GMRES: A generalized minimal residual algorithm for solving nonsymmetric linear systems. Siam J. Sci. Stat. Comput. 1986, 7, 856–869. [Google Scholar] [CrossRef] [Green Version]
- Ghoddoussi, A. A more Comprehensive Database for Propeller Performance Validations at Low Reynolds Numbers. Ph.D. Thesis, Wichita State University, Wichita, KS, USA, 2016. [Google Scholar]
- Mavriplis, D.J. Discrete adjoint-based approach for optimization problems on three-dimensional unstructured meshes. AIAA J. 2007, 45, 741–750. [Google Scholar] [CrossRef] [Green Version]
- Boggs, P.T.; Tolle, J.W. Sequential quadratic programming. Acta Numer. 1995, 4, 1–51. [Google Scholar] [CrossRef]




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Mesh | Total Nodes | Angle of Attack | ||||
|---|---|---|---|---|---|---|
| Coarse | 1,119,145 | 0.055 | 0.5 | 0.032030 | 0.01875351 | 0.01327652 |
| Medium | 3,092,999 | 0.250 | 0.5 | 0.030676 | 0.01751588 | 0.01316048 |
| Fine | 6,829,375 | 0.450 | 0.5 | 0.030363 | 0.01733237 | 0.01303149 |
| Exp | \ | 0.520 | 0.5 | 0.0295 | \ | \ |
| Baseline | 0.17197 | 0.00486 | 0.50685 |
| Optimized | 0.17324 | 0.00485 | 0.51165 |
| Increment | 0.74% | −0.21% | 0.95% |
| Baseline | 0.17197 | 0.00486 | 0.50685 |
| Optimized | 0.17536 | 0.00485 | 0.51791 |
| Increment | 1.97% | −0.21% | 2.18% |
| Baseline | 0.17197 | 0.00486 | 0.50685 |
| Optimized | 0.17725 | 0.00485 | 0.52349 |
| Increment | 3.07% | −0.21% | 3.28% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, Y.; Fu, Y.; Wang, P.; Chang, M. Aerodynamic Configuration Optimization of a Propeller Using Reynolds-Averaged Navier–Stokes and Adjoint Method. Energies 2022, 15, 8588. https://doi.org/10.3390/en15228588
Zhang Y, Fu Y, Wang P, Chang M. Aerodynamic Configuration Optimization of a Propeller Using Reynolds-Averaged Navier–Stokes and Adjoint Method. Energies. 2022; 15(22):8588. https://doi.org/10.3390/en15228588
Chicago/Turabian StyleZhang, Yang, Yifan Fu, Peng Wang, and Min Chang. 2022. "Aerodynamic Configuration Optimization of a Propeller Using Reynolds-Averaged Navier–Stokes and Adjoint Method" Energies 15, no. 22: 8588. https://doi.org/10.3390/en15228588