1. Introduction
Electric vertical takeoff and landing vehicles, which are mainly used for urban short-distance passenger or cargo transportation and can effectively reduce traffic time and carbon emissions, have been rapidly developing in recent years. Due to their advantages over conventional rotorcraft, such as the simplicity of the drivetrain system, low acoustic noise, and safe operation in modern urban environments, multi-rotor electric vertical takeoff and landing (eVTOL) vehicles are generally more suitable than eVTOL with tiltwings and tiltrotors [
1,
2]. Currently, designers choose coaxial rotors over conventional rotors for eVTOL vehicles because the coaxial rotors not only have a high hover aerodynamic efficiency but also produce less noise during flight [
3,
4]. As fixed-wing aircraft, their flow field is relatively simple and its wake structure is stable [
5,
6]. However, the flow field of a coaxial rotor is often complex. The lower rotor is impacted directly under the effect of the upper rotor’s wake. Therefore, the wakes of the upper and lower rotors interact actively, which has a negative impact on the performance of coaxial rotors [
7,
8]. Due to the relative position of the two rotors, the blade–vortex interaction (BVI) phenomena may arise when the blade-tip vortex generated by the upper rotor interacts with the blade of the lower rotor, which may relate to the noise problem of coaxial rotors [
3,
9,
10].
Researchers have carried out extensive studies on coaxial rotors. Harrington [
11] presented several experiments and obtained the thrust performance of multiple full-scale coaxial rotors in hover. Landgrebe [
12] investigated the performance and wake structure of a coaxial rotor. Ramasam [
13] investigated the hover performance of a small-sized coaxial rotor, comparing single, tandem, and tilt-rotor designs. Leishman [
14] developed the blade element momentum theory (BEMT), which is used to calculate the aerodynamic properties of coaxial rotor systems. Brown and Kim [
15] created a vorticity transport model (VTM) and compared the hover and forward flight characteristics of a coaxial rotor with those of an equivalent single rotor. Tan and Sun [
16] used the vortex particle method (VPM) combined with an unsteady panel technique to simulate the complex wake structure of a coaxial rotor in forward flight condition.
In recent years, computational fluid dynamics (CFD) technology has been widely used to investigate the flow field’s specifics in coaxial systems. Lakshminaryan and Baeder [
17] investigated the aerodynamic performance and wake structure of the Harington coaxial rotor using the RANS solver in conjunction with the sliding mesh approach. Jeongwoo Ko [
18] studied the wake dynamics of a coaxial rotor using a high-wake-resolution method combined with a truncated vortex tube model and a wave-number-extend finite-volume interpolation scheme to accurately capture flow field features such as the wake trajectory, blade–vortex interaction phenomenon, and wake instability phenomenon. Qi and Xu [
19] created a numerical method based on the RANS equation and the moving overset mesh technique to simulate the aerodynamics of a Harrington coaxial rotor and found that the fluctuation feature of thrust can be explained by the “induction effect” and “overlap effect” caused by the interaction of wakes and bound vortexes of the coaxial rotor.
However, most of the work has focused on the study of unsteady aerodynamic characteristics of coaxial rotors. Although collision of circular vortex rings has been the subject of many systematic experimental and numerical investigations [
20,
21,
22], the study of BVI on coaxial rotors is quite inadequate at present. The BVI phenomenon occurs as the vortex approaches the blade, influencing the distribution of aerodynamic load on the blade and causing partial load pulsation. The load pulsation will lead to serious vibration and noise from rotors, which is not favorable to the safety and comfort of flight. So, it is necessary to study the effects of some common parameters used in design on the BVI phenomena.
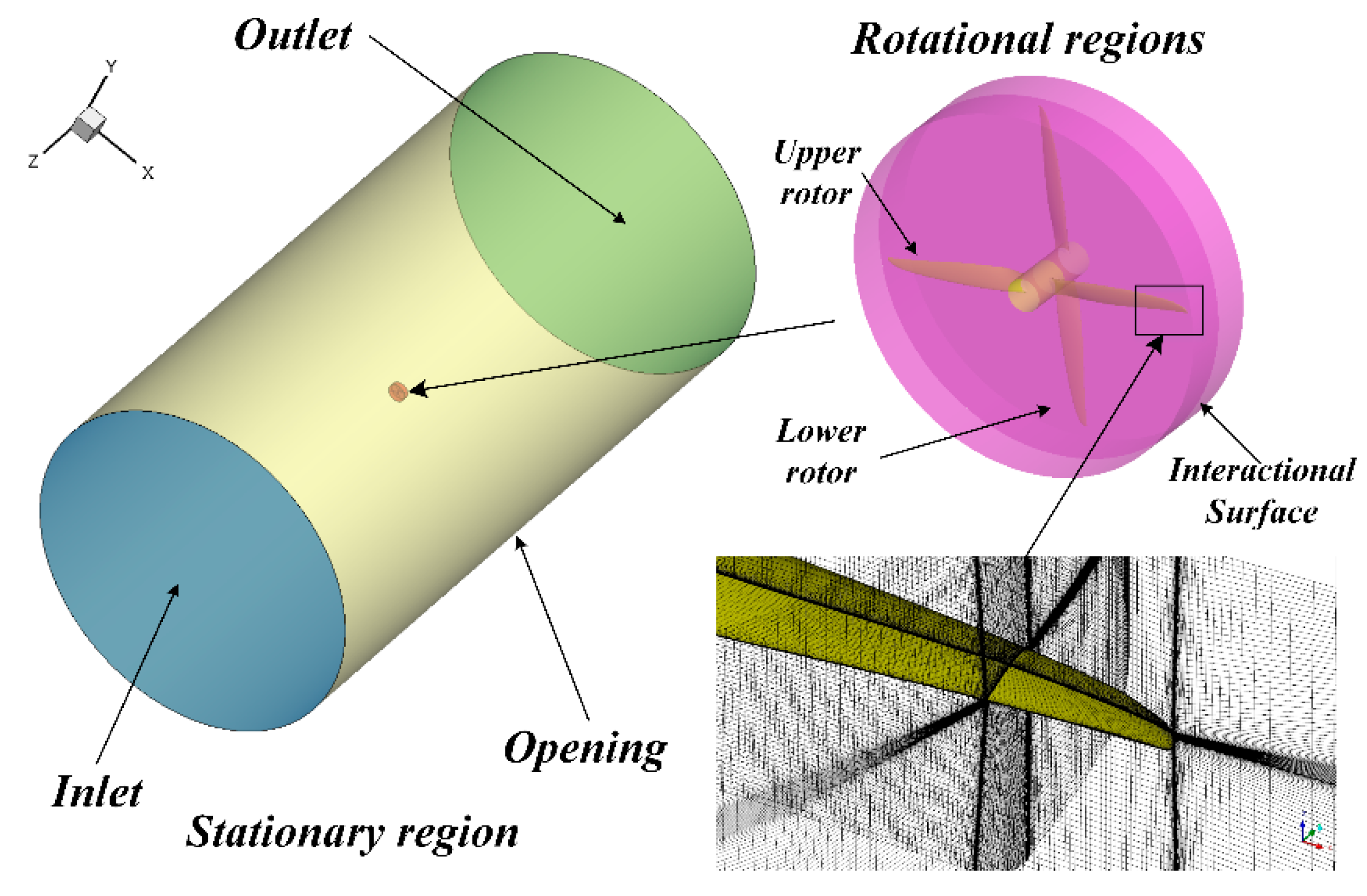
In this paper, the rotational motion of a coaxial rotor is simulated in different cases using a computational fluid dynamics (CFD) solver based on the unsteady Reynolds Average Navier–Stokes (uRANS) equation, which is verified by experiments. By analyzing the thrust coefficient distribution, position of the tip-vortex core and axial velocity of induced flow, the influence of azimuth gap, rotational speed and rotor spacing between two rotors on the BVI is analyzed and discussed.
3. Results and Discussion
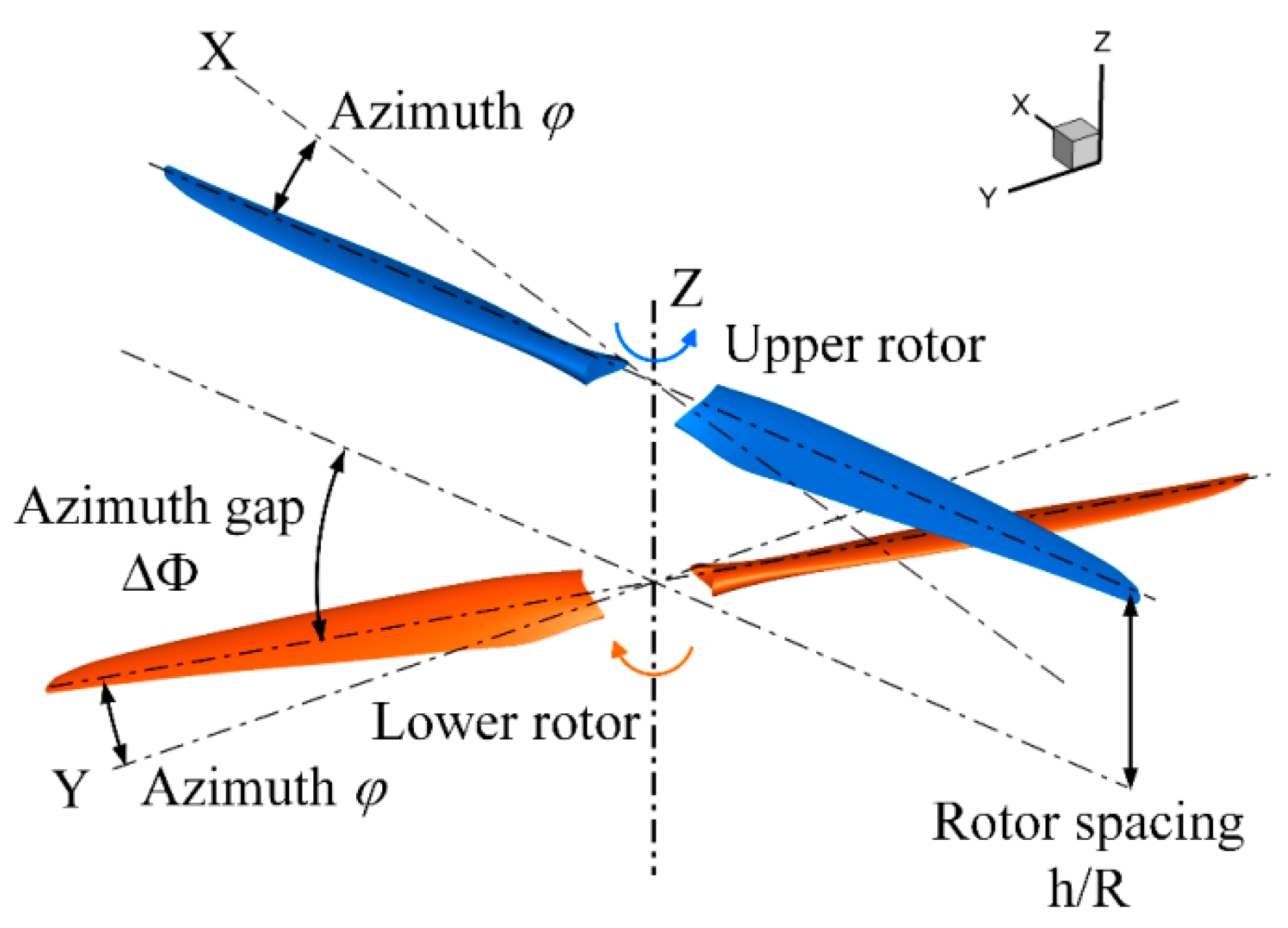
When viewed from above, in this research, each rotor in the coaxial rotor system had the same collective pitch, blade profile, and rotational speed but the upper rotor rotated anticlockwise and the lower rotor rotated clockwise. The origin of the global coordinate system was set at the hub center of the upper rotor. The
z-axis coincided with the rotor shaft and headed up. The azimuth angles of the upper and lower rotors were measured in their respective directions of rotation. The pitch axes of upper blades were parallel to the
x-axis at 0 degrees azimuth, and the pitch axes of lower blades were parallel to the
y-axis.
Figure 5 is a sketch map of the coaxial system’s blade locations.
3.1. Effect of Azimuth Gap
Blade–vortex interaction (BVI) appears when the tip vortex of the upper rotor is close to the blade of the lower rotor. In this section, several examples are discussed to describe the entire process in which the blades of the lower rotor pass through the wake of the upper rotor to research the effect of azimuth gap on the BVI. In this section, the rotor spacing between two rotors is maintained as h/R = 0.438 and the tip-Mach number is 0.517.
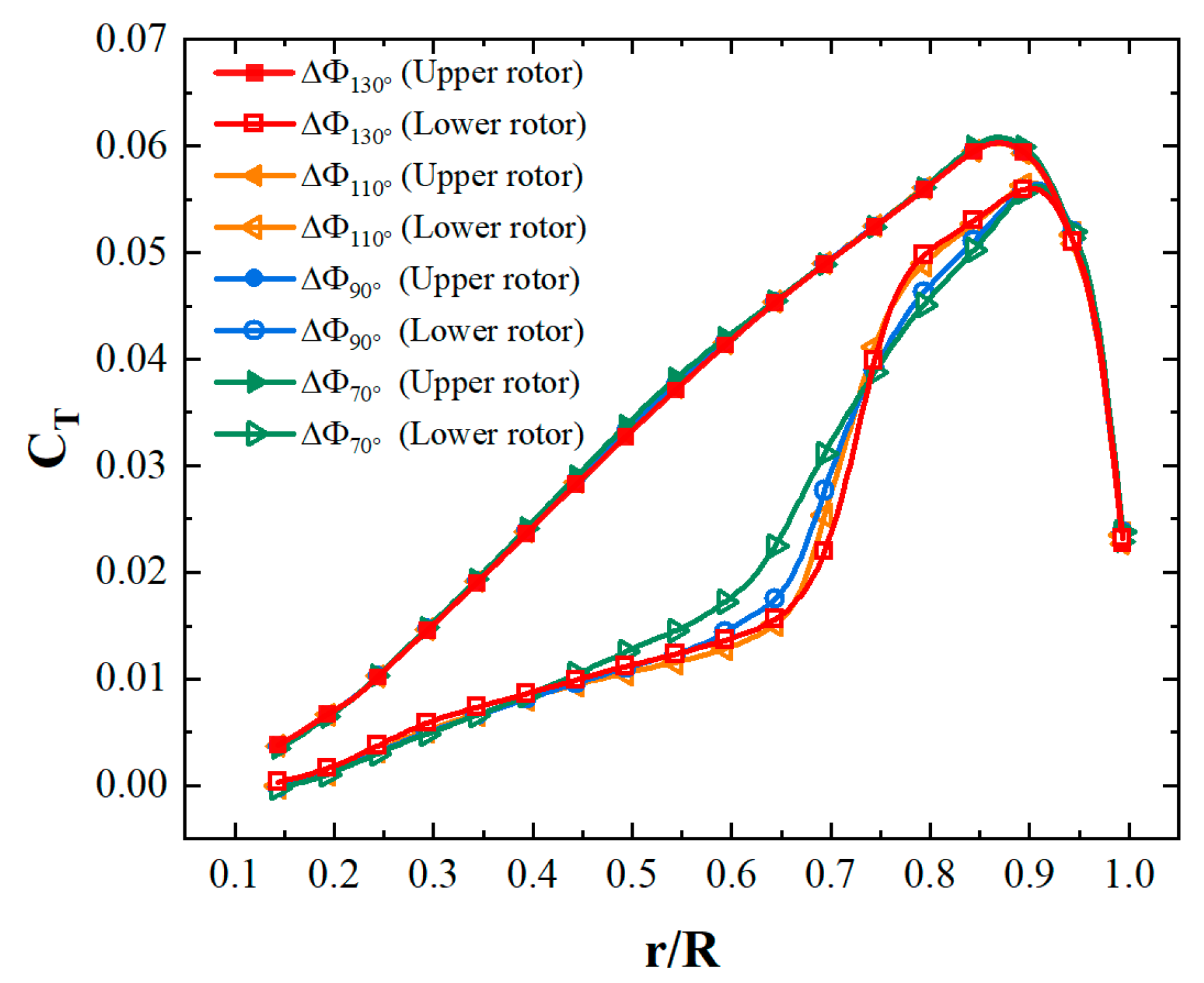
Figure 6 displays the variation in the spanwise distribution of thrust coefficient for each rotor at different azimuths. The local thrust coefficient can be calculated as follows:
where
ρ is the density of flow,
n is the rotational speed,
D is the diameter of rotor,
R is the radius of rotor,
dT is the thrust of local blade element,
dr is the span of local blade element.
Figure 6 shows that, under the upper rotor’s induced flow, the thrust coefficient of the lower rotor was often smaller than that of the upper rotor, because the actual attack angle of the lower blade was affected by induced flow. Similarly, when the BVI phenomenon occurred at a 90-degree azimuth gap, the flow induced by the tip vortex of the upper rotors influenced the flow field near the lower blade by increasing the axial velocity on one side of the vortex and decreasing it on the other, thus altering the partial attack angle of the blade and causing a partial lift offset. Therefore, within the region of 0.6 R to 0.9 R, the C
T spanwise distribution curve shows an S-shaped fluctuation. Away from the interference of the BVI, the C
T distribution of the upper rotor was similar at different azimuth gaps. At an azimuth gap of 90 degrees to 130 degrees, the C
T distribution of the lower blade changed a little, which indicates that the BVI was still strong. At an azimuth gap of 70 degrees, the S-shaped fluctuation of the curve went down, which indicates that the BVI gradually diminishes because the tip vortex of the upper rotor moves away from the lower blade.
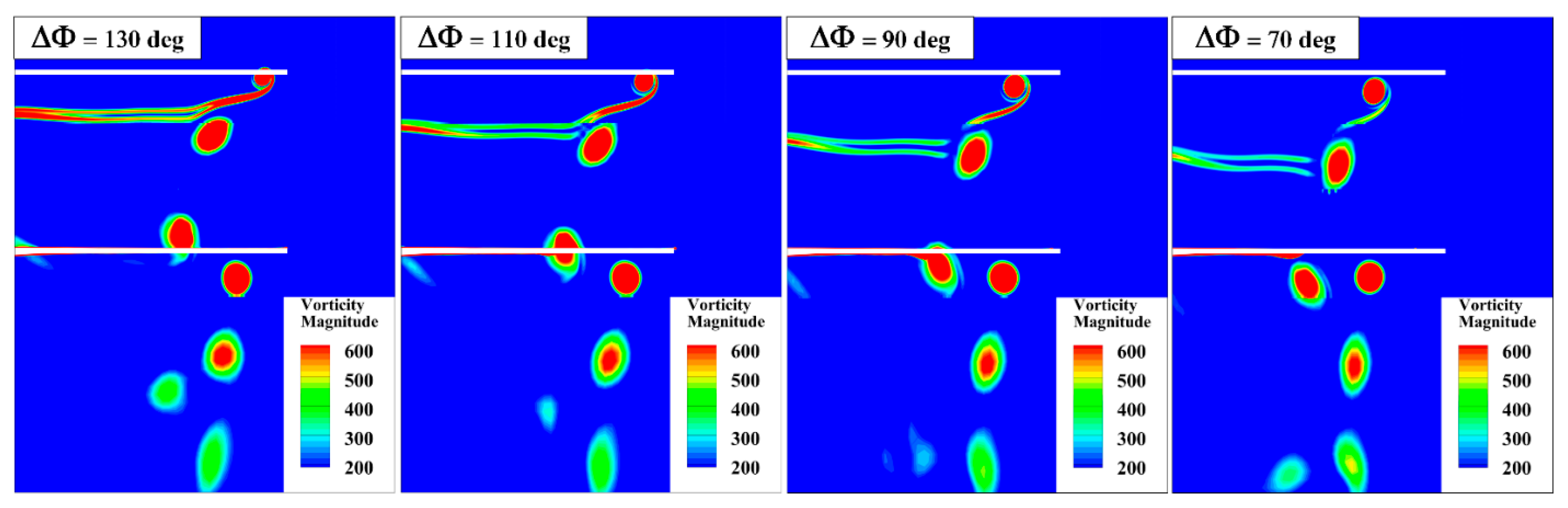
Figure 7 displays the vorticity magnitude contours at the vertical slice where the lower blades were located. When the azimuth gap was 130 degrees, the wake of the upper rotor passed over the lower blade. The wake structure of the upper rotor remained stable without being disturbed directly by the lower blade. When the azimuth gap was between 90 degrees and 110 degrees, the wake of the upper rotor directly passed across the lower blade. Disturbed by the surface and bound vortex of the lower rotor, the tip vortex of the upper rotor broke down and dissipated quickly. When the azimuth gap was 70 degrees, the tip vortex passed underneath the lower blade and the upper rotor’s wake recovered stability because of the decrease of BVI. Moreover, when the tip vortex passed through the lower blade, on the left hand of the vortex, the local Kutta condition [
25] of the lower blade was disturbed by the induced flow of the vortex so that the wake of the lower blade moved downward.
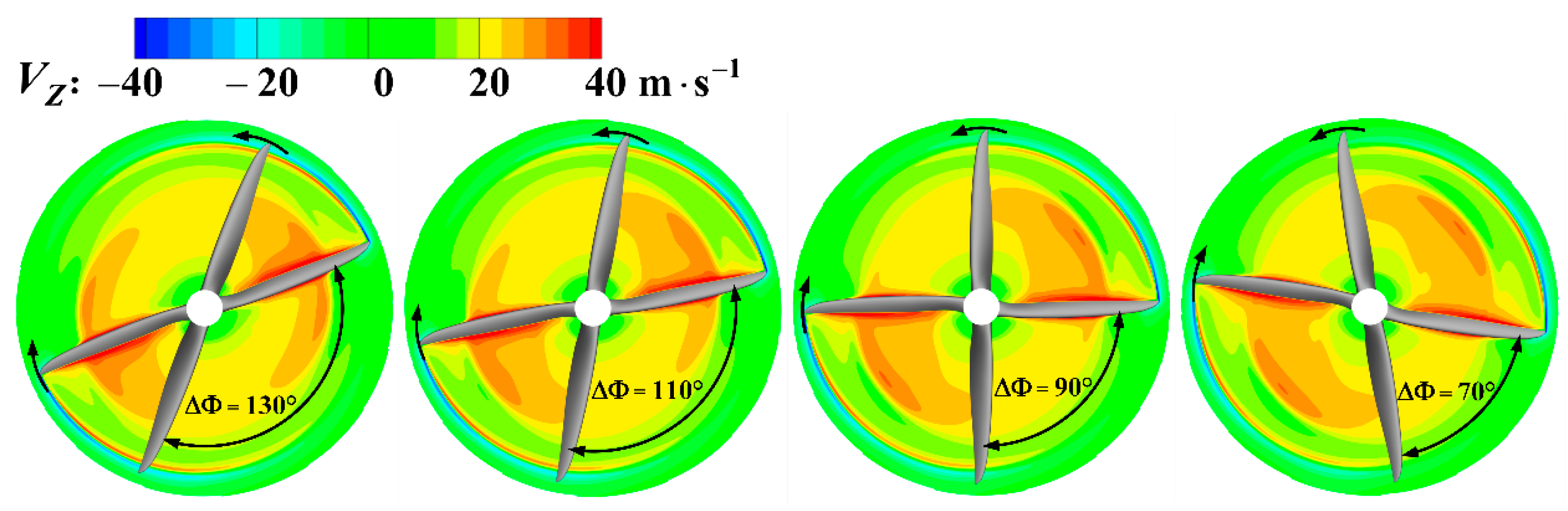
Figure 8 displays the axial induced velocity distribution of the horizontal slice where the lower rotor is located. When the BVI phenomenon occurred at an azimuth of 90 degrees to 130 degrees, the area where the tip vortex passed across the horizontal section was close to the lower blade, and the partial axial induced velocity increased, which verifies the reason for the partial lift offset on the lower blade. As the azimuth gaps between two rotors decreased, the upper blade and its tip vortex moved to the latter azimuth. However, for lower blade, due to the opposite rotational direction, the tip vortex actually went through the horizontal section at an earlier azimuth. With addition of the movement of the lower rotor, the region affected by the tip vortex was far away from the lower blade. This means that the vortex of the upper rotor had little interference with the lower blade, so that the BVI phenomenon decreased.
3.2. Effect of Rotational Speed
In this section, how rotational speed influences the BVI phenomenon is investigated while rotor spacing h/R is maintained at 0.438.
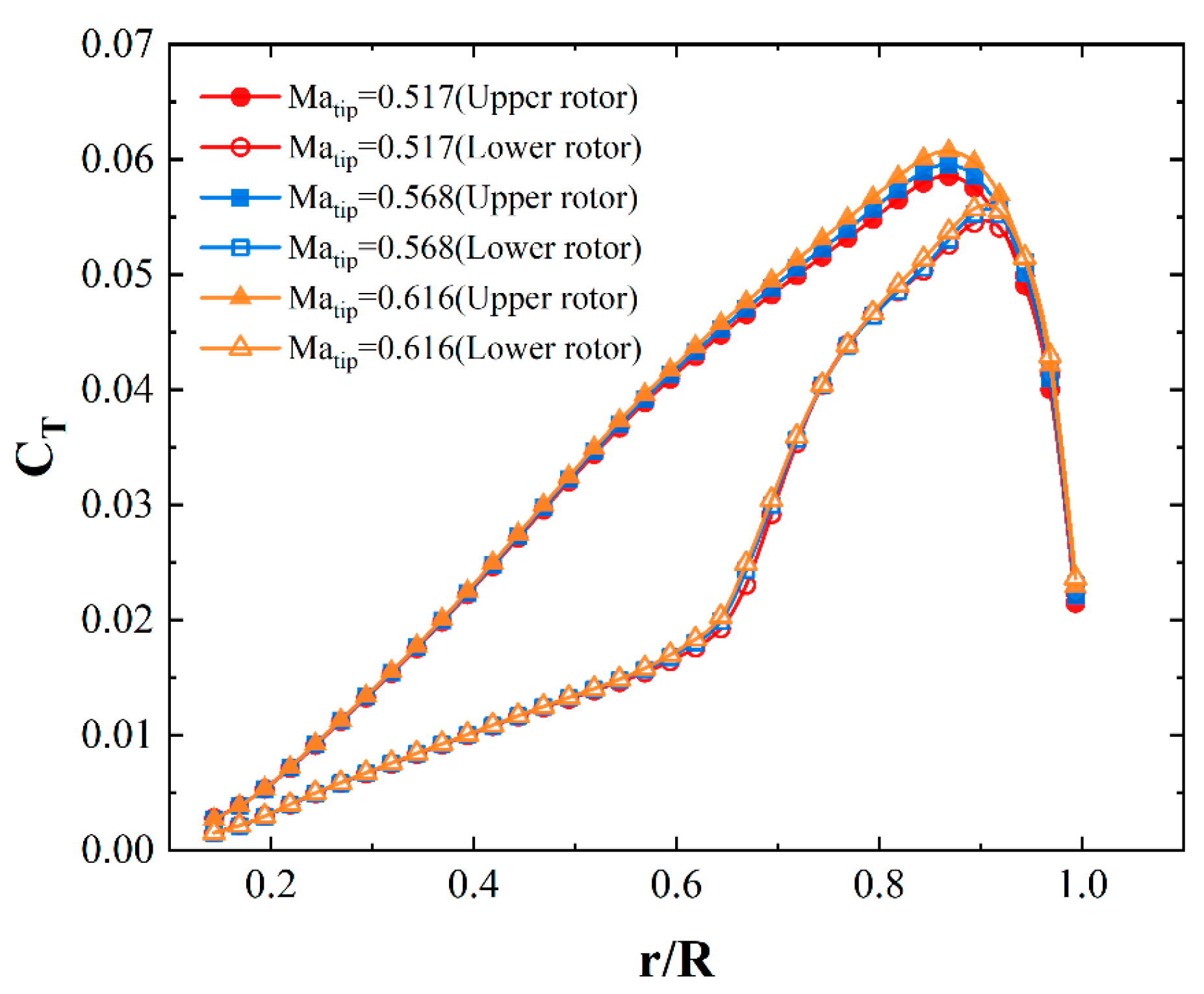
Figure 9 displays the spanwise distribution of the thrust coefficient of the coaxial rotor at various rotational speeds when the azimuth gap between the two rotors is 90 degrees. The thrust coefficients of the upper rotor increased slightly as the rotational speed increased, and the curves of the spanwise thrust coefficients of the lower rotor at different rotational speeds were similar, indicating that the BVI phenomenon was almost not strengthened as the rotational speed increased.
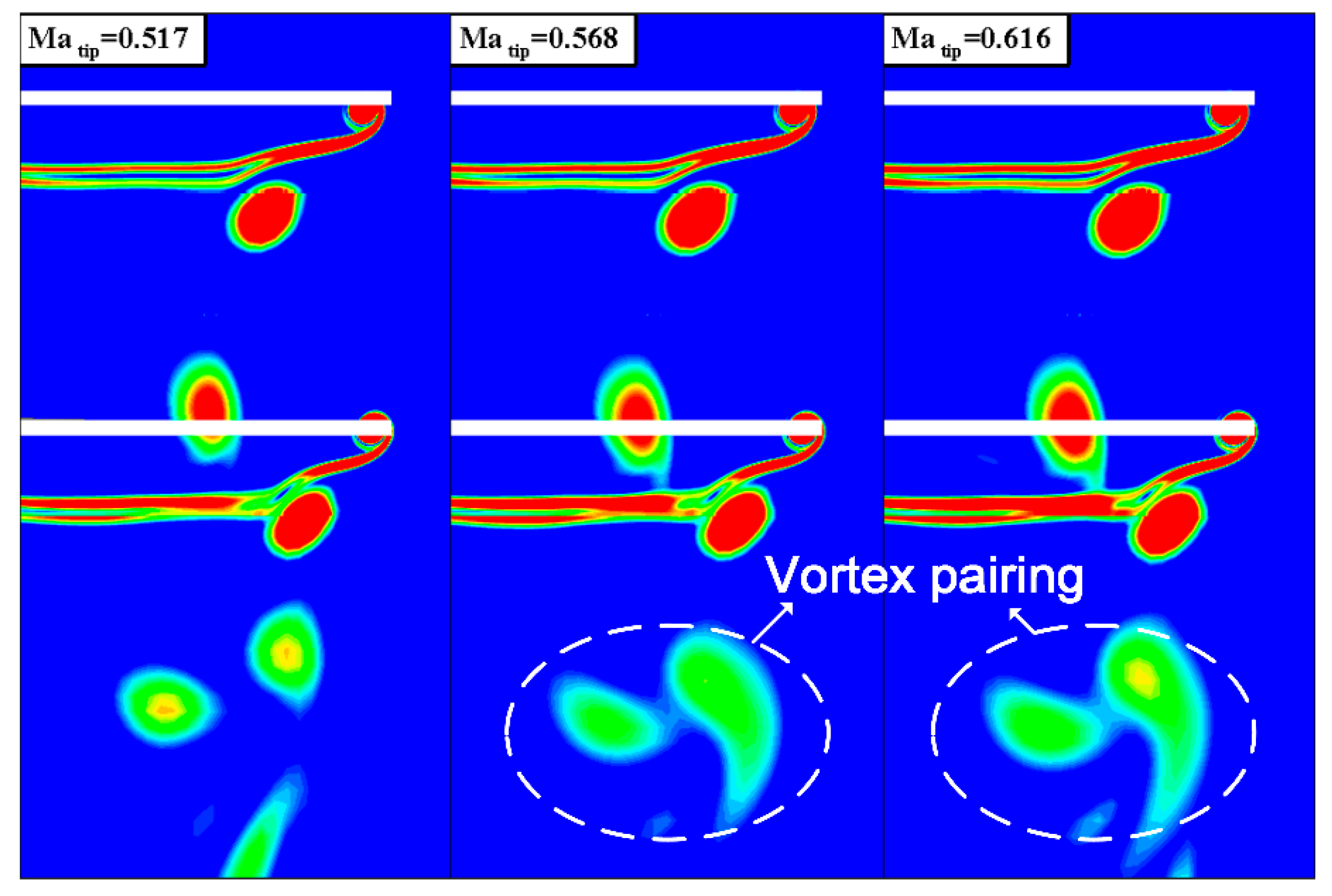
Figure 10 displays a comparison of two-dimensional wake plots at different rotational speeds when the azimuth gap is 90 degrees. The tip vortex of the upper rotor was strengthened as the rotational speed increased, and the vortex core moved downwards due to the acceleration of axial induced flow from the upper rotor. As rotational speed increased, the bound vortex of the lower rotor became stronger, resulting in a significant disruption to the tip vortex of the top rotor. As a result, the vortex structure of the top rotor became unstable after passing through the lower blade. Due to the strengthening of the tip vortex, the vortex of the top rotor and lower rotor were attracted to each other, resulting in vortex pairing.
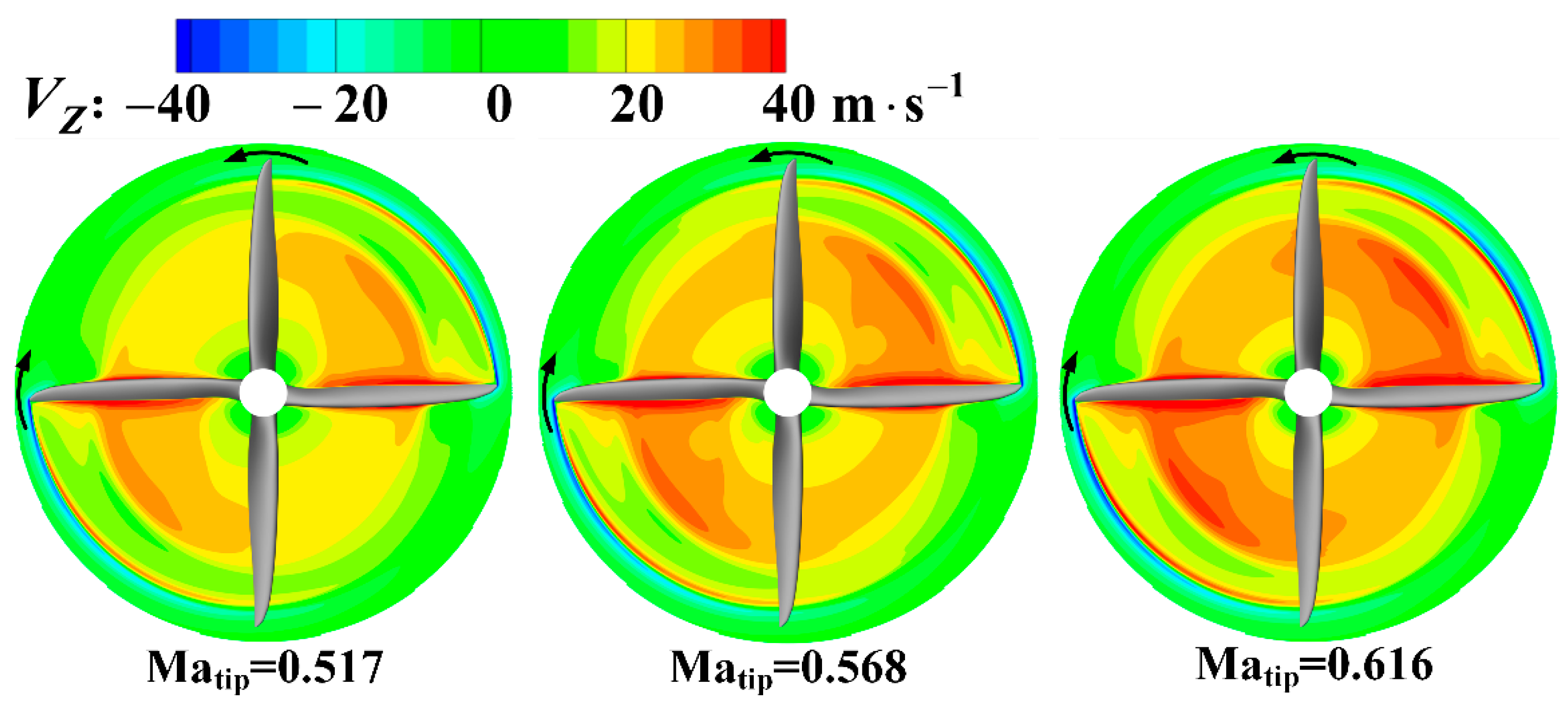
Figure 11 shows the axial induced velocity distribution of a coaxial rotor’s horizontal section where the lower rotor is located at different rotational speeds. As the rotational speed increased, the area in the horizontal section where the tip vortex of the higher rotor was moved slightly away from the blade of the lower rotor so that tip vortex was less likely to affect the axial velocity of flow near the lower blade. However, the vorticity of the tip vortex increased as well, implying that the axial velocity of flow at a farther area can be accelerated by the vortex. Moreover, because of the increase in the lower rotor’s rotational speed, it needed a higher velocity of induced flow by vortex to change the local attack angle of the lower blade. Under the superposition of these influences, the effects caused by the BVI phenomenon on the spanwise load distribution of the lower rotor were similar when the rotating speed of the coaxial rotor increased.
3.3. Effect of Rotor Spacing
In this section, the influence of BVI to the thrust distribution and wake structure of coaxial rotors at different rotor spacing is analyzed, while the rotational speed, expressed as the tip-Mach number, remains at 0.517.
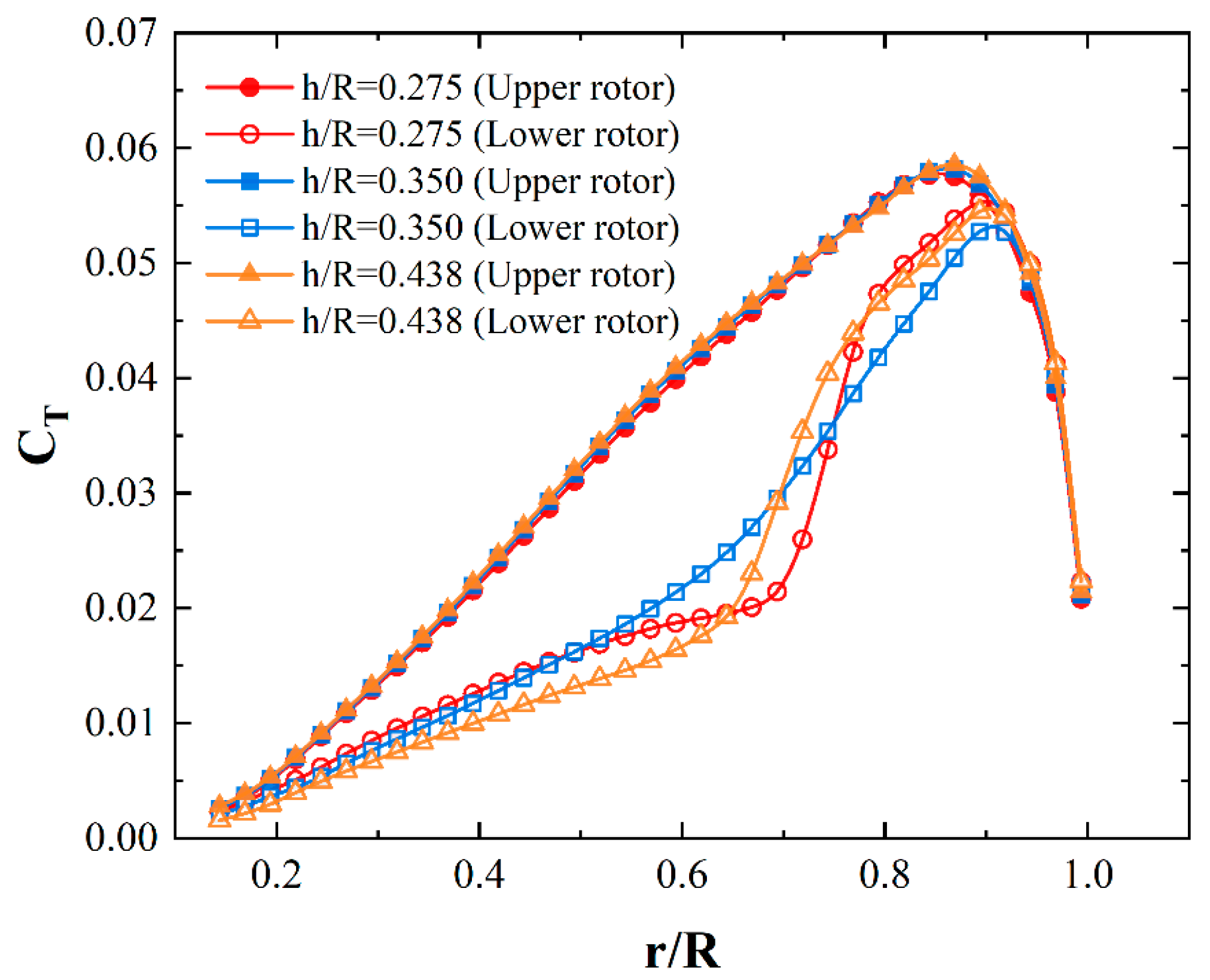
Figure 12 displays the spanwise distribution of thrust coefficient for coaxial rotors with different rotor spacings when the azimuth gap between the upper and lower rotors is 90 degrees. As the rotor spacing decreased, the thrust coefficient distribution of the upper rotor stayed constant, but the thrust distribution of the lower rotor fluctuated significantly around the range near 0.75 r/R, where the tip vortex of the upper rotor passed across the lower blade. When the spacing was 0.438, there was an S-shape fluctuation in the curve of thrust coefficient distribution which was caused by the BVI. As rotor spacing decreased to 0.275, the location of S-shaped fluctuations on the curve moved closer to the tip of the blade. However, when the rotor spacing reached 0.35, the thrust coefficient gradient reduced and the curve returned to a smooth shape, indicating that the BVI phenomena did not exist at this azimuth.
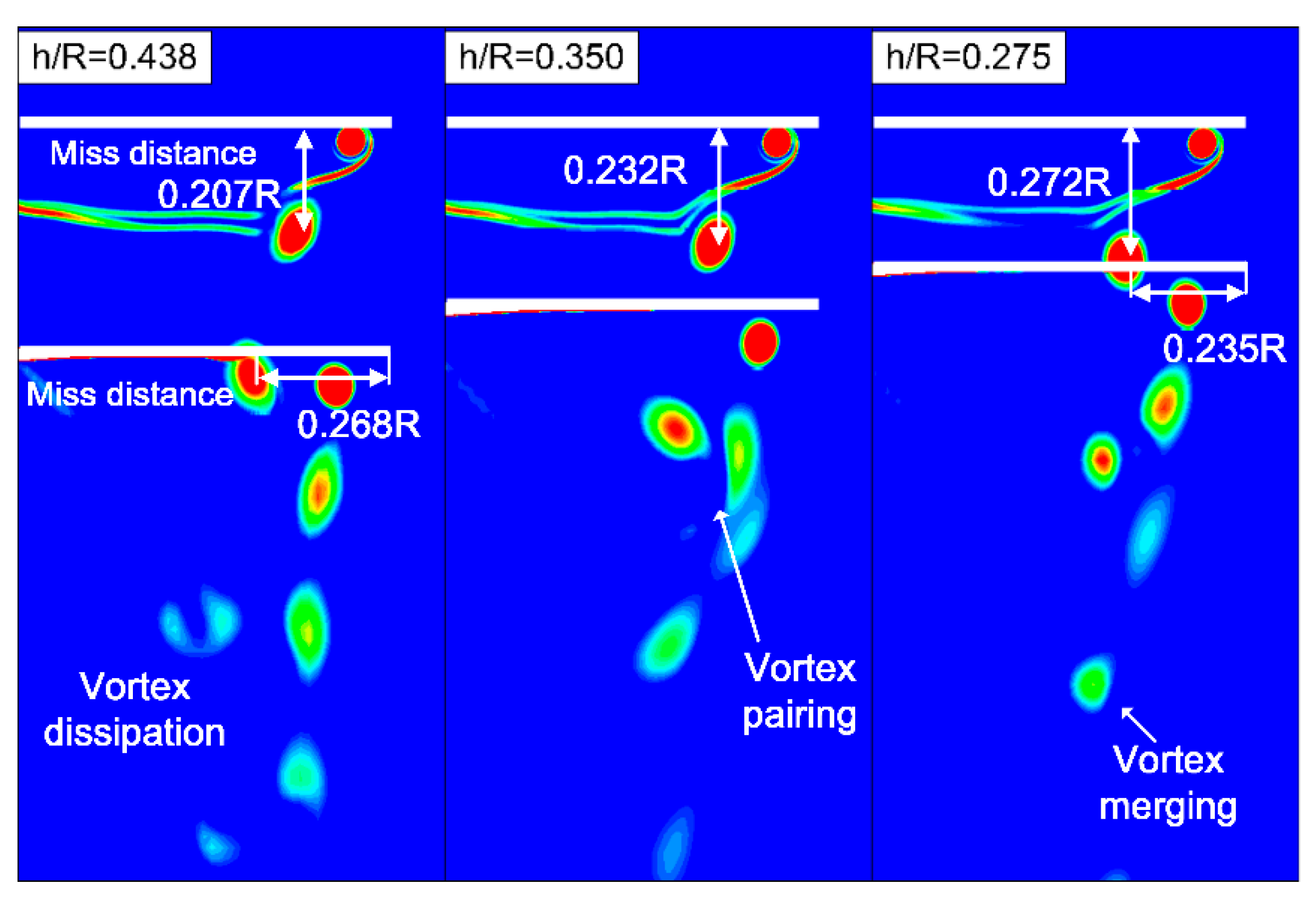
Figure 13 shows the vorticity magnitude contours in the vertical slice where the lower blades are located at different rotor spacings. Note the miss distance between the vortex and blade can be divided into axial miss distance and spanwise miss distance. The axial miss distance is defined as the vertical distance from vortex core to the horizontal section where the upper rotor is located. The spanwise miss distance is defined as the horizontal distance from the vortex to the tip of blade. With a decrease in rotor spacing, the suction from the lower rotor is strengthened, the blade-tip vortex of the upper rotor moves downwards significantly, and its axial miss distance of vortex increases. The vortex of the upper blade meets the lower blade sooner, which means the vortex takes less time to develop after being generated from the tip of the upper blade and before meeting the lower blade. As a result, the upper rotor’s spiral wake is shorter, and the viscous dissipation of the vortex decreases, resulting in a greater vortex strength as the vortex meets the lower blade, and in a stronger BVI phenomenon. Then, due to the decrease in rotor spacing, the vortex from the upper rotor does not have sufficient time to shrink before interacting with the blade of the lower rotor, and its miss distance is small. Thus, the position of BVI changes and moves closer to the tip of the blade. Because of the vortex’s high vorticity and the close distance between two vortexes, there is a stronger attraction between two vortexes, resulting in the vortex pairing and vortex merging phenomena.
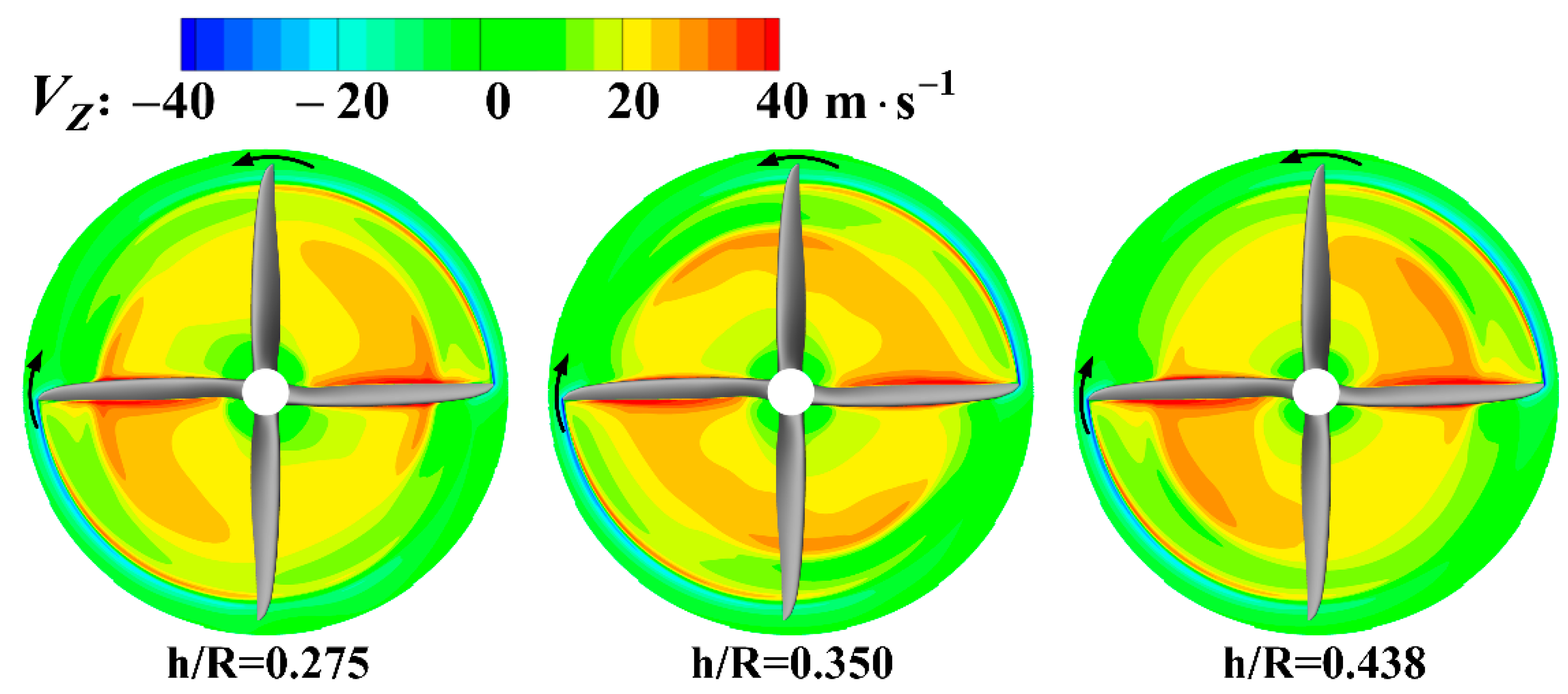
Figure 14 displays the axial induced velocity distribution of a coaxial rotor at the horizontal section where the lower rotors are located at different rotor spacings. It is shown that the region influenced by the tip vortex of the higher rotor changes as rotor spacing decreases. As a result of the 0.438 and 0.275 rotor spacing, the region the tip vortex of the upper rotor passes through is close to the blade as the BVI phenomena occurs. When the rotor spacing is 0.35, the region the tip vortex of the upper rotor passes through is far away from the blade so the BVI phenomenon does not appear at this azimuth.
4. Conclusions
This paper used CFD techniques based on uRANS solver, which has been verified by experiments, to investigate how azimuth gap, rotating speed, and rotor spacing affect the BVI phenomenon of a coaxial rigid rotor, which may be useful in eVTOL design. The conclusions can be derived as follows:
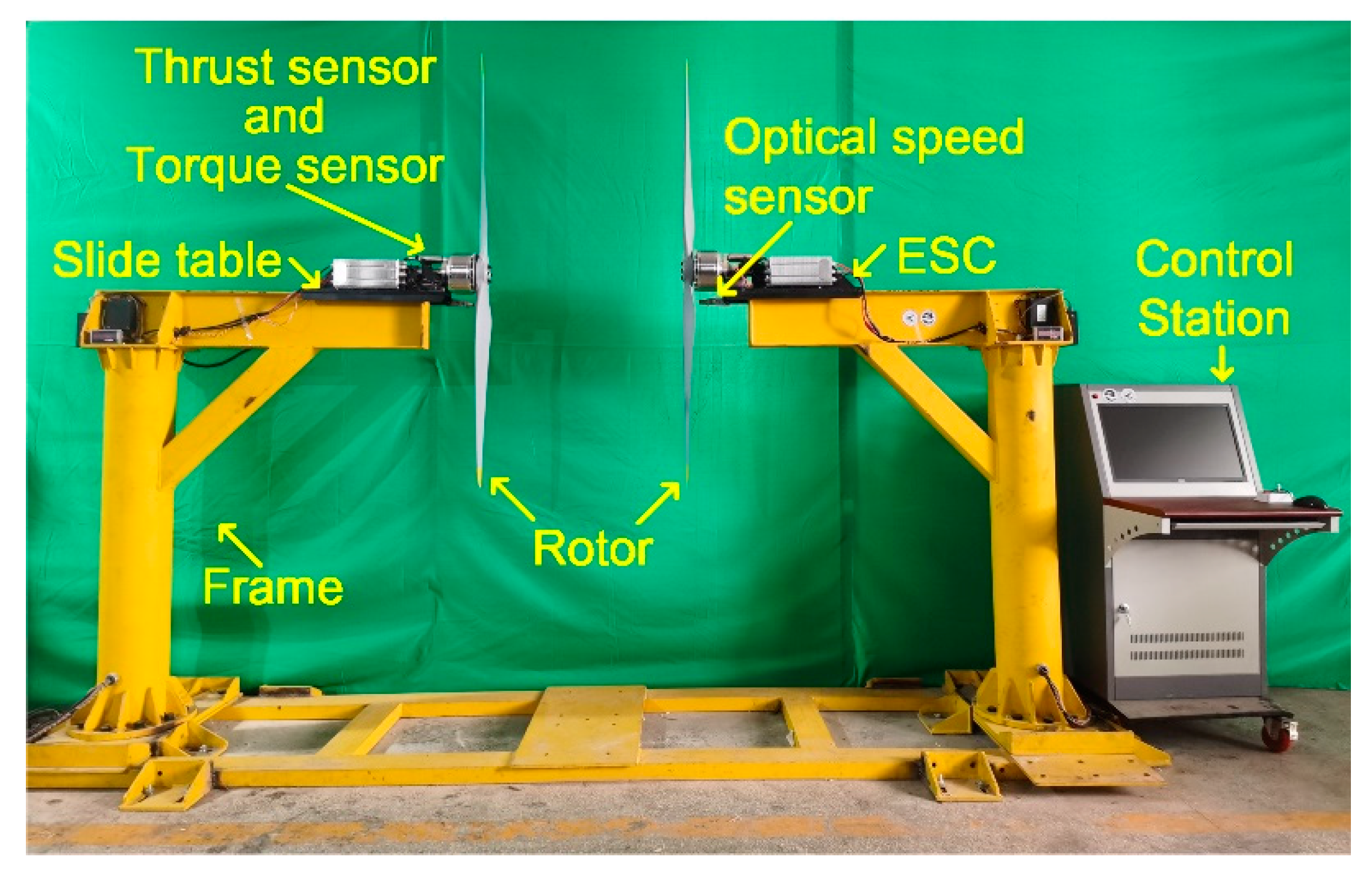
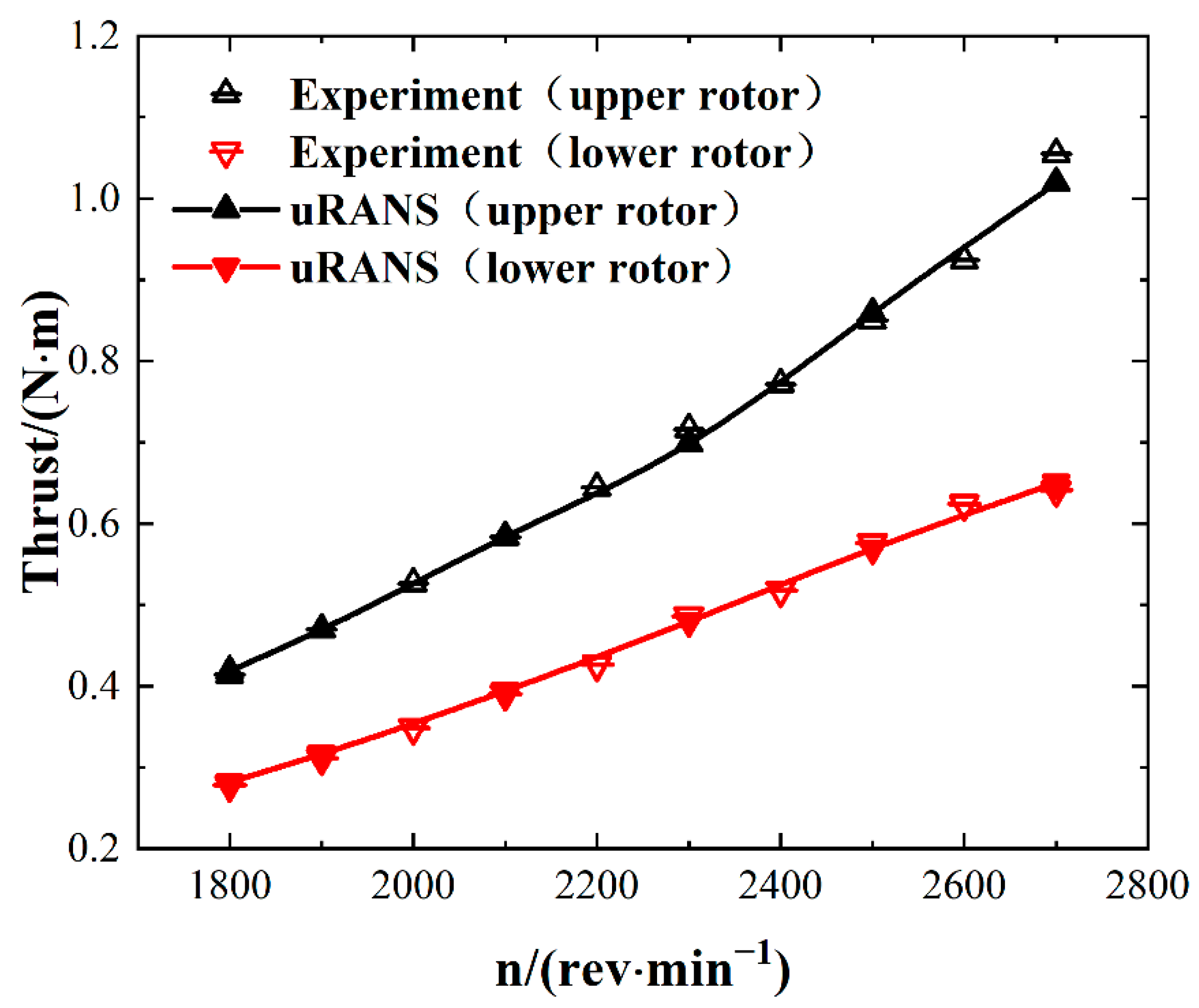
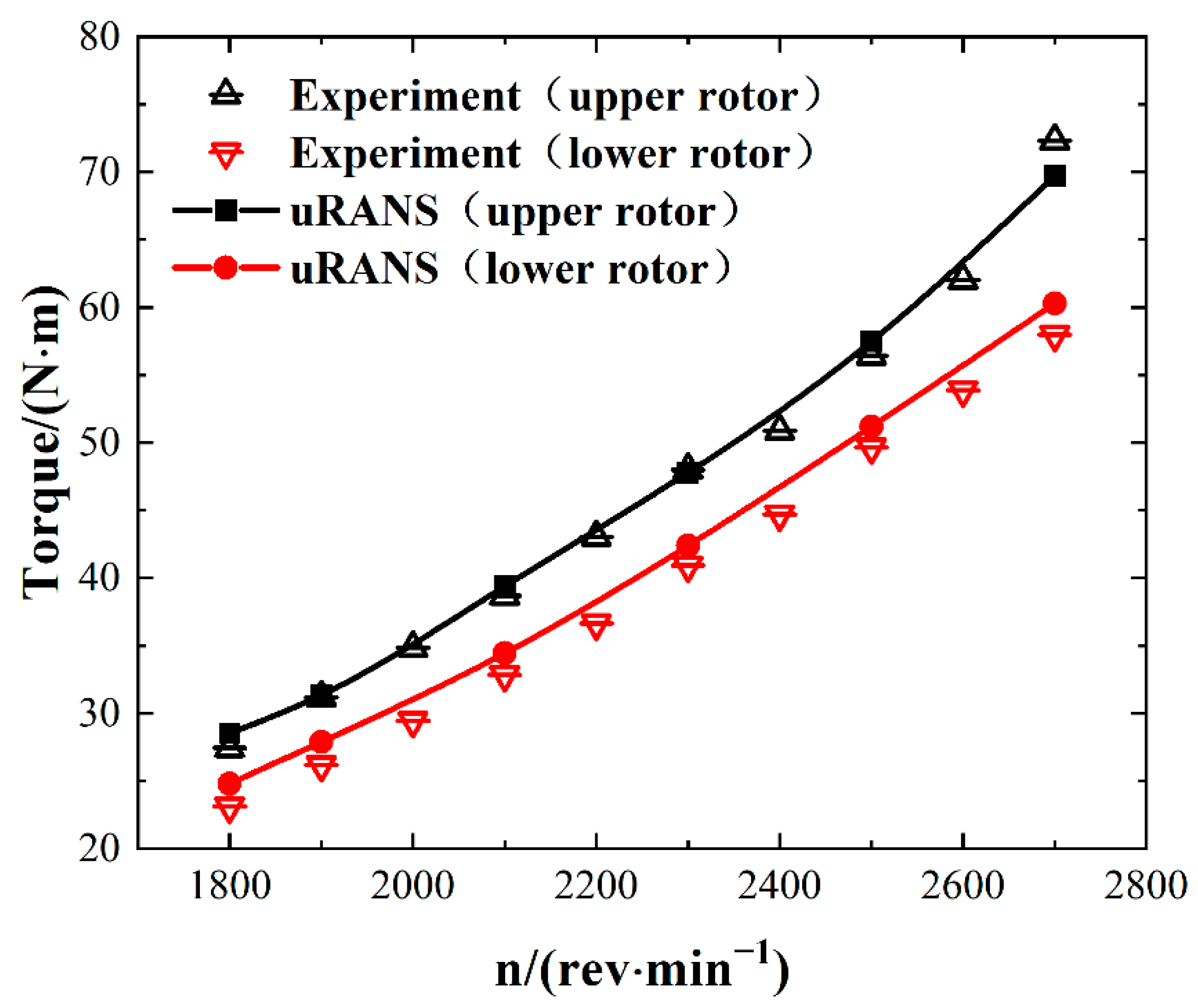
The validation of the CFD method employing the used uRANS solver combined with sliding mesh technology to simulate the motion of a coaxial system has been verified by a one-to-one experiment. The thrust and torque of each rotor in a coaxial system can be predicted accurately using this method.
The BVI phenomenon always occurs in a particular range of azimuth gap when the tip vortex of the upper rotor is close to the blade of the lower rotor. As the BVI phenomenon occurs, the tip vortex of the upper rotor will influence the axial induced flow near the lower blade and alter the spanwise thrust coefficient distribution of the lower rotor, resulting in an S-shaped fluctuation on the thrust coefficient curve. When the BVI phenomenon occurs, the surface and bound vortex will also impact the stability of the vortex structure of the upper rotor and accelerate its dissipation.
As the rotational speed increases, the vortex cores of the upper rotor descend and move away from the lower blade, whereas the vorticity strength of the vortex increases. The two effects counteract each other, resulting in a small change in BVI. At different rotational speeds, the spanwise distribution of thrust coefficient on the lower blade is similar.
As the rotor spacing decreases, the position of the upper rotor’s vortex core changes significantly: the axial miss distance increases, and the spanwise miss distance reduces. The BVI phenomenon gains strength and its position moves close to the tip of the lower blade. Because of the decrease in spanwise miss distance, the tip vortices from the two rotors approach each other, resulting in vortex pairing and vortex merging.
As a concluding remark, the present work simulated the motion of a coaxial rotor at different azimuth gaps, rotational speeds, and rotor spacing, and discussed the effect of these variables on the BVI phenomenon. It is hoped that the results of this research will offer guidance to select a reasonable configuration while using the coaxial rotor system in eVTOL design.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}














