1. Introduction
Offshore wind energy is an increasingly global industry, with over 50 GW currently installed (
https://www.energy.gov/eere/wind/articles/offshore-wind-market-report-2022-edition, accessed on 9 September 2022). Nearly all the installed turbines are fixed-bottom, and have benefited from existing technology learning curves, established supply chains, and cost reductions. Few commercial floating offshore wind turbines (FOWTs) exist primarily because of their relatively nascent status and their increased cost compared to fixed-bottom offshore systems. However, there are significant opportunities to optimize FOWT systems and reduce costs to increase deployment. In particular, control co-design—integrating controls directly into the design process of the FOWT system—is a key enabling technology for reducing the levelized cost of energy for FOWTs. Wind turbine controls can reduce the loading and dynamic motions of the systems, and they can provide mechanisms to facilitate system light-weighting and cost reductions. To enable these benefits, the ARPA-E Aero-Dynamic Turbines, Lighter and Afloat, with Nautical Technologies and Integrated Servo-Control (ATLANTIS) program has funded multiple partners and collaborators (introduced in
Section 3) to explore higher-fidelity control co-design. The Floating Offshore-wind and Controls Advanced Laboratory (FOCAL) experimental program targets the experimental validation of control co-design tools and concepts developed within the ARPA-E ATLANTIS program. The four FOCAL experimental campaigns validate turbine controls, hull design and controls, hull member flexibility, and fully coupled wind–wave system dynamics, respectively.
Control co-design can be enabled through an improved understanding of the system dynamics via numerical simulations and scaled experiments. Several offshore wind model-scale experimental validation data sets have been published in the last few decades. The DeepCwind consortium published several experimental validation data sets between 2010 and 2014 for a 1:50-scale model of a 5 MW reference wind turbine (RWT) on three different floating platforms (tension-leg platform, spar-buoy, and semi-submersible) for a wide variety of met-ocean and wave conditions [
1]. For the DeepCwind tests, the turbine blades were rigid, the tower was flexible, and both the pitch and rotor speed were fixed to a constant value (due to limited active turbine control [
2]). One major difference from the current experimental campaign is that DeepCwind is a coupled wind–wave floating test without turbine controls, and the present study is a wind-only test with active turbine controls (as a first step to including turbine controls in coupled wind–wave tests in upcoming FOCAL campaigns). Robertson et al. proposed multiple suggestions for future test campaigns, such as using a blade designed for a low Reynolds number (Re), mitigating all impacts of instrumentation cabling, applying appropriate wind loading, and independently validating the turbine behavior [
1]. These issues were addressed in the current FOCAL experimental test campaign.
In 2014, Bottasso, Campagnolo, and Petrovic expanded the scaled wind tunnel testing beyond aero-dynamics into areas such as (i) the aero-servo-elasticity of wind turbines in extreme operating conditions and environments and (ii) the effects of upstream turbines on downstream turbines on a wind farm [
3]. Their experimental campaign studied a 3 MW turbine based on the Vestas V90 at 1:45 scale. They employed individual blade pitch control and torque control to enable the testing of modern control strategies. To account for Re scaling effects (two orders of magnitude difference), they used special low Re airfoils (AH79-100C and WM006). They were able to match thrust, although at reduced power [
3]. Please note that they used individual pitch control, whereas collective pitch control is used in the present study. In addition, they employed an onshore turbine, whereas the current study uses a significantly larger offshore turbine as the design reference on a fixed base. Finally, their study included aero-elastic effects, whereas the present work does not.
In 2017, Bayati et al. performed an experimental validation of a 1:75-scale model of the Danish Technical University (DTU) 10 MW RWT [
4]. They focused on the aero-dynamic characteristics and behavior of the system, and they performed their experiments in a wind tunnel. They also experienced a Re discrepancy of more than two orders of magnitude, and, therefore, used a dedicated low Re airfoil (SD7032) to achieve the target thrust level (power was not matched). Their turbine had individual pitch control, and they had relatively high velocity scale factors (~2–3). They did not use Froude scaling [
4]. Bayati et al. and the present study both emphasize the turbine aero-dynamic performance with some level of controls, but the present study is performed in a wind–wave basin (different boundary conditions) with a significantly larger Froude-scaled turbine.
Yu et al. (2017) experimentally tested a real-time collective blade pitch control system in a wind–wave basin using an active controller on a 1:60-scale model of the DTU 10 MW RWT [
5]. The triple spar floating platform was a concrete hybrid between a spar and a semi-submersible developed by INNWIND. The authors used low Re airfoils to account for the effects of Re scaling, which were designed to match only the thrust (not the power). They investigated the influence of different gain scheduling methodologies of the pitch controller on the system dynamic behavior. They showed that with the low Re rotor, it was possible to control the rotor speed by actuating the blade pitch, which had been demonstrated previously in [
2], using a gain-scheduled proportional–integral blade pitch controller in a wind–wave basin. They used two different controller methodologies: (i) a retuned version of the National Renewable Energy Laboratory (NREL) 5 MW baseline controller (a gain-scheduled proportional–integral controller) and (ii) a controller based on a coupled gain-scheduling and design method, which accounted for the rigid-body motion of the whole floating system [
5]. The present work uses higher-fidelity numerical tools and validates an additional controller feature (setpoint smoothing in the transition region) on a larger turbine.
A review of available floating wind turbine controllers is presented in Namik and Stol’s work, 2013 [
6]. They largely focused on numerical and simulation work, including the offshore code comparison collaboration projects. They reviewed individual and collective blade pitch control schemes, single-input–single-output (SISO), and multi-input–multi-output (MIMO) controllers, and multiple control algorithms.
In 2016, Fleming, Peiffer, and Schlipf performed some control design work to optimize a wind turbine (NREL 5 MW RWT) controller atop the WindFloat semi-submersible platform [
7]. They employed a controller designed for fixed-bottom offshore wind turbines, and they upscaled the NREL 5 MW RWT to 8 MW. Their numerical results included an efficient platform heel resonance mitigation scheme and controller upgrades, as well as a reduction in fatigue loads and blade pitch travel.
The recent body of work (2018–2021) by Frank Lemmer and team [
8,
9,
10,
11] examined controller characteristics and behaviors using simplified, reduced-order numerical models. Their extensive controller design work (they performed controller tuning in an optimization framework) is important context for controls co-design and the controller features discussed herein. They examined controller design with a pitch stabilization loop, control methodologies for SISO and MIMO controllers, and aero-elastic effects on controller behavior and performance on 10 MW floating offshore reference turbines. All this work included appropriate gain scheduling and controller tuning for the chosen applications, and it was entirely numerical in nature. The authors compared the lower-order simpler codes to the higher-order NREL OpenFAST tool suite. This team published an extensive body of works on controller design for FOWTs; an exhaustive list is not presented here.
In 2020, Lenfest et al. discussed more accurate controller tuning strategies and gain scheduling methods for collective blade pitch controllers for FOWTs using OpenFAST [
12]. They found that the proposed tuning method exhibited power regulation performance comparable to a standard turbine proportional–integral controller with a minimal increase in blade pitching activity. These results could aid in calibrating NREL’s reference open source controller (ROSCO).
Han and Nagamune [
13] numerically studied employing standard turbine controls (generator torque, blade pitch, and yaw controls) to control the position (in surge and sway) of a FOWT using OpenFAST. Their goal was to minimize the wake effect in order to maximize the power production of a floating offshore wind farm. Though this was a different problem than the one examined here, their results included directly providing the controller tuning and gain scheduling parameters for a proportional–integral–derivative controller. These controller parameters and algorithms can support a better understanding of our results.
In 2022, Stockhouse et al. [
14] numerically explored control strategies and actuators for the 10 MW ultra-flexible smart floating offshore wind turbine (USFLOWT) on the SpiderFLOAT platform using OpenFAST. They improved their baseline controller through detuning and parallel compensation with blade pitch and generator torque. They also analyzed the effects of two actuators for active platform control on system performance. They demonstrated that control co-design offers promise for yielding a more optimal solution [
14].
The ROSCO [
15] is an upgraded open-source sequel to the NREL controller referenced in [
6]. It has significantly upgraded features and capabilities developed by the NREL team over the last decade, including (but not limited to) a reference controller with industry-baseline functionality and a complementary toolbox for generic tuning and verification.
The current study expands on this previous work by employing a significantly larger floating offshore wind turbine (the IEA wind 15 MW RWT) than all previous studies. In addition, these experiments represent, for the first time, the ROSCO [
15] being validated experimentally in a wave basin and providing valuable quantitative data for controller tuning and gain scheduling. Finally, this research introduces and validates a new controller feature—setpoint smoothing in the transition region—than used in previously published work. All these new results aim to enable control co-design, which is an important pathway for reducing the levelized cost of energy of FOWTs.
4. Load Case Definitions
For the verification and validation of the turbine dynamics, three categories of load cases (LC) were chosen to run both experimentally and numerically, including how the turbine responded to (1) varying rotor speeds (LC 1.X), (2) varying collective blade pitched (LC 2.X), and (3) varying wind environments (LC 3.X). In LC 1.X and LC 2.X, variations in turbine operational parameters were prescribed to ensure a consistent aero-dynamic response, to validate the turbine aero-dynamic performance, and to verify aero-dynamic sensitivities that were used in tuning a closed-loop controller (such as the ROSCO). LC 1.X and 2.X did not have active closed-loop pitch control. In LC 3.X, the ability to integrate active closed-loop control was verified and the aero-dynamic response to the controller actions was validated.
Table 4 below summarizes the inputs and conditions for both experiments and simulations. There were 4 load cases within LC 1.X, 5 within LC 2.X, and 6 within LC 3.X, for a total of 15 load cases.
LC 1.X focused on two wind speeds (one around the maximum thrust setpoint and the other above the rated condition), and the pitch was fixed at two different values, each with varying rotor speeds. The Cp-Ct surface required for controller operation was generated from this data set, as were the controller gains and other parameters. LC 2.X studied the system response to varying pitches with fixed wind speeds and rotor speeds. Three stepped pitch cases and two ramped pitch cases in different pitch regimes were used to examine the system behavior about the setpoints. Controller sensitivities to pitch were derived from these results, which could be directly incorporated into the controller design, gain scheduling, and tuning. LC 3.X investigated the controller behavior (active pitch and torque control) during various wind environments. Five wind environments were analyzed: steady wind, stepped wind, wind gust, sinusoidal wind, and spectral wind. Controller sensitivities and parameters were calculated, and the damped system response was measured and characterized. Each of these load cases was described in detail in
Section 5 below. Numerical outputs were chosen to match the available experimental outputs. All participants provided results for each load case in the following format (see
Table 5).
It should be noted that for LC 3.1–3.5, the setpoint smoother in the ROSCO was switched on (SS_mode = 1) and the peak shaver/pitch saturation was off (PS_mode = 0). For LC 3.6, both the setpoint smoother and peak shaver were turned off (SS_mode = 0 and PS_mode = 0). This controller setting was the only difference between LC 3.5 and LC 3.6. In addition, output channels 13 and 14 were not measured experimentally. All results were compared as full-scale equivalent values.
5. Results and Discussion
In this section, experimental and numerical results were presented in the context of control co-design; that is, how they could be employed in controller tuning and settings to enable controls to be embedded in the overall system design. All results were presented in full-scale values and were low-pass filtered at 0.08 Hz (just below the 1P frequency). The 0.08 Hz value was specifically chosen to be lower than the 1P frequency in order to filter out the 1P and any higher frequencies. Because the airfoil polars were generated from experimental data near the rated condition [
9] (and, thus, were the most accurate) and most of the LC 3.X results were near the rated condition, it was collectively decided to focus on the transition region (wind speed = 12.83 m/s) results.
5.1. Load Case 1.X: Varying Rotor Speed
For these load cases, steady-state results at eight prescribed/fixed rotor speed values (3–10 rpm) were shown. The turbine static offsets were removed from the tower top forces and moments. For these load cases, the controller was not active, and the rotor speed and pitch were fixed.
Figure 3 presents the rotor thrust and torque as functions of rotor speed for a fixed blade pitch angle and wind speed. As expected, the torque peaked roughly around the rated rotor speed (7.56 rpm) and the thrust roughly matched the peak thrust of the IEA wind 15 MW RWT (~2.75–2.8 MN) at the rated rotor speed.
Figure 3 also shows that all numerical results compared quite well and had similar trends to the experimental data. Note that some experimental data were missing at the higher rotor speeds due to loading and limitations in the wave basin. The numerical results were within 2–30% of the experimental results for the thrust, and the torque numerical results had errors of up to 50%, with respect to the experimental results. The largest errors were observed at the lowest rpm value (three), which was the result of small values of approximately zero being scaled to full-scale.
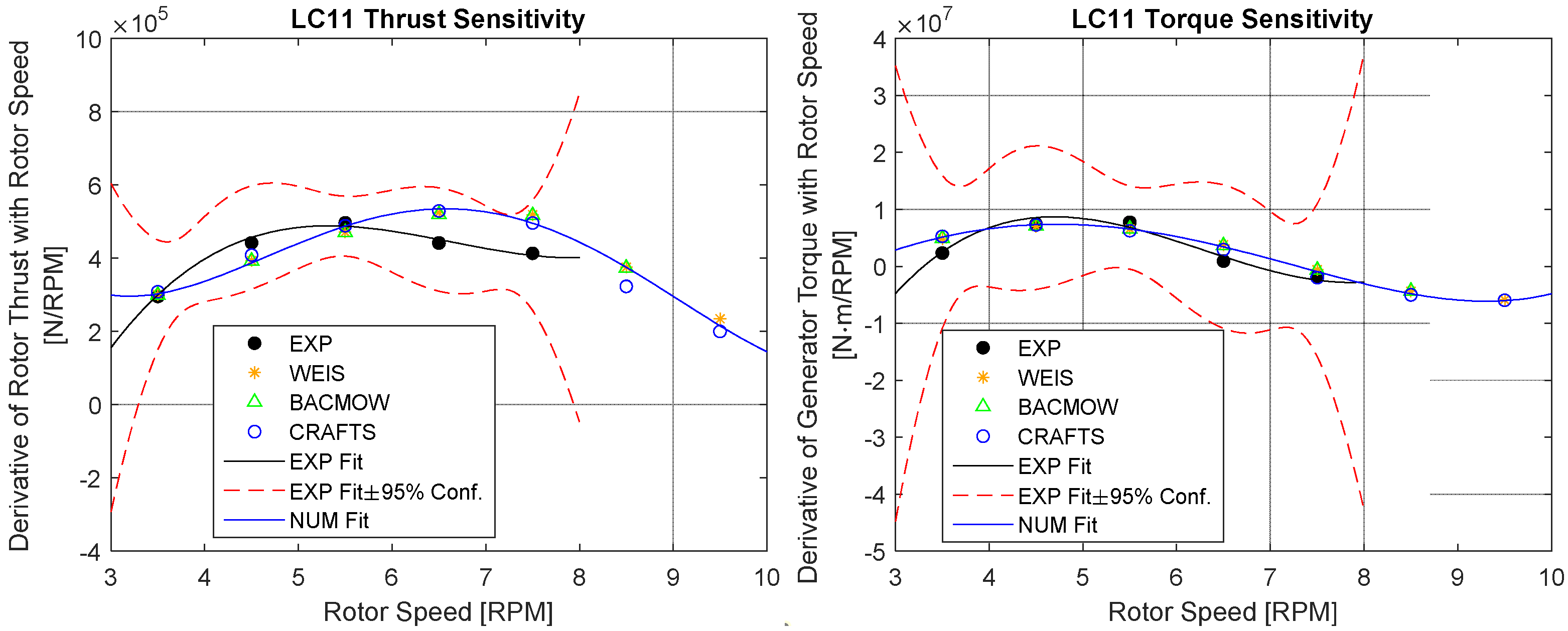
For controller tuning, the derivatives (or sensitivities) of the rotor thrust and torque with respect to rotor speed were required. For example, the sensitivity of the torque with respect to the rotor speed (∂
Q/∂
Ω) was used in the calculation of the proportional controller gain in the ROSCO via Equation (1) [
15]:
where
KP is the controller proportional gain and
B|v is the sensitivity of the torque with respect to the blade pitch angle (
∂Q/∂θ) at a particular wind speed. The calculation of this gain was based on the assumption that the closed-loop system was a second-order system and that the desired values of the closed-loop natural frequency
ωDES and damping
ζDES were specified, as described in [
15].
Figure 4 shows these sensitivities to rotor speed for torque and thrust. Polynomial fits of the data points from
Figure 3 were analytically differentiated to estimate the derivative shown as continuous curves. Numerical derivatives based on the central differencing of the data points in
Figure 3 were included for reference (data points). Because of there being fewer available data points, the experimental thrust and torque data were fitted with a fourth-order polynomial, whereas the numerical results were fitted with a fifth-order polynomial to better describe the trend. The blue line represents the polynomial fit with all modeling results. The black line is the polynomial fit with the experimental results. The red dashed lines show the 95% confidence interval of the true experimental thrust–speed and torque–speed sensitivity relations. Please note that this uncertainty estimate considered only the random error in the experimental data points in
Figure 3 and not the systematic bias, if any. A single polynomial fit was performed with all numerical results to avoid selection bias and favoritism. The polynomial coefficients for these experimental and numerical sensitivities are available on request, to be used as indicated in Equation (1) for the controller gains.
Results for the tower top forces and moments for LC 1.1 are presented in
Figure 5 below. The numerical results correlated with the experiment quite well, with similar trends and magnitudes. Experimental flap-wise and edge-wise blade root bending moments were not available, but verification between numerical codes could be performed. The numerical blade root bending moments matched each other well, and the tower top F
Y and M
Z loads were near zero, as expected. The small values in the experiment were due to miniscule force and moment sensor readings scaled to full-scale values.
The results for LC 1.2, which was similar to LC 1.1, but with a pitch of 10°, were discussed here, but no summary plots were shown. The overall trends and magnitudes between the numerical and experimental results for the thrust, torque, and tower top forces and moments matched well. Similarly, the numerical results for the flap-wise and edge-wise blade root bending moments were quite close; most of the differences ranged between ~0–20% and ~0–40%, respectively. The primary difference in the post-processing of the LC 1.2 results was that a second-order polynomial was used to fit the limited experimental data (note that experimental results were limited to rpm = 3–6) and, subsequently, differentiated to yield the derivatives of thrust and torque with respect to the rotor speed. The numerical polynomial coefficients for the two sensitivities were computed in the same manner as described above. To enable and improve control co-design, the coefficients can be provided on request.
5.2. Load Case 2.X: Varying Pitch
In LC 2.X, the rotor speed was fixed at the rated speed (7.56 rpm) and the pitch was varied with both stepped and ramped profiles. Continuing to focus on those load cases around the transition region,
Figure 6 illustrates the prescribed pitch schedules for LC 2.2 and LC 2.4. The ramped cases were executed in the wave basin as tiny steps that approximated a ramp. Though setting pitch setpoints in the wave tank was fairly straightforward, the numerical tools could have difficulties with the discontinuities (step changes), such as the step change in the pitch at t = 0. As a result, pre-simulation time was added to the simulations during run-time and, subsequently, removed during post-processing to remove initial transients or artifacts from the numerical results. Carrying this out allowed the simulations to behave well during the initial pitch step. In addition, the WEIS team smoothed the pitch steps throughout the time history to enable OpenFAST to better handle the discontinuities (using the OpenFAST SimuLink interface).
One point of interest was the possible difference between the prescribed (input) pitch (as described by the pitch setpoints) and the measured (output) pitch from the system (as the output from the pitch encoder). The WEIS team conducted a numerical study to investigate the effects of measured versus prescribed pitches on the simulations. It was determined that using one or the other had a minuscule effect on the results (i.e., it had practically no difference), so only one set of results (measured) is presented in
Figure 7 and
Figure 8 below for clarity.
Figure 7 shows the time histories of the thrust and torque as functions of pitch for LC 2.2 and 2.4. The overall trends matched the experimental data well, and the magnitudes were the correct orders of magnitude. There was consistent under-prediction in thrust across all numerical tools, perhaps due to inaccuracies in the blade drag, uncertainties in the angle of attack, and/or Re effects. CRAFTS predicted a lower lift than BACMOW and OpenFAST.
These histories could be broken into constant values between each pitch step and the derivative taken as the change in response to each step. The WEIS team performed an analysis of the differences between stepping up and down to each pitch setpoint for each data set. The results were remarkably consistent, and the system did not exhibit a noticeable hysteresis effect. Thus, the increasing and decreasing pitch values were grouped as one and shown below in
Figure 8 for the thrust and torque, and they were used in the calculations for derivatives related to the pitch.
As was performed for LC 1.X, an analysis of the derivatives (sensitivities) of the thrust and torque with respect to pitch was performed. The integral controller gain (
KI) is a function of these sensitivities, as shown in Equation (2) [
15]:
where
B|v = ∂Q/∂θ is the derivative of torque with respect to pitch at a constant wind speed and
ωDES is the desired natural frequency of the rotor rotational DOF in a closed-loop, assuming the closed-loop was modeled as a second-order system [
15].
This derivative also appeared in Equation (1). To obtain these sensitivities, third-degree polynomials were fitted to all data points (both increasing and decreasing pitch values) for each data set (solid lines in
Figure 8). Derivatives based directly on the data were too noisy to be meaningful as shown in
Figure 8; therefore, instead, derivatives were based on differentiating the polynomial curve fits, resulting in second-order polynomials. The polynomial coefficients for the experimental and numerical derivatives of thrust and torque with respect to pitch are available on request. The red dashed lines show the uncertainty of the true relation—not of individual data points—for only the experimental data. This uncertainty estimate was based on the standard error of the estimate and only considered the random error, not the systematic bias in the experiment.
5.3. Load Case 3.X: Varying Wind Conditions
Load cases 3.X focused on tests implementing a closed-loop controller based on the ROSCO and obtaining the controller’s response to varying wind speeds. The controller actively provided real-time pitch commands based on the error between the measured rotor speed and the desired rotor speed setpoint. The load cases were post-processed differently to achieve different goals and outcomes, as described below. LC 3.1 incrementally stepped the wind speed from below-rated through the transition region into far above-rated conditions. LC 3.2 started with below rated conditions and then maintained a sustained gust well above rated conditions. LC 3.3–3.5 focused on the transition region.
Time-accurate wind speed files were generated from a combination of the experimental sensor recordings. For the three spectral cases, turbulence spectrum definitions were also provided. As was conducted with LC 2.X, pre-simulation time was added to allow for initial (artificial) simulation transients to die out and was, subsequently, removed during post-processing. Thus, all system responses/outputs were only functions of the changing wind. The four turbulence models (e.g., the uniform and coherent models) were explained in detail in
Section 5.3.3.
5.3.1. LC 3.1: Stepped Wind
For load case 3.1, the wind was stepped up from ~8 m/s to ~28 m/s with a length between steps of approximately 500 s and a step height of roughly ~0.7–1.1 m/s.
Figure 9 shows the time history of the wind field alongside the time histories of the blade pitch, rotor speed, and the tower top forces and moments.
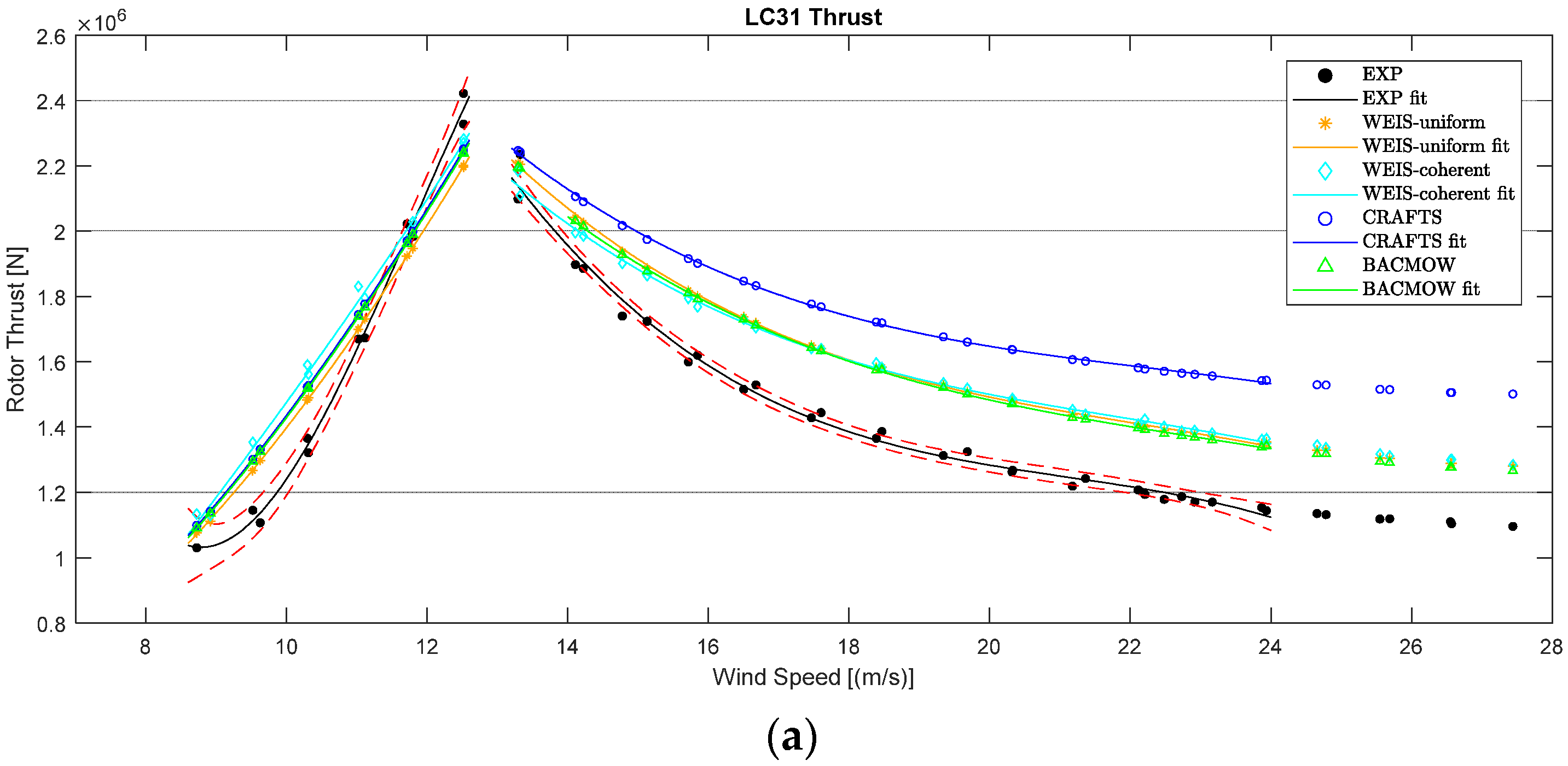
Each step could be discretized into a single steady-state value by averaging over the length held between each step. Because each step (except the highest wind speed) had both a step-up and step-down, two steady-state values could be extracted per mean wind speed. These individual points could then be plotted as shown in
Figure 10. The red dashed lines show the uncertainty in the experimental data only. As was performed for LC 2.X, a polynomial curve could be fit to these points (the solid lines) and derivatives of these polynomials could be taken to yield the sensitivities of the thrust and torque with respect to wind speed (
∂T/∂u and
∂Q/∂u). These were also presented in
Figure 10. As before, the red dashed lines show the standard error of the estimate for the experimental data only, which only considered the random error, not the systematic bias, in the experiment.
5.3.2. LC 3.2: Gust
In this load case, a steady wind (held for ~500 s) at a below-rated condition (~8 m/s) was suddenly increased to well above rated conditions (~23 m/s) and sustained at that wind speed for over 1000 s (before suddenly reducing again). The primary objective was to understand how the controller reacted to the sudden gust, specifically in terms of damped response characteristics (e.g., rise time, settling time, and overshoot/peak).
Figure 11 shows how these metrics were calculated.
The rise time was defined as the time to cover, from 10% to 90%, the difference between the pre-ramp and post-ramp levels. The peak time is self-explanatory. The settling time was based on a threshold as a percentage of the post ramp value. For rotor thrust, the threshold was +/−10% of the post-ramp thrust. For torque, it was +/−5% and +/−2% for rpm. A different percentage threshold was used for each channel because of the different noise-to-signal ratios and peak values. For example, the threshold needed to be lower than the peak but higher than the noise.
Figure 12 shows the real-time pitch, rotor speed, thrust, and torque.
Figure 13 shows the values for the metrics for the thrust, torque, and rotor speed. In
Figure 13, there was no settling time for the numerical results for torque, because the overshoot in torque from the simulations was negligible.
5.3.3. LC 3.3 and 3.5: Steady and Spectral Wind
These load cases focused on the steady wind condition around the transition region (12.83 m/s) with different turbulence characteristics. LC 3.3 examined the natural freestream turbulence characteristics (rotor-averaged turbulence intensity of 4.49%) and LC 3.5 employed a manufactured Kaimal turbulence spectrum. The Kaimal turbulence spectrum was created using TurbSim based on the IEA wind 15 MW full-scale conditions and the IEC 61400-1 third Ed. standard. The resulting time history was Froude-scaled and then upscaled by a factor of 1.2 (due to the 20% increase in wind speed; see
Section 2.2). Finally, this modified time history was used to define the fan setpoints in the basin. The metrics were given in terms of mean and standard deviation, and the WEIS team explored how different turbulence modeling approaches affected the torque and thrust (see details below). For these two load cases, the experimental pitch was shown to be completely saturated.
In
Figure 14, there were four sets of WEIS results, each with a different turbulence model:
Uniform: This model used the time history of the experimental wind speed at hub height as the wind speed across the entire simulation domain, thereby generating a uniform wind field.
Spatially coherent: This model used the time history of the experimental wind speed at hub height in combination with TurbSim to generate a new wind field with spatially coherent turbulence across the domain (based on the spatial coherence functions defined for the Kaimal in the IEC 61400-1 design standard). Because only one point was used to seed this turbulence field, it deviated significantly at other radial and azimuth locations in the rotor plane.
Spectrum: An FFT of the time history of the experimental wind speed at hub height was performed and then scaled to match the rotor-averaged turbulence intensity of 4.49%. The frequency content and power spectral density were generated and used to create a new time series using random phasing that was spatially uniform across the domain.
TI (turbulence intensity): This model used the experimentally measured, rotor-averaged mean wind speed (12.83 m/s) and turbulence intensity (4.49%) to generate the input wind field. A Kaimal spectrum with the same TI as the experimental data was generated and used to create a new time series using random phasing that was spatially uniform across the domain.
All other participants used the uniform turbulence model. Metrics for these load cases were computed as the mean wind speed and standard deviation (2σ) about this mean (shown in red bars, which were twice the standard deviations encompassing 95% of the temporal fluctuations), as illustrated in
Figure 14. The WEIS uniform results were the most consistent with the other numerical tools and yielded the closest values to the experiment, so this approach is recommended.
Figure 14.
LC 3.3 and LC 3.5 metrics for (a) pitch, (b) rotor speed, (c) thrust, and (d) torque. Red error bars indicate twice the standard deviation about the mean.
Figure 14.
LC 3.3 and LC 3.5 metrics for (a) pitch, (b) rotor speed, (c) thrust, and (d) torque. Red error bars indicate twice the standard deviation about the mean.
5.3.4. LC 3.4: Sinusoidal Wind
LC 3.4 employed a sinusoidally varying wind to mimic the global pitching motion of the floating system to evaluate the turbine loads and the corresponding controller response. The sinusoid that described the variation in the experimental wind speed (first harmonic) was:
where
A = 0.68 m/s,
f = 0.036 Hz, and
φ is the phase shift.
The pitch was saturated for most of the run; thus, the controller responded primarily through the rotor speed. In addition, the frequency content (spectra) could be analyzed through frequency response functions (FRFs). The FRFs for the thrust, torque, and rotor speed are illustrated in
Figure 15. In the figure, the amplitudes of the WEIS-coherent results were small because the variation across the rotor of the coherent turbulence was on the same level as the variation of the sinusoidal wind speed.


 ,
, 



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}