This section presents response amplitude operator (RAO) motions for heave and pitch. Additionally, the RAO of the strains at the tower base around the Y axis and deck around the Y axis are discussed. The RAOs were calculated under regular wave tests. Two main factors were analyzed to verify their effects on the dynamic behavior in regular waves of FOWT: first, the influence of the wave height, and second, the geometry of the heave plates.
Three methodologies were used to obtain RAOs: experimental tests in a wave tank, numerical simulations using NK-UTWind code, and numerical simulations using WAMIT code. Moreover, comparisons between the methodologies were presented and compared to validate the numerical calculations.
Numerical calculations using the NK-UTWind code were evaluated using the same wave height values carried out in the tank experiments. However, the numerical calculations by the WAMIT code were calibrated using different levels of linear damping to match the same RAO peak values around the respective natural period. WAMIT code uses potential linear theory to obtain the hydrodynamic forces and the RAO.
4.2.1. Influence of the Wave Height
As observed in the former research [
18], a small peak before 2.0 s could be observed in the RAO results due to the elastic vibration mode observed. In this period, the swinging motion of columns due to the significant deformation of decks was observed, as shown in
Figure 10.
Figure 11,
Figure 12 and
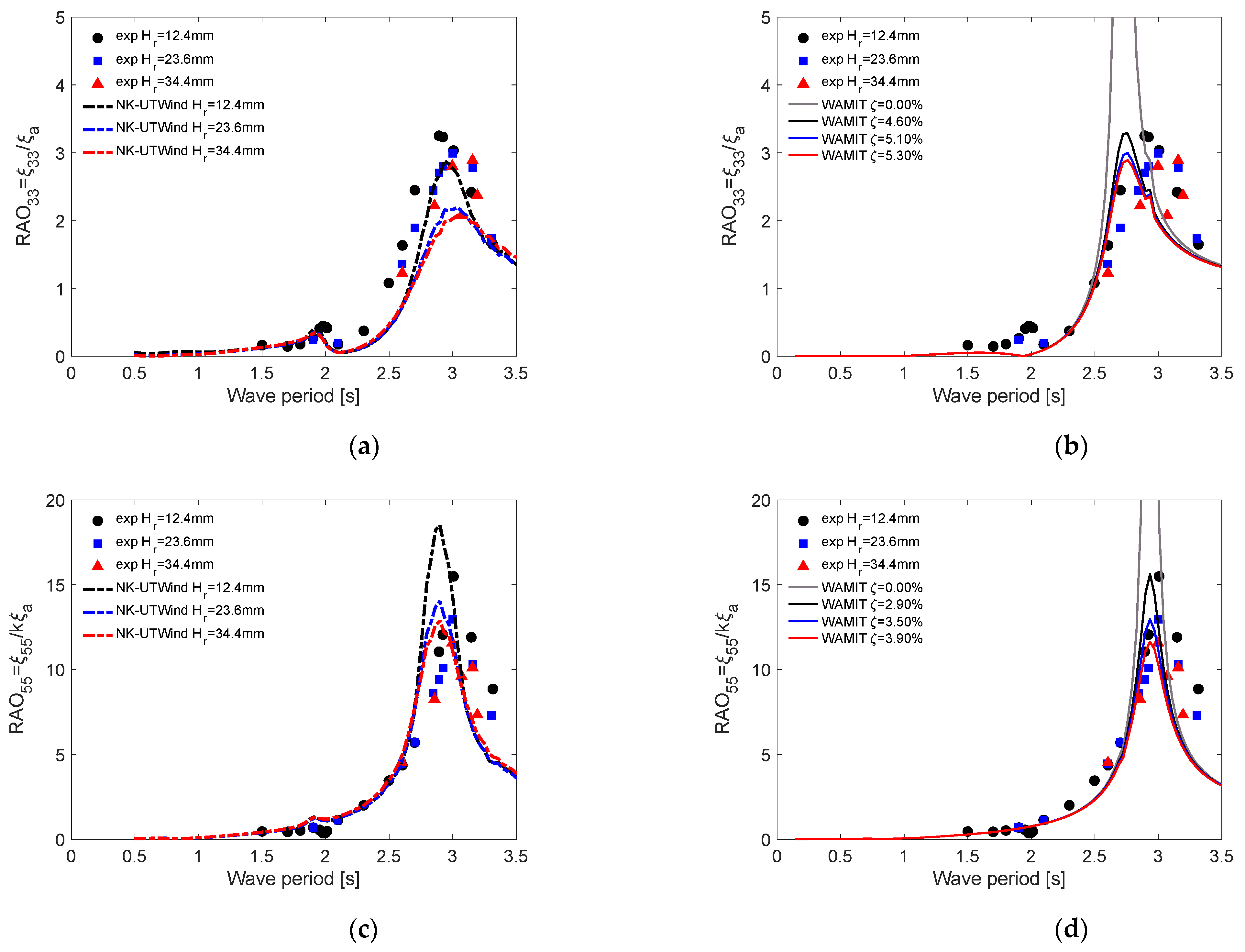
Figure 13 compares the RAO results between the experiments for different wave heights and numerical calculations for the Sphere, Plate, and Semi-spheroid models, for heave and pitch motions.
In general, it is possible to observe a decrease in the peak value of the RAO heave around the natural periods when increasing the wave height. This fact was related to the high damping values for high wave heights, which confirmed the pronounced quadratic (non-linear) behavior of the viscous damping, see
Table 7.
The numerical results from the NK-UTWind code agreed well with the experiments, and the RAO curve and natural periods trend were similar. In the resonance region, the RAO values are very sensitive to the damping levels. The results showed that the damping level from NK-UTWind, provided mainly by the drag coefficients in the Morison equations, was higher than in the experiments. The discretization in nodes, i.e., slices of circular cylinders of the footing region, see
Figure 6a, could provide more damping than the experimented case, decreasing the RAO results’ peak value. NK-UTWind code obtained the RAO peak before 2.0 s due to the elastic response mode.
The numerical results from the WAMIT code agreed well with the experiments, and the trend of RAO curves was well represented in all cases. The non-linear behavior due to the elastic modes of the FOWT was not observed as in experiments and NK-UTWind simulations. The natural periods were consistently lower than the experimental and NK-UTWind ones due to the added mass calculated by the potential theory being lower than the real one. The lower added mass may be explained due to the complex footing region geometry and the pronounced detachment of the flow in plate edges, for example, as in the Plate and Semi-spheroid model. The high viscous damping value in heave plate configurations corroborated the previous statement.
Figure 11a,c show the comparisons for the calculations using the NK-UTWind code, and
Figure 11b,d show the comparative results for the numerical calculations by the WAMIT code for the Sphere model.
In the experimental RAO heave and pitch results for the Sphere model, high values of peak RAO were observed to be much larger than usual. The high values occurred because the damping level, see linear damping coefficients calibrated in WAMIT, was close to 1.0% of the critical value, thus lower than the typical values of 5% presented in offshore platforms, see [
36]. The footing region as a sphere shape worked as planned and provided as less as possible damping to the system, and even in an increase of three times the wave height, the damping level ranged from 1.0% to 1.4%.
Figure 12a,c show the comparisons for the calculations using the NK-UTWind code, and
Figure 12b,d show the comparative results for the numerical calculations by the WAMIT code for the Plate model.
In the experimental RAO heave and pitch results for the Plate model, lower values of peak RAO were observed than in the Sphere model. The lower values occurred because the damping level was close to 6.5% and 4.1% for heave and pitch motions, respectively. The footing region as a sphere with a plate worked as planned and provided a significant damping level of viscous damping to the system, i.e., around three times higher than the Sphere case.
Figure 13a,c show the comparisons for the calculations using the NK-UTWind code, and
Figure 13b,d show the comparative results for numerical calculations by the WAMIT code for the Semi-spheroid model.
The Semi-sphere model was designed to have a larger added mass than the Sphere one; however, the damping level should be lower than the Plate one. The added mass was larger than in the Sphere model; see the larger natural periods, as expected. Moreover, lower values of damping levels, around 5.1% and 3.5% for the heave and pitch motions, respectively, than in the Plate model. The footing region as a semi-spheroid attached to the plate worked as planned and provided as much added mass as the Plate model, however, with a lower damping level.
Strain RAOs at the tower base and the deck, both around the Y axis, were presented to discuss the inner forces, as shown in
Figure 14.
In
Figure 14a,b, the RAO strain at the tower base and deck presented a peak around 2.5 s that corresponded to the natural period of pitch, which indicated that the bending strain due to the pitch motion of the nacelle was dominant in the bending of the tower, for the Sphere model. The NK-UTWind simulations showed a slight difference in the magnitude of the response, but it was underestimated compared to the experiment. The difference may be due to the more significant Rayleigh damping coefficients for the structural stiffness in the NK-UTWind simulations.
Figure 14c,d showed the RAO of strains for the Plate model at the tower base and deck around the Y axis, respectively.
For the RAO strain at the tower base, the peak around 2.7 s corresponded to the natural period of the pitch. The peak height was about 20% that of the Sphere model, which the lower response of pitch motion can explain. In NK-UTWind, a small peak was observed at the Eigen period of the elastic mode. However, the peak value was smaller in the experiment. At the deck, the period of the peak in the experiment corresponding to the Eigen period of the elastic mode, 1.78 s, and the NK-UTWind were in good agreement with the experiment.
Figure 14e,f show the RAO of strains for the Semi-spheroid model at the tower base and deck around the Y axis, respectively.
For strains at the tower base, the experiment had a peak around 2.95 s, the natural period of the pitch motion, which was in good agreement with the NK-UTWind simulations. As seen in the Plate model, the simulation shows a small peak at the Eigen period of the elastic mode. For the strain at the deck, the period of the peak in the experiment corresponds to the Eigen period of the elastic mode, 1.92 s, and NK-UTWind was also in good agreement with the experiment.
4.2.2. Influence of Heave Plates
This section intends to show the effects of the heave plate configurations on the hydrodynamic behavior of the FOWT; thus, the differences in added mass, damping, and RAO results will be presented. Only the results obtained from the medium regular wave height were utilized for natural periods and RAO comparisons. All the wave heights were also considered for linear damping to show the wave height effects.
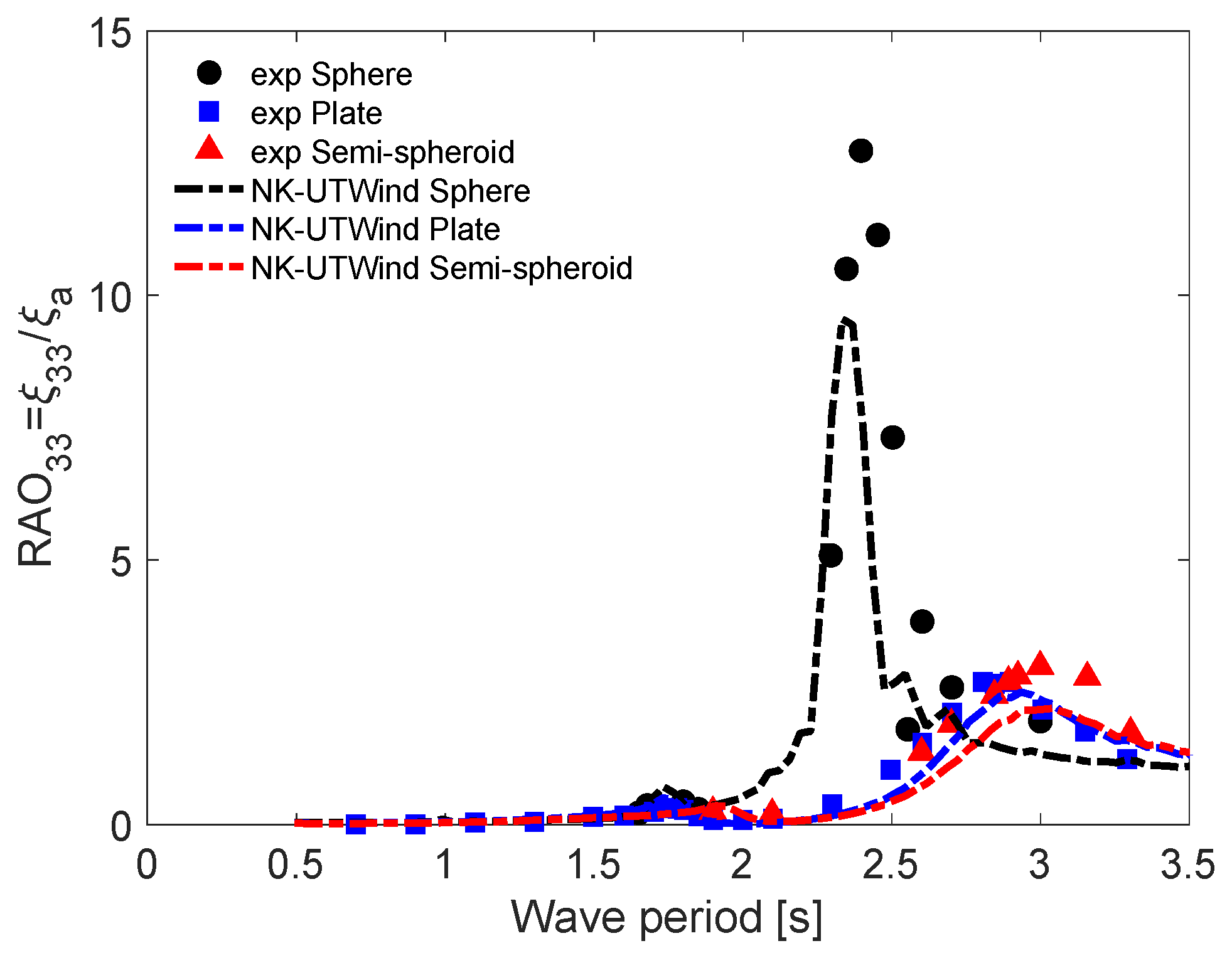
Table 9 summarizes the results of natural periods obtained from the peak of the RAO results for the experiments and numerical simulations previously discussed. The difference between the experimental and numerical calculations was lower than 3% and 7% for the NK-UTWind and WAMIT codes, respectively. The increased added mass in the Plate and Semi-spheroid models for heave and pitch motions is apparent. The geometry of the heave plate added in the Plate model was responsible for the largest increase in the added mass. Moreover, a smaller increase in the added mass also occurred when adding the semi-spheroid geometry in the Semi-spheroid model.
Table 10 summarizes the results of the linear damping coefficients obtained from the WAMIT code RAO results previously discussed. Again, the linear damping for the Plate model was higher than for the Sphere one; the increase in damping was due to flow separation and vortex shedding at the edges of the plate. However, the damping for the Semi-spheroid model was lower than the Plate model and higher than the Sphere one; the attachment of the semi-spheroid geometry avoids an abrupt separation of the flow around the edges of the plate, thus decreasing the damping levels.
Figure 15 and
Figure 16 consolidate the RAO motion results for medium wave height and different heave plate configurations for heave and pitch motions, respectively. In these results, it was possible to observe the effect of the heave plate on the response of the FOWT.
Although there were differences in the RAO results, as seen in
Figure 15 and
Figure 16, the heave plate configurations must be considered when designing a FOWT model. In addition, spectral analysis of the heave and pitch motions may result in significant amplitudes under an actual ocean environment. Therefore, a discussion can be undertaken to verify heave plate influence on the heave and pitch motions statistics under operational, storm, and centenary sea conditions. The three conditions were selected as the typical values encountered around the Japanese coast. The sea conditions are characterized by significant wave height,
, and wave period of peak,
, and are presented in
Table 11.
The heave and pitch response spectrum for three different models and three different sea conditions were performed. For the wave spectrum, the ISSC spectrum, see [
37], was considered as:
where
,
,
and
is the peak frequency of the wave spectrum.
The power spectrum of heave and pitch motion response,
and
can be calculated as:
The variance in the heave motion in these wave conditions was estimated from the 0th moment of the heave response spectrum
, and pitch response spectrum
are calculated as:
Then, the significant response of heave and pitch are evaluated as 4
and 4
, respectively. These results for all the models are listed in
Table 12.
In the former research [
18], the flexible models showed a considerable heave response 1.8 times larger than the rigid ones. Based on this fact, assuming that the present flexible models were exposed to a real condition, as presented in
Table 11, the spectral crossing results showed a significant height motion decrease of around 33% for the model with a heave plate for the operational condition. Moreover, the decline was about 66% for the storm and centenary conditions. Therefore, the spectral crossing results in
Table 12 corroborate the importance of considering heave plates when designing multicolumn FOWTs.


 ,
, 

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}