
Modeling of Direct-Drive Permanent Magnet Synchronous Wind Power Generation System Considering the Power System Analysis in Multi-Timescales


Abstract
:1. Introduction
- (i)
- Identifying the dominated active controls in a serial of timescales by means of parameter sensitivity analysis.
- (ii)
- Proposing a set of D-PMSG simplified models with different complexity in line with the parameter sensitivity analysis for the different purpose of the power system dynamic analysis.
- (iii)
- Defining the use case of the D-PMSG simplified models for the transient stability, voltage stability, and frequency stability analysis, respectively.
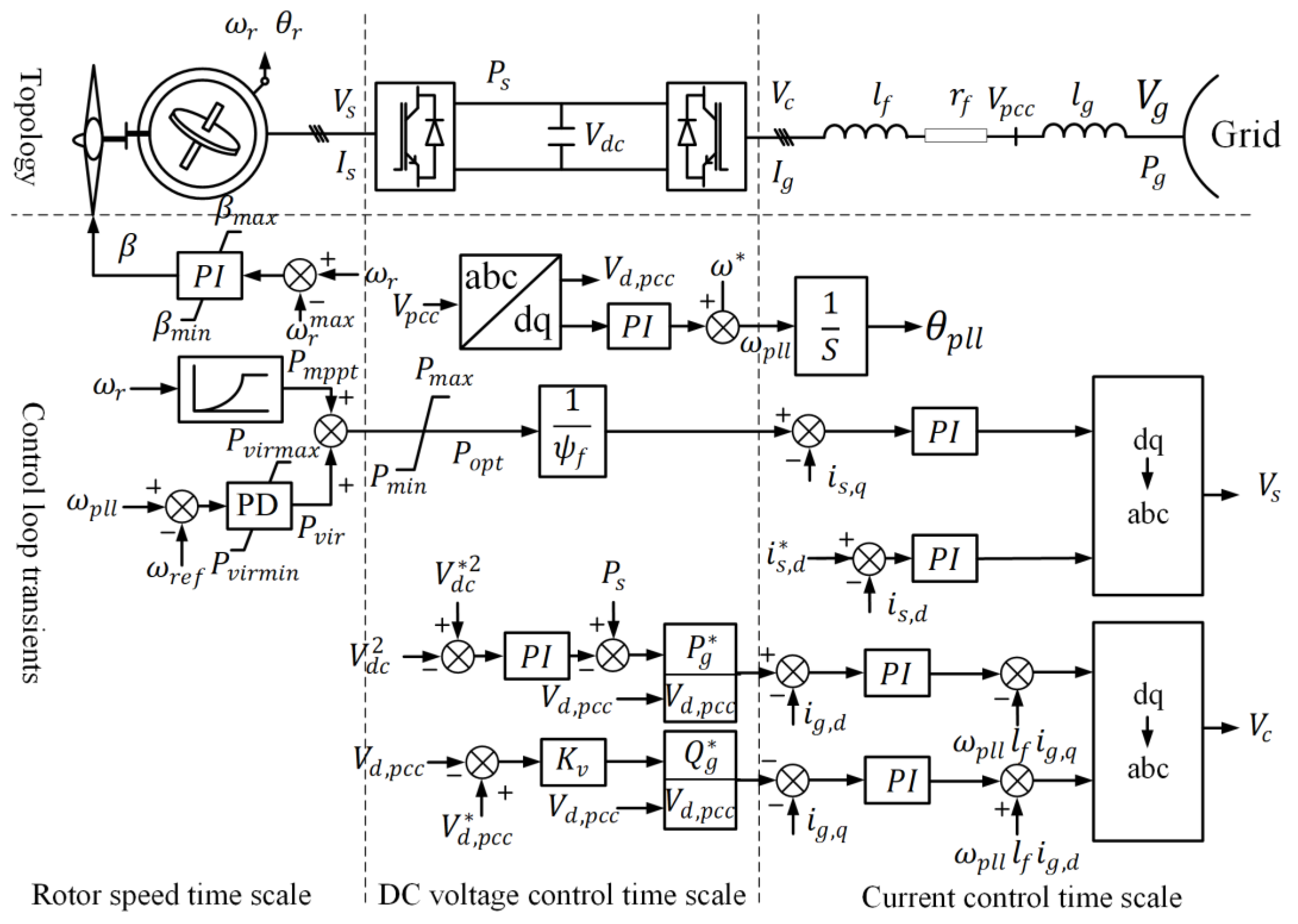
2. Modelling of the D-PMSG
2.1. Mechanical Model
2.2. Full Power Converter Model
2.3. Control System Model
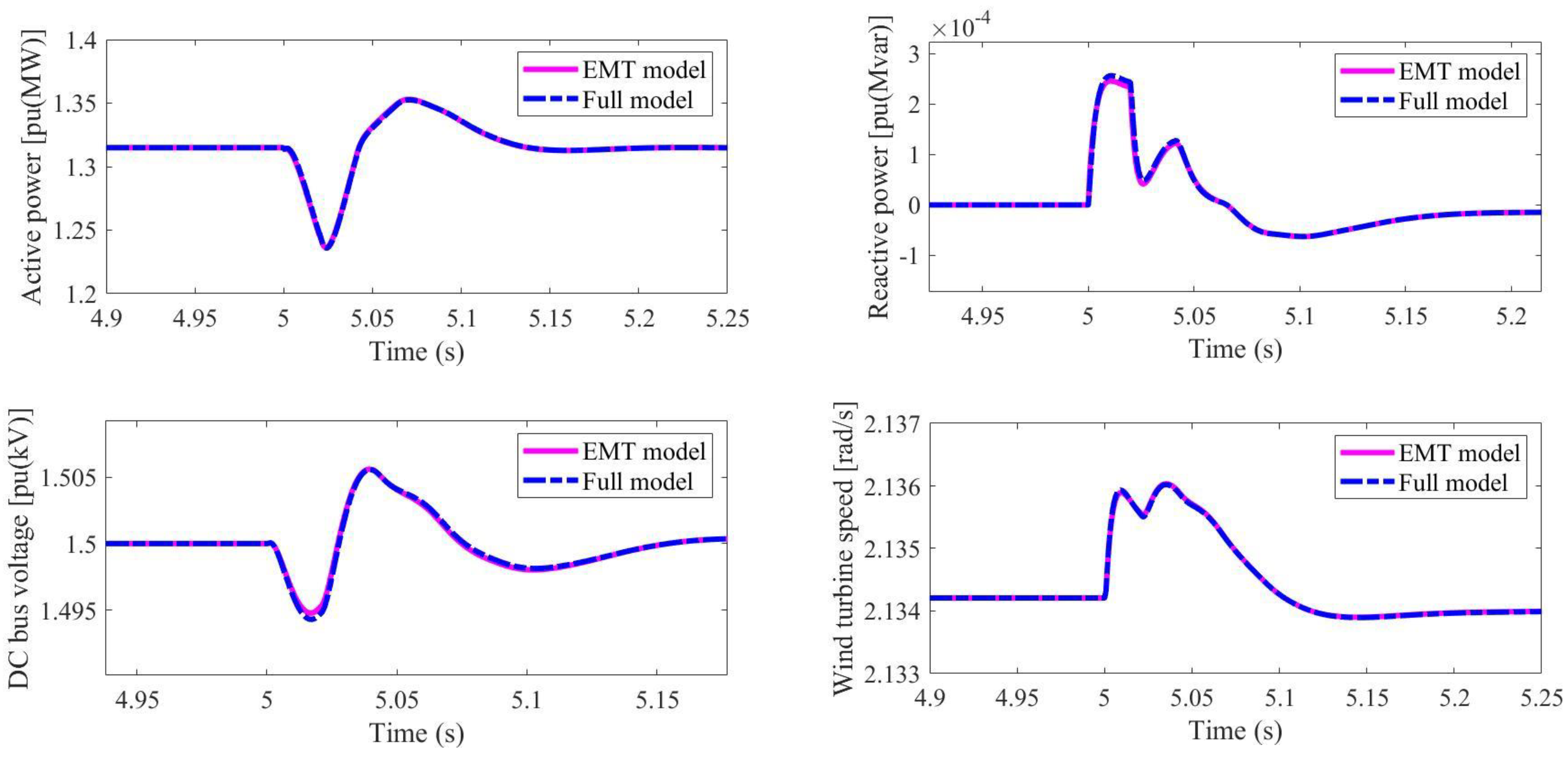
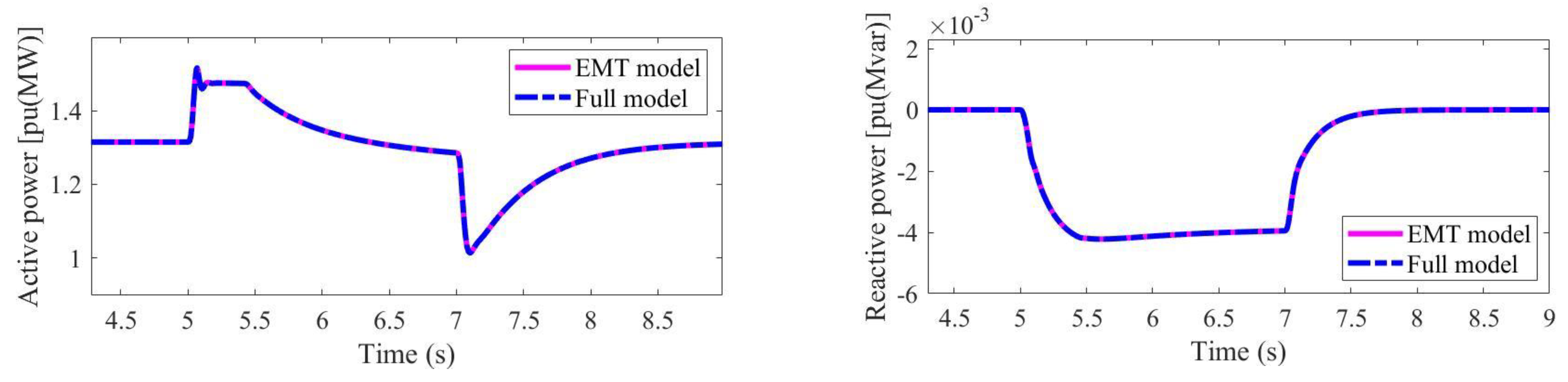
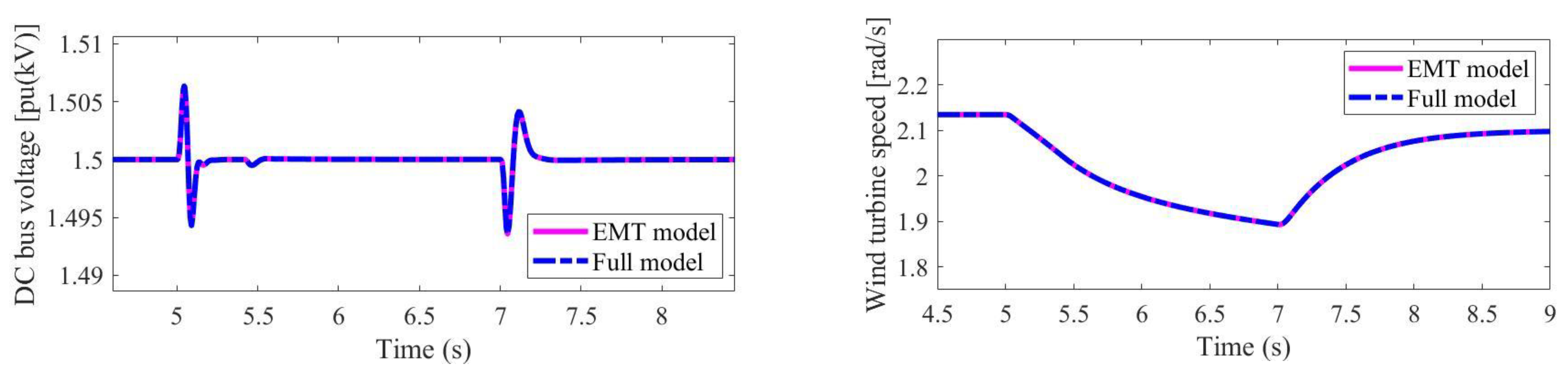
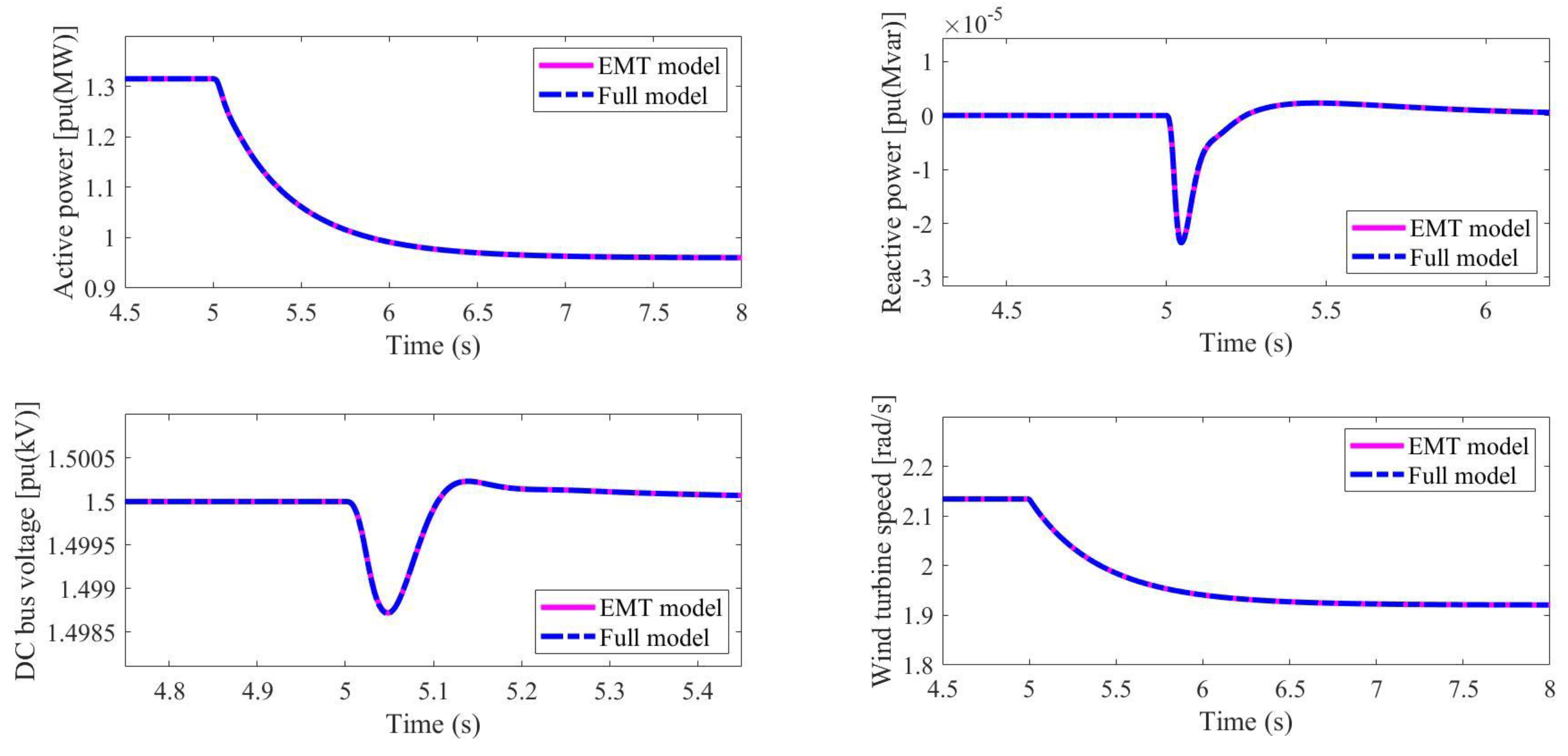
2.4. Model Validation via Simulation
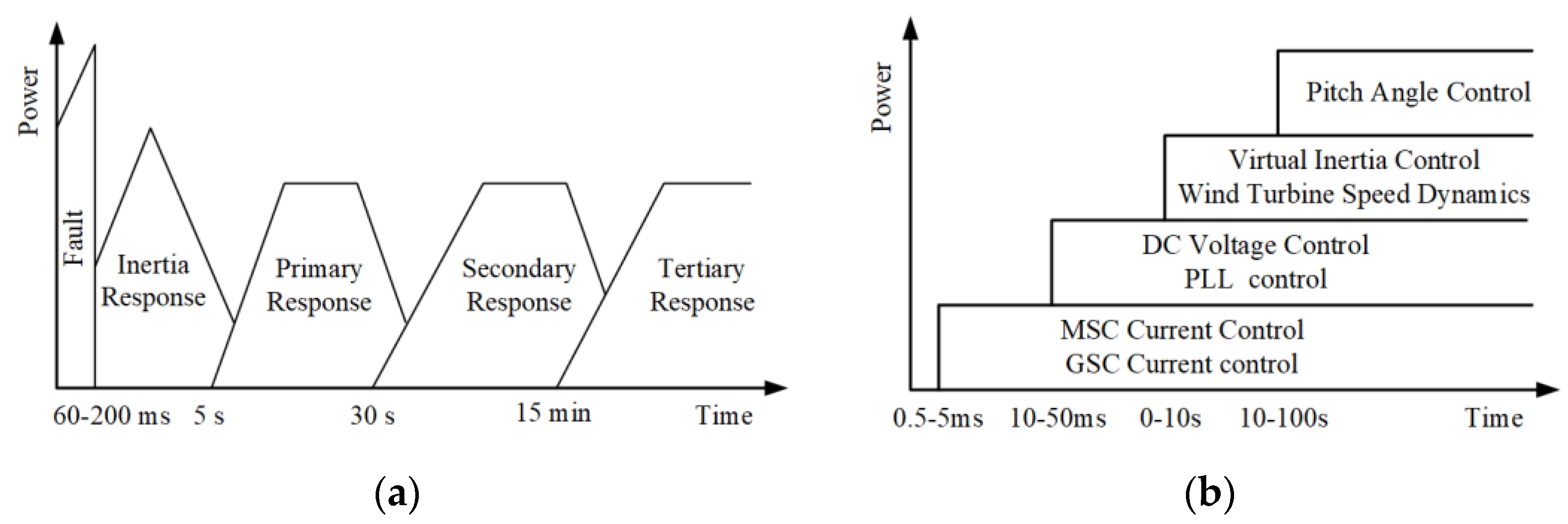
3. Approximated D-PMSG Models
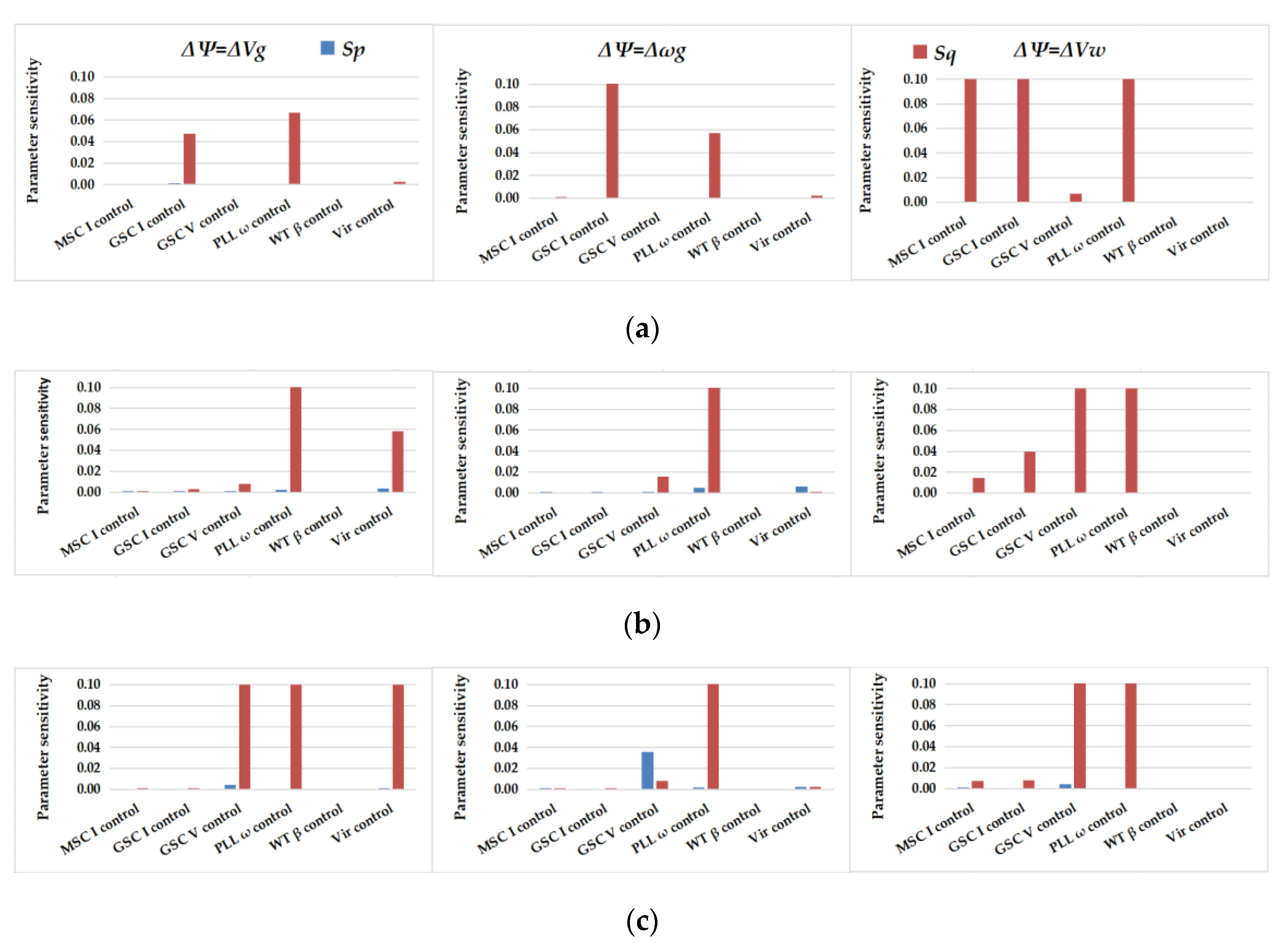
3.1. Parameter Sensitivity
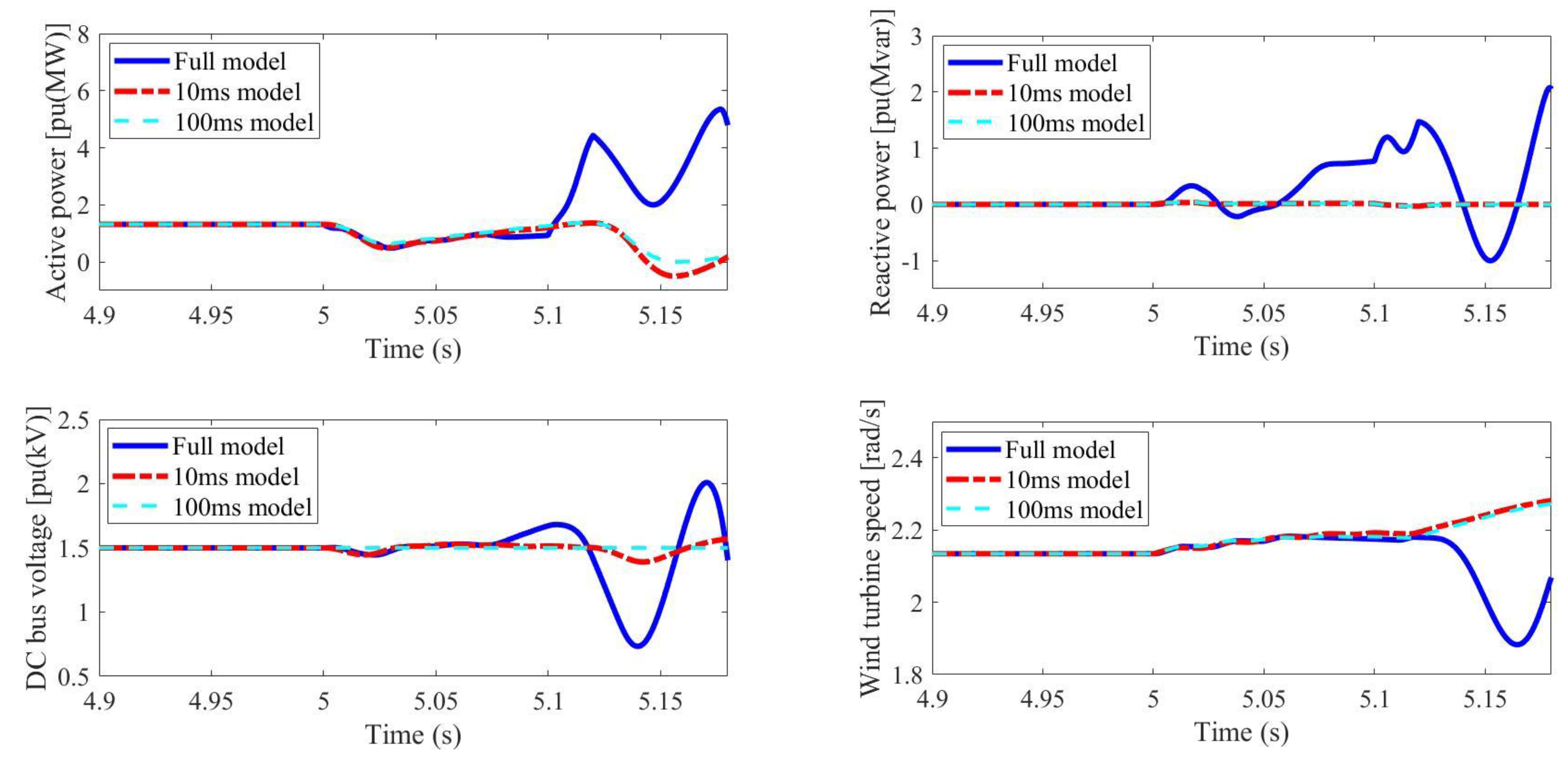
3.2. 10 ms Model
3.3. 100 ms Model
3.4. Summary
4. Use Cases
4.1. Fault Response
4.2. Frequency Event
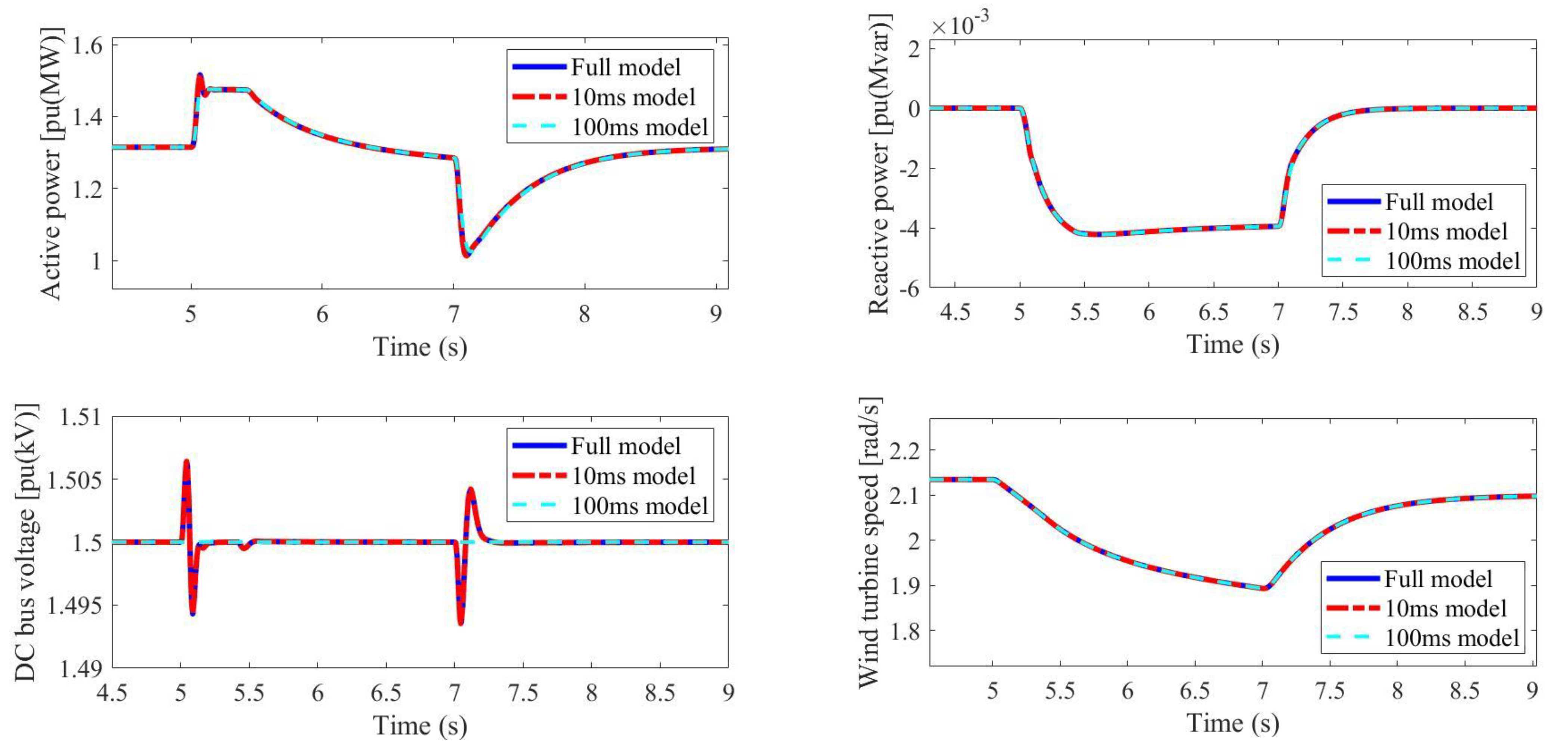
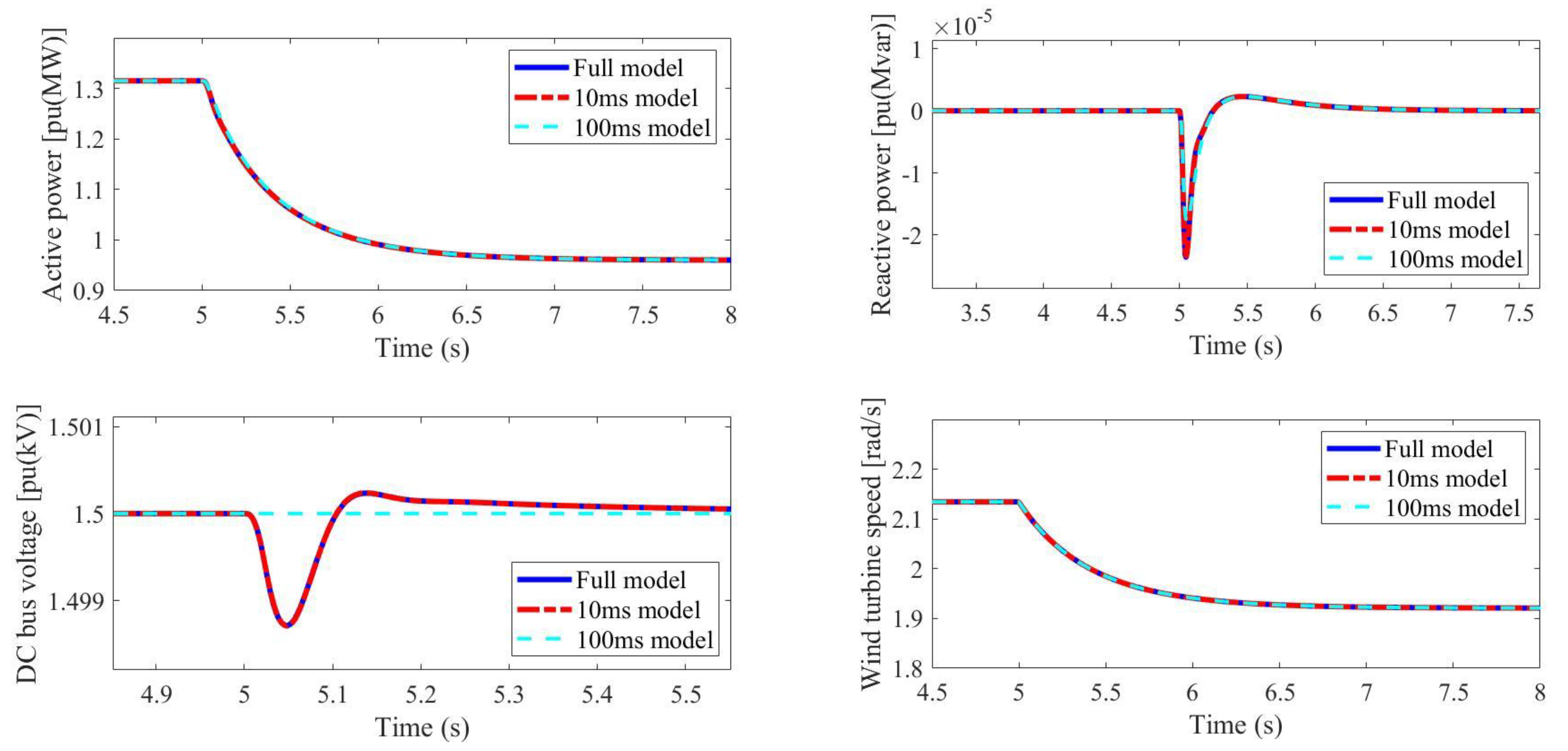
4.3. Wind Speed Event
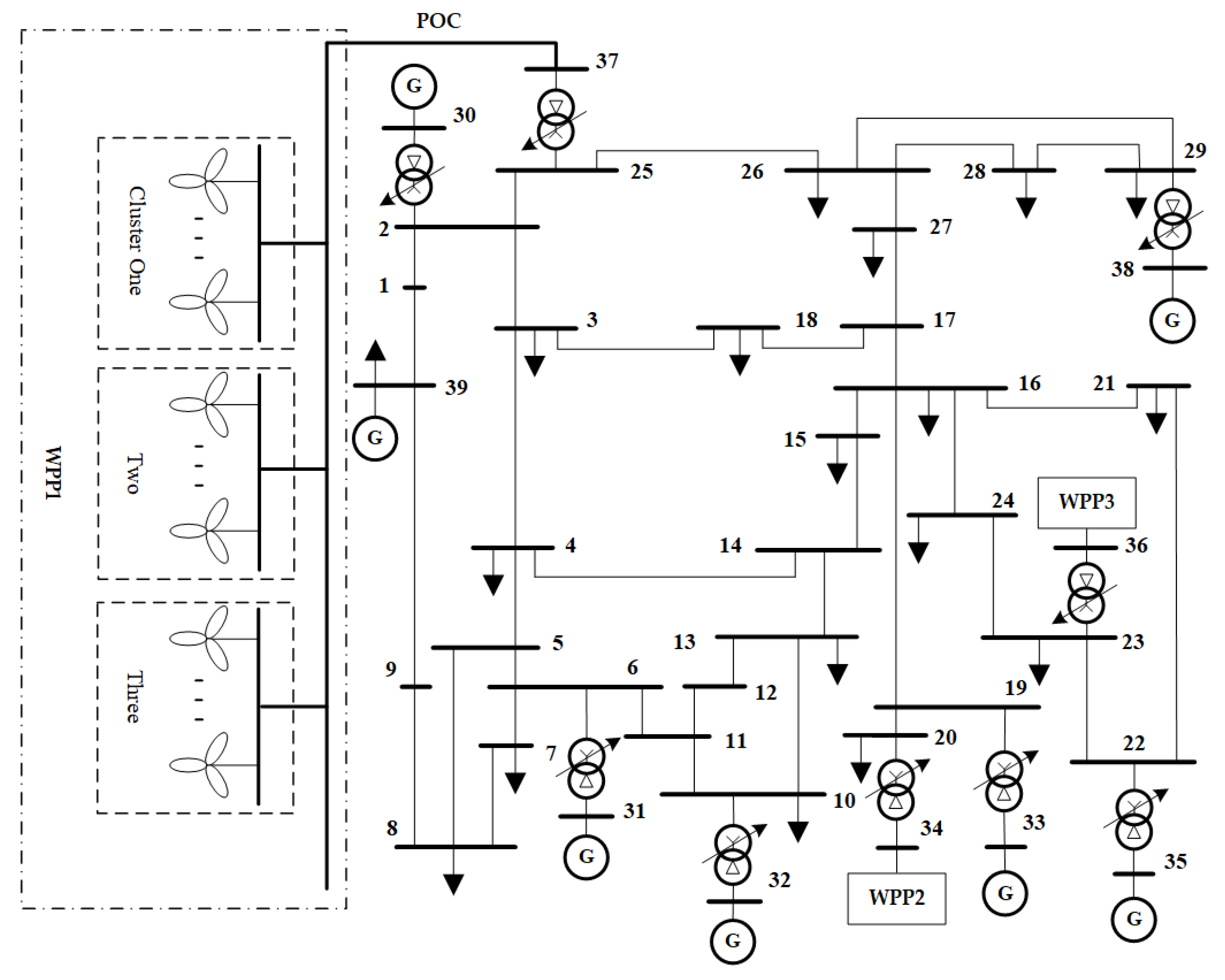
5. Case Study
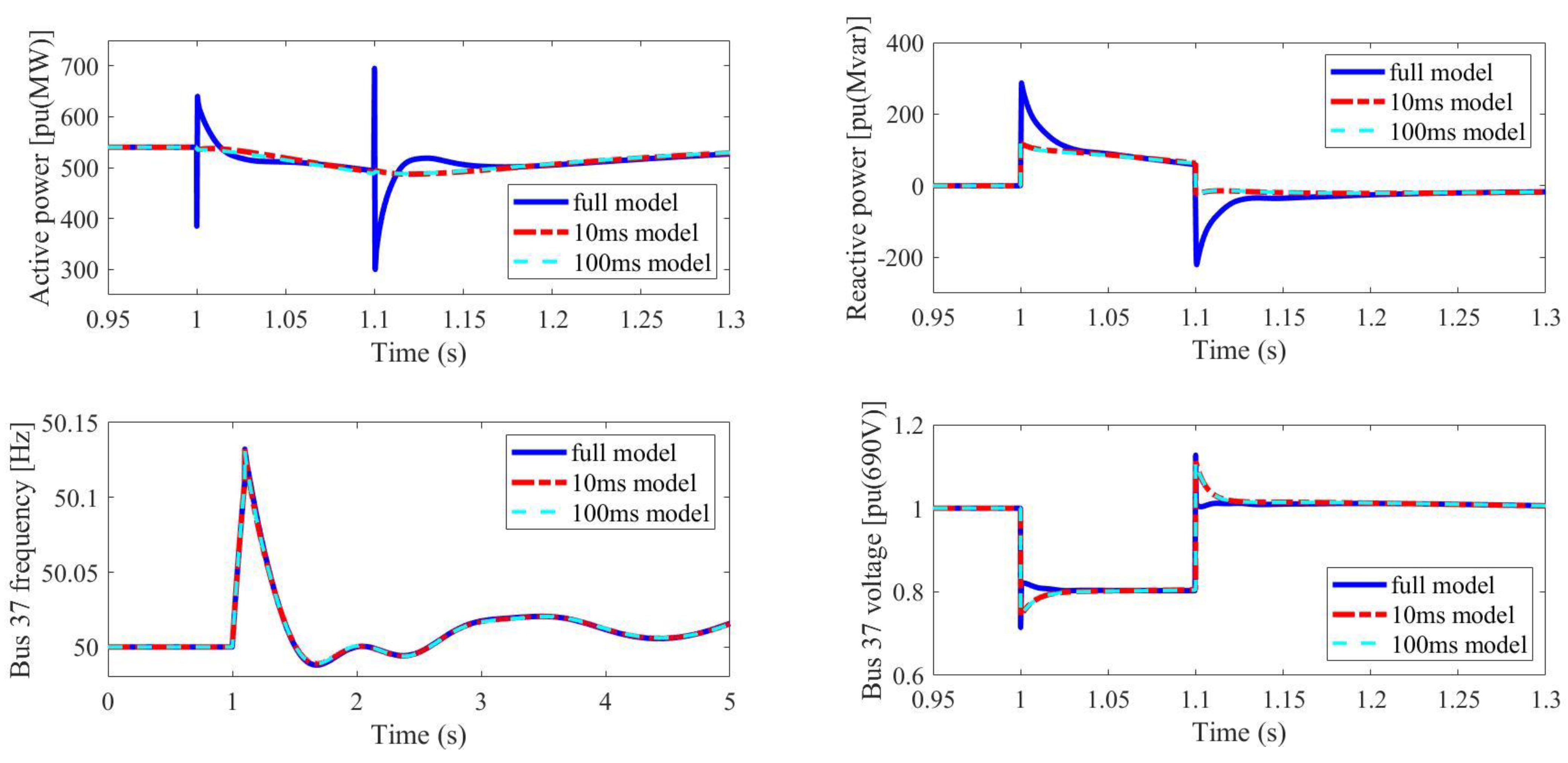
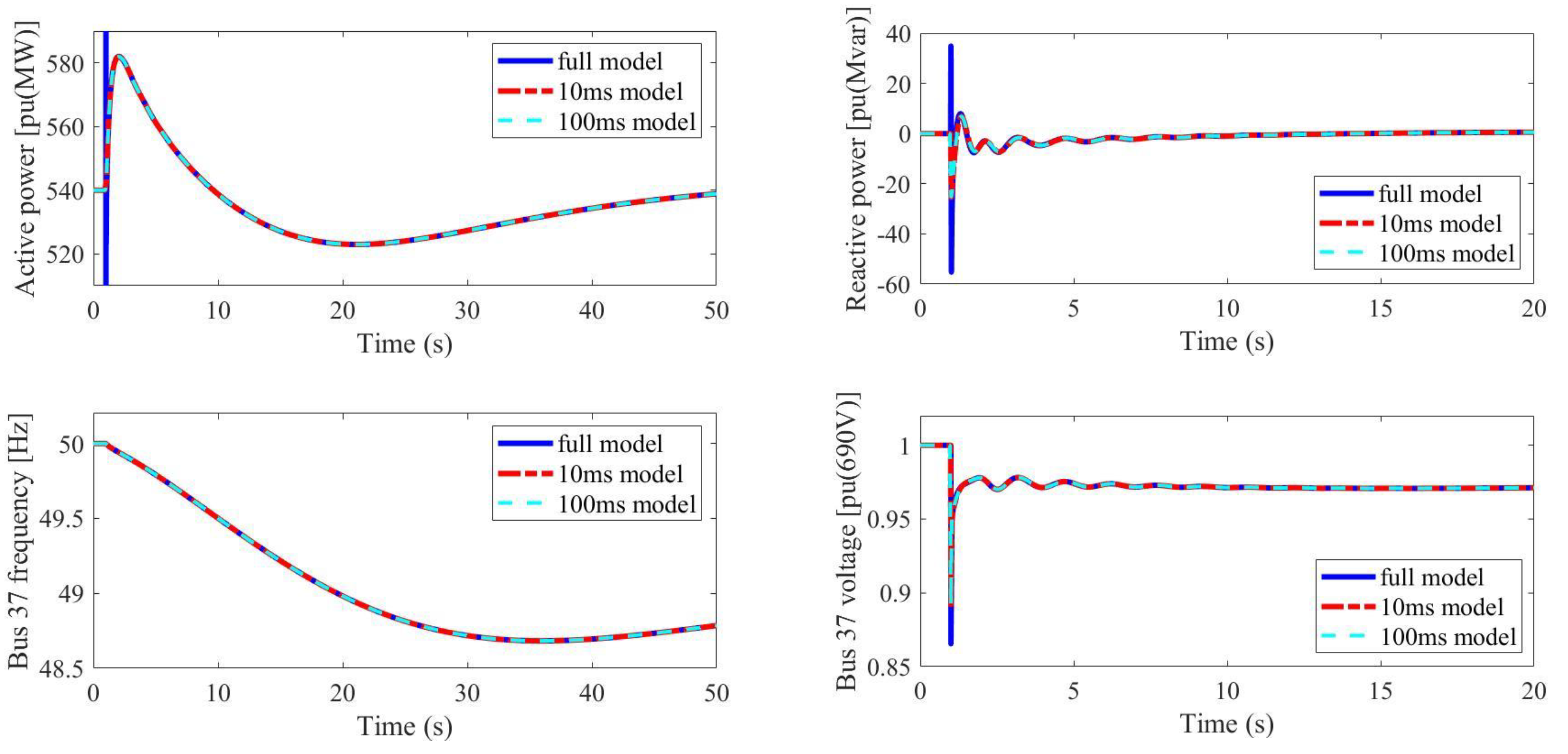
5.1. Scenario 1: Fault
5.2. Scenario 2: Generator Outage
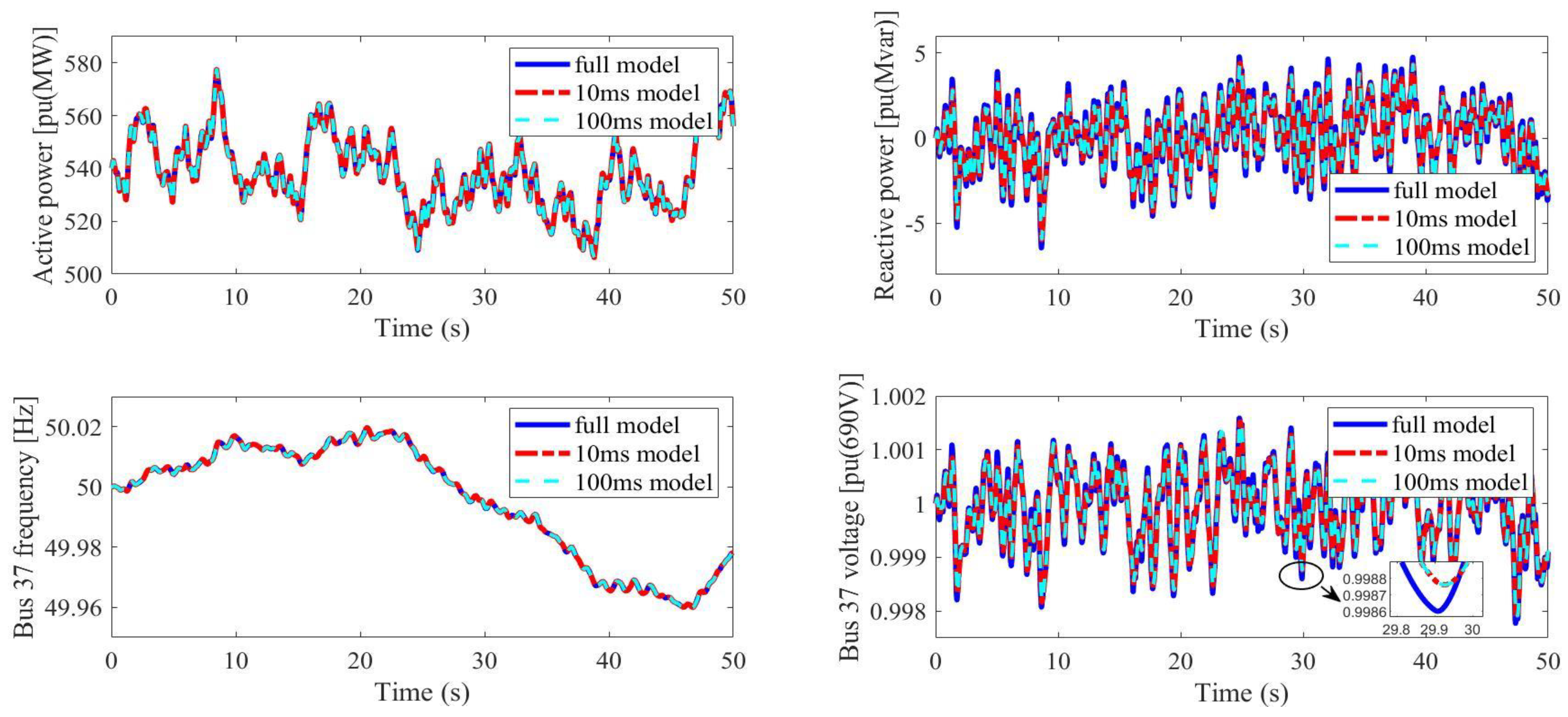
5.3. Scenario 3: Variable Wind Speed
6. Conclusions
- In new power systems, the full D-PMSG model must be used for the transient stability or rotor angle stability analysis. The 10 ms model can be used for the voltage stability analysis on both the DC and AC sides. The 100 ms model can fit into the frequency and voltage stability analysis but only on the AC sides.
- For the power system simulation, using D-PMSG 100 ms model can significantly reduce the computation burden while maintaining greater accuracy for the power system dynamic analysis. While for the grid fault or short-circuit analysis, a full D-PMSG model is still needed. In a modified IEEE 39-bus system simulation with 26.2% D-PMSG penetration, using the 100 ms model can save 96.77% of the computational burden in comparison with using the full model.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
Notations
| Notation | Description |
| WT blade radius | |
| Wind speed | |
| Air density | |
| Pitch angle/its reference | |
| Pitch angle limitation | |
| Area swept by wind turbines | |
| Equivalent rotational inertia | |
| Equivalent damping factor | |
| Number of permanent magnet pole pairs | |
| Magnetic flux of permanent magnets | |
| PMSG stator winding resistance/inductance | |
| GSC filter resistance/inductance | |
| Capacitance of DC bus filter | |
| Grid/PLL/nominal frequency | |
| Grid/PLL phase | |
| Rotor angle frequency/its maximum value | |
| PMSG Stator winding current/its reference | |
| GSC current/its reference | |
| MSC outlet voltage | |
| GSC outlet voltage | |
| DC bus/PCC/grid voltage | |
| Wind turbine/maximum power point/auxiliary power | |
| Auxiliary power limitation | |
| PMSG power limitation | |
| PMSG power | |
| GSC power reference | |
| MSC power/torque reference | |
| Mechanical/electromagnetic torque | |
| Virtual inertia proportional/differential gain | |
| Reactive power compensation gain | |
| Pitch angle controller P/I | |
| MSC current controller P/I | |
| GSC current controller P/I | |
| GSC voltage controller P/I | |
| PLL parameter P/I |
References
- Sun, C.; Chen, J.; Tang, Z. New Energy Wind Power Development Status and Future Trends. In Proceedings of the 2021 International Conference on Advanced Electrical Equipment and Reliable Operation (AEERO), Beijing, China, 15–17 October 2021; pp. 1–5. [Google Scholar]
- Padmanathan, K.; Kamalakannan, N.; Sanjeevikumar, P.; Blaabjerg, F.; Holm-Nielsen, J.B.; Uma, G.; Arul, R.; Rajesh, R.; Srinivasan, A.; Baskaran, J. Conceptual Framework of Antecedents to Trends on Permanent Magnet Synchronous Generators for Wind Energy Conversion Systems. Energies 2019, 12, 2616. [Google Scholar] [CrossRef] [Green Version]
- Chinchilla, M.; Arnaltes, S.; Burgos, J.C. Control of Permanent-magnet Generators Applied to Variable-speed Wind-energy Systems Connected to the Grid. IEEE Trans. Energy Conver. 2006, 21, 130–135. [Google Scholar] [CrossRef] [Green Version]
- Yin, M.; Li, G.; Zhou, M.; Zhao, C. Modeling of the Wind Turbine with a Permanent Magnet Synchronous Generator for Integration. In Proceedings of the 2007 IEEE Power Engineering Society General Meeting, Tampa, FL, USA, 24–28 June 2007; pp. 1–6. [Google Scholar]
- Ebrahimzadeh, E.; Blaabjerg, F.; Wang, X.; Bak, C.L. Harmonic Stability and Resonance Analysis in Large PMSG-Based Wind Power Plants. IEEE Trans. Sustain. Energ. 2018, 9, 12–23. [Google Scholar] [CrossRef]
- Li, J.; Yang, J.; Xie, X.; Li, H.; Wang, K.; Shi, Z. The effect of different models of closed-loop transfer functions on the inter-harmonic oscillation characteristics of grid-connected PMSG. CSEE J. Power Energy Syst. 2020, 1–8. [Google Scholar] [CrossRef]
- Xie, D.; Lu, Y.; Sun, J.; Gu, C. Small Signal Stability Analysis For Different Types of PMSGs Connected to the Grid. Renew. Energ. 2017, 106, 149–164. [Google Scholar] [CrossRef]
- Du, W.; Dong, W.; Wang, H.F. Small-Signal Stability Limit of a Grid-Connected PMSG Wind Farm Dominated by the Dynamics of PLLs. IEEE Trans. Power Syst. 2020, 35, 2093–2107. [Google Scholar] [CrossRef]
- Cui, Y.; Zeng, P.; Cui, C. Pitch Control Strategy of Permanent Magnet Synchronous Wind Turbine Generator in Response to Cluster Auto Generation Control Command. In Proceedings of the 2019 IEEE Innovative Smart Grid Technologies-Asia (ISGT Asia), Chengdu, China, 21–24 May 2019; pp. 4042–4047. [Google Scholar]
- Alizadeh, O.; Yazdani, A. A Strategy for Real Power Control in a Direct-Drive PMSG-Based Wind Energy Conversion System. IEEE Trans. Power Deliver. 2013, 28, 1297–1305. [Google Scholar] [CrossRef]
- Bouscayrol, A.; Delarue, P.; Guillaud, X. Power strategies for maximum control structure of a wind energy conversion system with a synchronous machine. Renew. Energ. 2005, 30, 2273–2288. [Google Scholar] [CrossRef]
- Esmaili, R.; Xu, L.; Nichols, D.K. A new control method of permanent magnet generator for maximum power tracking in wind turbine application. In Proceedings of the IEEE Power Engineering Society General Meeting, San Francisco, CA, USA, 16 June 2005; pp. 2090–2095. [Google Scholar]
- Qin, S.; Chang, Y.; Xie, Z.; Li, S. Improved Virtual Inertia of PMSG-Based Wind Turbines Based on Multi-Objective Model-Predictive Control. Energies 2021, 14, 3612. [Google Scholar] [CrossRef]
- Morren, J.; De Haan, S.W.; Kling, W.L.; Ferreira, J.A. Wind turbines emulating inertia and supporting primary frequency control. IEEE Trans. Power Syst. 2006, 21, 433–434. [Google Scholar] [CrossRef]
- Keung, P.-K.; Li, P.; Banakar, H.; Ooi, B.T. Kinetic Energy of Wind-Turbine Generators for System Frequency Support. IEEE Trans. Power Syst. 2009, 24, 279–287. [Google Scholar] [CrossRef]
- He, X.; Geng, H.; Mu, G. Modeling of wind turbine generators for power system stability studies: A review. Renew. Sust. Energ. Rev. 2021, 143, 110865. [Google Scholar] [CrossRef]
- Chen, W.; Wang, D.; Xie, X.; Ma, J.; Bi, T. Identification of modeling boundaries for SSR studies in series compensated power networks. IEEE Trans. Power Syst. 2017, 32, 4851–4860. [Google Scholar] [CrossRef]
- Shi, Q.; Wang, F.; Fu, L.; Yuan, L.; Huang, H. State-space averaging model of wind turbine with PMSG and its virtual inertia control. In Proceedings of the IECON 2013-39th Annual Conference of the IEEE Industrial Electronics Society, Vienna, Austria, 10–13 November 2013; pp. 1880–1886. [Google Scholar]
- Shen, Y.; Zhang, J.; Chen, Y.; Pi, A.; Mao, X.; Wang, D.; Zuo, J.; Cui, T. Electromagnetic Transient Model and Parameters Identification of PMSG-Based Wind Farm. In Proceedings of the 2019 IEEE 3rd Conference on Energy Internet and Energy System Integration (EI2), Changsha, China, 8–10 November 2019; pp. 72–77. [Google Scholar]
- Liu, H.; Chen, Z. Aggregated Modelling for Wind Farms for Power System Transient Stability Studies. In Proceedings of the 2012 Asia-Pacific Power and Energy Engineering Conference, Shanghai, China, 27–29 March 2012; pp. 1–6. [Google Scholar]
- Liu, Z.; Wang, L.; Li, N.; Song, J. Performance analysis and model comparison of PMSG for power system transient stability studies. In Proceedings of the 2016 IEEE International Conference on Power and Renewable Energy (ICPRE), Shanghai, China, 21–23 October 2016; pp. 294–300. [Google Scholar]
- Alepuz, S.; Calle, A.; Busquets, M.S.; Kouro, S.; Wu, B. Use of stored energy in PMSG rotor inertia for low-voltage ride-through in back-to-back NPC converter-based wind power systems. IEEE Tran. Ind. Electron. 2013, 60, 1788–1796. [Google Scholar] [CrossRef]
- Conroy, J.; Watson, R. Aggregate modelling of wind farms containing full-converter wind turbine generators with permanent magnet synchronous machines: Transient stability studies. IET Renew. Power Gener. 2009, 3, 39–52. [Google Scholar] [CrossRef]
- Ellis, A.; Kazachkov, Y.; Muljadi, E.; Pourbeik, P.; Sanchez-Gasca, J.J. Description and technical specifications for generic WTG models—A status report. In Proceedings of the 2011 IEEE/PES Power Systems Conference and Exposition, Phoenix, AZ, USA, 20–23 March 2011; pp. 1–8. [Google Scholar]
- Ju, K.; Wu, F.; Shi, L.; Huang, H.; Hua, W.; He, W.; Hua, G. Simplified modeling of Directly Driven Wind Turbine with Permanent Magnet Synchronous Generator based on PSASP/UD. In Proceedings of the 2019 IEEE Innovative Smart Grid Technologies-Asia (ISGT Asia), Chengdu, China, 21–24 May 2019; pp. 1254–1259. [Google Scholar]
- Chen, W.; Feng, B.; Tan, Z.; Wu, N.; Song, F. Intelligent fault diagnosis framework of microgrid based on cloud–edge integration. Energy Rep. 2022, 8, 131–139. [Google Scholar] [CrossRef]
- Xu, L.; Wang, G.; Fu, L.; Wu, Y.; Shi, Q. General average model of D-PMSG and its application with virtual inertia control. In Proceedings of the 2015 IEEE International Conference on Mechatronics and Automation (ICMA), Beijing, China, 2–5 August 2015; pp. 802–807. [Google Scholar]
- Vidyanandan, K.V.; Senroy, N. Primary frequency regulation by deloaded wind turbines using variable droop. IEEE Trans. Power Syst. 2013, 28, 837–846. [Google Scholar] [CrossRef]
- Kang, L.; Shi, L.; Ni, Y.; Yao, L.; Masoud, B. Small signal stability analysis with penetration of grid-connected wind farm of PMSG type. In Proceedings of the 2011 International Conference on Advanced Power System Automation and Protection, Beijing, China, 16–20 October 2011; pp. 147–151. [Google Scholar]
- Ding, N.; Lu, Z.; Qiao, Y.; Min, Y. Simplified equivalent models of large-scale wind power and their application on small-signal stability. J. Mod. Power Syst. Cle. 2013, 1, 58–64. [Google Scholar] [CrossRef] [Green Version]
- Luo, J.; Shi, L.; Ni, Y. A Solution of Optimal Power Flow Incorporating Wind Generation and Power Grid Uncertainties. IEEE Access 2018, 6, 19681–19690. [Google Scholar] [CrossRef]
- Chen, J.J.; Wu, Q.H. Probability interval optimization for optimal power flow considering wind power integrated. In Proceedings of the 2016 International Conference on Probabilistic Methods Applied to Power Systems (PMAPS), Beijing, China, 16–20 October 2016; pp. 1–5. [Google Scholar]
- Wang, R.; Xie, Y.; Zhang, H.; Li, C.; Li, W.; Terzija, V. Dynamic power flow algorithm considering frequency regulation of wind power generators. IET Renew. Power Gen. 2017, 11, 1218–1225. [Google Scholar] [CrossRef]
- Chen, J.; Liu, M.; Donnell, T.O.; Milano, F. Modeling of Smart Transformers for Power System Transient Stability Analysis. IEEE J. Emerg. Sel. Top. Power Electron. 2022, 10, 3759–3770. [Google Scholar] [CrossRef]
- Carne, G.D.; Langwasser, M.; Ndreko, M.; Bachmann, R.; Doncker, R.W.D.; Dimitrovski, R.; Mortimer, B.J.; Neufeld, A.; Rojas, F.; Liserre, M. Which deepness class is suited for modeling power electronics?: A guide for choosing the right model for grid-integration studies. IEEE Ind. Electron. Mag. 2019, 13, 41–55. [Google Scholar] [CrossRef]
- Bunjongjit, K.; Kumsuwan, Y. Performance enhancement of PMSG systems with control of generator-side converter using d-axis stator current controller. In Proceedings of the 2013 10th International Conference on Electrical Engineering/Electronics, Computer, Telecommunications and Information Technology, Krabi, Thailand, 15–17 May 2013; pp. 1–5. [Google Scholar]
- Milano, F. A python-based software tool for power system analysis. In Proceedings of the 2013 IEEE Power & Energy Society General Meeting, Vancouver, BC, Canada, 21–25 July 2013. [Google Scholar]
- Wang, R.; Li, W.; Bagen, B. Development of Wind Speed Forecasting Model Based on the Weibull Probability Distribution. In Proceedings of the 2011 International Conference on Computer Distributed Control and Intelligent Environmental Monitoring, Changsha, China, 19–20 February 2011; pp. 2062–2065. [Google Scholar]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| 1 MW | |
| 1 kV | |
| 38 m | |
| 10 m/s | |
| 1.225 kg/m3 | |
| 0.5 s | |
| 48 | |
| 1.885 pu | |
| 3.5 × 10−3 pu/5.44 × 10−2 pu | |
| 9.07 × 10−3 pu/5.77 × 10−5 pu/9.07 × 10−2 pu | |
| 1.04 × 10−4 pu | |
| 1.5 pu | |
| 0.69 pu | |
| 3.1416/0.5236/0 |
| D-PMSG Stage | Full Model | 10 ms Model | 100 ms Model |
|---|---|---|---|
| Mechanical model | (1–8) | (1–5) (29–30) | (1–5) (29–30) |
| FPC model | (9–12) | (11) (31–32) | (31–33) |
| Control system model | (13–26) | (13–21) (23–25) | (13–21) (24–25) (34) |
| Time step | 0.1 ms | 1 ms | 10 ms |
| Parameter | Value |
|---|---|
| 1 MW | |
| 1 kV | |
| 38 m | |
| 9.145 m/s | |
| 1.225 kg/m3 | |
| 5.5 s | |
| 48 | |
| 1.885 pu | |
| 6 × 10−3 pu/9.43 × 10−2 pu | |
| 3.14 × 10−2 pu/9.99 × 10−5 pu/3.14 × 10−2 pu | |
| 1.04 × 10−4 pu | |
| 1.5 pu | |
| 0.69 pu | |
| 0.833/133.3/0 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ge, C.; Liu, M.; Chen, J. Modeling of Direct-Drive Permanent Magnet Synchronous Wind Power Generation System Considering the Power System Analysis in Multi-Timescales. Energies 2022, 15, 7471. https://doi.org/10.3390/en15207471
Ge C, Liu M, Chen J. Modeling of Direct-Drive Permanent Magnet Synchronous Wind Power Generation System Considering the Power System Analysis in Multi-Timescales. Energies. 2022; 15(20):7471. https://doi.org/10.3390/en15207471
Chicago/Turabian StyleGe, Chenchen, Muyang Liu, and Junru Chen. 2022. "Modeling of Direct-Drive Permanent Magnet Synchronous Wind Power Generation System Considering the Power System Analysis in Multi-Timescales" Energies 15, no. 20: 7471. https://doi.org/10.3390/en15207471