1. Introduction
Modern large power systems normally comprise multiple interconnected control areas that are based on diverse energy resources. It is extensively reported that any mismatch between the generated power and customer demand results in a deviation in the frequency and tie-line power interchange [
1,
2,
3,
4]. This deviation in some cases may lead to system performance degradation and even cause the power systems to collapse [
5]. Load Frequency Control (LFC) is introduced in power systems as a key service that plays its role in maintaining the frequency and tie-line power within scheduled limits in normal conditions as well as in the event of any sudden disturbance. This results in the improvement of the stability of the power systems, forming a successful operation [
6,
7].
In classical LFC applications, the Proportional Integral (PI) and Proportional Integral Derivative (PID) controllers are commonly utilised. The classical PID with a filtered derivative mode optimized by an improved version of the Jaya algorithm, called the Self-Adaptive Multi-Population Elitist (SAMPE) Jaya optimizer, is proposed for the LFC in a two-area interconnected power system [
8]. A novel Predictive Functional Modified PID (PFMPID), tuned by the Grasshopper Optimization Algorithm (GOA), is suggested to solve the LFC problem in a three-area power system under a restructured environment and including various generation units. Simulation results demonstrated that the proposed PFMPID outperformed the classical PID [
9]. A cascade of PI and PD with a filtered derivative action (PI − PDn) tuned by an Enhanced Coyote Optimization Algorithm (ECOA), equipped in a dual-area power system that consists of a photovoltaic (PV) unit to overcome the problem of frequency and tie-line power deviation, is studied in [
10]. The proposed PI − PDn has shown a great superiority over the other investigated controllers. However, due to the escalating complexities with high nonlinearities in current power systems, investigations into the possibility of applying other control techniques are necessitated [
11]. Accordingly, several studies have proposed many strategies based on different control theories to address the challenges of the LFC in power systems. For example, Model Predictive Control (MPC) is employed for the LFC in a two-area power system that comprises a photovoltaic generation unit [
12]. Sliding Mode Control (SMC) is used for the LFC in a simplified Great Britain (GB) power system [
13]. In [
14], a novel adaptive sliding mode control method is proposed for the LFC in a three-equal-area interconnected power system with non-reheat turbines; this design demonstrated a better performance in comparison with the classical adaptive sliding mode control scheme. A discrete LFC method has been suggested for power systems with a high penetration of wind power, based on a sampled-data control; this technique has been examined in a single-area power system, a dual-area interconnected power system, and a three-area restricted power system [
15]. A Linear Matrix Inequality (LMI)-based LFC with a communication delay in a two-area electrical system is investigated in [
16].
control is used in an isolated, distributed generation system for load frequency control [
17]. Moreover, due to its merits, Fuzzy Logic Control (FLC) has recently been widely addressed as a potential solution for LFC based on different structures. It is revealed that FLC can successfully handle the problem of load frequency control. However, there was no identified rule to be utilised in order to find the fuzzy parameters, i.e., the scaling factors of the inputs and outputs as well as the membership functions and the rule base [
7]. Therefore, soft computing methods have emerged to deal with this issue. In [
18], a fuzzy hierarchal scheme, tuned by Particle Swarm Optimization (PSO), is proposed for the LFC in the Great Britain (GB) power system. Differential Evolution (DE) was employed to optimize the parameters of a fuzzy PID with a derivative filter for the LFC in a multi-sourced, deregulated power system [
19]. An optimized fuzzy self-tuning PID controller is proposed for the LFC in two- and three-area interconnected power systems [
20]. To ameliorate the proposed controller, a Tribe-DE optimization algorithm was utilized to find the optimum values of the scaling factor and the membership function parameters of the fuzzy PID controllers. The fuzzy PID tuned by Teaching Learning Based Optimization (TLBO) for a dual-area power system is studied in [
21]. A novel hybrid DE and Pattern Search (PS) has been used to tune the scaling factor gains of fuzzy PI/PID controllers employed for the LFC in a two-area power system [
22]. The most recent controllers, based on the different strategies employed for LFCs in power systems, are concluded in [
23].
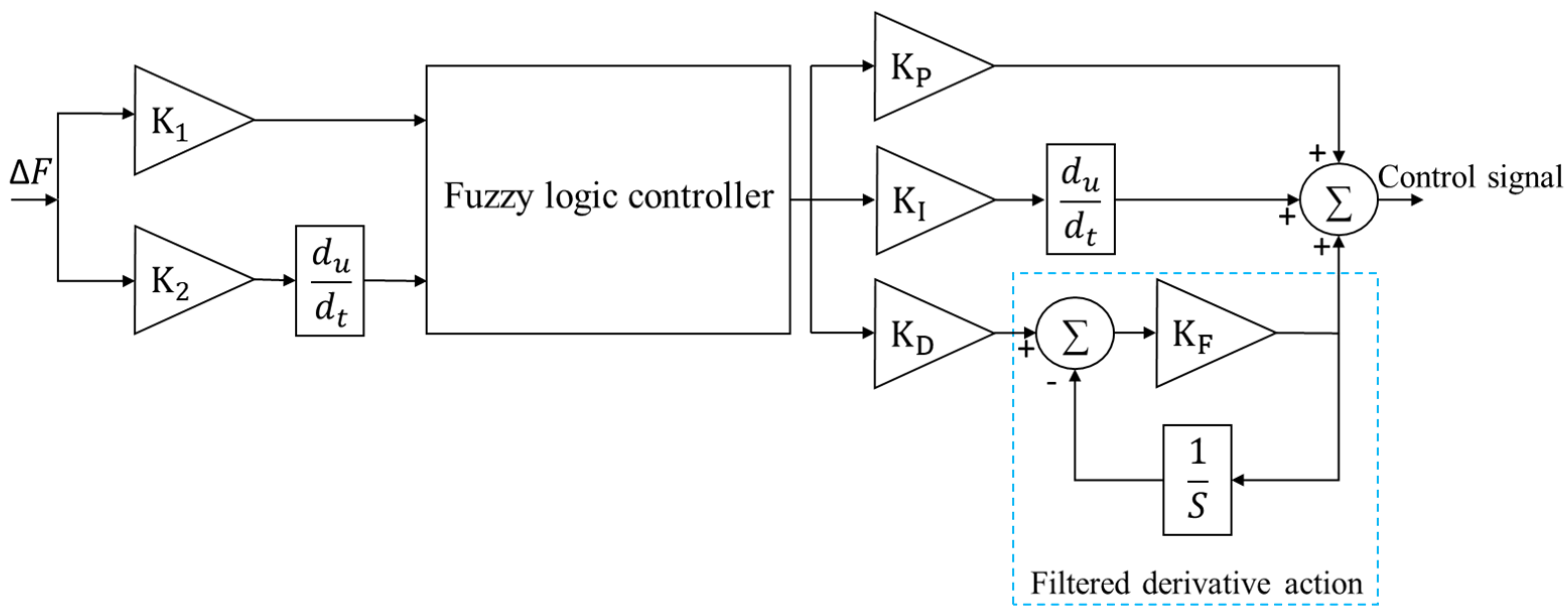
In view of the above, this work proposes a design of a Fuzzy PID with a derivative filter action (Fuzzy PIDF) employed for the LFC in an unequal two-area interconnected thermal power system. Moreover, as the classical methods, including hit and trail, used to determine the optimum values of the scaling factor gains of fuzzy PIDF are time-consuming and may not provide desirable solutions, the parameters of the proposed controller are optimized by an algorithm called the Bees Algorithm (BA), which has demonstrated a successful implementation in diverse optimization problems [
24,
25,
26,
27]. TLBO and PSO are also used in this work for the same purpose. The aim of the work presented in this paper can be summarized as follows: (i) to propose a Fuzzy PIDF optimized by the BA and other two algorithms for load frequency control of a two-area power system and to investigate its dynamic performance; (ii) to assess the supremacy of the proposed technique by comparing the results with those of previously published works based on TLBO tuned Fuzzy PID [
21] and Lozi map-based Chaotic Optimization Algorithm (LCOA) tuned PID [
28]; and (iii) to investigate the robustness of the Fuzzy PIDF against a wide variation range in the parametric uncertainties of the investigated system.
Furthermore, from the comprehensive literature review, it is concluded that the proposed techniques based on different theories may provide the desired performance to overcome the problem of frequency deviation. However, the above-mentioned studies have not considered the reliability aspects in the design of the proposed schemes. This research gap has motivated the authors to suggest fuzzy control configurations for the LFC in power systems that offer different levels of reliability. Therefore, this study is then extended to propose three different fuzzy control structures, namely the Fuzzy Cascade PI − PD, the Fuzzy PI + PD, and the Fuzzy PI plus the Fuzzy PD. An extensive assessment of the robustness of these structures towards the parametric uncertainties of the testbed system, considering thirteen cases, is conducted.
The rest of this study is structured as follows.
Section 2 introduces the testbed dual-area interconnected power system.
Section 3 details the proposed Fuzzy PID with a filtered derivative action and the employed objective function.
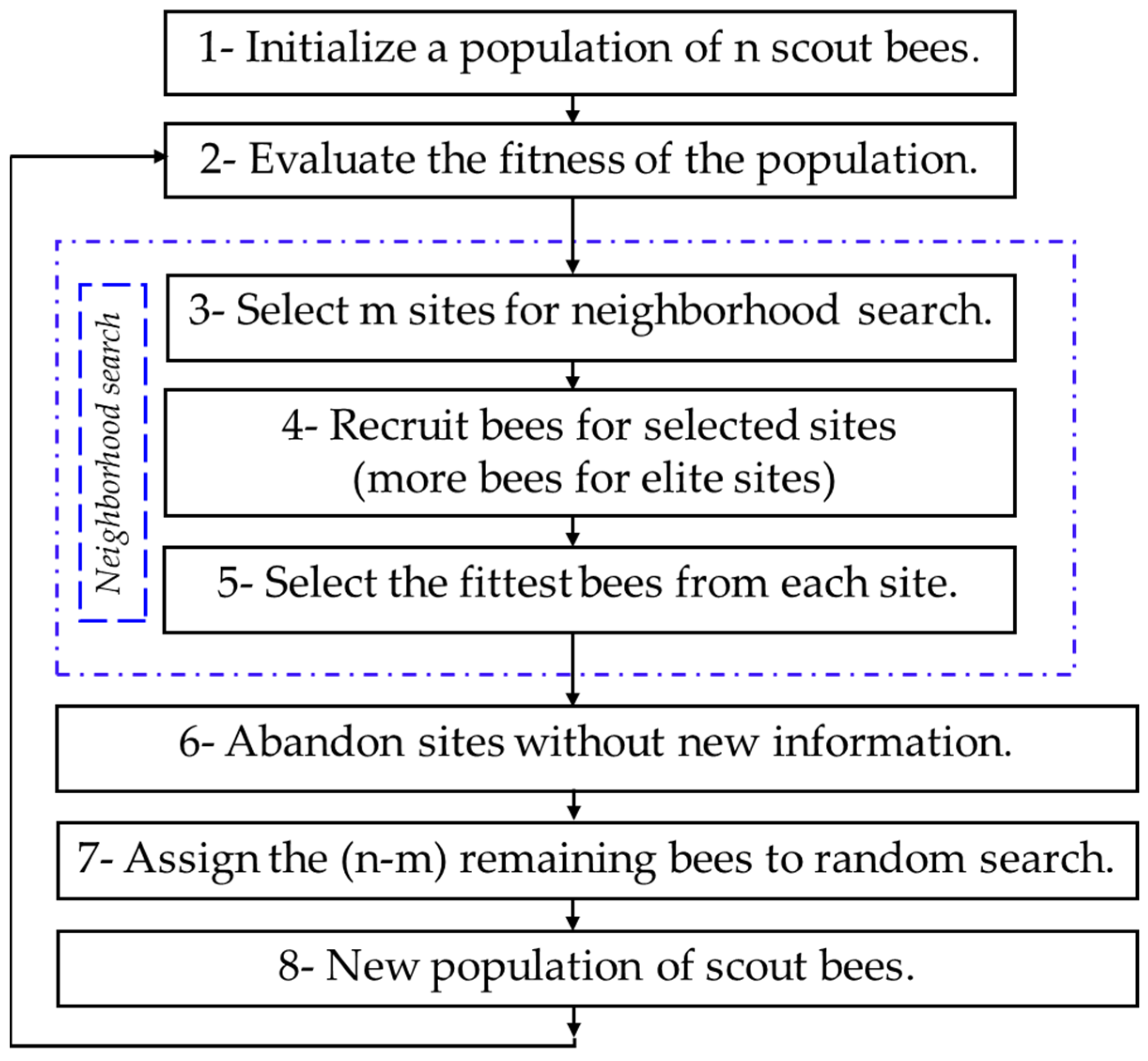
Section 4 gives a concise introduction about the suggested optimization technique—the Bees Algorithm.
Section 5 details the main simulation results based on the proposed Fuzzy PIDF; this section also provides a comparative study between the Fuzzy PIDF tuned by the BA and the same controller tuned by PSO and TLBO, in addition to other previously published works. Then,
Section 6 proposes three novel fuzzy configurations based on the suggested BA, while
Section 7 investigates the robustness analyses of the proposed fuzzy structures towards the parametric uncertainties of the testbed system. Lastly,
Section 8 encapsulates the main outcomes and proposes a clear path for future works based on this research.
5. Results and Discussions
This study was carried out in MATLAB (2019a); the Bees Algorithm (BA), Teaching Learning Based Optimisation (TLBO), and Particle Swarm Optimisation (PSO) codes were programmed in (.m files); the examined dual-area power system was built in the MATLAB Simulink environment. The parameters of the BA and the PSO were set as shown in
Table 3. Where
and
are the acceleration constants,
and
are the inertia weights, CR is the crossover rate, and No. Par is the number of particles. The TLBO has two parameters to be set, namely the population size and the number of iterations, which were set as 50 and 40, respectively.
A Step Load Perturbation (SLP) of 0.2 pu was applied in area one to study the dynamic performance of the system with the proposed Fuzzy PIDF. The optimum values of the Fuzzy PIDF parameters obtained by the BA, TLBO, and PSO are given in
Table 4. The scaling factors of the proposed Fuzzy controller design were chosen in the limits of [0,1,2], and the filter coefficient
was constrained in the range from 0 to 100.
Moreover, as is above mentioned, the results obtained from the proposed fuzzy structure are compared with those of the previously published studies for the same system investigated in [
21] and [
28]. The optimum gains of the PID tuned by the LCOA proposed in [
28] and the TLBO optimized Fuzzy PID studied in [
21] are given in
Table 5.
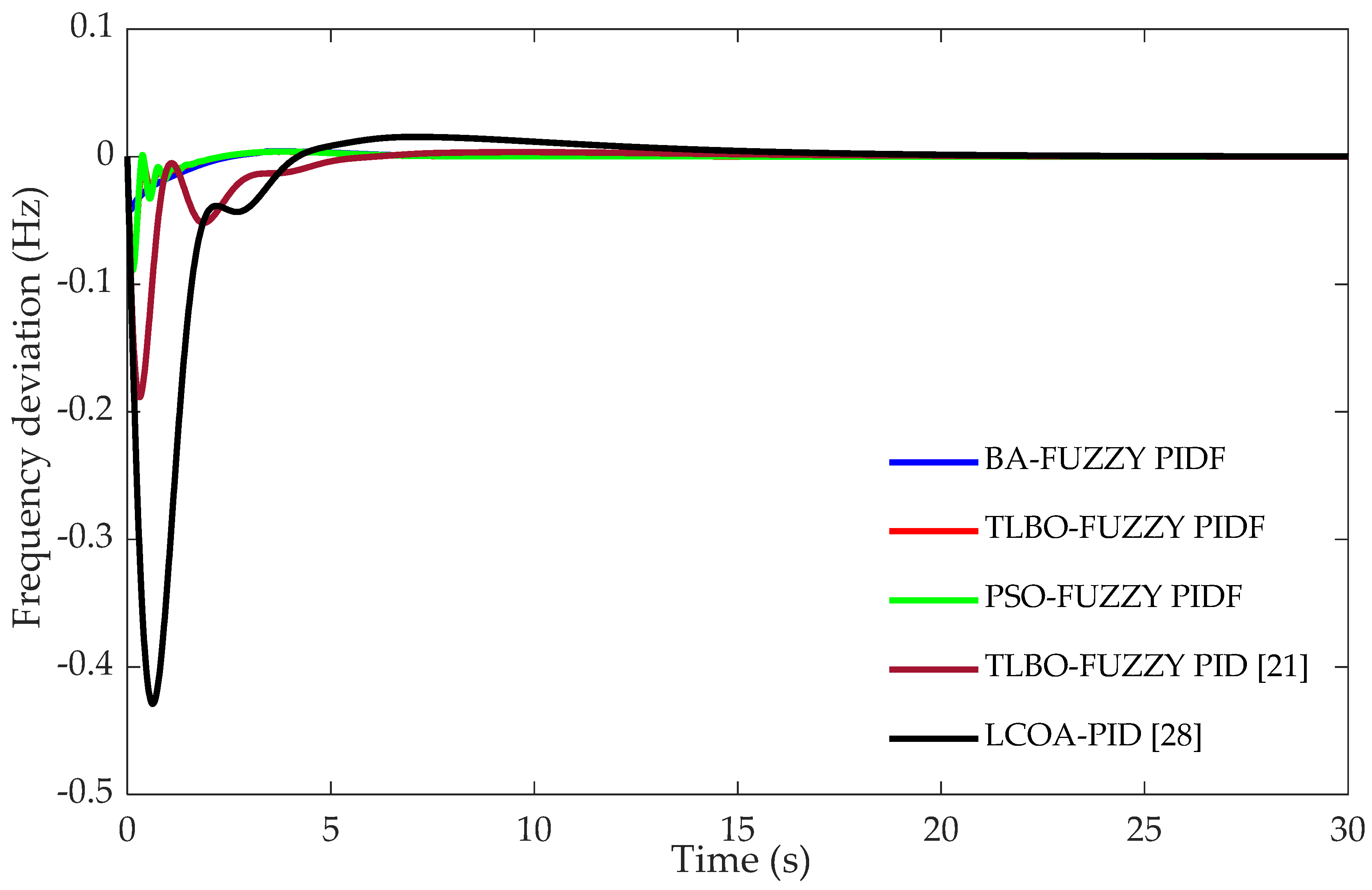
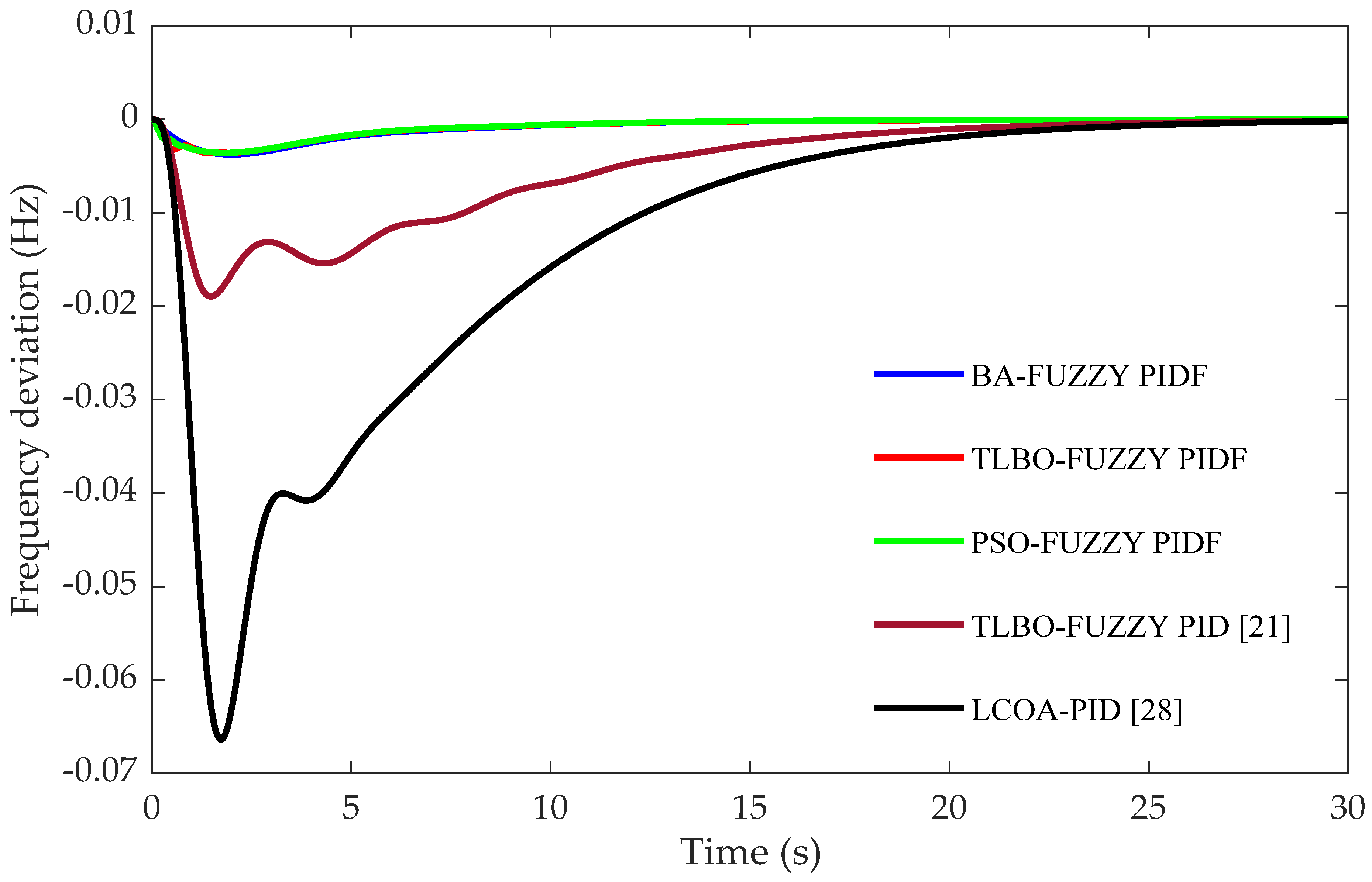
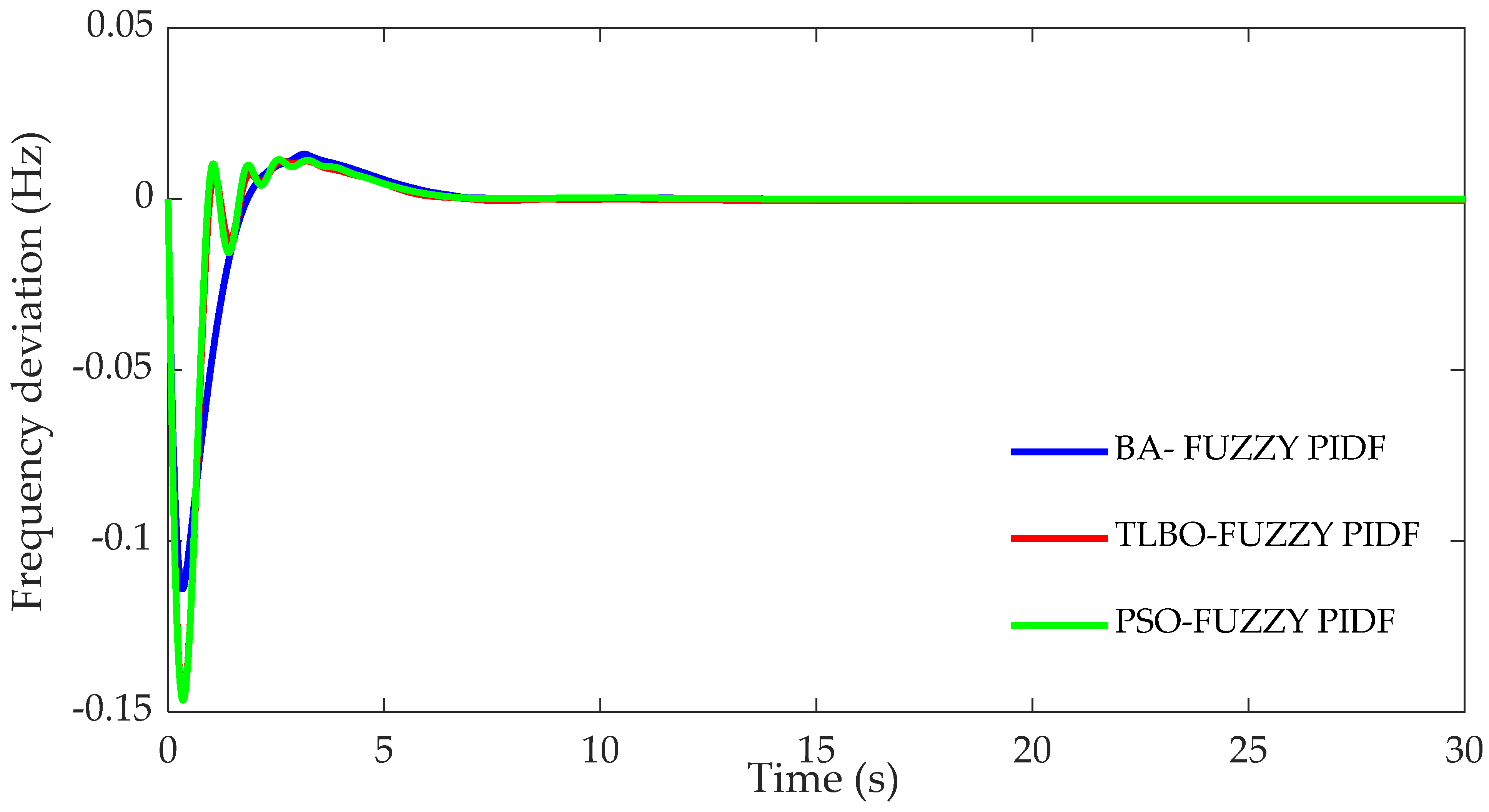
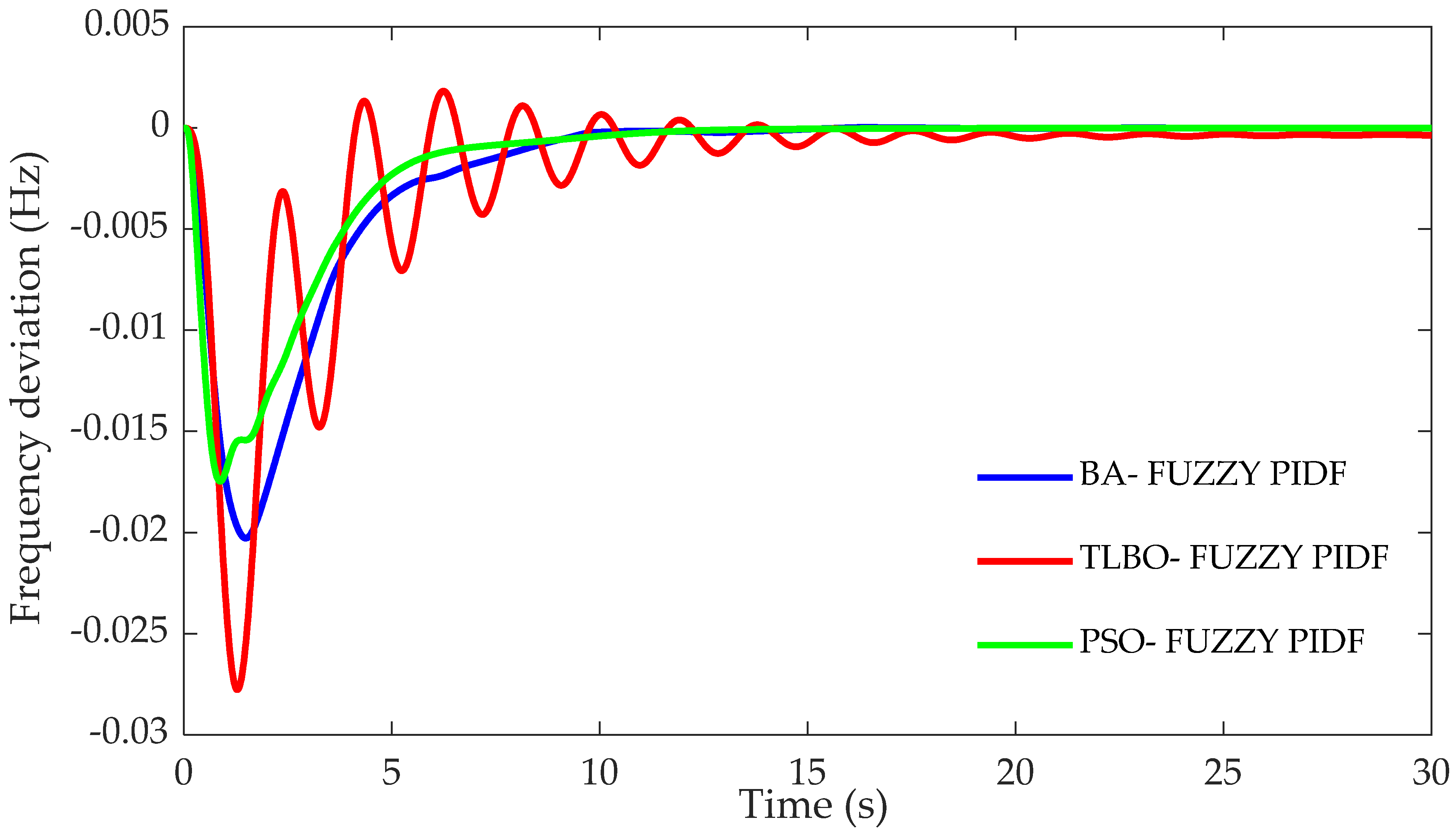
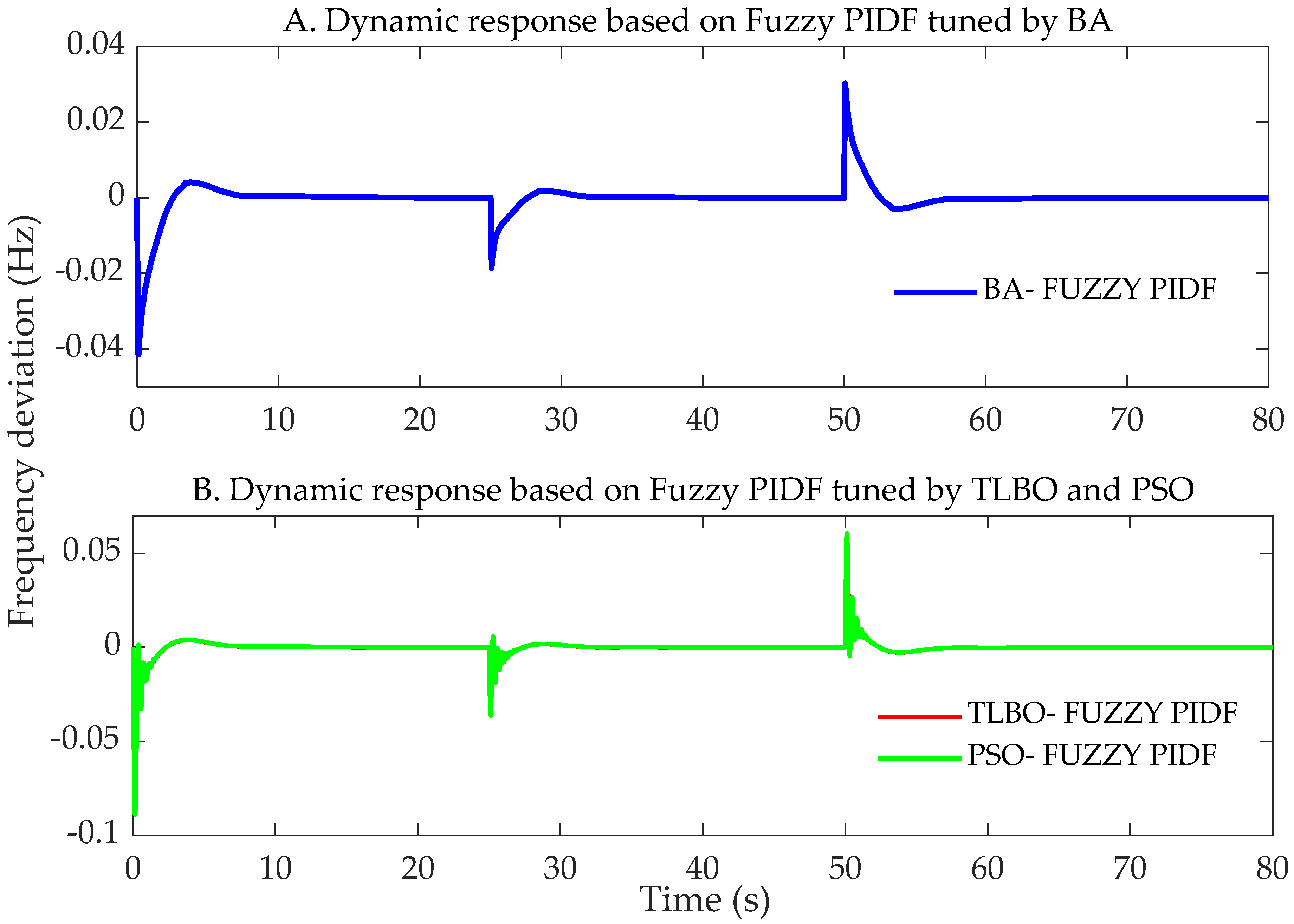
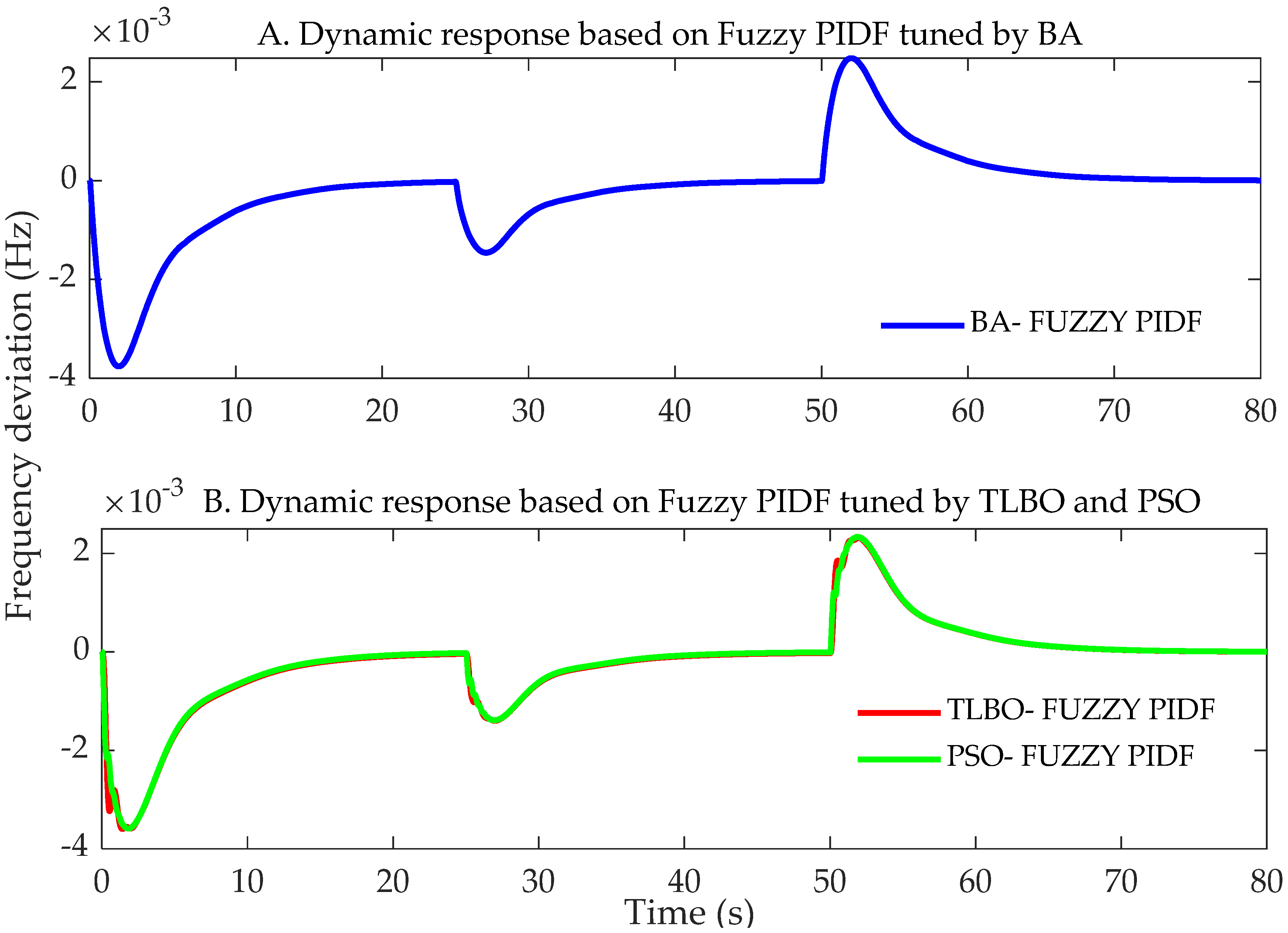
The frequency deviation in both areas,
and
, following the implementation of 0.2 pu disturbance in area one, is shown in
Figure 5 and
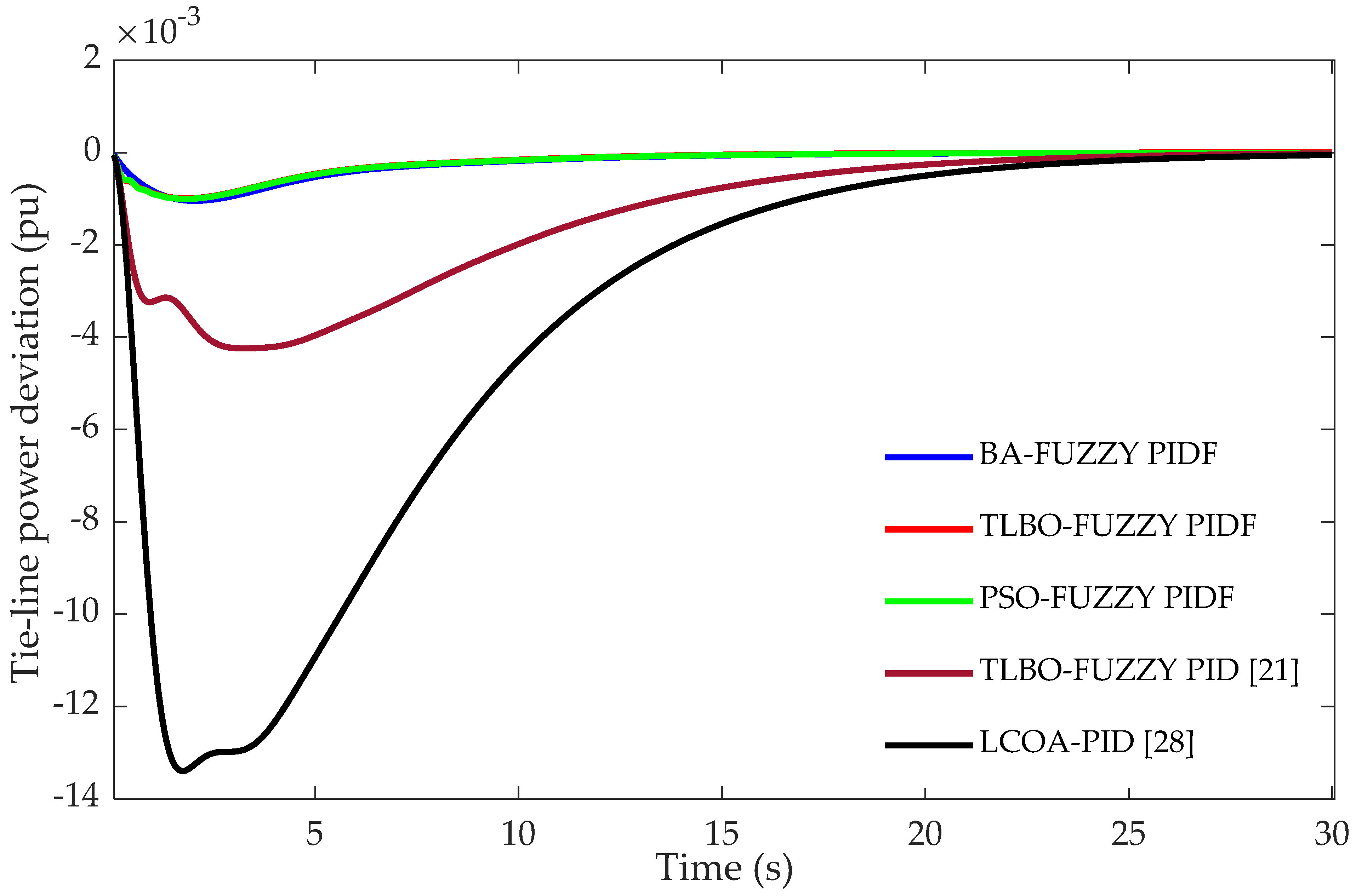
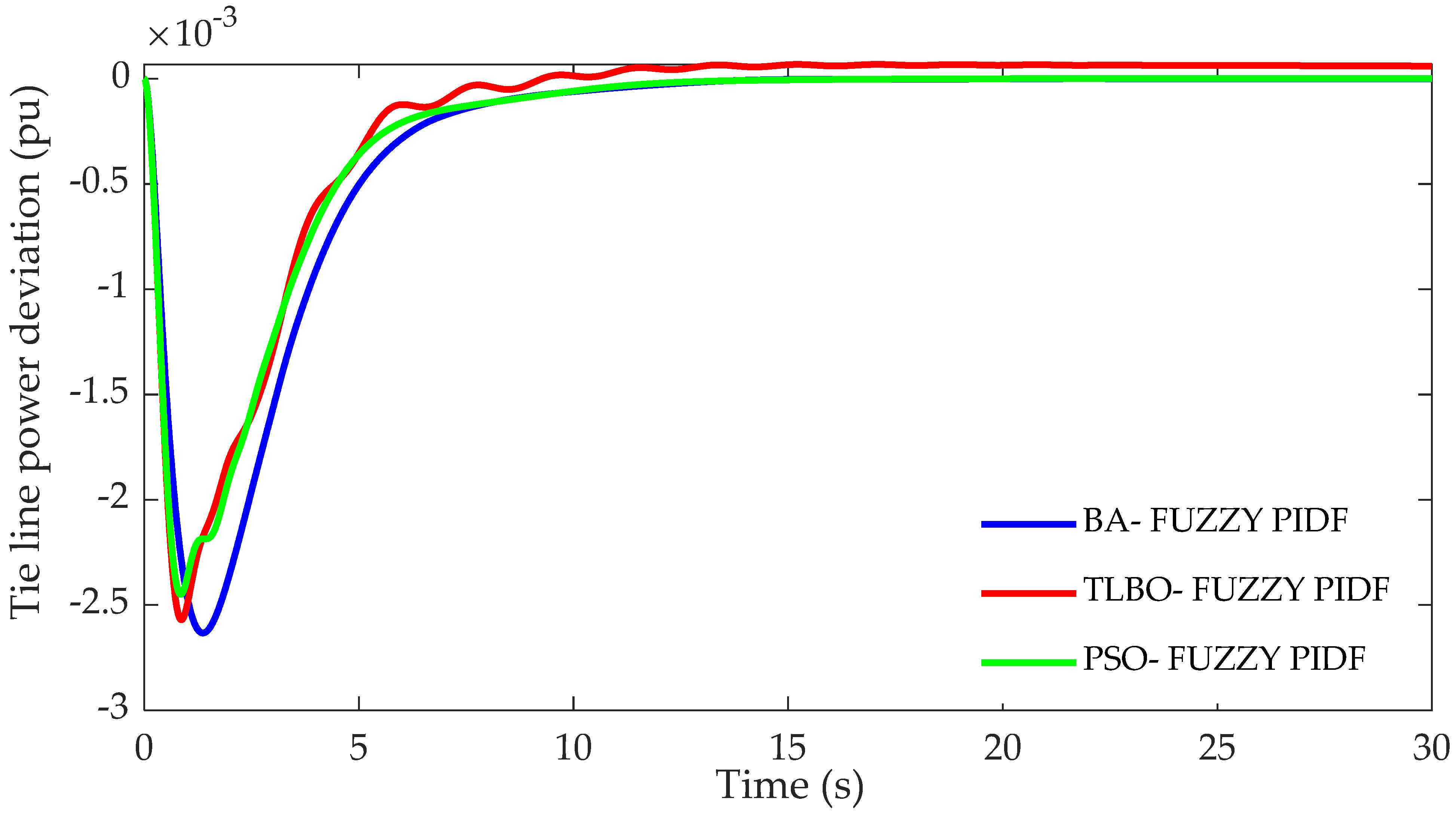
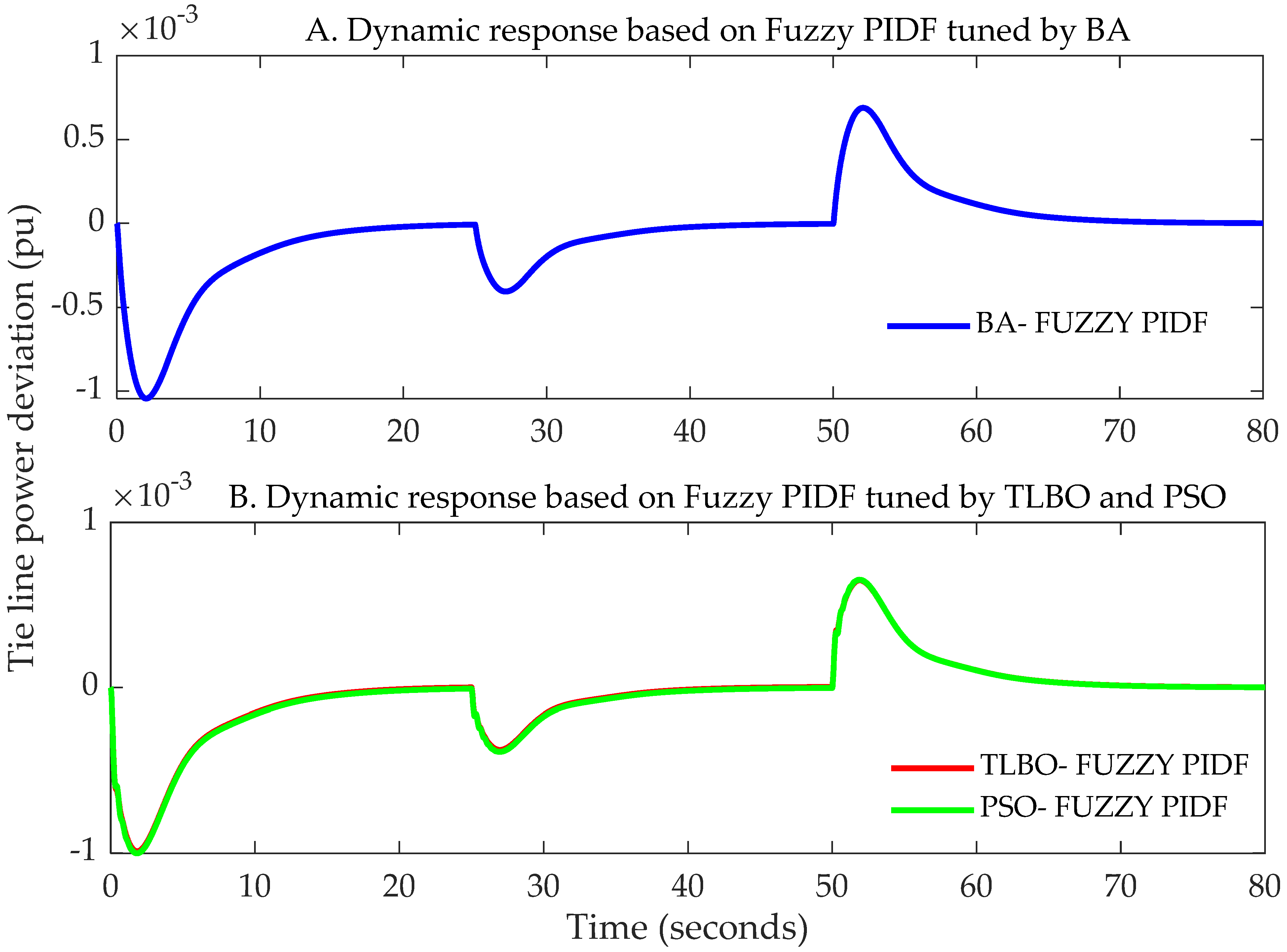
Figure 6, respectively. The tie-line power deviation is given in
Figure 7.
Figure 5,
Figure 6 and
Figure 7 summarize the main outcomes of the proposed Fuzzy PIDF, where it is obviously remarked that this controller offered the best response among the investigated methods. Furthermore, despite the clear similarity in the dynamic response obtained by the proposed fuzzy structure tuned by BA, TLBO, and PSO, it is observed that the BA optimized the proposed fuzzy controller and provided the best result in terms of the drop in the frequency represented by the peak undershoot occurring in area one after the 0.2 pu disturbance enforcement. However, the Fuzzy PIDF tuned by the TLBO and PSO offered the best drop in frequency in area two. The dynamic performance of the system based on the Fuzzy PIDF tuned by the suggested algorithms, the Fuzzy PID optimized by TLBO, and the PID controller tuned by LCOA, represented by undershoot, peak overshoot, and settling time in
,
, and
, is illustrated in
Table 6; the value of the objective function based on each technique is also given.
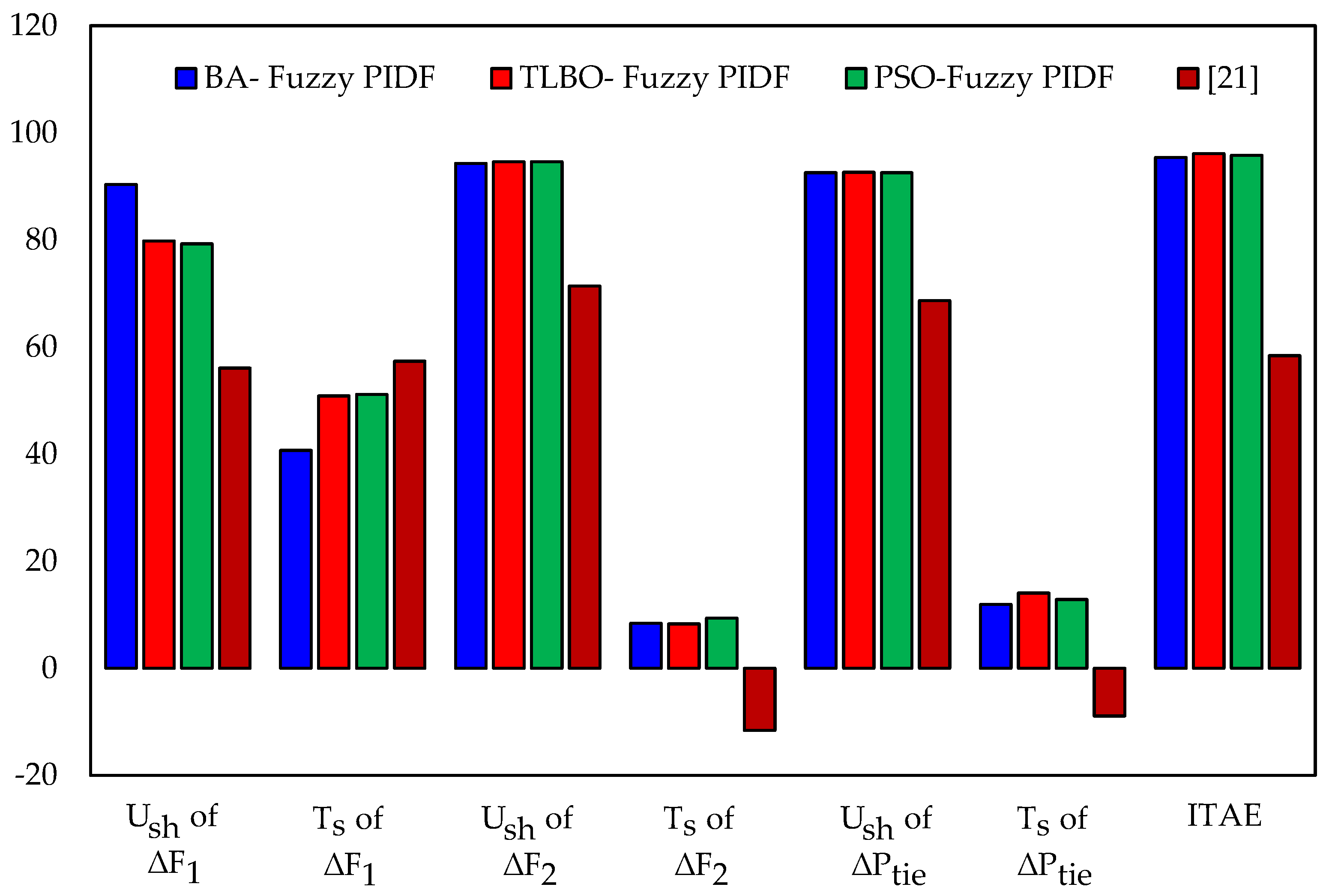
Table 6 gives further verification of the superiority of the suggested controller over those presented in previous studies. The percentage of improvement in the undershoot (
), settling time (
), and the ITAE for the Fuzzy configuration optimized by different algorithms and the Fuzzy PID proposed in [
21], in comparison with the LCOA-based PID controller [
28], is shown in
Figure 8 (this figure is obtained by analyzing the characteristics provided in
Table 6). From
Figure 8, it is noted that with the proposed Fuzzy PIDF controller optimized by the suggested algorithms, the overall performance of the system has witnessed a remarkable improvement.
In order to examine the robustness of the Fuzzy PIDF towards the parametric uncertainties of the controlled system, several parameters of the investigated testbed system are simultaneously altered from their nominal values. The parameters Tg, Tt, and H in both areas are varied by +50%, while the parameters B and D are varied by −50%. A step load perturbation of 0.2 pu is suddenly applied (at time
t = 0 s) in area one and the optimal gains of the Fuzzy PIDF obtained in the normal condition are not to be re-tuned to verify the robustness of the proposed controller.
Figure 9,
Figure 10 and
Figure 11 and
Table 7 show the dynamic performance of the two-area power system as it is exposed to a parametric deviation test with the recommended Fuzzy PIDF-based BA, TLBO, and PSO employed for LFC.
The results obtained from the robustness analysis demonstrate that the proposed fuzzy structure equipped in the testbed system for the LFC is robust towards the parametric variation of the controlled plant. It is also noticed that the same controller optimized by the TLBO has shown less robustness as compared with the same controller tuned by the BA and the PSO.
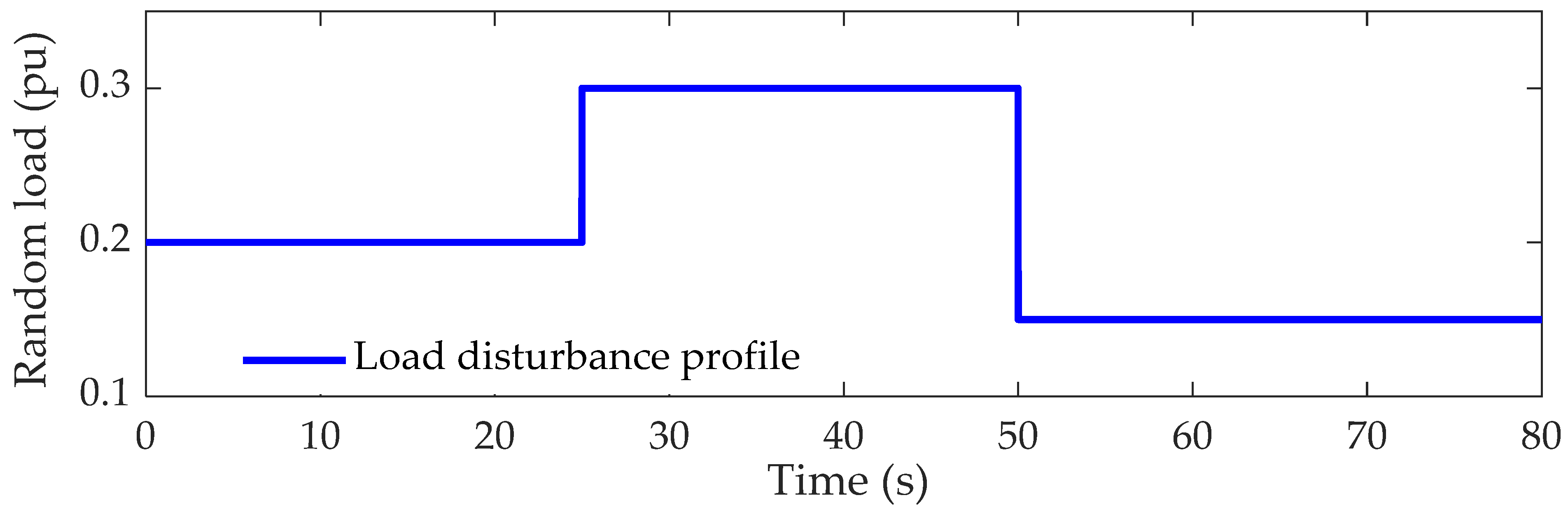
Moreover, for further robustness examination of the proposed fuzzy design at various load perturbations, a random disturbance is applied with a different magnitude in area one, as demonstrated in
Figure 12. The dynamic responses of the testbed system when it is exposed to different load disturbances are shown in
Figure 13,
Figure 14 and
Figure 15.
From
Figure 13,
Figure 14 and
Figure 15, it is noticeable that the optimized fuzzy control structure continued to demonstrate its robustness even with random load disturbance applied in the system. Moreover, it is observed that the Fuzzy PIDF-based BA offers the best response as less peak undershoot and less oscillation are achieved in comparison with the same controller-based PSO and TLBO.
6. Different Configurations of Fuzzy Control Tuned by BA
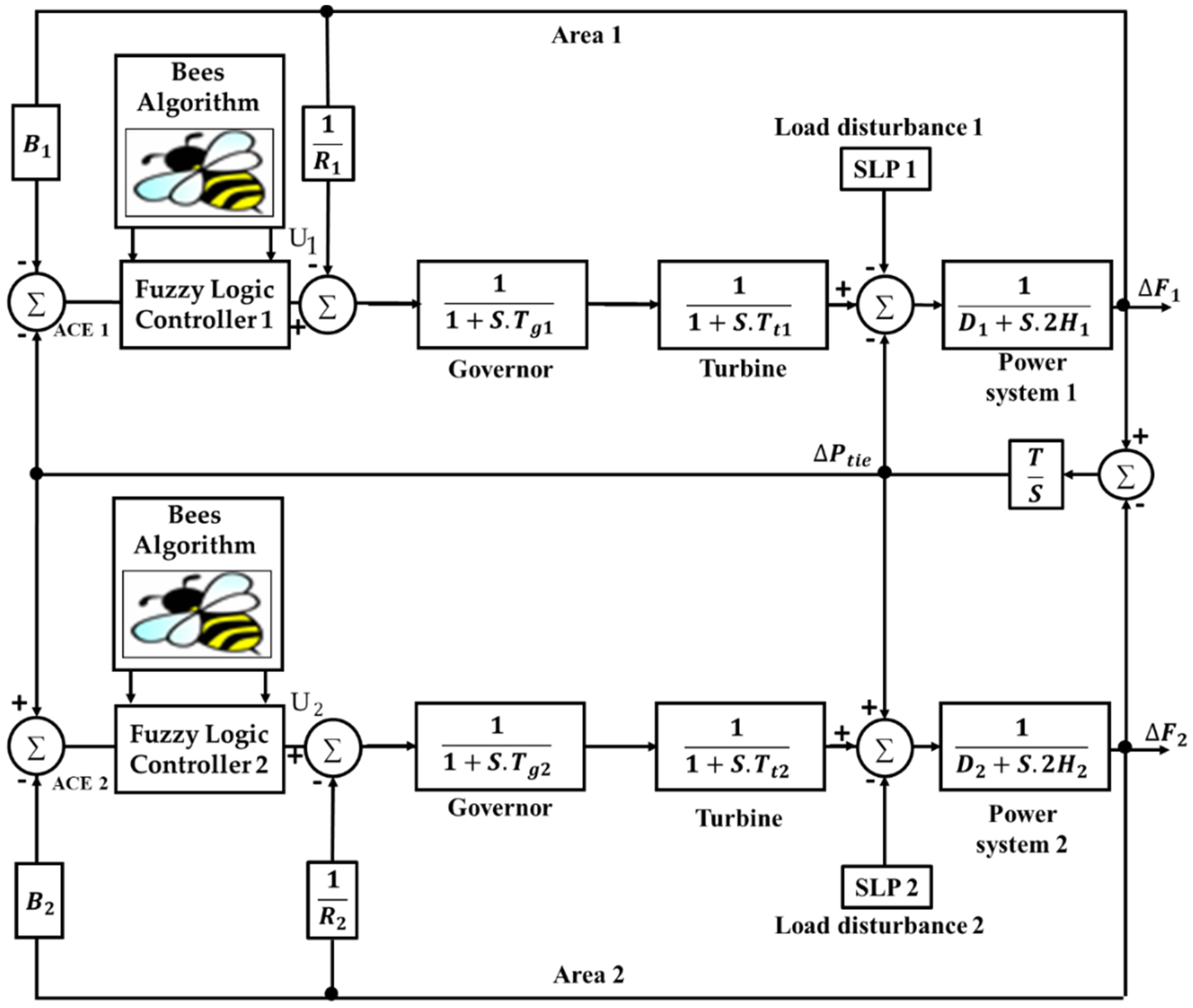
It is revealed that the membership function selection and the setting of the rule base are vital in designing a fuzzy controller. However, it is also a significant matter to investigate the impact of the configuration of the fuzzy controller. This is to explore how different structures of the scaling factor gains influence the performance of the controller. Based on this statement, this study is extended to propose three different structures of fuzzy control employed as LFC system for the two-area power system shown in
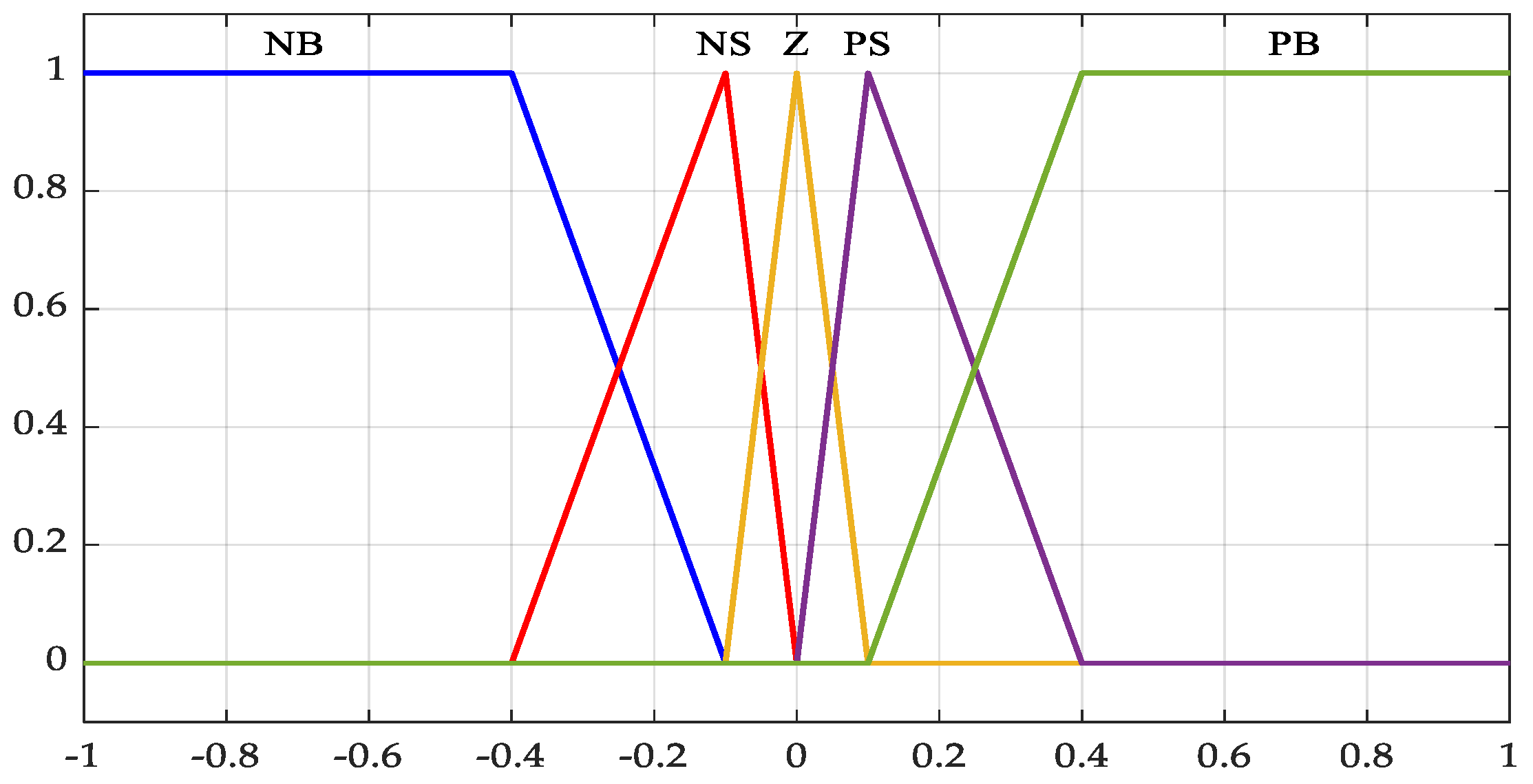
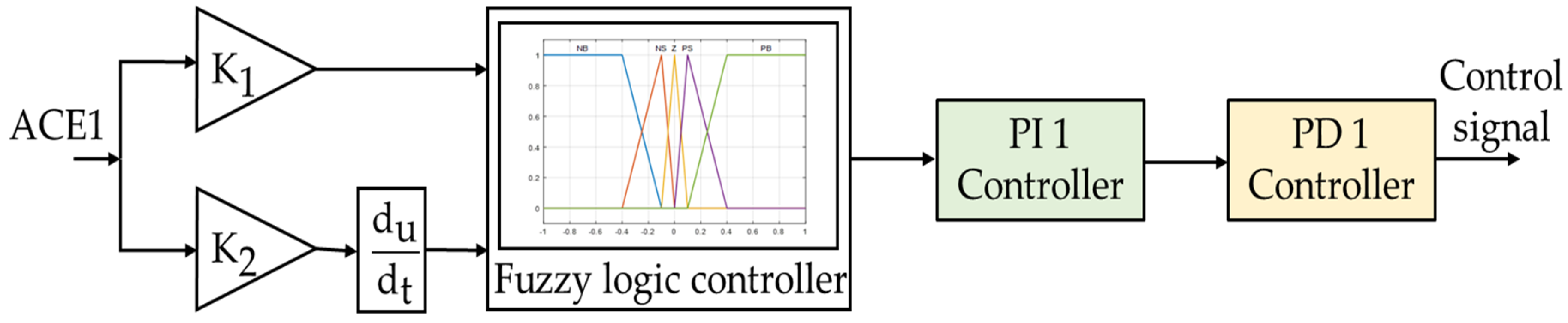
Figure 1. The same membership function used to design the Fuzzy PIDF shown in
Figure 3 is used with the proposed structures. Furthermore, the rule bases required to generate the fuzzy output of the controller are tabulated in
Table 2.
The three novel proposed structures are shown in
Figure 16,
Figure 17 and
Figure 18. Due to the superiority and robustness of the performance of cascading the fraction PI and the fractional PD proposed in [
30,
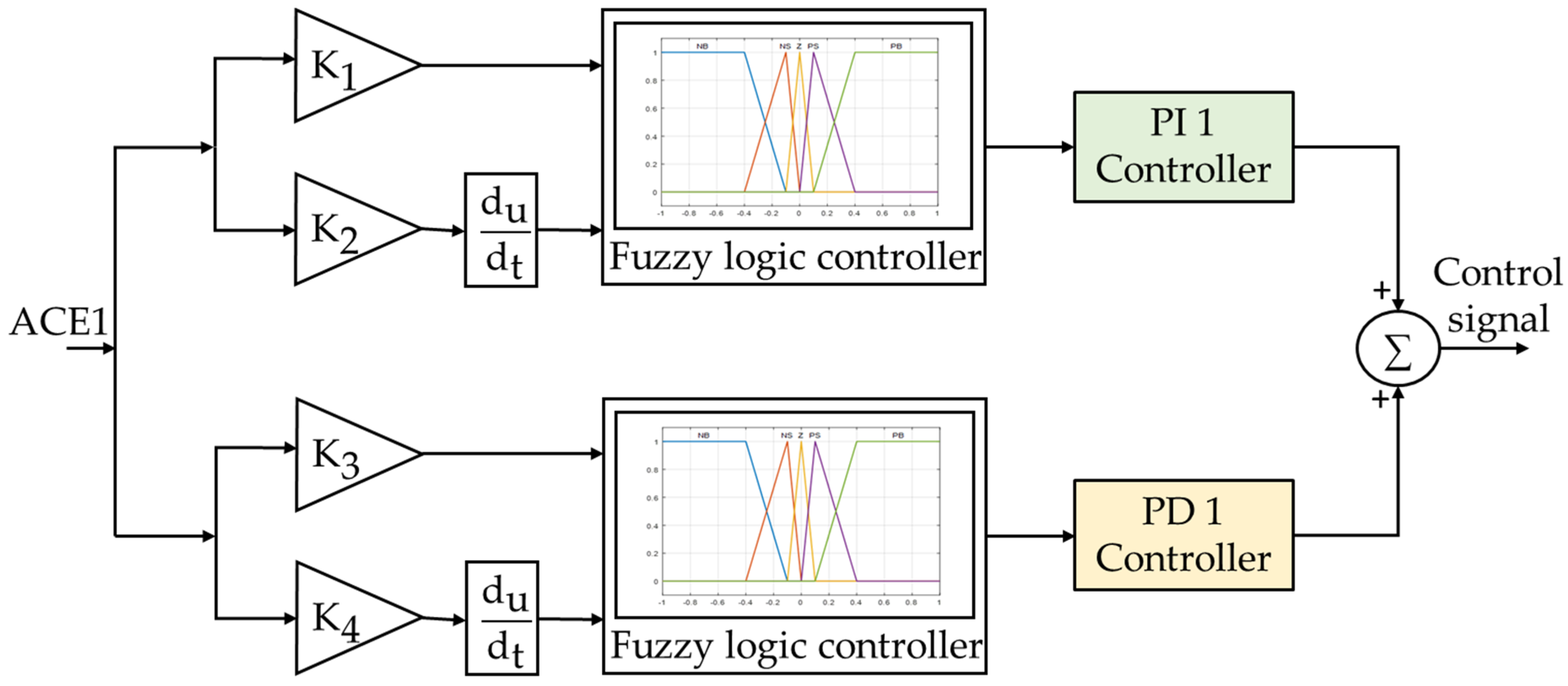
31], it is possible to use this idea of cascading to gain further improvement on the performance of the fuzzy controller by proposing a controller that benefits from the advantages of fuzzy control and the merits of the cascading PI and PD controllers. Accordingly, the configuration illustrated in
Figure 16 is for the proposed Fuzzy Cascade PI − PD (Fuzzy C PI − PD) employed in area one. This controller has six scaling factor gains. Namely,
and
are the input gains of the fuzzy controller,
and
are the PI controller gains, and
and
are for the PD controller gains. The identical Fuzzy C PI − PD controller is employed in area two with the following scaling factor gains:
,
,
,
,
, and
.
Figure 17 demonstrates the structural diagram of the proposed Fuzzy PI plus Fuzzy PD (Fuzzy PI + Fuzzy PD) controller employed in area one for LFC purposes. As is obvious from the figure, two fuzzy controllers are equipped in each area. This hierarchal configuration should enhance the stability of the system and provide better reliability when any failure occurs in any part of this structure; the other part continues to provide its expected control action.
This controller has eight scaling factor gains. Namely, and are the input gains of the Fuzzy PI controller, and are the PI controller gains, and are the input gains of the Fuzzy PD controller, and and are for the PD controller gains. The identical Fuzzy PI + Fuzzy PD is employed in area two with the following parameters: , , , , , , and .
Due to the number of fuzzy rules needed to implement the Fuzzy PI + Fuzzy PD structure in each area [(5 × 5) + (5 × 5) = 50], a longer execution time is required, which may result in slowing down the controller performance; it may be worthwhile to propose another structure that reduces the execution time and guarantees a satisfactory level of reliability. In order to accomplish this, the Fuzzy (PI + PD) shown in
Figure 18 is suggested. This structure has less execution time [5 × 5 = 25] and still offers an acceptable range of reliability. This configuration has six scaling factor gains. Namely,
and
are the input gains of the fuzzy controller,
and
are the PI controller gains, and
and
are for the PD controller gains. A similar Fuzzy C PI − PD controller is employed in area two with the following scaling factor gains:
,
,
,
,
, and
.
In order to achieve the best possible performance of the proposed fuzzy control configurations, the Bees Algorithm (BA) is used to concurrently find the optimal values of the proposed controllers’ gains by minimising the ITAE of the frequency deviation in both areas and the tie-line power fluctuation. The optimum values of the suggested controllers’ gains are illustrated in
Table 8 and
Table 9. The scaling factors of the proposed fuzzy control configurations are chosen in the limits of [0,1,2].
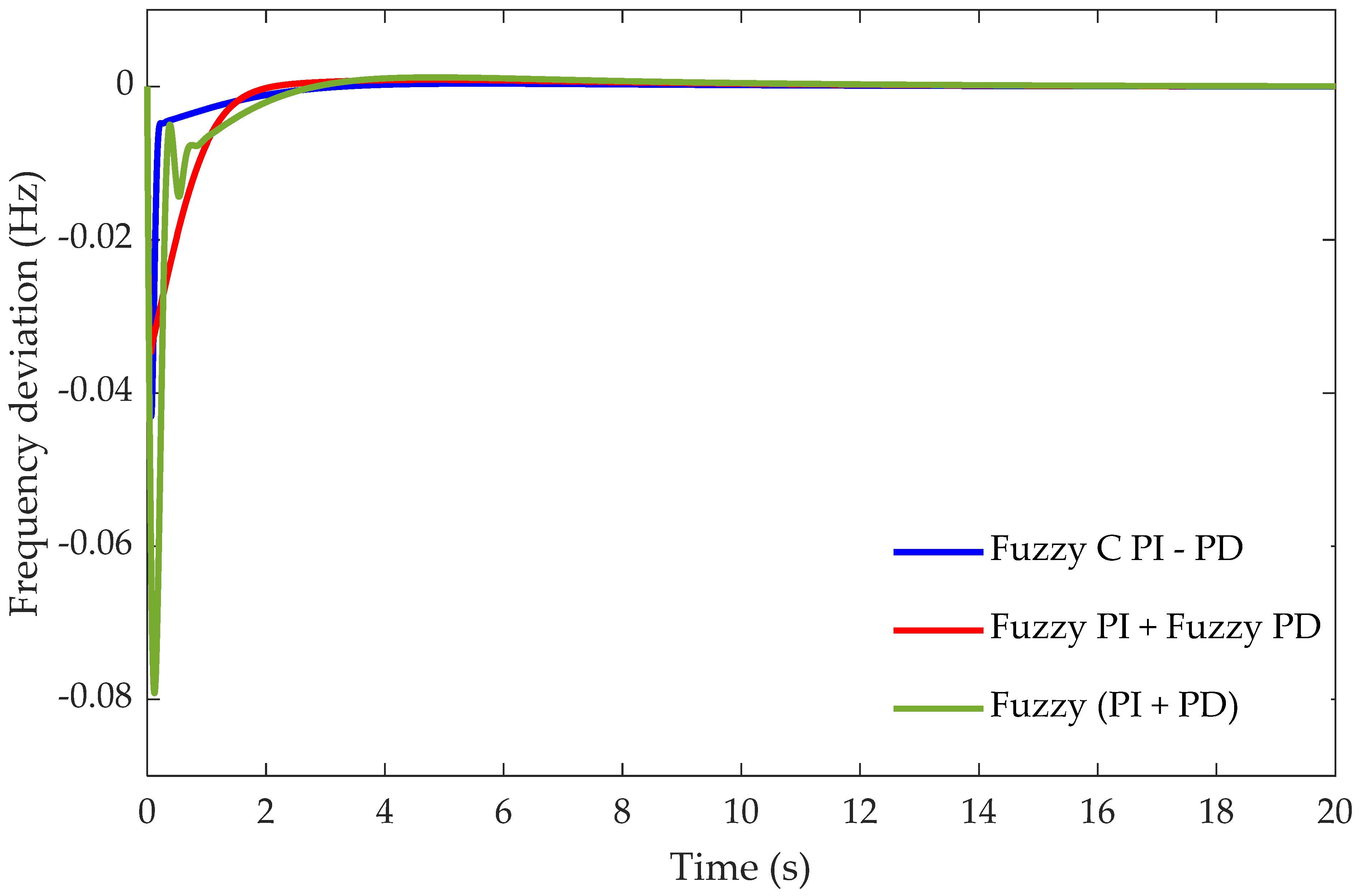
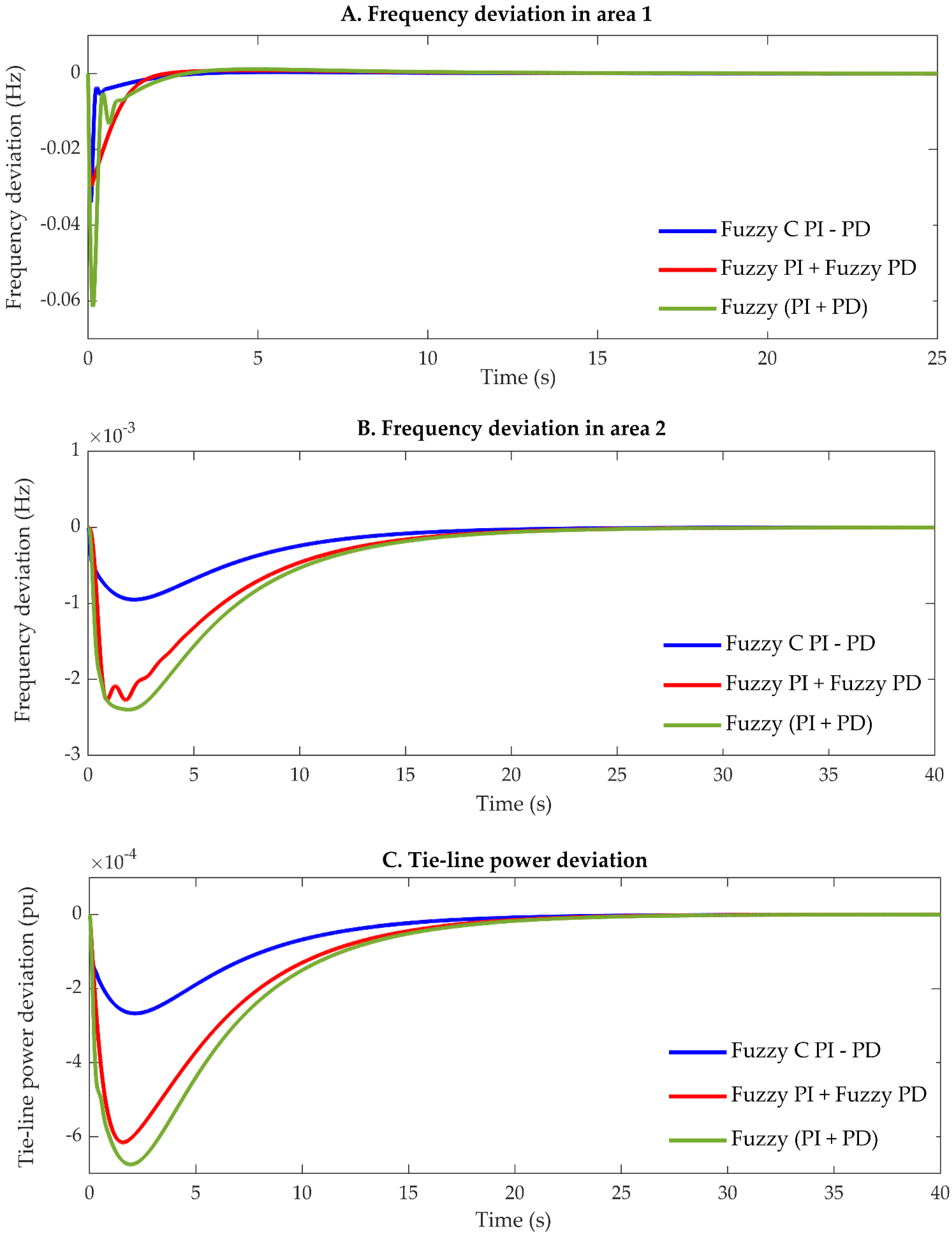
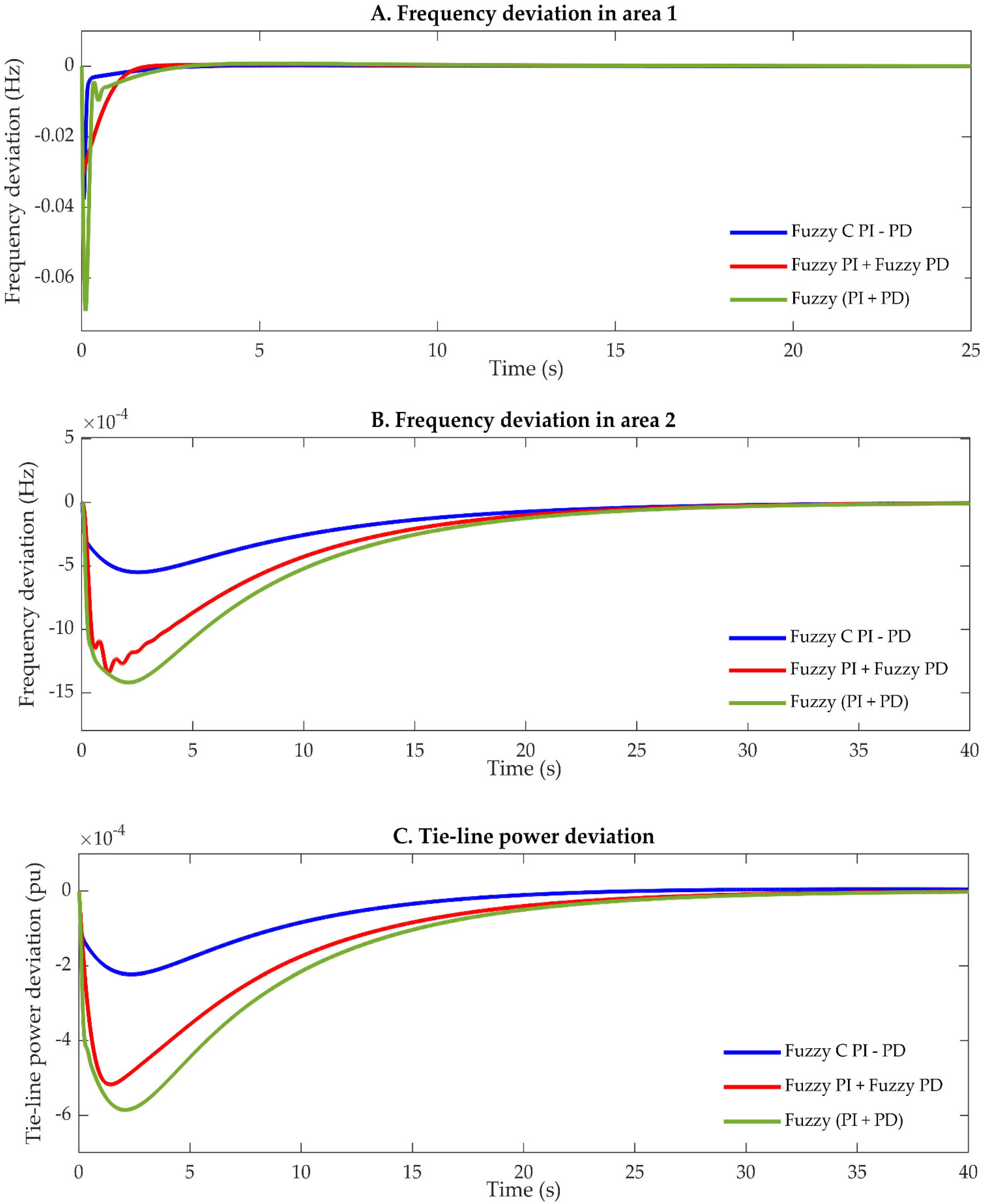
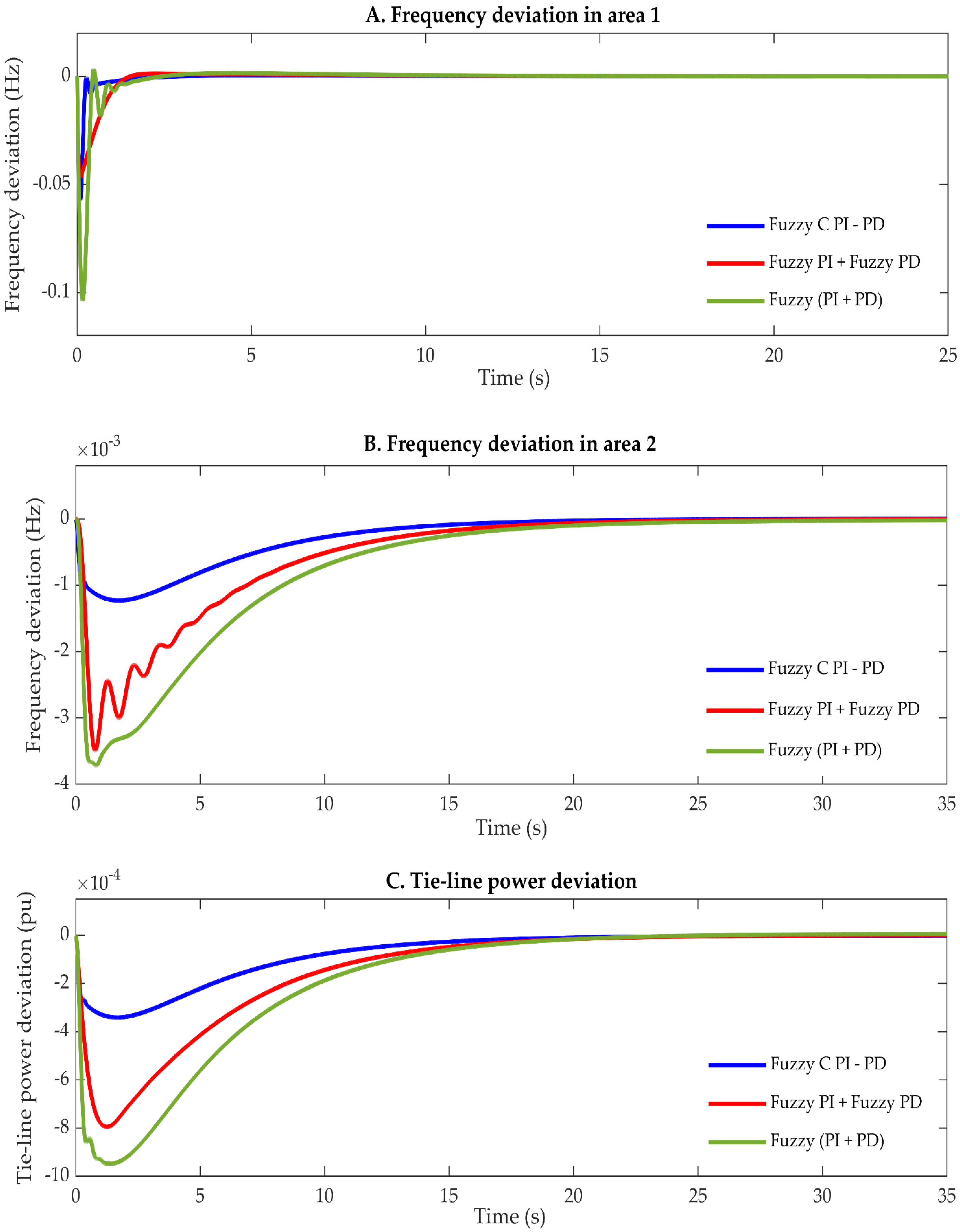
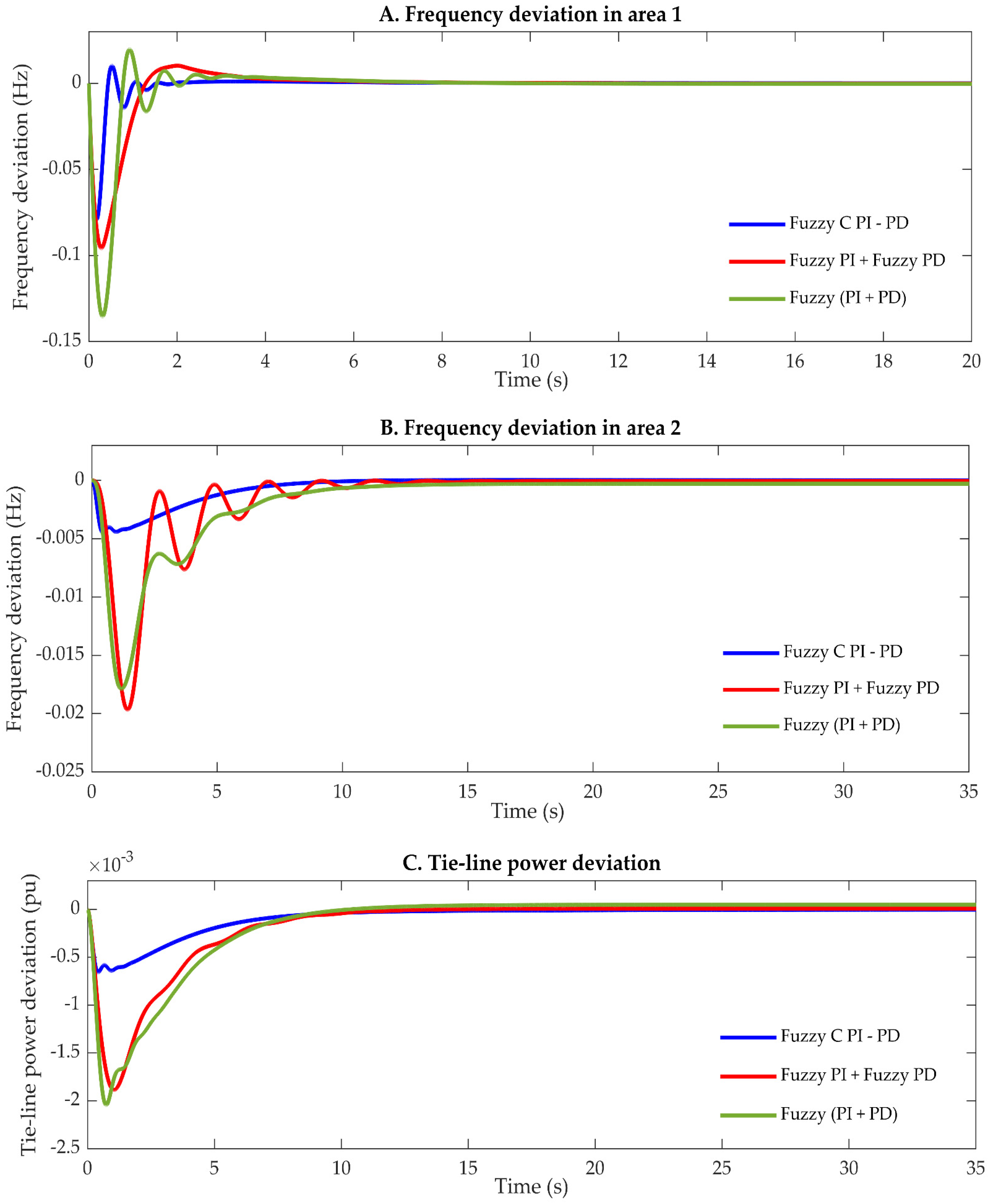
To investigate the performance of the proposed fuzzy control structures, a load disturbance with a magnitude of 0.2 pu is applied in area one at time
t = 0. The dynamic response of the system with the proposed controllers employed as the LFCs is demonstrated in
Figure 19,
Figure 20 and
Figure 21. The frequency deviation in area one
in (Hz) is given in
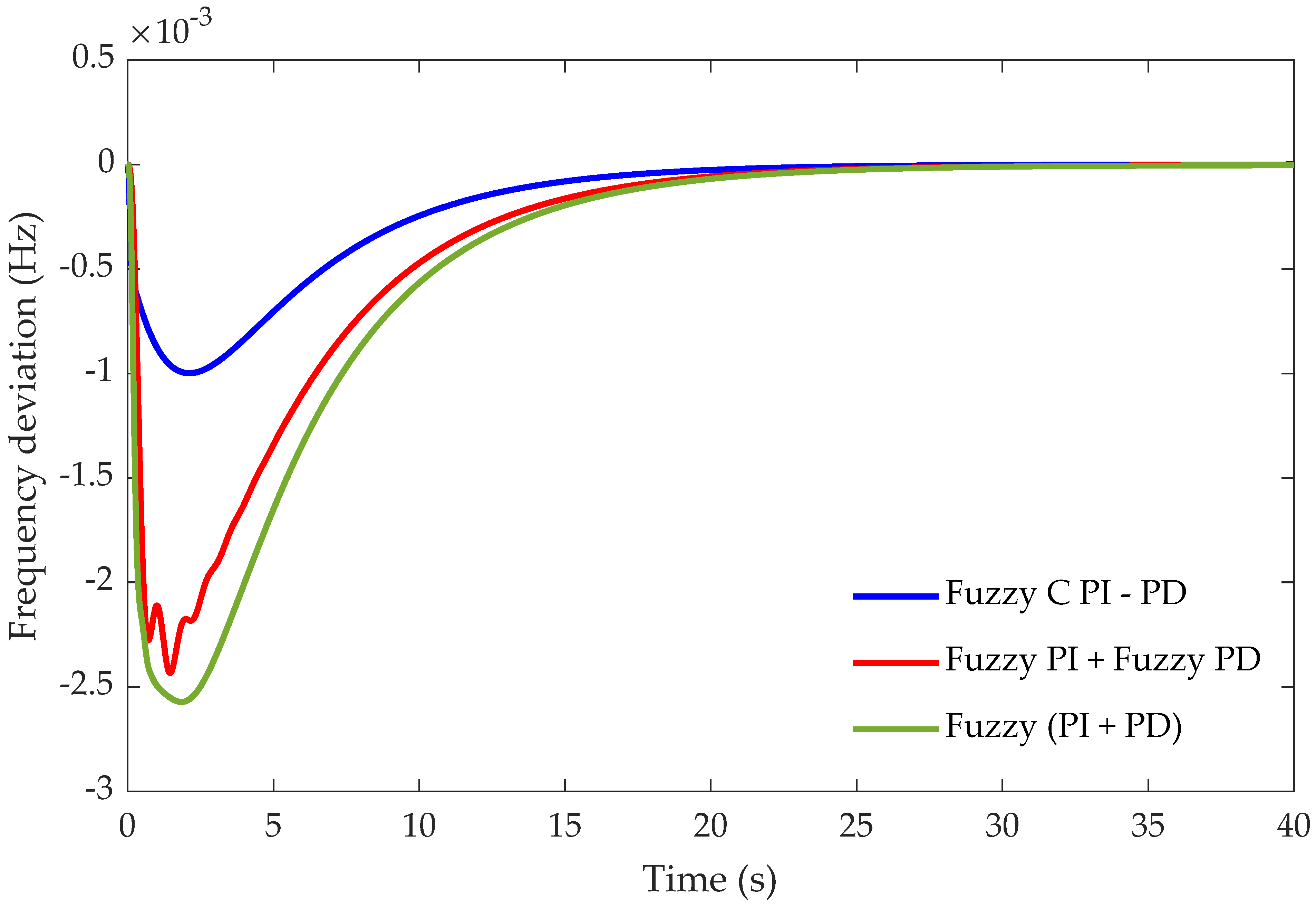
Figure 19; the frequency deviation in area two
in (Hz) is given in
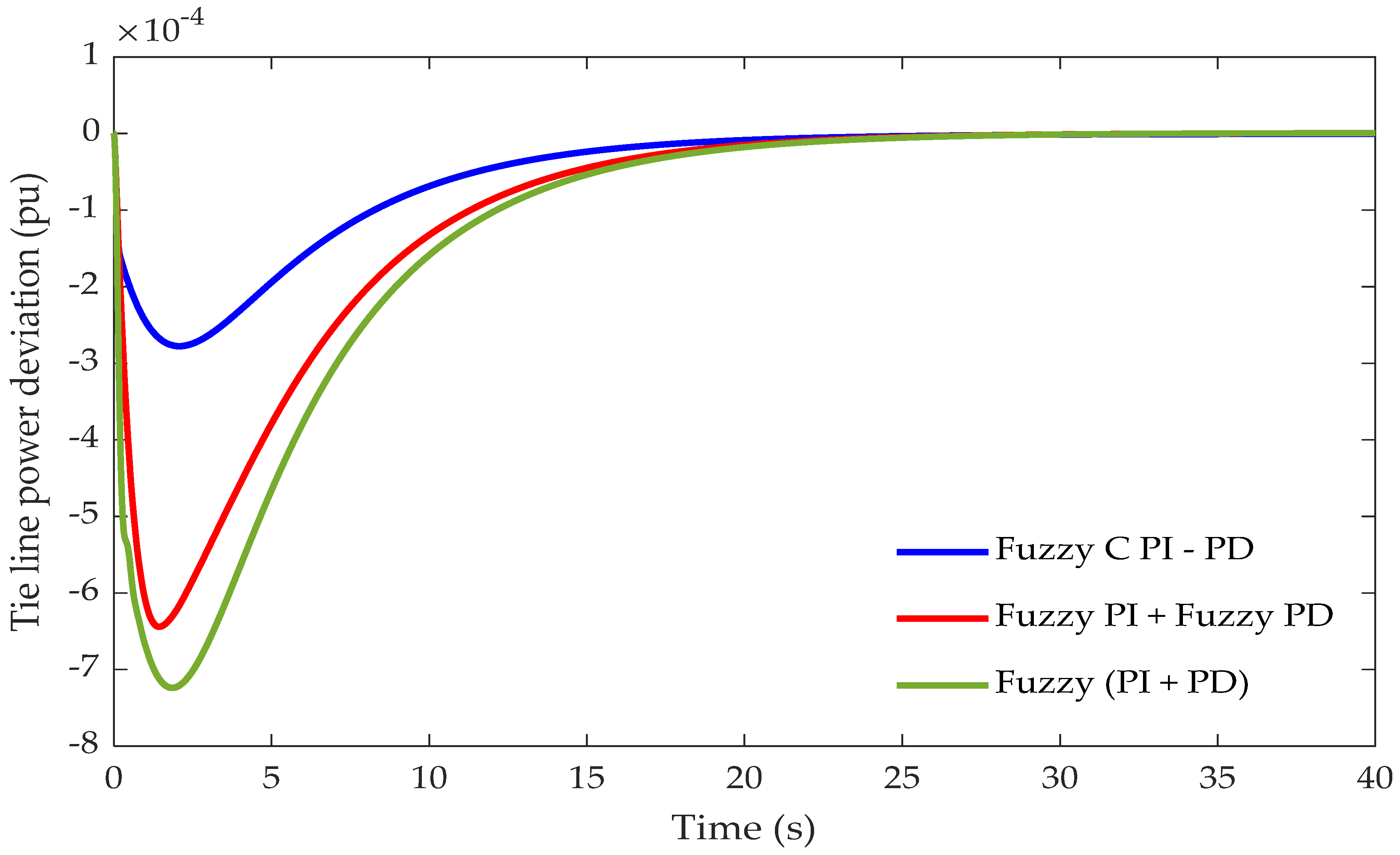
Figure 20; and the tie-line power deviation
in (pu) is illustrated in
Figure 21. Furthermore, the characteristics of the dynamic response represented by the peak undershoot
, the peak overshoot
, the settling time
and the values of the objective function are exemplified in
Table 10.
The obtained simulation results show that the steady-state responses with the proposed controllers are similar because the frequency variation in both areas and the tie-line power deviation are ceased to zero. However, in terms of the transient response, the least drop in the frequency recorded in area one, as a consequence of the implication of the load disturbance, is −0.0346 Hz; this is achieved based on the proposed Fuzzy PI plus Fuzzy PD structure. Observably, this controller offered the slowest response for
, with a 7.0632 s settling time. Furthermore, a negligible overshoot is observed in the dynamic response obtained based on the three suggested controllers. Regarding the drop in the frequency in area two, the proposed structures have provided satisfactory responses with a slight superiority of the Fuzzy C PI − PD over the other two structures. The tie-line power deviation of the system is illustrated in
Figure 21, where the supremacy of the Fuzzy C PI − PD over the other controllers is observed. Moreover, the value of the ITAE is the smallest for the Fuzzy C PI − PD tuned by the BA as compared with the other structures tuned by the same algorithm.
Based on the simulation results provided in
Figure 19,
Figure 20 and
Figure 21 and
Table 10, it is evidenced that the proposed fuzzy configurations are serving as effective solutions for the issue of LFC as they provide different advantages, such as fast response with neglectable overshoot and zero steady-state error. Importantly, based on their structures, these controllers offer a wide range of reliability.
7. Robustness Investigation of Fuzzy Cascade PI − PD, Fuzzy PI + PD, and Fuzzy PI plus Fuzzy PD
The investigated two-area power system has several parameters that may vary due to different operating conditions. This variation influences the stability of the system. For example, the increase in the governor time constant (Tg) results in an increase in the frequency deviation, while decreasing the damping ratio (D) may lead to increasing the frequency deviation of the system, which may bring about a possibility of system instability. Moreover, increasing the inertia time constant (H) can slow down the system. Therefore, the LFC system should have the required control action towards the parametric uncertainties of the controlled system and provide an acceptable level of robustness.
Accordingly, to assess the robustness of the proposed fuzzy control configurations tuned by the BA equipped as an LFC system in the dual-area power system, thirteen scenarios are assumed for the parametric uncertainties of the testbed system, as given in
Table 11. This assessment begins with individually varying each parameter in the system by (+ and −) 50% from their nominal values. As is understood, changing the parameters from their nominal values may have a positive impact on the overall system stability. Therefore, in order to make this analysis more credible, all the parameters are simultaneously varied from their nominal values. Accordingly, in case thirteen, we consider the negative impact of each parameter of uncertainty and change them simultaneously. This guarantees the assessment of the robustness in the worst scenario that the system may experience during the working time. An SLP of 0.2 pu is applied in area one to examine the effect of the system parametric uncertainties on the behavior of the Fuzzy C PI − PD, Fuzzy PI + PD, and Fuzzy PI plus Fuzzy PD; a comparative study is given based on the obtained results. Fuzzy control robustness analysis can also be carried out in different ways as investigated in [
32,
33,
34].
From case 1 to case 12 in
Table 11, only a single parameter is changed at a time by +50% and −50% from its nominal value. In case thirteen, the parameters Tg, Tt, H, and R in both areas are varied by 50%, while the parameters B and D are varied by −50%. The dynamic response of the system with the proposed controllers under parametric uncertainty conditions is demonstrated in
Figure 22,
Figure 23,
Figure 24,
Figure 25,
Figure 26,
Figure 27,
Figure 28,
Figure 29,
Figure 30,
Figure 31,
Figure 32,
Figure 33 and
Figure 34. Moreover, the characteristics of the transient response are depicted in
Table 12.
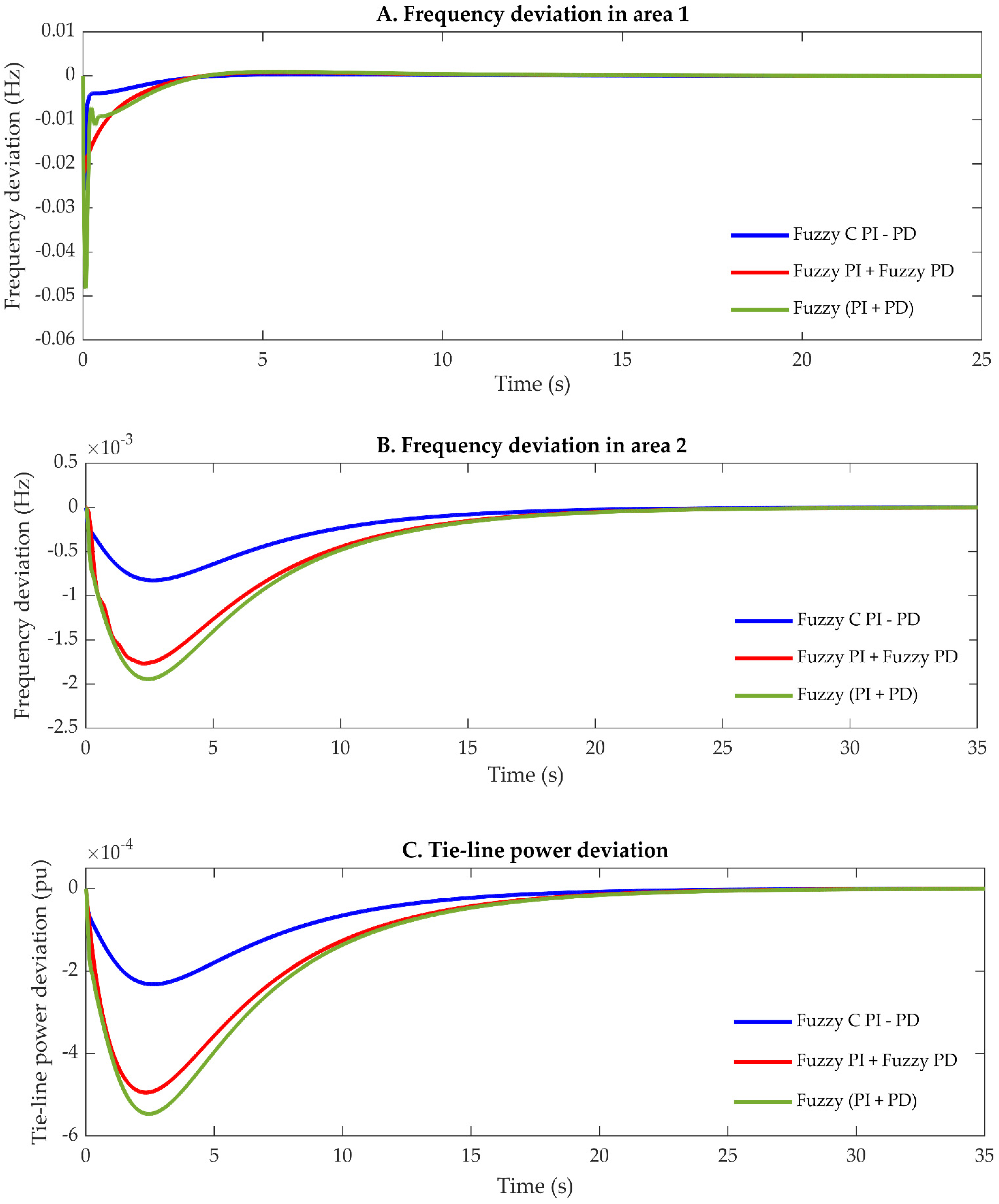
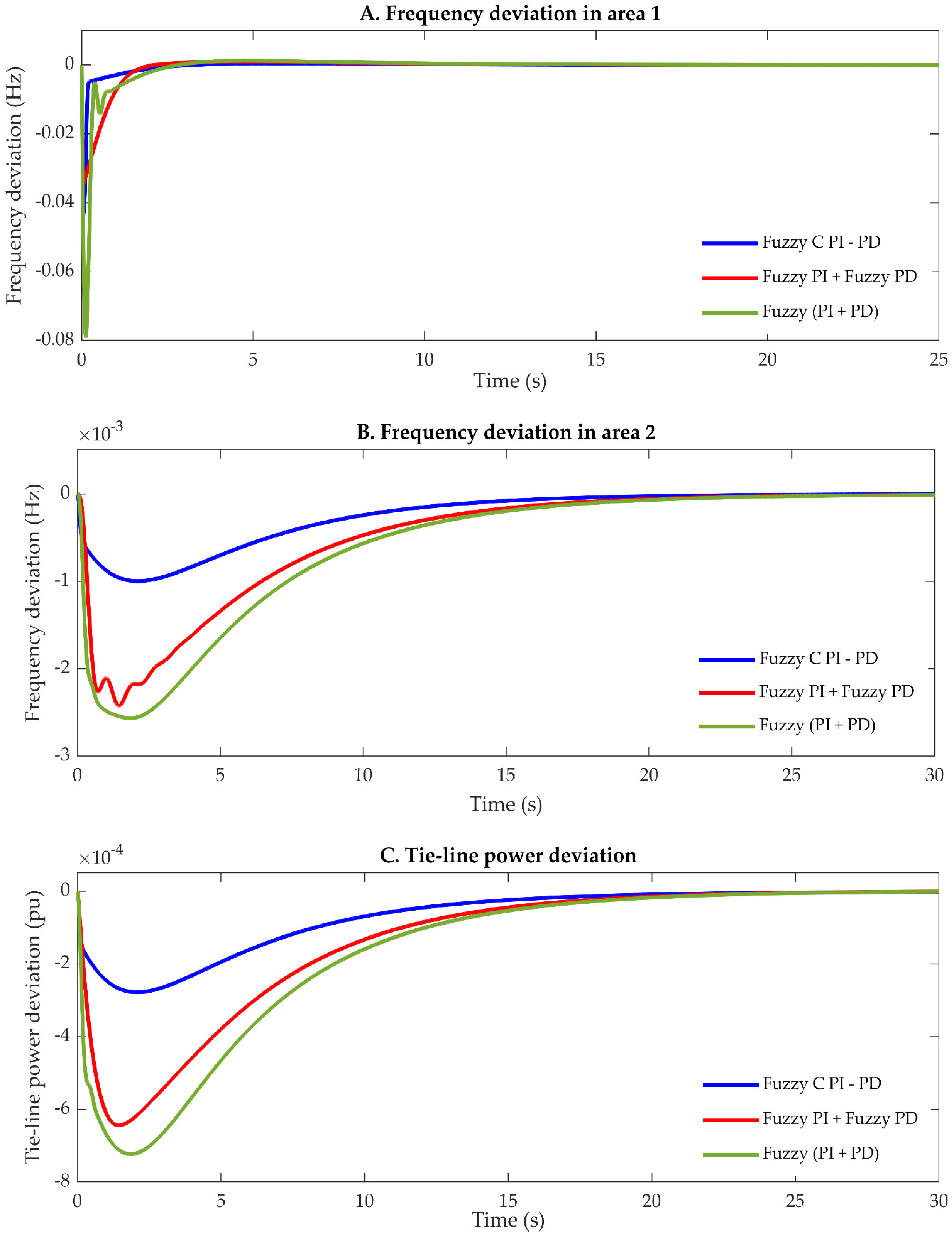
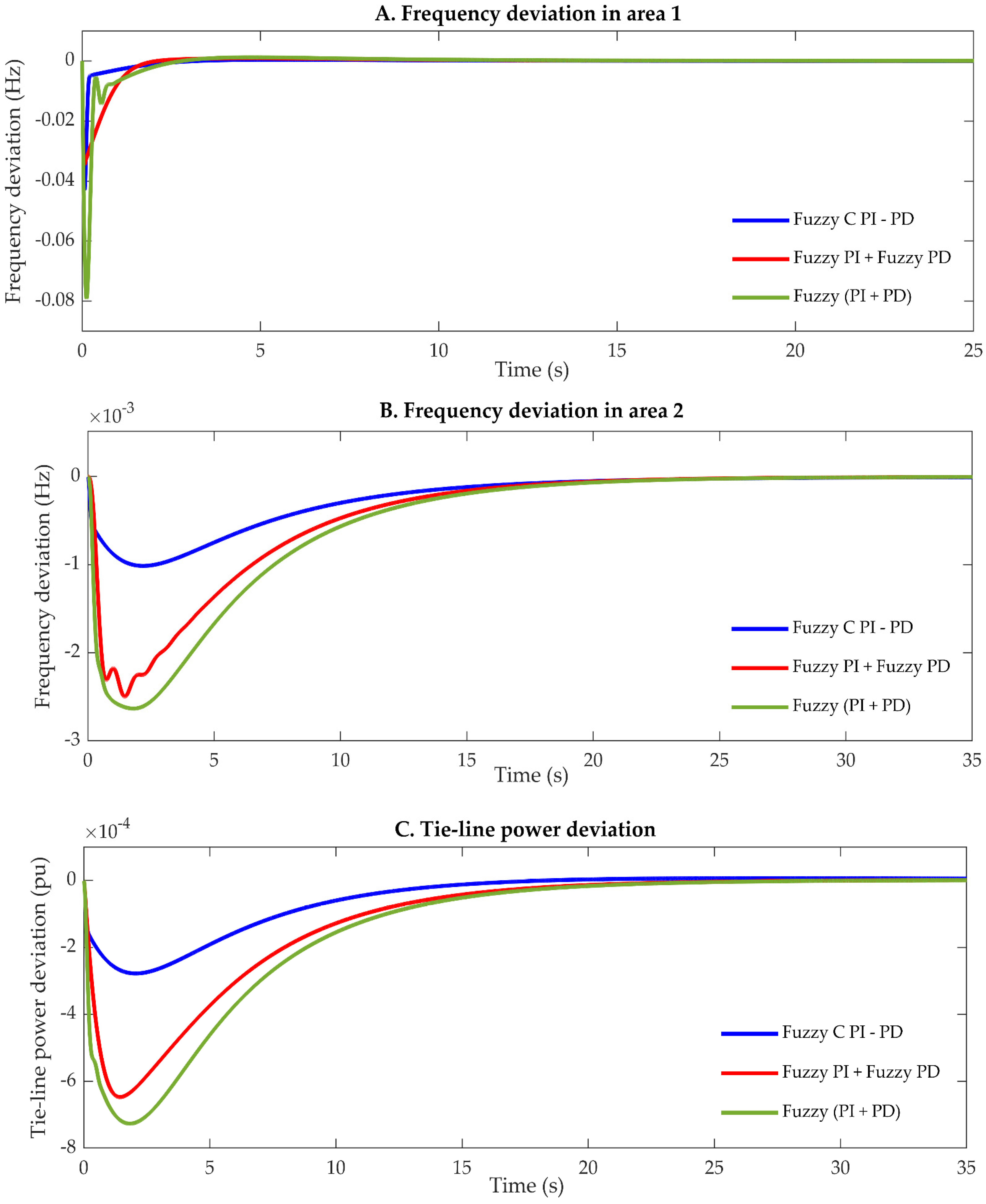
Figure 22 illustrates the dynamic behavior of the testbed system based on the proposed fuzzy control structures under parametric uncertainty case 1, where the inertia time constants in both areas are altered by +50% from their nominal values. It is noted that the increase in the time inertia has slowed the response of the system. For example, the settling time of the frequency in area one has increased from 2.1873 s, 7.0632 s, and 2.1384 s to 2.380 s, 7.768 s, and 2.305 s based on Fuzzy C PI − PD, Fuzzy PI plus Fuzzy PD, and Fuzzy PI + PD, respectively. The settling time of
and
follow the same pattern, where a slight increase is observed. Moreover, it is concluded that the increase in the inertia time constant has led to a slight decrease in the drop of the frequency in both areas. Conversely, the decrease in the inertia time constant which is considered in case 2 brings about a further drop in the frequency and the tie-line power deviation in the system. Moreover, it leads to a slight improvement in terms of the settling time in
,
, and
.
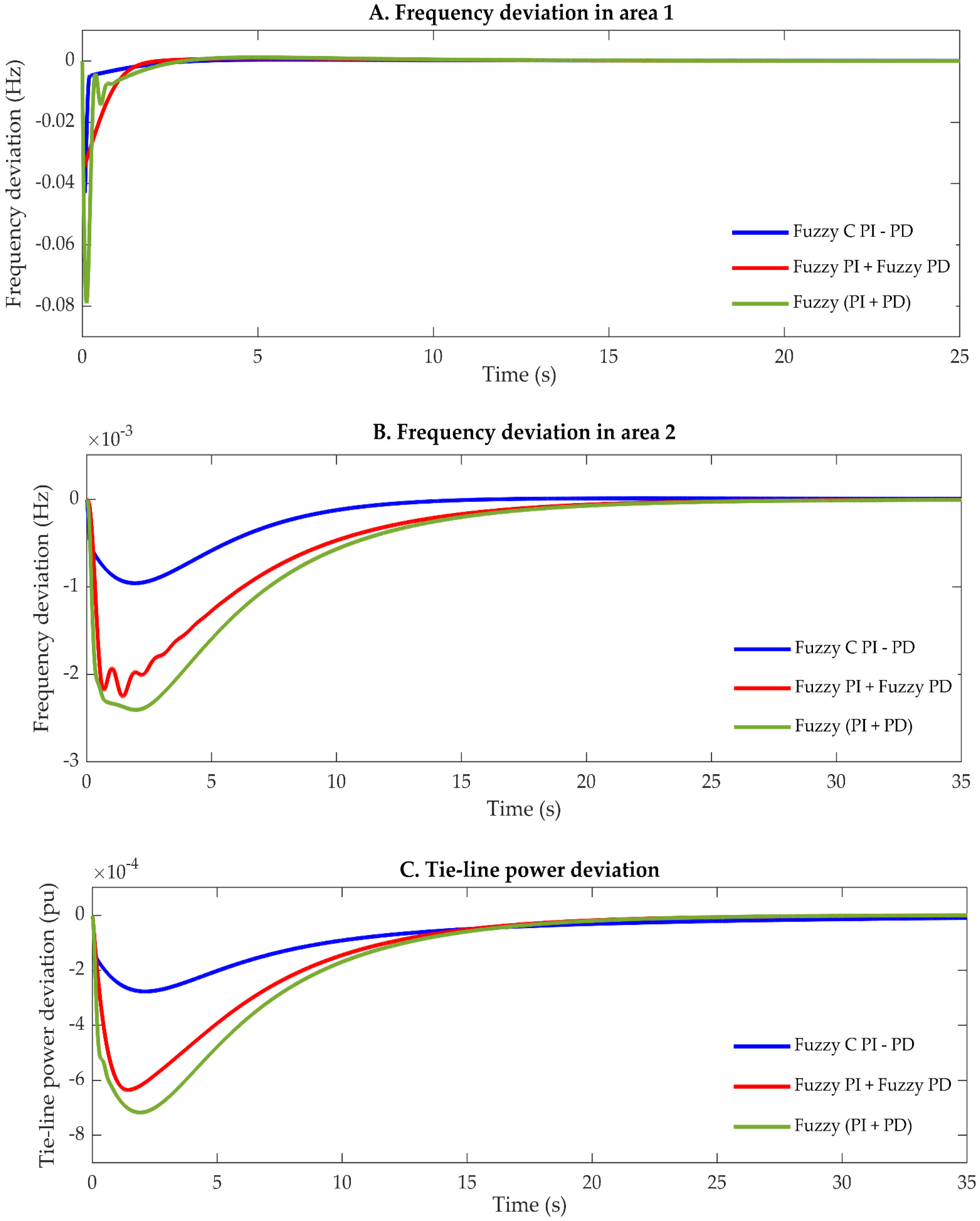
Figure 23 shows the dynamic performance of the system based on the proposed controllers under parametric uncertainty case 2.
The impact of uncertainty in the turbine time constant is investigated in case 3 and case 4.
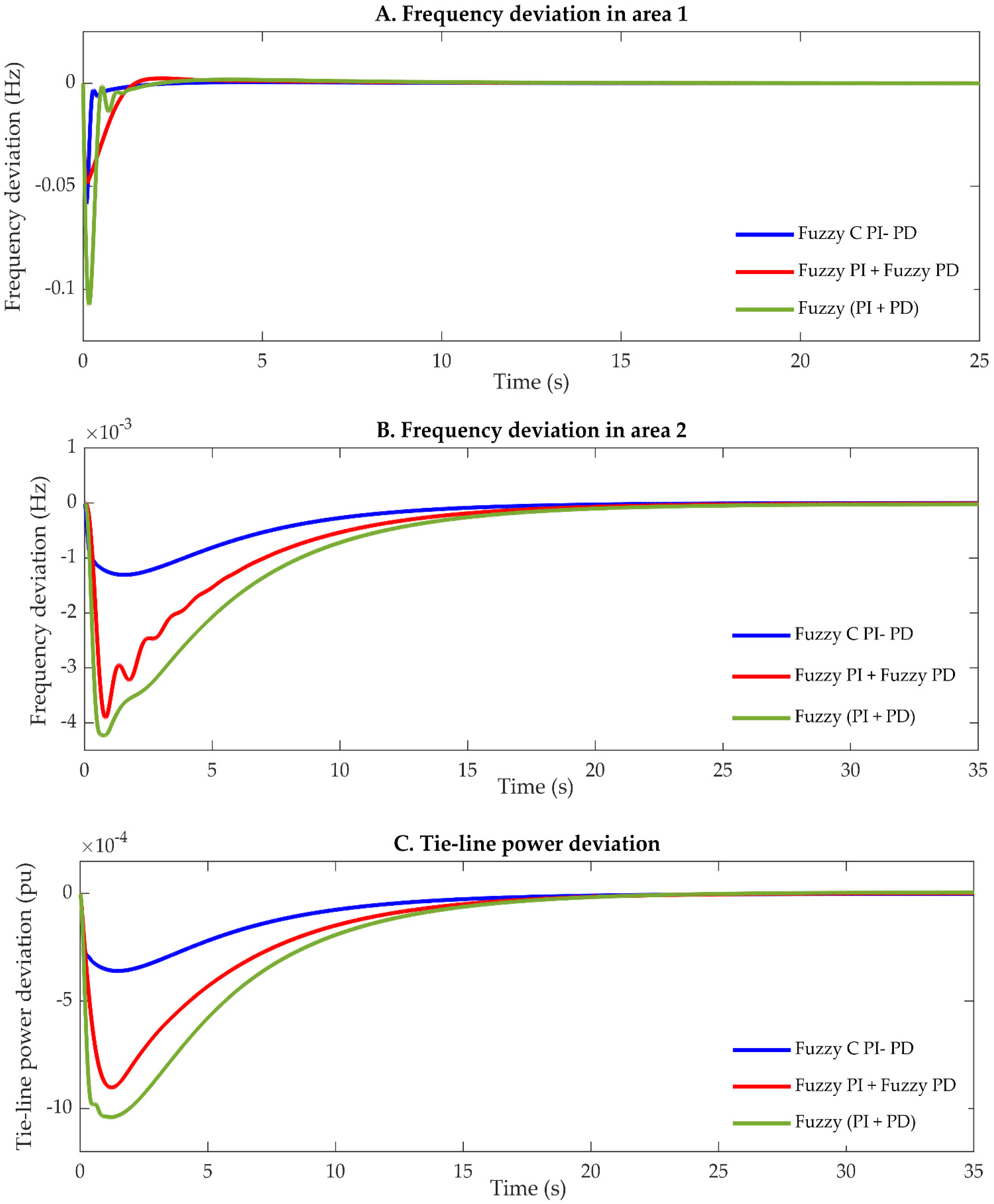
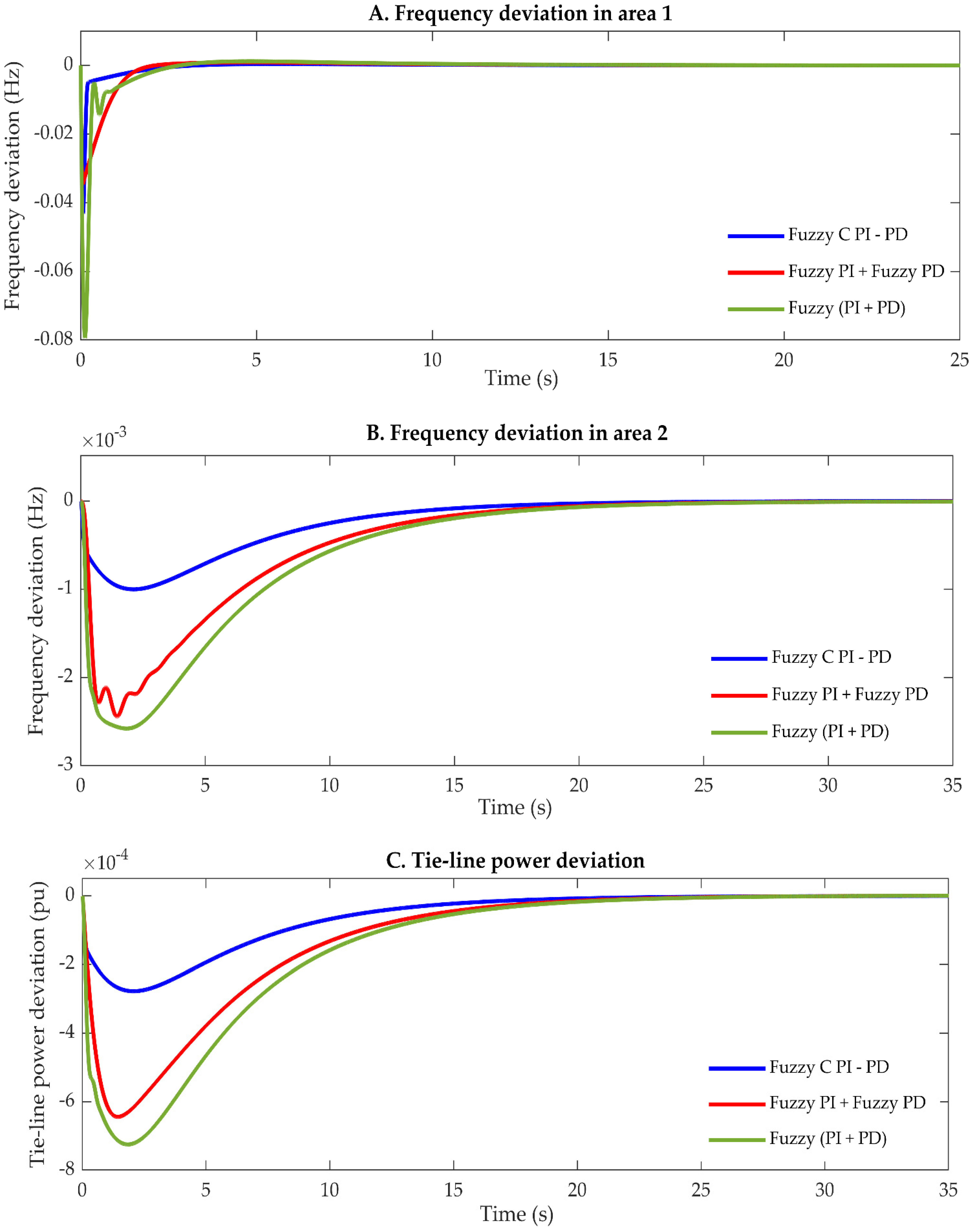
Figure 24 demonstrates the dynamic performance of the testbed system based on the proposed fuzzy configurations under parametric uncertainty case 3, where the turbine time constants in both areas are varied by +50% from their nominal values. From
Figure 24 and
Table 12, it is noticed that as a consequence of increasing the turbine time constants within the system, the drop in the frequency in area one (
) has jumped from −0.0431 Hz, −0.0346 Hz, and −0.0792 Hz to −0.0585 Hz, −0.0486 Hz, and −0.1074 Hz. While the drop of the frequency in area two (
) increased from −0.00099 Hz, −0.0024 Hz, and −0.0026 Hz to −0.0013 Hz, −0.0039 Hz, and −0.0042 Hz, based on Fuzzy C PI − PD, Fuzzy PI plus Fuzzy PD, and Fuzzy PI + PD, respectively. It is also obvious that due to the increase of the turbine time constant, the settling time of the
,
, and
has slightly decreased. In contrast, from
Figure 25, the decline in the turbine time constant brings about a decrease in the frequency deviation and slightly slows the system.
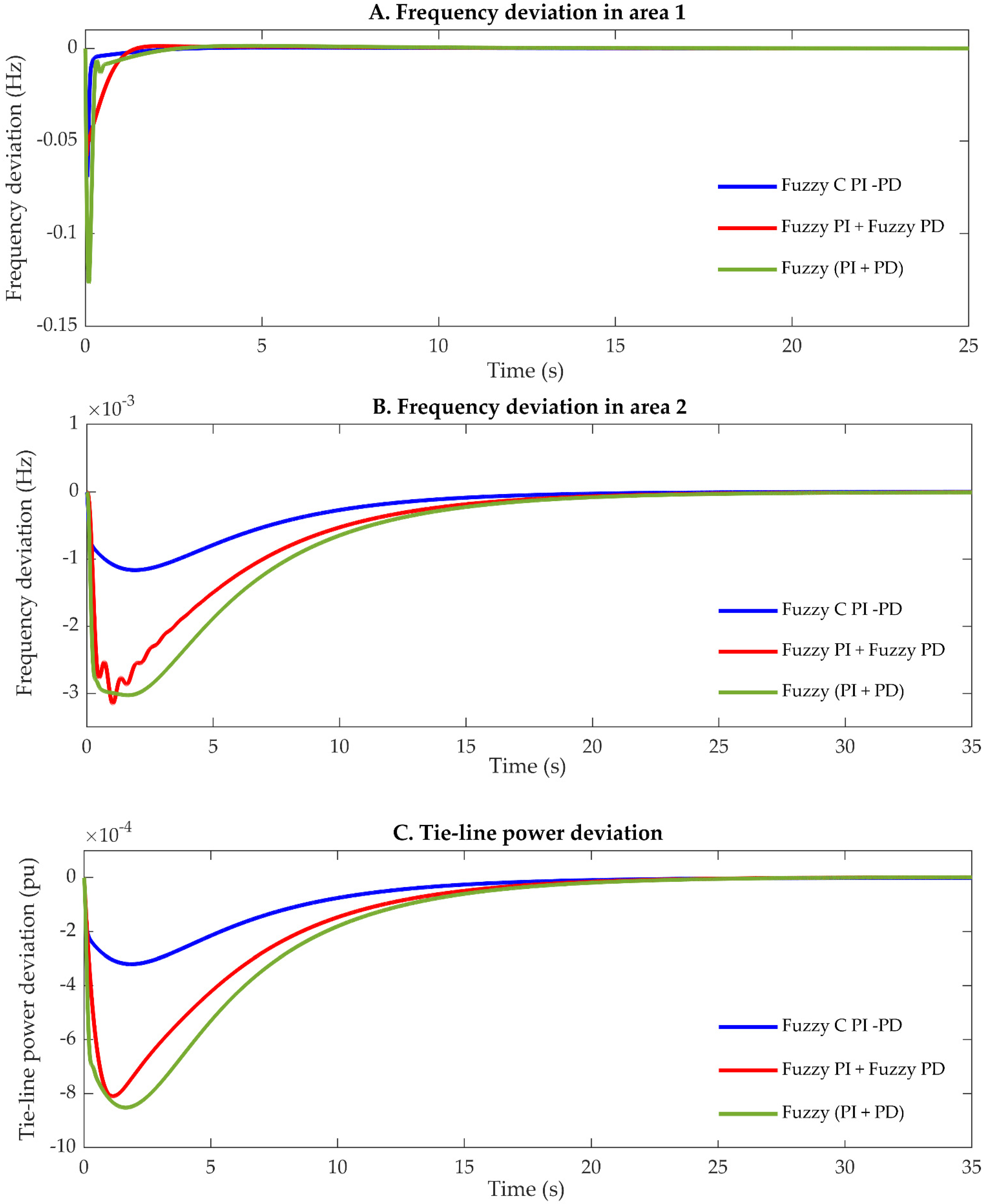
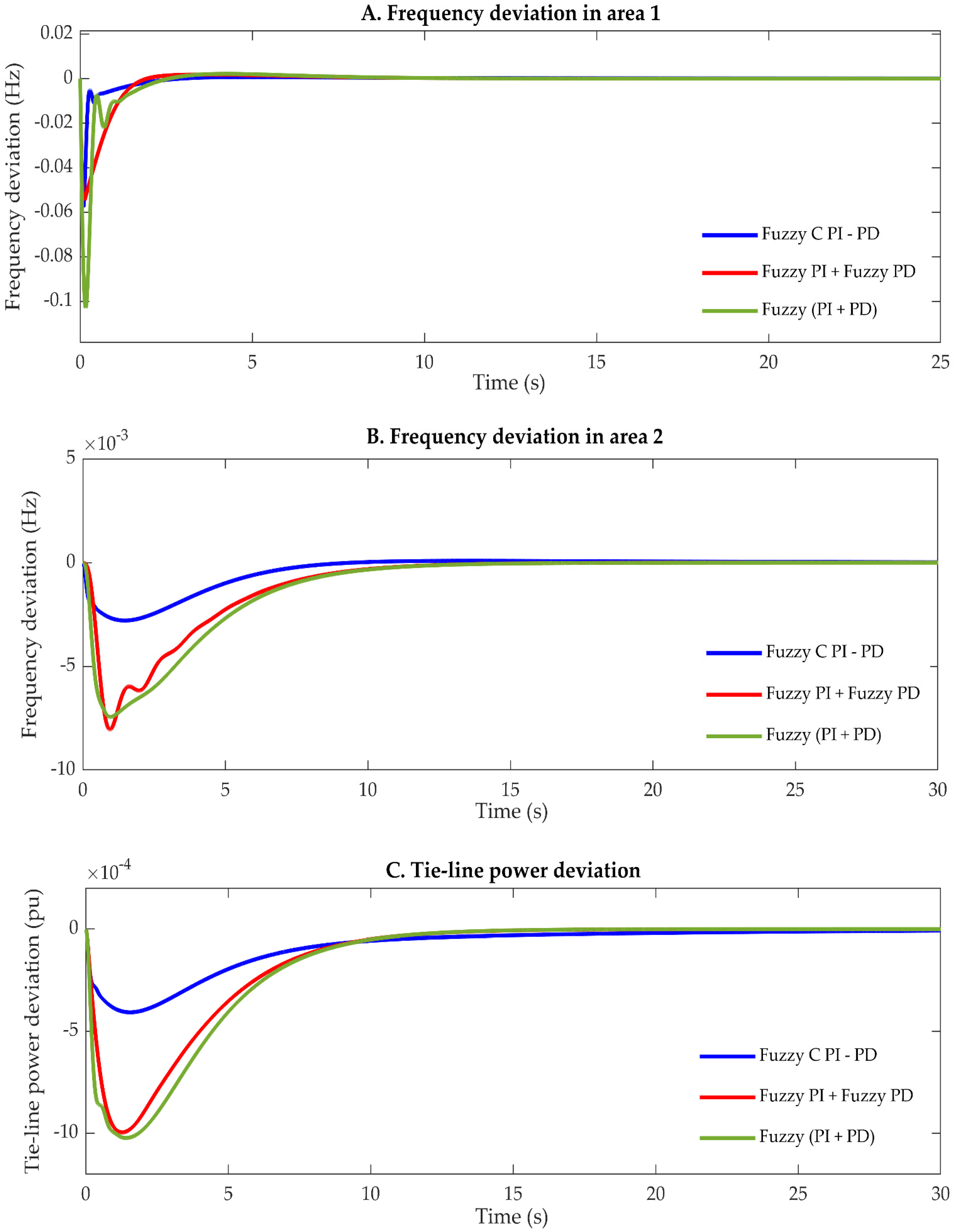
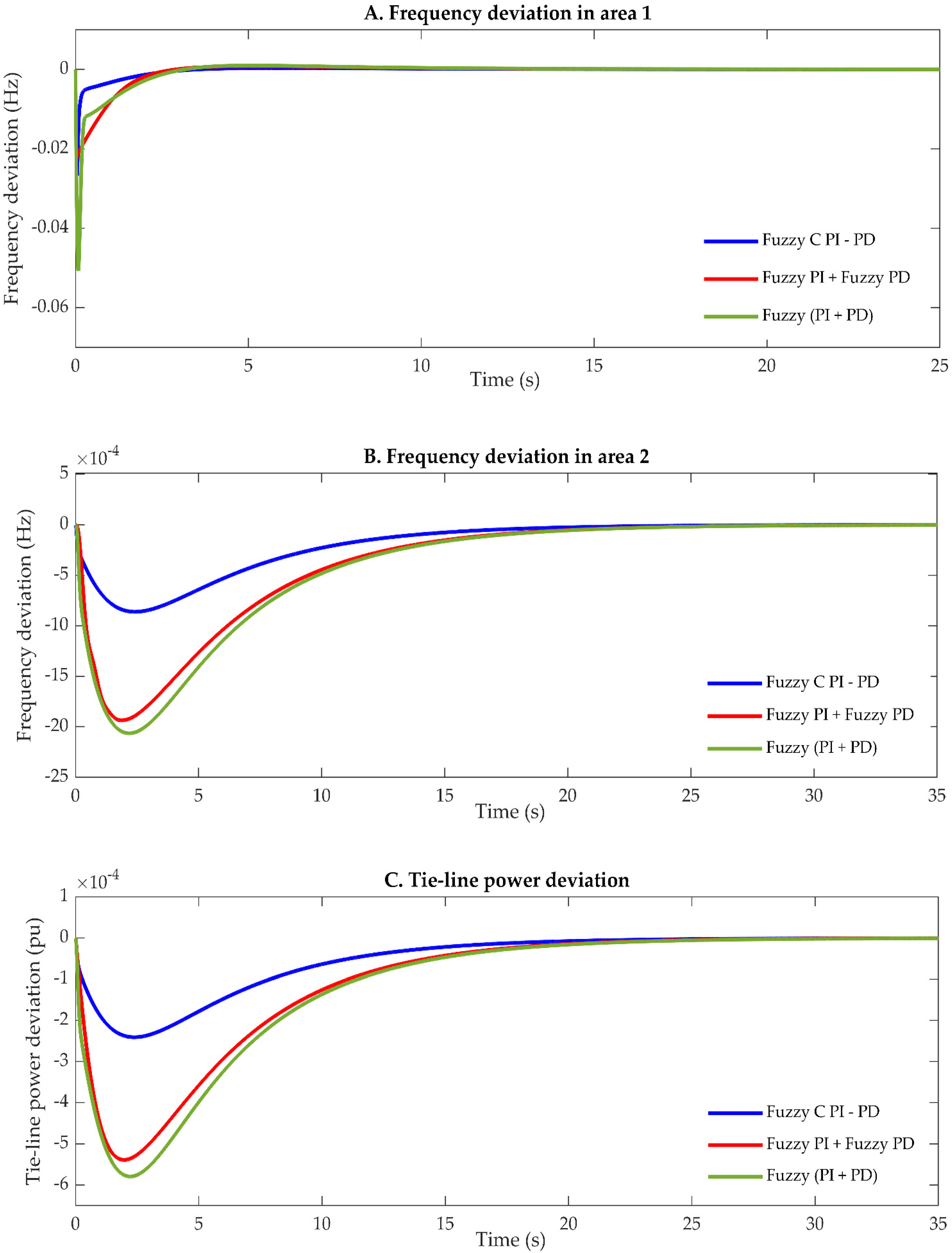
Figure 26 indicates the dynamic response of the system under parametric uncertainty case 5. In this case, the frequency bias in both areas is altered by +50%. It is noticed that the increase in frequency bias has marginally improved the dynamic response in terms of the drop in the frequency, where the maximum undershoot of the frequency in area one (
) has decreased from −0.0431 Hz, −0.0346 Hz, and −0.0792 Hz to −0.0377 Hz, −0.0307 Hz, and −0.0693 Hz, while the drop of the frequency in area two (
) declined from −0.00099 Hz, −0.0024 Hz, and −0.0026 Hz to −0.00054 Hz, −0.0013 Hz, and −0.0014 Hz, based on Fuzzy C PI − PD, Fuzzy PI plus Fuzzy PD, and Fuzzy PI + PD, respectively. With regard to the influence of decreasing the frequency bias on the stability of the power systems which are considered in case 6 and illustrated in
Figure 27, it is obvious that the decrease in the frequency bias has slightly worsened the dynamic response of the system in terms of the frequency variation, where it is noted that the maximum undershoot of the frequency in area one has increased from −0.0431 Hz, −0.0346 Hz, and −0.0792 Hz to −0.0577 Hz, −0.0546 Hz, and −0.1029 Hz, while the drop of the frequency in area two (
) increased from −0.00099 Hz, −0.0024 Hz, and −0.0026 Hz to −0.0028 Hz, −0.0080 Hz, and −0.0074 Hz, based on Fuzzy C PI − PD, Fuzzy PI plus Fuzzy PD, and Fuzzy PI + PD, respectively.
The influence of uncertainty in the damping constant (D) is investigated in cases 7 and 8.
Figure 28 and
Figure 29 demonstrate the dynamic performance of the testbed system based on the proposed fuzzy structures under the parametric uncertainty conditions of cases 7 and 8, where the damping constants (D) in both areas are varied by +50% and −50% from their nominal values. Due to the change in this parameter, a negligible change in the dynamic performance of the system is observed based on these cases as compared with the results obtained using the nominal conditions.
The uncertainty in the governor time constant (Tg) has a similar impact of uncertainty as the turbine time constant on the stability of the system in terms of frequency variation and the speed of the response.
Figure 30 reveals the dynamic performance of the dual-area power system when the proposed fuzzy structures are employed as LFCs in the system with the consideration of parametric uncertainty case 9, where the governor time constants in both areas are varied by +50% from their nominal values. As a result of uncertainty in the governor time constants within the system, the drop in the frequency in area one (
) has incremented from −0.0431 Hz, −0.0346 Hz, and −0.0792 Hz to −0.0573 Hz, −0.0468 Hz, and −0.1038 Hz, while the drop in the frequency in area two (
) increased from −0.00099 Hz, −0.0024 Hz, and −0.0026 Hz to −0.0012 Hz, −0.0035 Hz, and −0.0037 Hz, based on Fuzzy C PI − PD, Fuzzy PI + PD, and Fuzzy PI plus Fuzzy PD, respectively. Moreover, the settling time of
decreased from 2.1873 s, 7.0632 s, and 2.1384 s to 1.724 s, 5.788 s, and 1.7013 s, based on Fuzzy C PI − PD, Fuzzy PI plus Fuzzy PD, and Fuzzy PI + PD, respectively. The dynamic response of the system under parametric uncertainty case 10 is illustrated in
Figure 31. In this case of robustness analysis, the governor time constants in both areas are varied by −50% from their nominal values. The results obtained based on case 10 revealed that the decrease in the governor time constant results in a clear decrease in the frequency variation and tie-line power deviation.
Figure 32 and
Figure 33 show the dynamic response of the testbed system for parametric uncertainties in case 11 and case 12, respectively. In case 11, the regulation constant in both areas is varied by +50% while it is altered by −50% in case 12. The obtained results based on cases 12 and 13 demonstrate that the uncertainty in the regulation constant has a small impact on the system stability when the proposed fuzzy controllers are equipped in the system for load frequency control.
The worst drop in frequency in both areas (
) and (
), as well as in the tie-line power deviation (
), is recorded based on the results obtained from case 13 of the robustness analysis, as shown in
Figure 34, where the drop of the frequency in area one has increased from −0.0431 Hz, −0.0346 Hz, and −0.0792 Hz to −0.0791 Hz, −0.0958 Hz, and −0.1354 Hz. The drop of the frequency in area two increased from −0.00099 Hz, −0.0024 Hz, and −0.0026 Hz to −0.0045 Hz, −0.0197 Hz, and −0.0179 Hz, whilst the maximum overshoot of the tie-line power deviation increased from −0.00027 pu, −0.00064 pu, and −0.00072 pu to −0.00065 pu, −0.0019 pu, and −0.0020 pu, based on Fuzzy C PI − PD, Fuzzy PI plus Fuzzy PD, and Fuzzy PI + PD, respectively.
From
Figure 22,
Figure 23,
Figure 24,
Figure 25,
Figure 26,
Figure 27,
Figure 28,
Figure 29,
Figure 30,
Figure 31,
Figure 32,
Figure 33 and
Figure 34 and
Table 12, despite the wide range of parametric uncertainties of the investigated two-area system in the thirteen considered scenarios, the implementation of the three fuzzy control configurations tuned by the BA suggested in this study has shown an excellent level of robustness which preserved the stability of the system within acceptable limits. Furthermore, although there is the similarity of the performance of the proposed configurations, it is obvious that the proposed Fuzzy C PI − PD and Fuzzy PI plus Fuzzy PD have outperformed the Fuzzy PI + PD in all aspects.
8. Conclusions
This study proposes a design and implementation of a Fuzzy PID with a filtered derivative action (Fuzzy PIDF) for the LFC to enhance the stability of a dual-area interconnected power system. The TLBO, PSO, and BA optimization tools were utilized to obtain the optimum values of the proposed controller parameters by reducing the ITAE objective function. A disturbance of 0.2 pu was subjected in area one to study the dynamic performance of the testbed system. The results obtained from the suggested Fuzzy PIDF controller employed for the LFC in the investigated system have been compared with those of previously published studies based on the classical PID and another design of Fuzzy PID. The obtained results revealed that the Fuzzy PIDF provides better dynamic performance as it gives the best objective function values and less undershoot for frequency and tie-line power in comparison with other controllers proposed in previous studies. For example, based on the Fuzzy PIDF tuned by the BA results, as compared with the results based on the classical PID tuned by the LCOA reported in previous study, the peak undershoot and the settling time of the frequency deviation in area one were improved by 90.345% and 40.698%, respectively, while the same characteristics of the frequency deviation in area two were improved by 94.277% and 8.403%, respectively. Furthermore, notwithstanding a wide range of variations in the power system parameters and implementing random load disturbance, it is proven that the Fuzzy PIDF is robust and has successfully kept the system stable. It is also concluded that the BA, PSO, and TLBO have demonstrated to be effective techniques for soft computing (TLBO to a lesser extent as the LFC system with Fuzzy PIDF based on the TLBO is less robust against the system parametric uncertainties in comparison with the Fuzzy PIDF tuned by the BA and PSO).
This study was further extended to propose three other fuzzy configurations for the LFC. Namely, Fuzzy Cascade PI − PD (Fuzzy C PI − PD), Fuzzy PI plus Fuzzy PD (Fuzzy PI + Fuzzy PD), and Fuzzy (PI + PD). These configurations have shown several strengths in their performance. For example, in addition to offering a robust control action with a quick response, they guarantee a higher range of reliability as compared with other structures. The Bees Algorithm was employed to find the optimum values of the scaling factor gains of the suggested configurations. An extensive examination of the impact of the parametric uncertainties of the testbed system on the performance of the proposed fuzzy control structures was conducted considering different scenarios that the system may experience in real-time operation. The obtained results based on these three structures showed that the lowest drop of the frequency in area one was −0.0431 Hz, which was achieved by the proposed Fuzzy PI + Fuzzy PD, while the lowest drop of frequency in area two was −0.00099 Hz, which was obtained by employing Fuzzy C PI − PD. The simulation results revealed that the proposed fuzzy controllers showed a high level of robustness towards the parametric uncertainties of the two-area power system (Fuzzy (PI + PD) to a lesser extent).
This research may be further extended in future work in two directions:
To assess the validity of the proposed fuzzy structures as LFCs in power systems that comprise Renewable Energy Resources (RESs) and to assess the impact of some nonlinear aspects within the system, such as the Governor Dead Band (GDB) and the Generation Rate Constraint (GRC) on the behavior of the suggested controllers.
Due to the supremacy of the Fractional Order PID controller over the traditional PID, it may be worth investigating the possible improvement on the performance of the proposed structures if the fractional-order scheme is used instead of the traditional PI − PD. Moreover, an extra improvement might be achieved if another optimization technique is used to tune the parameters of the proposed fuzzy configurations.








































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}