
Development and Testing of a Modular Sunlight Transport System Employing Free-Form Mirrors

 , ,
, ,
Abstract
:1. Introduction
2. Methodology
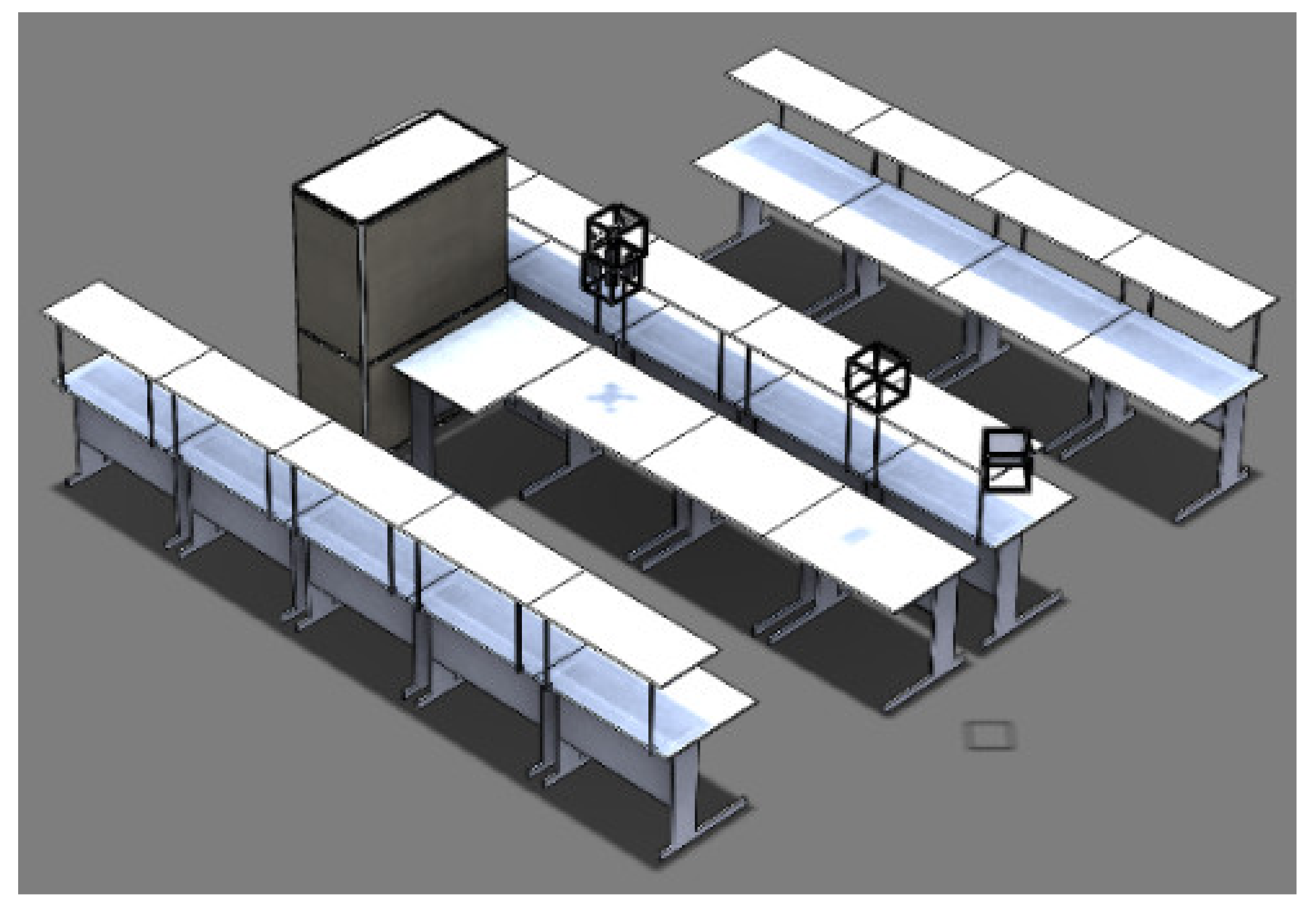
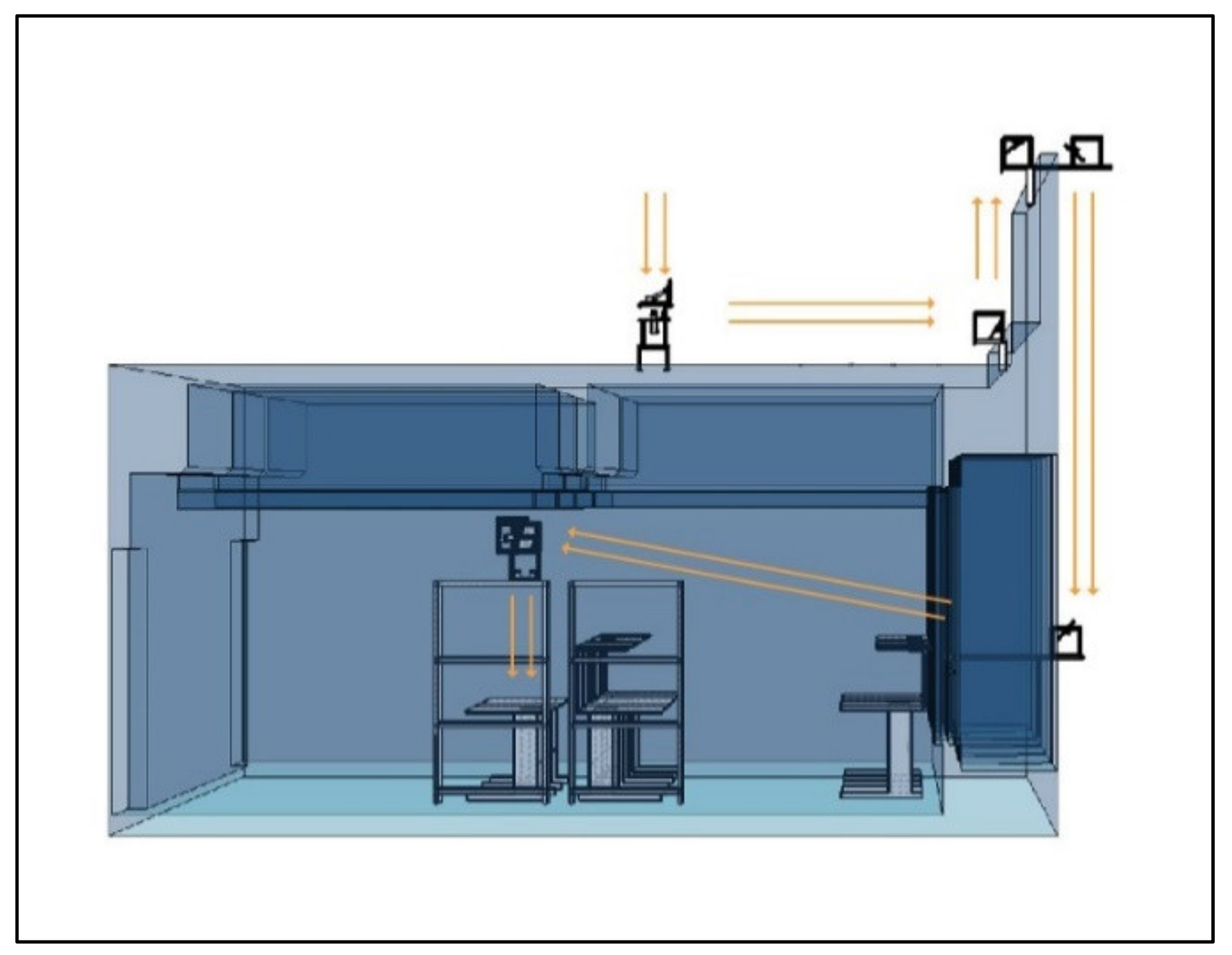
2.1. Field and Optical Path Planning
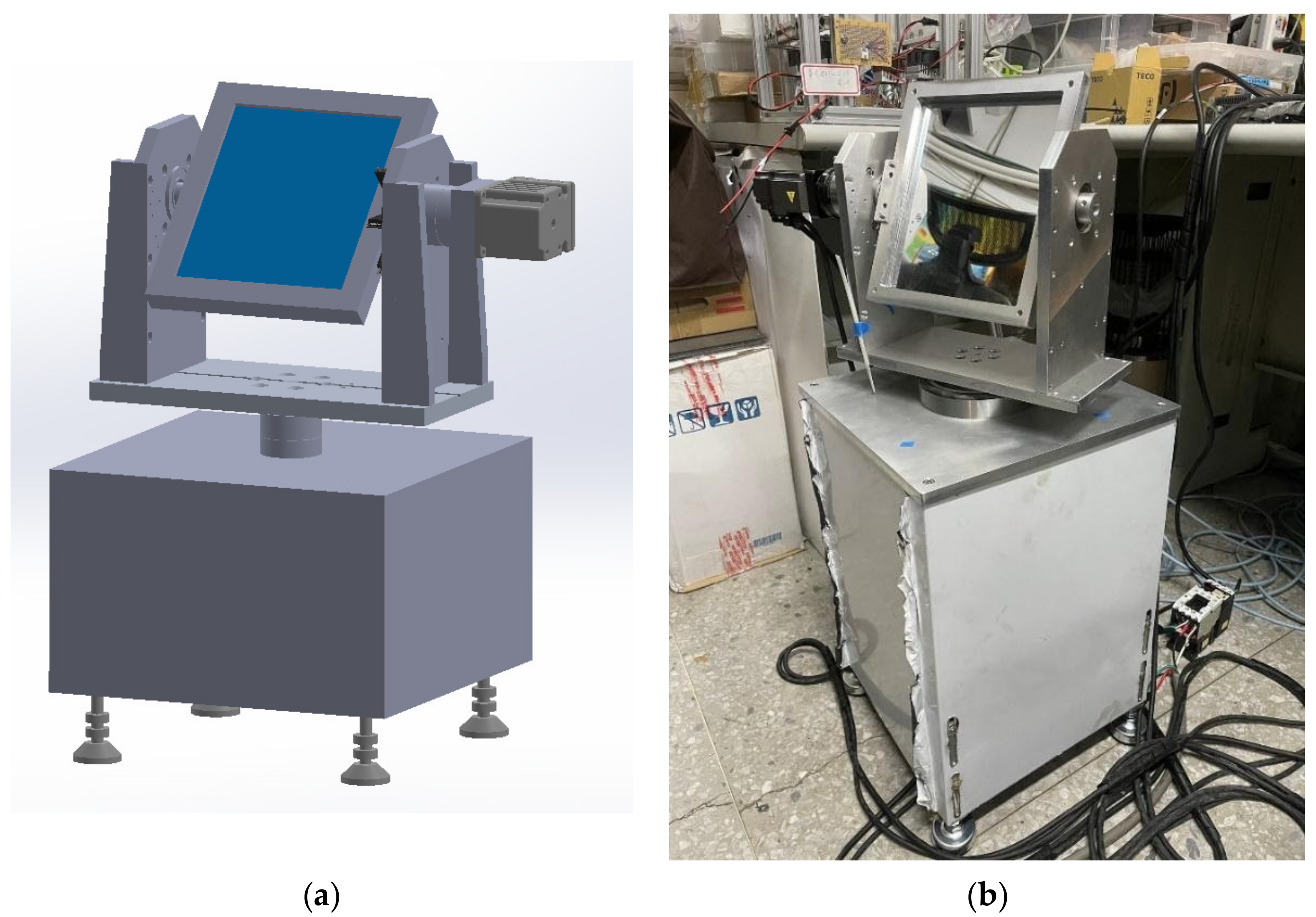
2.2. Mechanical Design
2.3. Control and Communication Design
3. Optical Module Design and Manufacturing Planning
3.1. Deformation Correction and Illuminance Regression
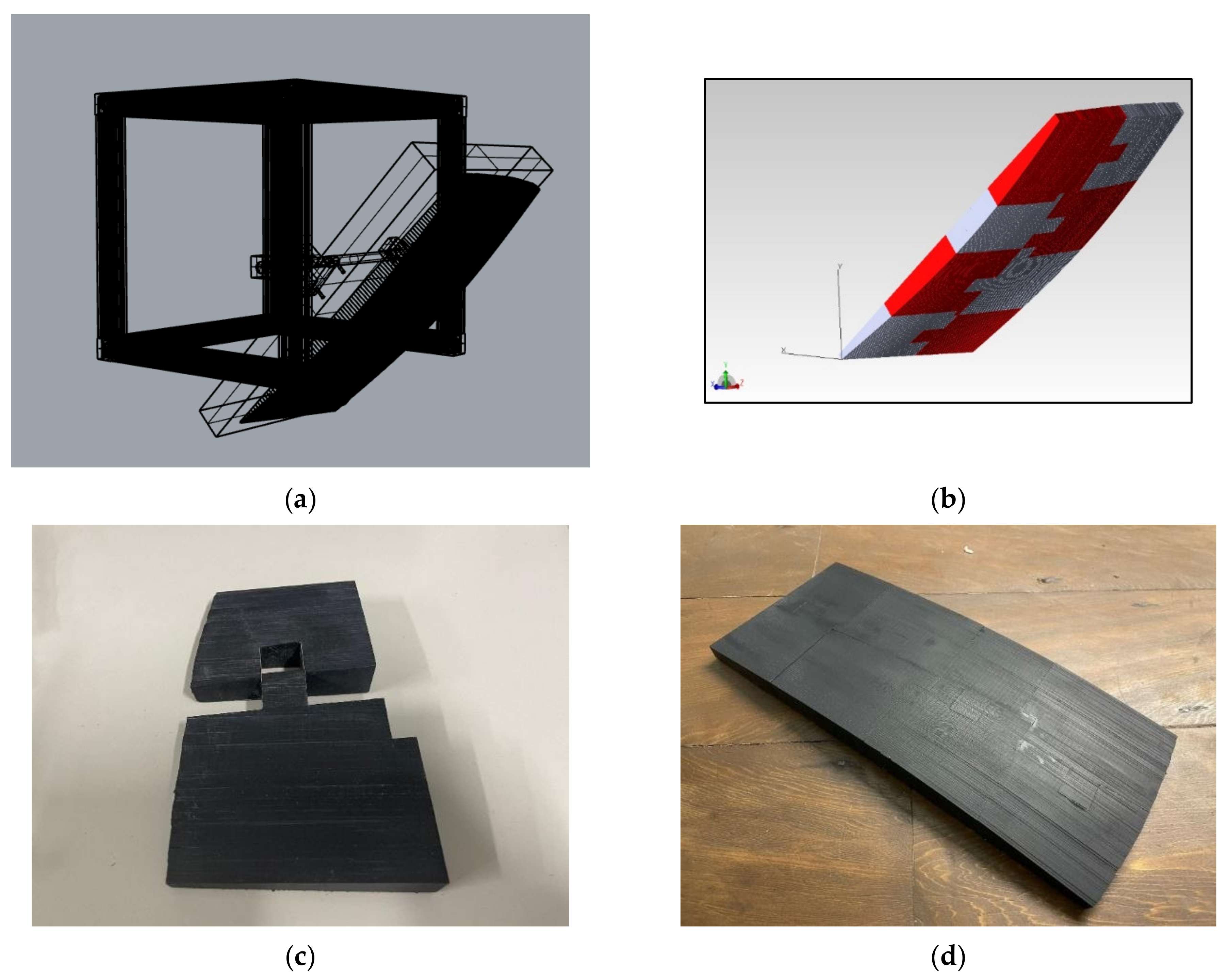
3.2. Manufacturing and Installation
4. Simulation and Measurement Results
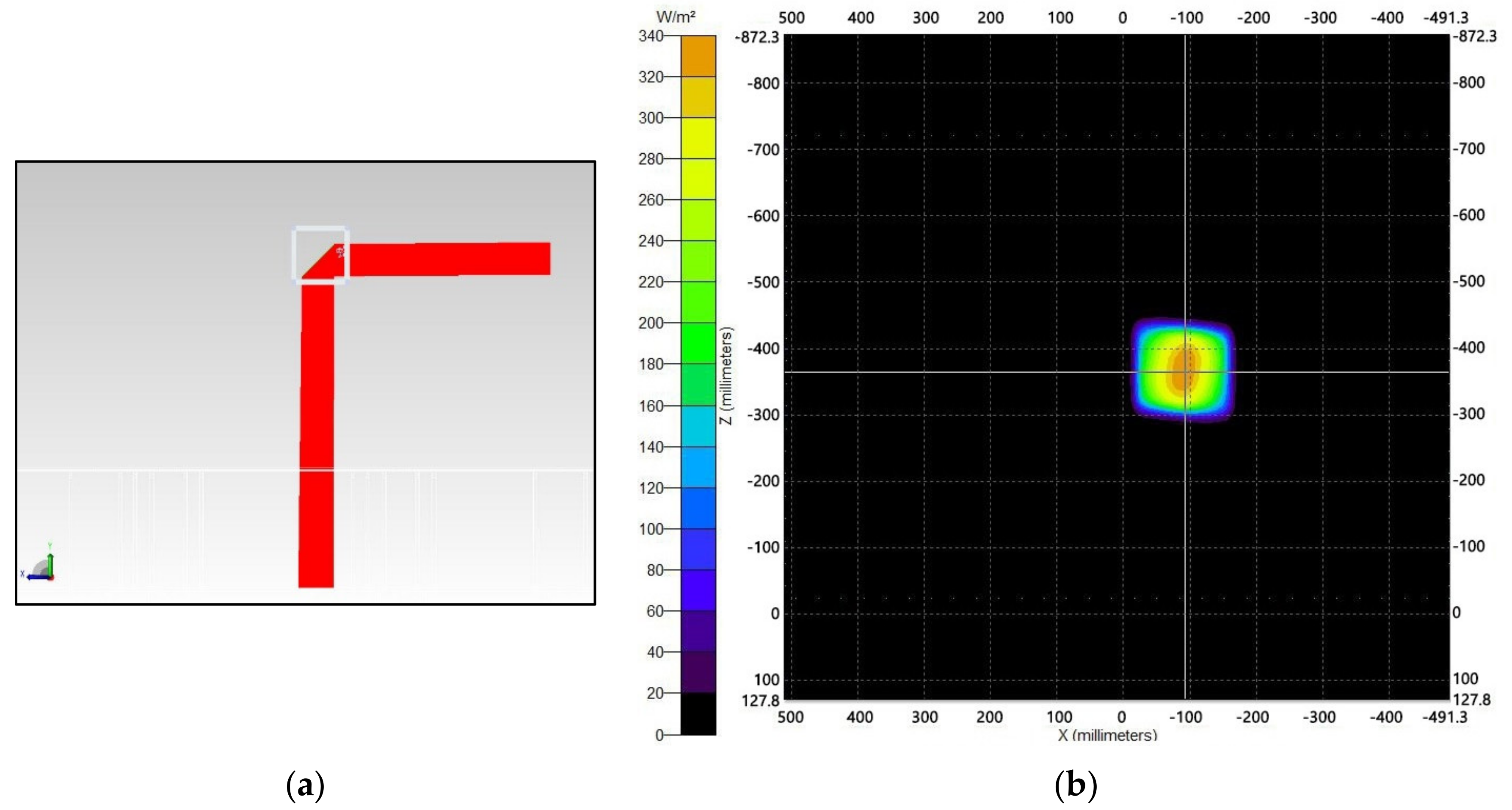
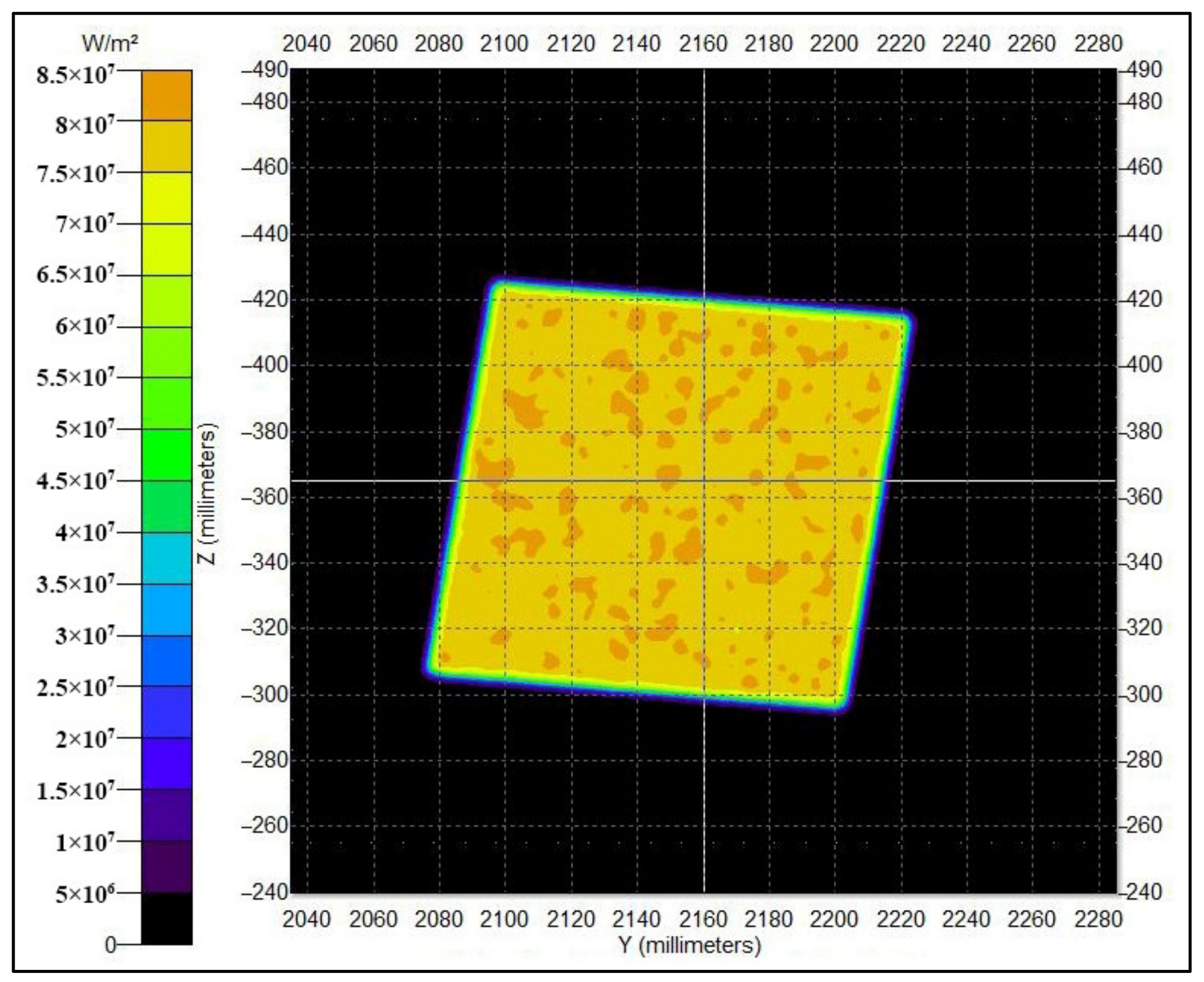
4.1. Simulation
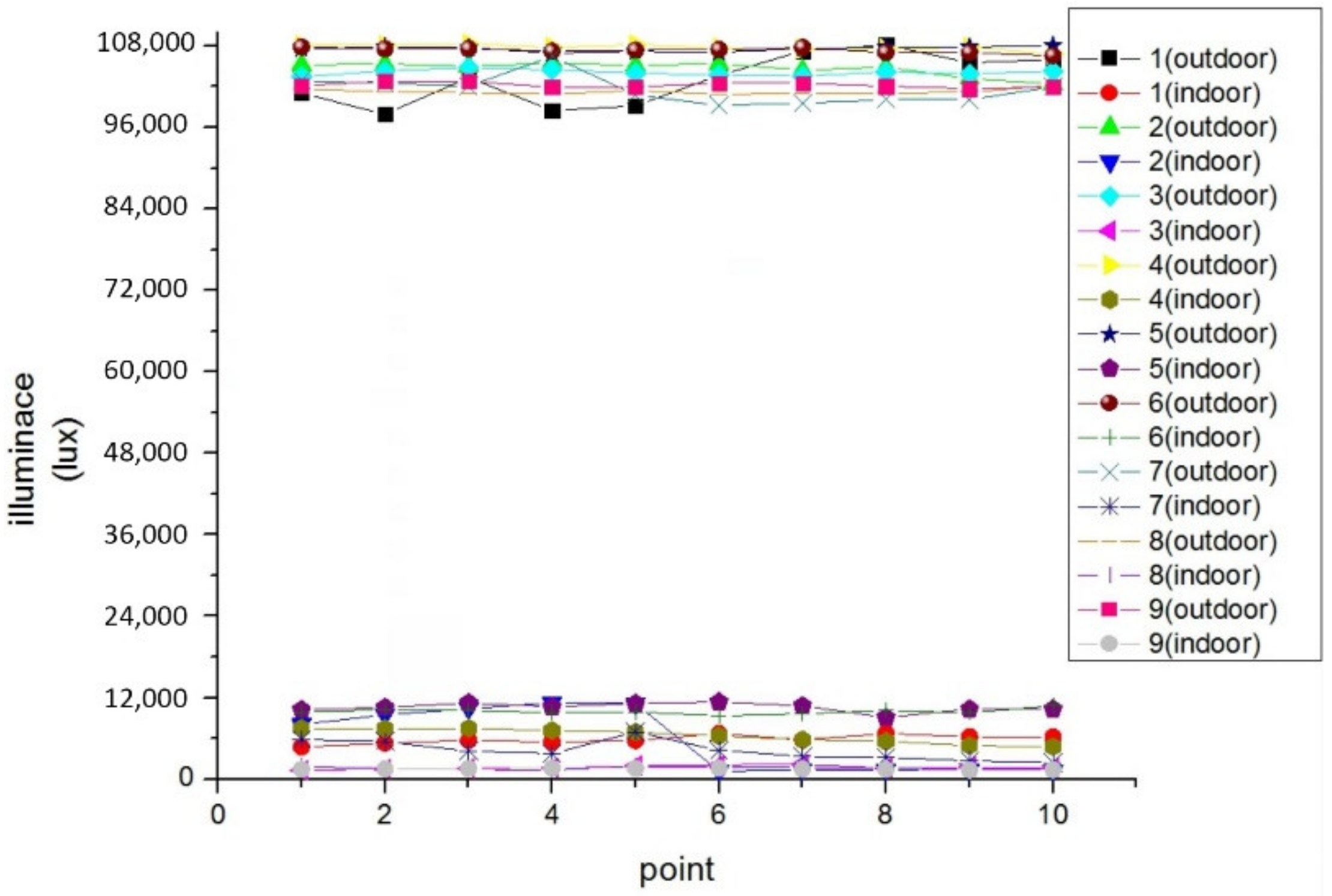
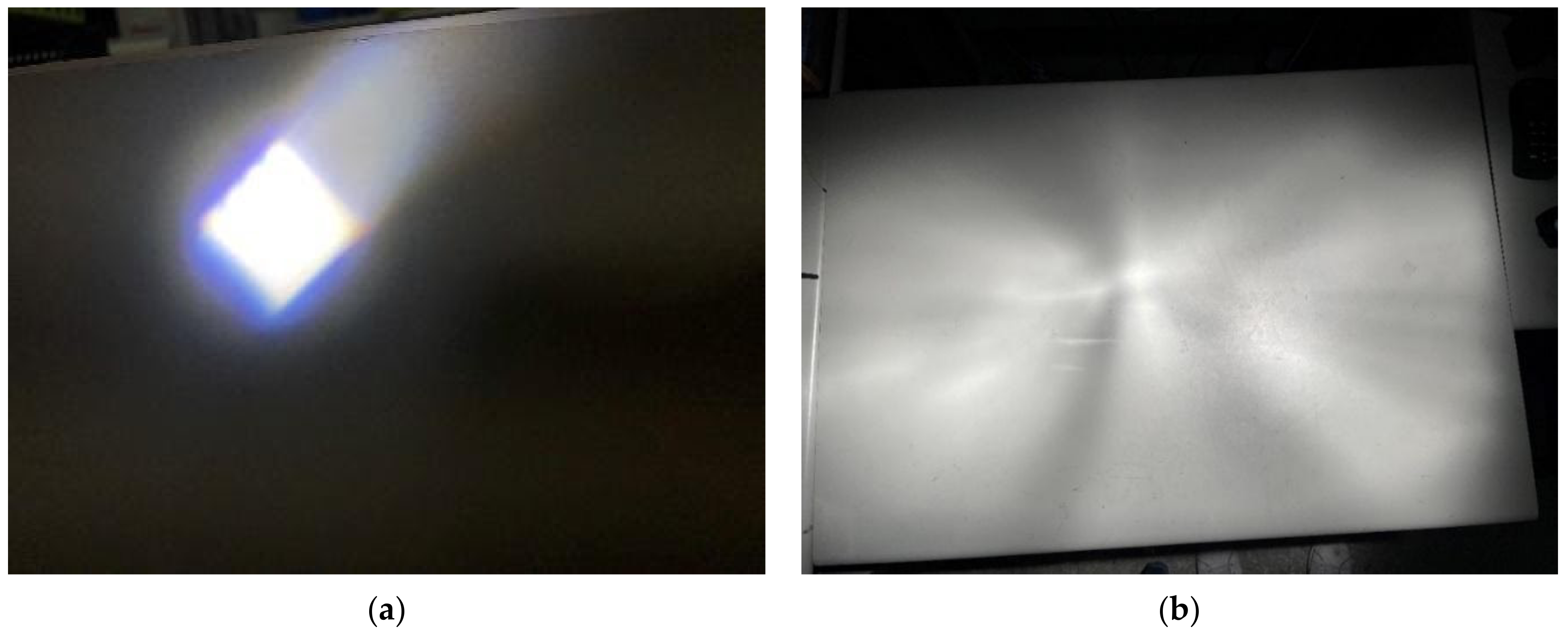
4.2. Measurement
5. Discussion and Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Nalley, S.; LaRose, A. Annual Energy Outlook 2020; US Energy Information Administration: Washington, DC, USA, 2019; p. 63.
- Gago, E.J.; Muneer, T.; Knez, M.; Köster, H. Natural light controls and guides in buildings. Energy saving for electrical lighting, reduction of cooling load. Renew. Sustain. Energy Rev. 2015, 41, 1–13. [Google Scholar] [CrossRef]
- Dunne, A. Some effects of the quality of light on health. J. Orthomol. Med. 2015, 7, 229–323. [Google Scholar]
- Gallaway, T.; Olsen, R.N.; Mitchell, D.M. The economics of global light pollution. Ecol. Econ. 2010, 69, 658–665. [Google Scholar] [CrossRef]
- Mead, M.N. Benefits of Sunlight: A Bright Spot for Human Health. Environ. Health Perspect. 2008, 116, A160–A167. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Al Horr, Y.; Arif, M.; Kaushik, A.; Mazroei, A.; Katafygiotou, M.; Elsarrag, E. Occupant productivity and office indoor environment quality: A review of the literature. Build. Environ. 2016, 105, 369–389. [Google Scholar] [CrossRef] [Green Version]
- Odeh, I.; Hussein, T. Activity Pattern of Urban Adult Students in an Eastern Mediterranean Society. Int. J. Environ. Res. Public Health 2017, 13, 10. [Google Scholar] [CrossRef] [Green Version]
- Vu, N.-H.; Shin, S. Cost-effective optical fiber daylighting system using modified compound parabolic concentrators. Sol. Energy 2016, 136, 145–152. [Google Scholar] [CrossRef]
- Beccali, M.; Bonomolo, M.; Brano, V.L.; Ciulla, G.; di Dio, V.; Massaro, F.; Favuzza, S. Energy saving and user satisfaction for a new advanced public lighting system. Energy Convers. Manag. Sep. 2019, 195, 943–957. [Google Scholar] [CrossRef]
- Sharp, F.; Lindsey, D.; Dols, J.; Coker, J. The use and environmental impact of daylighting. J. Clean. Prod. 2008, 85, 462–471. [Google Scholar] [CrossRef]
- Chang, C.-H.; Hsiso, H.-C.; Chang, C.-M.; Wang, C.-Y.; Lin, T.-H.; Chen, Y.-Y.; Lai, Y.-L.; Yen, C.-J.; Chen, K.-Y.; Whang, A.J.-W. Heliostat design for the daylighting system. Appl. Opt. 2014, 53, H165–H169. [Google Scholar] [CrossRef] [PubMed]
- Whang, A.J.; Chao, S.-M.; Chou, C.-H.; Lin, C.-M.; Chang, C.-M.; Jhan, K.-C.; Wang, C.-W. Innovative coupler design based on a tapered light pipe with lens. Chin. Opt. Lett. 2013, 11, 122201-122201. [Google Scholar] [CrossRef]
- Barbón, A.; Sánchez-Rodríguez, J.; Bayón, L.; Bayón-Cueli, C. Cost estimation relationships of a small scale linear Fresnel reflector. Renew. Energy 2018, 134, 1273–1284. [Google Scholar] [CrossRef]
- Pham, T.T.; Vu, N.H.; Shin, S. Daylighting System Based on Novel Design of Linear Fresnel lens. Buildings 2017, 7, 92. [Google Scholar] [CrossRef] [Green Version]
- Ullah, I.; Shin, S. Highly concentrated optical fiber-based daylighting systems for multi-floor office buildings. Energy Build. 2014, 72, 246–261. [Google Scholar] [CrossRef]
- Lv, Y.; Xia, L.; Li, M.; Wang, L.; Su, Y.; Yan, J. Techno-economic evaluation of an optical fiber based hybrid solar lighting system. Energy Convers. Manag. 2020, 225, 113399. [Google Scholar] [CrossRef]
- Tian, M.; Su, Y.; Zheng, H.; Pei, G.; Li, G.; Riffat, S. A review on the recent research progress in the compound parabolic concentrator (CPC) for solar energy applications. Renew. Sustain. Energy Rev. 2017, 82, 1272–1296. [Google Scholar] [CrossRef] [Green Version]
- Carli, R.; Dotoli, M. A Dynamic Programming Approach for the Decentralized Control of Energy Retrofit in Large-Scale Street Lighting Systems. IEEE Trans. Autom. Sci. Eng. 2020, 17, 1140–1157. [Google Scholar] [CrossRef]
- Kontadakis, A.; Tsangrassoulis, A.; Doulos, L.; Topalis, F. An active sunlight redirection system for daylight enhancement beyond the perimeter zone. Build. Environ. 2017, 113, 267–279. [Google Scholar] [CrossRef]
- Donald Prowler and Associates. Sun Control and Shading Devices. In Whole Building Design Guide; National Institute of Building Sciences: Washington, DC, USA, 2016. [Google Scholar]
- Babu, S.; Zhou, J.; Wan, M.P.; Lamano, A.S.; Sarvaiya, J.N.; Zhang, Z.; Kumar, D.K.; Gao, C.-P.; Valliappan, S.; Goh, A.; et al. Investigation of an integrated automated blinds and dimmable lighting system for tropical climate in a rotatable testbed facility. Energy Build. 2018, 183, 356–376. [Google Scholar] [CrossRef]
- Wagiman, K.R.; Abdullah, M.N.; Hassan, M.Y.; Radzi, N.H.M.; Abu Bakar, A.H.; Kwang, T.C. Lighting system control techniques in commercial buildings: Current trends and future directions. J. Build. Eng. 2020, 31, 101342. [Google Scholar] [CrossRef]
- Whang, A.J.-W.; Chen, Y.-Y.; Yang, S.-H.; Pan, P.H.; Chou, K.H.; Lee, Y.C.; Lee, Z.Y.; Chen, C.-A.; Chen, C.-N. Natural light illumination system. Appl. Opt. 2010, 49, 6789–6801. [Google Scholar] [CrossRef] [PubMed]
- Reda, I.; Andreas, A. Solar Position Algorithm for Solar Radiation Applications; National Renewable Energy Laboratory: Golden, CO, USA, 2008.
- Vincenty, T. Geodetic Inverse Solution between Antipodal Points. In DMAAC Geodetic Survey; Ohio State University: Columbus, OH, USA,, 1975. [Google Scholar] [CrossRef]
- Lin, Y.Z.; Fu, Y.T.; Chan, K.C.; Lin, C.M.; Chen, H.C.; Whang, A.J.W. Heliostat for Natural Light Illumination System. In Proceedings of the 2nd International Conference on Electrical Engineering and Computer Science, Taipei City, Taiwan, 28–29 October 2016. [Google Scholar]
- Rea, M.; Figueiro, M. Light as a circadian stimulus for architectural lighting. Light. Res. Technol. 2016, 50, 497–510. [Google Scholar] [CrossRef]



























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Point | Average Outdoor Illuminance (10 Times; in Lux) | Average Indoor Illuminance (10 Times; in Lux) |
|---|---|---|
| 1 | 103,067.3 | 5845.2 |
| 2 | 104,665.9 | 5663.8 |
| 3 | 104,079.1 | 1704.1 |
| 4 | 107,786.0 | 6391.3 |
| 5 | 97,898.0 | 10,555.1 |
| 6 | 107,345.6 | 9940.0 |
| 7 | 92,571.7 | 4197.6 |
| 8 | 101,275.5 | 1611.5 |
| 9 | 102,244.5 | 1479.2 |
| Type | Uniformity |
|---|---|
| Simulation (before regression) | 0.41 |
| Simulation (after regression) | 0.62 |
| Measurement | 0.28 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Whang, A.J.-W.; Chen, Y.-Y.; Leu, M.-Y.; Tseng, W.-C.; Lin, Y.-Z.; Chang, H.-W.; Tsai, C.-H.; Liang, Y.-C.; Zhang, X.; Lin, C.-T.; et al. Development and Testing of a Modular Sunlight Transport System Employing Free-Form Mirrors. Energies 2022, 15, 406. https://doi.org/10.3390/en15020406
Whang AJ-W, Chen Y-Y, Leu M-Y, Tseng W-C, Lin Y-Z, Chang H-W, Tsai C-H, Liang Y-C, Zhang X, Lin C-T, et al. Development and Testing of a Modular Sunlight Transport System Employing Free-Form Mirrors. Energies. 2022; 15(2):406. https://doi.org/10.3390/en15020406
Chicago/Turabian StyleWhang, Allen Jong-Woei, Yi-Yung Chen, Min-Yih Leu, Wei-Chieh Tseng, Yu-Zheng Lin, Hao-Wen Chang, Chih-Hsien Tsai, Yu-Cheng Liang, Xin Zhang, Cheng-Tse Lin, and et al. 2022. "Development and Testing of a Modular Sunlight Transport System Employing Free-Form Mirrors" Energies 15, no. 2: 406. https://doi.org/10.3390/en15020406