
Virtual Synchronous Generator, a Comprehensive Overview

Abstract
:1. Introduction
2. The Basic Operation Principle
2.1. The Voltage-Controlled VSG
2.1.1. Basic VC-VSC [16]
2.1.2. Synchronverter
2.2. The Current-Controlled VSG
2.2.1. Basic CC-VSG Control Strategy [10]
2.2.2. VISMA Control Strategy [19]
2.3. Active and Reactive Power Coupling Analysis of VSG
2.3.1. Power Coupling Analysis of VC-VSG
2.3.2. Power Coupling Analysis of CC-VSG
2.4. Influence of VSG on Frequency Stability Power System
2.5. The Comparison between CC-VSG and VC-VSG
3. Hardware Configuration of VSG
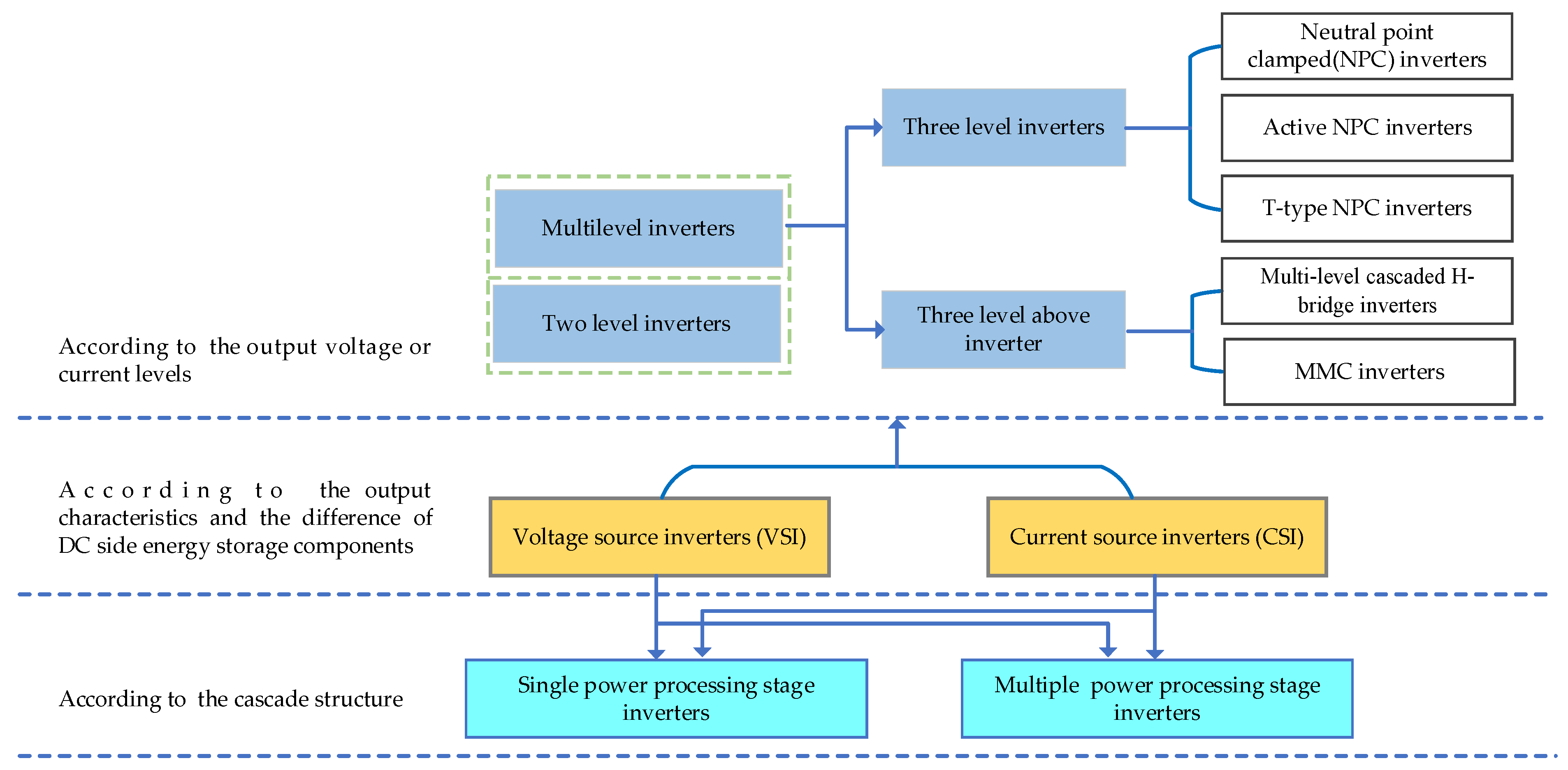
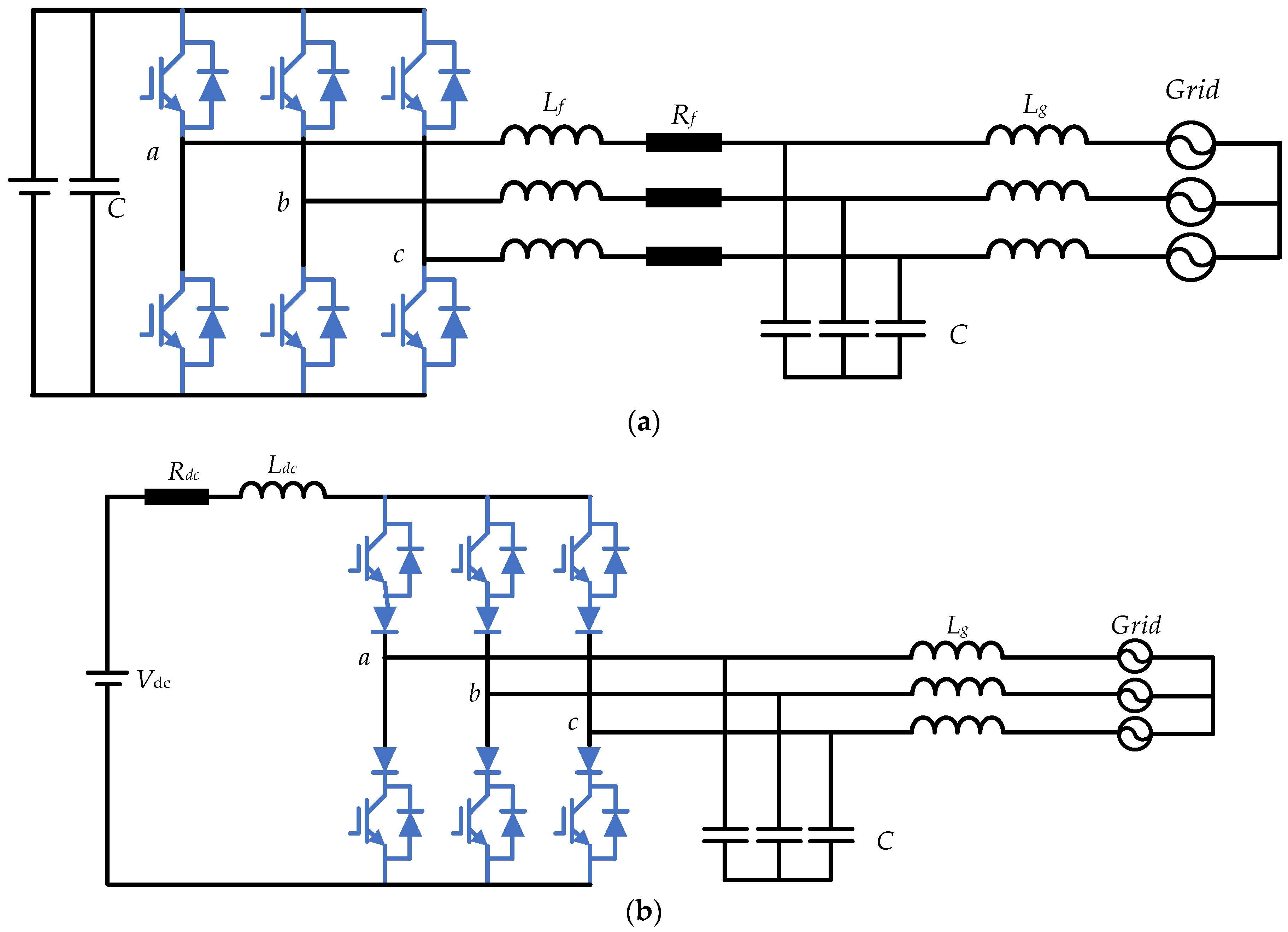
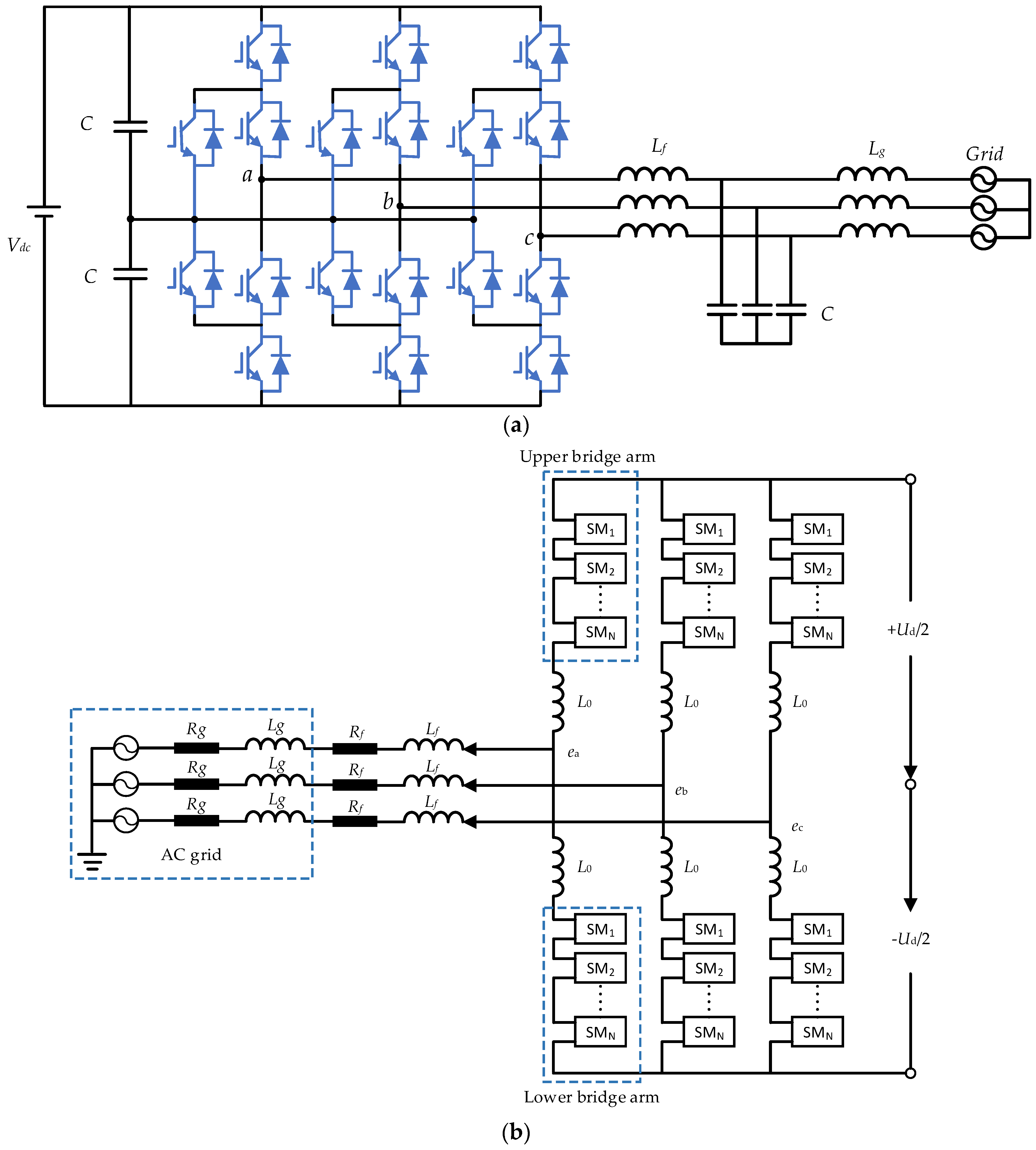
3.1. Topology of VSG
3.2. Power Conversion Stages of VSG
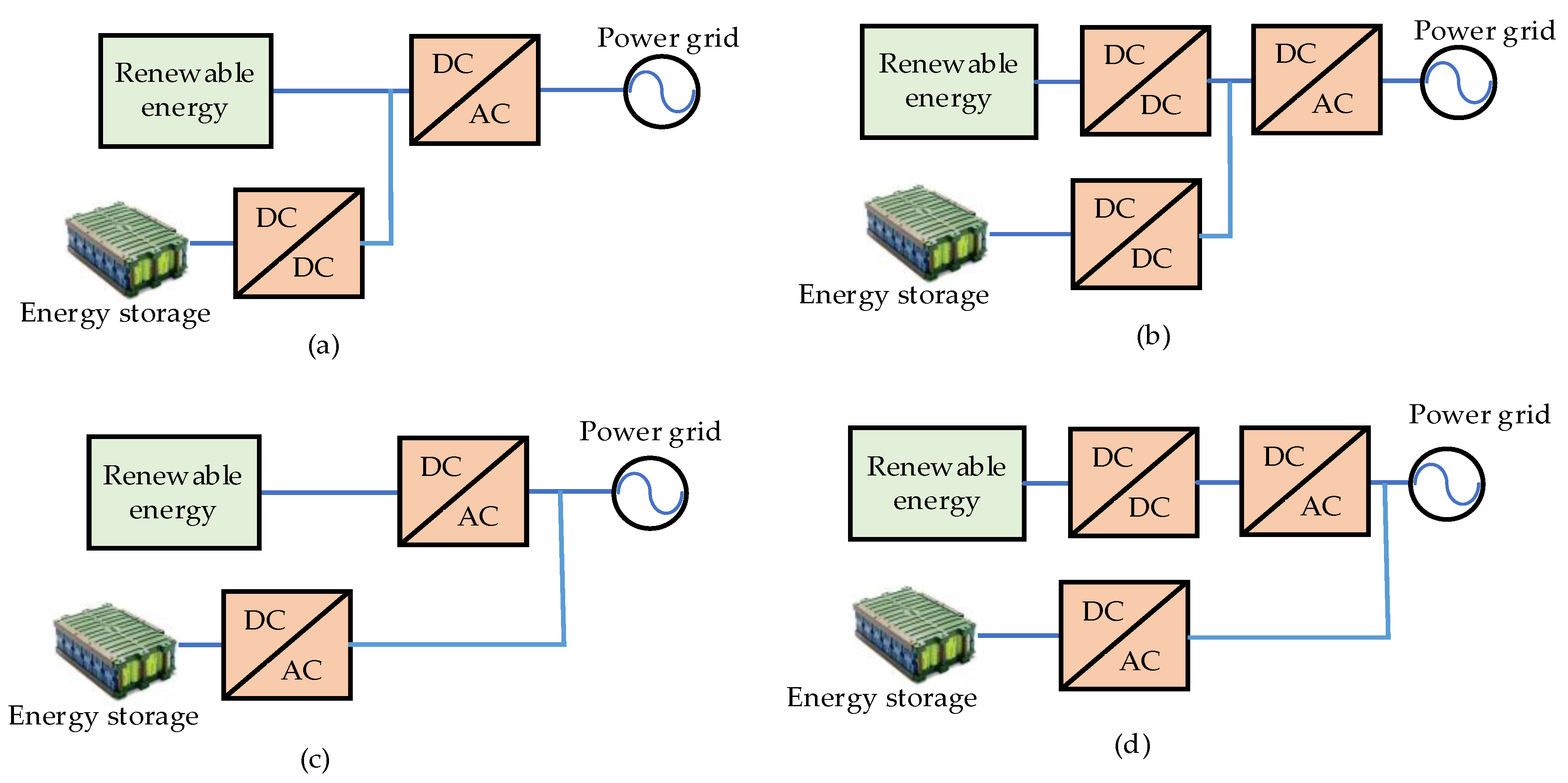
3.3. Integration of RES and ESD in a VSG
3.3.1. Common DC Bus Single-Stage VSG
3.3.2. Common DC Bus Dual-Stage VSG
3.3.3. Common AC Bus VSG
4. Software Control Method of VSG
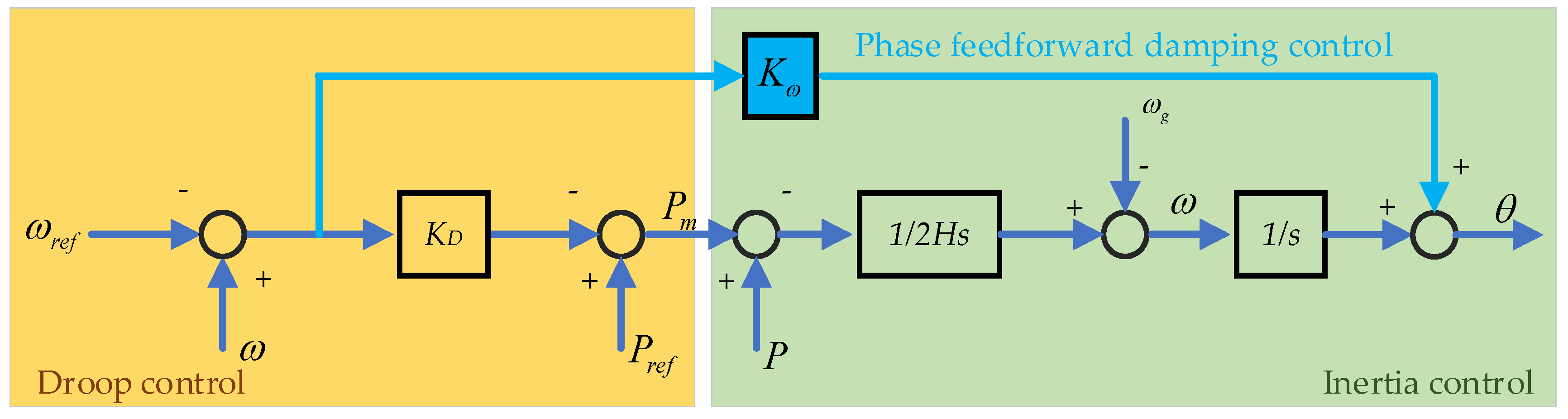
4.1. Frequency Stability Control of VSG
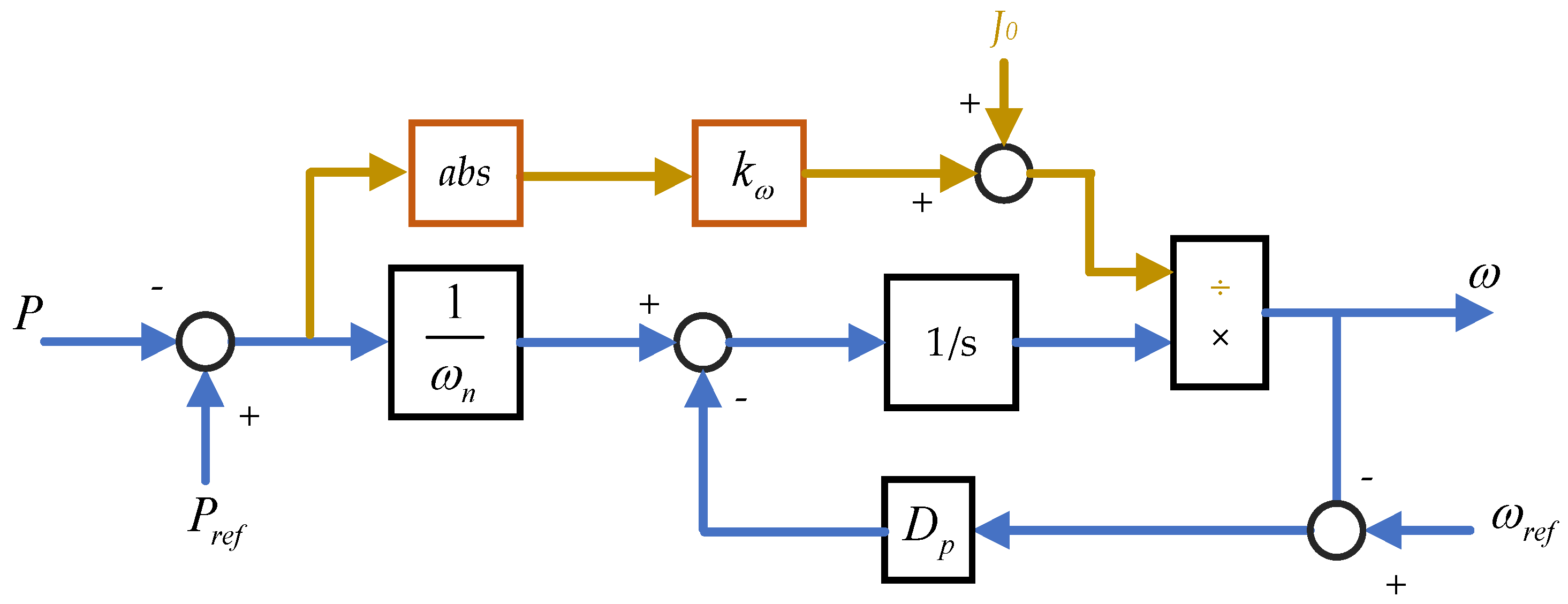
4.1.1. Adaptive Virtual Inertial Control
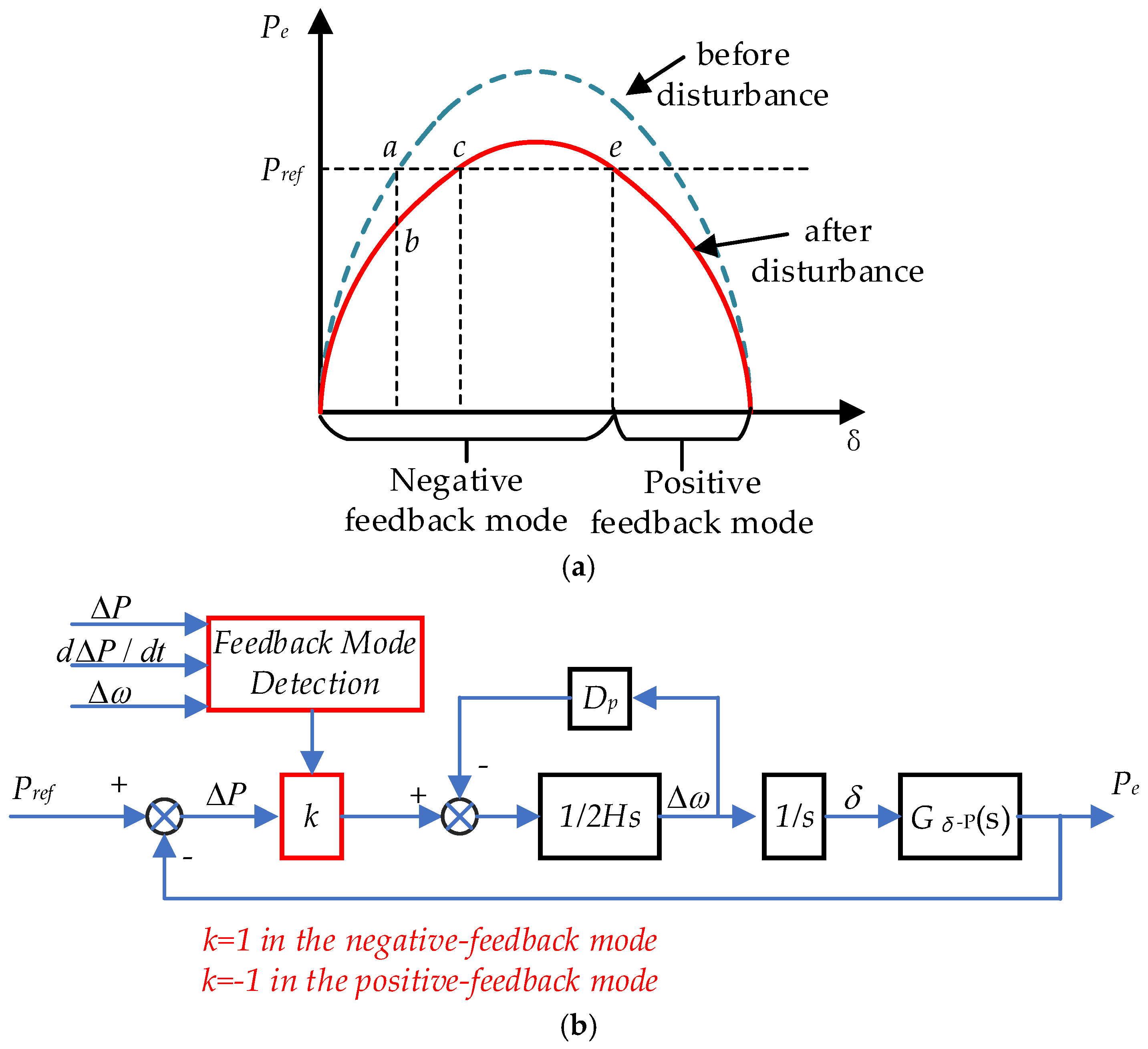
4.1.2. Adaptive Power Damping Control
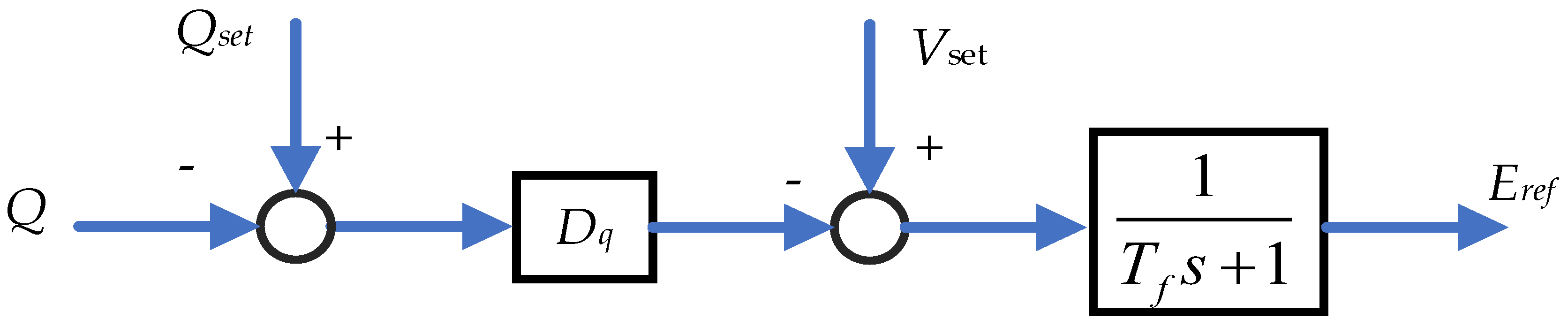
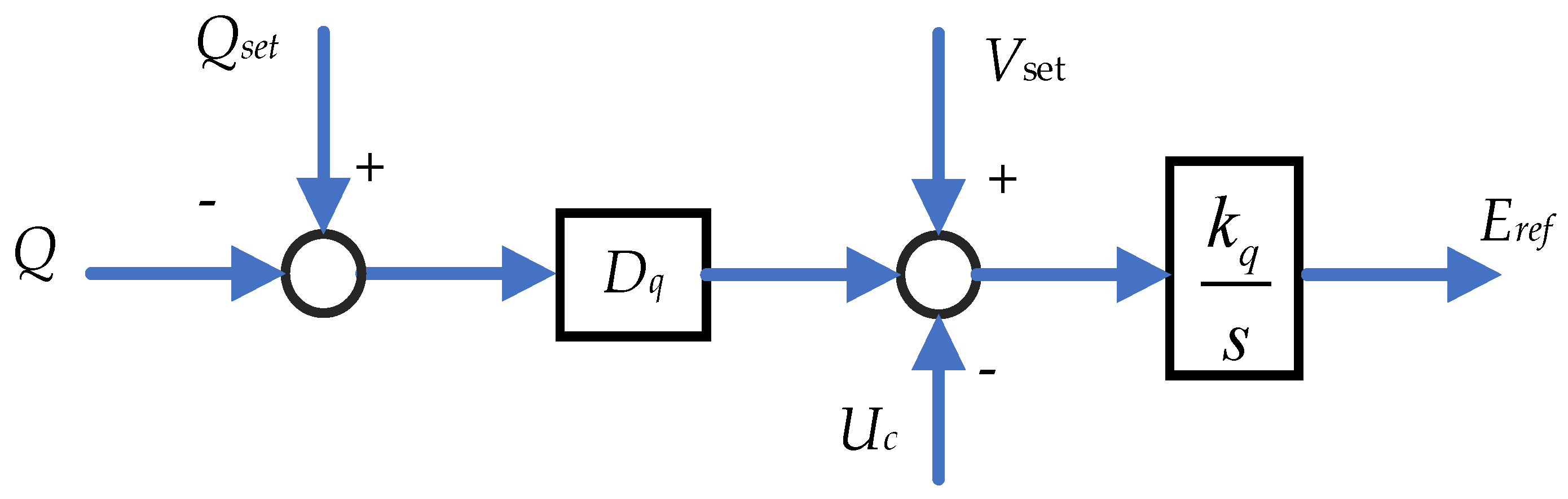
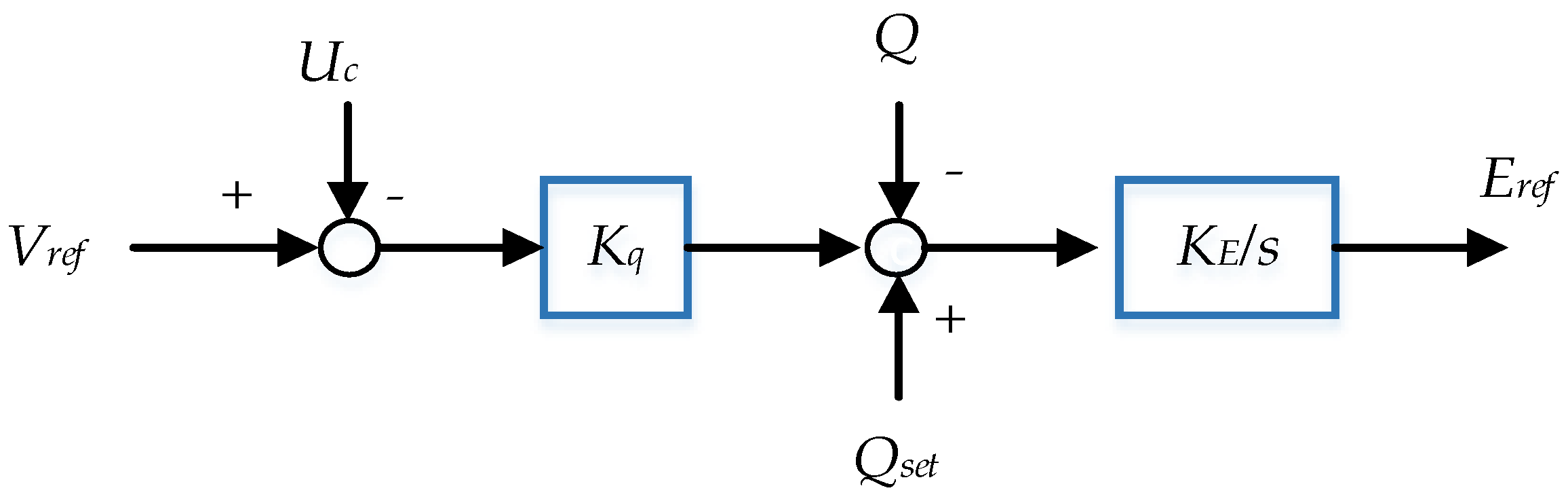
4.2. Reactive Power Control of VSG
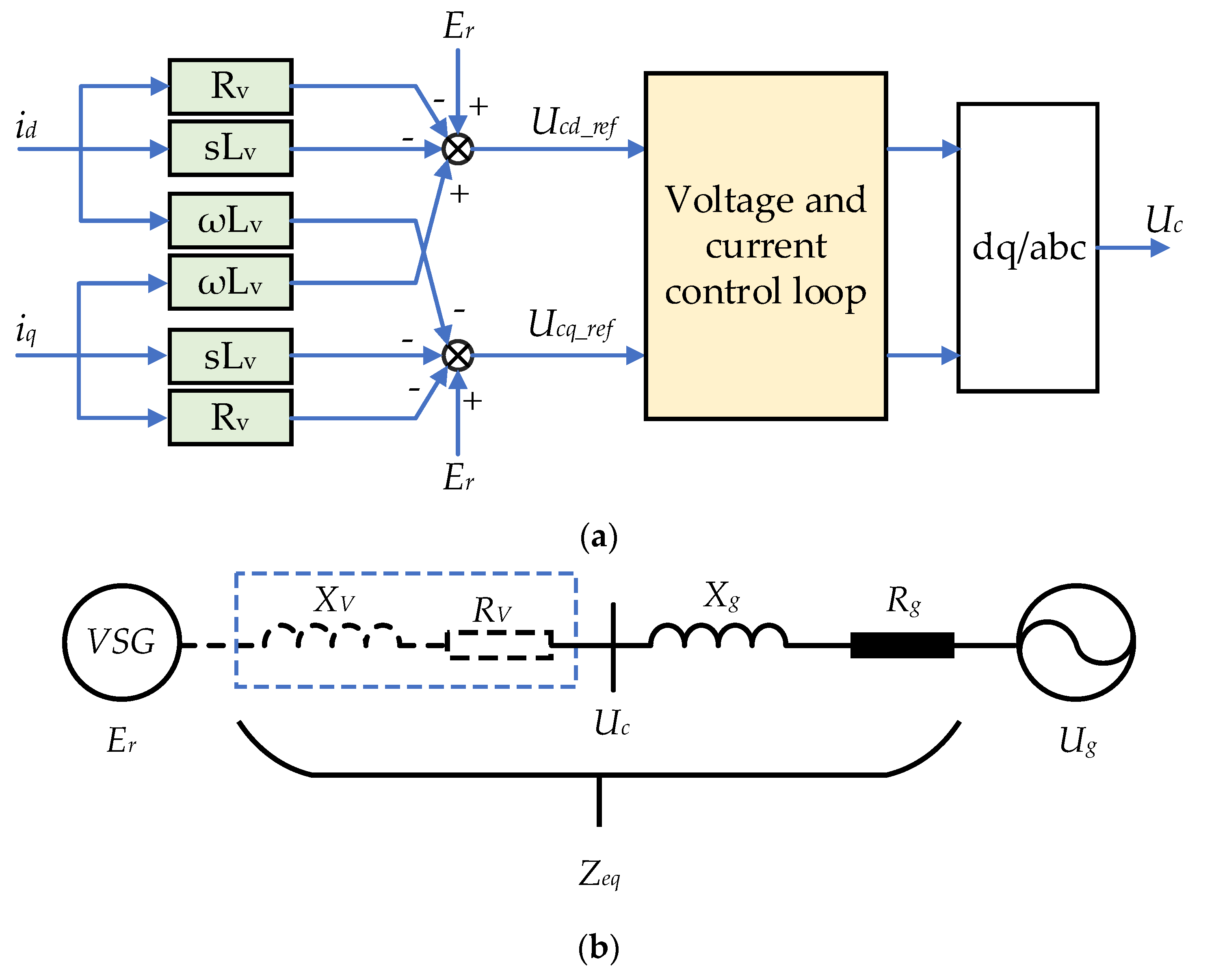
4.3. Power Decoupling Control of VSG
5. Energy Supporting Ways
5.1. Superconducting Magnetic Energy Storage
5.2. Flywheel Energy Storage
5.3. Supercapacitor Energy Storage
5.4. Battery Energy Storage
5.5. Hybrid Energy Storage
6. Applications of VSG in Power Systems
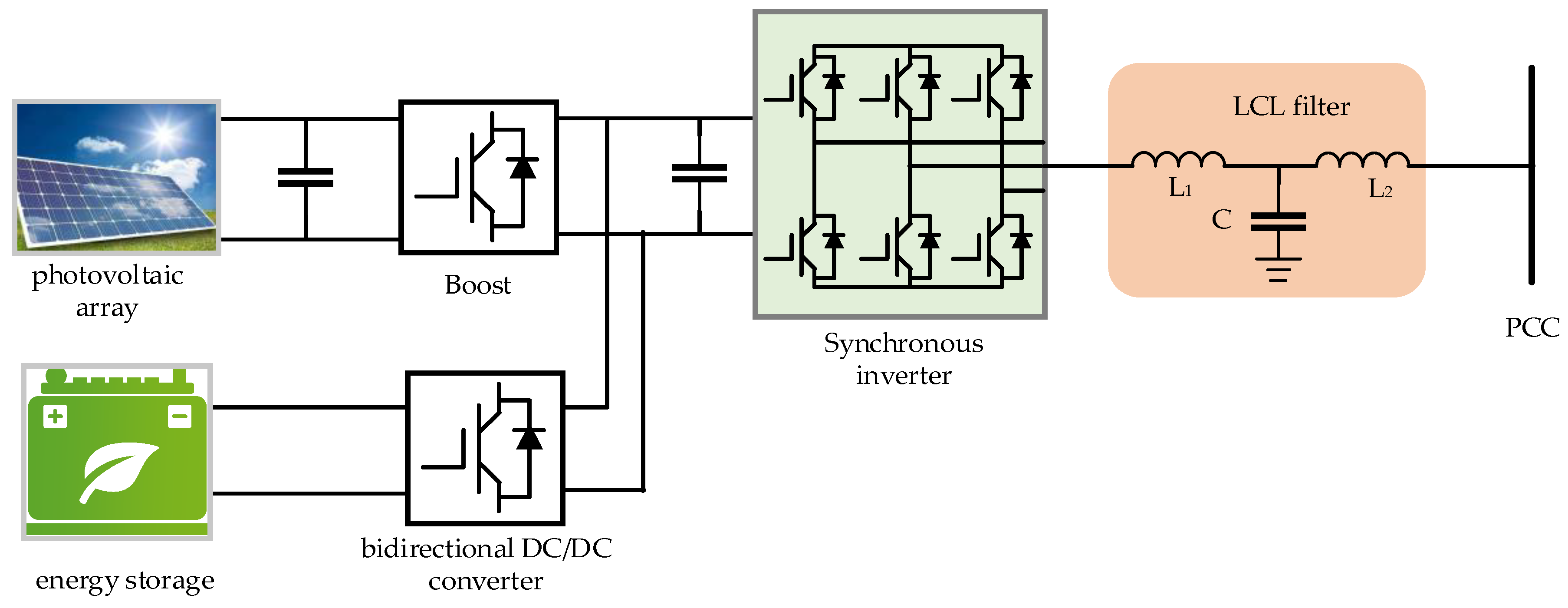
6.1. Application of VSG in Photovoltaic Power Generation
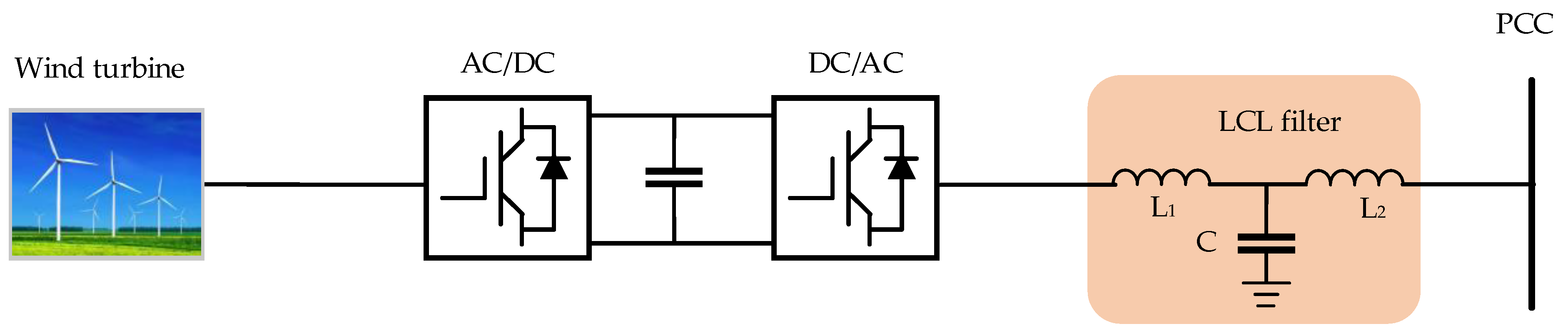
6.2. Application of VSG in Wind Power Generation
6.3. Application of VSG in Energy Storage System
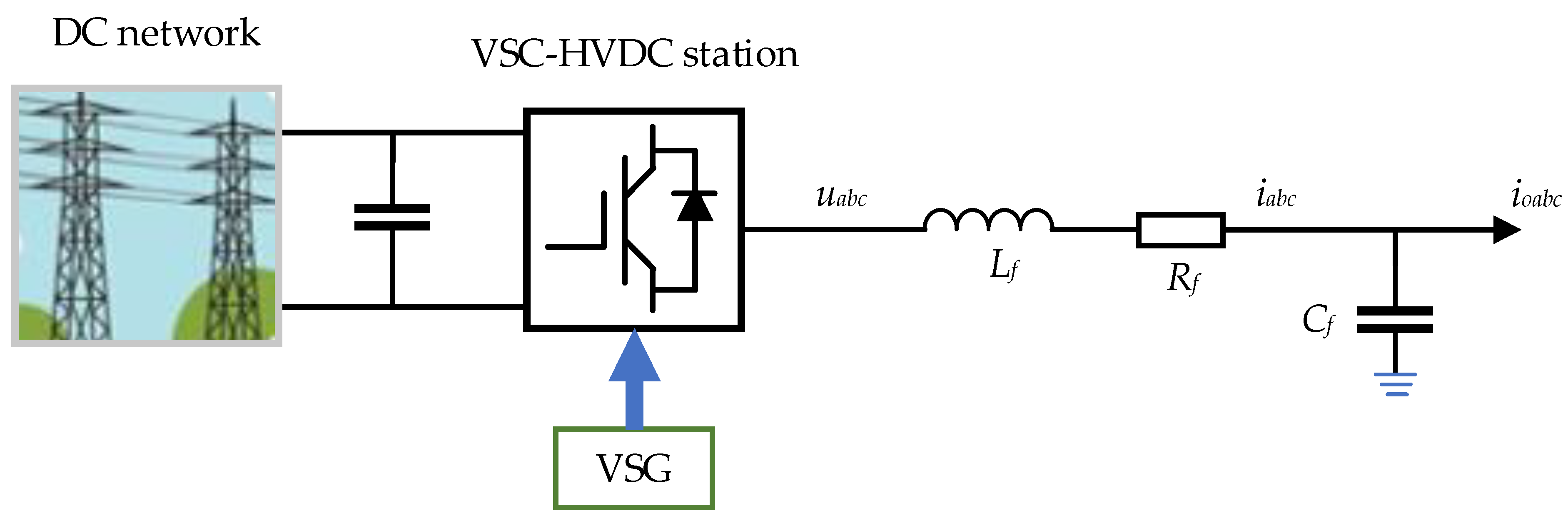
6.4. Application of VSG in VSC-HVDC
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Haritha, M.; Divya, S. Review on Virtual Synchronous Generator (VSG) for Enhancing Performance of Microgrid. In Proceedings of the 2018 International Conference on Power, Signals, Control and Computation (EPSCICON), Thrissur, India, 6–10 January 2018. [Google Scholar]
- Vasudevan, K.R.; Ramachandaramurthy, V.K.; Babu, T.S. Synchronverter: A Comprehensive Review of Modifications, Stability Assessment, Applications and Future Perspectives. IEEE Access 2020, 8, 131565–131585. [Google Scholar] [CrossRef]
- Chen, M.; Zhou, D.; Blaabjerg, F. Modelling, Implementation, and Assessment of Virtual Synchronous Generator in Power Systems. J. Mod. Power Syst. Clean Energy 2019, 8, 399–411. [Google Scholar] [CrossRef]
- Zhong, Q.C. Virtual Synchronous Machines: A unified interface for grid integration. IEEE Power Electron. Mag. 2016, 3, 18–27. [Google Scholar] [CrossRef]
- Liu, J.; Yang, D.J.; Yao, W. PV-based virtual synchronous generator with variable inertia to enhance power system transient stability utilizing the energy storage system. Prot. Control Mod. Power Syst. 2017, 2, 39. [Google Scholar] [CrossRef]
- Zhong, Q.C.; Weiss, G. Synchronverters: Inverters That Mimic Synchronous Generators. IEEE Trans. Ind. Electron. 2010, 58, 1259–1267. [Google Scholar] [CrossRef]
- Li, J.; Wen, B.; Wang, H. Adaptive Virtual Inertia Control Strategy of VSG for Micro-Grid Based on Improved Bang-Bang Control Strategy. IEEE Access 2019, 7, 39509–39514. [Google Scholar] [CrossRef]
- Adapa, M.H.; Baker, L.; Bohmann, K.C. Proposed terms and definitions for flexible AC transmission system (FACTS). IEEE Trans. Power Deliv. 1997, 12, 1848–1853. [Google Scholar]
- Kechroud, A.; Myrzik, J.M.A.; Kling, W. Taking the experience from Flexible AC Transmission Systems to flexible AC distribution systems. In Proceedings of the 42nd International Universities Power Engineering Conference, Brighton, UK, 4–6 September 2007. [Google Scholar]
- Loix, T. Participation of Inverter-Connected Distributed Energy Resources in Grid Voltage Control; Katholieke Universiteit: Leuven, Belgium, 2011. [Google Scholar]
- Beck, H.-P.; Hesse, R. Virtual Synchronous Machine. In Proceedings of the 9th International Conference on Electrical Power Quality and Utilisation, Barcelona, Spain, 9–11 October 2007. [Google Scholar]
- Zhong, Q.C. Four-quadrant operation of AC machines powered by inverters that mimic synchronous generators. In Proceedings of the 5th IET International Conference on Power Electronics, Machines and Drives (PEMD 2010), Brighton, UK, 19–21 April 2010. [Google Scholar]
- Alatrash, H.; Mensah, A.; Mark, E.; Amarin, R.; Enslin, J. Generator Emulation Controls for Photovoltaic Inverters. In Proceedings of the 8th International Conference on Power Electronics—ECCE Asia, Jeju, Korea, 30 May–3 June 2011. [Google Scholar]
- Lin, Q.; Kanekiyo, Y.; Arai, J.; Yamashita, D. Field Demonstration of Parallel Operation of Virtual Synchronous Controlled Grid-Forming Inverters and a Diesel Synchronous Generator in a Microgrid. IEEE Access 2022, 10, 39095–39106. [Google Scholar] [CrossRef]
- Recommended Practice or Use and Functions of Virtual Synchronous Machines. Available online: http://standards.ieee.org/ieee/2988/10581 (accessed on 25 March 2021).
- Gao, F.; Iravani, M.R. A Control Strategy for a Distributed Generation Unit in Grid-Connected and Autonomous Modes of Operation. IEEE Trans. Power Deliv. 2008, 23, 850–859. [Google Scholar]
- Zhang, X.; Zhu, D.B.; Xu, H.Z. Review of Virtual Synchronous Generator Technology in Distributed Generation. J. Power Supply 2012, 3, 1–5. [Google Scholar]
- Fang, J.Y.; Zhang, R.Q.; Li, H.C.; Tang, Y. Frequency Derivative-Based Inertia Enhancement by Grid-Connected Power Converters with a Frequency-Locked-Loop. IEEE Trans. Smart Grid 2019, 5, 4918–4927. [Google Scholar] [CrossRef]
- Chen, Y.; Hesse, R.; Turschner, D.; Beck, H.P. Improving the grid power quality using virtual synchronous machines. In Proceedings of the 2011 International Conference on Power Engineering, Energy and Electrical Drives, Malaga, Spain, 11–13 May 2011. [Google Scholar]
- Li, Z.J.; Jia, X.Y.; Wang, L.J. Improved Virtual Synchronous Generator Based on Enhanced Inertiaand Damping Characteristics. Acta Energy Sol. Sin. 2021, 7, 79–84. [Google Scholar]
- Zhang, Y.; Yan, X. Coupling Analysis and Decoupling Control of Microgrid Power. Power Syst. Technol. 2016, 40, 813–818. [Google Scholar]
- Knap, V.; Sanjay, K.C.; Stroe, D.I. Sizing of an Energy Storage System for Grid Inertial Response and Primary Frequency Reserve. IEEE Trans. Power Syst. 2016, 31, 3447–3456. [Google Scholar] [CrossRef]
- Thongchart, K.; Fathin, R.; Yasunori, M. Virtual Inertia Control Application to Enhance Frequency Stability of Interconnected Power Systems with High Renewable Energy Penetration. Energies 2018, 11, 981. [Google Scholar]
- Lerch, K.S.; Kerdphol, T.; Mitani, Y.; Turschner, D. Frequency Stability Assessment on Virtual Inertia Control Strategy in Connected and Islanded Multi-Area Power Systems. In Proceedings of the 2020 IEEE International Conference on Environment and Electrical Engineering and 2020 IEEE Industrial and Commercial Power Systems Europe (EEEIC/I & CPS Europe), Madrid, Spain, 9–12 June 2020. [Google Scholar]
- Suul, J.A.; D’Arco, S.; Guidi, G. Virtual synchronous machine-based control of a single-phase bi-directional battery charger for providing vehicle-to-grid services. IEEE Trans. Ind. Appl. 2016, 52, 3234–3244. [Google Scholar] [CrossRef] [Green Version]
- Liu, J.; Miura, Y.; Bevrani, H.; Ise, T. Enhanced Virtual Synchronous Generator Control for Parallel Inverters in Microgrids. IEEE Trans. Smart Grid 2017, 8, 2268–2277. [Google Scholar] [CrossRef]
- Wu, W.H.; Zhou, L.M.; Chen, Y.D. Sequence-Impedance-Based Stability Comparison between VSGs and Traditional Grid-Connected Inverters. IEEE Trans. Power Electron. 2019, 1, 46–52. [Google Scholar] [CrossRef]
- Aghazadeh, A.; Khodabakhshi-Javinani, N.; Nafisi, H. Adapted Near-State PWM for Dual 2L Inverter for Reducing Common-Mode Voltage and Switching Losses. IET Power Electron. 2019, 12, 676–685. [Google Scholar] [CrossRef]
- Grogan, S.A.S.; Holmes, D.G. High-Performance Voltage Regulation of Current Source Inverters. IEEE Trans. Power Electron. 2011, 26, 2439–2448. [Google Scholar] [CrossRef]
- Su, G.J.; Ning, P.Q. Loss Modeling and Comparison on VSI and RB-IGBT Based CSI in Traction Drive Applications. In Proceedings of the 2013 IEEE Transportation Electrification Conference and Expo (ITEC), Detroit, MI, USA, 16–19 June 2013. [Google Scholar]
- Torres, M.; Baier, C.; Juan, M. Non-Linear Control of a Grid-Connected Multi-Cell Photovoltaic Inverter that Operates under Variable Temperature and Irradiance. In Proceedings of the 2015 IEEE International Conference on Industrial Technology (ICIT), Seville, Spain, 17–19 March 2015. [Google Scholar]
- Dashtaki, M.A.; Nafisi, H.; Pouresmaeil, E.; Khorsandi, A. Virtual Inertia Implementation in Dual Two-Level Voltage Source Inverters. In Proceedings of the 2020 11th Power Electronics, Drive Systems, and Technologies Conference (PEDSTC), Tehran, Iran, 4–6 February 2020. [Google Scholar]
- Dupczak, B.S.; Perin, A.J.; Heldwein, M.L. Space vector modulation strategy applied to interphase transformers-based five-level current source inverters. IEEE Trans. Power Electron. 2012, 27, 2740–2751. [Google Scholar] [CrossRef]
- Pouresmaeil, M.; Sepehr, A.; Sangrody, R.; Taheri, S. Control of Multilevel Converters for High Penetration of Renewable Energies. In Proceedings of the 2021 IEEE 12th International Symposium on Power Electronics for Distributed Generation Systems (PEDG), Chicago, IL, USA, 28 June–1 July 2021. [Google Scholar]
- Yu, Y.; Gao, H.Y.; Guo, Q.B. Cascaded 3-Phase-Bridge Converter Based on Virtual Synchronous Generator Control. In Proceedings of the IECON 2021—47th Annual Conference of the IEEE Industrial Electronics Society, Toronto, ON, Canada, 13–16 October 2021. [Google Scholar]
- Chen, J.K.; Zeng, Q.; Li, G.Q.; Xin, Y.C. Deviation-Free Frequency Control of MMC-MTDC Converter Based on Improved VSG. In Proceedings of the 2019 IEEE 10th International Symposium on Power Electronics for Distributed Generation Systems (PEDG), Xiamen, China, 11–14 November 2019. [Google Scholar]
- Chen, J.K.; Zeng, Q.; Li, G.Q. A Coordination Control Method for Multi-terminal AC/DC Hybrid System Based on MMC Transmission Technology. In Proceedings of the 2019 IEEE 10th International Symposium on Power Electronics for Distributed Generation Systems (PEDG), Xi’an, China, 3–6 June 2019. [Google Scholar]
- Chen, D.; Xu, Y.Z.; Huang, A.Q. Integration of DC Microgrids as Virtual Synchronous Machines into the AC Grid. IEEE Trans. Ind. Electron. 2017, 64, 7455–7466. [Google Scholar] [CrossRef]
- Wang, Z.X.; Hao, Y.; Fang, Z. A Hardware Structure of Virtual Synchronous Generator in Photovoltaic Microgrid and Its Dynamic Performance Analysis. Proc. CSEE 2017, 37, 444–453. [Google Scholar]
- Shi, H.T.; Zhuo, F.; Yi, H.; Wang, F. A Novel Real-Time Voltage and Frequency Compensation Strategy for Photovoltaic-Based Microgrid. IEEE Trans. Ind. Electron. 2015, 62, 3545–3556. [Google Scholar] [CrossRef]
- Othman, M.H.; Mokhlis, H.; Mubin, M.; Talpur, S. Progress in control and coordination of energy storage system-based VSG: A review. IET Renew. Power Gener. 2020, 14, 177–187. [Google Scholar] [CrossRef]
- Shintai, T.; Miura, Y.; Ise, T. Oscillation damping of a distributed generator using a virtual synchronous generator. IEEE Trans. Power Deliv. 2014, 29, 668–676. [Google Scholar] [CrossRef]
- Guan, M.Y.; Pan, W.L.; Zhang, J.; Hao, Q.R. Synchronous Generator Emulation Control Strategy for Voltage Source Converter (VSC) Stations. IEEE Trans. Power Syst. 2015, 30, 3093–3101. [Google Scholar] [CrossRef]
- Li, M.X.; Wang, Y.; Xu, N.Y.; Wang, W.T. A Consistent Dynamic Response Control Strategy for Virtual Synchronous Generator. In Proceedings of the 2017 IEEE 3rd International Future Energy Electronics Conference and ECCE Asia (IFEEC 2017—ECCE Asia), Kaohsiung, Taiwan, 3–7 June 2017. [Google Scholar]
- Alipoor, J.; Miura, Y.; Ise, T. Power System Stabilization Using Virtual Synchronous Generator with Alternating Moment of Inertia. IEEE J. Emerg. Sel. Top. Power Electron. 2015, 3, 451–458. [Google Scholar] [CrossRef]
- Li, D.D.; Zhu, Q.W.; Lin, S.F. A self-adaptive inertia and damping combination control of VSG to support frequency stability. IEEE Trans. Energy Convers. 2017, 32, 397–398. [Google Scholar] [CrossRef]
- Meng, J.H.; Wang, Y.; Fu, C.; Wang, H. Adaptive Virtual Inertia Control of Distributed Generator for Dynamic Frequency Support in Microgrid. In Proceedings of the 2016 IEEE Energy Conversion Congress and Exposition (ECCE), Milwaukee, WI, USA, 18–22 September 2016. [Google Scholar]
- Song, Q.; Zhang, H.; Sun, K.; Wei, Y. Improved Adaptive Control of Inertia for Virtual Synchronous Generators in Islanding Micro-grid with Multiple Distributed Generation Units. Proc. CSEE 2017, 20, 413–423. [Google Scholar]
- Wu, H.; Wang, X.F. A Mode-Adaptive Power-Angle Control Method for Transient Stability Enhancement of Virtual Synchronous Generators. IEEE J. Emerg. Sel. Top. Power Electron. 2020, 8, 1034–1049. [Google Scholar] [CrossRef]
- Sun, L.Y.; Wang, P.C.; Han, J.F.; Wang, Y.Q. Adaptive Inertia Control of Virtual Synchronous Generator Based on Power Feedback. In Proceedings of the 2021 IEEE 4th International Electrical and Energy Conference (CIEEC), Wuhan, China, 28–30 May 2021. [Google Scholar]
- Quan, X.J.; Yu, R.Y.; Zhao, X.; Lei, Y. Photovoltaic Synchronous Generator (PVSG): Architecture and Control Strategy for a Grid-Forming PV Energy System. IEEE J. Emerg. Sel. Top. Power Electron. 2020, 8, 936–948. [Google Scholar] [CrossRef]
- Jiang, K.; Su, H.S.; Lin, H.J.; He, K.Z. A Practical Secondary Frequency Control Strategy for Virtual Synchronous Generator. IEEE Trans. Smart Grid 2020, 11, 2734–2736. [Google Scholar] [CrossRef]
- Li, M.X.; Yu, P.; Hu, W.H.; Wang, Y. Phase Feedforward Damping Control Method for Virtual Synchronous Generators. IEEE Trans. Power Electron. 2022, 37, 9790–9806. [Google Scholar] [CrossRef]
- Tiwari, A.K.; Seethalekshmi, K. Adaptive Virtual Synchronous Generator Control for Grid Forming Inverters in Islanded AC Microgrid—A Real Time Simulation. In Proceedings of the 2021 International Conference on Control, Automation, Power and Signal Processing (CAPS), Jabalpur, India, 10–12 December 2021. [Google Scholar]
- D’Arcoa, S.; Suul, J.A.; Fosso, B.O. Small-signal modeling and parametric sensitivity of a virtual synchronous machine in islanded operation. Electr. Power Energy Syst. 2015, 3, 4–13. [Google Scholar] [CrossRef]
- Chen, M.; Zhou, D.; Blaabjerg, F. Voltage Control Impact on Performance of Virtual Synchronous Generator. In Proceedings of the 2021 IEEE 12th Energy Conversion Congress & Exposition—Asia (ECCE—Asia), Singapore, 24–27 May 2021. [Google Scholar]
- Li, Y.W.; Kao, C.N. An accurate power control strategy for Power Electronics-Interfaced distributed generation units operating in a low voltage multi-bus microgrid. IEEE Trans. Power Electron. 2009, 24, 2977–2988. [Google Scholar]
- Mo, O.; D’Arco, S.; Suul, J.A. Evaluation of virtual synchronous machines with dynamic or quasi-stationary machine models. IEEE Trans. Ind. Electron. 2017, 64, 5952–5962. [Google Scholar] [CrossRef]
- Wu, H.; Ruan, X.B.; Yang, D.S.; Chen, X.R. Small-Signal Modeling and Parameters Design for Virtual Synchronous Generators. IEEE Trans. Ind. Electron. 2016, 63, 4292–4303. [Google Scholar] [CrossRef]
- Zhang, Q.Q.; Wai, R.J. Robust power sharing and voltage stabilization control structure via sliding-mode technique in islanded micro-grid. Energies 2021, 14, 883. [Google Scholar] [CrossRef]
- Hu, Y.W.; Shao, Y.T.; Yang, R.C. A Configurable Virtual Impedance Method for Grid-Connected Virtual Synchronous Generator to Improve the Quality of Output Current. IEEE J. Emerg. Sel. Top. Power Electron. 2020, 3, 2404–2417. [Google Scholar] [CrossRef]
- Wen, T.L.; Zhu, D.H.; Zou, X.D.; Jiang, B.C. Power coupling mechanism analysis and improved decoupling control for virtual synchronous generator. IEEE Trans. Power Electron. 2021, 36, 3028–3041. [Google Scholar] [CrossRef]
- Wang, Y.; Wai, R.J. Adaptive Fuzzy-Neural-Network Power Decoupling Strategy for Virtual Synchronous Generator in Micro-Grid. IEEE Trans. Power Electron. 2022, 37, 3878–3891. [Google Scholar] [CrossRef]
- Charalambous, A.; Hadjidemetriou, L.; Kyriakides, E. A Coordinated Voltage–Frequency Support Scheme for Storage Systems Connected to Distribution Grids. IEEE Trans. Power Electron. 2021, 36, 8464–8475. [Google Scholar] [CrossRef]
- Zhang, H.; Zhang, X.; Li, M.; Guan, W.; Zhao, W. A Photovoltaic Virtual Synchronous Generator Control Strategy Based on Active Power Reserve. Power Syst. Technol. 2019, 43, 515–519. [Google Scholar]
- Tang, W.B.; Xiao, L.Y.; Shi, L.M.; Wang, Z. Research on the Principle and Structure of a New Energy Storage Technology Named Vacuum Pipeline Maglev Energy Storage. IEEE Access 2020, 8, 89351–89366. [Google Scholar] [CrossRef]
- Nikolaidis, P.; Poullikkas, A. Cost metrics of electrical energy storage technologies in potential power system operations. Sustain. Energy Technol. Assess. 2018, 25, 43–59. [Google Scholar] [CrossRef]
- Superconducting Magnetic Energy Storage (SMES) System. Available online: https://www.researchgate.net/publication/261204920 (accessed on 11 July 2015).
- Guo, W.Y.; Cai, F.Y.; Zhao, C.; Zhang, J.Y. Application and Prospect of Superconducting Magnetic Energy Storage for Renewable Energy. Autom. Electr. Power Syst. 2019, 43, 1–10. [Google Scholar]
- Ngamroo, I. Robust decentralized frequency stabilizers design for SMES taking into consideration system uncertainties. Electr. Power Syst. Res. 2005, 74, 281–292. [Google Scholar] [CrossRef]
- Guo, W.Y. Optimal Power Smoothing Control for Superconducting Fault Current Limiter-Magnetic Energy Storage System. Cryogenics 2021, 116, 103296. [Google Scholar] [CrossRef]
- Linn, Z. Power System Stabilization Control by HVDC with SMES Using Virtual Synchronous Generator. IEEJ J. Ind. Appl. 2012, 1, 102–110. [Google Scholar] [CrossRef]
- You, D.J.; Jang, S.M.; Lee, J.P.; Sung, T.H. Dynamic Performance Estimation of High-Power FESS Using the Operating Torque of a PM Synchronous Motor/Generator. IEEE Trans. Magn. 2008, 44, 4155–4158. [Google Scholar]
- Faraji, F.; Majazi, A.; Al-Haddad, K. A comprehensive review of Flywheel Energy Storage System technology. Renew. Sustain. Energy Rev. 2017, 67, 477–490. [Google Scholar]
- Yu, J.L.; Fang, J.Y.; Tang, Y. Inertia Emulation by Flywheel Energy Storage Systems for Improved Frequency Regulation. In Proceedings of the 2018 IEEE 4th Southern Power Electronics Conference (SPEC), Singapore, 10–13 December 2018. [Google Scholar]
- Yonghui1, N.; Zhang, L.L.; Zhang, L.D.; Gao, L. A VSG-Based Coordinated Control Method for Wind Turbine and Flywheel Energy Storage. Acta Energy Sol. Sin. 2021, 42, 388–392. [Google Scholar]
- Zhang, R.Q.; Fang, J.Y.; Tang, Y. Inertia Emulation through Supercapacitor Energy Storage Systems. In Proceedings of the 2019 10th International Conference on Power Electronics and ECCE Asia (ICPE 2019—ECCE Asia), Busan, Korea, 27–30 May 2019. [Google Scholar]
- Chen, L.; Blaabjerg, F. Virtual Synchronous Generator Based on Type-IV Wind Turbine with Supercapacitor as Storage. In Proceedings of the 2021 IEEE/IAS Industrial and Commercial Power System Asia (I & CPS Asia), Chengdu, China, 18–21 July 2021. [Google Scholar]
- Paucara, J.D.; Peña, J.C.U.; Rosas, D.S.Y. Control Strategy to Provide Frequency Support Functionality Using a Supercapacitor-Based Energy Storage System. In Proceedings of the 2021 IEEE Vehicle Power and Propulsion Conference (VPPC), Gijon, Spain, 25–28 October 2021. [Google Scholar]
- Xu, H.F.; Wang, Y.; Liu, H.; Yang, P. A Capacitor Inertia Based VSG and the Stability Analysis. In Proceedings of the 2021 4th International Conference on Energy, Electrical and Power Engineering (CEEPE), Chongqing, China, 23–25 April 2021. [Google Scholar]
- Liu, Y.H.; Wang, Y.; Wang, M.H.; Xu, Z. Coordinated VSG Control of Photovoltaic/Battery System for Maximum Power Output and Grid Supporting. IEEE J. Emerg. Sel. Top. Circuits Syst. 2022, 12, 301–309. [Google Scholar] [CrossRef]
- Fang, J.Y.; Li, X.O.; Tang, Y. Power management of virtual synchronous generators through using hybrid energy storage systems. In Proceedings of the 2018 IEEE Applied Power Electronics Conference and Exposition (APEC), San Antonio, TX, USA, 4–8 March 2018. [Google Scholar]
- Jain, A.; Padhy, N.P.; Pathak, M.K. Quantification of inertia contribution from non-conventional sources in AC microgrid. In Proceedings of the 2022 IEEE International Conference on Power Electronics, Smart Grid, and Renewable Energy (PESGRE), Trivandrum, India, 2–5 January 2022. [Google Scholar]
- Abeywardana, D.B.W.; Hredzak, B. Supercapacitor sizing method for energy-controlled filter-based hybrid energy storage system. IEEE Trans. Power Electron. 2017, 32, 1626–1637. [Google Scholar] [CrossRef]
- Fang, J.; Tang, Y.; Li, H.; Li, X. A Battery/Ultracapacitor Hybrid Energy Storage System for Implementing the Power Management of Virtual Synchronous Generators. IEEE Trans. Power Electron. 2018, 33, 2820–2824. [Google Scholar] [CrossRef]
- Verdugo, C.; Tarraso, A.; Candela, J.I.; Rocabert, J. Centralized Synchronous Controller Based on Load Angle Regulation for Photovoltaic Power Plants. IEEE J. Emerg. Sel. Top. Power Electron. 2021, 9, 485–496. [Google Scholar] [CrossRef]
- Wang, D.; Wu, H. Application of Virtual Synchronous Generator Technology in Microgrid. In Proceedings of the 2016 IEEE 8th International Power Electronics and Motion Control Conference (IPEMC-ECCE Asia), Hefei, China, 22–26 May 2016. [Google Scholar]
- Zheng, T.; Chen, L.; Liu, W.; Guo, Y. Multi-mode Operation Control for Photovoltaic Virtual Synchronous Generator Considering the Dynamic Characteristics of Primary Source. Proc. CSEE 2017, 37, 454–463. [Google Scholar]
- Islam, K.; Mannan, M.A.; Hazari, R. Virtual Synchronous Generator Control of Stand-Alone PV Station to Enhance Voltage Stability. In Proceedings of the 2021 IEEE Region 10 Symposium (TENSYMP), Jeju, Korea, 23–25 August 2021. [Google Scholar]
- Xiaolin, Z.; Wei, D.; Guanzxiu, Y. Test Method for Inertia and Damping of Photovoltaic Virtual Synchronous Generator Based on Power Angle Transfer Function. In Proceedings of the 2018 2nd IEEE Conference on Energy Internet and Energy System Integration (EI2), Beijing, China, 20–22 October 2018. [Google Scholar]
- Zhang, X.; Li, M.; Guo, Z.; Wang, J.; Han, F. Review and Perspectives on Control Strategies for Renewable Energy Grid-connected Inverters. J. Glob. Energy Interconnect. 2021, 4, 507–512. [Google Scholar]
- Ma, Y.; Cao, W.; Yang, L.; Wang, F. Virtual Synchronous Generator Control of Full Converter Wind Turbines with Short-Term Energy Storage. IEEE Trans. Ind. Electron. 2017, 64, 8821–8831. [Google Scholar] [CrossRef]
- Liserre, M.; Cárdenas, R.; Molinas, M.; Rodriguez, J. Overview of multi-MW wind turbines and wind parks. IEEE Trans. Ind. Electron. 2011, 58, 1081–1095. [Google Scholar] [CrossRef]
- Zhao, Y.; Liu, L.; Wang, L. Virtual Synchronous Grid Interface of Distributed Wind Turbines without PLL. In Proceedings of the 2021 IEEE Sustainable Power and Energy Conference (iSPEC), Nanjing, China, 23–25 December 2021. [Google Scholar]
- Liu, X.; Xu, Z.; Jian, Z. Combined primary frequency control strategy of permanent magnet synchronous generator-based wind turbine. Electr. Power Compon. Syst. 2019, 46, 1704–1718. [Google Scholar] [CrossRef]
- Li, Y.; Xu, Z.; Zhang, J.; Wong, K.P. Variable gain control scheme of DFIG-based wind farm for over-frequency support. Renew. Energy 2018, 120, 379–391. [Google Scholar] [CrossRef]
- Arani, M.F.M.; El-Saadany, E.F. Implementing virtual inertia in DFIG-Based Wind power generation. IEEE Trans. Power Syst. 2013, 28, 1373–1384. [Google Scholar] [CrossRef]
- Zeng, X.; Liu, T.; Wang, S.; Dong, Y.; Chen, Z. Comprehensive coordinated control strategy of PMSG-based wind turbine for providing frequency regulation services. IEEE Access 2019, 7, 63944–63953. [Google Scholar] [CrossRef]
- Jiang, Q.; Zeng, X.; Li, B.; Wang, S. Time-Sharing Frequency Coordinated Control Strategy for PMSG-Based Wind Turbine. IEEE J. Emerg. Sel. Top. Circuits Syst. 2022, 12, 268–278. [Google Scholar] [CrossRef]
- Yue, M. Grid Inertial Response-Based Probabilistic Determination of Energy Storage System Capacity under High Solar Penetration. In Proceedings of the 2015 IEEE Power & Energy Society General Meeting, Denver, CO, USA, 26–30 July 2015. [Google Scholar]
- Bera, A.; Abdelmalak, M.; Alzahrani, S.; Benidris, M. Sizing of Energy Storage Systems for Grid Inertial Response. In Proceedings of the 2020 IEEE Power & Energy Society General Meeting (PESGM), Montreal, QC, Canada, 2–6 August 2020. [Google Scholar]
- Li, Z.; Zhang, Z.; He, T.; Song, P. Research on Harmonic Resonance Mechanism and Inhibition Strategy of LC Type Energy Storage Virtual Synchronous Generator. In Proceedings of the 2018 International Conference on Power System Technology (POWERCON), Guangzhou, China, 6–8 November 2018. [Google Scholar]
- Xu, J.; Xie, S.; Xiao, H. Research on Control Mechanism of Active Damping for LCL Filters. Proc. CSEE 2012, 32, 27–33. [Google Scholar]
- Chen, X.; Wei, Z.; Hu, X.; Cen, Y.; Gong, C. Research on LCL Filter in Three-Phase Grid-Connected Inverter and Novel Active Damping Control Strategy. Trans. China Electrotech. Soc. 2014, 29, 72–77. [Google Scholar]
- Long, W.; Nilsson, S. HVDC transmission: Yesterday and today. IEEE Power Energy Mag. 2007, 5, 22–31. [Google Scholar] [CrossRef]
- Farshad, M.; Sadeh, J. A Novel Fault-Location Method for HVDC Transmission Lines Based on Similarity Measure of Voltage Signals. IEEE Trans. Power Deliv. 2013, 28, 2483–2490. [Google Scholar] [CrossRef]
- Fuchs, A.; Imhof, M.; Demiray, T.; Morar, M. Stabilization of Large Power Systems Using VSC̢HVDC and Model Predictive Control. In Proceedings of the 2016 IEEE Power and Energy Society General Meeting (PESGM), Boston, MA, USA, 17–21 July 2016. [Google Scholar]
- Shen, Y.; Chen, W.; Yao, W.; Liao, S. Supplementary damping control of VSC-HVDC for interarea oscillation using goal representation heuristic dynamic programming. In Proceedings of the 12th IET International Conference on AC and DC Power Transmission (ACDC 2016), Beijing, China, 28–29 May 2016. [Google Scholar]
- Liu, X.; Sun, P.; Arraño-Vargas, F.; Konstantinou, G. Provision of Synthetic Inertia by Alternate Arm Converters in VSC-HVDC Systems. In Proceedings of the 2021 31st Australasian Universities Power Engineering Conference (AUPEC), Perth, Australia, 26–30 September 2021. [Google Scholar]
- Leon, A.E.; Mauricio, J.M. Virtual Synchronous Generator for VSC-HVDC Stations with DC Voltage Control. IEEE Trans. Power Syst. 2022, 1–1. [Google Scholar] [CrossRef]
- Wang, W.; Jiang, L.; Cao, Y.; Li, Y. A Parameter Alternating VSG Controller of VSC-MTDC Systems for Low Frequency Oscillation Damping. IEEE Trans. Power Syst. 2020, 35, 4609–4621. [Google Scholar] [CrossRef]
- Huang, L.; Xin, H.; Wang, Z. Damping Low-Frequency Oscillations through VSC-HVdc Stations Operated as Virtual Synchronous Machines. IEEE Trans. Power Electron. 2019, 34, 5803–5818. [Google Scholar] [CrossRef]
- Pérez, J.R.; Suul, J.A.; D’Arco, S.; Rodríguez-Cabero, A. Virtual synchronous machine control of vsc hvdc for power system oscillation damping. In Proceedings of the IECON 2018—44th Annual Conference of the IEEE Industrial Electronics Society, Washington, DC, USA, 21–23 October 2018. [Google Scholar]
- Huang, L.; Xin, H.; Yang, H.; Wang, Z. Interconnecting very weak AC systems by multiterminal VSC-HVDC links with a unified virtual synchronous control. IEEE J. Emerg. Sel. Top. Power Electron. 2018, 6, 1041–1053. [Google Scholar] [CrossRef]





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| VSG Type | Subtype | Advantages | Disadvantages |
|---|---|---|---|
| CC-VSG | Basic CC-VSG [10] |
|
|
| VISMA [19] |
|
| |
| VC-VSG | Basic VC-VSG [16] |
|
|
| Synchronverter [6] |
|
|
| Category | VSI | CSI |
|---|---|---|
| DC link energy storage device | Capacitor | Inductor |
| Output form | square wave High-frequency voltage | square wave High-frequency current |
| Diode position | Antiparallel | Series |
| Output voltage characteristics | Buck | Boost |
| Δw | Mode | Alternating J | |
|---|---|---|---|
| > 0 | > 0 | Accelerating | Big value of J |
| > 0 | < 0 | Decelerating | Small value of J |
| < 0 | < 0 | Accelerating | Big value of J |
| < 0 | > 0 | Decelerating | Small value of J |
| Characters | Energy Storage | Power Reservation |
|---|---|---|
| Investment cost | high | low |
| RES power generation efficiency | high | low |
| Weather dependency | low | high |
| Control difficulty | low | high |
| Object | Functional Localization | Requirements to ESDs |
|---|---|---|
| Inertia support | Slowing down the rate of change in frequency. | Fast power response; High power requirement; Low energy requirement. |
| Primary frequency regulation | Providing continuous active power support in response to the frequency deviation of the grid. | Slow power response; Low power requirement; High energy requirement. |
| The Type of Energy Storage | Supercapacitor Energy Storage | Flywheel Energy Storage | Lithium Battery Energy Storage | Superconducting Magnetic Energy Storage |
|---|---|---|---|---|
| Power capability (MW) | 0.05–0.1 | 0.1–20 | 0.015–50 | 1–10 |
| Efficiency (%) | 65–80 | 85–96 | 90–95 | >95 |
| Cost (¥/kWh) | 1500–2000 | 400–800 | 260–800 | 1000–7000 |
| Life time | 500 k times | >15 years | 3–15 k times | >30 years |
| Power density | 800–11,000 W/kg | 5000–11,900 W/kg | 150–2000 W/kg | 500–2000 W/kg [67] |
| Energy density | 1–8 Wh/kg | 5–100 Wh/kg | 80–150 Wh/kg | 1–10 Wh/kg |
| Response time | <1 millisecond | <2 millisecond | <100 millisecond | <2 millisecond |
| Charge time | Second | Minute | Hour | Second |
| Technical maturity | Commercial application | Demonstration to Commercial application | Commercial application | Demonstration |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sang, W.; Guo, W.; Dai, S.; Tian, C.; Yu, S.; Teng, Y. Virtual Synchronous Generator, a Comprehensive Overview. Energies 2022, 15, 6148. https://doi.org/10.3390/en15176148
Sang W, Guo W, Dai S, Tian C, Yu S, Teng Y. Virtual Synchronous Generator, a Comprehensive Overview. Energies. 2022; 15(17):6148. https://doi.org/10.3390/en15176148
Chicago/Turabian StyleSang, Wenju, Wenyong Guo, Shaotao Dai, Chenyu Tian, Suhang Yu, and Yuping Teng. 2022. "Virtual Synchronous Generator, a Comprehensive Overview" Energies 15, no. 17: 6148. https://doi.org/10.3390/en15176148