
Robust Voltage Control of a Buck DC-DC Converter: A Sliding Mode Approach

Abstract
:1. Introduction
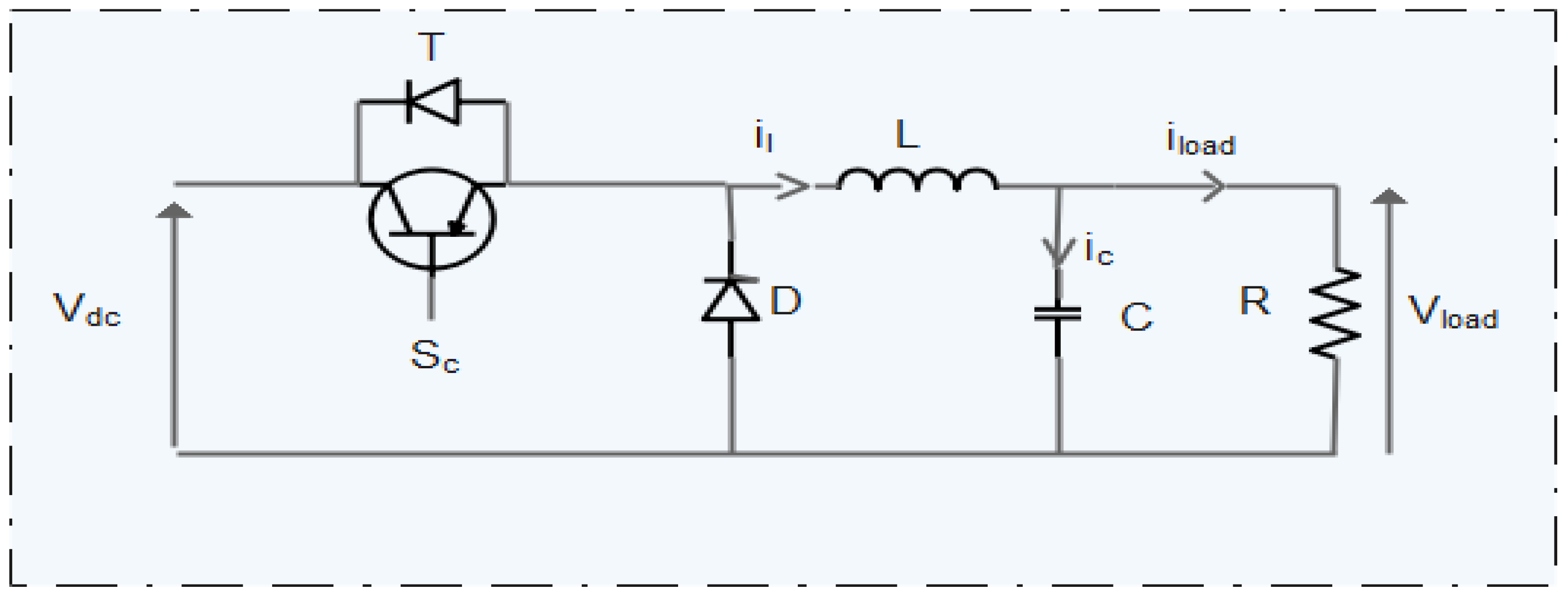
2. Modelling of DC-DC Buck Converter Mathematical
2.1. Bilinear Switching Model of DC-DC Buck Converter
2.2. Averaged Dynamic Model of DC-DC Buck Converter
2.3. Small Signal Dynamic Model of DC-DC Buck Converter
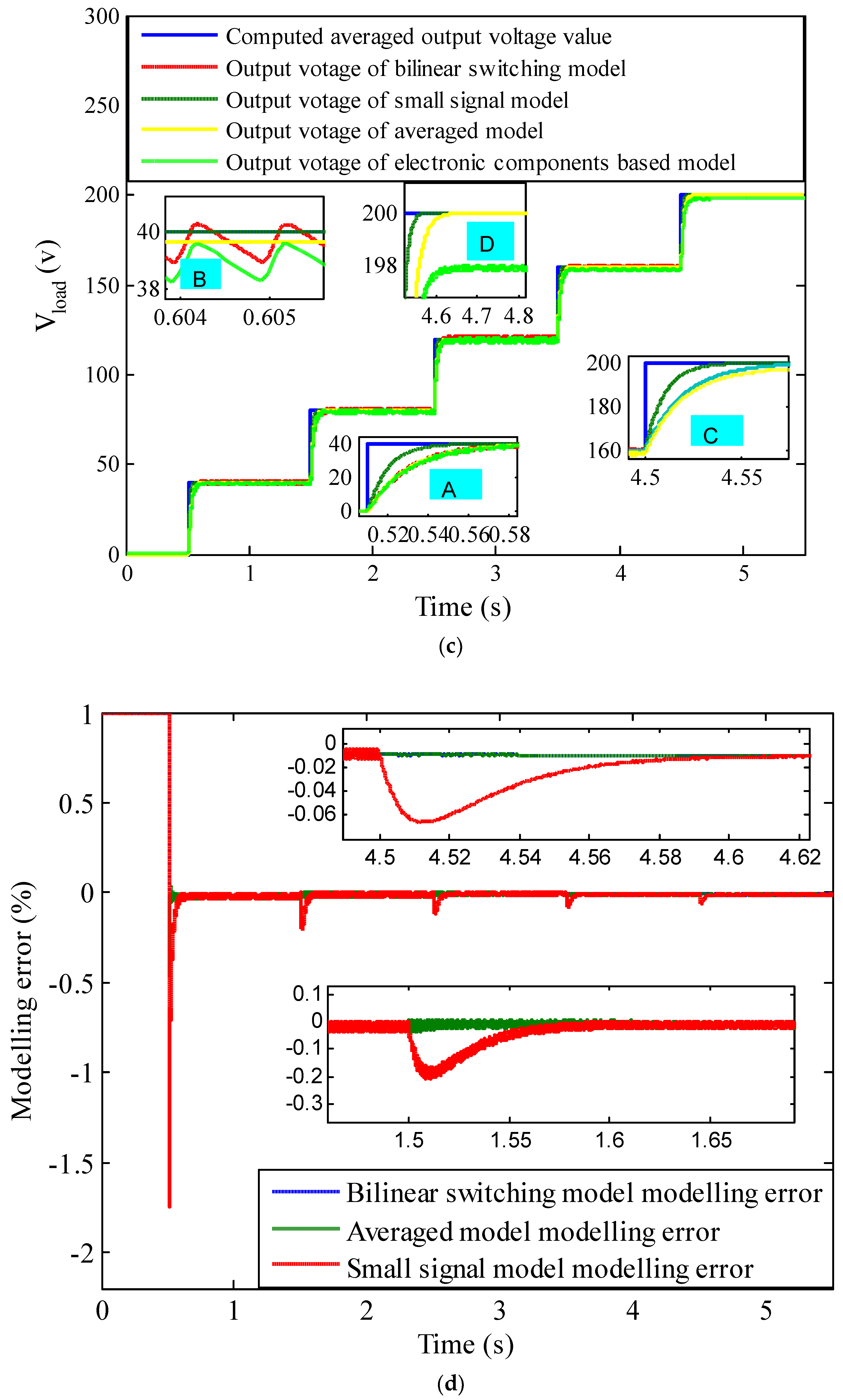
2.4. Comparative Study
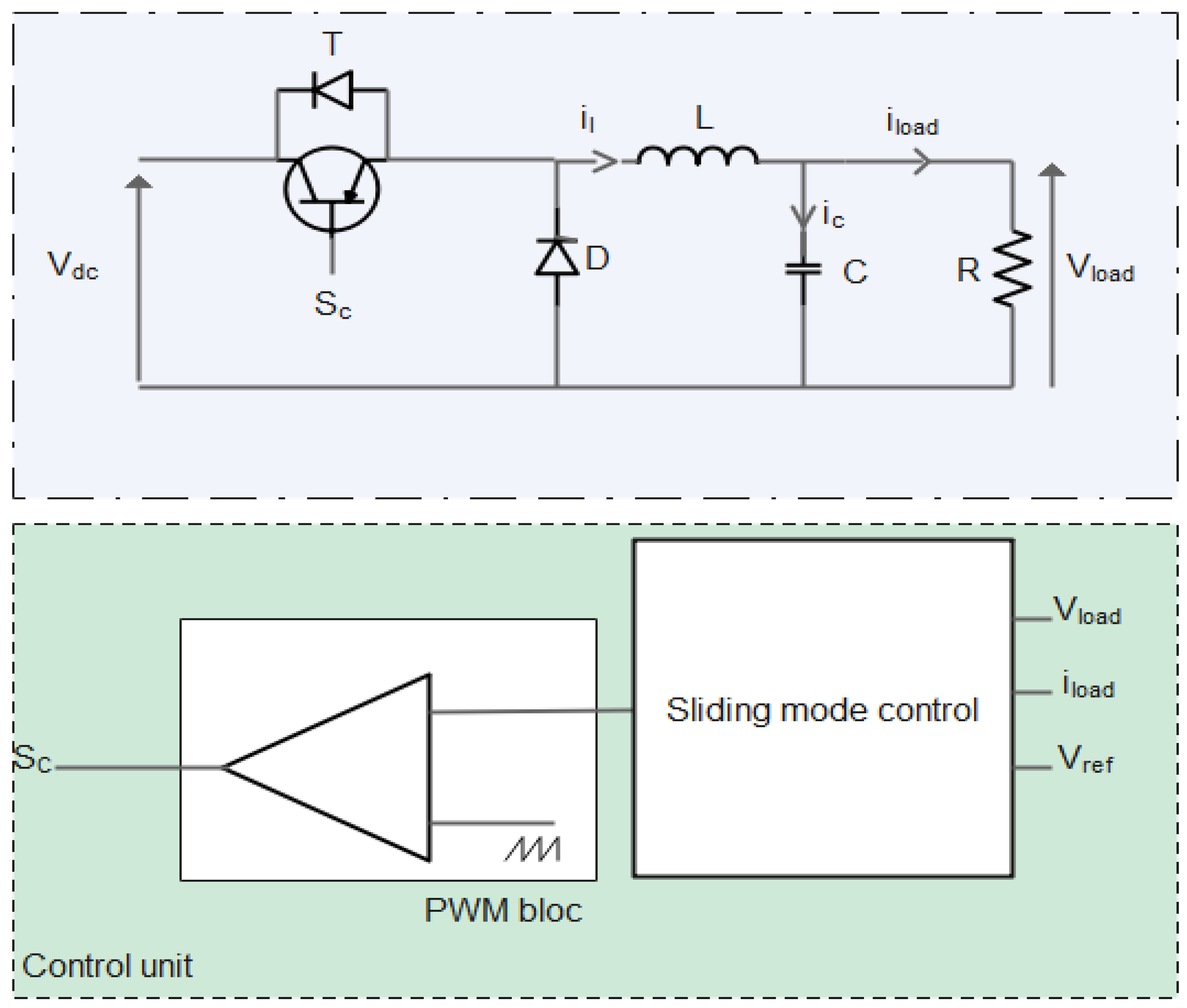
3. Sliding Mode Control Approach for Buck Converter Voltage Control
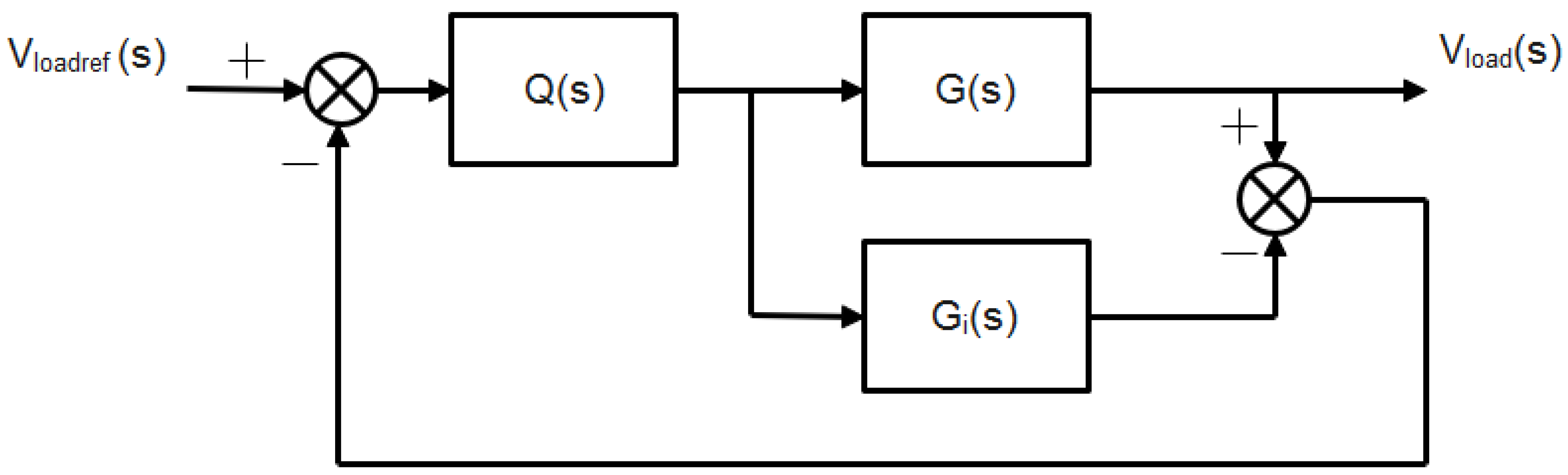
4. Internal Model Control Approach for Buck Converter Voltage Control
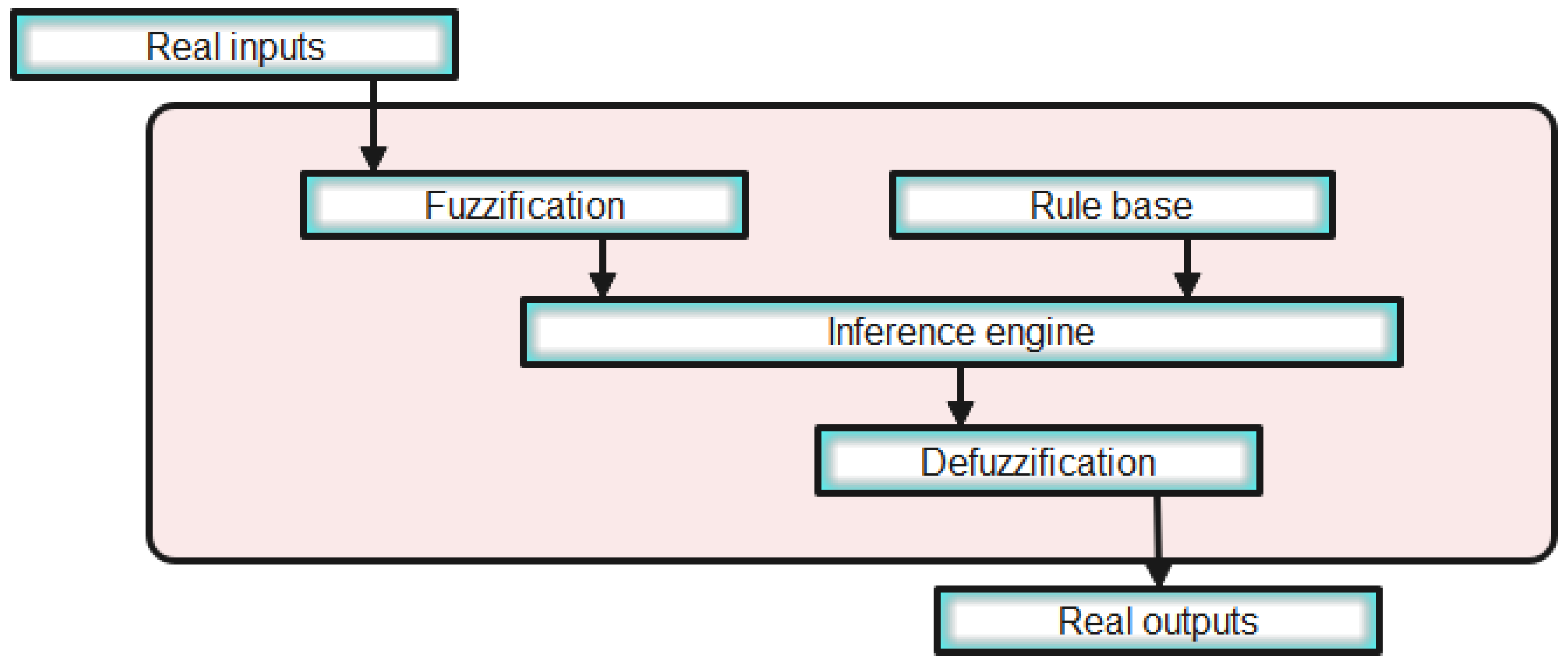
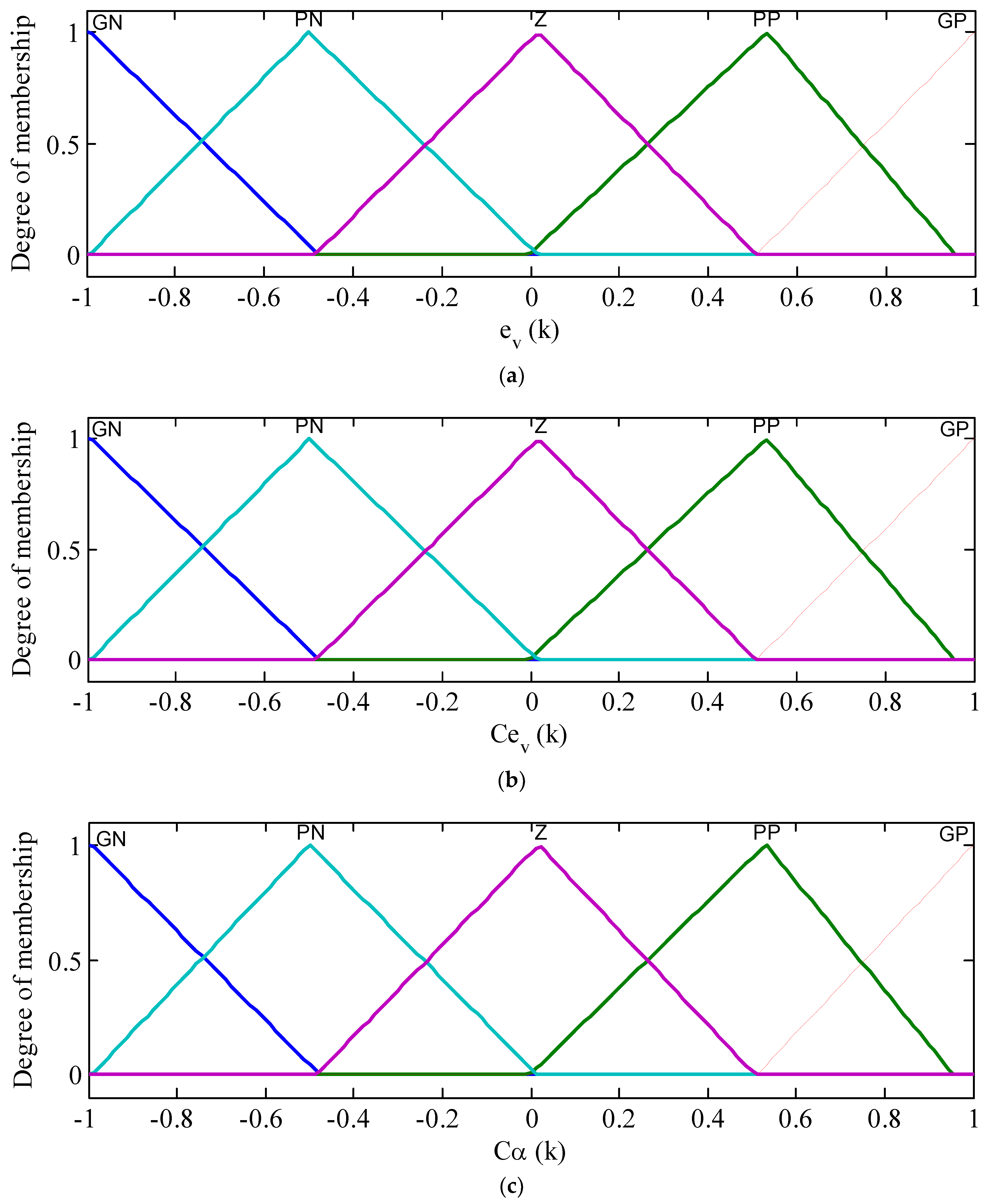
5. Fuzzy Logic for Buck Converter Voltage Control
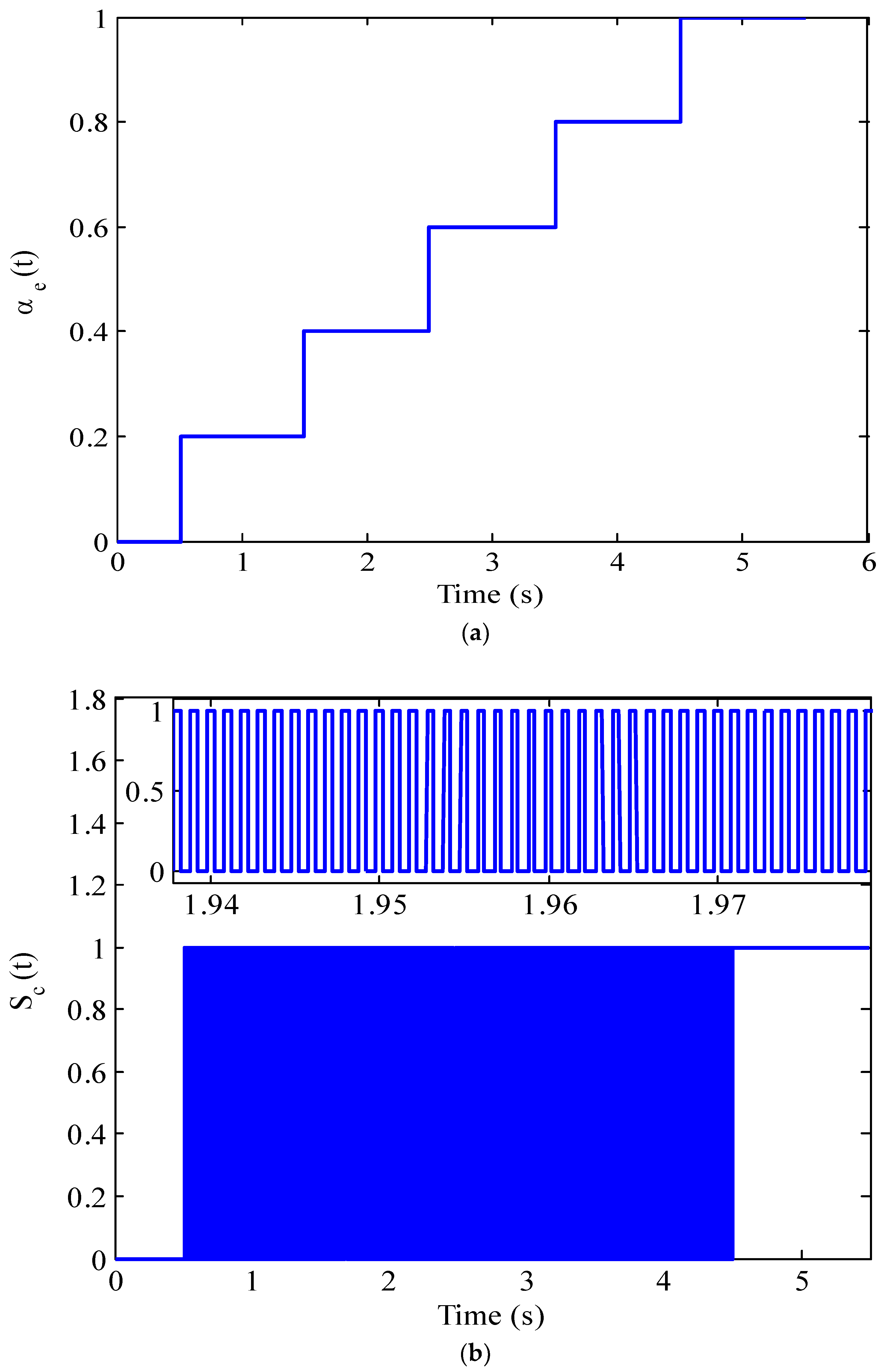
6. Simulation Results
6.1. Sliding Mode Parameter Choice
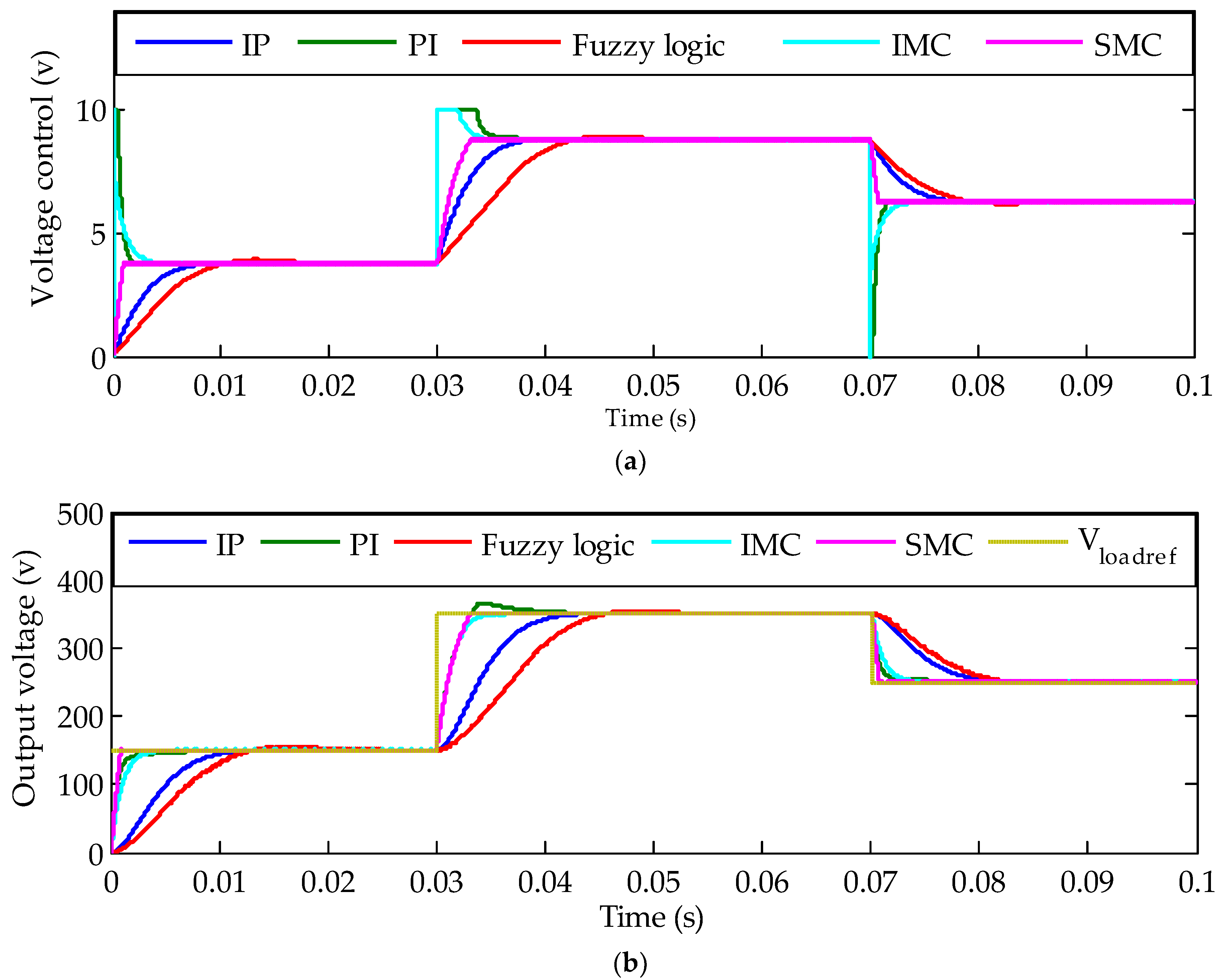
6.2. Controller’s Behavior under Abrupt Target Output Voltage Variations
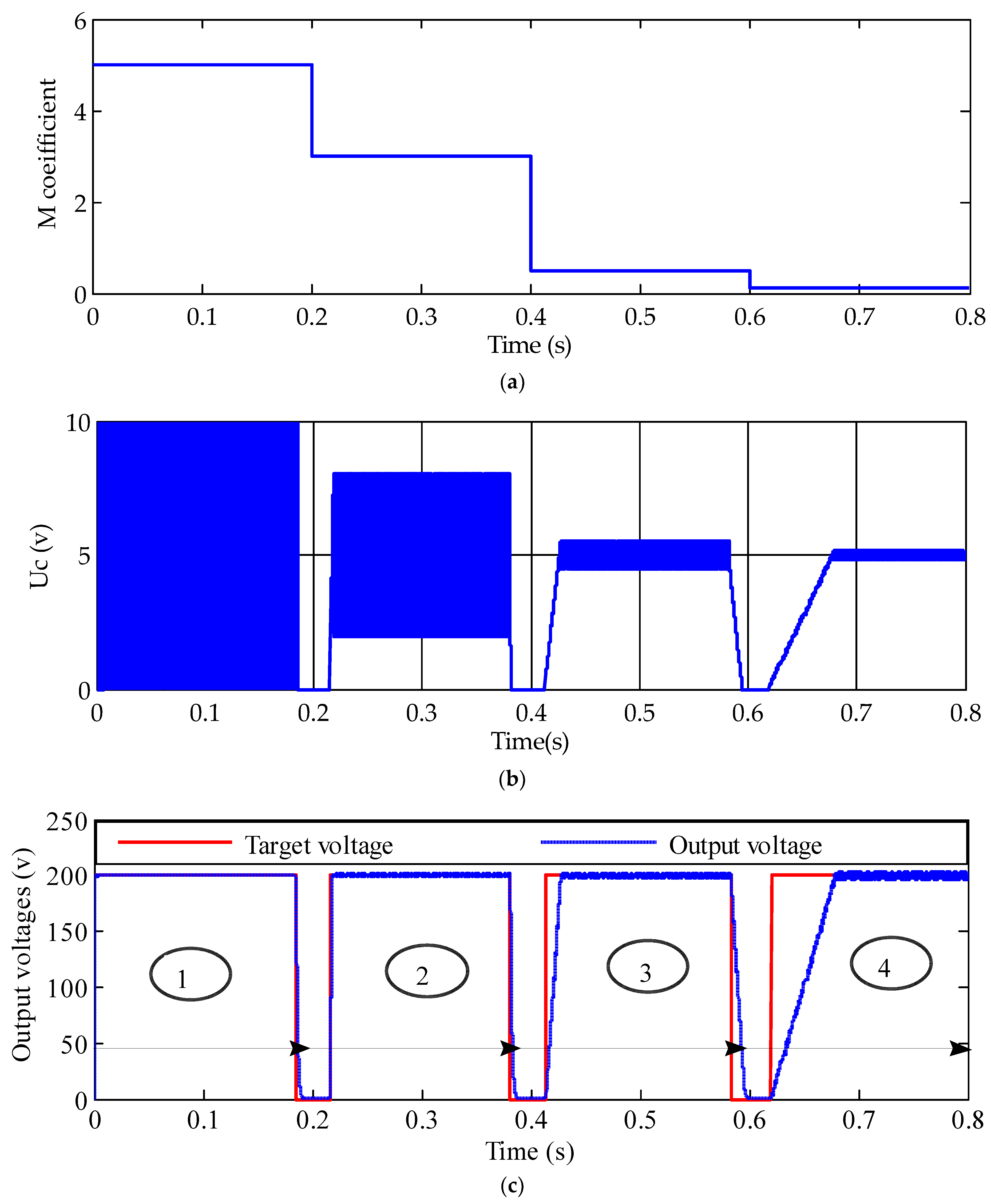
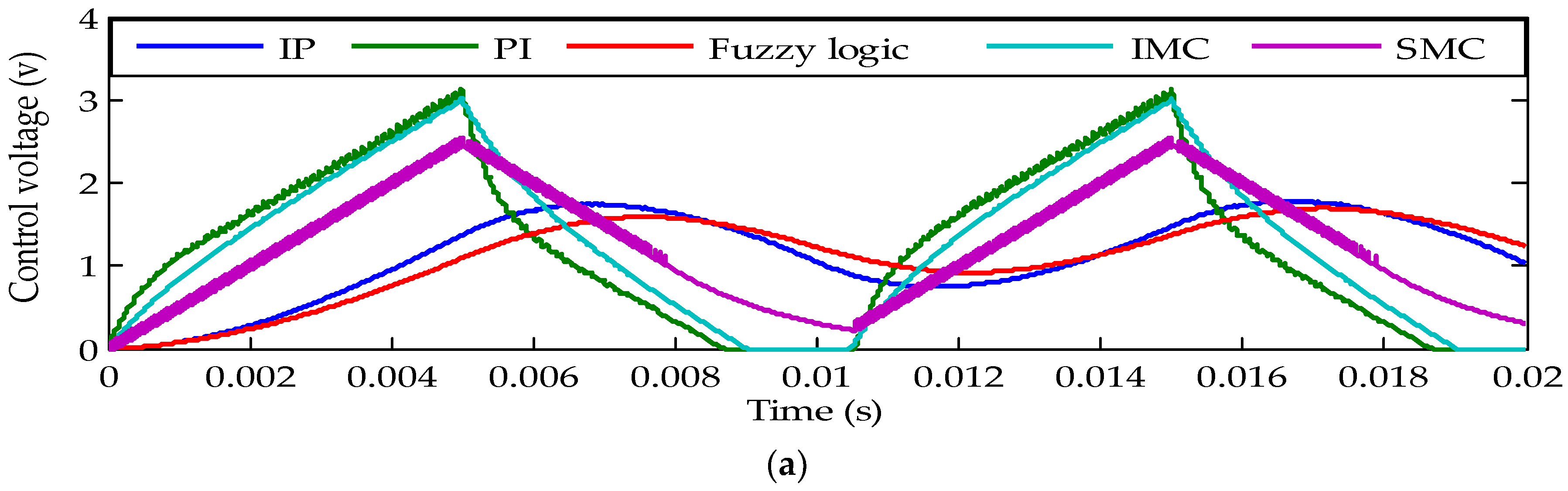
6.3. Controller’s Behavior under Triangular Target Output Voltage Variations
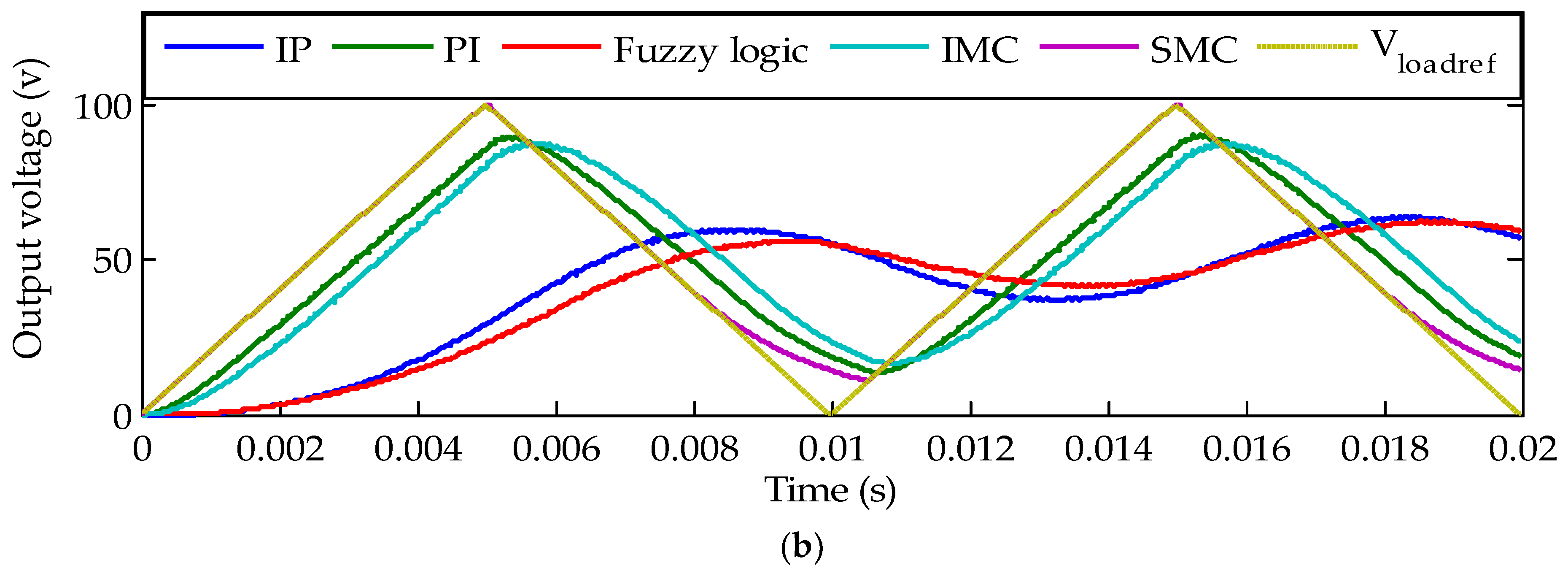
6.4. Controller’s Behavior under Input Voltage Variations
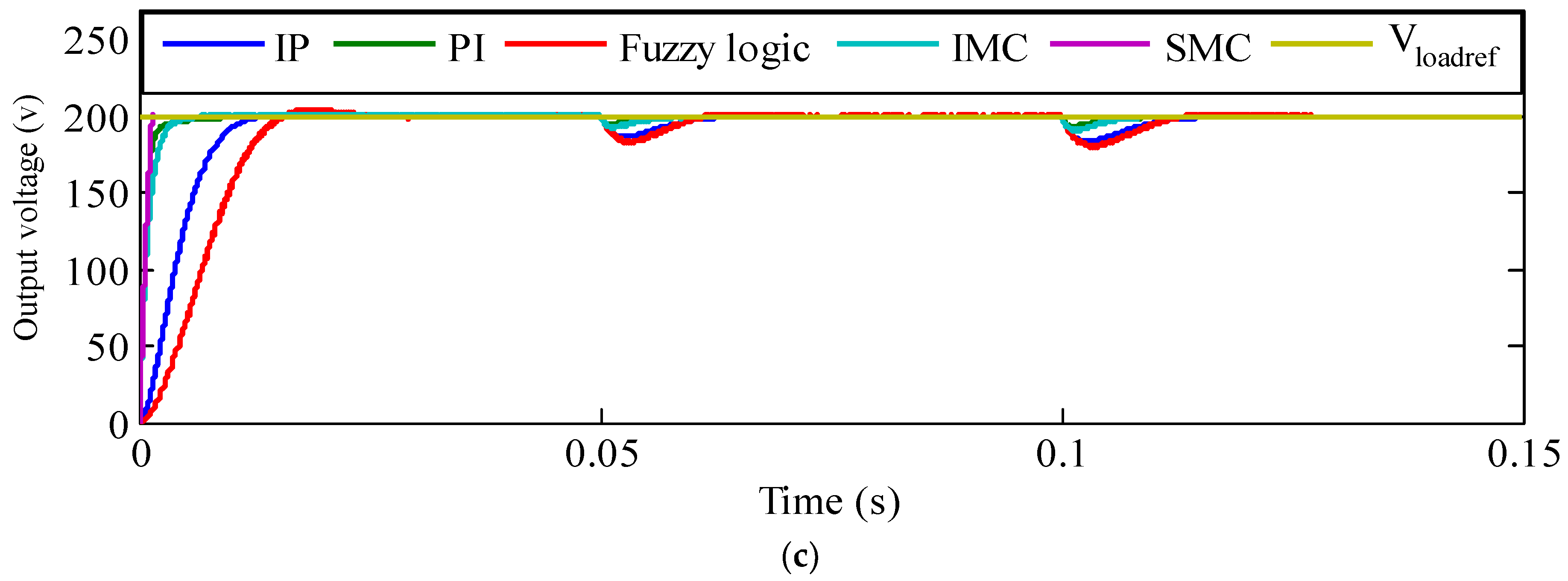
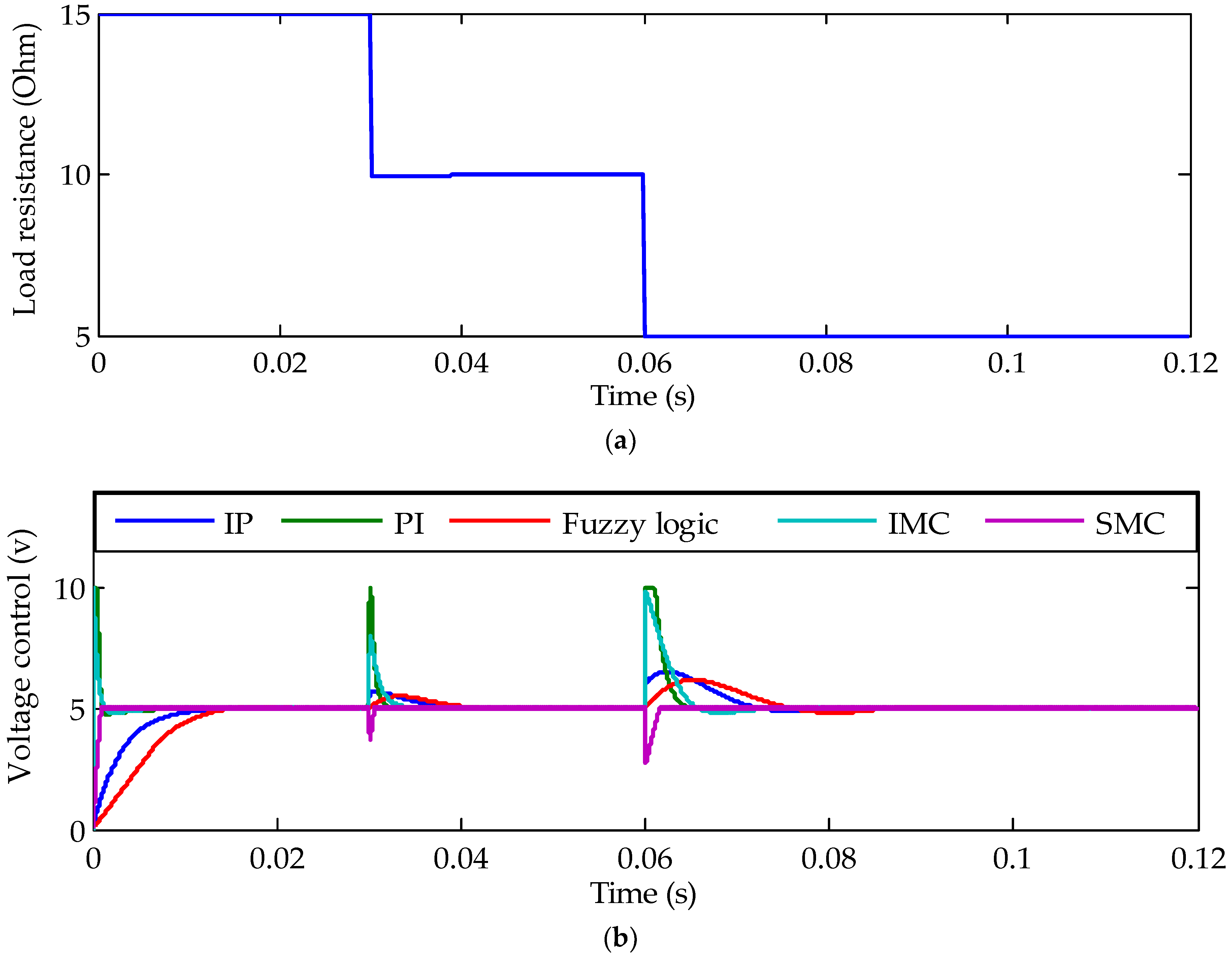
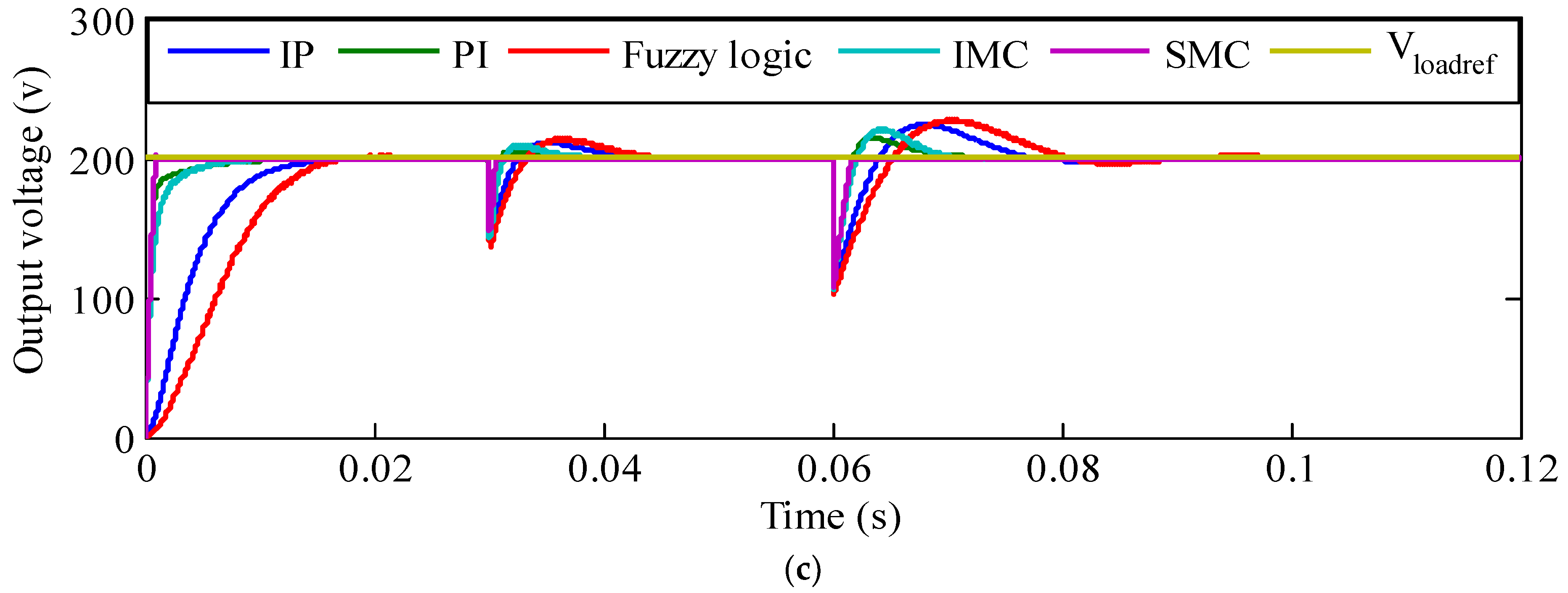
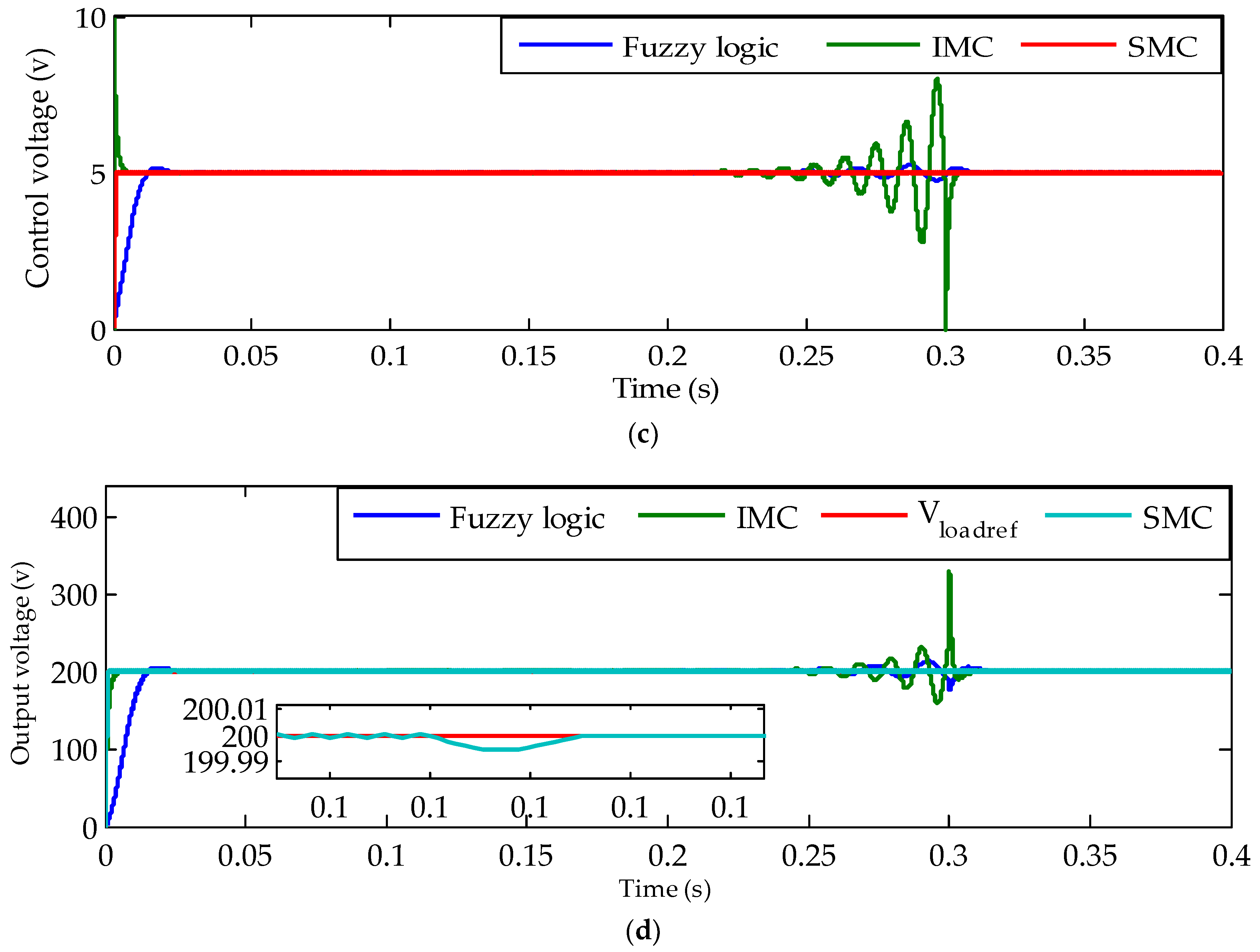
6.5. Controller’s Behavior under Resistor Load Variations
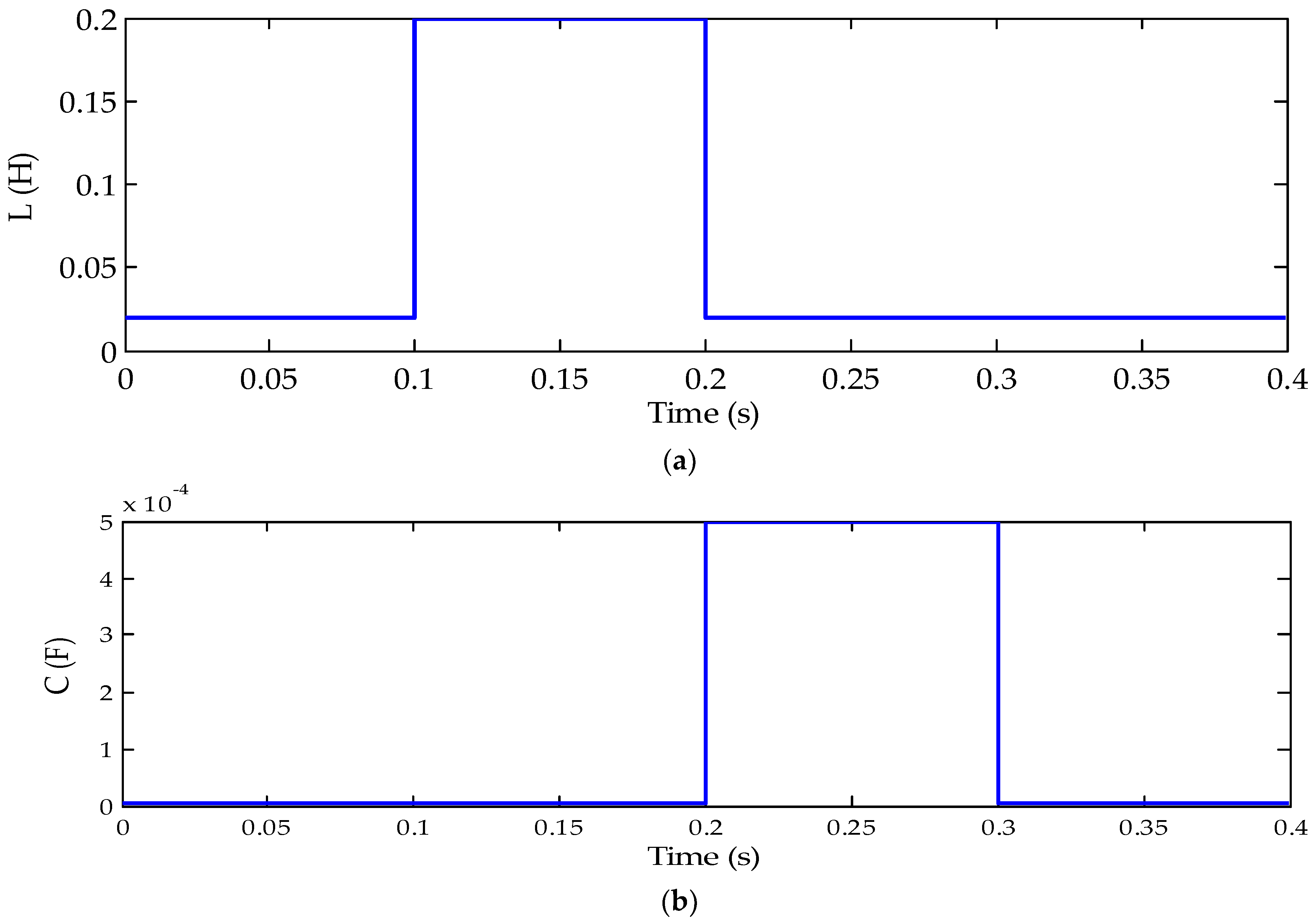
6.6. Controller’s Behavior under DC-DC Buck Converter Parameter Variations
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Roncancio, J.S.; Vuelvas, J.; Patino, D.; Correa-Flórez, C.A. Flower greenhouse energy management to offer local flexibility markets. Energies 2022, 15, 4572. [Google Scholar] [CrossRef]
- Turoń, K.; Kubik, A.; Chen, F. What Car for Car-Sharing? Conventional Electric, Hybrid or Hydrogen Fleet? Analysis of the Vehicle Selection Criteria for Car-Sharing Systems. Energies 2022, 15, 4344. [Google Scholar] [CrossRef]
- Fady, M. Urban Freight Transport Electrification in Westbank, Palestine: Environmental and Economic Benefits. Energies 2022, 15, 4058. [Google Scholar]
- Sun, L.; Zhang, T.; Liu, S.; Wang, K.; Rogers, T.; Yao, L.; Zhao, P. Reducing energy consumption and pollution in the urban transportation sector: A review of policies and regulations in Beijing. J. Clean. Prod. 2021, 285, 125339. [Google Scholar] [CrossRef]
- Streltsov, A.; Malof, J.M.; Huang, B.; Bradbury, K. Estimating residential building energy consumption using overhead imagery. Appl. Energy 2020, 280, 116018. [Google Scholar] [CrossRef]
- Bandara, W.C.; Godaliyadda, G.M.R.I.; Ekanayake, M.P.B.; Ekanayake, J.B. Coordinated photovoltaic re-phasing: A novel method to maximize renewable energy integration in low voltage networks by mitigating network unbalances. Appl. Energy 2020, 285, 116022. [Google Scholar] [CrossRef]
- Guo, S.; Liu, Q.; Sun, J.; Jin, H. A review on the utilization of hybrid renewable energy. Renew. Sustain. Energy Rev. 2018, 91, 1121–1147. [Google Scholar] [CrossRef]
- Nie, P.; Roccotelli, M.; Fanti, M.P.; Ming, Z.; Li, Z. Prediction of home energy consumption based on gradient boosting regression tree. Energy Rep. 2021, 7, 1246–1255. [Google Scholar] [CrossRef]
- Mofidipour, E.; Babaelahi, M. New procedure in solar system dynamic simulation, thermodynamic analysis, and multi-objective optimization of a post-combustion carbon dioxide capture coal-fired power plant. Energy Convers. Manag. 2020, 224, 113321. [Google Scholar] [CrossRef]
- Aboagye, B.; Gyamfi, S.; Ofosu, E.A.; Djordjevic, S. Status of renewable energy resources for electricity supply in Ghana. Sci. Afr. 2020, 11, e00660. [Google Scholar] [CrossRef]
- IEA. World Energy Outlook 2015; OECD/IEA: Paris, France, 2015. [Google Scholar]
- NREL. Photovoltaic System Pricing Trends: Historical, Recent, and Near-Term Projections; National Renewable Energy Laboratory: Golden, CO, Canada, 2015. [Google Scholar]
- Panwar, N.L.; Kaushik, S.C.; Kothari, S. Role of renewable energy sources in environmental protection: A review. Renew. Sustain. Energy Rev. 2011, 15, 1513–1524. [Google Scholar] [CrossRef]
- Nassar, Y.F.; Abdunnabi, M.J.; Sbeta, M.N.; Hafez, A.A.; Amer, K.A.; Ahmed, A.Y.; Belgasim, B. Dynamic analysis and sizing optimization of a pumped hydroelectric storage-integrated hybrid PV/Wind system: A case study. Energy Convers. Manag. 2021, 229, 113744. [Google Scholar] [CrossRef]
- Leirpoll, M.E.; Næss, J.S.; Cavalett, O.; Dorber, M.; Hu, X.; Cherubini, F. Optimal combination of bioenergy and solar photovoltaic for renewable energy production on abandoned cropland. Sol. Energy 2021, 168, 45–56. [Google Scholar] [CrossRef]
- Tervo, E.J.; Callahan, W.A.; Toberer, E.S.; Steiner, M.A.; Ferguson, A.J. Solar thermoradiative-photovoltaic energy conversion. Cell Rep. Phys. Sci. 2020, 1, 100258. [Google Scholar] [CrossRef]
- Mellit, A.; Rezzouk, H.; Messai, A.; Mejahed, B. FPGA–based real time implementation of MPPT controller for photovoltaic systems. Renew. Energy 2011, 36, 1652–1661. [Google Scholar] [CrossRef]
- Houssamo, I.; Locment, F.; Sechilariu, M. Maximum power tracking for photovoltaic power system: Development and experimental comparison of two algorithms. Renew. Energy 2010, 35, 2381–2387. [Google Scholar] [CrossRef]
- Goudan, N.A.; Peter, S.A.; Nallandula, H.; Krithiga, S. Fuzzy logic controller with MPPT using line commutated inverter for three phase grid connected photovoltaic systems. Renew. Energy 2009, 34, 900–915. [Google Scholar]
- Ko, S.H.; Chao, R.M. Photovoltaic dynamic MPPT on a moving vehicle. Sol. Energy 2012, 86, 1750–1760. [Google Scholar] [CrossRef]
- Dawoud, S.M. Developing different hybrid renewable sources of residential loads as a reliable method to realize energy sustainability. Alex. Eng. J. 2021, 60, 2435–2445. [Google Scholar] [CrossRef]
- Debastiani, G.; Nogueira, C.E.C.; Acorci, J.M.; Silveira, V.F.; Siqueira, J.A.C.; Baron, L.C. Assessment of the energy efficiency of a hybrid wind-photovoltaic system for Cascavel. Renew. Sustain. Energy Rev. 2020, 131, 110013. [Google Scholar] [CrossRef]
- Loukil, K.; Abbes, H.; Abid, H.; Abid, M.; Toumi, A. Design and implementation of reconfigurable MPPT fuzzy controller for photovoltaic systems. Ain Shams Eng. J. 2019, 11, 319–328. [Google Scholar] [CrossRef]
- Padmanaban, S.; Priyadarshi, N.; Bhaskar, M.S.; Holm-Nielsen, J.B.; Hossain, E.; Azam, F. A hybrid photovoltaic fuel cell for grid integration with Jaya-based maximum power point tracking:experimental performance evaluation. IEEE Access 2019, 7, 82978–82990. [Google Scholar] [CrossRef]
- Priyadarshi, N.; Padmanaban, S.; Maroti, P.K.; Sharma, A. An extensive practical investigation of FPSO-based MPPT for grid integrated PV system under variable operating conditions with anti-islanding protection. IEEE Syst. J. 2019, 13, 1861–1871. [Google Scholar] [CrossRef] [Green Version]
- Shahid, H.; Kamran, M.; Mehmood, Z.; Saleem, M.Y.; Mudassar, M.; Haider, K. Implementation of the novel temperature controller and incremental conductance MPPT algorithm for indoor photovoltaic system. Sol. Energy 2018, 163, 235–242. [Google Scholar] [CrossRef]
- Bouchama, Z.; Khatir, A.; Benaggoune, S.; Harmas, M.N. Design and experimental validation of an intelligent controller for dc–dc buck converters. J. Frankl. Inst. 2020, 357, 10353–10366. [Google Scholar] [CrossRef]
- Batiyah, S.; Sharma, R.; Abdelwahed, S.; Alhosaini, W.; Aldosari, O. Predictive Control of PV/Battery System under Load and Environmental Uncertainty. Energies 2022, 15, 4100. [Google Scholar] [CrossRef]
- Chen, L.; Zheng, P.; Gao, W.; Jiang, J.; Chang, J.; Wu, R.; Ai, C. Frequency Modulation Control of Hydraulic Wind Turbines Based on Ocean Used Wind Turbines and Energy Storage. Energies 2022, 15, 4086. [Google Scholar] [CrossRef]
- Akram, N.; Khan, L.; Agha, S.; Hafeez, K. Global Maximum Power Point Tracking of Partially Shaded PV System Using Advanced Optimization Techniques. Energies 2022, 15, 4055. [Google Scholar] [CrossRef]
- Ge, Q.; Li, Z.; Sun, Z.; Xu, J.; Long, H.; Sun, T. Low Resistance Hot-Spot Diagnosis and Suppression of Photovoltaic Module Based on I-U Characteristic Analysis. Energies 2022, 15, 3950. [Google Scholar] [CrossRef]
- Olalla, C.; Rodriguez, M.; Clement, D.; Maksimovic, D. Architectures and Control of Sub module Integrated DC-DC Converters for Photovoltaic Applications. IEEE Trans. Power Electron. 2012, 28, 2980–2997. [Google Scholar] [CrossRef]
- Pilawa-Podgurski, R.C.N.; Perreault, D.J. Submodule integrated distributed maximum power point tracking for solar photovoltaic applications. IEEE Trans. Power Electron. 2013, 28, 2957–2967. [Google Scholar] [CrossRef] [Green Version]
- Carbone, R.; Borrello, C. Experimenting with a Battery-Based Mitigation Technique for Coping with Predictable Partial Shading. Energies 2022, 15, 4146. [Google Scholar] [CrossRef]
- Aluko, A.; Buraimoh, E.; Oni, O.E.; Davidson, I.E. Advanced Distributed Cooperative Secondary Control of Islanded DC Microgrids. Energies 2022, 15, 3988. [Google Scholar] [CrossRef]
- Guldemir, H. Study of sliding mode control of DC-DC buck converter. Energy Power Eng. 2011, 3, 401–406. [Google Scholar] [CrossRef] [Green Version]
- He, Y.; Luo, F.L. Study of sliding mode control for DC-DC converters. In Proceedings of the 2004 International Conference on Power System Technology, Singapore, 21–24 November 2004. [Google Scholar]
- Babes, B.; Boutaghane, A.; Hamouda, N.; Mezaache, M. Design of a Robust Voltage Controller for a DC-DC Buck Converter Using Fractional-Order Terminal Sliding Mode Control Strategy. In Proceedings of the 2019 International Conference on Advanced Electrical Engineering (ICAEE), Algiers, Algeria, 19–21 November 2019; pp. 1–6. [Google Scholar]
- Qamar, M.A.; Feng, J.; Rehman, A.U.; Raza, A. Discrete time sliding mode control of DC-DC buck converter. In Proceedings of the 2015 IEEE Conference on Systems, Process and Control (ICSPC), Sunway, Malaysia, 18–20 December 2015; pp. 91–95. [Google Scholar]
- Wang, Z.; Shihua, L.; Qi, L. Discrete-Time Fast Terminal Sliding ModeControl Design for DC–DC Buck Converters with Mismatched Disturbances. IEEE Trans. Ind. Inform. 2020, 16, 1204–1213. [Google Scholar] [CrossRef]
- Dehri, K.; Nouri, A.S. A discrete repetitive adaptive sliding mode control for DC-DC buck converter. Proc. Inst. Mech. Eng. I J. 2021, 235, 1698–1708. [Google Scholar] [CrossRef]
- Mobayen, S.; Bayat, F.; Lai, C.-C.; Taheri, A.; Fekih, A. Adaptive Global Sliding Mode Controller Design for Perturbed DC-DC Buck Converters. Energies 2021, 14, 1249. [Google Scholar] [CrossRef]
- Rakhtala, S.M.; Yasoubi, M.; Hosseinnia, H. Design of second order sliding mode and sliding mode algorithms: A practical insight to DC-DC buck converter. IEEE/CAA J. Autom. Sin. 2017, 4, 483–497. [Google Scholar] [CrossRef] [Green Version]
- Shi, S.; Xu, S.; Gu, J.; Min, H. Global High-Order Sliding Mode Controller Design Subject to Mismatched Terms: Application to Buck Converter. IEEE Trans. Circuits Syst. 2019, 66, 4840–4849. [Google Scholar] [CrossRef]
- Chi, X.; Lin, F.; Wang, Y. Disturbance and Uncertainty-Immune Onboard Charging Batteries With Fuel Cell by Using Equivalent Load Fuzzy Logic Estimation-Based Backstepping Sliding-Mode Control. IEEE Trans. Transp. Electrif. 2021, 7, 1249–1259. [Google Scholar] [CrossRef]
- Meng, Z.; Shao, W.; Tang, J.; Zhou, H. Sliding-Mode Control Based on Index control. Law for MPPT in Photovoltaic Systems. CES Trans. Electr. Mach. Syst. 2018, 2, 303–311. [Google Scholar] [CrossRef]
- Roy, T.K.; Faria, F.; Ghosh, S.K.; Pramanik, A.H. Robust Adaptive Backstepping Sliding Mode Controller for a DC-DC Buck Converter Fed DC Motor. In Proceedings of the 2021 Joint 10th International Conference on Informatics, Electronics & Vision (ICIEV) and 2021 5th International Conference on Imaging, Vision & Pattern Recognition (icIVPR), Virtual, 16–20 August 2021; pp. 1–6. [Google Scholar]
- Lim, S.; Kim, S.-K.; Kim, Y. Active Damping Injection Output Voltage Control with Dynamic Current Cut-Off Frequency for DC/DC Buck Converters. Energies 2021, 14, 6848. [Google Scholar] [CrossRef]
- Argyrou, M.C.; Marouchos, C.C.; Kalogirou, S.A.; Christodoulides, P. Modeling a residential grid-connected PV system with battery–super capacitor storage: Control design and stability analysis. Energy Rep. 2021, 7, 4988–5002. [Google Scholar]
- Abdelmalek, S.; Dali, A.; Bakdi, A.; Bettayeb, M. Design and experimental implementation of a new robust observer-based nonlinear controller for DC-DC buck converters. Energy 2020, 213, 118816. [Google Scholar] [CrossRef]
- Abedi, A.; Rezaie, B.; Khosravi, A.; Shahabi, M. DC-bus voltage control based on direct Lyapunov method for a converter based stand-alone DC micro-grid. Electr. Power Syst. Res. 2020, 187, 106451. [Google Scholar] [CrossRef]
- Ding, S.; Zheng, W.; Sun, J.; Wang, J. Second-Order Sliding-Mode Controller Design and Its Implementation for Buck Converters. IEEE Trans. Ind. Inform. 2018, 14, 1990–2000. [Google Scholar] [CrossRef]
- Derbeli, M.; Charaabi, A.; Barambones, O.; Sbita, L. Optimal Energy Control of a PEM Fuel Cell/Battery Storage System. In Proceedings of the 10th International Renewable Energy Congress (IREC), Sousse, Tunisia, 26–28 March 2019; pp. 1–5. [Google Scholar]
- Utkin, V. Variable structure systems with sliding modes. IEEE Trans. Autom. Control 1977, 22, 212–222. [Google Scholar] [CrossRef]
- Mihoub, M.; Nouri, A.S.; Ben Abdennour, R. Real-time application of discrete second order sliding mode control to a chemical reactor. Control Eng. Pract. 2009, 19, 1089–1095. [Google Scholar] [CrossRef]
- Utkin, V.I. Sliding Mode in Control and Optimization; Springer: Berlin/Heidelberg, Germany, 1992. [Google Scholar]
- Levant, A. Sliding order and sliding accuracy in sliding mode control. Int. J. Control 1993, 58, 1247–1263. [Google Scholar] [CrossRef]
- Sira-Ramirez, H. Structure at infinity, zero dynamics and normal forms ofsystems undergoing sliding motion. Int. J. Syst. Sci. 1988, 21, 665–674. [Google Scholar] [CrossRef]
- Sira-Ramirez, H. Non-linear discrete variable structure systems in quasi-sliding mode. Int. J. Control 1991, 54, 1171–1187. [Google Scholar] [CrossRef]
- Flah, A.; Sbita, L. A novel IMC controller based on bacterial foraging optimization algorithm applied to a high speed range PMSM drive. Appl. Intell. 2013, 38, 114–129. [Google Scholar] [CrossRef] [Green Version]
- Zadeh, L.A. Fuzzy sets. Inf. Technol. Control 1965, 8, 338–353. [Google Scholar] [CrossRef] [Green Version]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Input voltage (v) | 400 |
| Capacitor (µF) | 5 |
| Inductor (mH) | 20 |
| Switching frequency (Khz) | 10 |
| Resistive load (Ω) | 10 |
| GN | PN | Z | PP | GP | ||
|---|---|---|---|---|---|---|
| GN | GN | GN | PN | PN | Z | |
| PN | GN | PN | PN | Z | PP | |
| Z | GN | Z | PP | GP | ||
| PP | PN | Z | PP | PP | GP | |
| GP | Z | PP | PP | GP | GP | |
| Control Algorithms | ||||||||
|---|---|---|---|---|---|---|---|---|
| Operating Modes | Values | Parameters | PI | IP | FLC | IMC | SMC | |
| Abrupt target output variation | 150 v | Response time (ms) | 9.58 | 2.62 | 1.5 | 2.8 | 0.91 | |
| Tracking error (%) | 0.013 | 0.016 | 0.13 | 0.12 | 0.003 | |||
| Overshoot (%) | 0 | 0.266 | 3.26 | 0 | 1.6 | |||
| 350 v | Response time (ms) | 8.5 | 2.6 | 2.5 | 2.8 | 2.6 | ||
| Tracking error (%) | 2.8 × 10−3 | 2.9 × 10−4 | 1.2 × 10−3 | 1.4 × 10−3 | 7.1 × 10−5 | |||
| Overshoot (%) | 4.48 | 0.17 | 1.17 | 0.014 | 0.002 | |||
| 250 v | Response time (ms) | 1.4 | 7.8 | 9.2 | 2.1 | 0.7 | ||
| Tracking error (%) | 0.33 | 0.01 | 0.04 | 0.02 | 0.001 | |||
| Voltage loss (%) | 0 | 0.11 | 0.44 | 0 | 0.8 | |||
| Triangular target output variation | 20 × 103 v/s | Tracking error (v) | 71.5 | 15 | 77 | 20 | −14.5 | |
| Abrupt input voltage variation | 400 v | Settling time | 1.92 | 9.58 | 13.4 | 2.8 | 1.3 | |
| Tracking error | 0.025 | 0.04 | 0.1 | 0.175 | 5 × 10−5 | |||
| Overshoot | 0 | 0.25 | 2 | 0 | 0.675 | |||
| 350 v | Stabilization time (ms) | 2.1 | 9.8 | 1.3 | 8 | 0 | ||
| Tracking error (%) | 2 × 10−4 | 0.001 | 0 | 0.1 | 0 | |||
| Voltage loss (%) | 2.25 | 6.65 | 8.3 | 3.55 | 0.001 | |||
| 300 v | Stabilization time (ms) | 18 | 22 | 23.8 | 10.9 | 0 | ||
| Tracking error | 0.04 | 0.01 | 0 | 0.1 | 0 | |||
| Voltage loss (%) | 3 | 8 | 9.75 | 4.25 | 0 | |||
| Abrupt load resistor variation | 15 Ω | Settling time (ms) | 2.4 | 3.24 | 13.6 | 3.7 | 0.89 | |
| Tracking error (%) | 0.1 | 1.014 | 0.2 | 0.15 | 0.05 | |||
| Overshoot (%) | 0 | 0 | 0.45 | 0.1 | 1.7 | |||
| 10 Ω | Stabilization time (ms) | 3.2 | 6.8 | 2 | 8.77 | 0.8 | ||
| Tracking error (%) | 0.15 | 0.12 | 0.13 | 0.05 | 5 × 10−5 | |||
| Overshoot (%) | 7.25 | 12.4 | 13.75 | 10.2 | 0 | |||
| Voltage loss (%) | 1.15 | 26.2 | 31.4 | 28.6 | 26.05 | |||
| 5 Ω | Settling time (ms) | 2.4 | 9.98 | 11.5 | 2.19 | 1.5 | ||
| Tracking error (%) | 0.001 | 0.006 | 0.125 | 0.025 | 0 | |||
| Overshoot (%) | 7.1 | 12.15 | 13.15 | 10.45 | 0 | |||
| Voltage loss (%) | 46.7 | 48.35 | 48.6 | 46.8 | 46.45 | |||
| Parameter variations | Abrupt capacitor variation | Stabilization time (ms) | - | - | 13.7 | 13.9 | 0 | |
| Tracking error (%) | - | - | 0.1 | 0.15 | 0 | |||
| Overshoot/Voltage loss (%) | - | - | 12.1 | 30 | 0 | |||
| Abrupt inductor variation | Stabilization time (ms) | - | - | 0.11 | 0.12 | 0 | ||
| Tracking error (%) | - | - | 5 × 10−5 | 0.05 | 0 | |||
| Overshoot/Voltage loss (%) | - | - | 0.25 | 0.23 | 5 × 10−4 | |||
| Number of controller tuning parameters | 02 | 02 | 03 | 01 | 01 | |||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hamed, S.B.; Hamed, M.B.; Sbita, L. Robust Voltage Control of a Buck DC-DC Converter: A Sliding Mode Approach. Energies 2022, 15, 6128. https://doi.org/10.3390/en15176128
Hamed SB, Hamed MB, Sbita L. Robust Voltage Control of a Buck DC-DC Converter: A Sliding Mode Approach. Energies. 2022; 15(17):6128. https://doi.org/10.3390/en15176128
Chicago/Turabian StyleHamed, Salah Beni, Mouna Ben Hamed, and Lassaad Sbita. 2022. "Robust Voltage Control of a Buck DC-DC Converter: A Sliding Mode Approach" Energies 15, no. 17: 6128. https://doi.org/10.3390/en15176128