
Implementation and Analyses of an Eco-Driving Algorithm for Different Battery Electric Powertrain Topologies Based on a Split Loss Integration Approach

Abstract
:1. Introduction
- Minimization of squared acceleration;
- “Wheel-to-distance” energy minimization;
- “Tank-to-distance” energy minimization.
1.1. Minimization of Squared Acceleration
1.2. Wheel-to-Distance Energy Minimization
1.3. Tank-to-Distance Energy Minimization
1.3.1. Optimizations Using Dynamic Programming
1.3.2. Optimizations Using Direct Methods
1.4. Review of Existing Algorithms and Scope of the Paper
- To formulate an online capable eco-driving algorithm that consistently uses losses instead of efficiencies for all relevant powertrain components in order to include the powertrain’s no-load losses at zero torque in the optimization. To fit the losses with only a small error, especially in the region at zero torque, we introduce a tailored combination of nonlinear inequality constraints.
- To formulate an eco-driving algorithm that can handle different powertrain topologies and incorporate the powertrain in a component-wise manner, so that the effect of different powertrain components, such as different motors or transmission configurations, can be addressed
- To implement a transmission loss model
- To parameterize and validate the algorithm with real-world data
2. Preliminaries on Powertrain Loss Modeling
2.1. Wheel-to-Distance Losses
2.2. Battery-to-Wheel Losses
2.2.1. Battery Losses
2.2.2. Motor and Power-Electronic Losses
2.2.3. Gearbox Losses
3. Research Method
3.1. Concept Assumptions
3.2. Proposed Eco-Driving Algorithm
3.2.1. Powertrain
3.2.2. Two Gears
3.2.3. Two Motors
3.2.4. Objective Function
3.2.5. Optimization Applications
3.2.6. Post-Processing Simulation
3.3. Experiment Design
3.3.1. Validation Experiments
3.3.2. Comparison Experiments
4. Parametrization
4.1. Parametrization of the Vehicle and Tabulated Models
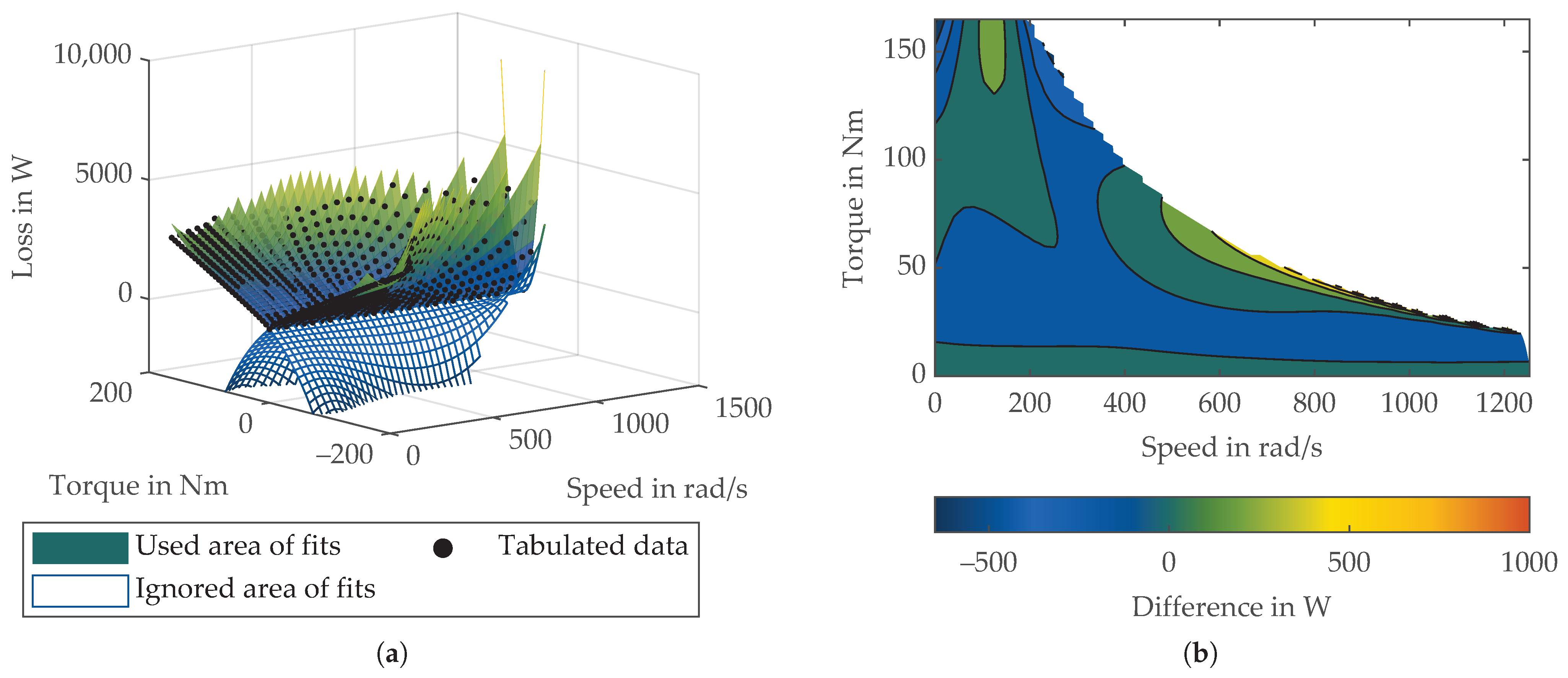
4.2. Parametrization of the Meta-Models
4.3. Additional Parametrization
5. Results and Discussion
5.1. Validation of Simulation Models
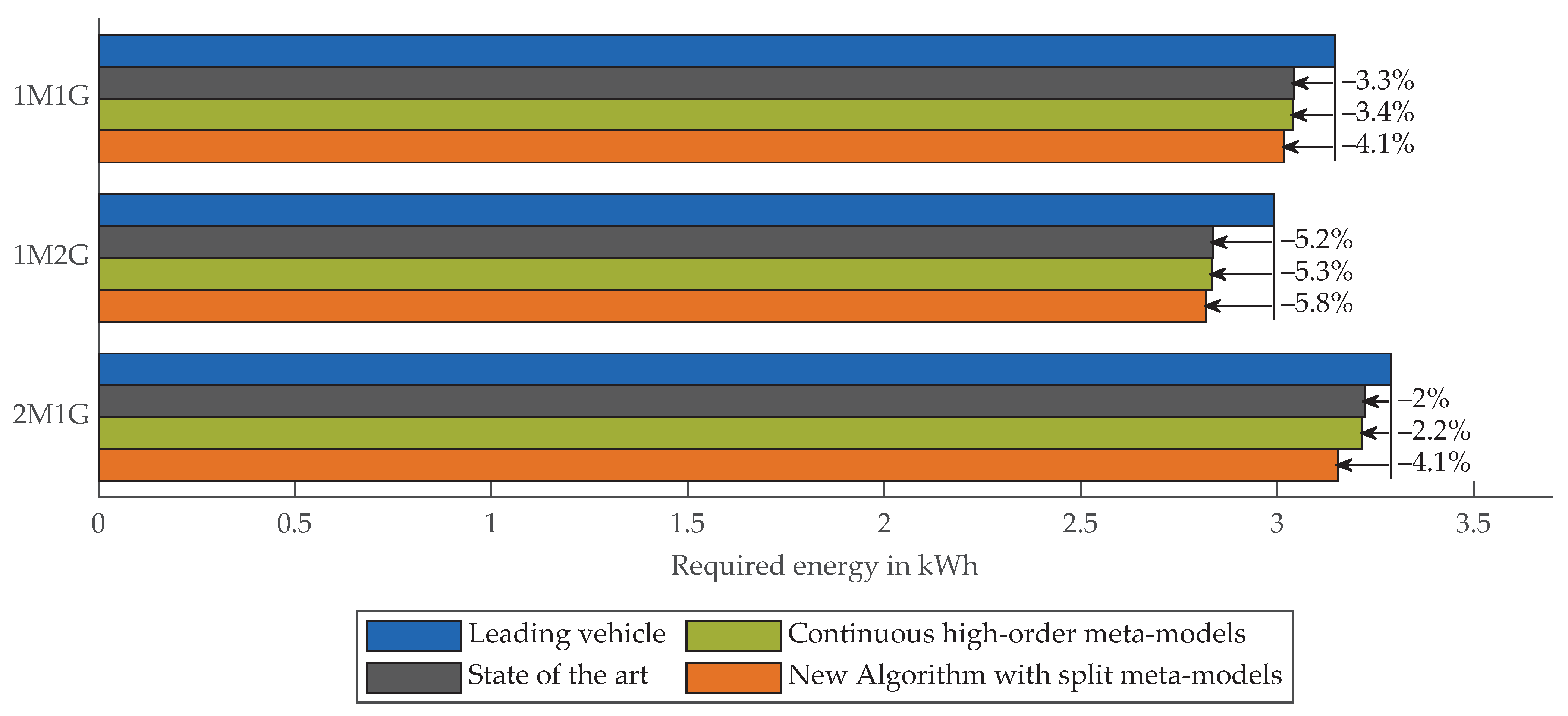
5.2. Comparison to Other Algorithms and Quality Analysis of Meta-Models
5.3. Computational Analysis
5.4. Influence of No-Load Losses, and Limitations
6. Conclusions
- Incorporated detailed losses, including battery losses, inverter losses, motor losses, transmission losses and driving losses from rolling resistance and air resistance. In contrast to other algorithms, the losses occurring when gliding under no-load are considered more accurate. This becomes important since optimal driving includes gliding.
- A method, to properly fit the losses of the motor and transmission for the optimization by using two polynomials, one for positive torque and the other for negative torque. The two polynomials are interleaved via a help variable and inequality constraints.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| 1M1G | topology with one central motor and single-speed transmission |
| 1M2G | topology with one central motor and two-speed transmission |
| 2M1G | topology with all-wheel drive based on two central motors with |
| single-speed transmission | |
| BEV | battery electric vehicle |
| CVT | continuously variable transmission |
| DP | dynamic programming |
| IM | induction motor |
| MHSP | moving horizon speed planner |
| NLP | nonlinear programming |
| OCP | optimal control problem |
| OCV | open-circuit voltage |
| P&G | Pulse and Glide |
| PMSM | permanent-magnet synchronous motor |
| RMSRE | root-mean-square relative errors |
| SOC | state of charge |
| SQP | sequential quadratic programming |
| V2V | vehicle-to-vehicle |
| WLTP | worldwide harmonized light vehicles test procedure |
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Mode | |||||||
|---|---|---|---|---|---|---|---|
| Route | 25 | 0 | 0 | 0 | 0 | 0 | |
| MHSP | 20 | 0 |
| Mode | ||||||
|---|---|---|---|---|---|---|
| Route | 2 | −3.5 | 2 | - | - | |
| MHSP | 5 | −5.5 | 3 | 1.8 | 1 | 1.5 |
| Parameter | Symbol | Value | Unit | Source |
|---|---|---|---|---|
| Vehicle parameters—1M1G | ||||
| Rolling resistance coefficient | a | 9.5 × | - | Estimated |
| Rolling resistance coefficient | b | 0 | - | Fitted |
| Rolling resistance coefficient | c | 1.717 × | - | Fitted |
| Air resistance coefficient | 0.1961 | - | Based on quadratic resistance parameter of [61] | |
| Front surface | 2.36 | m | Measured | |
| Mass vehicle + (driver) | 1820 + (150) | kg | [61] | |
| Rotating mass factor | 1.03 | - | estimated | |
| Wheel radius | 0.3468 | m | [61] | |
| Gear ratio | 11.53 | - | [61] | |
| Maximum motor torque PMSM | 309 | [61] | ||
| Radius of the rotor PMSM | 80.5 | Measured | ||
| Stack length rotor PMSM | 210 | Measured | ||
| Empirical value windage losses | 4.65 | - | Based on data of [63] | |
| Internal battery resistance | 1.857 | [61] | ||
| Battery capacity | 80.44 | [61] | ||
| Number of serial cells | 108 | - | [61] | |
| Number of parallel cells | 2 | - | [61] | |
| Default SOC | 95 | % | - | |
| Maximum braking torque | −5000 | kg/m | estimated | |
| Default auxiliary power | 300 | estimated | ||
| Environment parameters | ||||
| Air density | 1.18 | kg/m | estimated | |
| Acceleration due to gravity | g | 9.81 | / | - |
| Additional vehicle parameters—1M2G | ||||
| Additional vehicle mass | 25 | kg | estimated | |
| Gear ratio second gear | 3 | - | - | |
| Additional vehicle parameters—2M1G | ||||
| Additional vehicle mass | 80 | kg | estimated | |
| Gear ratio second motor | 8 | - | - | |
| Maximal motor torque IM | 165 | Nm | [65] | |





References
- Koenig, A.; Schockenhoff, F.; Koch, A.; Lienkamp, M. Concept Design Optimization of Autonomous and Electric Vehicles. In Proceedings of the 8th International Conference on Power Science and Engineering (ICPSE), Dublin, Ireland, 2–4 December 2019; pp. 44–49. [Google Scholar] [CrossRef]
- Talebpour, A.; Mahmassani, H.S. Influence of connected and autonomous vehicles on traffic flow stability and throughput. Transp. Res. Part C Emerg. Technol. 2016, 71, 143–163. [Google Scholar] [CrossRef]
- Stern, R.E.; Cui, S.; Delle Monache, M.L.; Bhadani, R.; Bunting, M.; Churchill, M.; Hamilton, N.; Pohlmann, H.; Wu, F.; Piccoli, B.; et al. Dissipation of stop-and-go waves via control of autonomous vehicles: Field experiments. Transp. Res. Part C Emerg. Technol. 2018, 89, 205–221. [Google Scholar] [CrossRef] [Green Version]
- Sciarretta, A. Energy-Efficient Driving of Road Vehicles: Toward a Cooperative, Connected, and Automated Mobility; Springer: Cham, Switzerland, 2019. [Google Scholar] [CrossRef]
- Christian, A. Antriebskonzept-Optimierung für Batterieelektrische Allradfahrzeuge. Ph.D. Thesis, Technische Universität München, Munich, Germany, 2020. [Google Scholar]
- Vaillant, M. Design Space Exploration zur Multikriteriellen Optimierung Elektrischer Sportwagenantriebsstränge; Karlsruher Institut für Technologie: Karlsruhe, Germany, 2015. [Google Scholar] [CrossRef]
- Weiß, F. Optimale Konzeptauslegung elektrifizierter Fahrzeugantriebsstränge; Springer: Wiesbaden, Germany, 2018. [Google Scholar] [CrossRef]
- Verbruggen, F.; Salazar, M.; Pavone, M.; Hofman, T. Joint Design and Control of Electric Vehicle Propulsion Systems. In Proceedings of the 2020 European Control Conference (ECC), St. Petersburg, Russia, 12–15 May 2020; pp. 1725–1731. [Google Scholar] [CrossRef]
- Wei, C.; Hofman, T.; Ilhan Caarls, E. Co-Design of CVT-Based Electric Vehicles. Energies 2021, 14, 1825. [Google Scholar] [CrossRef]
- Koch, A.; Bürchner, T.; Herrmann, T.; Lienkamp, M. Eco-Driving for Different Electric Powertrain Topologies Considering Motor Efficiency. World Electr. Veh. J. 2021, 12, 6. [Google Scholar] [CrossRef]
- Anselma, P.G.; Belingardi, G. Enhancing Energy Saving Opportunities through Rightsizing of a Battery Electric Vehicle Powertrain for Optimal Cooperative Driving. SAE Int. J. Connect. Autom. Veh. 2020, 3. [Google Scholar] [CrossRef]
- Gambhira, U.R. Powertrain Optimization of an Autonomous Electric Vehicle. Master’s Thesis, The Ohio State University, Columbus, OH, USA, 2018. [Google Scholar]
- Borsboom, O.; Fahdzyana, C.A.; Hofman, T.; Salazar, M. A Convex Optimization Framework for Minimum Lap Time Design and Control of Electric Race Cars. IEEE Trans. Veh. Technol. 2021, 70, 8478–8489. [Google Scholar] [CrossRef]
- Huang, Y.; Ng, E.C.Y.; Zhou, J.L.; Surawski, N.C.; Chan, E.F.C.; Hong, G. Eco-driving technology for sustainable road transport: A review. Renew. Sustain. Energy Rev. 2018, 93, 596–609. [Google Scholar] [CrossRef]
- Fafoutellis, P.; Mantouka, E.G.; Vlahogianni, E.I. Eco-Driving and Its Impacts on Fuel Efficiency: An Overview of Technologies and Data-Driven Methods. Sustainability 2021, 13, 226. [Google Scholar] [CrossRef]
- Han, J.; Vahidi, A.; Sciarretta, A. Fundamentals of energy efficient driving for combustion engine and electric vehicles: An optimal control perspective. Automatica 2019, 103, 558–572. [Google Scholar] [CrossRef]
- So, K.M.; Gruber, P.; Tavernini, D.; Karci, A.E.H.; Sorniotti, A.; Motaln, T. On the Optimal Speed Profile for Electric Vehicles. IEEE Access 2020, 8, 78504–78518. [Google Scholar] [CrossRef]
- Koch, A.; Teichert, O.; Kalt, S.; Ongel, A.; Lienkamp, M. Powertrain Optimization for Electric Buses under Optimal Energy-Efficient Driving. Energies 2020, 13, 6451. [Google Scholar] [CrossRef]
- Zhang, C.; Vahidi, A. Predictive cruise control with probabilistic constraints for eco driving. In Proceedings of the Dynamic Systems and Control Conference, Arlington, VI, USA, 31 October 31–2 November 2011; Volume 54761, pp. 233–238. [Google Scholar] [CrossRef]
- Dollar, R.A.; Vahidi, A. Quantifying the impact of limited information and control robustness on connected automated platoons. In Proceedings of the 2017 IEEE 20th International Conference on Intelligent Transportation Systems (ITSC), Yokohama, Japan, 16–19 October 2017; pp. 1–7. [Google Scholar] [CrossRef]
- Dollar, R.A.; Vahidi, A. Efficient and collision-free anticipative cruise control in randomly mixed strings. IEEE Trans. Intell. Veh. 2018, 3, 439–452. [Google Scholar] [CrossRef]
- Lin, X.; Görges, D.; Weißmann, A. Simplified Energy-Efficient Adaptive Cruise Control based on Model Predictive Control. IFAC-PapersOnLine 2017, 50, 4794–4799. [Google Scholar] [CrossRef]
- Diehl, M.; Bock, H.G.; Diedam, H.; Wieber, P.B. Fast direct multiple shooting algorithms for optimal robot control. In Fast Motions in Biomechanics and Robotics; Springer: Berlin/Heidelberg, Germany, 2006; pp. 65–93. [Google Scholar]
- Rao, A. A Survey of Numerical Methods for Optimal Control. Adv. Astronaut. Sci. 2010, 135. Available online: https://www.researchgate.net/publication/268042868_A_Survey_of_Numerical_Methods_for_Optimal_Control (accessed on 6 July 2022).
- Lin, X.; Gorges, D.; Liu, S. Eco-driving assistance system for electric vehicles based on speed profile optimization. In Proceedings of the 2014 IEEE Conference on Control Applications (CCA), Juan Les Antibes, France, 8–10 October 2014; pp. 629–634. [Google Scholar] [CrossRef]
- Lajunen, A. Energy-optimal velocity profiles for electric city buses. In Proceedings of the 2013 IEEE International Conference on Automation Science and Engineering (CASE), Madison, WI, USA, 17–20 August 2013; pp. 886–891. [Google Scholar] [CrossRef]
- Franke, R.; Terwiesch, P.; Meyer, M. An algorithm for the optimal control of the driving of trains. In Proceedings of the 39th IEEE Conference on Decision and Control (Cat. No.00CH37187), Sydney, NSW, Australia, 12–15 December 2000; pp. 2123–2128. [Google Scholar] [CrossRef]
- Liao, P.; Tang, T.Q.; Liu, R.; Huang, H.J. An eco-driving strategy for electric vehicle based on the powertrain. Appl. Energy 2021, 302, 117583. [Google Scholar] [CrossRef]
- Shao, Y. Optimization and Evaluation Of Vehicle Dynamics and Powertrain Operation For Connected and Autonomous Vehicles. Ph.D. Thesis, University of Minnesota Digital Conservancy, Minneapolis, MN, USA, 2019. [Google Scholar]
- Wächter, A.; Biegler, L.T. On the implementation of an interior-point filter line-search algorithm for large-scale nonlinear programming. Math. Program. 2006, 106, 25–57. [Google Scholar] [CrossRef]
- Jia, Y.; Jibrin, R.; Gorges, D. Energy-Optimal Adaptive Cruise Control for Electric Vehicles Based on Linear and Nonlinear Model Predictive Control. IEEE Trans. Veh. Technol. 2020, 69, 14173–14187. [Google Scholar] [CrossRef]
- Bertoni, L.; Guanetti, J.; Basso, M.; Masoero, M.; Cetinkunt, S.; Borrelli, F. An adaptive cruise control for connected energy-saving electric vehicles. IFAC-PapersOnLine 2017, 50, 2359–2364. [Google Scholar] [CrossRef]
- Hucho, W.H. Aerodynamics of road vehicles. SAE Int. 1986, 295–354. [Google Scholar] [CrossRef]
- Schwickart, T.; Voos, H.; Hadji-Minaglou, J.R.; Darouach, M.; Rosich, A. Design and simulation of a real-time implementable energy-efficient model-predictive cruise controller for electric vehicles. J. Frankl. Inst. 2015, 352, 603–625. [Google Scholar] [CrossRef]
- He, H.; Liu, D.; Lu, X.; Xu, J. ECO Driving Control for Intelligent Electric Vehicle with Real-Time Energy. Electronics 2021, 10, 2613. [Google Scholar] [CrossRef]
- Guzzella, L.; Sciarretta, A. Vehicle Propulsion Systems: Introduction to Modeling and Optimization, 3rd ed.; Springer: Berlin/Heidelberg, Germany, 2013. [Google Scholar] [CrossRef]
- Braess, H.H.; Seiffert, U. (Eds.) Vieweg Handbuch Kraftfahrzeugtechnik, 7 aktualisierte auflage ed.; ATZ/MTZ-Fachbuch; Springer: Wiesbaden, Germany, 2013. [Google Scholar] [CrossRef]
- Highway Tire Committee. Stepwise Coastdown Methodology for Measuring Tire Rolling Resistance. [CrossRef]
- Hall, D.E.; Moreland, J.C. Fundamentals of Rolling Resistance. Rubber Chem. Technol. 2001, 74, 525–539. [Google Scholar] [CrossRef]
- Ficht, A.; Lienkamp, M. Rolling resistance modeling for electric vehicle consumption. In 6th International Munich Chassis Symposium 2015; Pfeffer, P., Ed.; Springer: Wiesbaden, Germany, 2015; pp. 775–798. [Google Scholar] [CrossRef]
- Ejsmont, J.; Taryma, S.; Ronowski, G.; Swieczko-Zurek, B. Influence of temperature on the tyre rolling resistance. Int. J. Automot. Technol. 2018, 19, 45–54. [Google Scholar] [CrossRef]
- Mitschke, M.; Wallentowitz, H. Dynamik der Kraftfahrzeuge; Springer: Wiesbaden, Germany, 2014. [Google Scholar] [CrossRef]
- Steinstraeter, M.; Heinrich, T.; Lienkamp, M. Effect of Low Temperature on Electric Vehicle Range. World Electr. Veh. J. 2021, 12, 115. [Google Scholar] [CrossRef]
- Fotouhi, A.; Auger, D.J.; Propp, K.; Longo, S.; Wild, M. A review on electric vehicle battery modelling: From Lithium-ion toward Lithium–Sulphur. Renew. Sustain. Energy Rev. 2016, 56, 1008–1021. [Google Scholar] [CrossRef] [Green Version]
- Chang, F.; Ilina, O.; Lienkamp, M.; Voss, L. Improving the Overall Efficiency of Automotive Inverters Using a Multilevel Converter Composed of Low Voltage Si mosfets. IEEE Trans. Power Electron. 2019, 34, 3586–3602. [Google Scholar] [CrossRef]
- Xu, Y.; Gu, J.; Chen, H.; Chen, Z.; Pu, Y. Power loss calculation for the power converter in switched reluctance motor drive. In Proceedings of the 2014 IEEE International Conference on Information and Automation (ICIA), Hailar, China, 28–30 July 2014; pp. 19–24. [Google Scholar] [CrossRef]
- Jenni, F.; Wüest, D. Steuerverfahren für selbstgeführte Stromrichter; Verlag an der ETH Zürich: Zürich, Switzerland, 1995. [Google Scholar] [CrossRef]
- Binder, A. Elektrische Maschinen und Antriebe; Springer: Berlin/Heidelberg, Germany, 2017. [Google Scholar] [CrossRef]
- Müller, G.; Ponick, B. Grundlagen Elektrischer Maschinen, 10 wesentlich überarbeitete und erweiterte auflage ed.; Elektrische Maschinen/Germar Müller und Bernd Ponick; Wiley-VCH Verlag GmbH & Co. KGaA: Weinheim, Germany, 2014; Volume 1. [Google Scholar]
- Mahmoudi, A.; Soong, W.L.; Pellegrino, G.; Armando, E. Loss Function Modeling of Efficiency Maps of Electrical Machines. IEEE Trans. Ind. Appl. 2017, 53, 4221–4231. [Google Scholar] [CrossRef] [Green Version]
- Ruuskanen, V.; Nerg, J.; Rilla, M.; Pyrhonen, J. Iron Loss Analysis of the Permanent-Magnet Synchronous Machine Based on Finite-Element Analysis Over the Electrical Vehicle Drive Cycle. IEEE Trans. Ind. Electron. 2016, 63, 4129–4136. [Google Scholar] [CrossRef]
- Niemann, G.; Winter, H. Maschinenelemente: Band 2: Getriebe Allgemein, Zahnradgetriebe—Grundlagen, Stirnradgetriebe; Niemann, G., Winter, H., Eds.; Springer: Berlin/Heidelberg, Gernmany, 2003. [Google Scholar]
- Pahl, G.; Müller, H.W. Die Umlaufgetriebe; Springer: Berlin/Heidelberg, Germany, 1998; Volume 28. [Google Scholar] [CrossRef]
- Walter, P. Anwendungsgrenzen für die Tauchschmierung von Zahnradgetrieben, Plansch- und Quetschverluste bei Tauchschmierung: Forschungsvorhaben Nr. 44/I; Abschlußbericht; Forschungsvereinigung Antriebstechnik: Forschungsheft, Germany, 1982. [Google Scholar]
- SKF. Rolling Bearings|SKF. 2021. Available online: https://www.skf.com/group/products/rolling-bearings (accessed on 15 November 2021).
- Schaeffler Technologies AG & Co. KG. Rolling Bearings: Ball bearings, Roller Bearings, Needle Roller Bearings, Track Rollers, Bearings for Screw Drives, Insert Bearings/Housing Units, Bearing Housings, Accessories. 2019. Available online: https://www.schaeffler.de/content.schaeffler.de/de/news_medien/mediathek/publikationen/downloadcenter-global-pages/downloadcenter-language-list-publications.jsp?pubid=246581&ppubid=246579&tab=mediathek-pub&uid=386195&subfilter=app:dc (accessed on 6 February 2021).
- Wolf, T.M. The Rolling Bearing in the Electrified Power Train—Requirements and Solutions. In CTI SYMPOSIUM 2019; Springer: Berlin/Heidelberg, Gernmany, 2021; pp. 575–583. [Google Scholar] [CrossRef]
- ISO 14179. Gears—Thermal Capacity—Part 2: Thermal Load-Carrying Capacity. International Organization for Standardization: Geneva, Switzerland, 2001. [Google Scholar]
- Marler, R.T.; Arora, J.S. The weighted sum method for multi-objective optimization: New insights. Struct. Multidiscip. Optim. 2010, 41, 853–862. [Google Scholar] [CrossRef]
- Andersson, J.A.E.; Gillis, J.; Horn, G.; Rawlings, J.B.; Diehl, M. CasADi—A software framework for nonlinear optimization and optimal control. Math. Program. Comput. 2019, 11, 1–36. [Google Scholar] [CrossRef]
- Wassiliadis, N.; Steinsträter, M.; Schreiber, M.; Rosner, P.; Nicoletti, L.; Schmid, F.; Ank, M.; Teichert, O.; Wildfeuer, L.; Schneider, J.; et al. Quantifying the state of the art of electric powertrains in battery electric vehicles: Range, efficiency, and lifetime from component to system level of the Volkswagen ID.3. eTransportation 2022, 12, 100167. [Google Scholar] [CrossRef]
- Paar, C.; Muetze, A.; Kolbe, H. Influence of Machine Integration on the Thermal Behavior of a PM Drive for Hybrid Electric Traction. IEEE Trans. Ind. Appl. 2015, 51, 3914–3922. [Google Scholar] [CrossRef]
- Kiyota, K.; Kakishima, T.; Chiba, A. Estimation and comparison of the windage loss of a 60 kW Switched Reluctance Motor for hybrid electric vehicles. In Proceedings of the 2014 International Power Electronics Conference (IPEC-Hiroshima 2014—ECCE ASIA), Hiroshima, Japan, 18–21 May 2014; pp. 3513–3518. [Google Scholar] [CrossRef]
- Nicoletti, L.; Köhler, P.; König, A.; Heinrich, M.; Lienkamp, M. Parametric Modeling of Weight and Volume Effects on Battery Electric Vehicles, with Focus on the Gearbox. Proc. Des. Soc. 2021, 1, 2389–2398. [Google Scholar] [CrossRef]
- Kalt, S.; Erhard, J.; Lienkamp, M. Electric Machine Design Tool for Permanent Magnet Synchronous Machines and Induction Machines. Machines 2020, 8, 15. [Google Scholar] [CrossRef] [Green Version]
- Mersky, A.C.; Samaras, C. Fuel economy testing of autonomous vehicles. Transp. Res. Part C Emerg. Technol. 2016, 65, 31–48. [Google Scholar] [CrossRef]









| Function | Component | m | n | RMSRE |
|---|---|---|---|---|
| / | PMSM | 5 | 3 | 0.079 |
| / | IM | 5 | 3 | 0.067 |
| / | Gearbox PMSM | 2 | 3 | 0.025 |
| / | Gearbox IM | 2 | 3 | 0.025 |
| Battery | 1 | 0 | 0.013 |
| Function | Component | m | n | RMSRE |
|---|---|---|---|---|
| PMSM+Gearbox | 2 | 2 | 0.555 | |
| IM+Gearbox | 2 | 2 | 0.682 |
| Function | Component | m | n | RMSRE |
|---|---|---|---|---|
| PMSM | 5 | 6 | 0.202 | |
| IM | 5 | 6 | 0.293 | |
| Gearbox PMSM | 2 | 6 | 0.137 | |
| Gearbox IM | 2 | 6 | 0.123 |
| Cycle | WLTP | Urban-Cycle | Intercity-Cycle | Highway-Cycle |
|---|---|---|---|---|
| Derivations in % | −1.6% | −0.1% | −3.1% | 1.1% |
| 1M1G | 1M2G | 2M1G | |
|---|---|---|---|
| Horizon 6 | ( ) | 58 | |
| Horizon 10 | ( ) | ||
| Horizon 16 | ( ) | 148 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Koch, A.; Nicoletti, L.; Herrmann, T.; Lienkamp, M. Implementation and Analyses of an Eco-Driving Algorithm for Different Battery Electric Powertrain Topologies Based on a Split Loss Integration Approach. Energies 2022, 15, 5396. https://doi.org/10.3390/en15155396
Koch A, Nicoletti L, Herrmann T, Lienkamp M. Implementation and Analyses of an Eco-Driving Algorithm for Different Battery Electric Powertrain Topologies Based on a Split Loss Integration Approach. Energies. 2022; 15(15):5396. https://doi.org/10.3390/en15155396
Chicago/Turabian StyleKoch, Alexander, Lorenzo Nicoletti, Thomas Herrmann, and Markus Lienkamp. 2022. "Implementation and Analyses of an Eco-Driving Algorithm for Different Battery Electric Powertrain Topologies Based on a Split Loss Integration Approach" Energies 15, no. 15: 5396. https://doi.org/10.3390/en15155396