
Dynamic Characteristics and Demonstration of an Integrated Linear Engine Generator with Alternative Electrical Machines

 ,
,  , , and
, , and
Abstract
:
1. Introduction
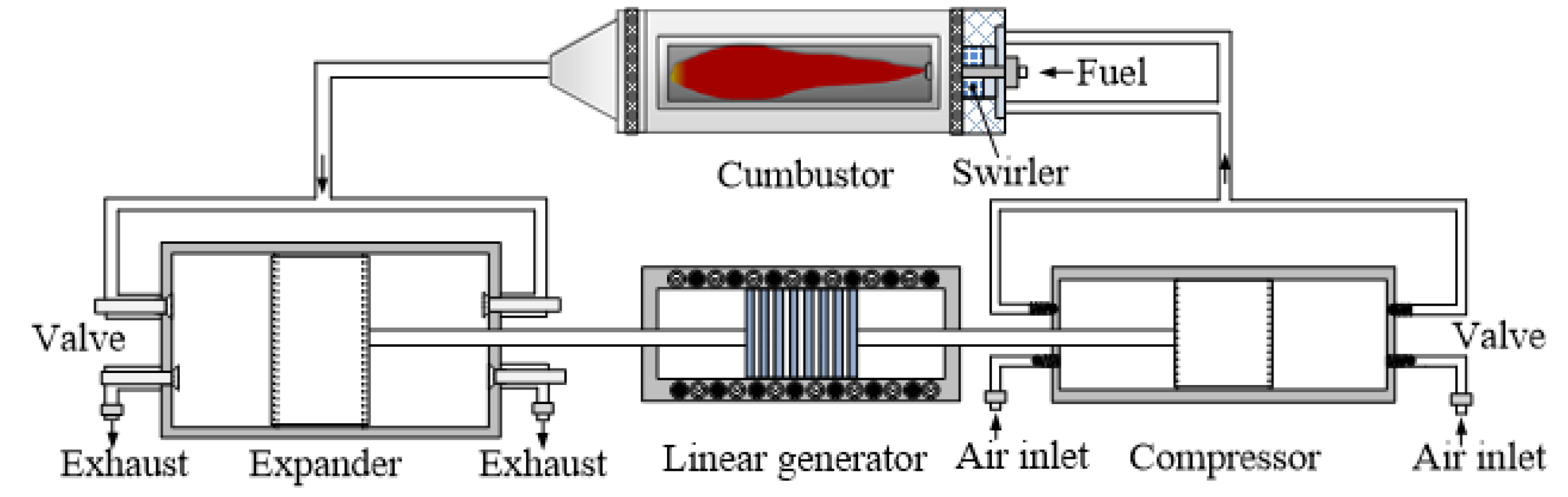
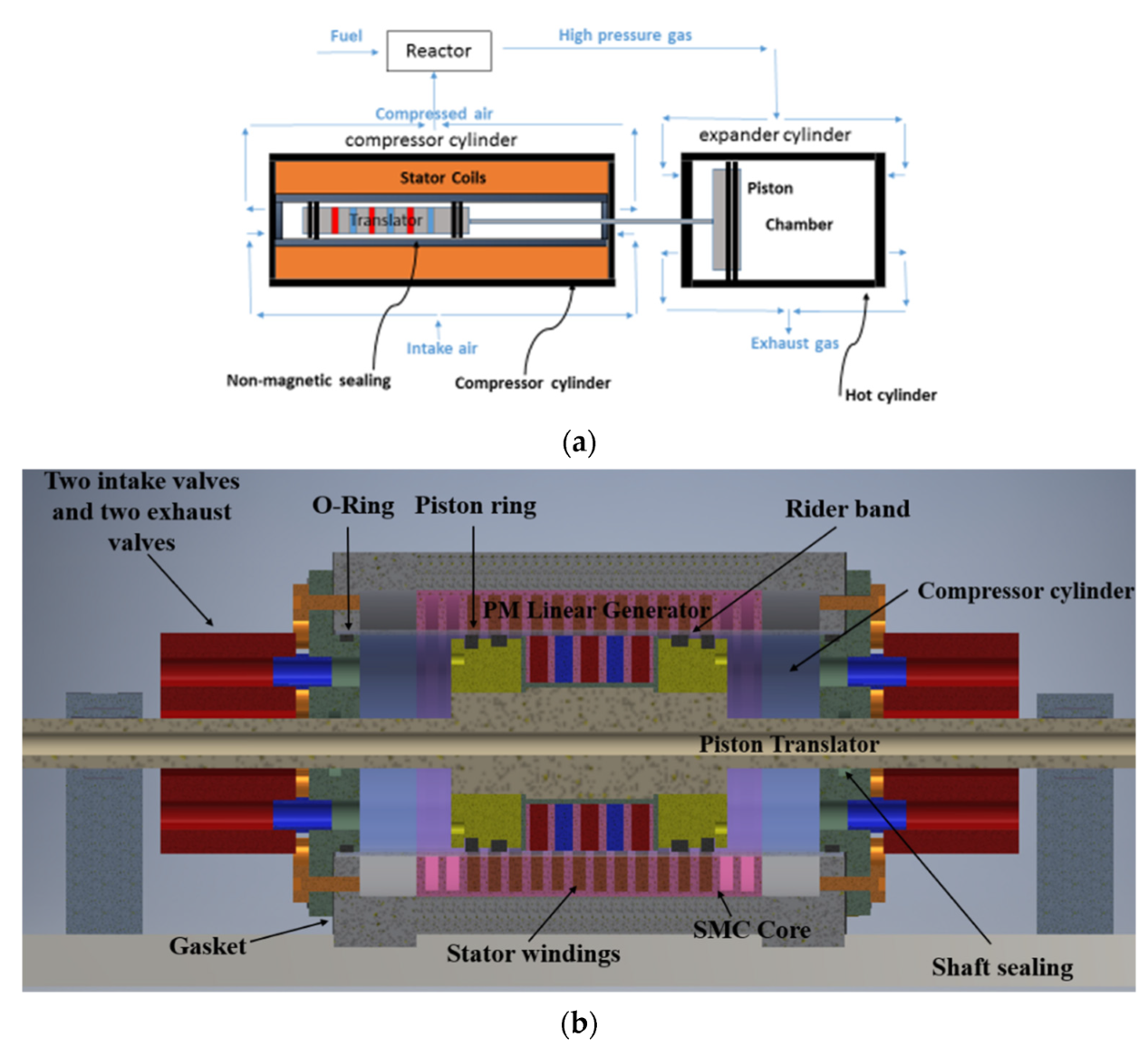
2. Linear Engine Generator Development
3. A Coupled Dynamic Model of the LEG System
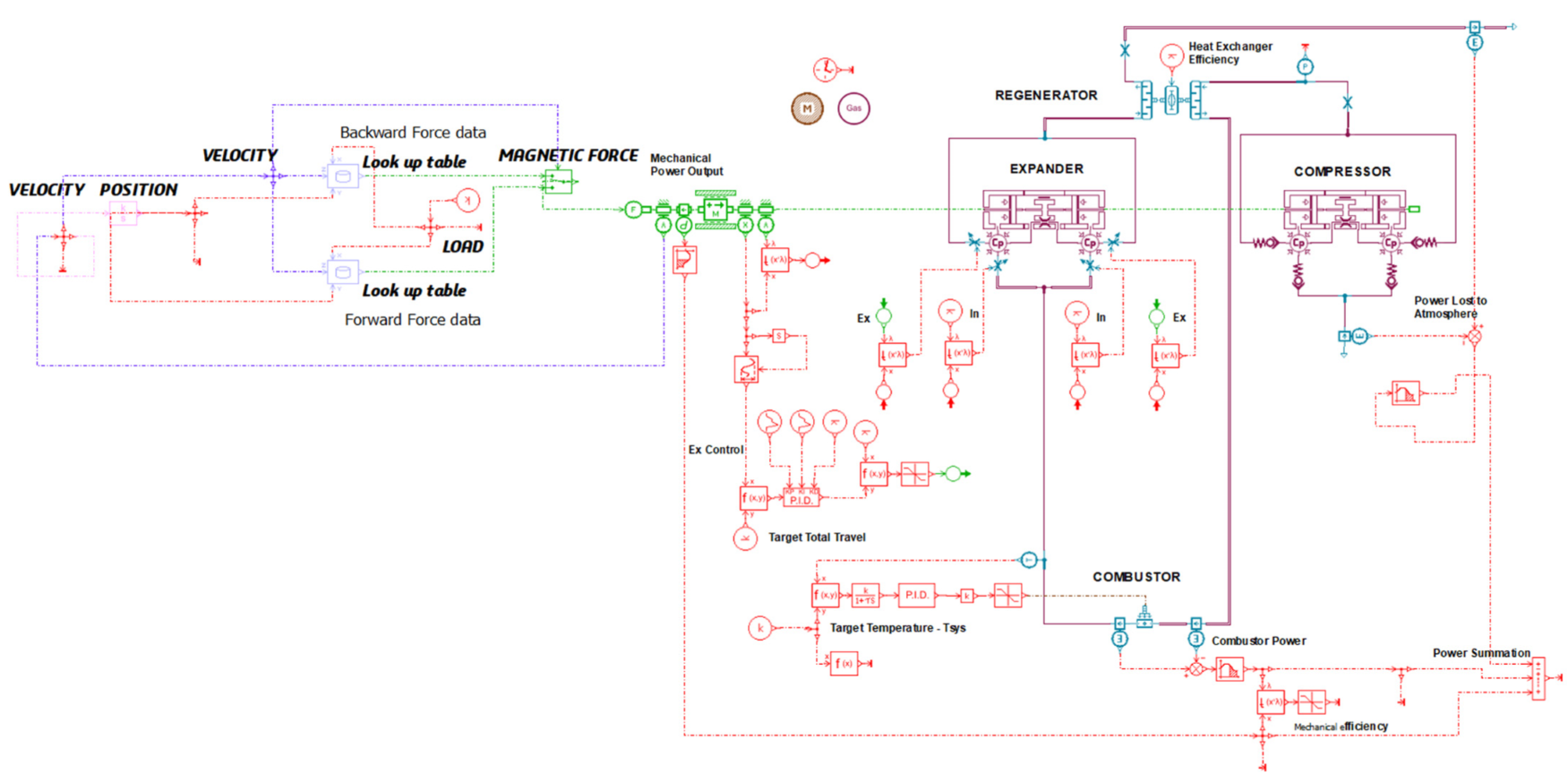
3.1. Model Structure and Simulation Implementation
3.2. Linear Engine Sub-Model
3.3. Generator Sub-Model
3.4. Input Parameters of the Coupled Model
4. Model Validation and Performance Prediction
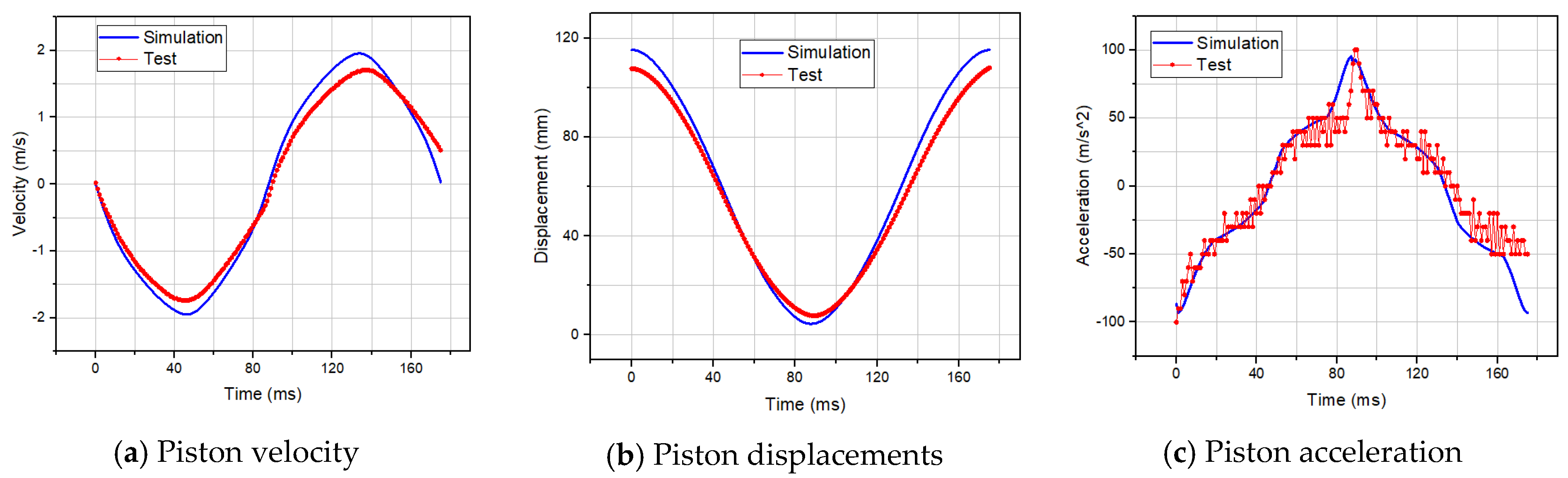
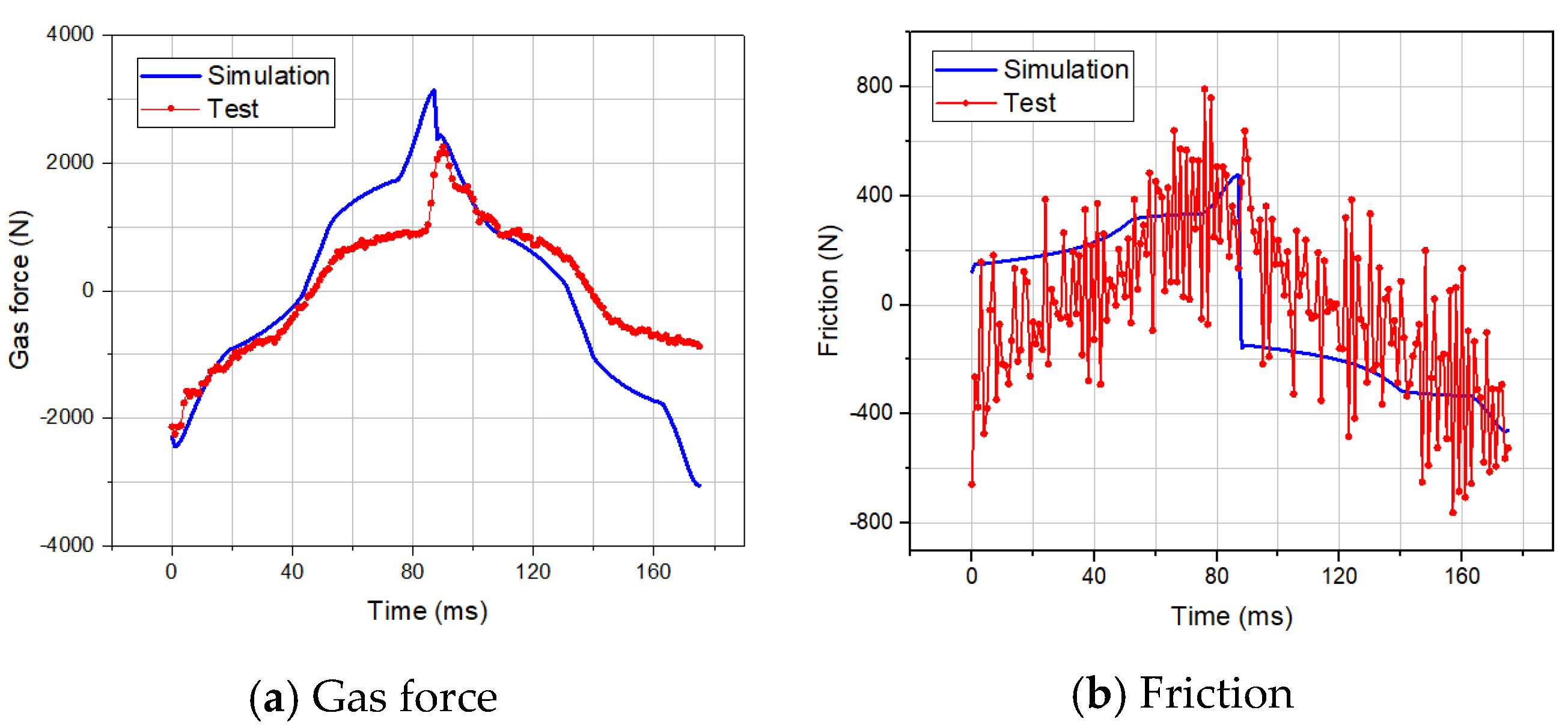
4.1. Linear Engine Sub-Model Validation
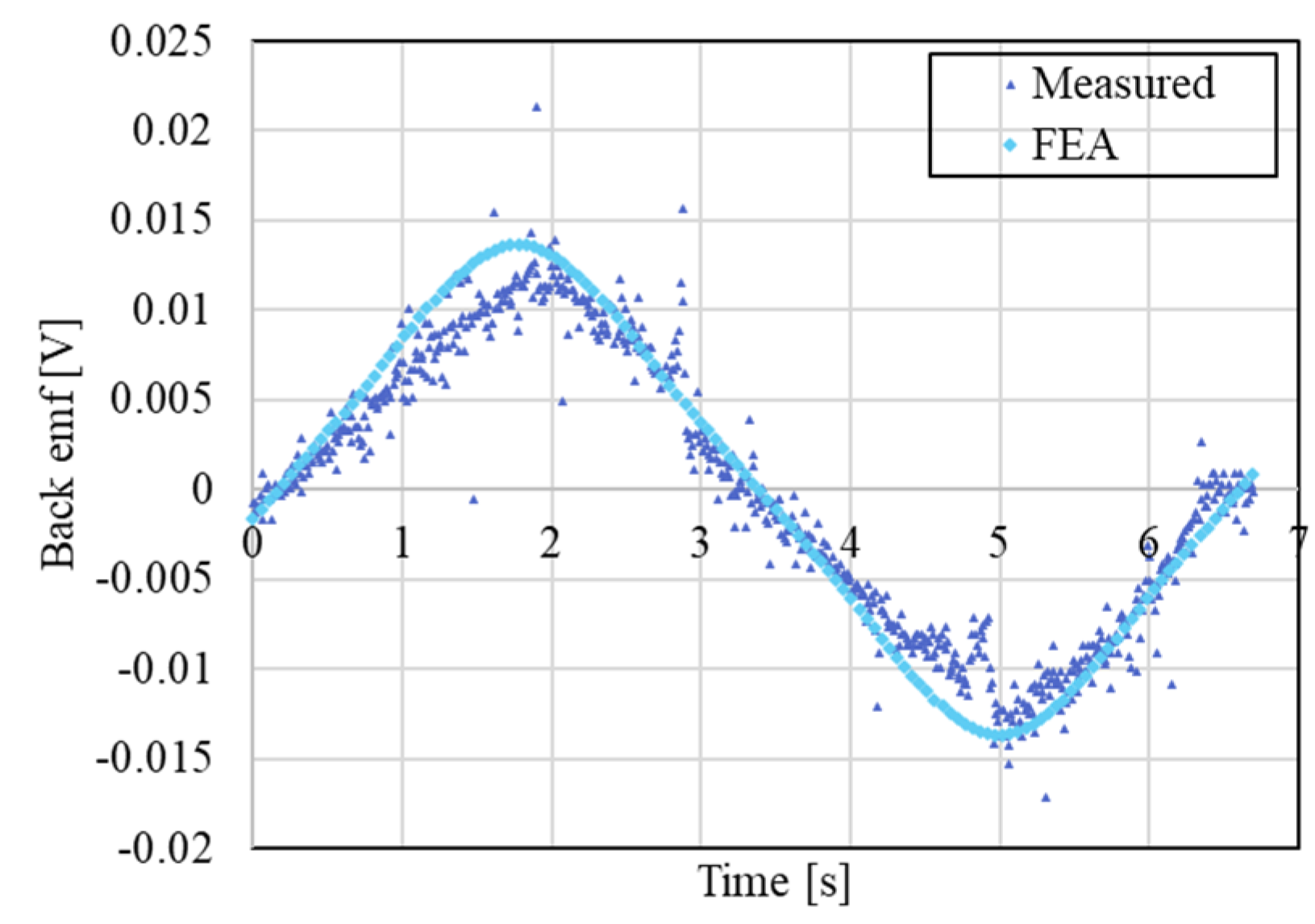
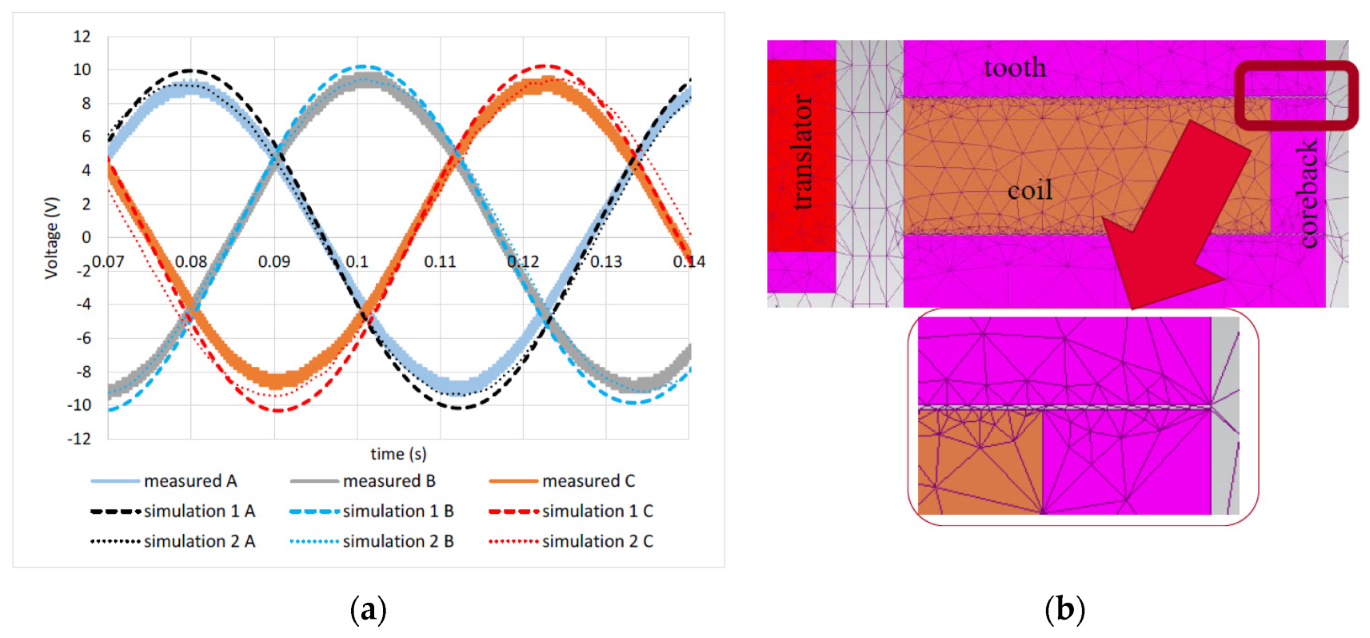
4.2. PM LSM Sub-Model Validation
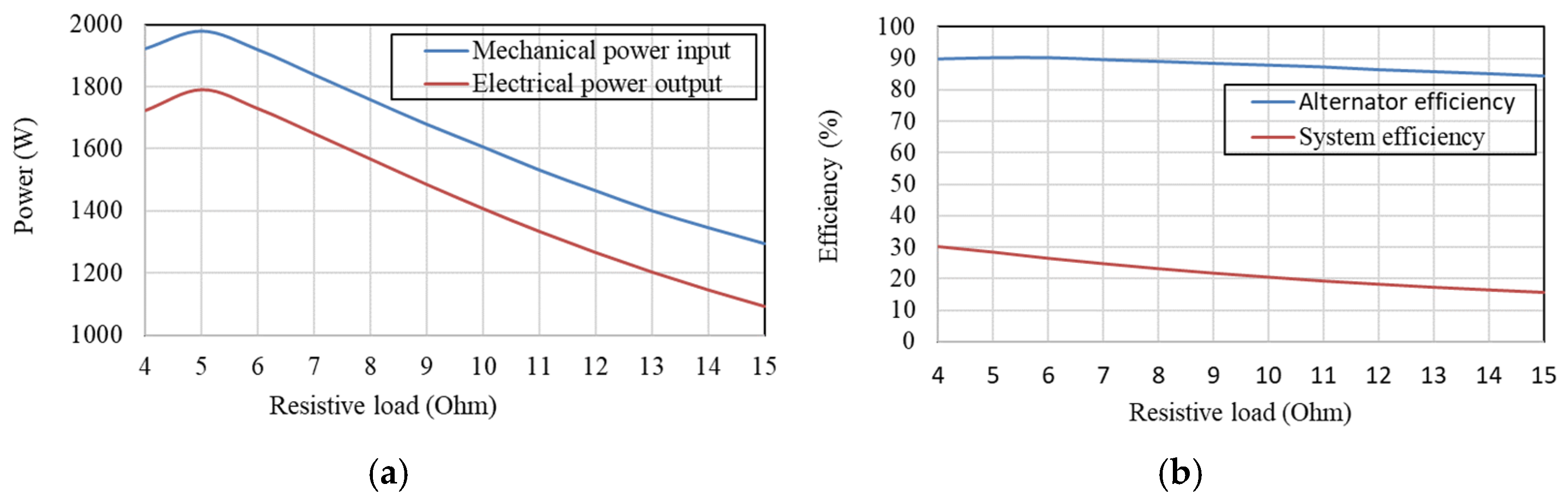
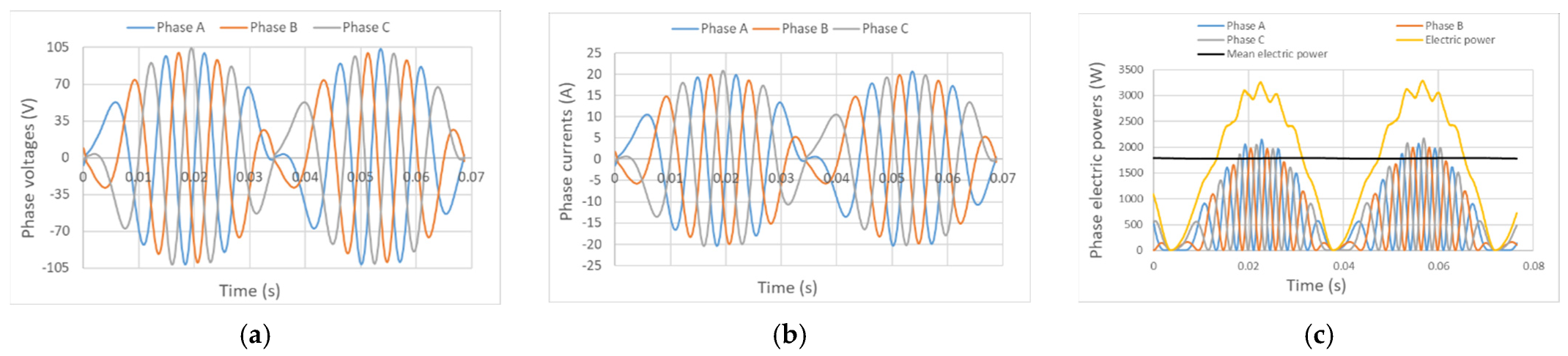
4.3. Performance Prediction of the LEG System with Long Translator Generator (Model ‘A’)
5. Results and Discussion
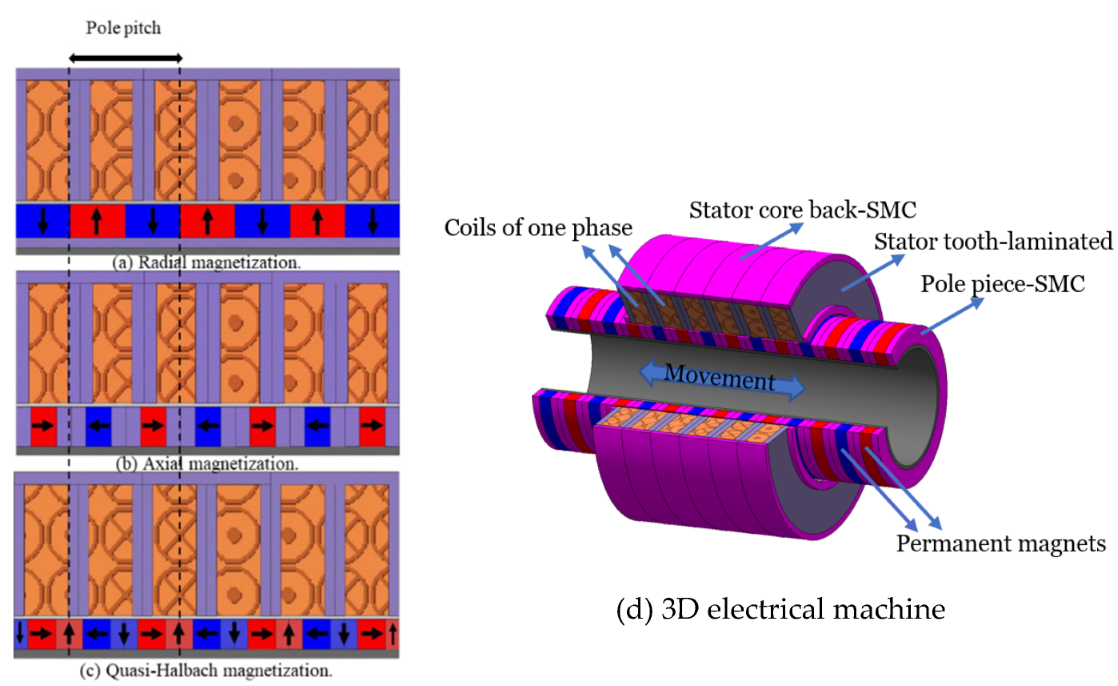
5.1. Alternative Topologies of PM Generator-MagNet FEA Analysis
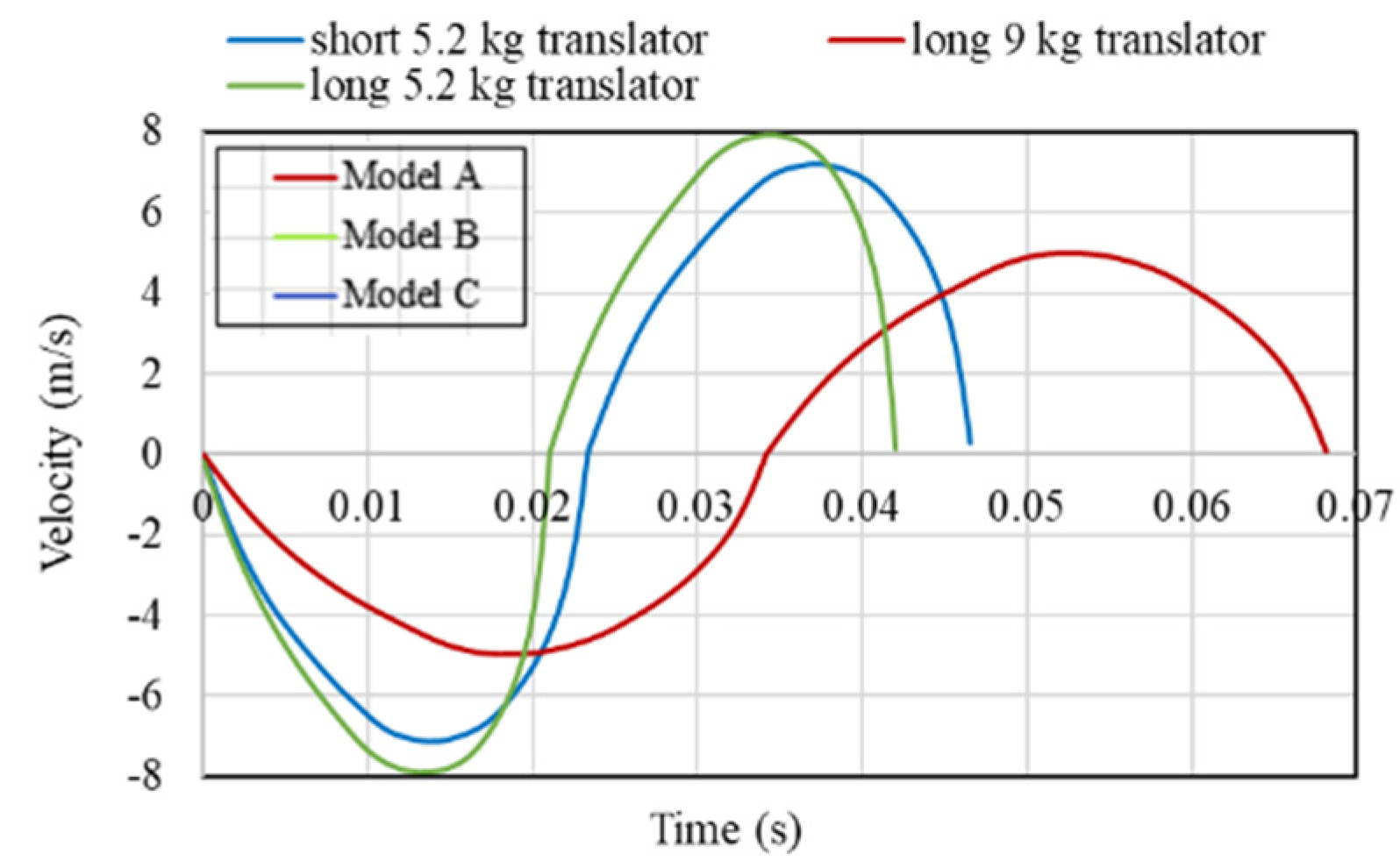
5.2. The Linear Engine Spontaneous Response to Alternative Topologies of PM Generator
5.3. The LEG Performance Comparison
5.3.1. Energy Inputs and Outputs
5.3.2. Energy Density Comparison
6. Discussion on System Integration
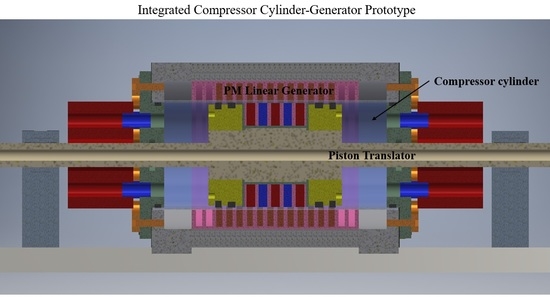
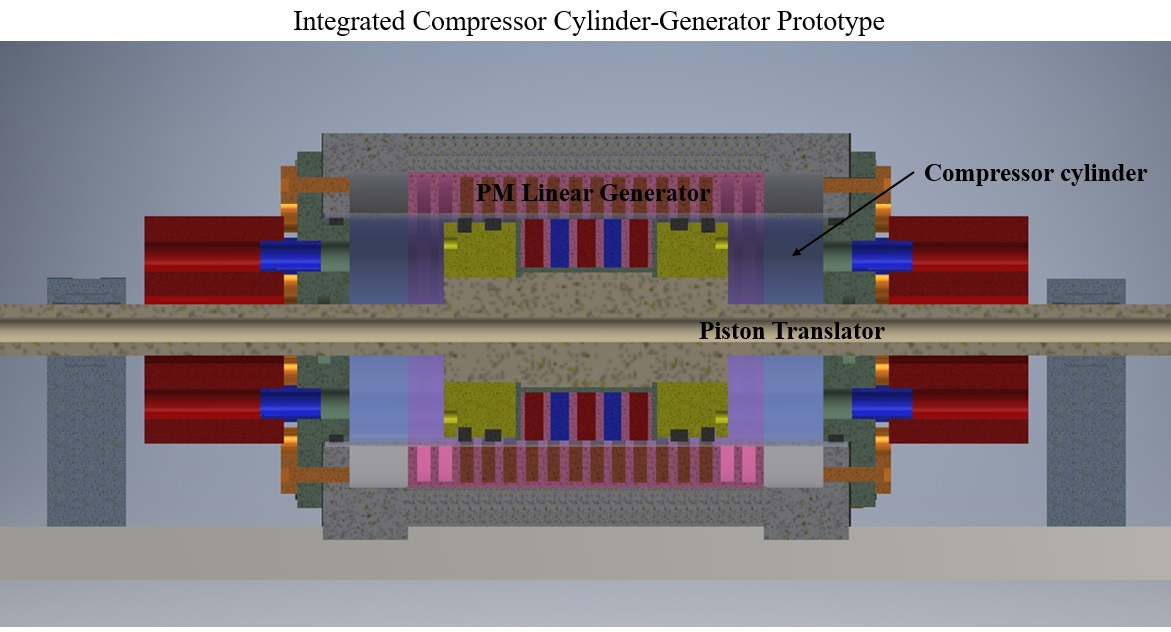
6.1. Proposed Integrated Prototype
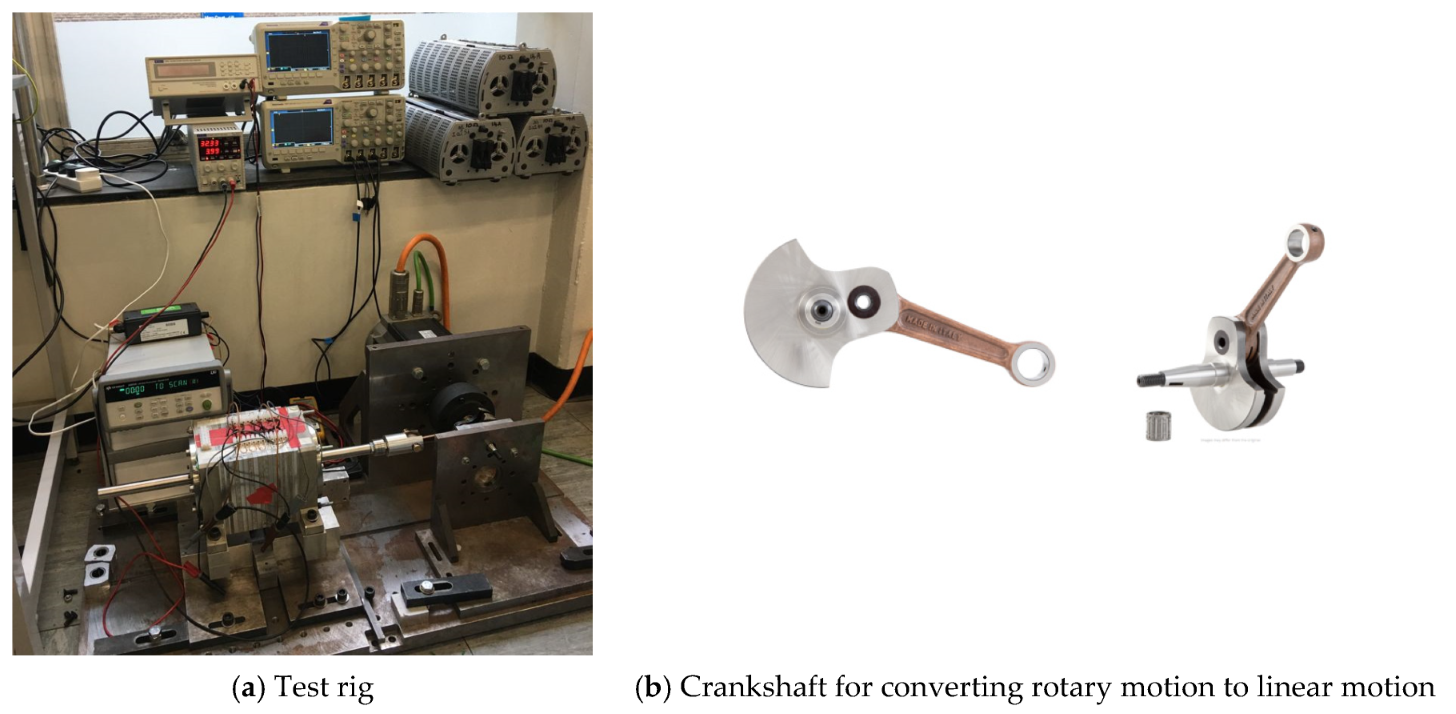
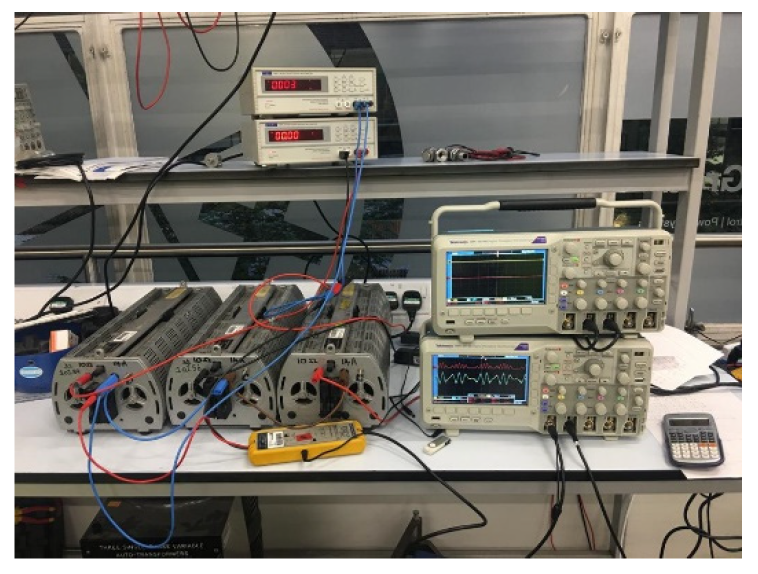
6.2. Prototype Testing
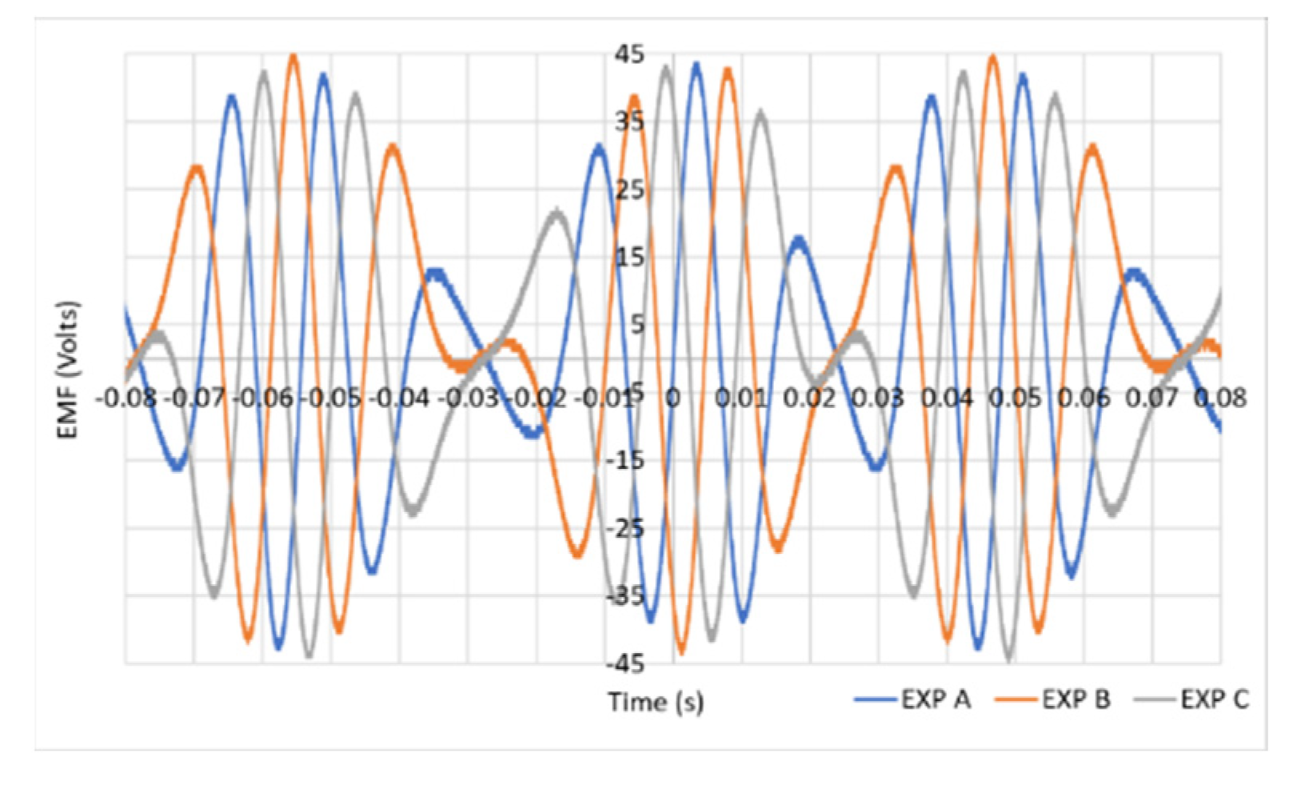
6.2.1. No-Load Electrical Testing
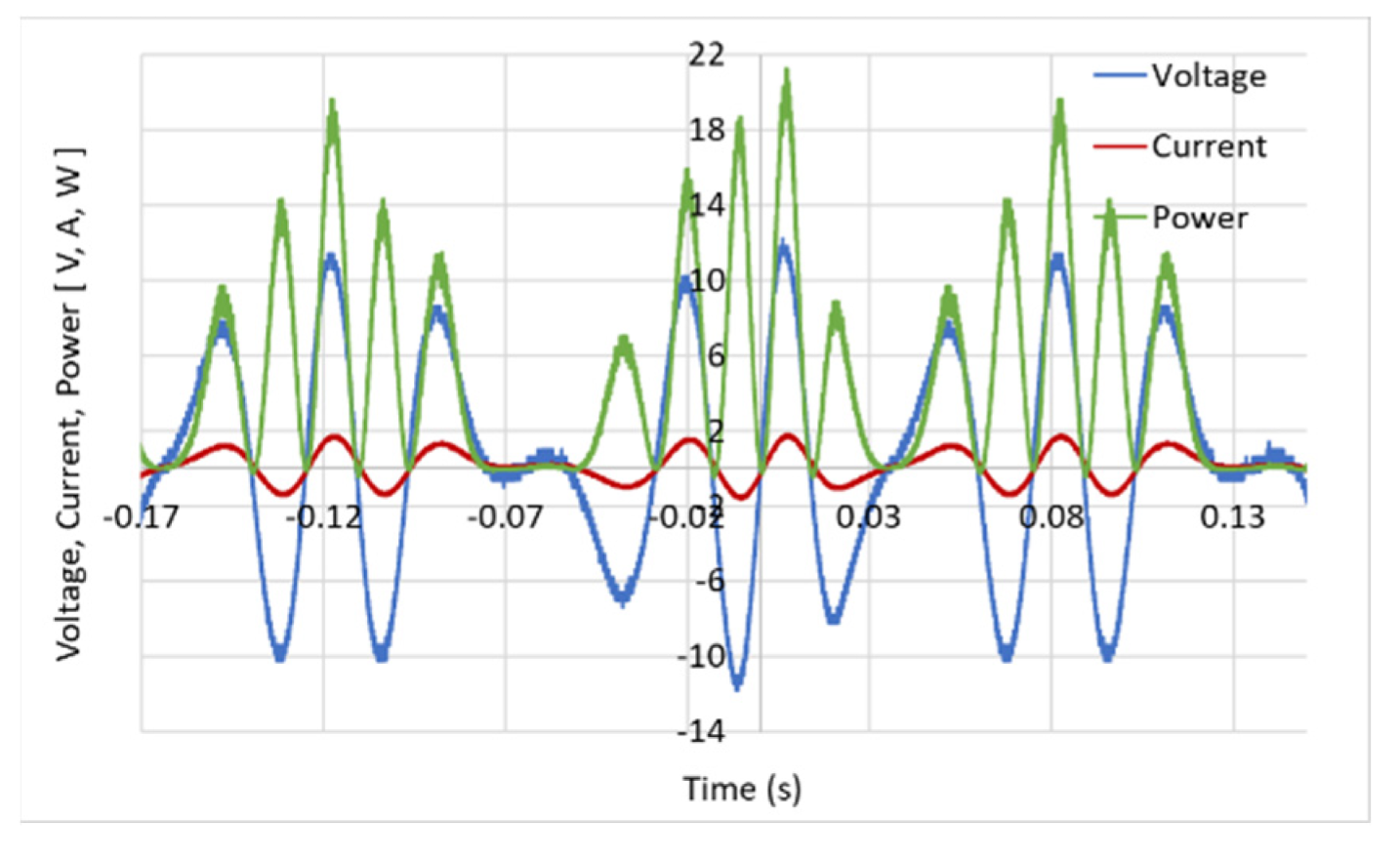
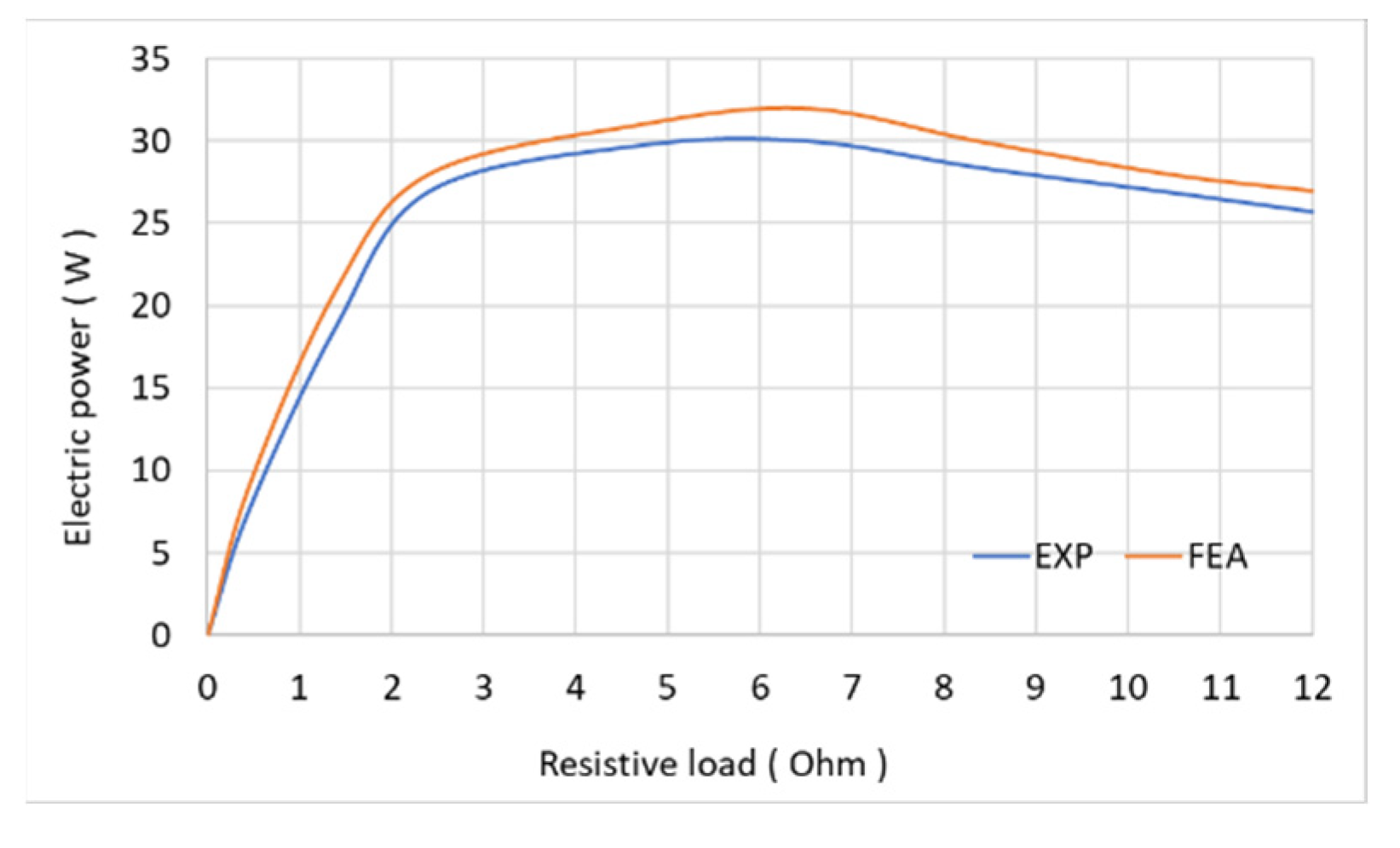
6.2.2. On-Load Electrical Testing
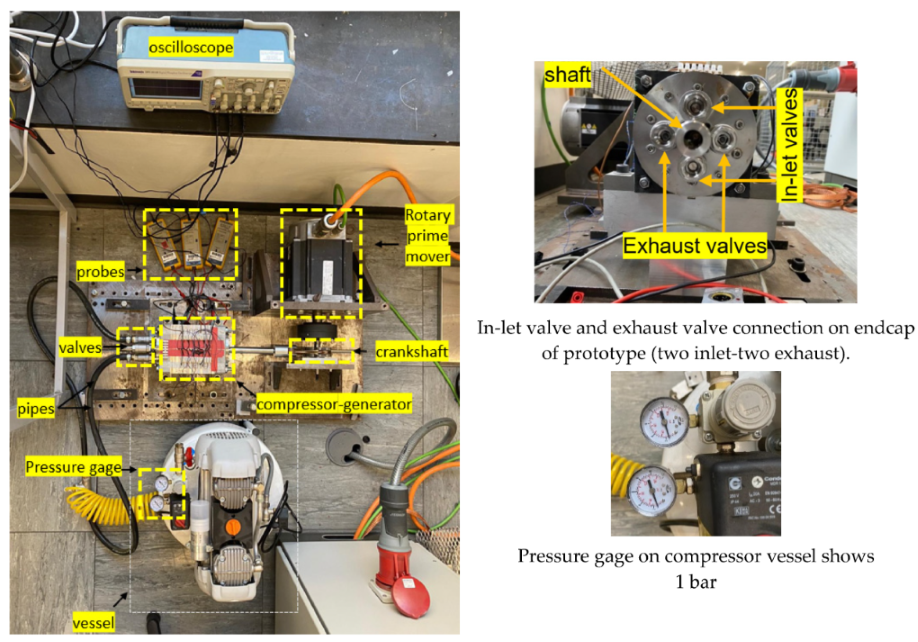
6.2.3. Compression Test
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
Abbreviations
| LEG | Linear Engine Generator |
| FPEG | Free Piston Engine Generator |
| LJEG | Linear Joule Engine Generator |
| PM | Permanent Magnet |
| TDC | Top Dead Centre |
| BDC | Bottom Dead Centre |
| SMC | Soft Magnetic Composite |
References
- Hansson, J. Analysis and Control of a Hybrid Vehicle Powered by Free-Piston Energy Converter. Ph.D. Thesis, KTH Royal Institute of Technology, Stockholm, Sweden, 2006. [Google Scholar]
- Hansson, J.; Leksell, M. Performance of a Series Hybrid Electric Vehicle with a Free-Piston Energy Converter. In Proceedings of the 2006 IEEE Vehicle Power and Propulsion Conference, Windsor, UK, 6–8 September 2006; IEEE: Piscataway, NJ, USA, 2006; pp. 1–6. [Google Scholar] [CrossRef]
- Goldsborough, S.S.; Van Blarigan, P. A Numerical Study of a Free Piston IC Engine Operating on Homogeneous Charge Compression Ignition Combustion. SAE Trans. 1999, 108, 959–972. [Google Scholar]
- Goldsborough, S.S.; Van Blarigan, P. Optimizing the Scavenging System for a Two-Stroke Cycle, Free Piston Engine for High Efficiency and Low Emissions: A Computational Approach. SAE Trans. 2003, 112, 1–20. [Google Scholar]
- Van Blarigan, P.; Paradiso, N.; Goldsborough, S. Homogeneous Charge Compression Ignition with a Free Piston: A New Approach to Ideal Otto Cycle Performance; SAE International: Warrendale, PA, USA, 1998. [Google Scholar]
- Atkinson, C.M.; Petreanu, S.; Clark, N.N.; Atkinson, R.J.; McDaniel, T.I.; Nandkumar, S.; Famouri, P. Numerical Simulation of a Two-Stroke Linear Engine-Alternator Combination. SAE Trans. 1999, 108, 1416–1430. [Google Scholar]
- Famouri, P.; Cawthorne, W.R.; Clark, N.; Atkinson, R.J.; McDaniel, T.I.; Nandkumar, S.; Famouri, P. Design and testing of a novel linear alternator and engine system for remote electrical power generation. In Proceedings of the IEEE Power Engineering Society, 1999 Winter Meeting (Cat. No.99CH36233), New York, NY, USA, 31 January 1999–4 February 1999; IEEE: Piscataway, NJ, USA, 1999. [Google Scholar]
- Mikalsen, R.; Roskilly, A.P. Performance simulation of a spark ignited free-piston engine generator. Appl. Therm. Eng. 2008, 28, 1726–1733. [Google Scholar] [CrossRef]
- Ferrari, C.; Friedrich, H.E. Development of a free-piston linear generator for use in an extended-range electric vehicle. In Proceedings of the EVS26 2012, Los Angeles, CA, USA, 6–9 May 2012. [Google Scholar]
- Kosaka, H.; Akita, T.; Moriya, K. Development of free piston engine linear generator system part 1—Investigation of fundamental characteristics. In SAE 2014 World Congress & Exhibition; SAE International: Warrendale, PA, USA, 2014. [Google Scholar]
- Goto, S.; Moriya, K.; Kosaka, H.; Akita, T.; Hotta, Y.; Umeno, T.; Nakakita, K. Development of free piston engine linear generator system part 2—Investigation of control system for generator. In SAE 2014 World Congress & Exhibition; SAE International: Warrendale, PA, USA, 2014. [Google Scholar]
- Ngwaka, U.; Smallbone, A.; Jia, B.; Lawrence, C.; Towell, B.; Roy, S.; Shivaprasad, K.V.; Roskilly, A.P. Evaluation of performance characteristics of a novel hydrogen-fuelled free-piston engine generator. Int. J. Hydrog. Energy 2021, 46, 33314–33324. [Google Scholar] [CrossRef]
- Mikalsen, R.; Roskilly, A.P. The free-piston reciprocating Joule Cycle engine: A new approach to efficient domestic CHP generation. In Proceedings of the ICAE 2012 Conference, Suzhou, China, 5–8 July 2012. [Google Scholar]
- Wu, D.; Roskilly, A.P. Design and parametric analysis of linear Joule-cycle engine with out-of-cylinder combustion. Energy Procedia 2014, 61, 1111–1114. [Google Scholar] [CrossRef] [Green Version]
- Jia, B.R.; Wu, D.; Andrew, S. Dynamic and thermodynamic characteristics of a linear Joule engine generator with different operating conditions. Energy Convers. Manag. 2018, 173, 375–382. [Google Scholar] [CrossRef]
- Ngwaka, U.; Jia, B.; Lawrence, C.; Wu, D.; Smallbone, A.; Roskilly, A.P. The characteristics of a Linear Joule Engine Generator operating on a dry friction principle. Appl. Energy 2019, 237, 49–59. [Google Scholar] [CrossRef]
- Jalal, A.S.; Baker, N.J.; Wu, D. Design of tubular Moving Magnet Linear Alternator for use with an External Combustion—Free Piston Engine. In Proceedings of the 8th IET International Conference on Power Electronics, Machines and Drives (PEMD 2016), Glasgow, UK, 19–21 April 2016; pp. 1–6. [Google Scholar] [CrossRef] [Green Version]
- Jalal, A.S. Design and Performance Investigation of Flux—Concentrated Tubular Linear Generator for an External Combustion Free Piston Engine. Ph.D. Thesis, Newcastle University, Newcastle, UK, 2017. [Google Scholar]
- Baker, N.J.; Korbekandi, R.M.; Jalal, A.S.; Wu, D. Performance of a tubular machine driven by an external-combustion free-piston engine. J. Eng. 2019, 2019, 3867–3871. [Google Scholar] [CrossRef]
- Baker, N.J.; Jalal, A.S.; Wang, J.; Korbekandi, R.M. Experimental comparison of two linear machines developed for the free piston engine. J. Eng. 2019, 2019, 4406–4410. [Google Scholar] [CrossRef]
- Korbekandi, R.M.; Baker, N.J.; Wu, D. A study of translator length in a tubular linear electrical machine designed for use in a linear combustion joule engine. In Proceedings of the 12th International Symposium on Linear Drives for Industry Applications (LDIA), Neuchâtel, Switzerland, 1–3 July 2019; pp. 1–6. [Google Scholar] [CrossRef]
- Baker, N.J.; Korbekandi, R.M.; Wu, D.; Jalal, A.S. An Investigation of Short Translator Linear Machines for Use in a Free Piston Engine. In Proceedings of the IEEE International Electric Machines & Drives Conference (IEMDC), Virtual Event, 12–15 May 2019; pp. 68–73. [Google Scholar] [CrossRef]
- Wu, D.; Tan, H.M.; Jia, B.; Roskilly, A.P. A preliminary experimental study on a lab-scale Linear Joule Engine prototype. Energy Procedia 2019, 158, 2244–2249. [Google Scholar] [CrossRef]
- Jia, B.; Wu, D.; Smallbone, A.; Lawrence, C.; Roskilly, A.P. Design, modelling and validation of a linear Joule Engine generator designed for renewable energy sources. Energy Convers. Manag. 2018, 165, 25–34. [Google Scholar] [CrossRef] [Green Version]
- Mikalsen, R.; Roskilly, A.P. A review of free-piston engine history and applications. Appl. Therm. Eng. 2007, 27, 2339–2352. [Google Scholar] [CrossRef] [Green Version]
- Bade, M.; Clark, N.N.; Musho, T.; Famouri, P. Piston Rings Friction Comparison in a Free Piston and Conventional Crankshaft Engines. In Proceedings of the ASME 2018 Internal Combustion Engine Division Fall Technical Conference, San Diego, CA, USA, 4–7 November 2018; Volume 2. [Google Scholar]
- Heywood, J.B. Internal Combustion Engine Fundamentals; Mcgraw-Hill: New York, NY, USA, 1988; Volume 930. [Google Scholar]
- Pennestrì, E.; Rossi, V.; Salvini, P.; Valentini, P.P. Review and comparison of dry friction force models. Nonlinear Dyn. 2016, 83, 1785–1801. [Google Scholar] [CrossRef]
- Jalal, A.S.; Baker, N.J.; Wu, D. Electrical machine design for use in an external combustion free piston engine. In Proceedings of the 5th IET International Conference on Renewable Power Generation (RPG) 2016, London, UK, 21–23 September 2016; pp. 1–6. [Google Scholar] [CrossRef] [Green Version]
- Korbekandi, R.M.; Baker, N.J. Design, build and testing of an integrated compressor-generator. In Proceedings of the 2021 IEEE Energy Conversion Congress and Exposition, Vancouver, BC, Canada, 10–14 October 2021; IEEE: Piscataway, NJ, USA, 2021. [Google Scholar]
- Korbekandi, R.M.; Baker, N.J.; Kulan, M.; Wu, D. Modelling and build of an integrated linear engine generator designed for power density. In Proceedings of the IEEE Energy Conversion Congress and Exposition, Vancouver, BC, Canada, 10–14 October 2021; IEEE: Piscataway, NJ, USA, 2021; pp. 4103–4110. [Google Scholar] [CrossRef]






























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Components | Parameters [Unit] | Generator Configuration | ||
|---|---|---|---|---|
| Model ‘A’ | Model ‘B’ | Model ‘C’ | ||
| linear expander | Moving mass [kg] | 9 | 5.2 | 5.2 |
| Maximum stroke [mm] | 120 | 120 | 120 | |
| Inlet pressure [bar] | 6.19~7.20 | 6.57~7.88 | 7.12~8.34 | |
| Inlet temperature [K] | 1037~1077 | 1052~1112 | 1074~1165 | |
| linear compressor | Inlet pressure [bar] | 1 | 1 | 1 |
| Outlet pressure [bar] | 6.5~7 | 7.1~7.7 | 7.8~8.4 | |
| Linear generator | Stator outer diameter [mm] | 180 | 180 | 180 |
| Translator outer diameter [mm] | 103 | 103 | 103 | |
| Active electromagnetic length [mm] | 120 | 120 | 120 | |
| Machine length [mm] | 240 | 240 | 240 | |
| Parameter, Unit | Generator Configuration | ||
|---|---|---|---|
| Model ‘A’ | Model ‘B’ | Model ‘C’ | |
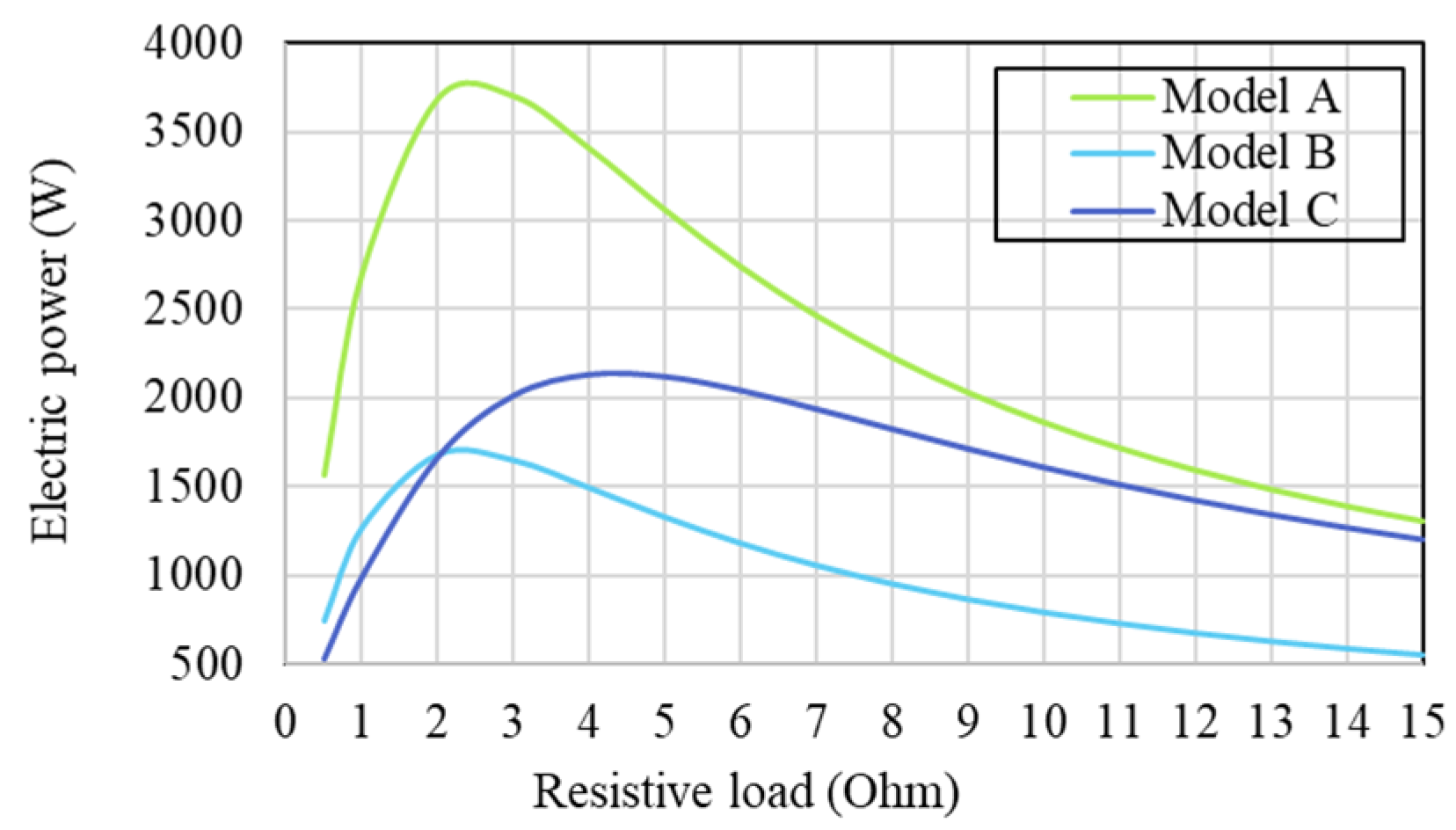
| Generator’s peak electrical power, W | 1770 | 1710 | 2120 |
| Engine mechanical power, W | 1933 | 1830 | 2390 |
| Heat energy, W | 6100 | 8960 | 8750 |
| Power efficiency, % | 91.5 | 93.4 | 88.7 |
| System efficiency, % | 30 | 19 | 25 |
| Piston amplitude, mm | 116.4 | 118.2 | 117.8 |
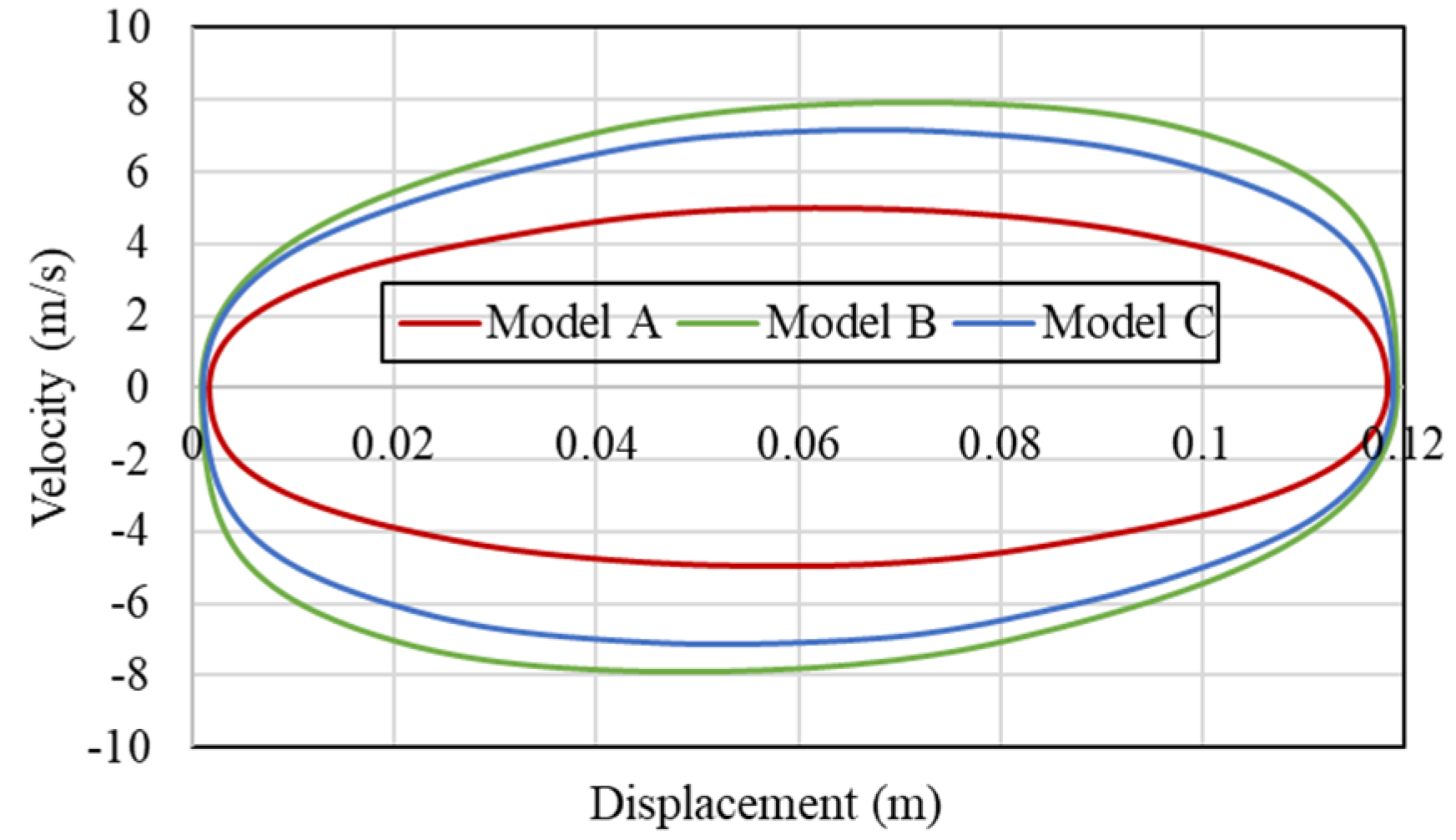
| Peak velocity, m/s | 4.9 | 7.9 | 7.1 |
| Frequency, Hz | 15 | 24 | 22 |
| Integrated volume, cm3 | 9.16 | 9.16 | 6.11 |
| PM mass, kg | 3.18 | 1.59 | 1.59 |
| Piston-Translator mass, kg | 9 | 5.2 | 5.2 |
| Total mass, kg | 24.37 | 37.13 | 37.13 |
| Generator price, £ | 446 | 288 | 288 |
| Voltage | ≈45 | Volts |
| Stroke | 50 | mm |
| N (speed) | 600 | rpm |
| Velocity | 1 | m/s |
| T | 0.015 | s |
| 66.67 | Hz |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Moeini Korbekandi, R.; Baker, N.J.; Kulan, M.C.; Jalal, A.S.; Wu, D.; Li, M. Dynamic Characteristics and Demonstration of an Integrated Linear Engine Generator with Alternative Electrical Machines. Energies 2022, 15, 5295. https://doi.org/10.3390/en15145295
Moeini Korbekandi R, Baker NJ, Kulan MC, Jalal AS, Wu D, Li M. Dynamic Characteristics and Demonstration of an Integrated Linear Engine Generator with Alternative Electrical Machines. Energies. 2022; 15(14):5295. https://doi.org/10.3390/en15145295
Chicago/Turabian StyleMoeini Korbekandi, Ramin, Nick J. Baker, Mehmet C. Kulan, Aslan S. Jalal, Dawei Wu, and Mingqiang Li. 2022. "Dynamic Characteristics and Demonstration of an Integrated Linear Engine Generator with Alternative Electrical Machines" Energies 15, no. 14: 5295. https://doi.org/10.3390/en15145295