3.1. Results of Simulation Research Using Power Flow
The histograms of the whole network evaluation function values for all input data are shown below. The range for the evaluation value in the histograms is five (width column—X-axis. On the Y-axis, we have a normalized number of results for a given interval of the evaluation function value. The lower the value of the evaluation function, the smaller the voltage error.
Figure 8 shows the results when the voltage regulation and reactive power compensation system are turned off. The ratio transformer is 110/15. 34% of the results fall within the first range of the evaluation function value. However, there are results with values above 200.
Figure 9 shows the simulation results for the classic tap semiconductor control algorithm using only the voltage measurement on the HV/MV transformer. You can see a significant improvement in the quality of the voltage. Most of the simulation results fall within the first four columns of the histogram.
Figure 10 shows the optimization result performed with the evolutionary algorithm. This algorithm used voltage measurements at all 15 kV nodes. You can see that almost all the results fall within the first range of the evaluation function value.
The following figures show the results for the independently operating voltage regulation system and independent reactive power compensation. For the case without voltage regulation, the reactive power compensation system improved the results. In other cases, the influence of reactive power compensation is not visible when analyzing all the results (
Figure 11,
Figure 12,
Figure 13,
Figure 14 and
Figure 15).
Histogram of evaluation value—voltage regulation optimization by means of an evolutionary algorithm and with reactive power compensation is identical to the histogram of evaluation value—voltage regulation optimization by means of an evolutionary algorithm and without reactive power compensation. This is due to the fact that no reactive power compensation was needed for the results obtained from the evolutionary algorithm.
The table below shows the maximum number of required capacitor banks for the three control variants without reactive power compensation (
Table 2).
The voltage values for the selected network node for three control variants without reactive power compensation are presented below.
As you can see (
Figure 13) in the variant without voltage regulation, it varies widely from 0.578 to 1.267, which is beyond the allowable range. With classic regulation, the voltage variability is smaller, but it exceeds the lower limit. In the case of regulation with the use of the evolutionary algorithm, the range of voltage changes is in the upper half of the allowable range and does not exceed it. It also results that in the most distant network nodes the voltage will decrease, which ensures voltage variability in them within the permissible range. Moreover, the voltage variation is the smallest.
Node 7 is at the end of one of the MV lines. As shown in
Figure 14, the voltage is often below the lower voltage limit in classic regulation. In the case of regulation using the evolutionary algorithm, the lower voltage limit is rarely exceeded, after the regulation possibilities are exhausted. In order to verify this, a table with levels of regulation for selected time moments is presented.
As you can see (
Table 3), when the lower voltage limit is exceeded, the tap changer was in the position to increase the voltage the most despite external conditions. With classic regulation, unfortunately, most of the time the voltage is below the lower limit.
The table below shows the minimum, maximum, average and variance voltage values for the selected nodes (
Table 4). The results of the statistical analysis for the three variants of voltage regulation confirm the conclusions of the presented voltage diagrams (
Figure 11,
Figure 12,
Figure 13,
Figure 14,
Figure 15,
Figure 16 and
Figure 17). When analyzing the minimum and maximum values for the three control variants, it is clear that in the case of no regulation, these values are outside the range of permissible values. In the case of classical regulation, there was an improvement. It is true that the minimum values exceed the lower limit of the permissible voltage range. Only the results obtained using the evolutionary algorithm with access to the current measurement values of the network nodes allowed for a significant improvement in the quality of voltage regulation. The minimum voltage is slightly below the permissible value, but it still doubles compared to the other variants. Variance is a measure of the volatility of a given. In the case of voltage regulation, despite the changes in the voltage supplying the substation and changes in the power consumed in stations 15/0.4, the system is designed to maintain the range of voltage changes within the permissible range. Moreover, it was shown that the voltage variability was about 100 times lower in all analyzed nodes in relation to the other control variants (evolution algorithm).
On this basis, it has been shown that the evolution algorithm using measurement data from all network nodes provides the best quality of voltage regulation. The presented results justify the need to use the measurements, e.g., voltages in stations 15/0.4 in order to significantly improve the quality of voltage regulation. Voltage regulation with the use of evolutionary algorithms maintains the voltage value in nodes most often in the range from 1 to 1.05 p.u. This prevents the voltage drops at the ends of the lines from dropping too much due to voltage drops.
There is one problem with building a voltage regulator. This regulator should work with a time resolution of at least one period of the mains voltage. Moreover, for the simulated data in the case of voltage regulation for the variant using the evolutionary algorithm, there was no need for reactive power compensation.
It follows that the evolutionary algorithm cannot be directly used to build the controller due to the fact that obtaining the results with its use required a long time.
In practice, reactive power compensation is often required in power stations. For this reason, additional simulation data was generated for which high reactive power compensation will be required. For this reason, another set of input data was prepared for the simulation. However, in this case, we have a problem of multi-criteria optimization. The reactive power at the node and the RMS voltage are strongly related.
3.3. Results of Simulation Research Using Power Flow Calculations in Pareto Multi-Criteria Optimizing
One of the solutions is presented below (
Table 8). Out of 8200 possible solutions, the two-criteria optimization algorithm chose four (see
Figure 18). Then the Pareto-front solution selection algorithm chose solution no 4.
Then, the results of three simulations were compared for a dataset with high reactive power demand. The first one was carried out with the help of an evolutionary algorithm—single-criterion optimization. The second one, using the results from the first one, uses the classic algorithm for reactive power compensation. The last one was carried out with the use of two-criteria optimization (see
Table 9 and
Table 10).
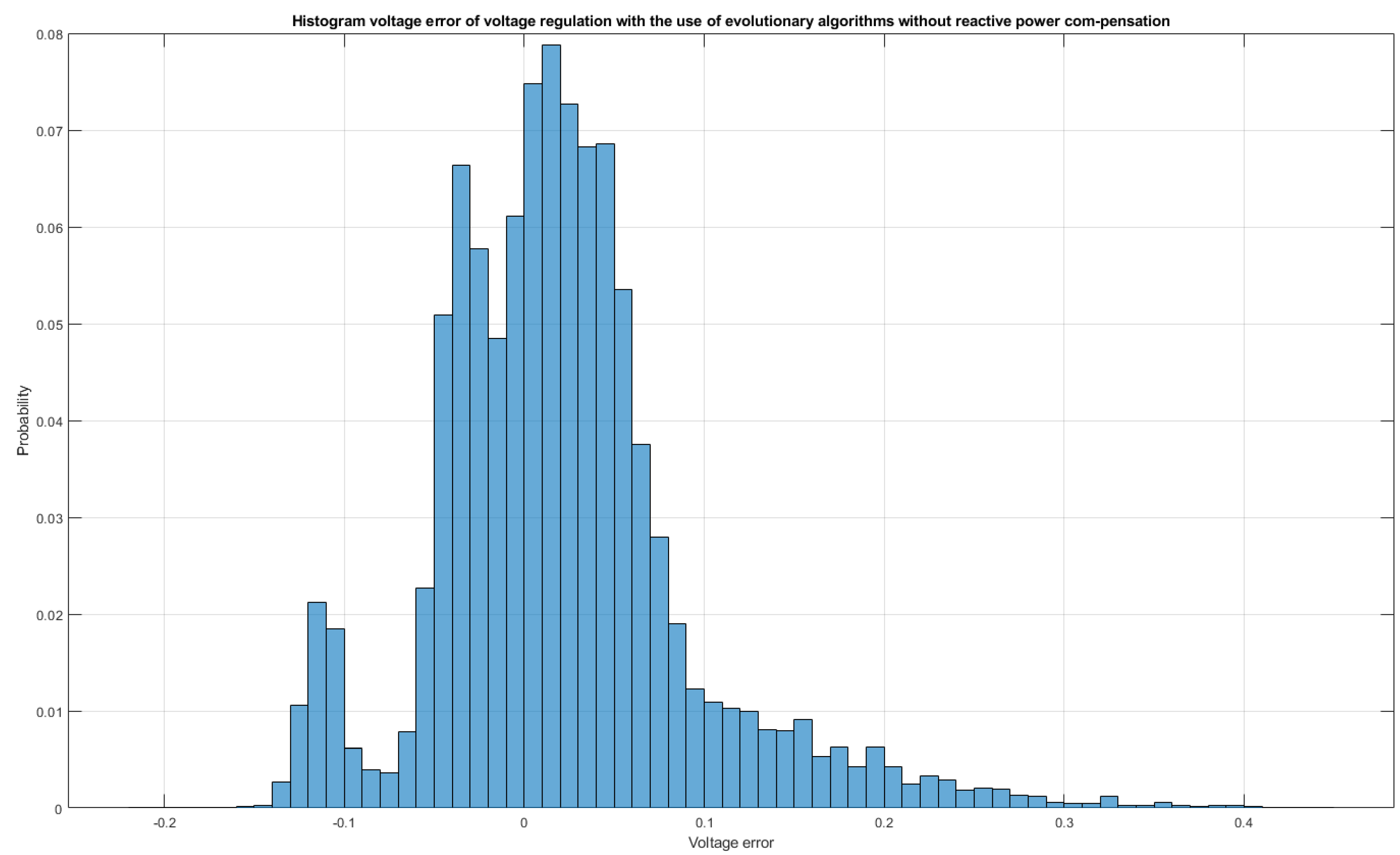
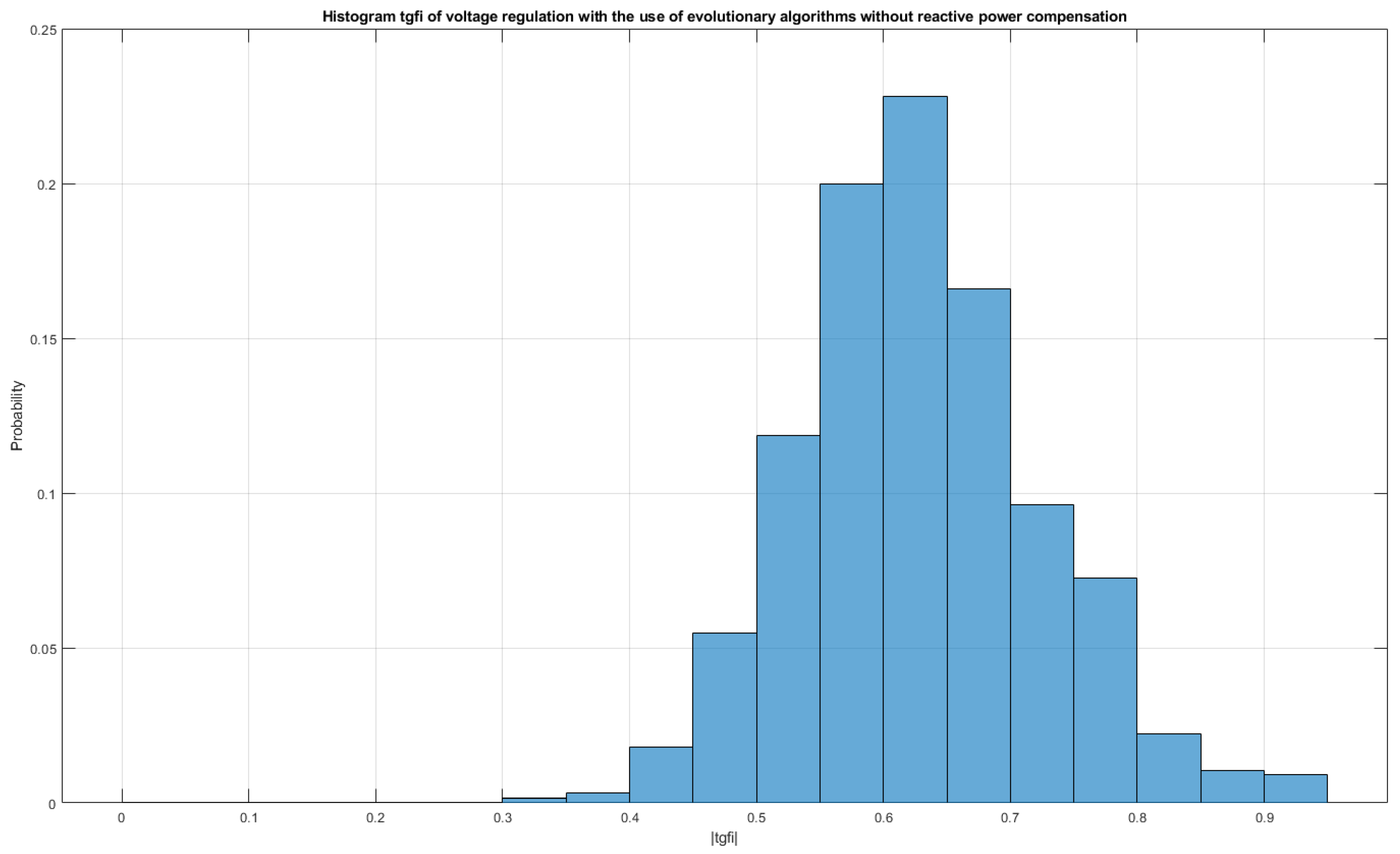
In the case of voltage regulation with the use of evolutionary algorithms without reactive power compensation, there are large positive voltage errors. The maximum tgφ factor significantly exceeds the permissible value. In the case of voltage regulation using evolutionary algorithms with independent reactive power compensation, the tgφ range has improved, but it also exceeds the allowable value. The voltage deviations range from ±20% of Un. Only the reaction with multi-criteria optimization keeps the tgφ in the correct range. The range of voltage deviations slightly exceeds the permissible value by a maximum of 4% Un.
The first three figures show the frequency distribution of the voltage error.
Figure 19 shows the voltage error for the evolution algorithm. The next
Figure 20 shows the voltage error for the evolution algorithm with independent reactive power compensation.
Figure 21 shows the voltage deviation for two-criteria optimization and the algorithm for selecting the Pareto front solution. For multi-criteria optimization, the obtained values were the smallest range of voltage errors and the highest frequency of errors close to zero. The charts above show that multi-criteria optimization works best. The next three figures refer to the absolute value of the
tgφ coefficient.
Figure 22 shows the results of optimization of the evolution algorithm. The next
Figure 23 shows
tgφ and the evolution algorithm with independent reactive power compensation.
Figure 24 shows the
tgφ for two-criteria optimization and the algorithm for selecting a Pareto front solution. Only for the multi-criteria algorithm, the results of the
tgφ coefficient were obtained within the acceptable range.




























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}