
Design and Research on Electro-Hydraulic Drive and Energy Recovery System of the Electric Excavator Boom



Abstract
:1. Introduction
1.1. Literature Review
1.2. Prevalent Problems
1.3. Challenges and the Future
1.4. Contribution of This Work
- This paper proposes a new electro-hydraulic drive and energy recovery system for the electric excavator boom, which realizes the mutual conversion of mechanical, electric and hydraulic energy.
- The energy flow of the system, the relationship between the required power flow, and torque is analyzed in order to realize real-time control when the boom is lifting and falling.
- A regular energy management strategy under typical working conditions is proposed, which greatly improves energy utilization and potential energy recovery.
1.5. Organization of This Paper
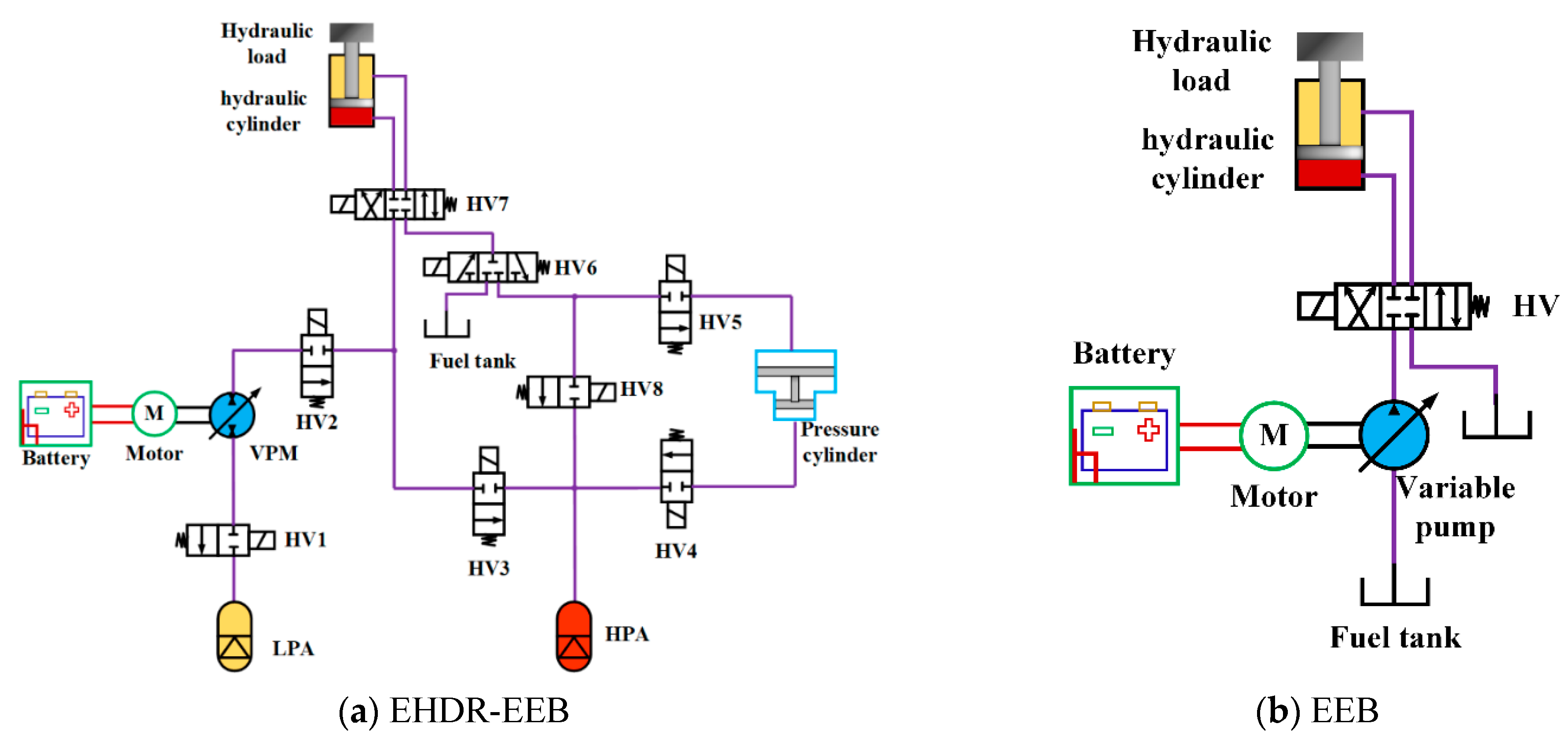
2. Design of the EHDR-EEB
2.1. Structure of the EHDR-EEB
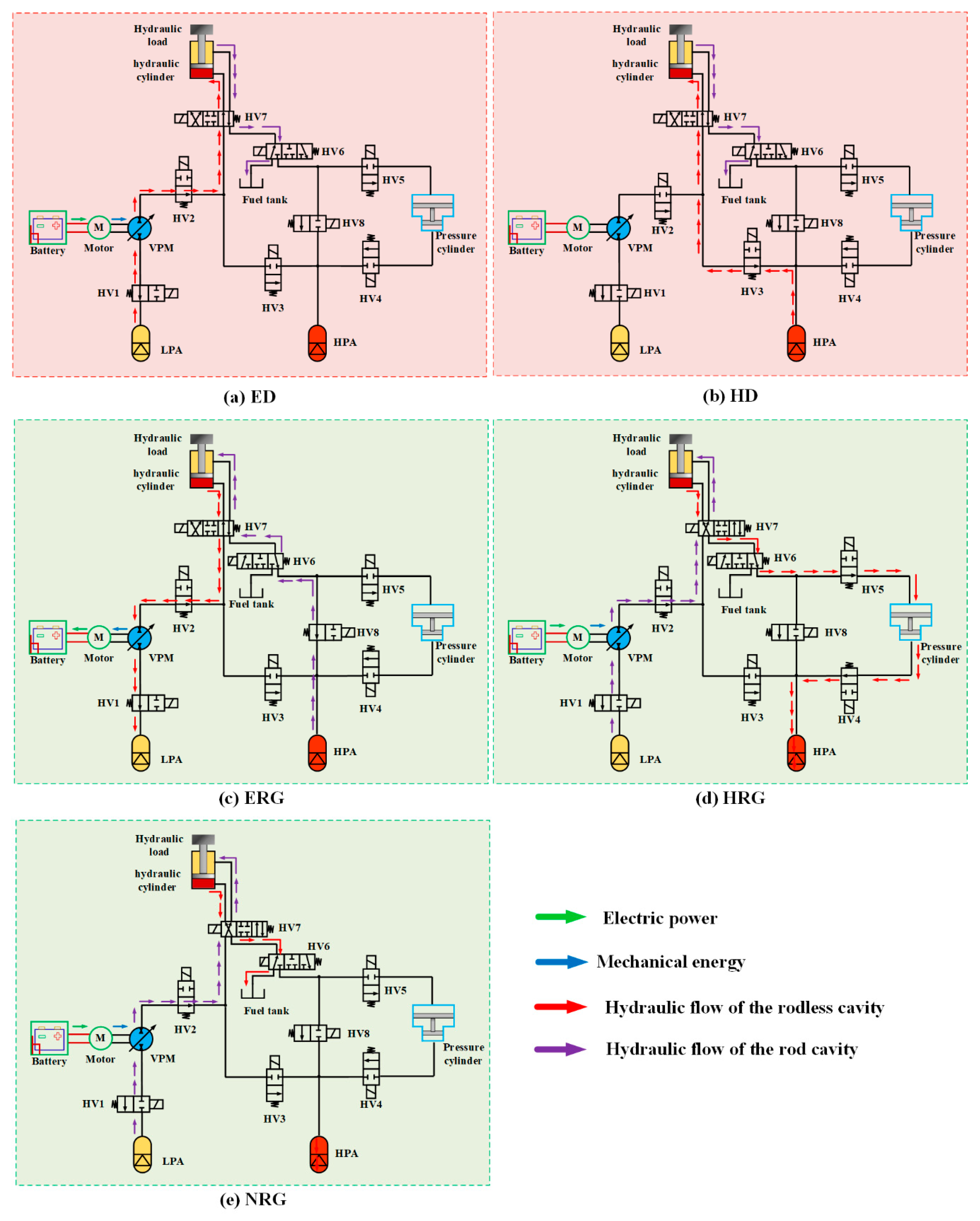
2.2. Principle and Modes of the EHDR-EEB
- (1)
- Electrodynamic drive (ED). In this mode, HV1 and HV2 are open, HV7 is in the right position, and HV6 is in the left position. When the motor works, electrical energy is transformed into hydraulic energy through the battery, motor, and VPM. In this case, the VPM is used as a pump, and the low-pressure oil is sucked from the LPA, then transported to the rodless cavity of the hydraulic cylinder through HV2 and HV7. Finally, the hydraulic cylinder piston overcomes the load gravity under the action of pressure and lifts upward. The oil in the rod cavity of the hydraulic cylinder flows back to the fuel tank through HV7 and HV6.
- (2)
- Hydrodynamic drive (HD). At this time, HV3 is open, HV7 is in the right state, and HV6 is in the left state. The hydraulic oil is delivered from HPA to the rodless cavity of the hydraulic cylinder through HV3 and HV7. The hydraulic cylinder piston lifts upward as described above. The oil in the rod cavity of the hydraulic cylinder flows back to the tank through HV7 and HV6.
- (3)
- Electric regeneration (ERG). During the load falling process, the battery can recover electrical energy relying on the potential energy of the boom. HV1, HV2, HV8 are in the open state, HV7 is in the right position, and HV6 is in the right position. The piston in the hydraulic cylinder descends under the action of boom gravity and the HPA, and pushes the oil in the rodless cavity into the LPA through HV7 and HV2. Meanwhile, the VPM is used as a motor, which converts hydraulic energy into mechanical energy and drives the motor to work. Afterwards, the motor is used as a generator to output negative torque, convert mechanical energy into electrical energy and store it in the battery.
- (4)
- Hydraulic regeneration (HRG). When the boom falls, the HPA can recover potential hydraulic energy under the gravity of the boom. Now, HV1, HV2, HV4, and HV5 are open, HV7 is in the left state, and HV6 is in the right state. The piston in the hydraulic cylinder descends with the help of the boom gravity and the VPM, and pushes the oil in the rodless cavity into the HPA through HV7, HV6, HV5, the pressure cylinder and HV4. In this case, the hydraulic energy directly charges the HPA without conversion.
- (5)
- No regeneration (NRG). If the battery SOC and the HPA pressure are greater than the set threshold in the falling process, HV2 is turned on, and HV7 and HV6 are in the left position. The piston of the hydraulic cylinder descends. The hydraulic oil enters the rod cavity of the hydraulic cylinder through the LPA, VPM and HV2, while the oil in the rodless cavity enters the fuel tank through HV7 and HV6.
3. Energy Management Strategy Design
3.1. Mathematical Modeling
3.1.1. Battery Model
- (1)
- Battery energy
- (2)
- Battery power
3.1.2. Motor Model
3.1.3. Accumulator Model
- (1)
- Working pressure of accumulator
- (2)
- Inflation pressure
- (3)
- The maximum recovery energy and volume of the accumulator
3.1.4. Variable Hydraulic Pump/Motor (VPM)
3.2. Rule-Based Energy Management Strategy
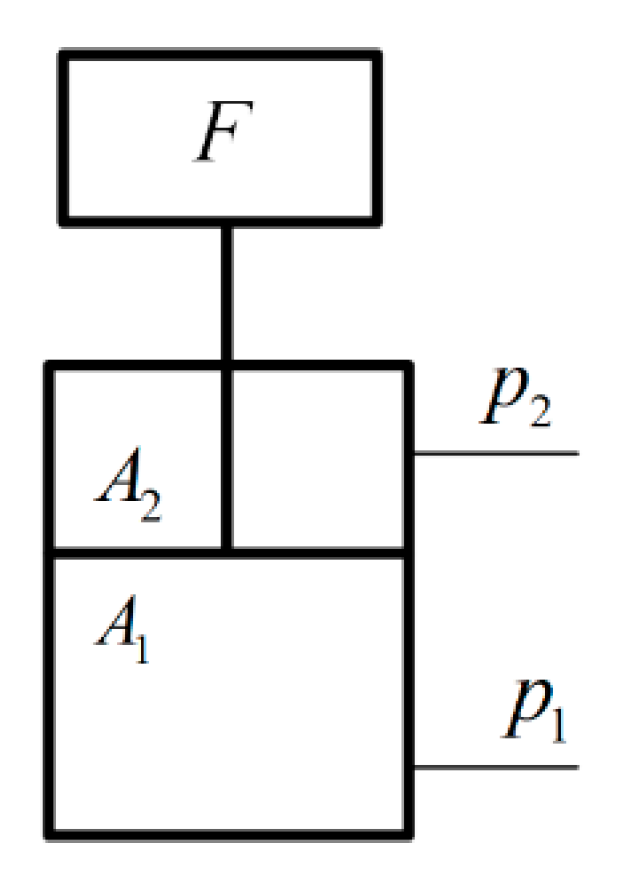
3.2.1. Mechanical Model of the Hydraulic Cylinder in Boom
3.2.2. Demand Flow
3.2.3. Demand Power and Torque of the Motor
- (1)
- ED
- (2)
- HD
- (3)
- ERG
- (4)
- HRG
- (5)
- NRG
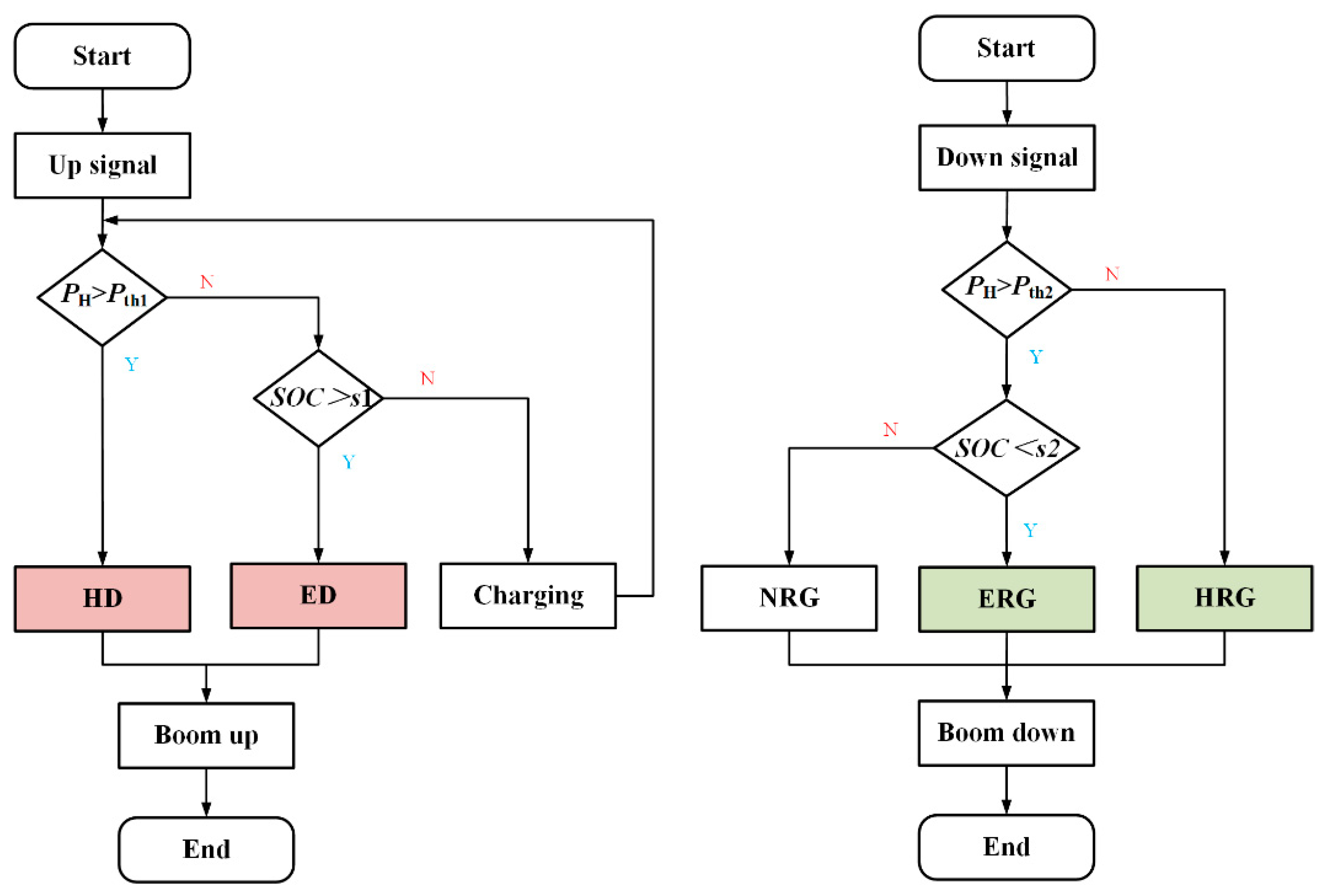
3.2.4. Energy Management Flowchart
4. Simulation Analysis
4.1. Component Selection
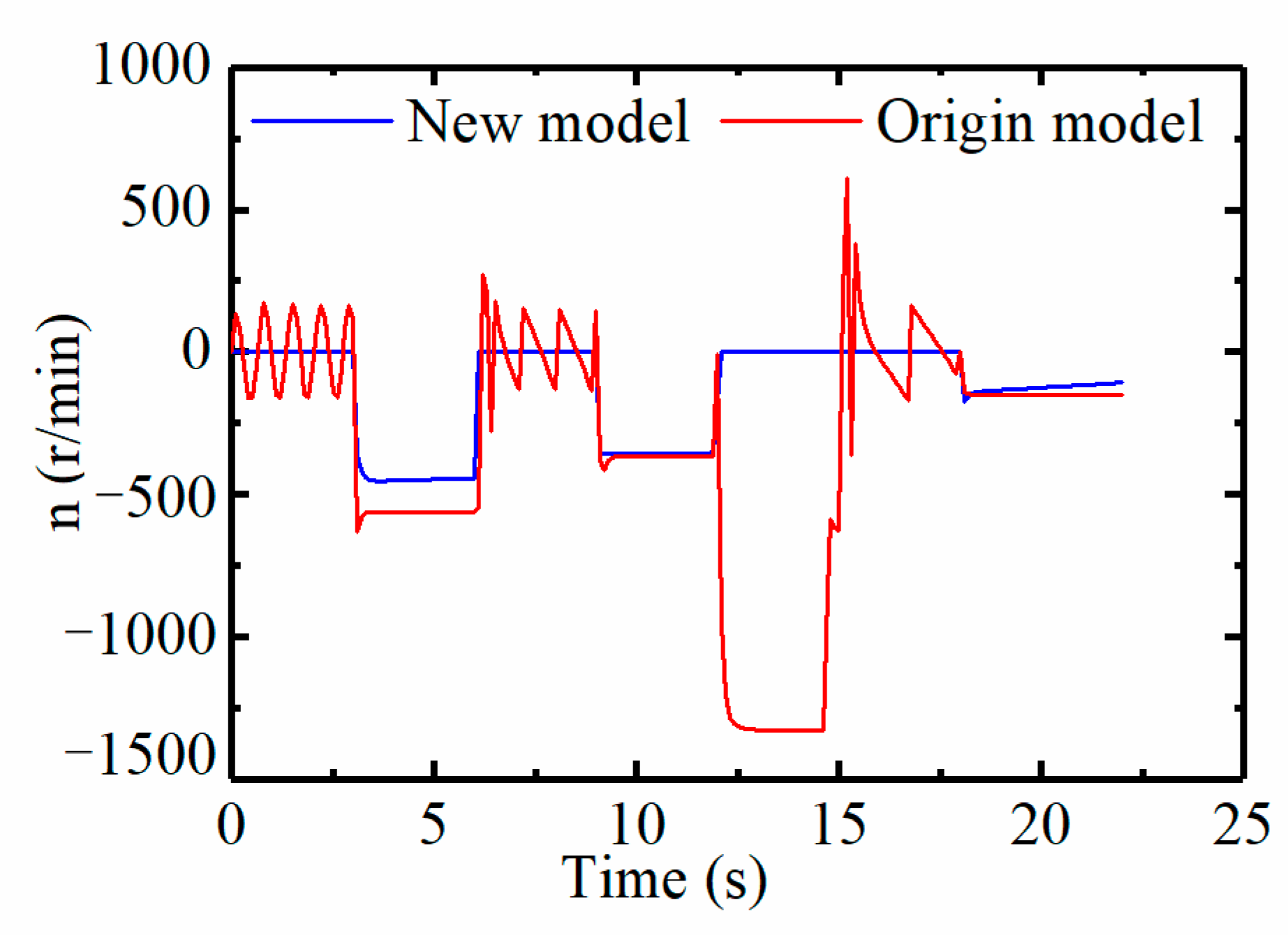
4.2. Analysis of Boom Motion Characteristics
- (1)
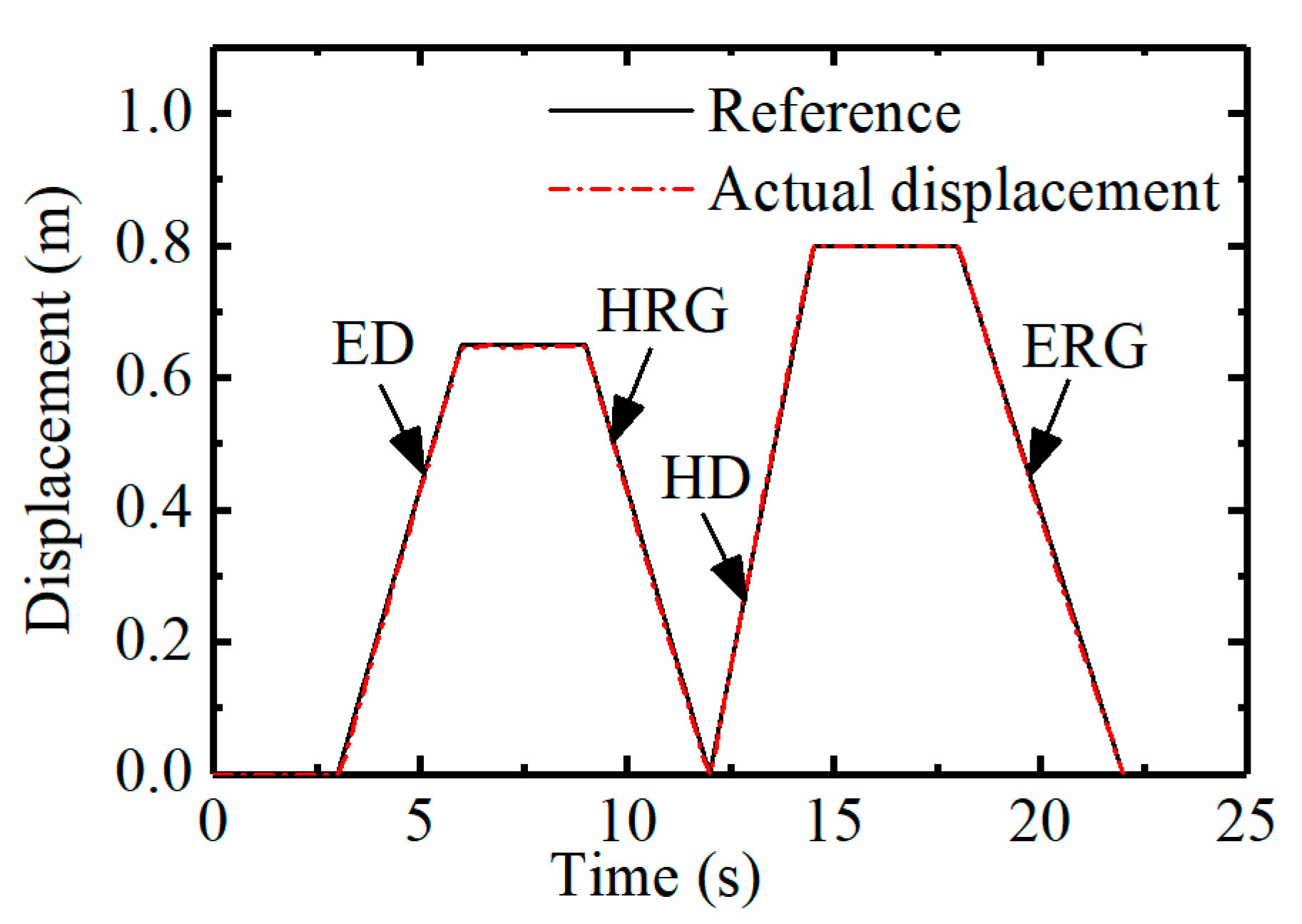
- The reference curve is the motion characteristics of the original boom system, and the actual displacement curve is the EHDR-EEB motion characteristics. The purpose is to compare the EHDR-EEB with the original system and make the new system as close as possible to the kinematic characteristics of the original boom system.
- (2)
- Test cycle time setting: the boom piston starts to move from 3 s; it takes about 3 s to rise to 0.65 m, stays for 3 s, and then descends to the lowest position. After that, it rises to the highest position 0.8 m for 3 s, and stays at the highest position for 3 s. Finally, it takes about 4 s to drop to the lowest position. The test cycle and the movement trajectory of the boom piston are shown in Figure 5.
- (3)
- The position setting of the boom cylinder piston: the piston stops at the maximum position 0.8 m. and the middle position is at about 0.65 M.
- (4)
- During lifting process, it is assumed that the external load remains unchanged. In the falling process, the unloading work has been completed, and the load is zero.
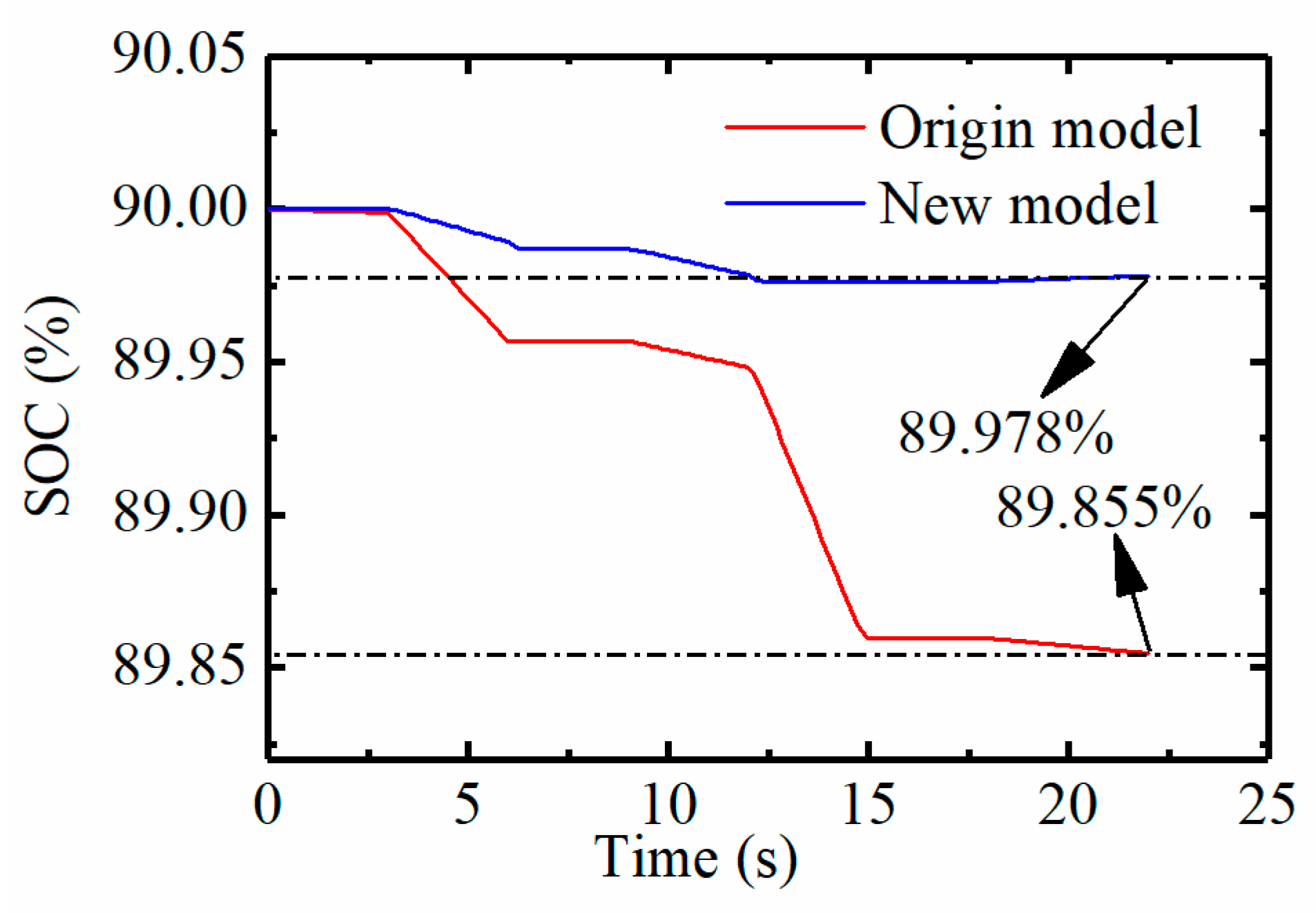
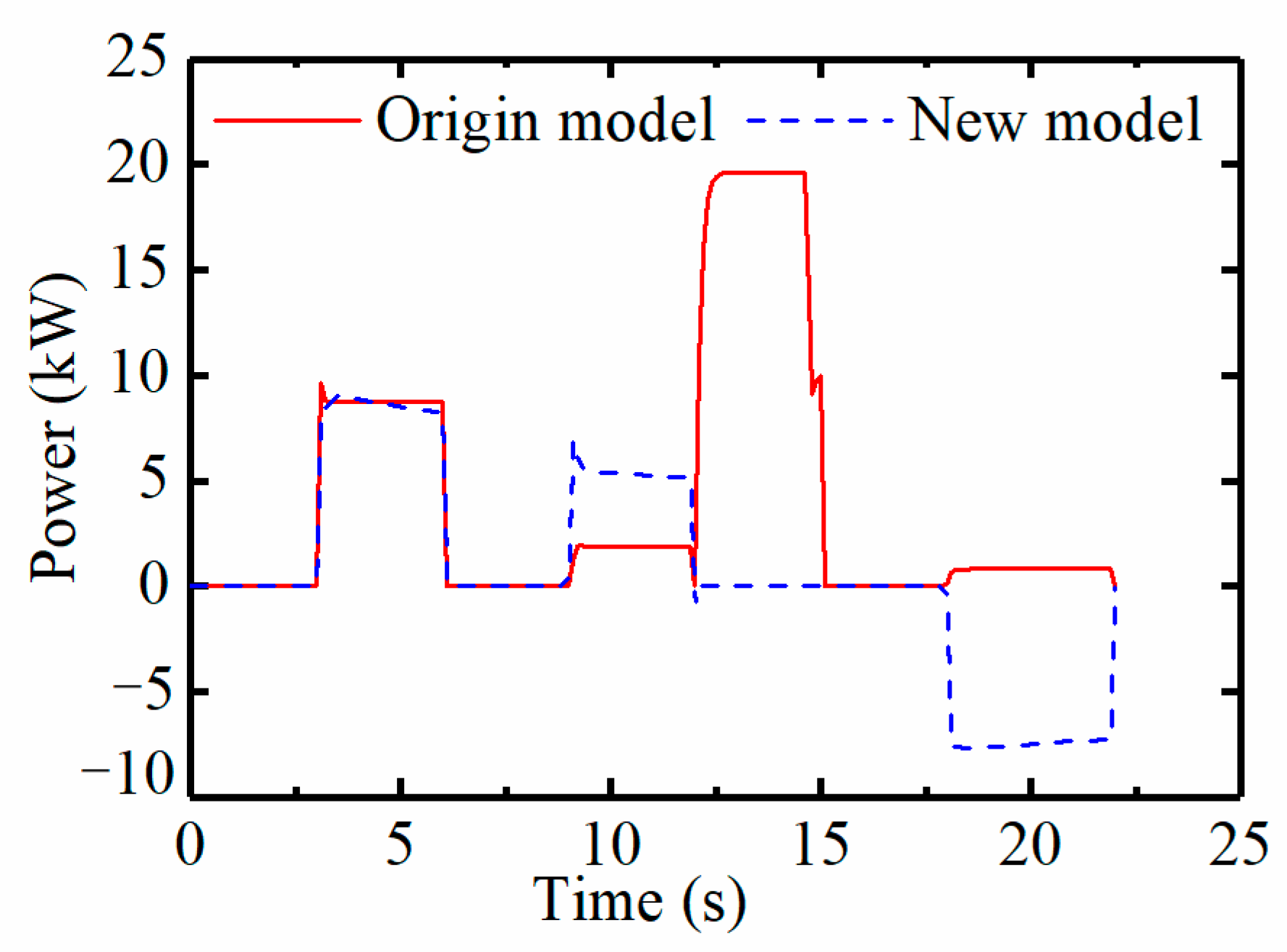
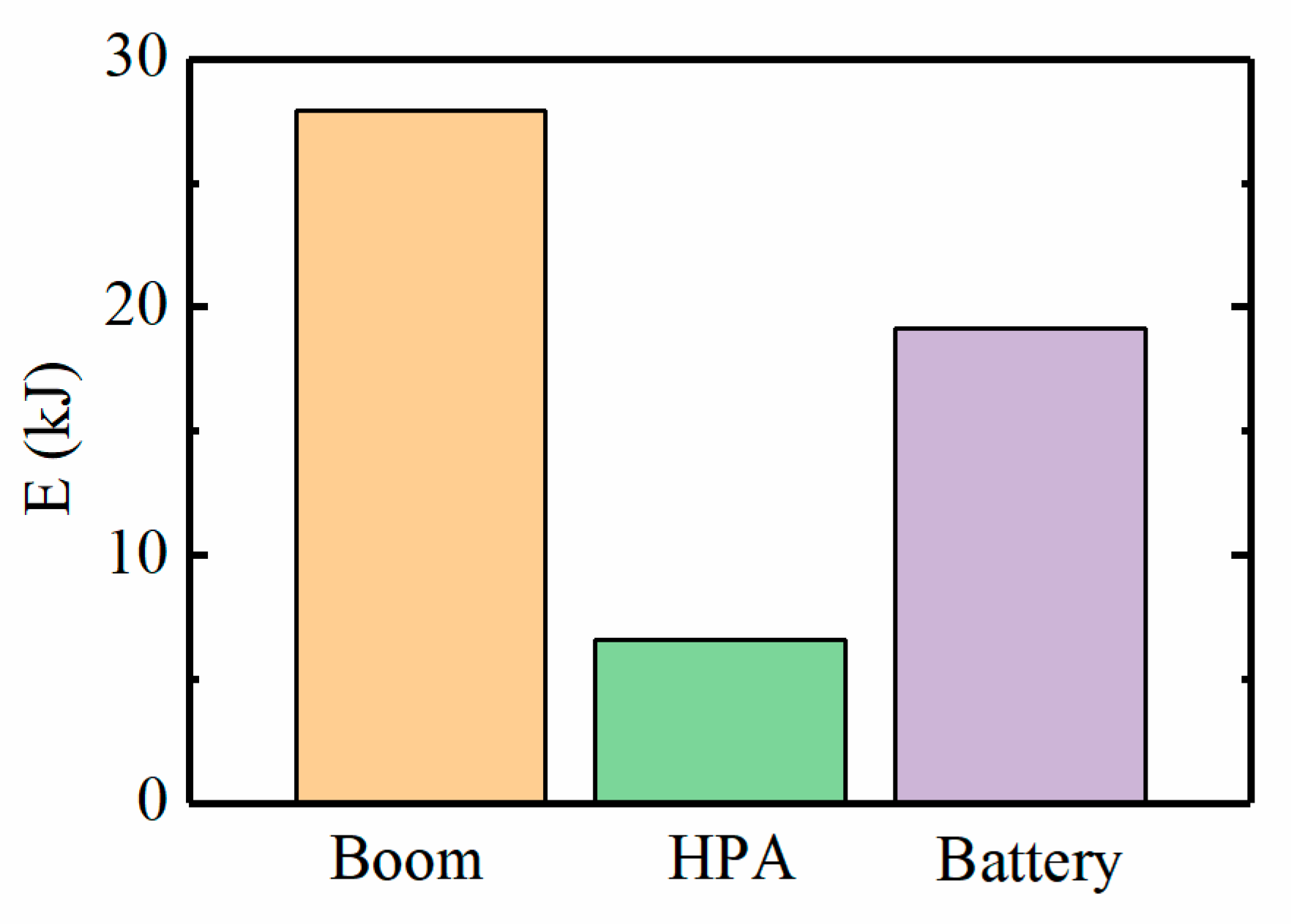
4.3. Operating Energy Consumption Analysis
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Nomenclature
| EHDR-EEB | Electro-hydraulic drive and energy recovery system of the electric Excavator Boom |
| EEB | Electric excavator boom |
| VPM | Variable hydraulic pump/motor |
| HPA | High pressure accumulator |
| LPA | Low pressure accumulator |
| ED | Electrodynamic drive |
| HD | Hydrodynamic drive |
| ERG | Electric regeneration |
| HRG | Hydraulic regeneration |
| NRG | No regeneration |
| SOC | State of charge |
References
- Vacca, A. Energy efficiency and controllability of fluid power systems. Energies 2018, 11, 1169. [Google Scholar] [CrossRef] [Green Version]
- Ding, R.; Zhang, J.; Xu, B.; Cheng, M.; Pan, M. Energy efficiency improvement of heavy-load mobile hydraulic manipulator with electronically tunable operating modes. Energy Convers Manag. 2019, 188, 447–461. [Google Scholar] [CrossRef]
- Wu, W. Study on Energy-Saving and Power Matching of Parallel-Hybrid Hydraulic Excavator. Ph.D. Thesis, Southwest Jiaotong University, Chengdu, China, 2015. [Google Scholar]
- Chen, M.; Zhao, D. The gravitational potential energy regeneration system with closed-circuit of boom of hydraulic excavator. Mech. Syst. Signal Process. 2017, 82, 178–192. [Google Scholar] [CrossRef]
- Yu, Y.-X.; Ahn, K.K. Energy regeneration and reuse of excavator swing system with hydraulic accumulator. Int. J. Precis. Eng. Manuf. Green Technol. 2020, 7, 859–873. [Google Scholar] [CrossRef]
- Li, J.; Ding, H.; Zhao, J.; Qin, J.; Shi, J.; Wang, Z. Design and simulation analysis of hybrid boom potential energy recovery system for super large hydraulic excavator. Chin. Hydraul. Pneum. 2019, 7, 33–38. [Google Scholar]
- Fu, C.; Zou, G. Boom Potential Energy Recovery of Hydraulic Excavator Working Mechanism. J. Univ. Jinan (Sci. Technol.) 2018, 32, 4. [Google Scholar]
- Ye, Y.; Lin, T.; Ren, H. Research on the potential energy regeneration and utilization in hydraulic based on balance cylinder. Chin. Hydraul. Pneum. 2018, 1, 71–77. [Google Scholar]
- Lin, Y.; Lin, T.; Chen, Q.; Li, Z.; Fu, S.; Ren, H.; Guo, T. Research progress on key technologies of electric construction machinery. Chin. Hydraul. Pneum. 2021, 45, 1. [Google Scholar]
- Casoli, P.; Ricco, L.; Campanini, F.; Bedotti, A. Hydraulic hybrid excavator—Mathematical model validation and energy analysis. Energies 2016, 9, 1002. [Google Scholar] [CrossRef] [Green Version]
- Hao, L.; Fu, K.; Yu, B.; Lou, W.; Ma, G.; Qin, H. Reliability analysis of an incremental digital valve. Chin. Hydraul. Pneum. 2020, 48, 168–171. [Google Scholar]
- Yi, H.; Cha, S. Optimal energy management of the electric excavator using super capacitor. Int. J. Precis. Eng. Manuf. Green Technol. 2019, 8, 151–164. [Google Scholar] [CrossRef]
- Wang, T.; Wang, Q. Efficiency analysis and evaluation of energy-saving pressure compensated circuit for hybrid hydraulic excavator. Autom. Constr. 2014, 47, 62–68. [Google Scholar] [CrossRef]
- Xia, L.; Quan, L.; Ge, L.; Hao, Y. Energy efficiency analysis of integrated drive and energy recuperation system for hydraulic excavator boom. Energy Convers. Manag. 2018, 156, 680–687. [Google Scholar] [CrossRef]
- Zhang, Y. Research on Energy Saving for Hydraulic Excavators Based on Hybrid and Regeneration. Ph.D. Thesis, Zhejiang University, Hangzhou, China, 2006; pp. 27–32. [Google Scholar]
- Yuan, X.; Wu, J. Research on the development of pure electric vehicle power battery technology based on patent analysis. In Proceedings of the IOP Conference Series: Earth and Environmental Science, Changsha, China, 18–20 September 2020; Volume 615, p. 012081. [Google Scholar]
- Yang, Z.; Ravey, A.; Marion-P’era, M.C. Multi-objective energy management for fuel cell electric vehicles using online-learning enhanced Markov speed predictor. Energy Convers Manag. 2020, 213, 112821. [Google Scholar]
- Parikh, D.; Christensen, T.; Li, J. Correlating the influence of porosity, tortuosity, and mass loading on the energy density of LiNi0.6Mn0.2Co0.2O2 cathodes under extreme fast charging (XFC) conditions. J. Power Sources 2020, 474, 228601. [Google Scholar] [CrossRef]
- Chen, M.; Zhao, D. Research on recoverable potential of hydraulic excavator. Mach. Tool Hydraul. 2016, 44, 65–68. [Google Scholar]
- Gong, J.; Zhang, D.; Liu, C.; Zhao, Y.; Hu, P. Power control strategy and performance evaluation of a novel electro-hydraulic energy-saving system. Appl. Energy 2019, 233, 724–734. [Google Scholar] [CrossRef]
- Chen, Z.; Fu, J.; Zhang, X.; Cheng, H.; Quan, L. Electro-hydraulic recovery system of swing braking energy in hydraulic excavator. Mach. Tool Hydraul. 2018, 46, 1–8. [Google Scholar]
- Yao, M.; Wu, W.; Qin, J.; Sun, L. Study on energy recovery system for electro-hydraulic coordinated hydraulic excavator Compound action. Mach. Tool Hydraul. 2018, 46, 54–59. [Google Scholar]
- Lin, T.; Wang, Q.; Hu, B.; Gong, W. Research on the energy regeneration systems for hybrid hydraulic excavators. Autom. Constr. 2010, 19, 1016–1026. [Google Scholar] [CrossRef]
- Hong, J.; Wang, Z.; Ma, F.; Yang, J.; Xu, X.; Qu, C.; Zhang, J.; Shan, T.; Hou, Y.; Zhou, Y. Thermal runaway prognosis of battery systems using the modified multi-scale entropy in real-world electric vehicles. IEEE Trans. Transp. Electrif. 2021, 7, 2269–2278. [Google Scholar] [CrossRef]
- Yang, J.; Zhang, T.; Zhang, H.; Meng, Z. Research on the starting acceleration characteristics of a new mechanical–electric–hydraulic power coupling electric vehicle. Energies 2020, 13, 6279. [Google Scholar] [CrossRef]
- Yang, J.; Zhang, T.; Hong, J.; Zhang, H.; Zhao, Q.; Meng, Z. Research on driving control strategy and fuzzy logic optimization of a novel mechatronics-electro-hydraulic power coupling electric vehicle. Energy 2021, 233, 121221. [Google Scholar] [CrossRef]
- Hong, J.; Wang, Z.; Chen, W.; Wang, L.; Lin, P.; Qu, C. Online accurate state of health estimation for battery systems on real-world electric vehicles with variable driving conditions considered. J. Clean. Prod. 2021, 294, 125814. [Google Scholar] [CrossRef]
- Geng, Y.; Yang, J.; Quan, L. Power matching of hybrid excavator based on load balance. Chin. Hydraul. Pneum. 2017, 2, 63–69. [Google Scholar]
- Altare, G.; Vacca, A. A design solution for efficient and compact electrohydraulic actuators. Procedia Eng. 2015, 106, 8–16. [Google Scholar] [CrossRef] [Green Version]
- Shi, J.; Quan, L.; Zhang, X.; Xiong, X. Electro-hydraulic velocity and position control based on independent metering valve control in mobile construction equipment. Autom. Con. Struct. 2018, 94, 73–84. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Component | Value | Remark and Unit |
|---|---|---|
| Hydraulic cylinder | 0.055 × 0.03 × 0.8 | Piston dia. × rod dia. × stroke length (m) |
| Hydraulic pump/motor | 20 | Displacement (mL/r) |
| Low pressure accumulator | 12–18 | Working pressure (MPa) |
| High pressure accumulator | 26–38 | Working pressure (MPa) |
| Motor | 10 | Rated power (kW) |
| Battery | 35 | Maximum power (kW) |
| Load force | 50 | kN |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, L.; Zhang, T.; Wu, K.; Lu, L.; Lin, L.; Xu, H. Design and Research on Electro-Hydraulic Drive and Energy Recovery System of the Electric Excavator Boom. Energies 2022, 15, 4757. https://doi.org/10.3390/en15134757
Li L, Zhang T, Wu K, Lu L, Lin L, Xu H. Design and Research on Electro-Hydraulic Drive and Energy Recovery System of the Electric Excavator Boom. Energies. 2022; 15(13):4757. https://doi.org/10.3390/en15134757
Chicago/Turabian StyleLi, Lin, Tiezhu Zhang, Kaiwei Wu, Liqun Lu, Lianhua Lin, and Haigang Xu. 2022. "Design and Research on Electro-Hydraulic Drive and Energy Recovery System of the Electric Excavator Boom" Energies 15, no. 13: 4757. https://doi.org/10.3390/en15134757