
A Hybrid Maximum Power Point Tracking Method without Oscillations in Steady-State for Photovoltaic Energy Systems †

Abstract
:1. Introduction
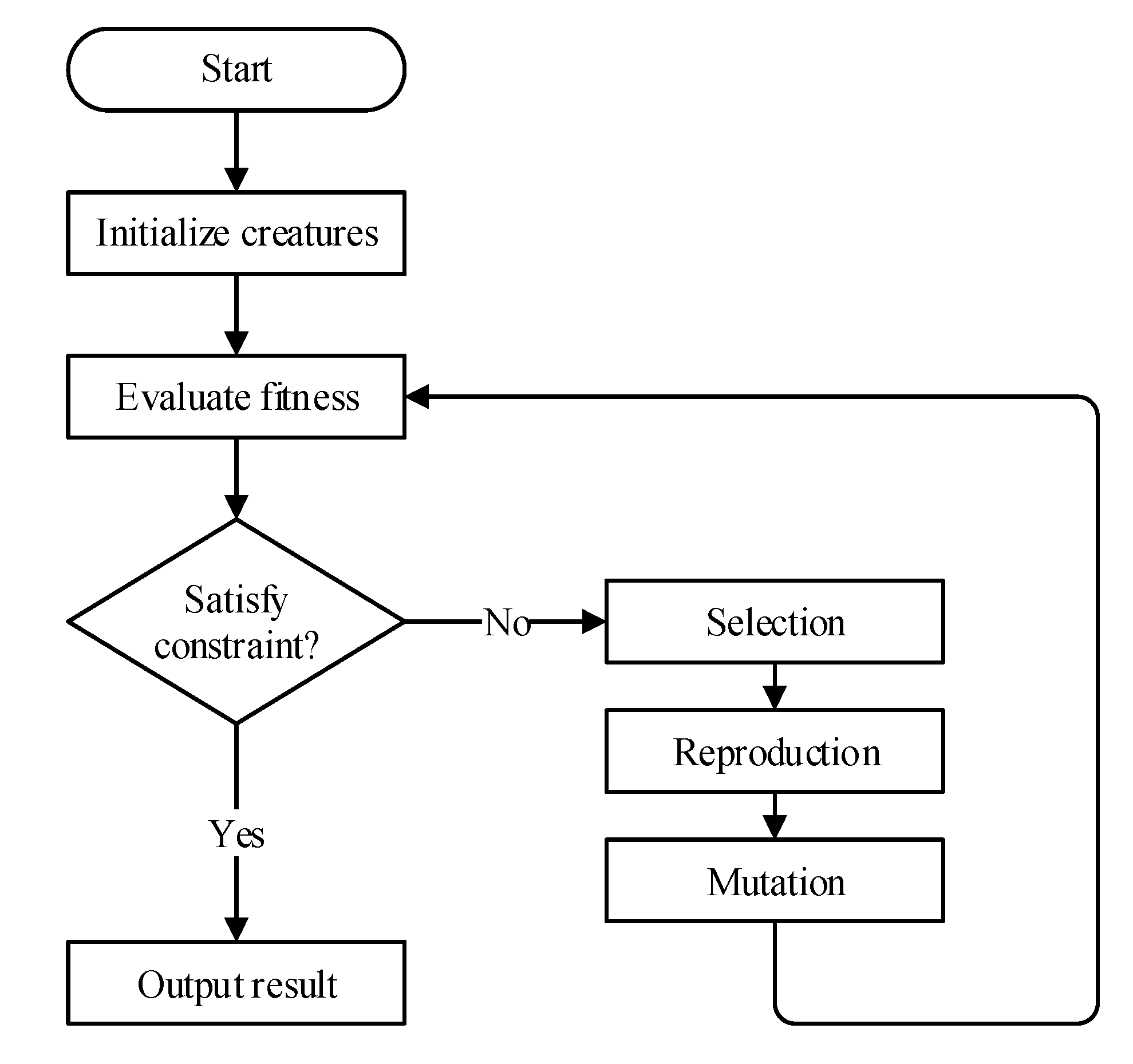
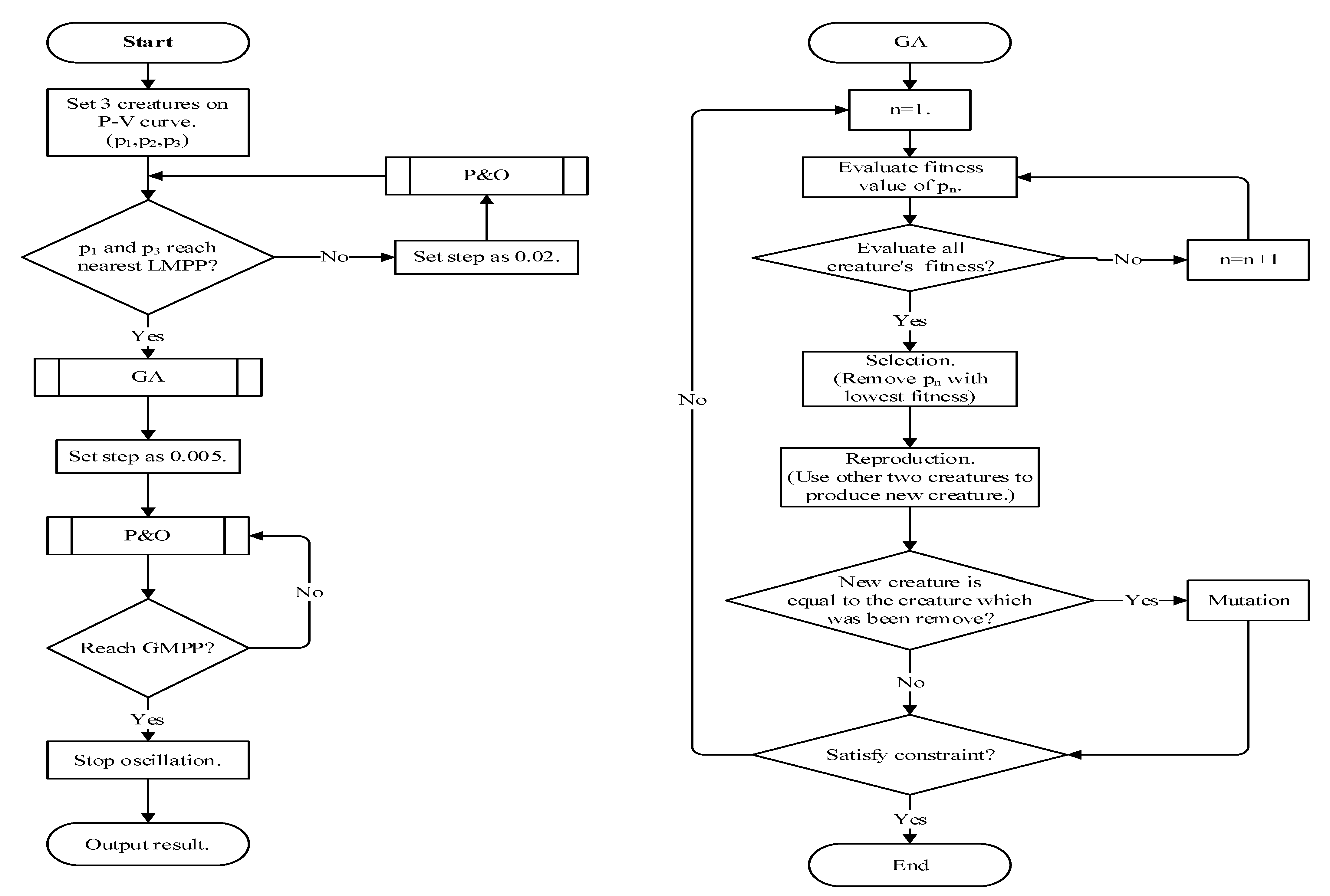
2. Genetic Algorithm
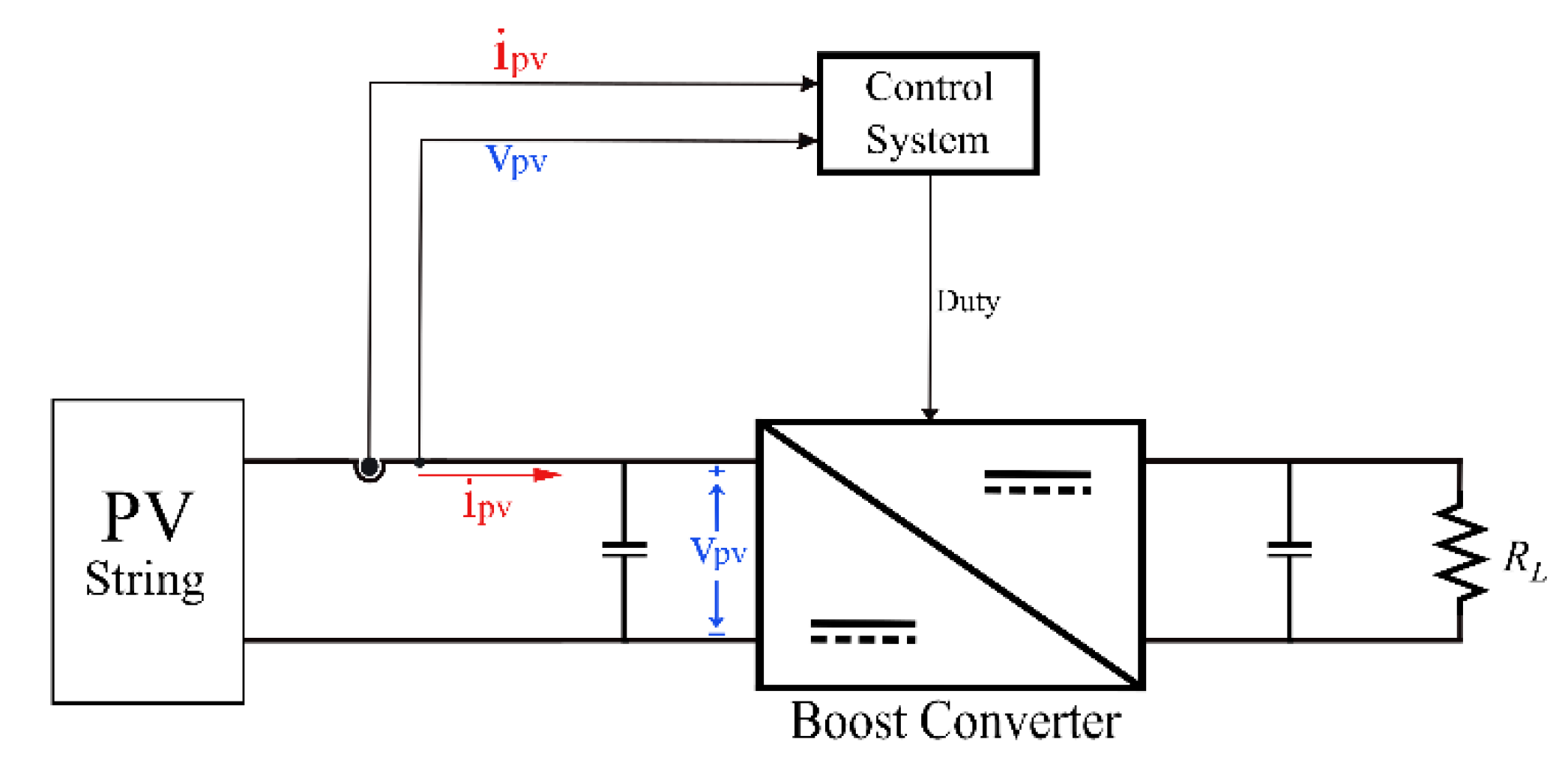
3. Solar System Module
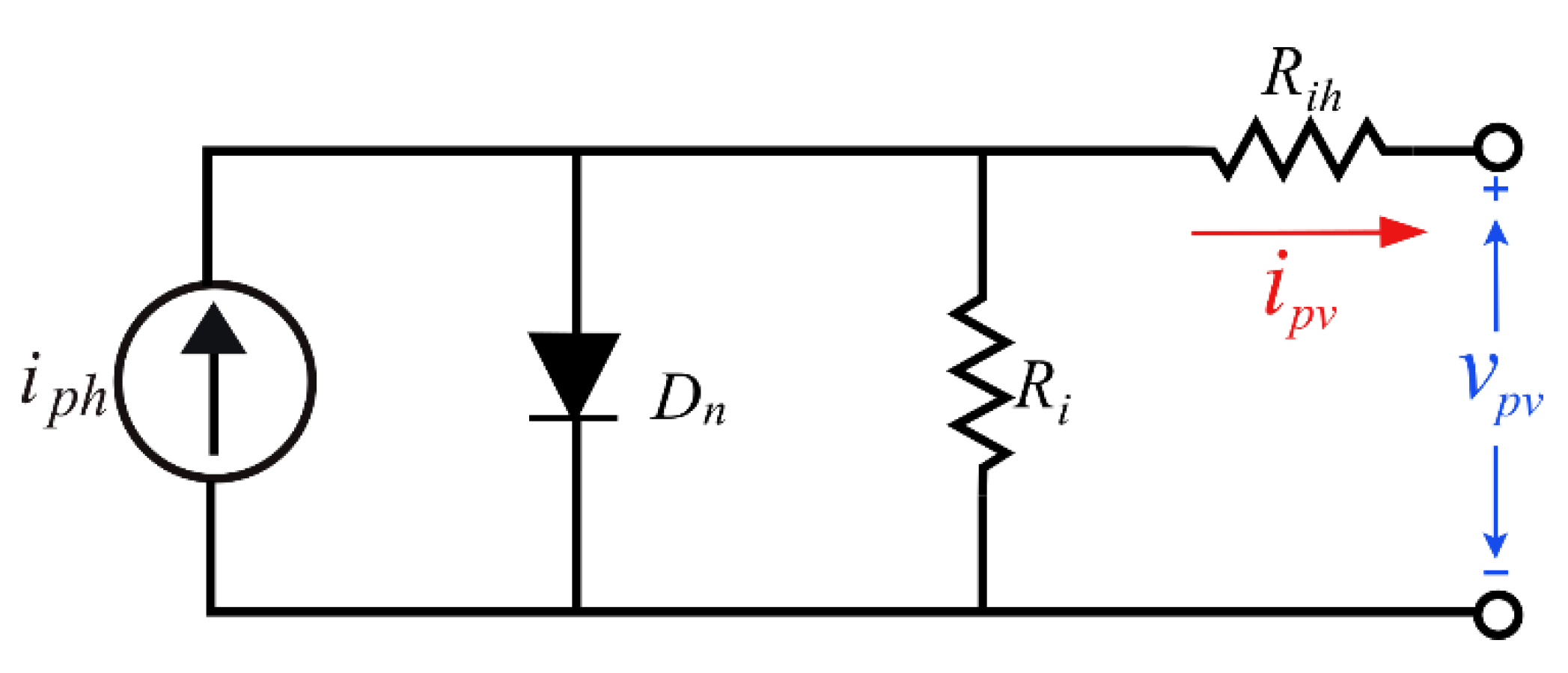
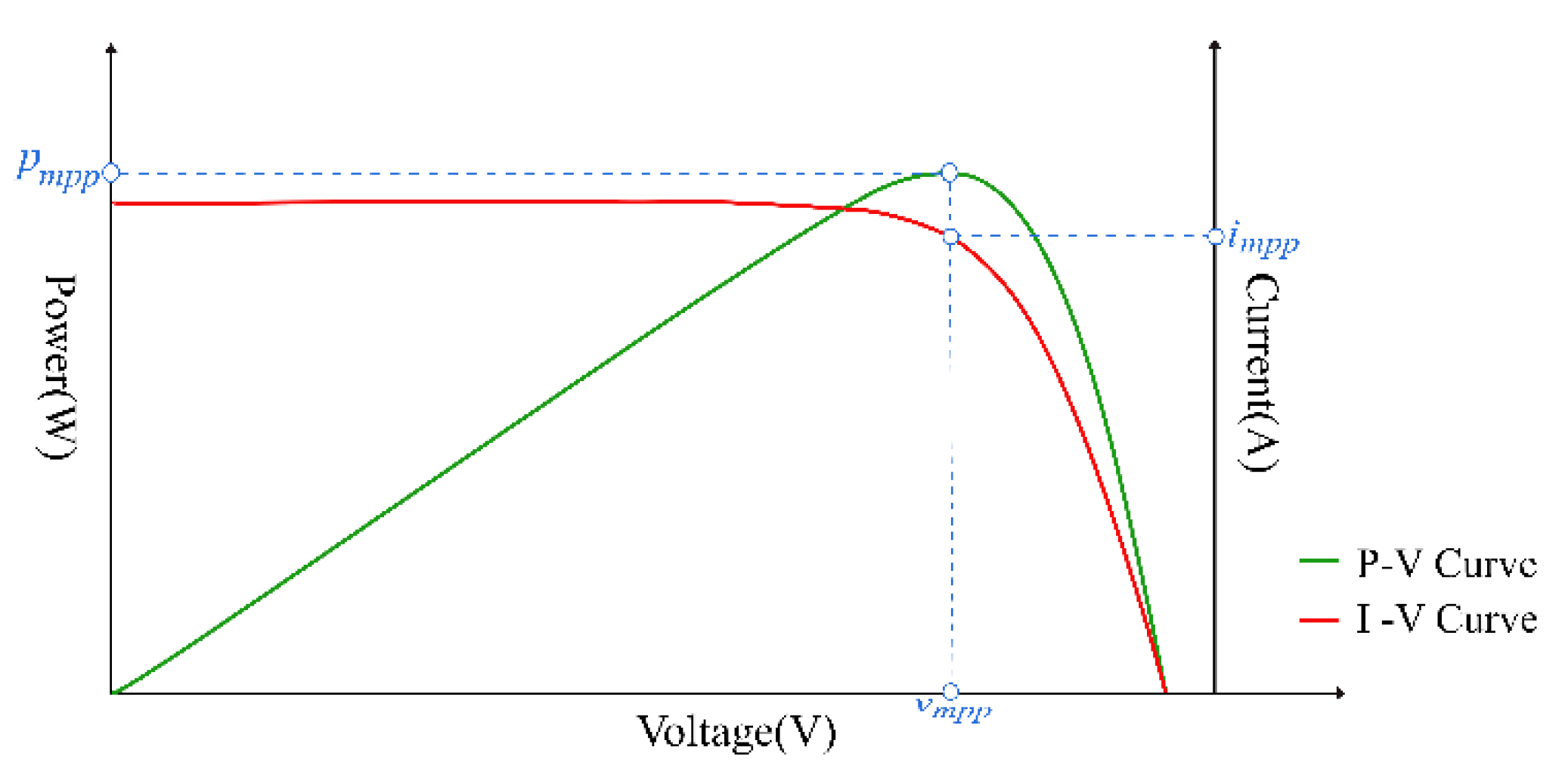
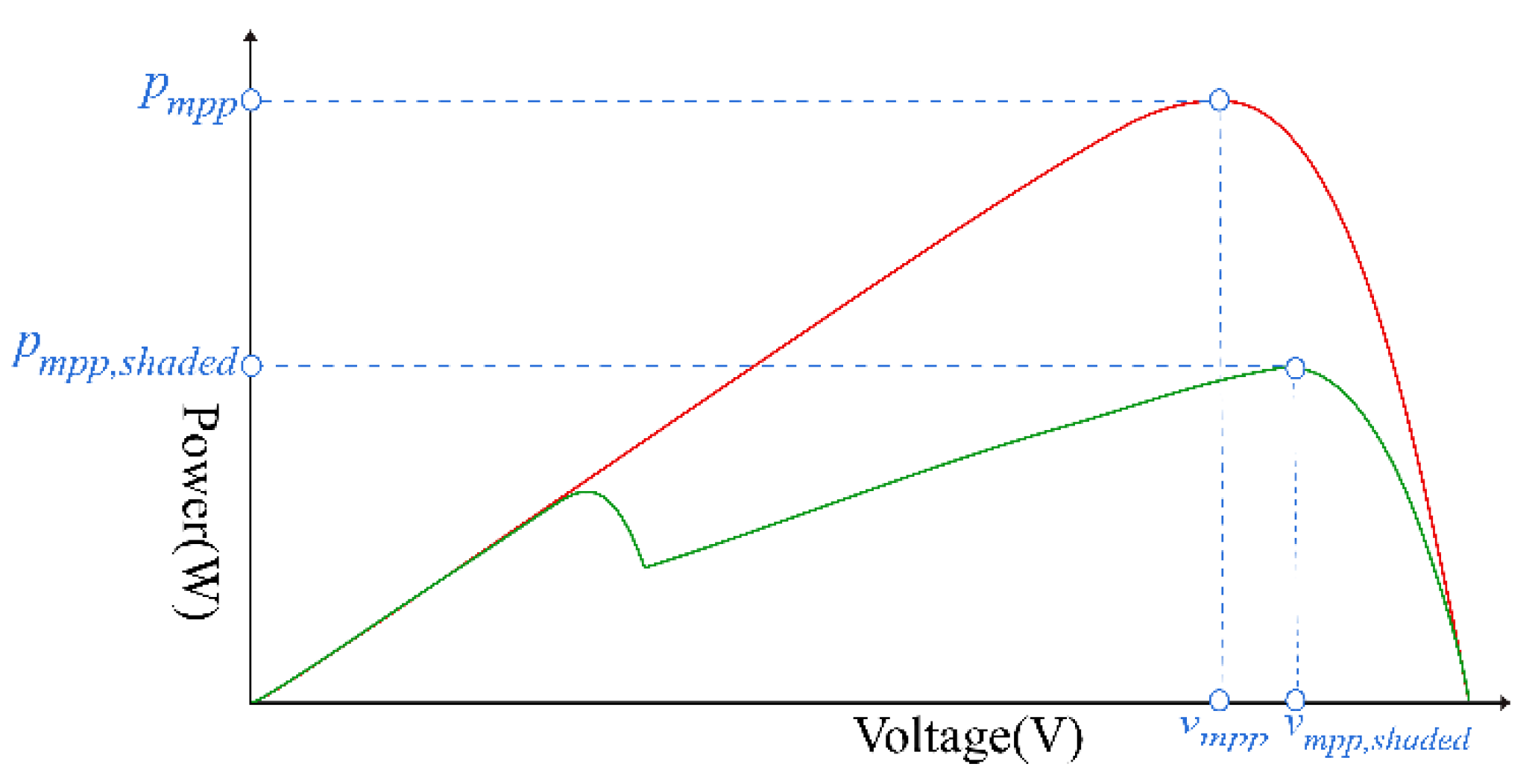
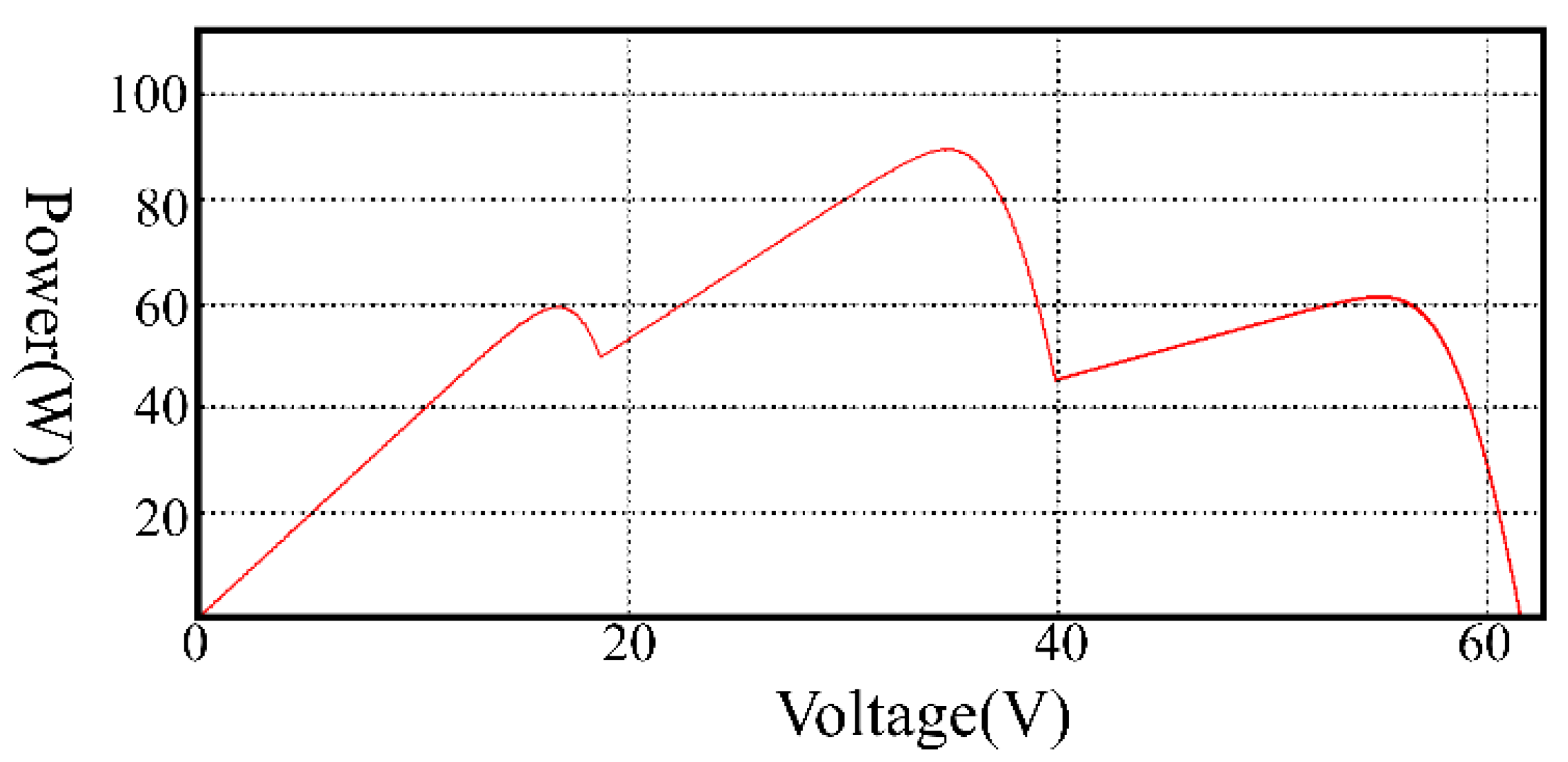
3.1. Basic Characteristics of PV Module
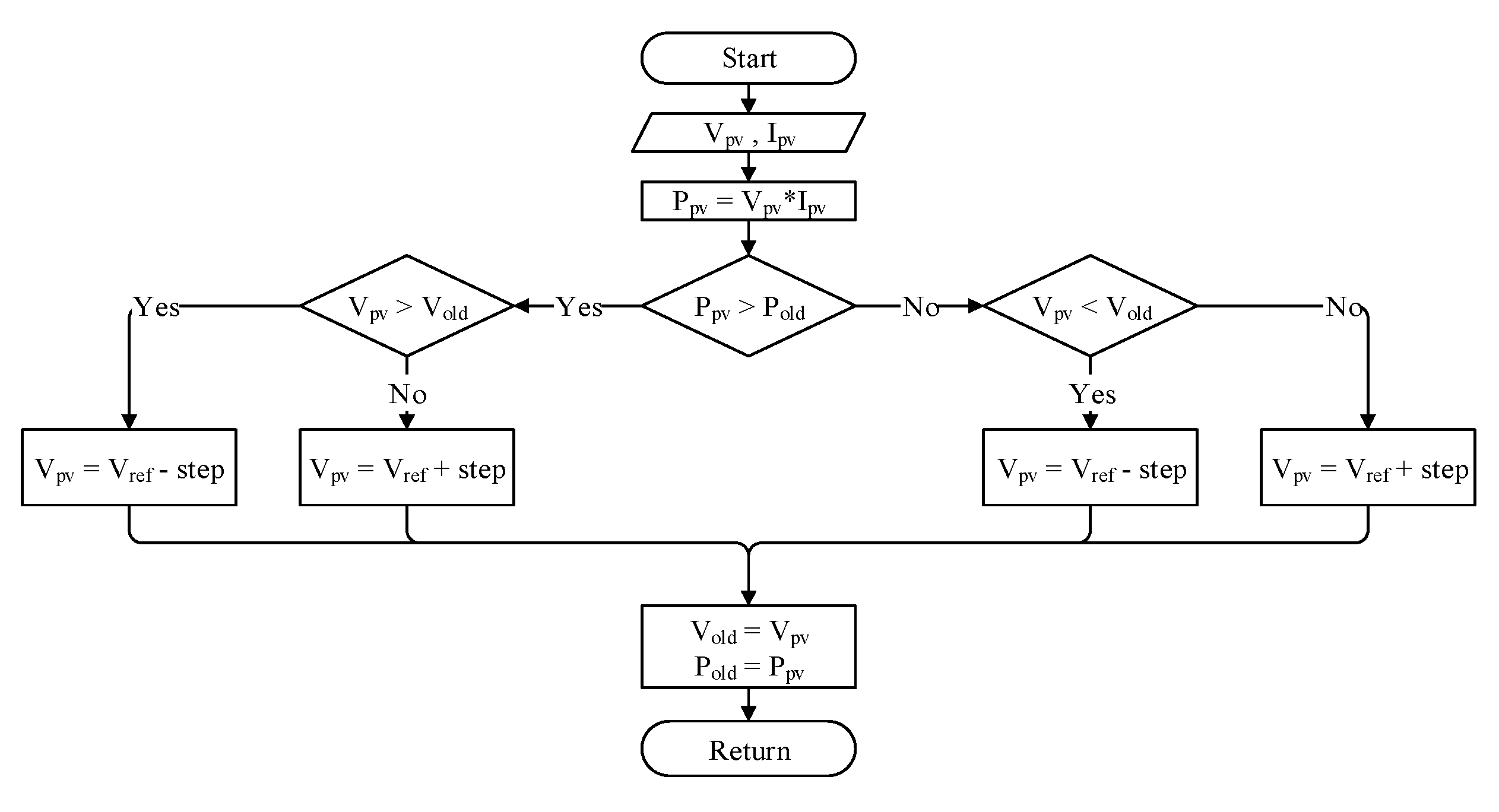
3.2. Conventional P&O
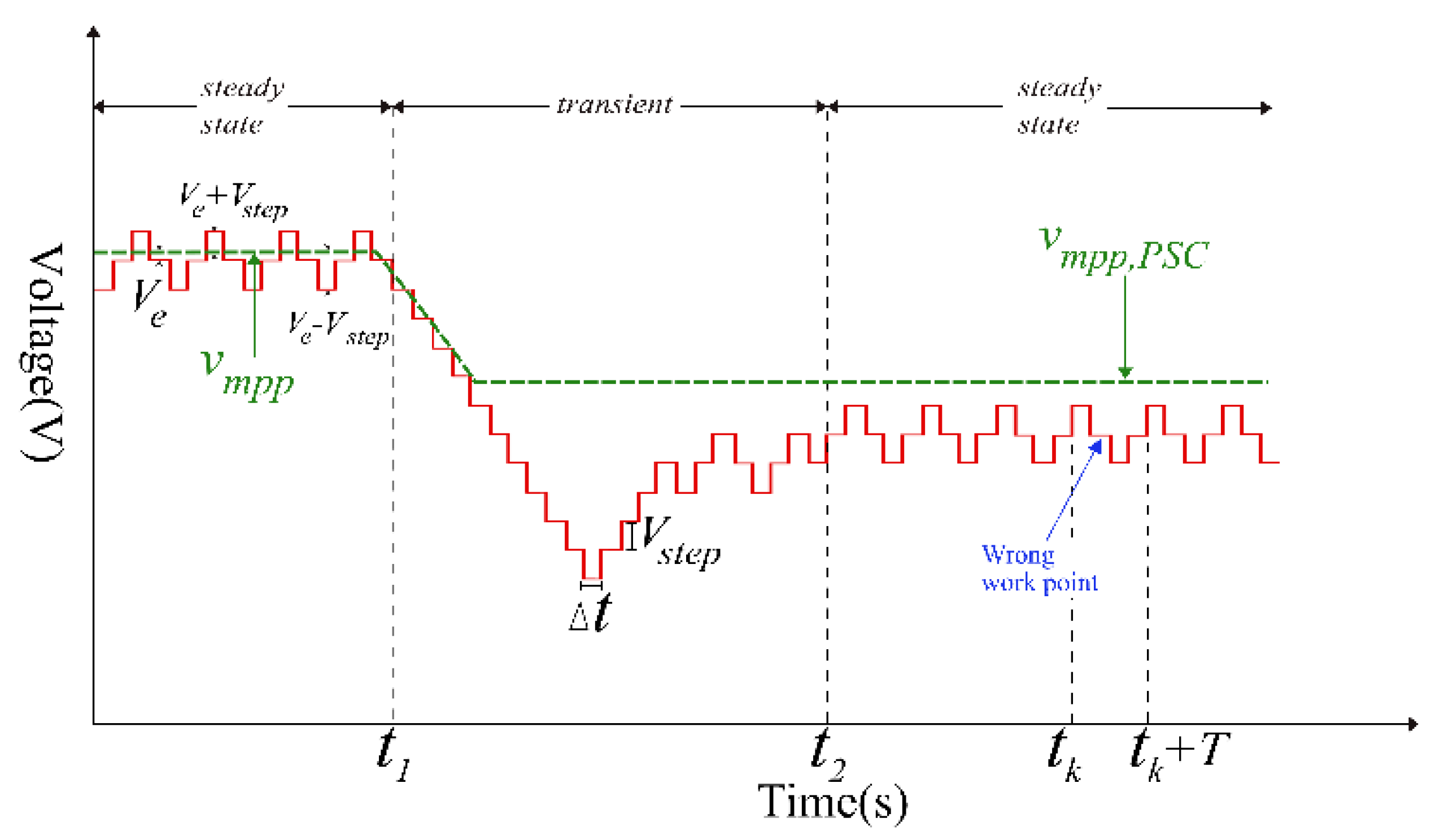
3.3. The Loss Due to Steady-State Oscillations
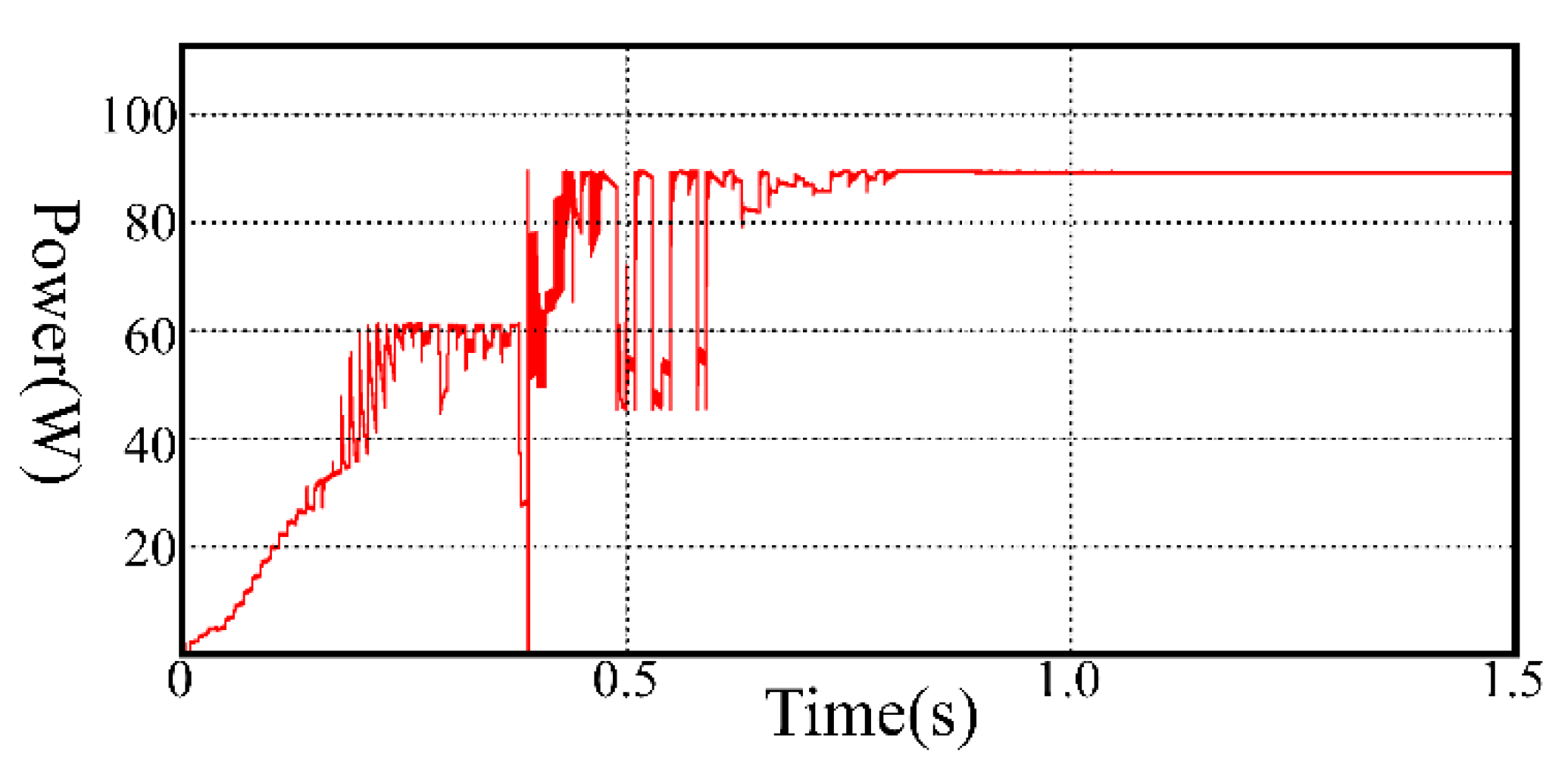
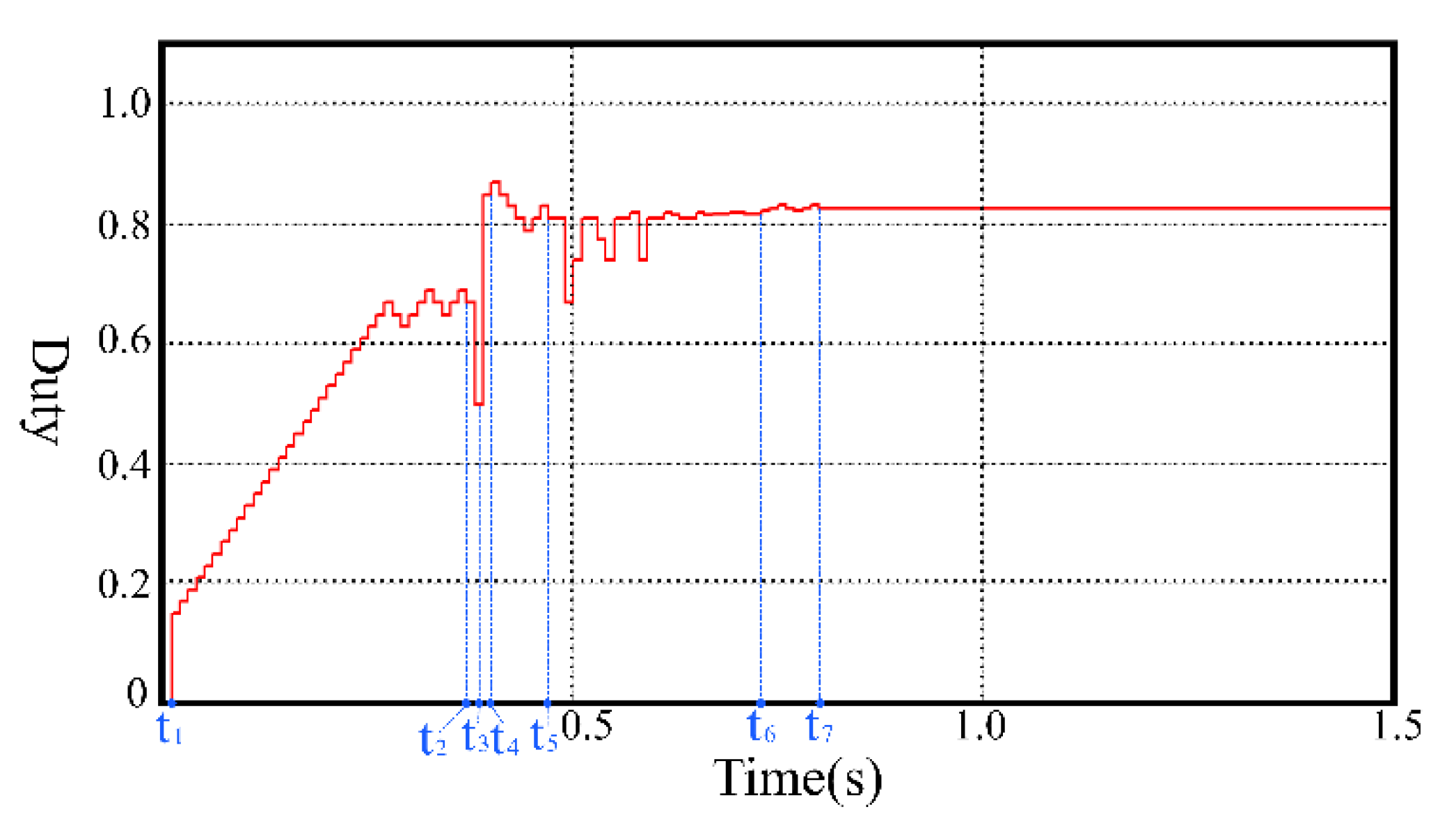
4. Simulations
5. Experimental Results and Discussions
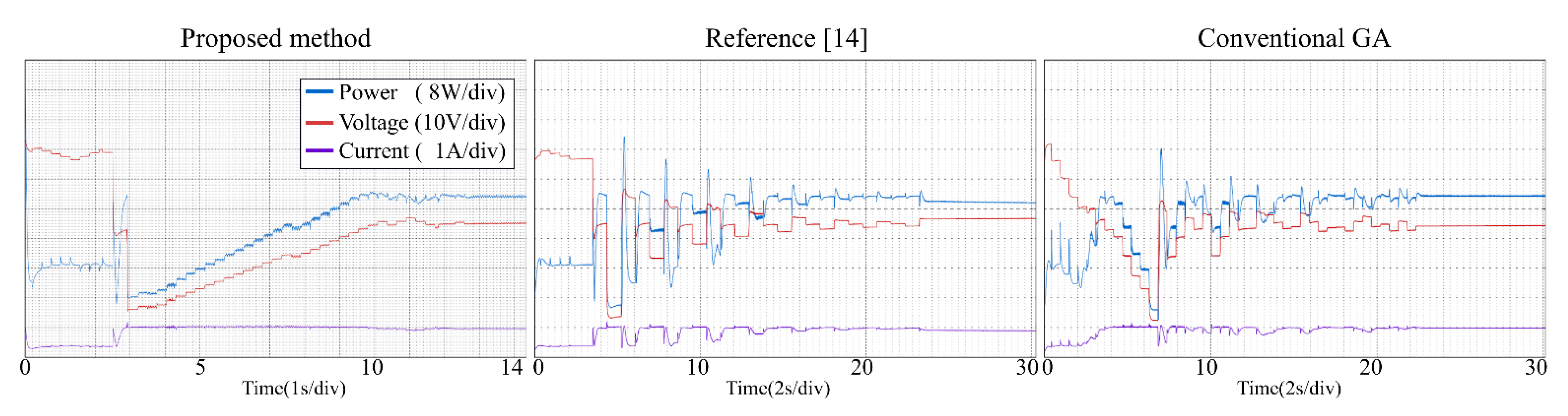
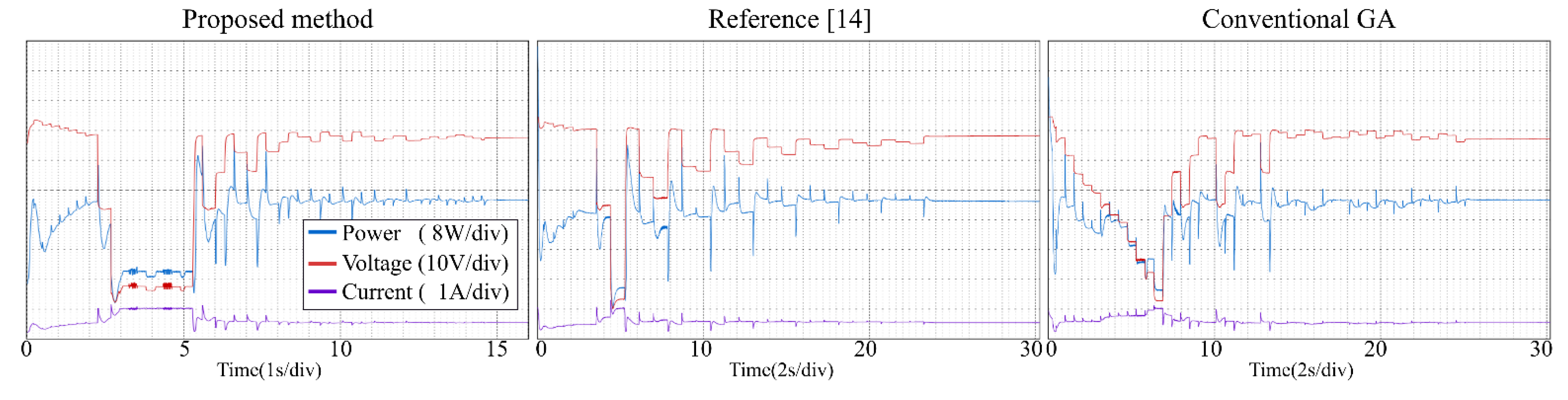
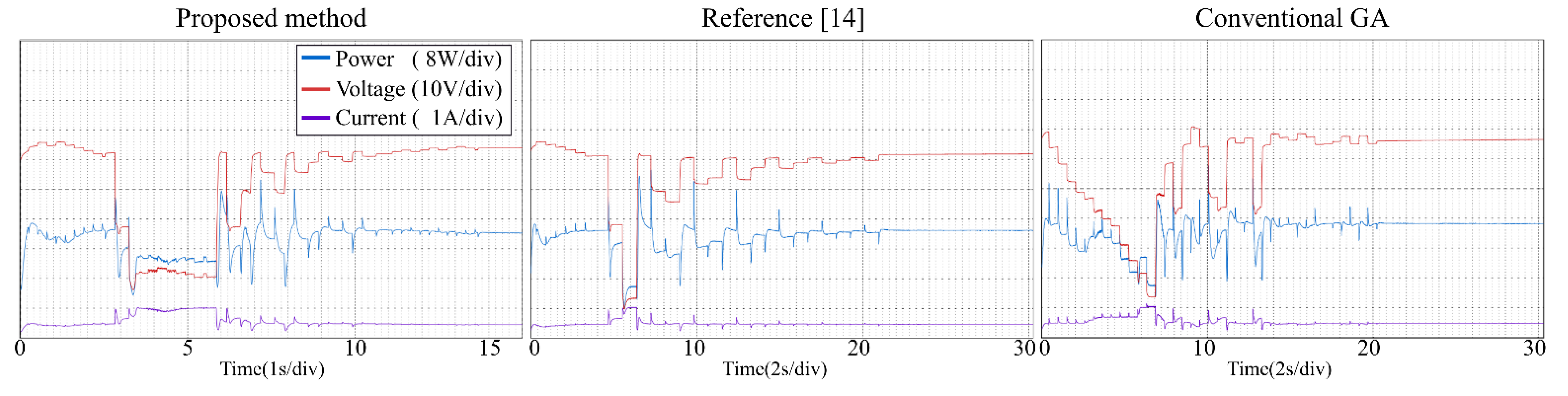
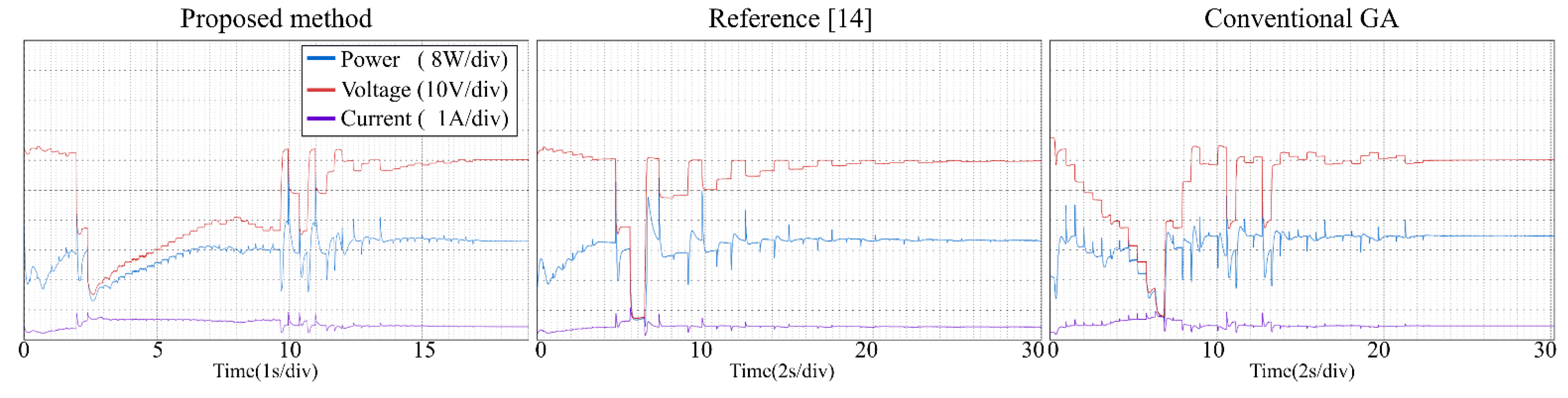
5.1. Experimental Results
5.2. Discussions
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Elbaset, A.A.; Ali, H.; Sattar, M.A.; Khaled, M. Implementation of a modified perturb and observe maximum power point tracking algorithm for photovoltaic system using an embedded microcontroller. IET Renew. Power Gener. 2016, 10, 551–560. [Google Scholar] [CrossRef]
- Kollimalla, K.; Mishra, M. Adaptive perturb & observe MPPT algorithm for photovoltaic system. In Proceedings of the 2013 IEEE Power and Energy Conference at Illinois (PECI), Urbana, IL, USA, 22–23 February 2013; pp. 42–47. [Google Scholar]
- Killi, M.; Samanta, S. Modified perturb and observe MPPT algorithm for drift avoidance in photovoltaic systems. IEEE Trans. Ind. Electron. 2015, 99, 1–10. [Google Scholar] [CrossRef]
- Faranda, R.; Leva, S. Energy comparison of MPPT techniques for PV systems. WSEAS Trans. Power Syst. 2008, 3, 446–455. [Google Scholar]
- Mahtab, K.; Mohammad, H.J. A Combinational Maximum Power Point Tracking Algorithm in Photovoltaic Systems under Partial Shading Conditions. In Proceedings of the 4th Iranian Conference on Renewable Energy and Distributed Generation, Iran, Mashhad, 2–3 March 2016. [Google Scholar]
- Subudhi, B.; Pradhan, R. A comparative study on maximum power point tracking techniques for photovoltaic power systems. IEEE Trans. Sustain. Energy 2013, 4, 89–98. [Google Scholar] [CrossRef]
- Petrone, G.; Spagnuolo, G.; Vitelli, M. An analog technique for distributed MPPT PV applications. IEEE Trans. Ind. Electron. 2012, 59, 4713–4722. [Google Scholar] [CrossRef]
- Sreeraj, E.; Chatterjee, K.; Bandyopadhyay, S. One-cycle-controlled single-stage single-phase voltage-sensorless grid-connected PV system. IEEE Trans. Ind. Electron. 2013, 60, 1216–1224. [Google Scholar] [CrossRef]
- Sher, H.A.; Murtaza, A.F.; Noman, A.; Addoweesh, K.E.; Al-Haddad, K.; Chiaberge, M. A New Sensorless Hybrid MPPT Algorithm Based on Fractional Short-Circuit Current Measurement and P&O MPPT. IEEE Trans. Sustain. Energy 2015, 6, 1426–1434. [Google Scholar]
- Kermadi, M.; Salam, Z.; Eltamaly, A.M.; Ahmed, J.; Mekhilef, S.; Larbes, C.; Berkouk, E. Recent developments of MPPT techniques for PV systems under partial shading conditions: A critical review and performance evaluation. IET Renew. Power Gener. 2020, 14, 3401–3417. [Google Scholar] [CrossRef]
- Blanes, J.; Toledo, F.; Montero, S.; Garrigos, A. In-site real-time photovoltaic I-V curves and maximum power point estimator. IEEE Trans. Power Electron. 2013, 28, 1234–1240. [Google Scholar] [CrossRef]
- Rai, A.K.; Kaushika, N.D.; Singh, B.; Agarwal, N. Simulation model of ANN based maximum power point tracking controller for solar PV system. Solar Energy Mater. Solar Cells 2011, 95, 773–778. [Google Scholar] [CrossRef]
- Ishaque, K.; Salam, Z.; Amjad, M.; Mekhilef, S. An Improved Particle Swarm Optimization (PSO)–Based MPPT for PV With Reduced Steady-State Oscillation. IEEE Trans. Power Electron. 2012, 27, 3627. [Google Scholar] [CrossRef]
- Lian, K.L.; Jhang, J.H.; Tian, I.S. A Maximum Power Point Tracking Method Based on Perturb-and-Observe Combined with Particle Swarm Optimization. IEEE J. Photovolt. 2014, 4, 626–633. [Google Scholar] [CrossRef]
- Sulthana, N.; Babu, K.T.H. A MPPT Controlled Switched Capacitor and Regenerative Boost Converter for PV Systems. In Proceedings of the 2020 International Conference on Futuristic Technologies in Control Systems & Renewable Energy (ICFCR), Malappuram, India, 23–24 September 2020; pp. 1–8. [Google Scholar]
- Ji, Y.; Wu, B.; Hou, Y.; Ding, A. A MZ Modulator Bias Control System Based on Variable Step P&O Algorithm. IEEE Photonics Technol. Lett. 2020, 32, 1473–1476. [Google Scholar]
- Sarika, P.E.; Jacob, J.; Mohammed, S.; Paul, S. A Novel Hybrid Maximum Power Point Tracking Technique with Zero Oscillation Based on P&O Algorithm. Int. J. Renew. Energy Res. 2020, 10, 1962–1973. [Google Scholar]
- Alajmi, B.N.; Ahmed, K.H.; Finney, S.J.; Williams, B.W. Fuzzy-logic-control approach of a modified hill-climbing method for maximum power point in microgrid standalone photovoltaic system. IEEE Trans. Power Electron. 2011, 26, 1022–1030. [Google Scholar] [CrossRef]
- Paz, F.; Ordonez, M. Zero Oscillation and Irradiance Slope Tracking for Photovoltaic MPPT. IEEE Trans. Ind. Electron. 2014, 61, 6138–6147. [Google Scholar] [CrossRef]
- Danandeh, M.A.; Mousavi, S.M.G. Comparative and comprehensive review of maximum power point tracking methods for PV cells. Renew. Sustain. Energy Rev. 2018, 82, 2743–2767. [Google Scholar] [CrossRef]
- Hua, C.-C.; Chen, Y. Modified perturb and observe MPPT with zero oscillation in steady-state for PV systems under partial shaded conditions. In Proceedings of the IEEE Conference on Energy Conversion (CENCON), Kuala Lumpur, Malaysia, 30–31 October 2017; pp. 5–9. [Google Scholar]
- Liu, Y.H.; Chen, J.H.; Huang, J.W. A review of maximum power point tracking techniques for use in partially shaded conditions. Renew. Sustain. Energy Rev. 2015, 41, 436–453. [Google Scholar] [CrossRef]
- Bizon, N. Global Maximum Power Point Tracking (GMPPT) of Photovoltaic array using the Extremum Seeking Control (ESC): A review and a new GMPPT ESC scheme. Renew. Sustain. Energy Rev. 2016, 57, 524–539. [Google Scholar] [CrossRef]
- Bidram, A.; Davoudi, A.; Balog, R.S. Control and Circuit Techniques to Mitigate Partial Shading Effects in Photovoltaic Arrays. IEEE J. Photovolt. 2012, 2, 532–546. [Google Scholar] [CrossRef]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Circuit Parameters | Value |
|---|---|
| Inductance Switch Frequency | 500 μH |
| 100 k Hz | |
| Output capacitance Mode of operation | 22 μF |
| CCM |
| Parameters | Value |
|---|---|
| Open-circuit voltage Shirt-circuit current | 26.74 V |
| 1.03 A | |
| Maximum output power Maximum power point | 21.31 W |
| 21.97 V |
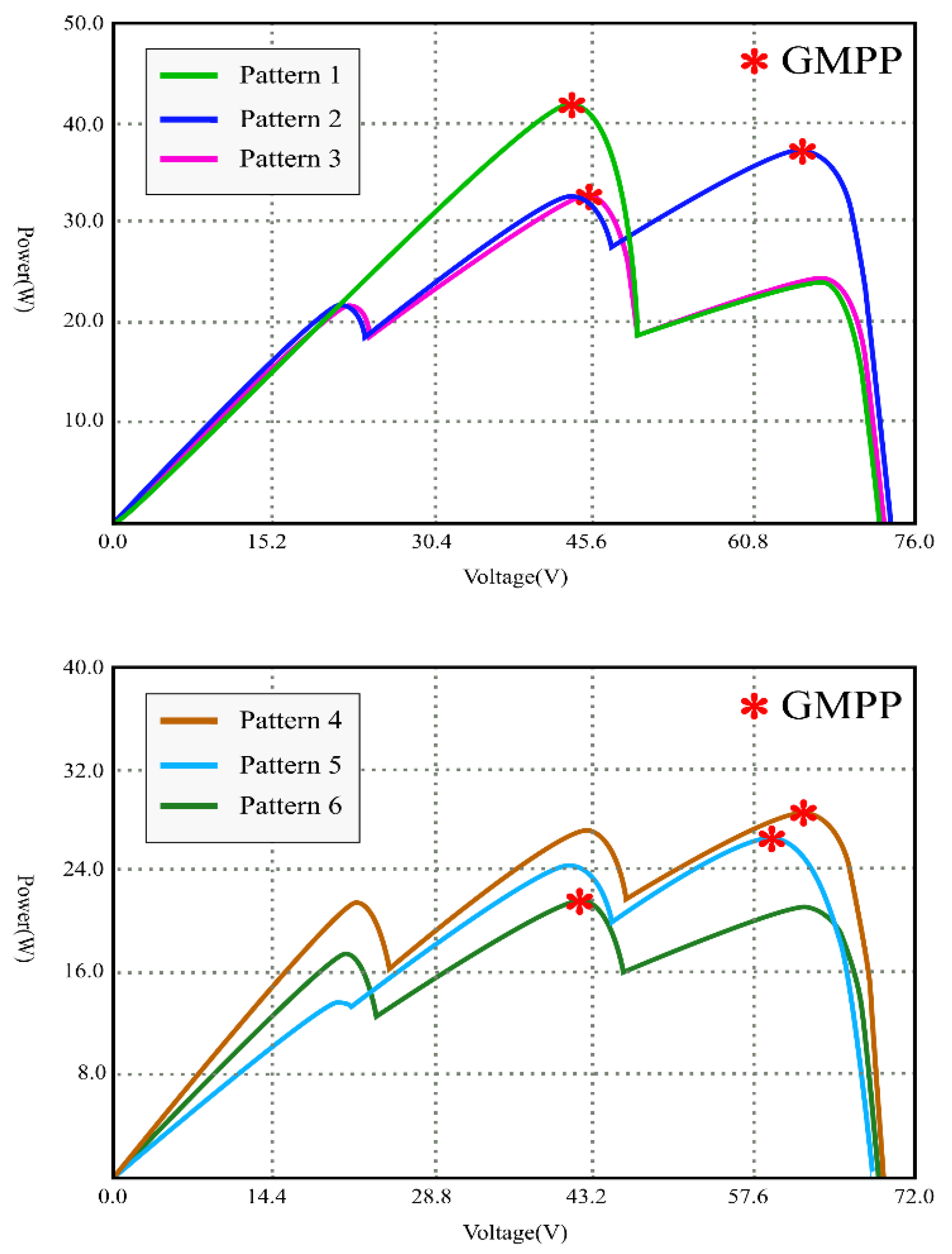
| Pattern | T (°C) | G (W/m2) | Vmpp (V) | Pmpp (W) | Resolution (%) |
|---|---|---|---|---|---|
| 1 | 25 | 1000, 1000, 300 | 45.00 | 42.96 | 43.2 |
| 2 | 1000, 700, 500 | 67.50 | 37.40 | 11.6 | |
| 3 | 1000, 700, 300 | 46.18 | 32.60 | 24.74 | |
| 4 | 50 | 1000, 600, 400 | 63.91 | 28.40 | 3.45 |
| 5 | 700, 600, 400 | 60.25 | 26.75 | 8.41 | |
| 6 | 900, 500, 300 | 40.90 | 22.06 | 1.6 |
| MPPT Algorithm | Track GMPP | Steady-State Oscillation | Implementation |
|---|---|---|---|
| Proposed method | Yes | (Almost)zero | Easy |
| Reference [14] | Yes | low | Difficult |
| Conventional GA | Yes | low | Middle |
| MPPT Algorithm | Pattern 1 | Pattern 2 | Pattern 3 | ||||||
|---|---|---|---|---|---|---|---|---|---|
| Power (W) | Tracking Time (s) | Tracking Efficiency | Power (W) | Tracking Time (s) | Tracking Efficiency | Power (W) | Tracking Time (s) | Tracking Efficiency | |
| Proposed method | 42.90 | 12 | 99.8% | 37.38 | 15 | 99.9% | 32.56 | 15 | 99.8% |
| Reference [14] | 41.97 | 24 | 97.7% | 37.23 | 24 | 99.5% | 32.36 | 24 | 99.2% |
| Conventional GA | 42.30 | 23 | 98.4% | 37.38 | 26 | 99.9% | 32.38 | 26 | 99.3% |
| MPPT Algorithm | Pattern 4 | Pattern 5 | Pattern 6 | ||||||
|---|---|---|---|---|---|---|---|---|---|
| Power (W) | Tracking Time (s) | Tracking Efficiency | Power (W) | Tracking Time (s) | Tracking Efficiency | Power (W) | Tracking Time (s) | Tracking Efficiency | |
| Proposed method | 28. | 14 | 99.8% | 26.73 | 16 | 99.9% | 22.06 | 16 | 99.9% |
| Reference [14] | 28.15 | 22 | 99.1% | 26.73 | 28 | 99.9% | 21.43 | 26 | 97.1% |
| Conventional GA | 28.30 | 21 | 99.6% | 26.71 | 23 | 99.8% | 20.91 | 22 | 94.7% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hua, C.-C.; Zhan, Y.-J. A Hybrid Maximum Power Point Tracking Method without Oscillations in Steady-State for Photovoltaic Energy Systems. Energies 2021, 14, 5590. https://doi.org/10.3390/en14185590
Hua C-C, Zhan Y-J. A Hybrid Maximum Power Point Tracking Method without Oscillations in Steady-State for Photovoltaic Energy Systems. Energies. 2021; 14(18):5590. https://doi.org/10.3390/en14185590
Chicago/Turabian StyleHua, Chih-Chiang, and Yu-Jun Zhan. 2021. "A Hybrid Maximum Power Point Tracking Method without Oscillations in Steady-State for Photovoltaic Energy Systems" Energies 14, no. 18: 5590. https://doi.org/10.3390/en14185590