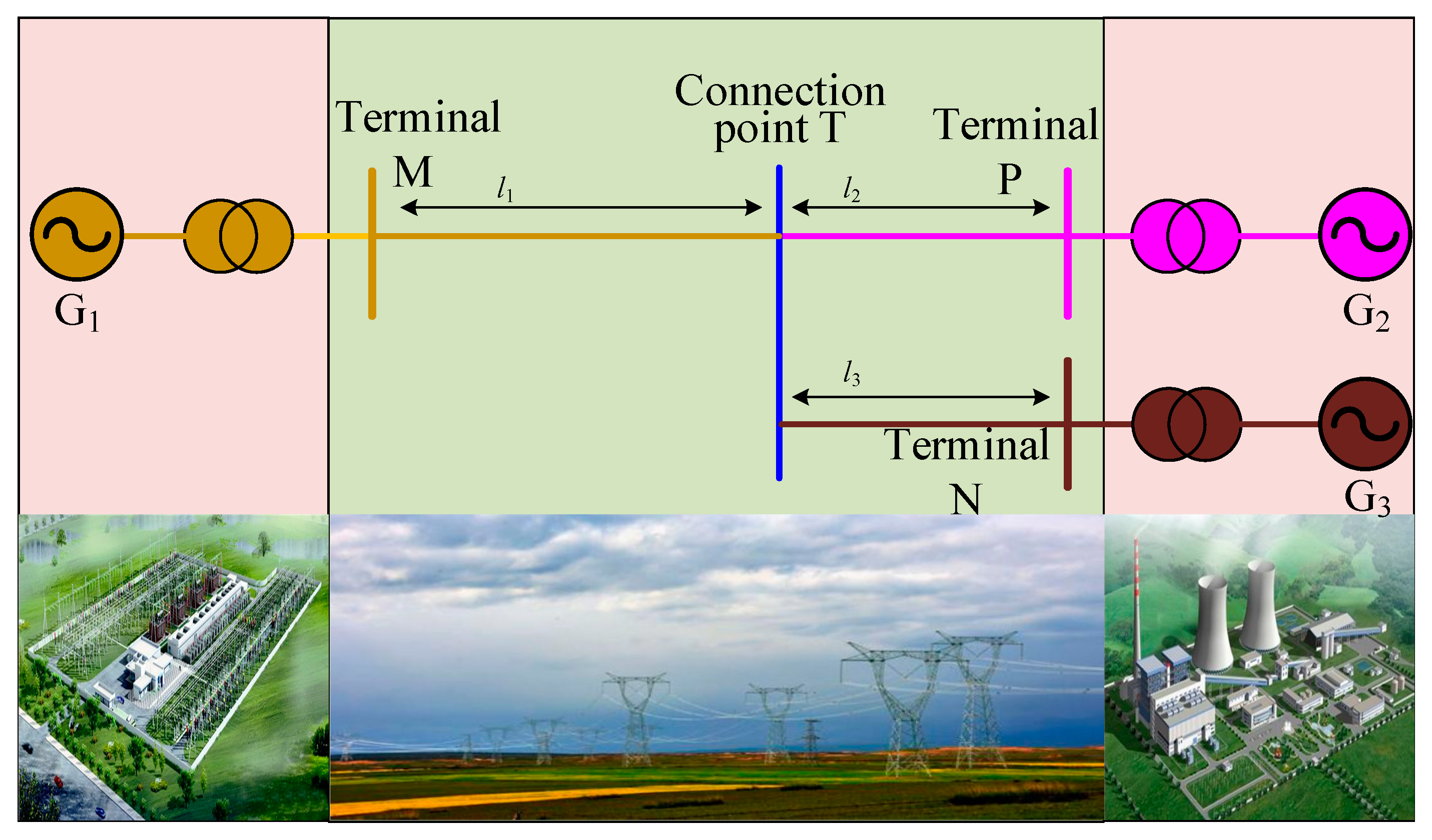
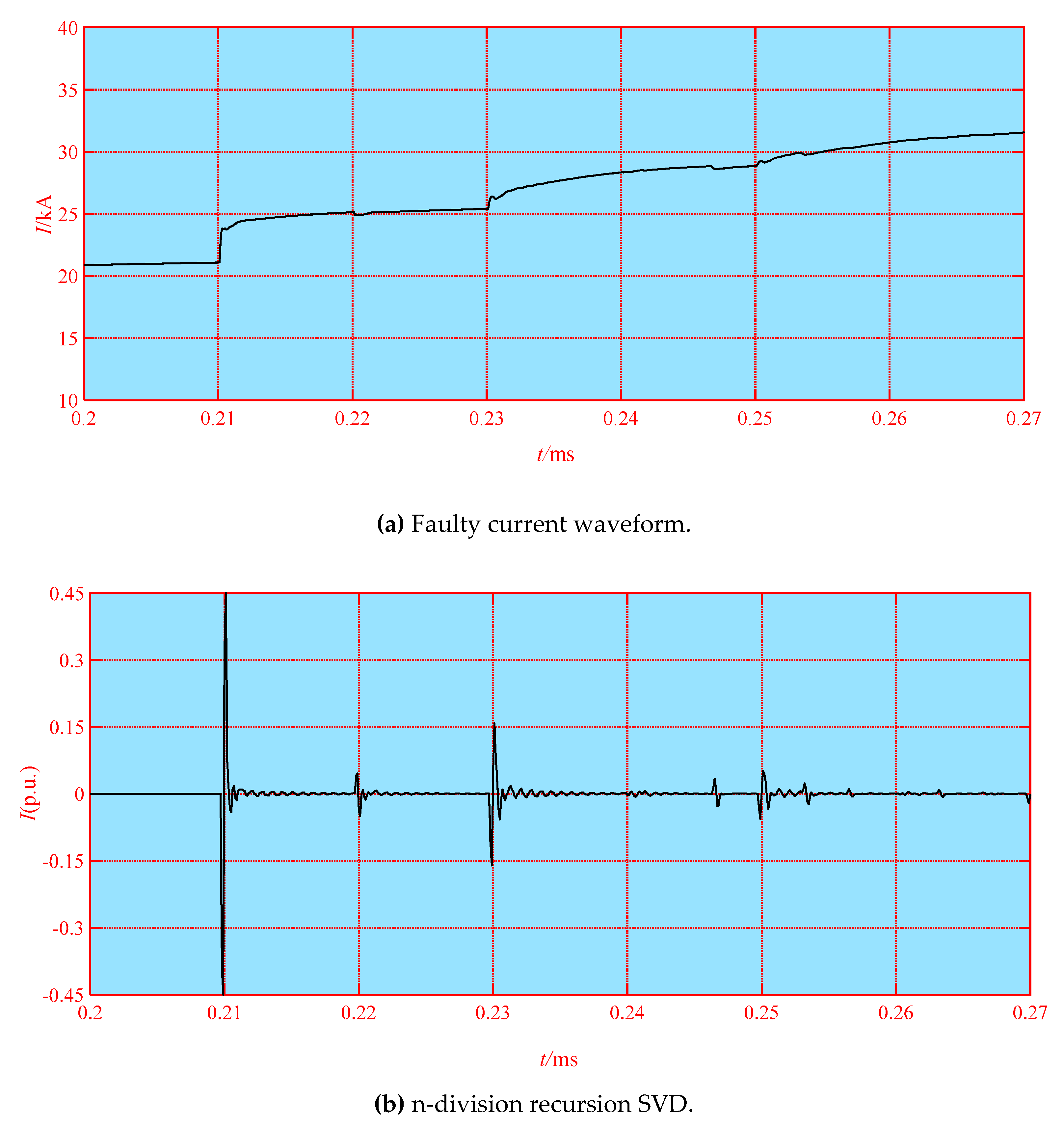
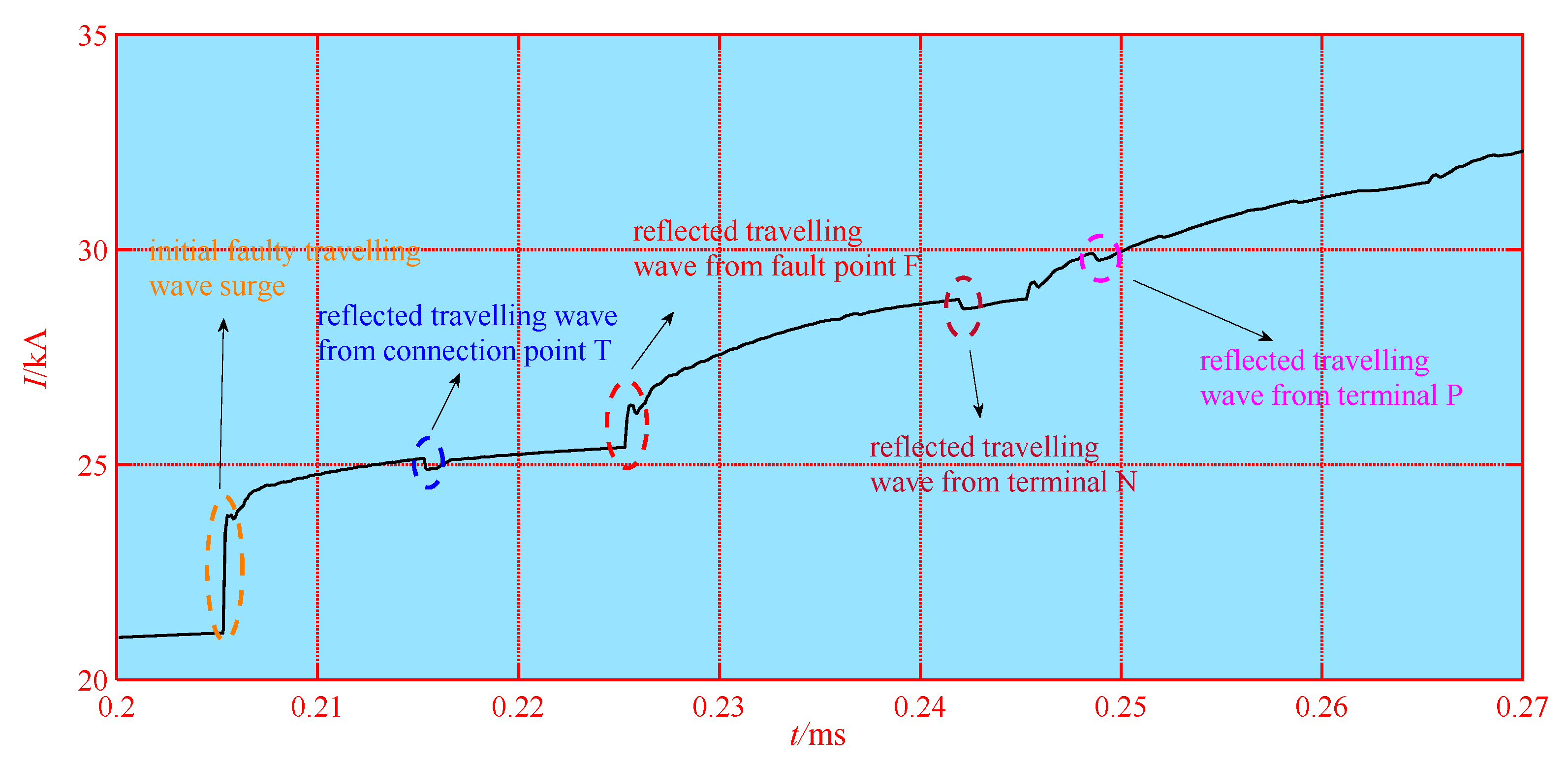
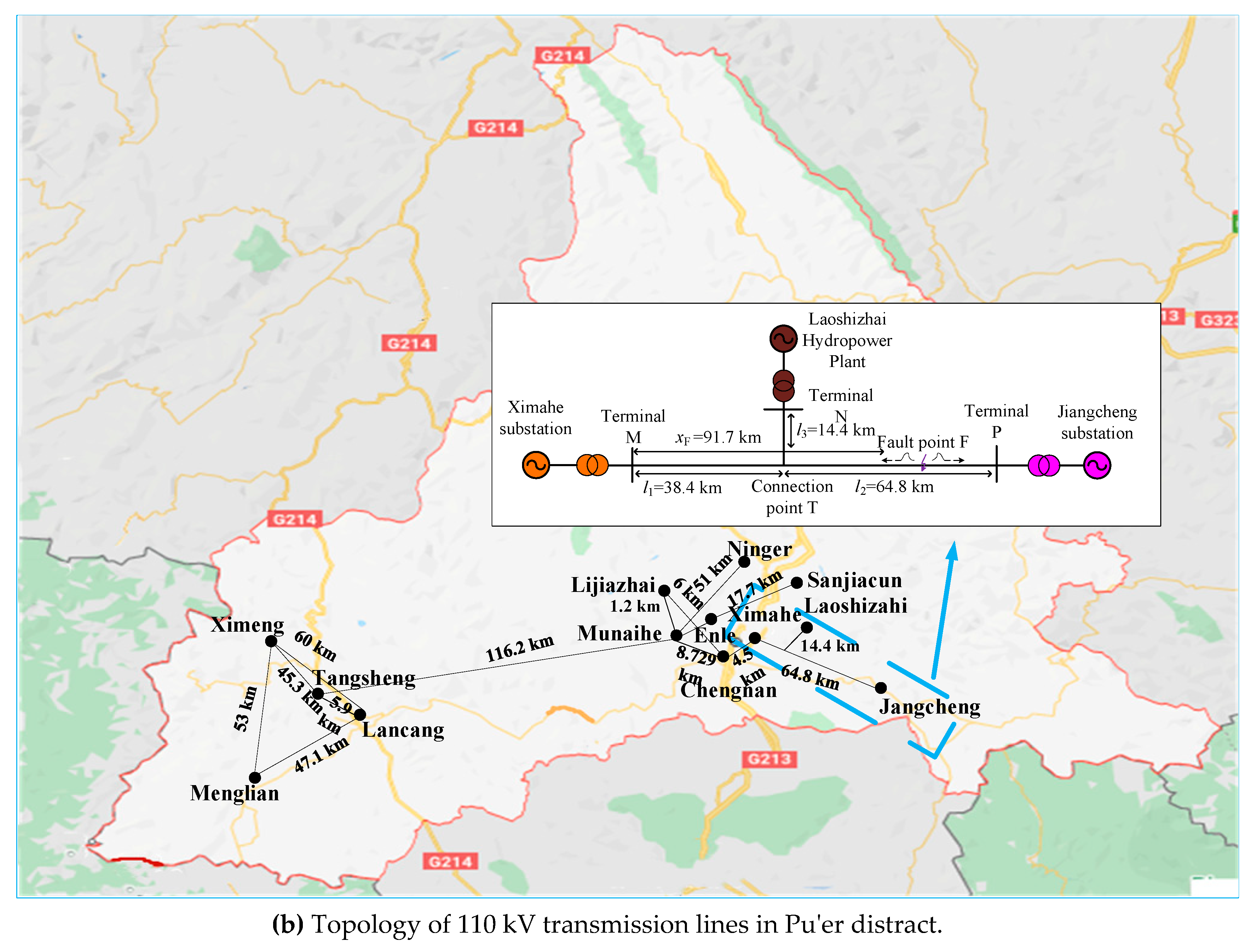
The equivalent topology of the T-connection transmission line is shown in
Figure 1. M, N, and P represent the three terminals of the T-connection transmission line; T is the connection point;
l1 is the line distance from M to T;
l2 is the line distance from P to T;
l3 is the distance from N to T. In actual engineering, the lengths of the three terminals to the connection point cannot be totally identical. In order to simplify the analysis, it is assumed that
l1 >
l3 >
l2 in this paper. Terminal M is applied as the measurement terminal to discuss.
2.1. Travelling Wave Propagation Characteristics of Faults in Section MT
We assume that the distance from the fault point F to the measurement terminal M is , l1 is the line distance from terminal M to connection point T, l2 is the line distance from terminal P to connection point T, while l3 is the distance from terminal N to connection point T, furthermore l1 > l3 > l2.
It is supposed in this paper that
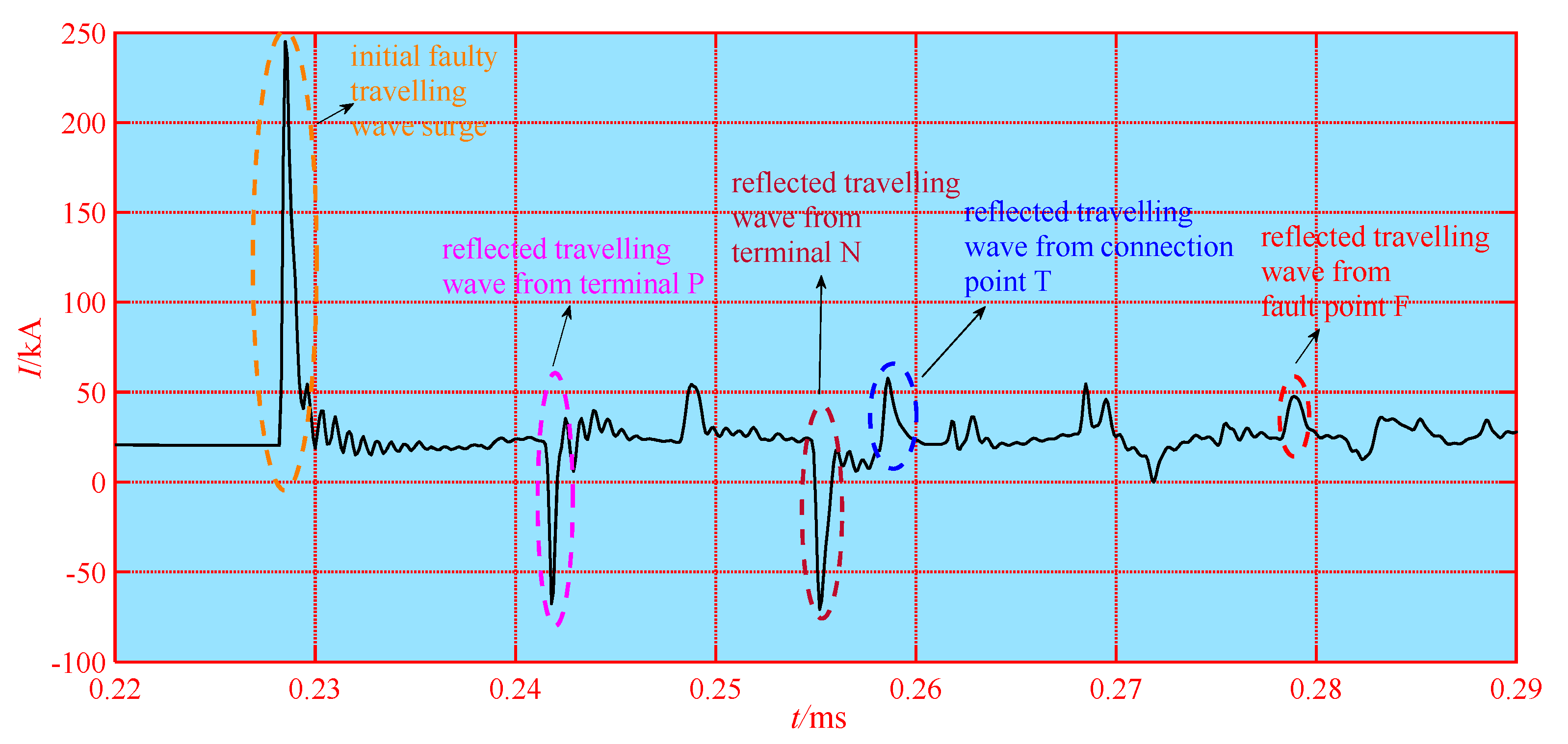
t0,
tF,
tT,
tN,
tP are the times of the travelling waves arriving terminal M, which are initial travelling wave, reflected wave surge from fault point F, reflected travelling wave from connection point T, reflected travelling wave from terminal N and reflected travelling wave from terminal P. The time of travelling wave surges arriving terminal M are listed in
Table 1.
Under this assumption, it is necessary to analyze the possible quantitative relationship between , , and . There are three situations among , , and , which is , , and .
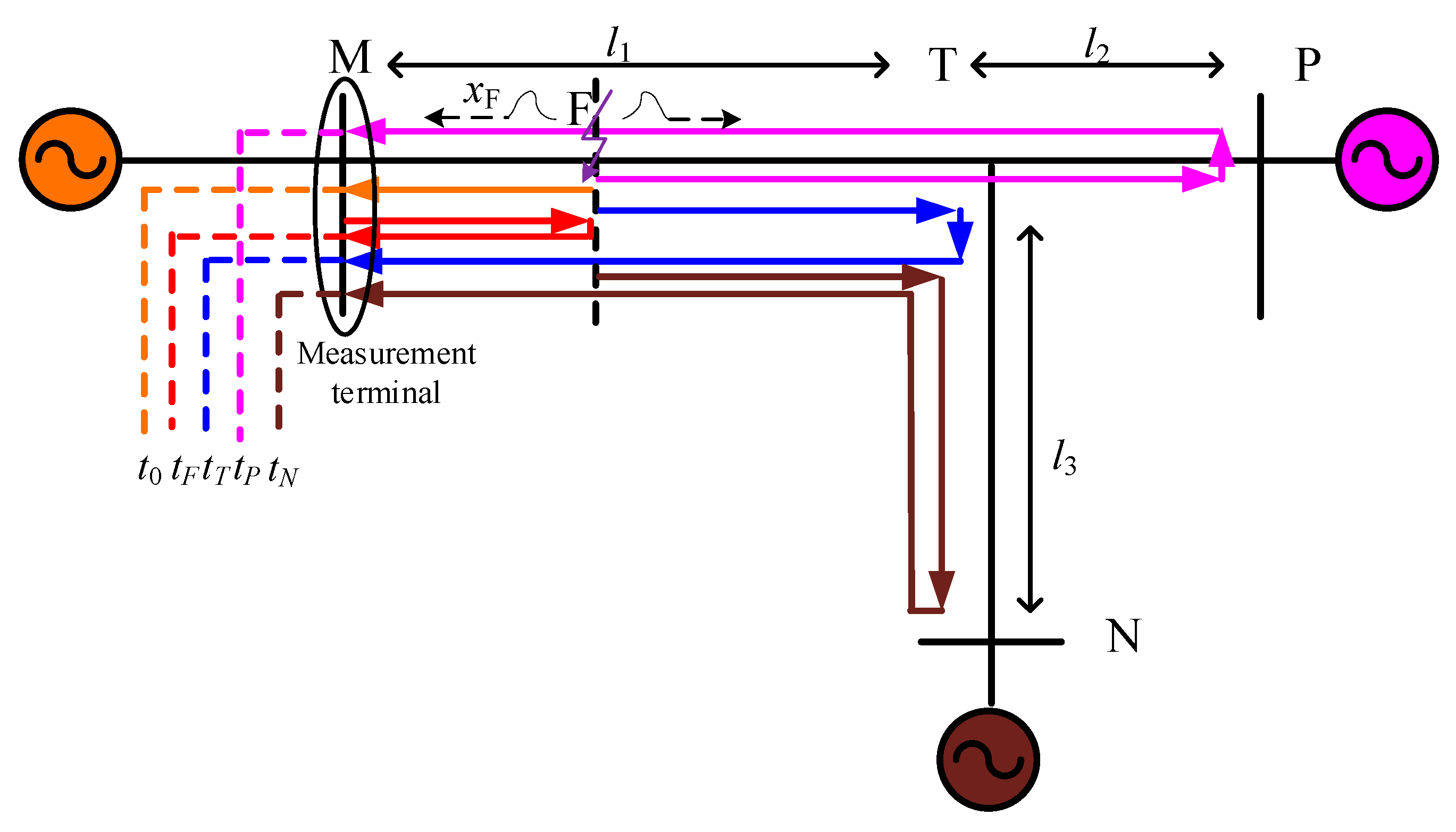
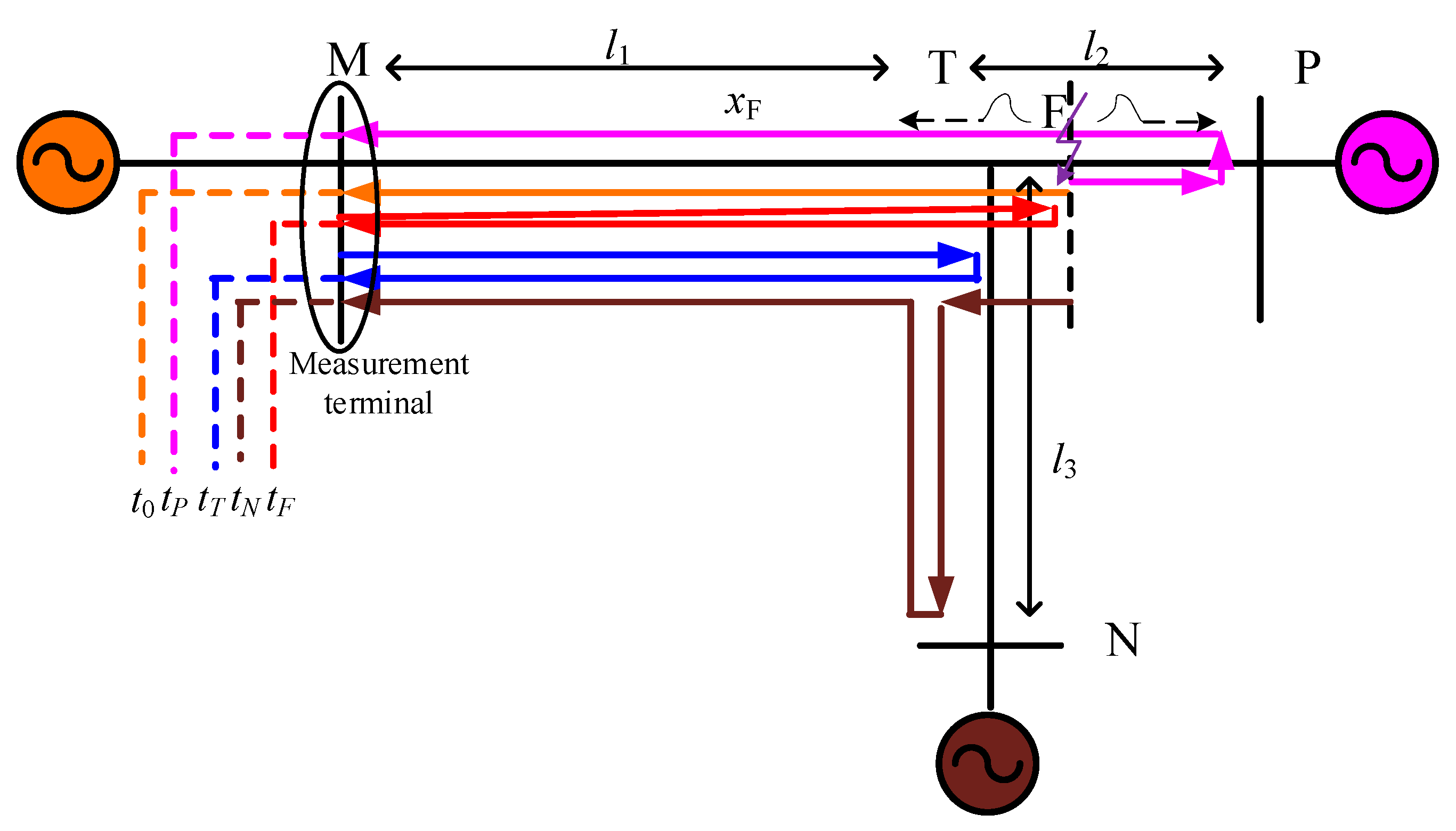
(1) If the fault occurs in the range from M to T and the fault distance satisfies
, the travelling wave propagation path of the T-connection transmission line is shown in
Figure 2.
The time and the propagation paths of travelling waves arriving the terminal M are listed in
Table 2.
The distance between the initial travelling wave and the reflected travelling wave from the fault point F is
. The relationship of
t0,
tF,
tT,
tP and
tN can be determined as follows:
In this case,
, it is not difficult to see that
. Therefore, the reflected travelling wave from the fault point F reaches the measuring terminal M earlier than the reflected travelling wave from the connection point T. Thus, it can be clearly seen from
Figure 2 that
t0<
tF<
tT<
tP<
tN.
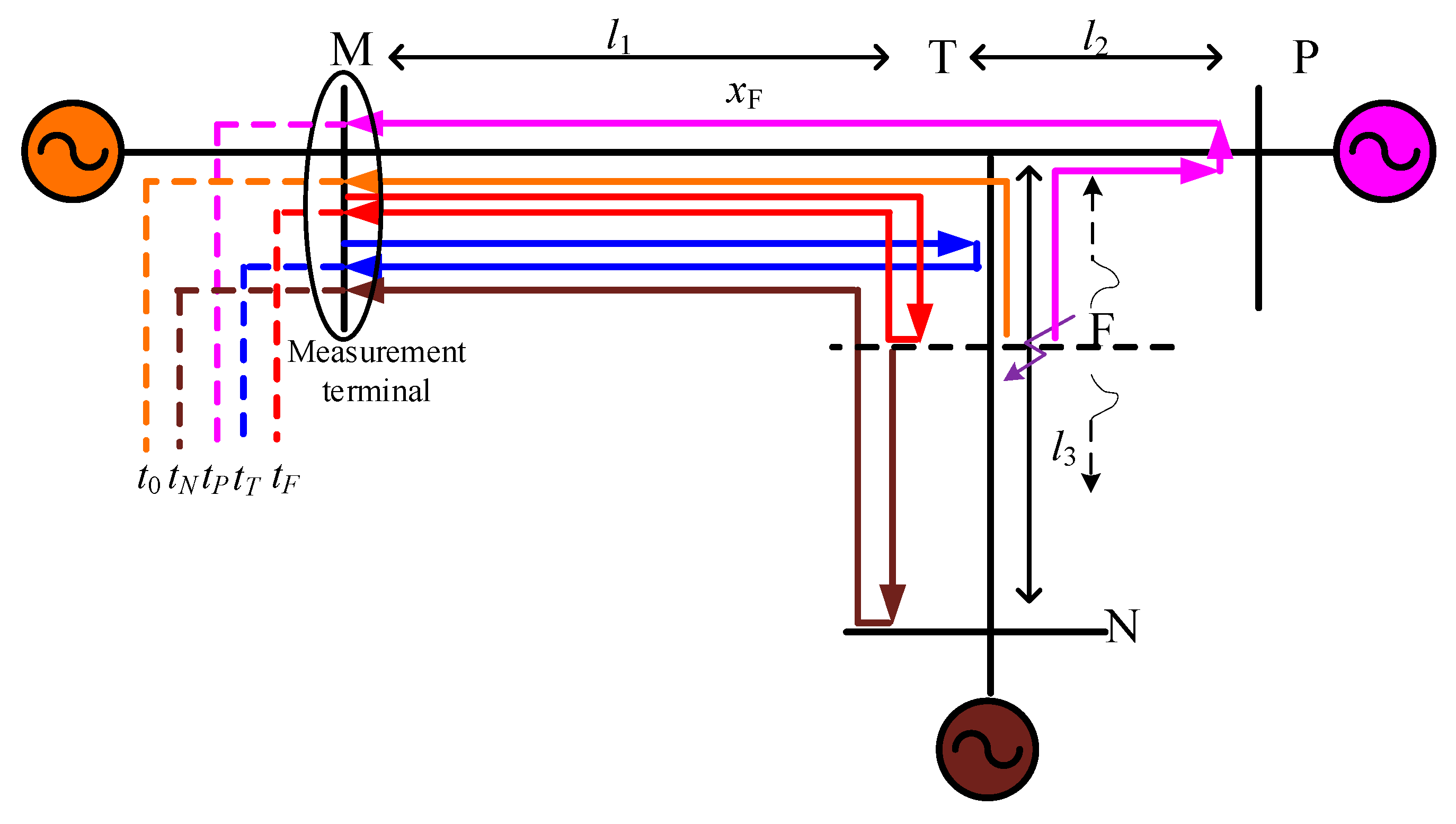
(2) If the fault occurs in the range from the terminal M to the connection point T with relationship of
, the travelling wave propagation path of the T-connection transmission line is shown in
Figure 3.
The time of travelling waves arriving the terminal M and the propagation paths are listed in
Table 3.
The distance between the initial travelling wave and the reflected travelling wave from connection point T is
. The relationship of
t0,
tT,
tF,
tP and
tN can be determined as follows:
In this situation, , which causes , hence, it can be concluded that the reflected travelling wave from the connection point T reaches the measuring terminal M earlier than the reflected travelling wave from the fault point F. From Equation (2), it is easy to determine t0<tT<tF<tP<tN.
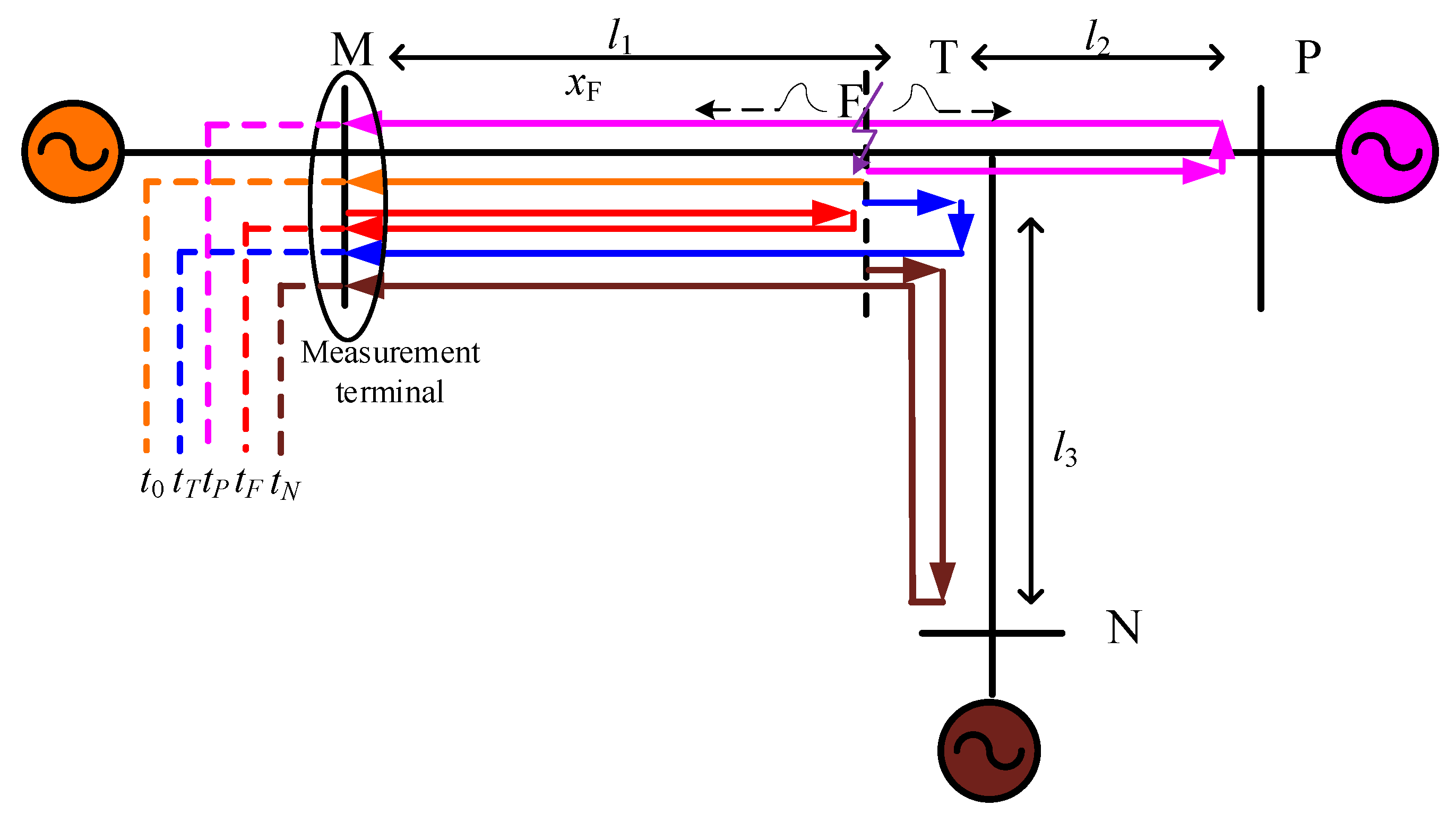
(3) If the fault occurs in the range from terminal M to connection point T within the relationship of
, the travelling wave propagation path of the T-connection transmission line is shown in
Figure 4.
The times of travelling waves arriving terminal M are listed in
Table 4.
The distance between the initial travelling wave and the reflected travelling wave from connection point T is
. The relationship of
t0,
tT,
tP,
tF and
tN can be determined as follows:
Under this assumption, , , the reflected travelling wave from the connection point T reaches the measuring terminal M earlier than the reflected travelling wave from the fault point F. From Equation (3), it is easy to determine t0<tT<tP<tF<tN.
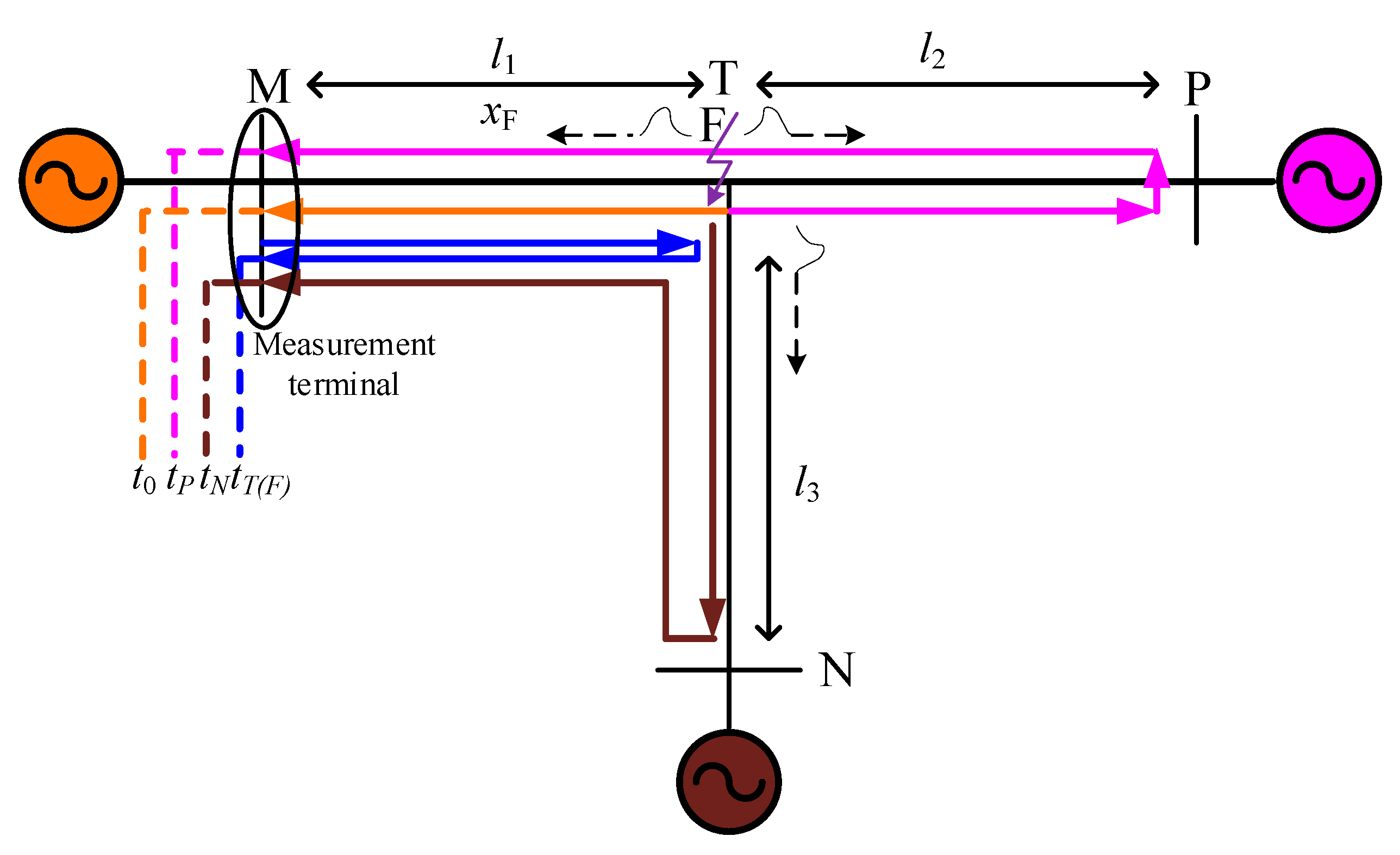
2.2. Travelling Wave Propagation Characteristics of Faults in Section TP
When the fault occurs at the section TP, the fault travelling wave propagation path is shown in
Figure 5.
The times of travelling waves arriving terminal M are listed in
Table 5.
In the condition shown in
Figure 5, the distance between the initial travelling wave and the reflected travelling wave from terminal P is
. The relationship of
t0,
tP,
tT,
tN and
tF can be determined as follows:
Under this condition, it is not difficult to see that , therefore, it can be concluded that the reflected travelling wave from the terminal P reaches the measuring terminal M earlier than the reflected travelling wave from the terminal N. Besides , , it is easy to determine t0<tP<tN<tT<tF.
2.3. Travelling Wave Propagation Characteristics of Faults in Section TN
When the fault occurs at the section of TN, the situation is more complex than mentioned above. The fault travelling wave propagation path is shown in
Figure 6.
The distance between the initial travelling wave and the reflected travelling wave from terminal N is
. The relationship of
t0,
tN,
tP,
tT, and
tF can be determined as follows:
In this condition, we cannot determine which of the reflected travelling waves from terminal P and the reflected travelling wave from terminal N reaches the terminal M first, because the relationship between
and 0 cannot be judged. However, this does not affect the judgment of the fault section, because only when the section TN is faulty, the two travelling waves that finally arrived at terminal M are the reflected travelling wave from the connection point T and the reflected travelling wave from fault point F. Moreover, no matter whether the reflected travelling wave from terminal N reaches the terminal M first or the reflected travelling wave from terminal P first reaches the terminal M, their time relationship with the arrival time of the initial wave will not change, as shown in Equation (5). The times of travelling waves arriving terminal M are listed in
Table 6. In this table, the positional relationship of
tN and
tP may be reversed. Therefore, it is easy to determine
t0<
tP<
tN<
tT<
tF, or
t0<
tN<
tP<
tT<
tF.
2.4. Analysis of Connection Point T Fault Travelling Wave Propagation Characteristics
If the fault occurs at the connection point T, this case is the most special of all cases. The reflected travelling wave from the fault point T and the reflected travelling wave from the connection point T is coincided. The fault travelling wave propagation path is shown in
Figure 7.
In this case, it is only necessary to establish the relationship between the initial travelling wave and the reflected travelling wave from the connection point T, the reflected travelling wave from the terminal P, and the reflected travelling wave from terminal N. The distance between the initial travelling wave and the reflected travelling wave from terminal P is
. The distance between the initial travelling wave and the reflected travelling wave from terminal N is
. The distance between the initial travelling wave and the reflected travelling wave from the connection point T (the reflected travelling wave from fault point F) is
. The relationship of
t0,
tP,
tN,
tT(
tF) can be determined as follows:
The times of travelling waves arriving terminal M are listed in
Table 7.
In this case, it is not difficult to see that , therefore, it can be concluded that the reflected travelling wave from the terminal P reaches the measuring terminal M earlier than the reflected travelling wave from the terminal N. Besides , it is easy to determine t0 < tP < tN < tT(tF).
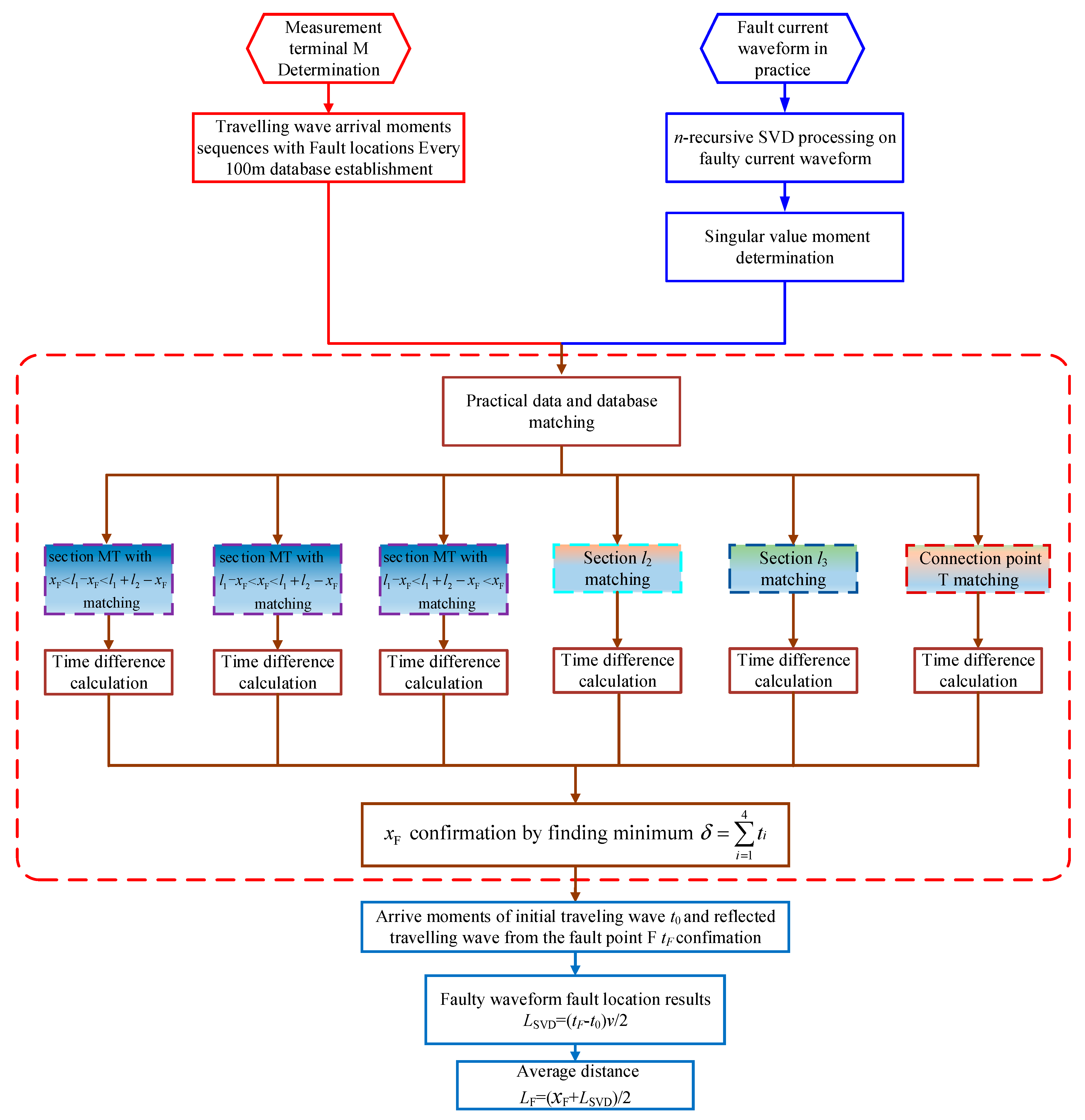
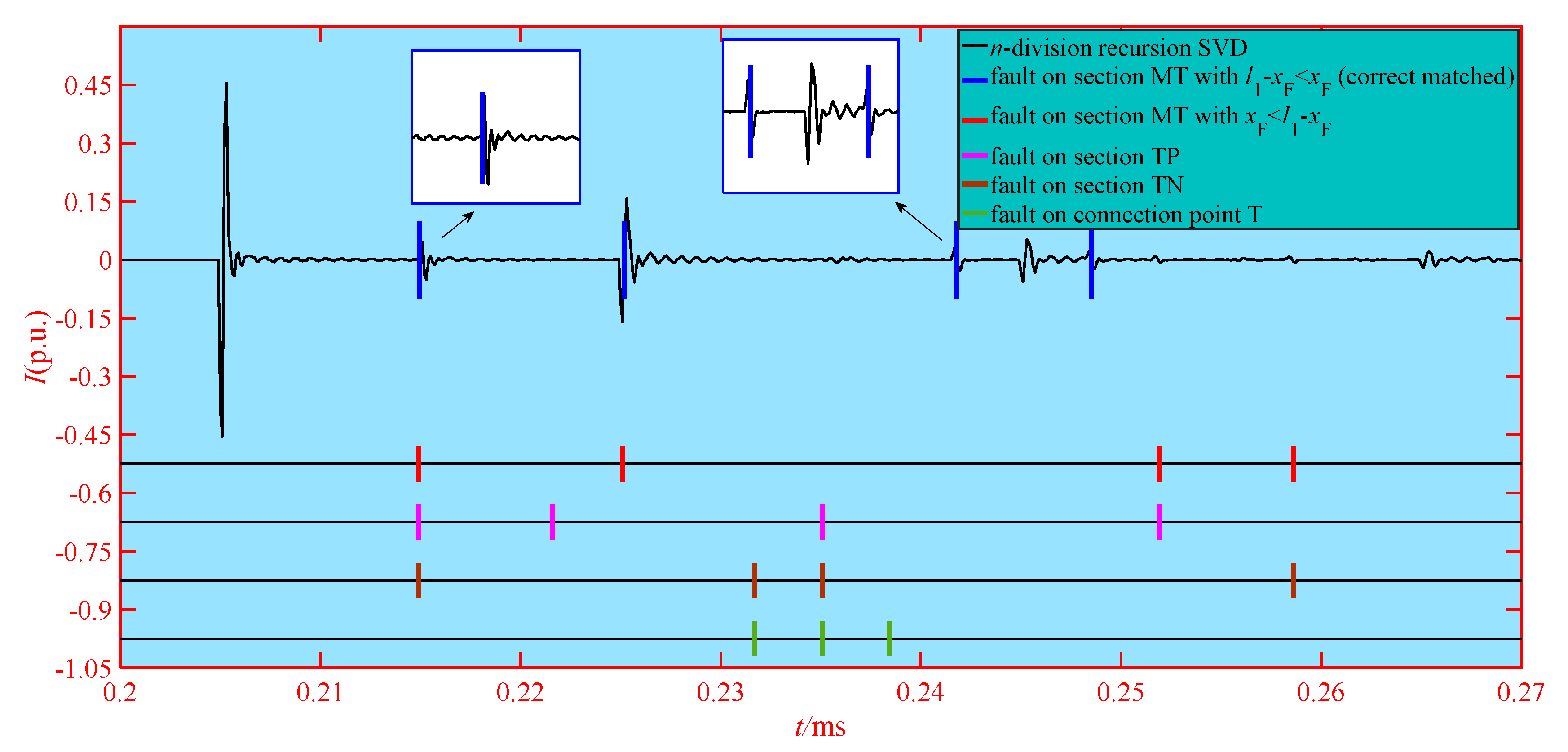
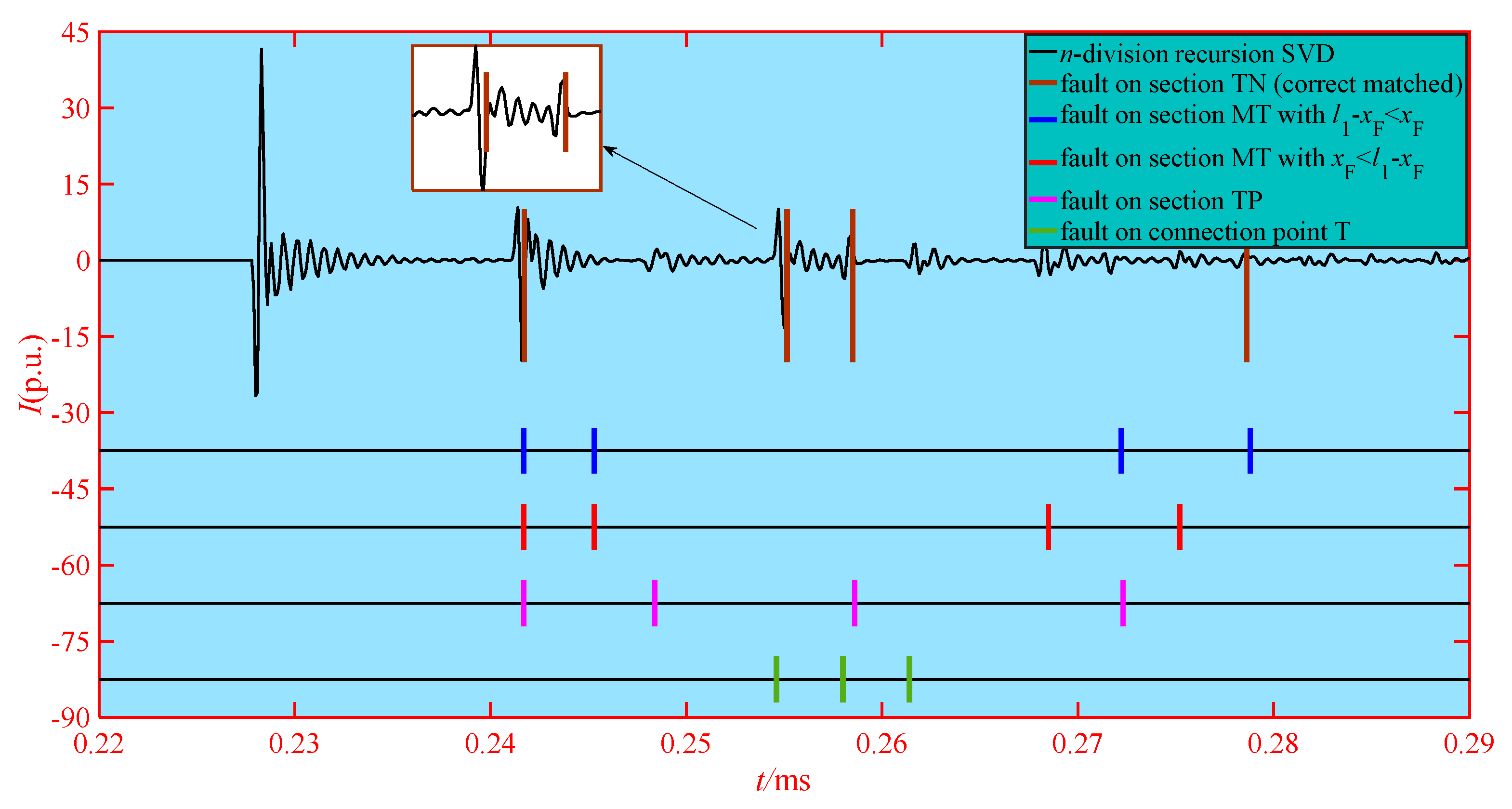
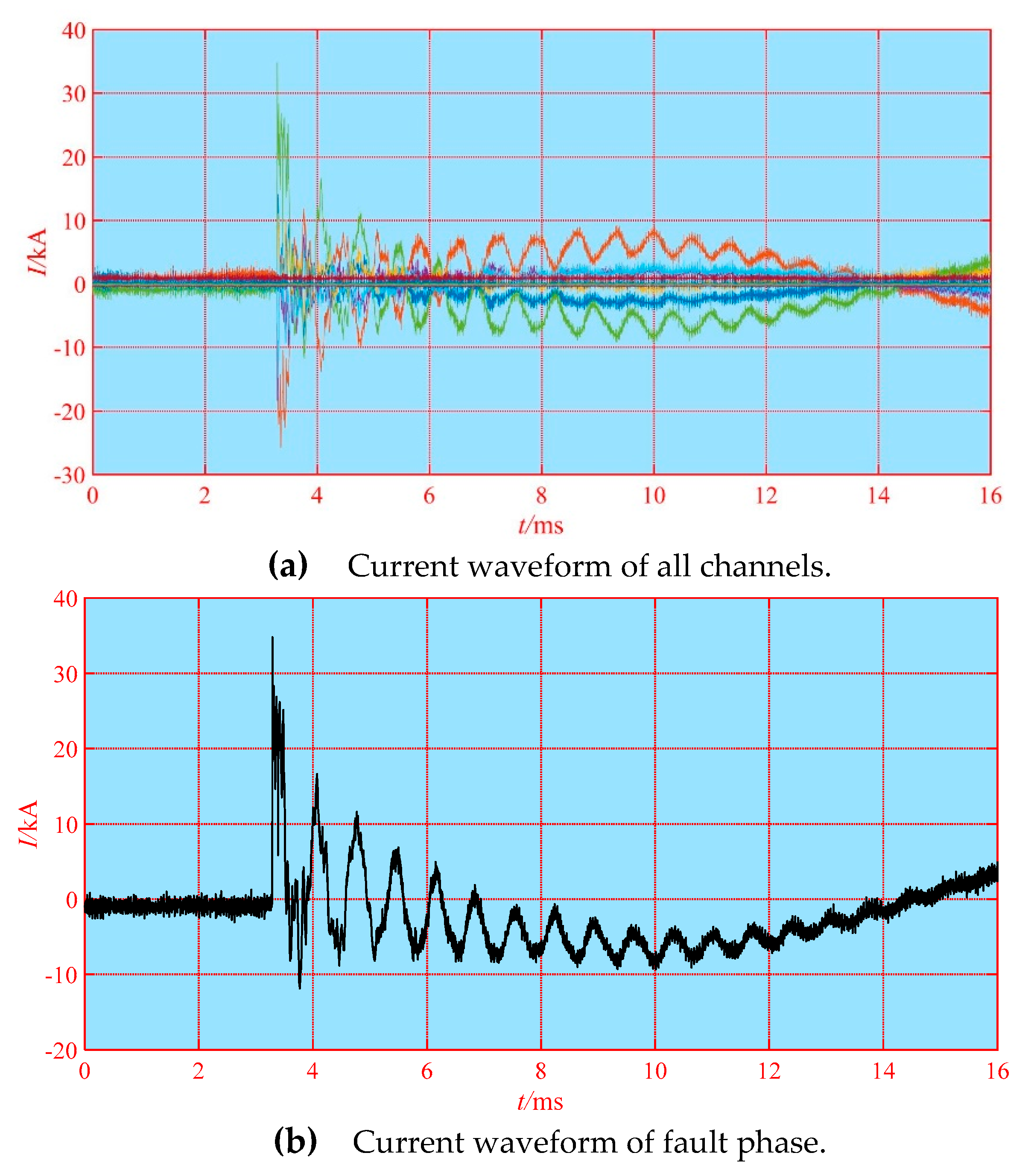
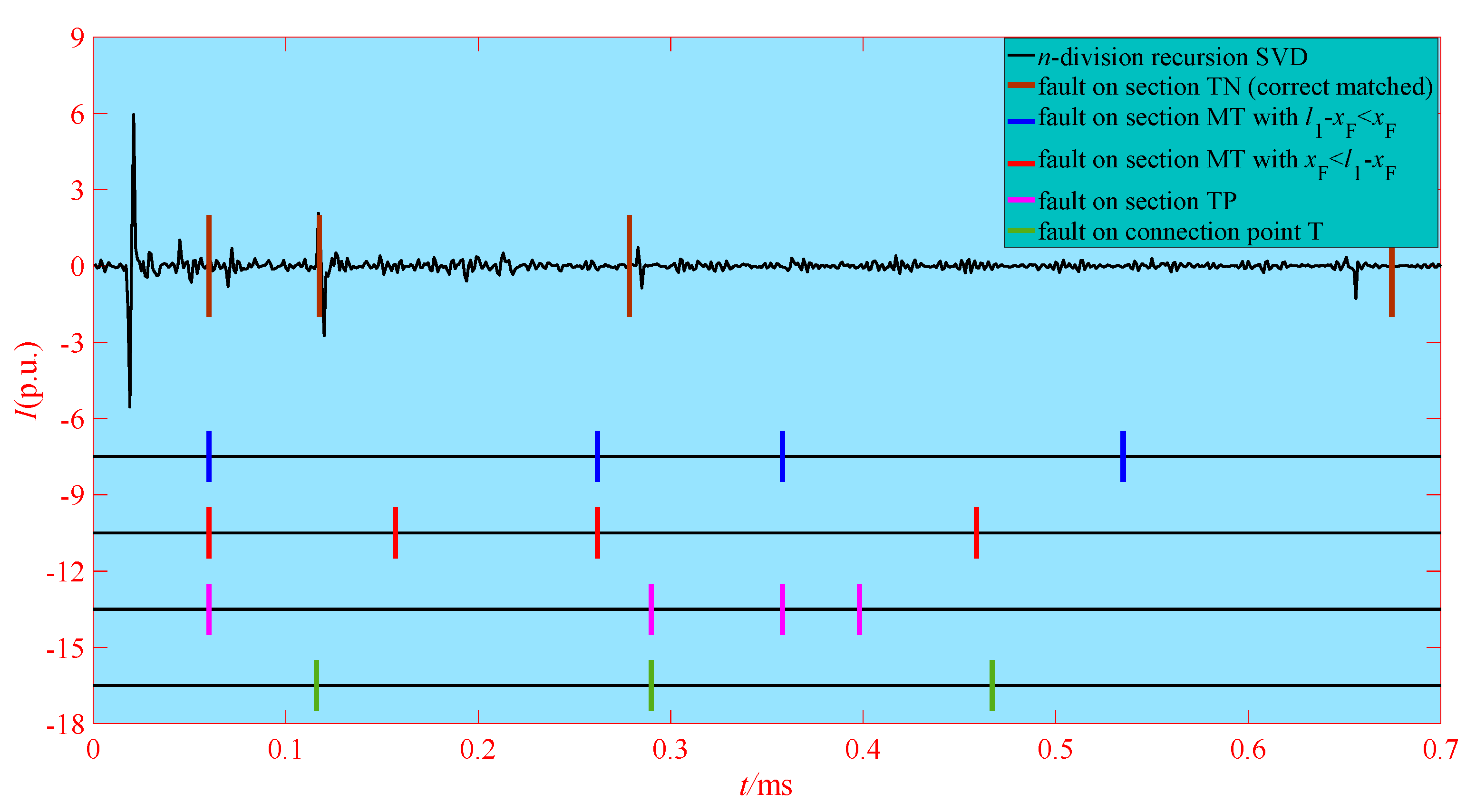
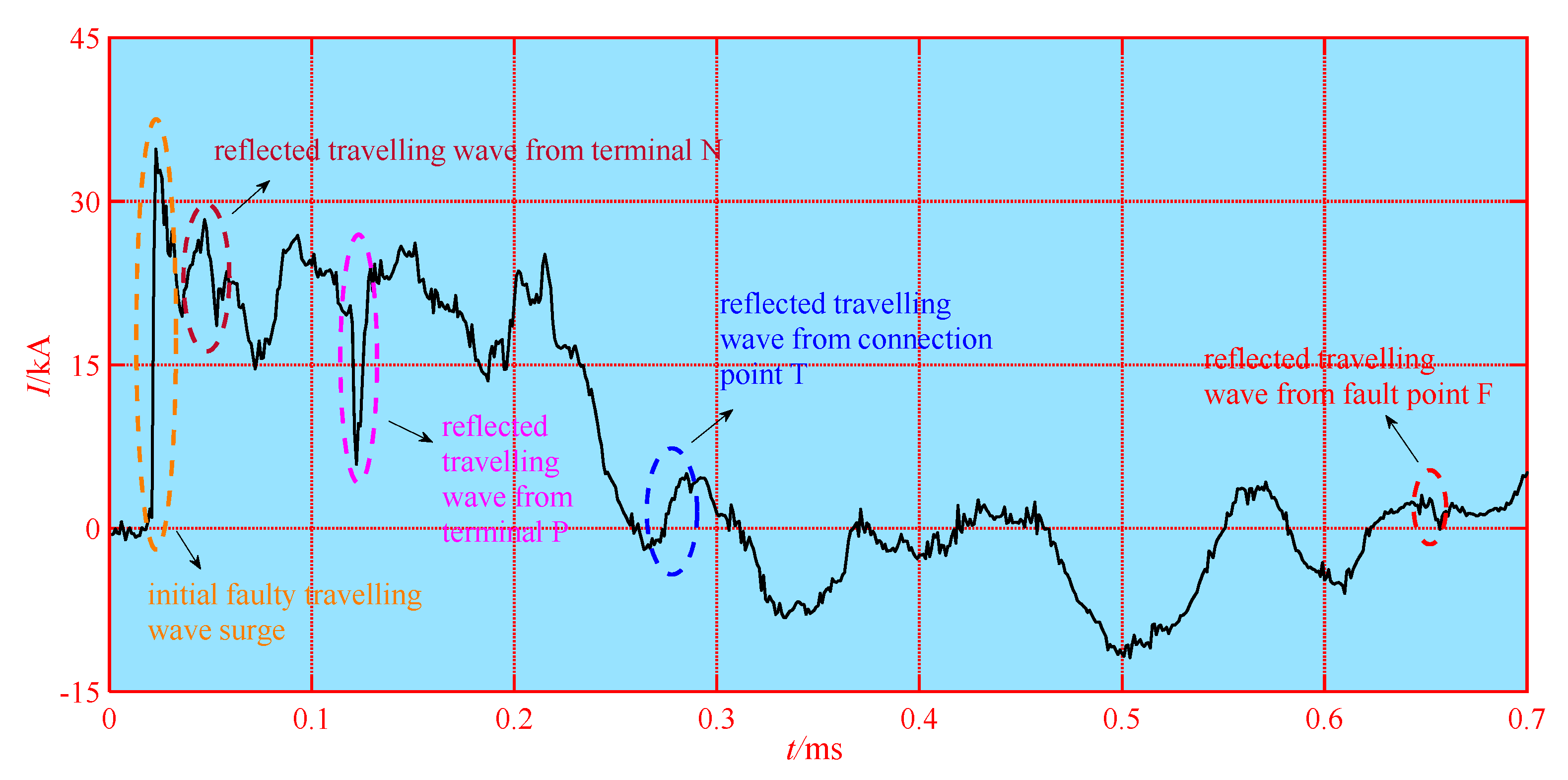
By analyzing the above fault conditions, it can be found that when the fault occurs on any point of the T-connection transmission line, there is a specific travelling wave sequence, which corresponds to the location of the fault point. In other words, a specific travelling wave sequence corresponds to only one fault point on the T-connection transmission line. In order to identify the faulty section and locate the fault point, a collection of the sequences of travelling wave arriving time is established. In this collection, each data is simulated as a fault point in the transmission line with different fault location to obtain the arrival moment of reflected travelling wave from fault point F, reflected travelling wave from connection point T, reflected travelling wave from terminal N, and reflected travelling wave from terminal P. Finally, the sequence of the travelling waves of the researched data is applied to compare with the data in the collection.






















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}