A Novel Control Scheme for Multi-Terminal Low-Frequency AC Electrical Energy Transmission Systems Using Modular Multilevel Matrix Converters and Virtual Synchronous Generator Concept



Abstract
:1. Introduction
- (1)
- To form the proposed MT-LFAC electrical energy system, we use M3Cs to convert the conventional frequency to low frequency with improved output waveforms on both sides.
- (2)
- The used M3Cs are controlled by the VSG-based control to enable power sharing and frequency stability in the LFAC network. The autonomous feature of the VSG control made the LFAC system more reliable and less communication-dependent in comparison to the existing master-slave control for point-to-point LFAC system.
- (3)
- We also proposed a new droop control scheme to allow the system to operate in both commanded mode and frequency restoration mode. Hence, the system can selectively work with/without local command while ensuring that no frequency deviation occurs in the steady state.
- (4)
- To address the concern of less inductive line impedance, we applied the virtual inductive impedance to ensure the decoupling between active and reactive power in the less inductive LFAC system.
2. Multi-Terminal System Configuration
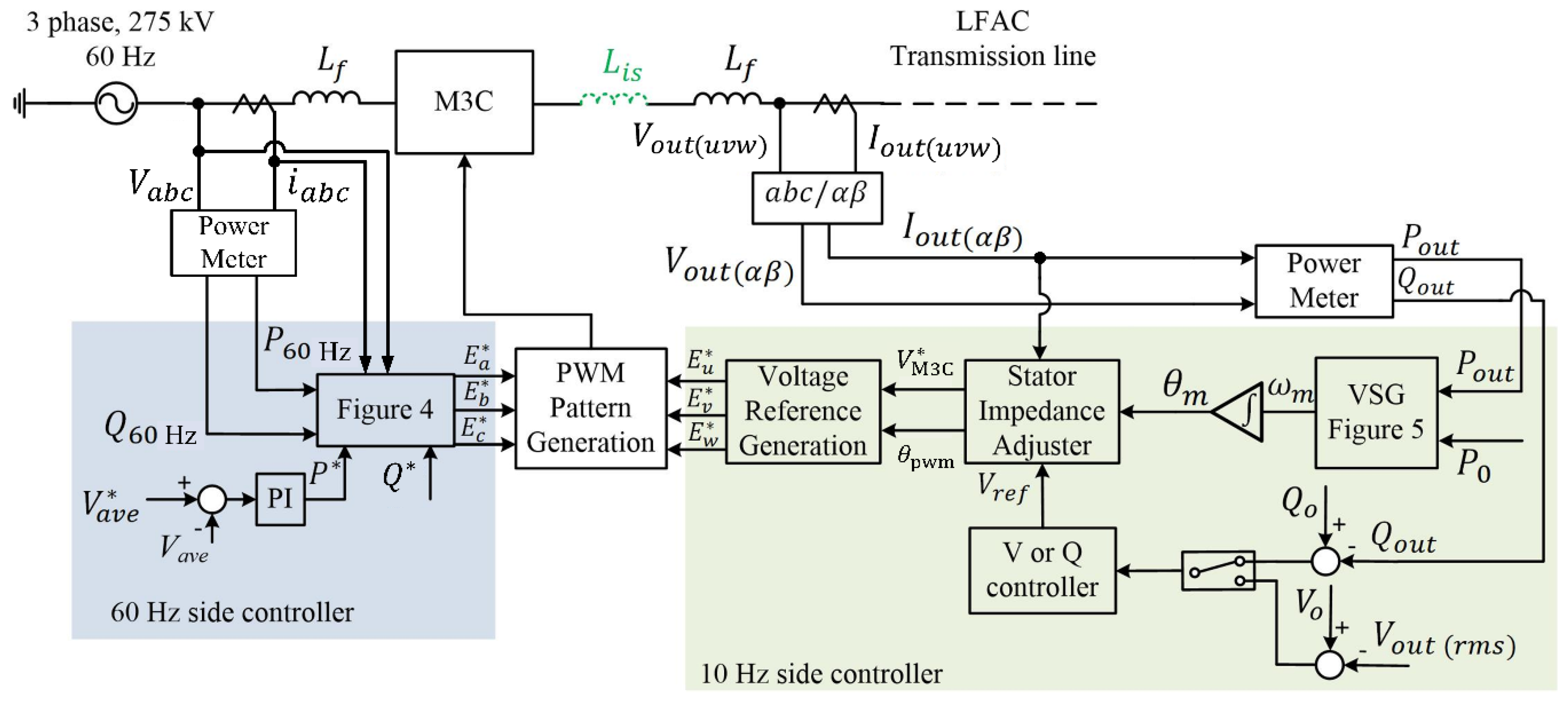
3. Circuit Configuration and M3C Control
3.1. Circuit Configuration
3.2. Overall Control Scheme of M3C
4. VSG Control
4.1. Active Power Control
4.2. Governor Control and −P Droop Characteristics
4.3. Reactive Power and Voltage Control
4.4. Stator Impedance Adjuster
4.5. On Real-World Applicability of the Proposed Approach
- (1)
- Despite the high number of power cells required by the M3C, its constructive characteristics allow low-frequency operation with low circulating current requirements. Moreover, the above-mentioned advantages and its grid-code compliance performance are examined among the other high-power converter topologies in some real-world applications such as high-power wind energy and motor drive systems [41,42,43].
- (2)
- Unlike a low voltage small grid, a power energy transmission system is a bulk costly system with expensive components and installation process. Therefore, improving the control/operation performance of this system, even with complex devices/converters and control mechanisms are allowed. Advantages of the applied M3C-based control scheme such as enhancing dynamic performance and reducing the line losses in a high voltage/power system can compensate the higher degree of complexity of the used converters.
- (3)
- Due to the symmetrical structure of the multilevel matrix converter, both step-up and step-down of voltage magnitude can be easily done. This feature causes us to use the converter without transformer, and the transformer-less operation; in addition to increase of efficiency, flexibility, scalability, modularity and reliability, this leads to a lower installation and operation costs in a power transmission system.
- (4)
- It is shown that the M3C can present the fault tolerance property, i.e., after a branch failure, the nine branch M3C can be reduced to operate as a six-branch Hexverter [44]. Furthermore, the M3C employs inductive elements on both sides and then requires five conducting branches at any instant, which means indeed that the number of under control switches in the performed system is reduced to 80.
- (5)
- Although the M3Cs are still under research and development, they have already found successful industrial applications, and many new contributions and new commercial topologies have been reported in the last few years [40]. Therefore, they can be considered a mature and proven technology. Some reported applications are addressed in [17,40,41,42,43,44], and M3Cs for these applications are commercially offered by a growing group of companies in the field [45].
- (6)
- The M3C is the only converter system that effectively increases the power rating of the converter. This topology elevates the voltage by the series connection of power modules. Of course, its high level of complexity must be responded by performing an effective/advanced control design methodology and a sophisticated control structure such as the one proposed (using VSG) in our manuscript.
5. Simulation Results
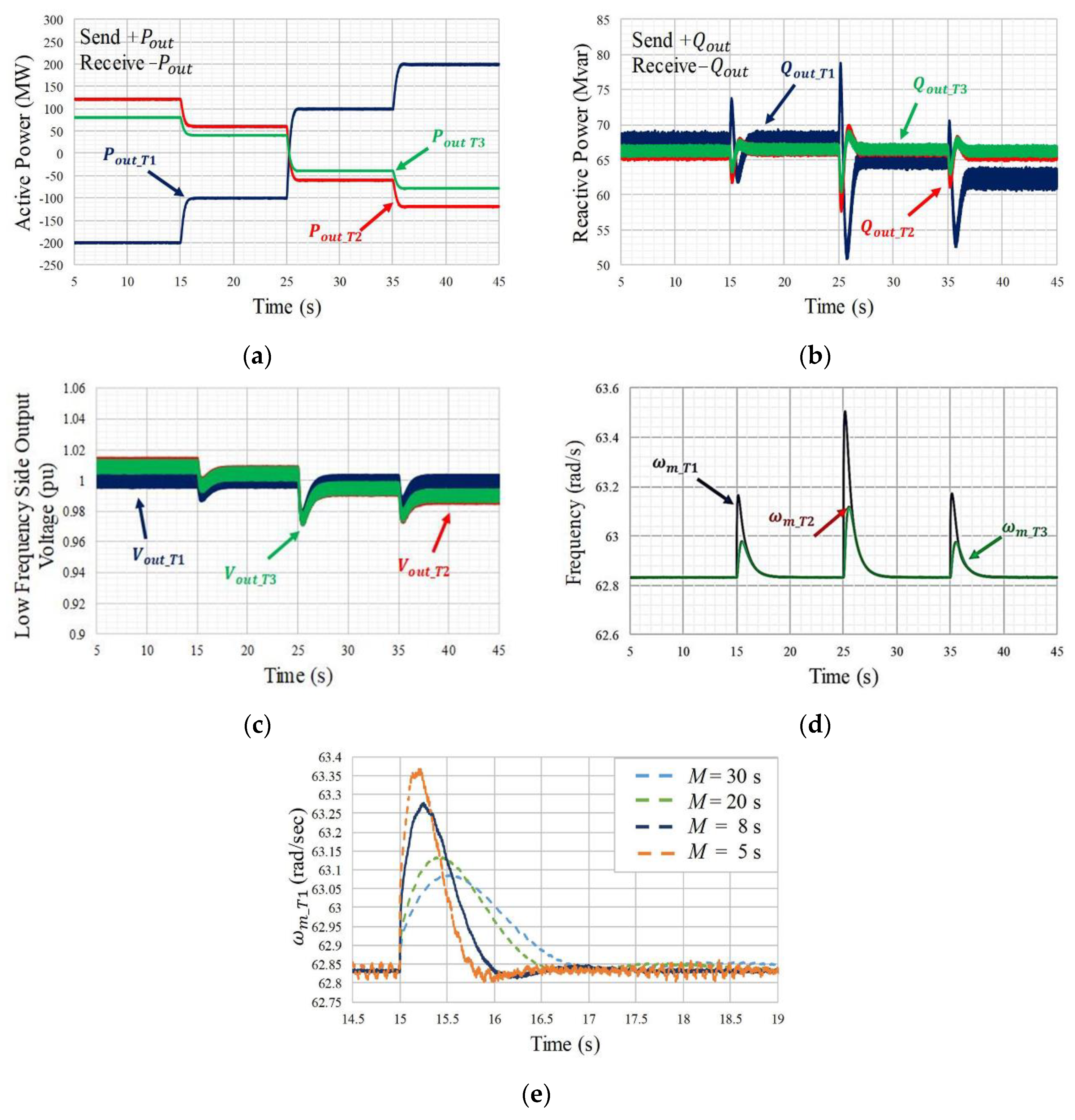
5.1. Case 1: Terminal 1 Commanded Mode, Terminals 2 And 3 Frequency Restoration Mode
5.2. Case 2 Terminals 1 and 2 Commanded Mode, Terminal 3 Frequency Restoration Mode
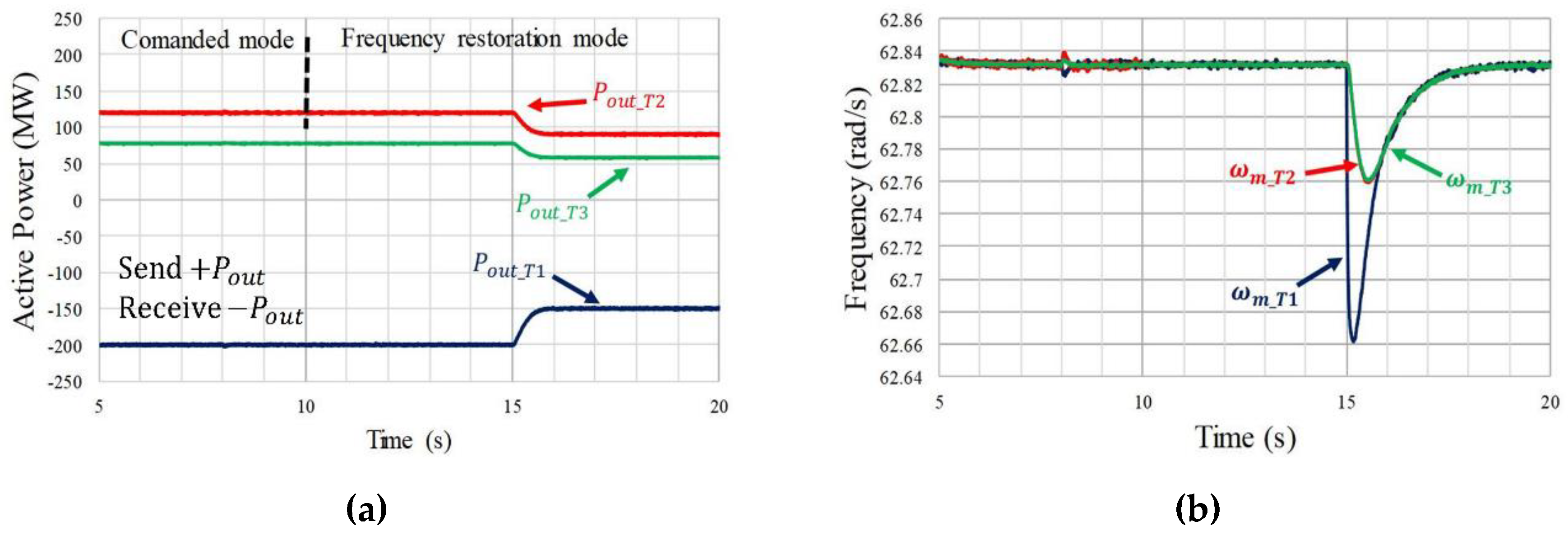
5.3. Case 3: Terminal 2 Switching from Commanded Mode To Frequency Restoration Mode
6. Conclusions
- (1)
- The modular multilevel matrix converter (M3C) was proposed for frequency conversion between nominal frequency (50 or 60 Hz) and low frequency (50/3 and/or 60/3 Hz) in order to obtain higher power quality and lower power conversion losses.
- (2)
- Application of virtual synchronous generator (VSG) control in 10 Hz side was proposed in order to autonomously control active and reactive power and voltage of each terminal and maintaining the frequency stable in the steady-state.
- (3)
- The VSG control used in this work has succeeded on enabling the M3Cs to behave like synchronous generators to construct the MT-LFAC network.
- (4)
- Autonomous frequency restoration is realized by the proposed frequency restoration mode and the problem of the low X/R ratio in LFAC is solved by virtual impedance control.
- (5)
- Operation of the proposed system was demonstrated by the computer simulation using PSCAD/EMTDC software. Smooth operation during changes of power reference values were achieved.
- (6)
- The control scheme proposed for the MT-LFAC system has proved its flexibility, and its ease of implementation. Thus, the multiterminal system can be easily extended to more terminals without altering the controller coefficients and/or parameters since they are in per unit values. The only point that needs to be considered is deciding the role of power flow, for example; each terminal capacity, sending vs. receiving groups of terminals, and the total amount of the power that needs to be accommodated.
Author Contributions
Funding
Conflicts of Interest
References
- Belda, N.A.; Plet, C.A.; Smeets, R.P.P. Analysis of Faults in Multiterminal HVDC Grid for Definition of Test Requirements of HVDC Circuit Breakers. IEEE Trans. Power Deliv. 2018, 60, 403–411. [Google Scholar] [CrossRef]
- Chen, J.; Dou, Y.; Li, Y.; Li, J.; Li, G. A Transient Fault Recognition Method for an AC-DC Hybrid Transmission System Based on MMC Information Fusion. Energies 2017, 10, 23. [Google Scholar] [CrossRef] [Green Version]
- Bevrani, H.; Watanabe, M.; Mitani, Y. Power System Monitoring and Control; IEEE-Wiley press: New York, NY, USA, 2014. [Google Scholar]
- Bozhko, S.V.; Blasco-Giménez, R.; Li, R.; Clare, J.C.; Asher, G.M. Control of offshore DFIG-based wind farm grid with line-commutated HVDC connection. IEEE Trans. Energy Convers. 2007, 22, 71–78. [Google Scholar] [CrossRef]
- Wang, X.; Wang, X. Feasibility study of fractional frequency transmission system. IEEE Trans. Power Syst. 2013, 11, 962–967. [Google Scholar] [CrossRef]
- Pichetjamroen, A.; Ise, T. Power Control of Low Frequency AC Transmission Systems Using Cycloconverters with Virtual Synchronous Generator Control. Energies 2017, 10, 34. [Google Scholar] [CrossRef] [Green Version]
- Pichetjamroen, A.; Ise, T. A Proposal on Low Frequency AC Transmission as a Multi-Terminal Transmission System. Energies 2016, 9, 687. [Google Scholar] [CrossRef] [Green Version]
- Liu, S.; Wang, X.; Ning, L.; Wang, B.; Lu, M.; Shao, C. Integrating Offshore Wind Power Via Fractional Frequency Transmission System. IEEE Trans. Power Deliv. 2017, 32, 1253–1261. [Google Scholar] [CrossRef]
- Nguyen, Q.; Todeschini, G.; Santoso, S. Power Flow in a Multi-Frequency HVac and HVdc System: Formulation, Solution, and Validation. IEEE Trans. Power Syst. 2019, 34, 2487–2497. [Google Scholar] [CrossRef]
- Ruddy, J.; Meere, R.; O’Donnell, T. Low Frequency AC transmission as an alternative to VSC-HVDC for grid interconnection of offshore wind. In Proceedings of the 2015 IEEE Eindhoven Power Tech, Eindhoven, The Netherlands, 29 June–2 July 2015. [Google Scholar]
- Fischer, W.; Braun, R.; Erlich, I. Low frequency high voltage offshore grid for transmission of renewable power. In Proceedings of the 3rd IEEE PES Innovative Smart Grid Technolgies Europe (ISGT Europe), Berlin, Germany, 14–17 October 2012. [Google Scholar]
- Cho, Y.; Cokkinides, C.J.; Meliopoulos, A.P. Time domain simulation of a three-phase cycloconverter for LFAC transmission systems. In Proceedings of the IEEE PES Transmission and Distribution Conference and Exposition (PES T&D), Orlando, FL, USA, 7–10 May 2012. [Google Scholar]
- Chen, H.; Johnson, M.H.; Aliprantis, D.C. Low-Frequency AC Transmission for Offshore Wind Power. IEEE Trans. Power Deliv. 2013, 28, 2236–2244. [Google Scholar] [CrossRef]
- Kawamura, W.; Chen, K.; Hagiwara, M.; Akagi, H. A Low-Speed, High-Torque Motor Drive Using a Modular Multilevel Cascade Converter Based on Triple-Star Bridge Cells (MMCC-TSBC). IEEE Trans. Ind. Appl. 2015, 51, 3965–3974. [Google Scholar] [CrossRef]
- Liu, S.; Wang, X.; Meng, Y.; Sun, P.; Luo, H.; Wang, B. A Decoupled Control Strategy of Modular Multilevel Matrix Converter for Fractional Frequency Transmission System. IEEE Trans. Power Deliv. 2017, 32, 2111–2121. [Google Scholar] [CrossRef]
- Ludois, D.C.; Reed, J.K.; Venkataramanan, G. Hierarchical Control of Bridge-of-Bridge Multilevel Power Converters. IEEE Trans. Ind. Electron. 2010, 57, 2679–2690. [Google Scholar] [CrossRef]
- Kouro, S.; Malinowski, M.; Gopakumar, K.; Pou, J.; Franquelo, L.; Wu, B.; Rodriguez, L.; Perez, M.; Leon, J. Recent advances and industrial applications of multilevel converters. IEEE Trans. Ind. Electron. 2010, 57, 2553–2580. [Google Scholar] [CrossRef]
- Perez, M.A.; Bernet, S.; Rodriguez, J.; Kouro, S.; Lizana, R. Circuit Topologies, Modeling, Control Schemes, and Applications of Modular Multilevel Converters. IEEE Trans. Power Electron. 2015, 30, 4–17. [Google Scholar] [CrossRef]
- Kouro, S.; Rodriguez, J.; Wu, B.; Bernet, S.; Perez, M. Powering the Future of Industry: High-Power Adjustable Speed Drive Topologies. IEEE Ind. Appl. Mag. 2012, 18, 26–39. [Google Scholar] [CrossRef]
- Nami, A.; Liang, J.; Dijkhuizen, F.; Demetriades, G.D. Modular multilevel converters for HVDC applications: Review on converter cells and functionalities. IEEE Trans. Power Electron. 2015, 30, 18–36. [Google Scholar] [CrossRef]
- Wang, K.; Li, Y.; Zheng, Z.; Xu, L. Voltage balancing and fluctuation suppression methods of floating capacitors in a new modular multilevel converter. IEEE Trans. Ind. Electron. 2013, 60, 1943–1954. [Google Scholar] [CrossRef]
- Moranchel, M.; Bueno, E.; Sanz, I.; Rodríguez, F.J. New Approaches to Circulating Current Controllers for Modular Multilevel Converters. Energies 2017, 10, 86. [Google Scholar] [CrossRef]
- Zhang, L.; Harnefors, L.; Nee, H.P. Power-synchronization control of grid-connected voltage-source converters. IEEE Trans. Power Syst. 2010, 25, 809–820. [Google Scholar] [CrossRef]
- Zhong, Q.C.; Weiss, G. Synchronverters: Inverters that mimic synchronous generators. IEEE Trans. Ind. Electron 2011, 58, 1259–1267. [Google Scholar] [CrossRef]
- Alipoor, J.; Miura, Y.; Ise, T. Power system stabilization using virtual synchronous generator with alternating moment of inertia. IEEE J. Emerg. Sel. Top. Power Electron 2015, 3, 451–458. [Google Scholar] [CrossRef]
- Zhang, L.; Harnefors, L.; Nee, H.P. Modeling and control of VSCHVDC links connected to island systems. IEEE Trans. Power Syst. 2011, 26, 783–793. [Google Scholar] [CrossRef]
- Bevrani, H.; Fracois, B.; Ise, T. Microgrid Dynamics and Control; Wiley: Hoboken, NJ, USA, 2017. [Google Scholar]
- Liu, J.; Miura, Y.; Ise, T. Comparison of Dynamic Characteristics Between Virtual Synchronous Generator and Droop Control in Inverter-Based Distributed Generators. IEEE Trans. Power Electron. 2016, 31, 3600–3611. [Google Scholar] [CrossRef]
- Zhu, J.; Booth, C.D.; Adam, G.P.; Roscoe, A.J.; Bright, C.G. Inertia Emulation Control Strategy for VSC-HVDC Transmission Systems. IEEE Trans. Power Syst. 2013, 28, 1277–1287. [Google Scholar] [CrossRef] [Green Version]
- XLPE Land Cable Systems User’s Guide. Available online: https://library.e.abb.com/public (accessed on 2 July 2019).
- Kammerer, F.; Kolb, J.; Braun, M. A novel cascaded vector control scheme for the modular multilevel converter. In Proceedings of the 37th Annual Conference of the IEEE Industrial Electronics Society (IECON), Melbourne, Australia, 7–10 November 2011. [Google Scholar]
- Miura, Y.; Mizutani, T.; Ito, M.; Ise, T. Modular multilevel matrix converter for low frequency AC transmission. In Proceedings of the IEEE 10th International Conference on Power Electronics and Drive Systems (PEDS), Kitakyushu, Japan, 22–25 April 2013; pp. 1079–1084. [Google Scholar]
- Liu, J.; Miura, Y.; Ise, T. Fixed-Parameter Damping Methods of Virtual Synchronous Generator Control Using State Feedback. IEEE Access 2016, 7, 99177–99190. [Google Scholar] [CrossRef]
- Shintai, T.; Miura, Y.; Ise, T. Oscillation damping of a distributed generator using a virtual synchronous generator. IEEE Trans. Power Del. 2014, 29, 668–676. [Google Scholar] [CrossRef]
- Liu, J.; Miura, Y.; Bevrani, H.; Ise, T. Enhanced Virtual Synchronous Generator Control for Parallel Inverters in Microgrids. IEEE Trans. Smart Grid 2017, 8, 2268–2277. [Google Scholar] [CrossRef]
- Bevrani, H. Robust Power System Frequency Control, 2nd ed.; Springer: Berlin/Heidelberg, Germany, 2014. [Google Scholar]
- Sakimoto, K.; Miura, Y.; Ise, T. Stabilization of a power system including inverter-type distributed generators by a virtual synchronous generator. Electr. Eng. Jpn. (Engl. Transl. Denki Gakkai Ronbunshi) 2014, 187, 7–17. [Google Scholar] [CrossRef]
- Ngo, T.; Lwin, M.; Santoso, S. Steady-State Analysis and Performance of Low Frequency AC Transmission Lines. IEEE Trans. Power Syst. 2016, 31, 3873–3880. [Google Scholar] [CrossRef]
- Tleis, N. Power Systems Modelling and Fault Analysis; Newnes Elsevier: Oxford, UK, 2008; pp. 616–618. [Google Scholar]
- Du, S.; Dekka, A.; Wu, B.; Zargari, N. Modular Multilevel Converters: Analysis, Control, and Applications; Wiley-IEEE Press: Hoboken, NJ, USA, 2017. [Google Scholar]
- Kawamura, W.; Hagiwara, M.; Akagi, H. Control and experiment of a modular multilevel cascade converter based on triple-star bridge cells. IEEE Trans. Ind. Appl. 2014, 50, 3536–3548. [Google Scholar] [CrossRef]
- Baruschka, L.; Mertens, A. A new three-phase AC/AC modular multilevel converter with six branches in hexagonal configuration. IEEE Trans. Ind. Appl. 2013, 49, 1400–1410. [Google Scholar] [CrossRef]
- Kawamura, W.; Hagiwara, M.; Akagi, H.; Tsukakoshi, M.; Nakamura, R.; Kodama, S. AC-Inductors design for a modular multilevel TSBC converter, and performance of a low-speed high-torque motor drive using the converter. IEEE Trans. Ind. Appl. 2017, 53, 4718–4729. [Google Scholar] [CrossRef]
- Karwatzki, D.; von Hofen, M.; Baruschka, L.; Mertens, A. Operation of modular multilevel matrix converters with failed branches. In Proceedings of the 40th Annual Conference of IEEE Industrial Electronics Society (IECON), Dallas, TX, USA, 29 October–1 November 2014; pp. 1650–1656. [Google Scholar]
- Yaskawa. Available online: https://www.yaskawa-global.com/ (accessed on 16 January 2020).












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Common Parameters | |||
|---|---|---|---|
| Parameter | Value | Parameter | Value |
| 275 kV | 0.016 pu | ||
| 60 Hz | Terminal 1 VA | 200 MVA | |
| 10 Hz | Terminal 2 VA | 120 MVA | |
| 0.1 pu | Terminal 3 VA | 80 MVA | |
| Modular Multilevel Matrix Converter (M3C) Parameters | |||
| Parameter | Value | ||
| Sampling frequency | 2 kHz | ||
| Capacitor voltage | 128 kV | ||
| Cell capacitor Arm inductor | 470 μf 128 μH | ||
| Virtual Synchronous Generator (VSG) Parameters | |||
| 275 kV | 0.29203 | ||
| 1.0 pu | 1.0 | ||
| ω0 | 62.831 rad/s | 91.4140 pu | |
| 20 pu | 8.8522 s−1 | ||
| M | 8 s | 0.0159 s | |
| Automatic Reactive Power (AQR) and Automatic Voltage Regulator (AVR) PI Controller Parameters | |||
| 0.001 pu | |||
| 0.5 s | |||
| Transmission Line Parameters | |||
| Cross-linked polyethylene (XLPE) Single core land cable | |||
| Cross section | 500 mm2 | ||
| L | 0.61 mH/km | ||
| C | 0.14 μf/km | ||
| R | 0.0255 Ω/km | ||
| Transmission Line Type | (Mvar) | (Mvar) | (Mvar) |
|---|---|---|---|
| Low Frequency AC (LFAC) | 64.472 | 65.765 | 66.168 |
| High Voltage AC (HVAC) | 385.895 | 393.656 | 396.077 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Al-Tameemi, M.; Miura, Y.; Liu, J.; Bevrani, H.; Ise, T. A Novel Control Scheme for Multi-Terminal Low-Frequency AC Electrical Energy Transmission Systems Using Modular Multilevel Matrix Converters and Virtual Synchronous Generator Concept. Energies 2020, 13, 747. https://doi.org/10.3390/en13030747
Al-Tameemi M, Miura Y, Liu J, Bevrani H, Ise T. A Novel Control Scheme for Multi-Terminal Low-Frequency AC Electrical Energy Transmission Systems Using Modular Multilevel Matrix Converters and Virtual Synchronous Generator Concept. Energies. 2020; 13(3):747. https://doi.org/10.3390/en13030747
Chicago/Turabian StyleAl-Tameemi, Mustafa, Yushi Miura, Jia Liu, Hassan Bevrani, and Toshifumi Ise. 2020. "A Novel Control Scheme for Multi-Terminal Low-Frequency AC Electrical Energy Transmission Systems Using Modular Multilevel Matrix Converters and Virtual Synchronous Generator Concept" Energies 13, no. 3: 747. https://doi.org/10.3390/en13030747