Adaptive Square-Root Unscented Kalman Filter-Based State-of-Charge Estimation for Lithium-Ion Batteries with Model Parameter Online Identification


Abstract
:1. Introduction
2. Battery Model Development
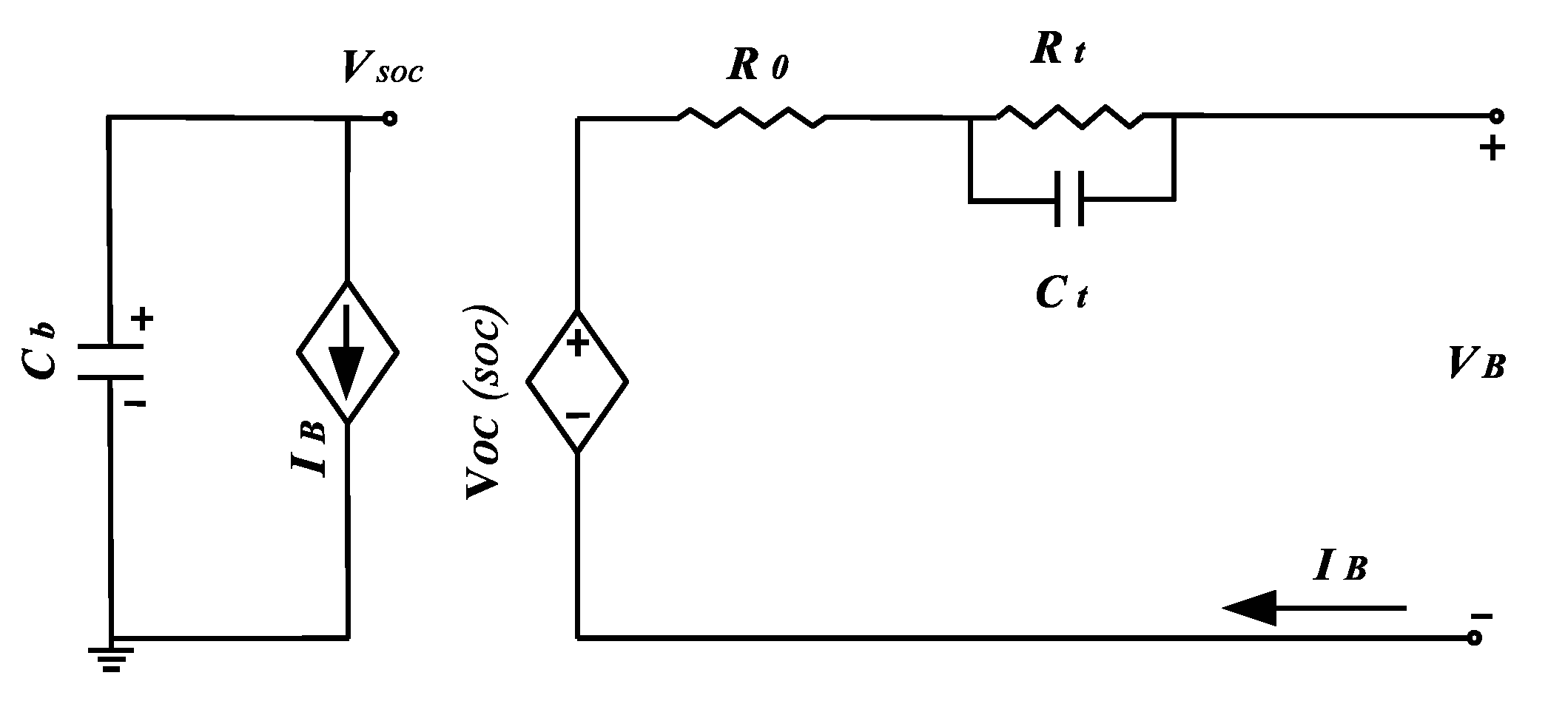
2.1. Battery Equivalent Circuit Model
2.2. Model Discretization
2.3. Observability Analysis
3. Battery SOC and Model Parameter Estimation
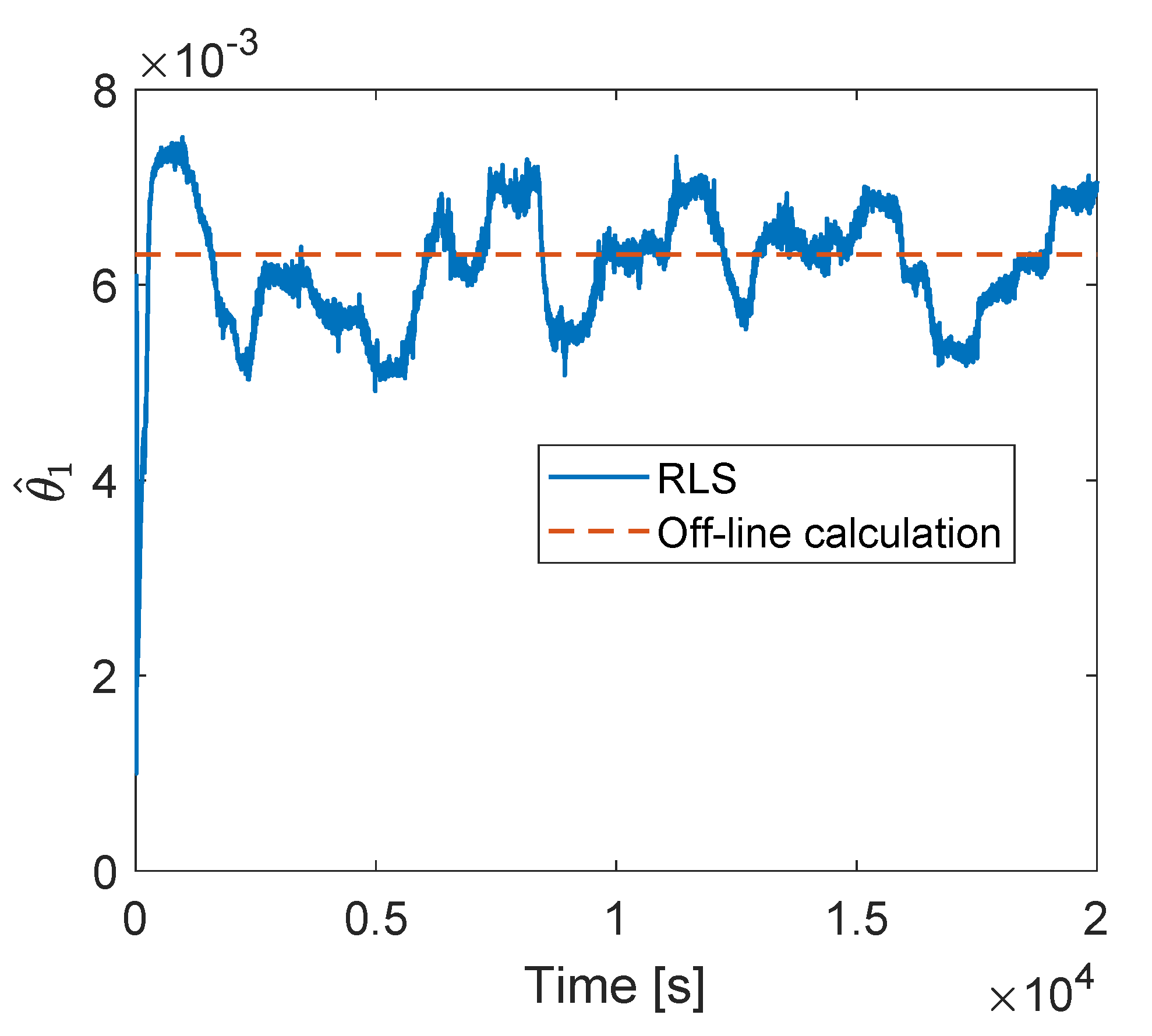
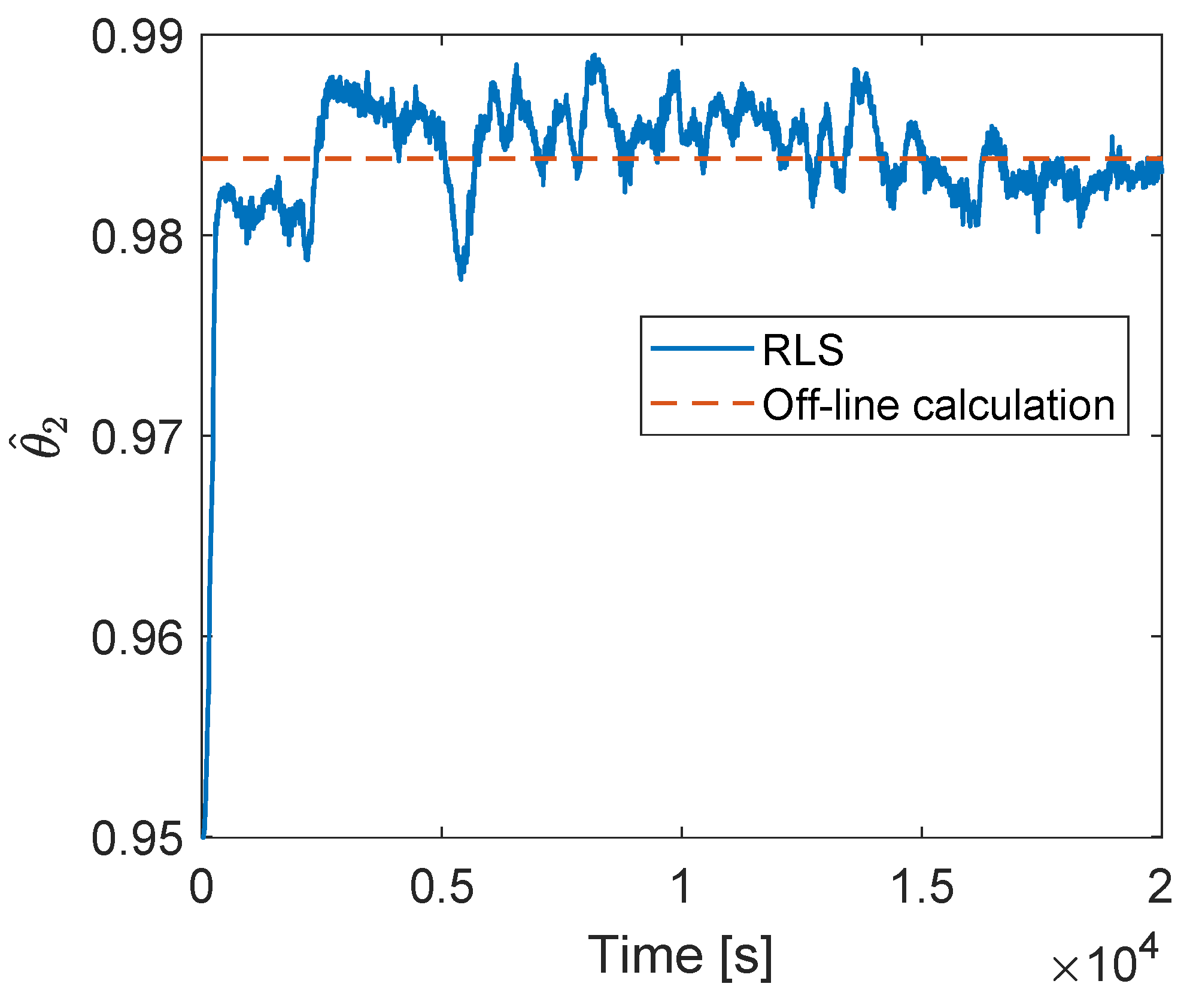
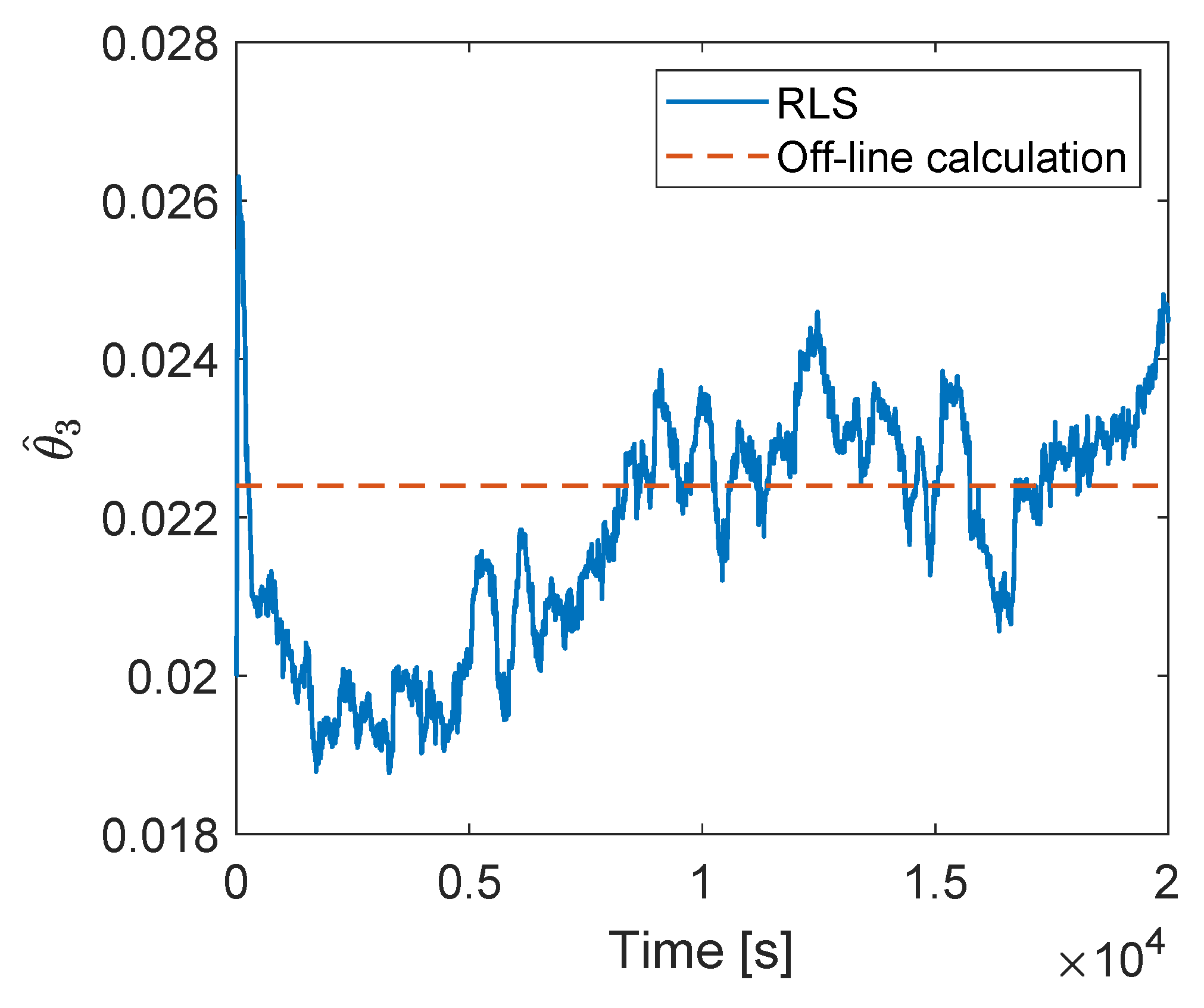
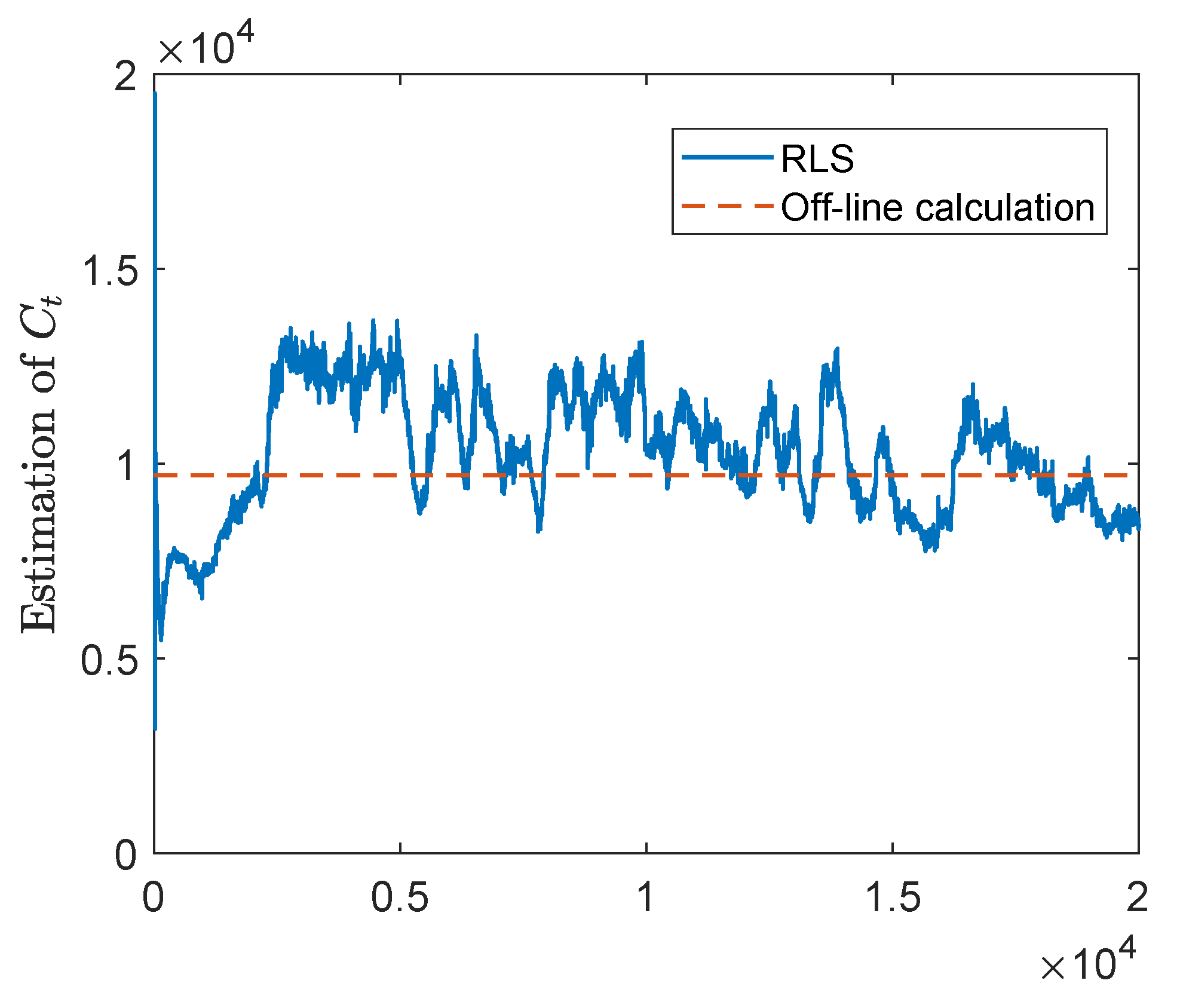
3.1. Model Parameter Identification with Rls Algorithm
3.2. Adaptive Square-Root Ukf Based Soc Estimation
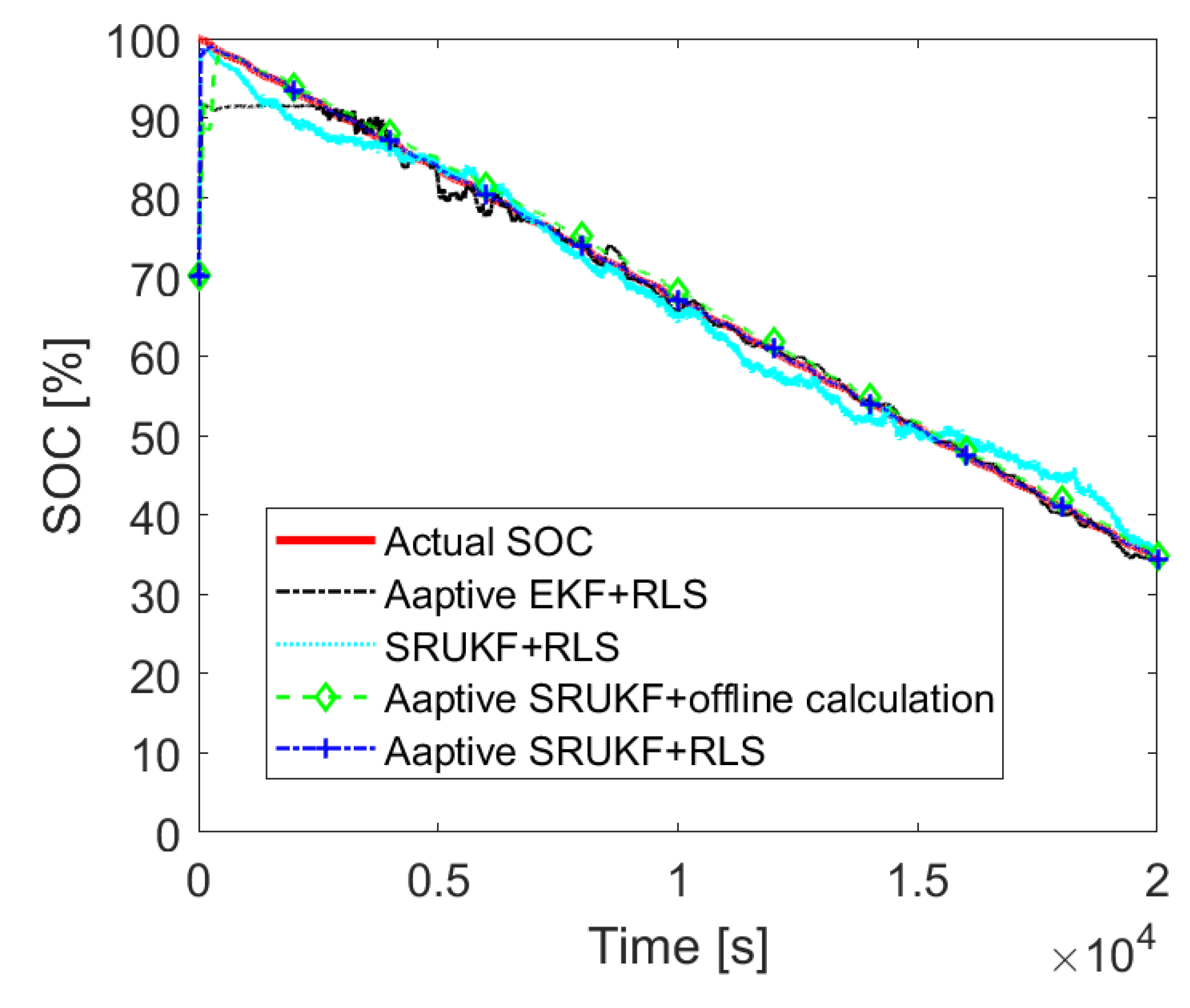
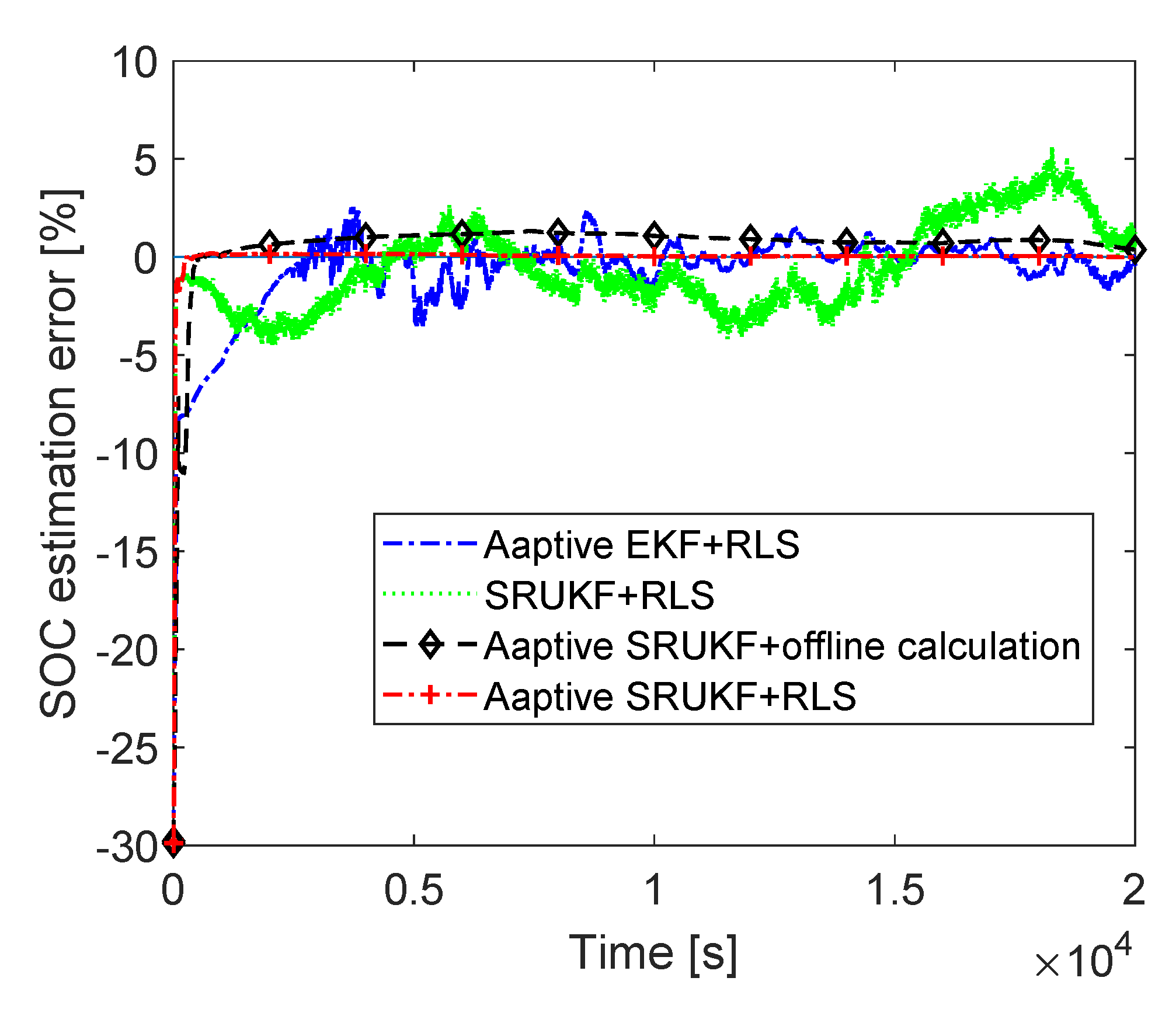
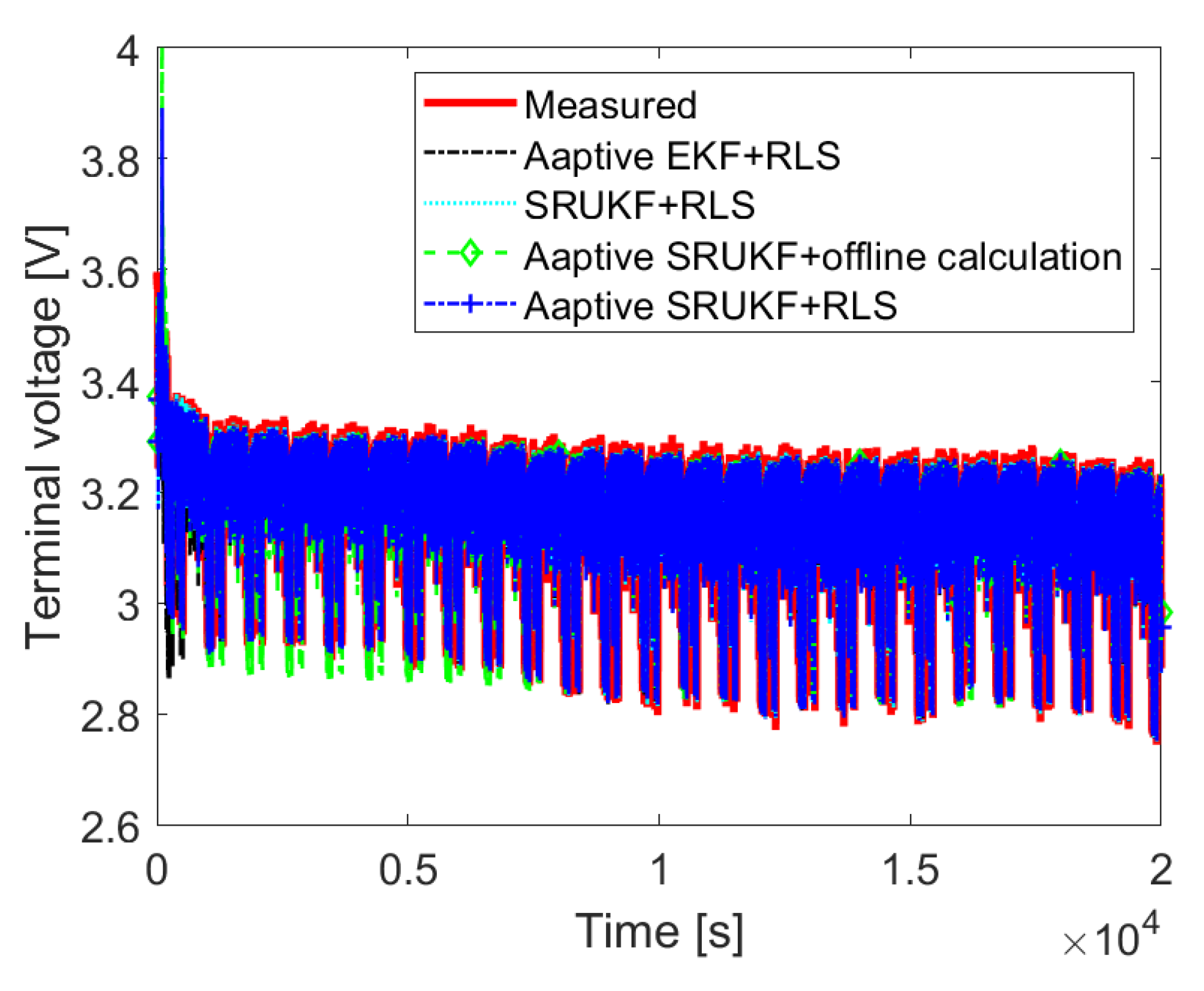
4. Experimental Results
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Tsujikawa, T.; Yabuta, K.; Arakawa, M.; Hayashi, K. Safety of Large-Capacity Lithium-Ion Battery and Evaluation of Battery System for Telecommunications. J. Power Sources 2013, 244, 11–16. [Google Scholar] [CrossRef]
- Ouyang, Q.; Han, W.; Zou, C.; Xu, G.; Wang, Z. Cell Balancing Control For Lithium-Ion Battery Packs: A Hierarchical Optimal Approach. IEEE Trans. Ind. Informatics 2020, 16, 5065–5075. [Google Scholar] [CrossRef]
- Cheng, K.W.E.; Divakar, B.P.; Wu, H.; Ding, K. Battery-Management System(BMS) and SOC Development for Electrical Vehicles. IEEE Trans. Veh. Technol. 2011, 60, 76–88. [Google Scholar] [CrossRef]
- Lee, S.; Kim, J.; Lee, J.; Cho, B.H. State-of-Charge and Capacity Estimation of Lithium-Ion Battery Using A New Open-Circuit Voltage versus State-of-Charge. J. Power Sources 2008, 185, 1367–1373. [Google Scholar] [CrossRef]
- Moura, S.J.; Argomedo, F.B.; Klein, R.A. Mirtabatabaei and M. Krstic, Battery State Estimation for a Single Particle Model With Electrolyte Dynamics. IEEE Trans. Control. Syst. Technol. 2017, 25, 453–468. [Google Scholar] [CrossRef]
- Corno, M.; Bhatt, N.; Savaresi, S.M.; Verhaegen, M. Electrochemical Model-Based State of Charge Estimation for Li-Ion Cells. IEEE Trans. Control. Syst. Technol. 2015, 23, 117–127. [Google Scholar] [CrossRef]
- Chen, M.; Rincon-Mora, G.A. Accurate Electrical Battery Model Capable of Predicting Runtime and I-V Performance. IEEE Trans. Energy Convers. 2006, 21, 504–511. [Google Scholar] [CrossRef]
- Kang, L.; Zhao, X.; Ma, J. A New Neural Network Model for the State-of-Charge Estimation in the Battery Degradation Process. Appl. Energy 2014, 121, 20–27. [Google Scholar] [CrossRef]
- Chen, Z.; Fu, Y.; Mi, C.C. State of Charge Estimation of Lithium-Ion Batteries in Electric Drive Vehicles Using Extended Kalman Filtering. IEEE Trans. Veh. Technol. 2013, 62, 1020–1030. [Google Scholar] [CrossRef]
- Domenico, D.D.; Prada, E.; Creff, Y. An Adaptive Strategy for Li-Ion Battery Internal State Estimation. Control. Eng. Pract. 2013, 21, 1851–1859. [Google Scholar] [CrossRef]
- He, H.; Xiong, R.; Zhang, X.; Su, F. State-of-Charge Estimation of the Lithium-Ion Battery Using An Adaptive Extended Kalman Filter based on An Improved Thevenin Model. IEEE Trans. Veh. Technol. 2011, 60, 1461–1469. [Google Scholar]
- Xiong, R.; Gong, X.; Mi, C.C.; Sun, F. A Robust State-of-Charge Estimator for Multiple Types of Lithium-Ion Batteries Using Adaptive Extended Kalman Filter. J. Power Sources 2013, 243, 805–816. [Google Scholar] [CrossRef]
- Tian, Y.; Xia, B.; Sun, W.; Xu, Z. A Modified Model based State of Charge Estimation of Power Lithium-Ion Batteries Using Unscented Kalman Filter. J. Power Source 2014, 270, 619–626. [Google Scholar] [CrossRef]
- Sun, F.; Hu, X.; Zou, Y.; Li, S. Adaptive Unscented Kalman Filter for State of Charge Estimation of A Lithium-Ion Battery for Electric Vehicles. Energy 2011, 36, 3531–3540. [Google Scholar] [CrossRef]
- Huang, M.; Li, W.; Yan, W. Estimating parameters of synchronous generators using square-root unscented Kalman filter. Electr. Power Syst. Res. 2010, 80, 1137–1144. [Google Scholar] [CrossRef]
- Gholizade-Narm, H.; Charkhgard, M. Lithium-ion battery state of charge estimation based on square-root unscented Kalman filter. IET Power Electron. 2013, 6, 1833–1841. [Google Scholar] [CrossRef]
- Aung, H.; Low, K.S.; Goh, S.T. State-of-Charge Estimation of Lithium-Ion Battery Using Square Root Spherical Unscented Kalman Filter (Sqrt-UKFST) in Nanosatellite. IEEE Trans. Power Electron. 2015, 30, 4774–4783. [Google Scholar] [CrossRef]
- Liu, S.; Cui, N.; Zhang, C. An Adaptive Square Root Unscented Kalman Filter Approach for State of Charge Estimation of Lithium-Ion Batteries. Energies 2017, 10, 1345. [Google Scholar]
- Xu, J.; Mi, C.C.; Cao, B.; Deng, J.; Chen, Z.; Li, S. The State of Charge Estimation of Lithium-Ion Batteries Based on a Proportional-Integral Observer. IEEE Trans. Veh. Technol. 2014, 63, 1614–1621. [Google Scholar]
- Chen, J.; Ouyang, Q.; Xu, C.; Su, H. Neural Network-Based State of Charge Observer Design for Lithium-Ion Batteries. IEEE Trans. Control. Syst. Technol. 2018, 26, 313–320. [Google Scholar] [CrossRef]
- Messier, P.; Nguyen, B.; LeBel, F.; Trovao, J.P.F. Disturbance observer-based state-of-charge estimation for Li-ion battery used in light electric vehicles. J. Energy Storage 2020, 27, 101144. [Google Scholar] [CrossRef]
- Roscher, M.A.; Bohlen, O.S.; Sauer, D.U. Reliable State Estimation of Multicell Lithium-ion Battery Systems. IEEE Trans. Energy Convers. 2011, 26, 737–743. [Google Scholar] [CrossRef]
- Fang, H.; Wang, Y.; Sahinoglu, Z.; Wada, T.; Hara, S. State of Charge Estimation for Lithium-Ion Batteries: An Adaptive Approach. Control. Eng. Pract. 2014, 25, 45–54. [Google Scholar] [CrossRef]
- Partovibakhsh, M.; Liu, G. An Adaptive Unscented Kalman Filtering Approach for Online Estimation of Model Parameters and State-of-Charge of Lithium-Ion Batteries for Autonomous Mobile Robots. IEEE Trans. Control. Syst. Technol. 2015, 23, 357–363. [Google Scholar] [CrossRef]
- Chen, C.; Xiong, R.; Shen, W. A Lithium-ion Battery-in-the Loop Approach to Test and Validate Multiscale Dual H Infinity Filters for State-of-Charge and Capacity Estimation. IEEE Trans. Power Electron. 2018, 33, 332–342. [Google Scholar] [CrossRef]
- Ouyang, Q.; Chen, J.; Zheng, J. State-of-Charging Observer Design for Batteries With On-line Model Parameter Identification: A Robust Approach. IEEE Trans. Power Electron. 2020, 35, 5820–5831. [Google Scholar] [CrossRef]
- Reif, K.; Gunther, S.; Yaz, E.; Unbehauen, R. Stochastic Stability of the Discrete-Time Extended Kalman Filter. IEEE Trans. Autom. Control. 1999, 44, 714–728. [Google Scholar] [CrossRef]
- Rahimi-Eichi, H.; Baronti, F.; Chow, M.Y. Online Adaptive Parameter Identification and State-of-Charge Coestimation for Lithium-Polymer Battery Cells. IEEE Trans. Ind. Electron. 2014, 61, 2053–2061. [Google Scholar] [CrossRef]
- Chen, X.; Shen, W.; Cao, Z.; Kapoor, A. A novel approach for state of charge estimation based on adaptive switching gain sliding mode observer in electric vehicles. J. Power Sources 2014, 246, 667–678. [Google Scholar] [CrossRef]
- Han, J.; Kim, D.; Sunwoo, M. State-of-Charge Estimation of Lead-Acid Batteries Using An Adaptive Extended Kalman Filter. J. Power Sources 2009, 188, 606–612. [Google Scholar] [CrossRef]
- Haykin, S.S. Kalman Filtering and Neural Networks; Wiley: New York, NY, USA, 2001. [Google Scholar]
- Van der Merwe, R.; Wan, E.A. The square-root unscented Kalman filter for state and parameter-estimation. In Proceedings of the IEEE International Conference on Acoustics, Speech, and Signal Processing, Salt Lake City, UT, USA, 7–11 May 2001. [Google Scholar]
- Julier, S.; Uhlmann, J.; Durrant-Whyte, H.F. A new method for the nonlinear transformation of means and covariances in filters and estimators. IEEE Trans. Autom. Control. 2000, 45, 477–482. [Google Scholar] [CrossRef] [Green Version]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Mean | RMS | |
|---|---|---|
| Adaptive EKF + RLS | ||
| SRUKF + RLS | ||
| Adaptive SRUKF + offline calculation | ||
| Adaptive SRUKF + RLS |
| Mean | RMS | |
|---|---|---|
| Adaptive EKF + RLS | ||
| SRUKF + RLS | ||
| Adaptive SRUKF + offline calculation | ||
| Adaptive SRUKF + RLS |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ouyang, Q.; Ma, R.; Wu, Z.; Xu, G.; Wang, Z. Adaptive Square-Root Unscented Kalman Filter-Based State-of-Charge Estimation for Lithium-Ion Batteries with Model Parameter Online Identification. Energies 2020, 13, 4968. https://doi.org/10.3390/en13184968
Ouyang Q, Ma R, Wu Z, Xu G, Wang Z. Adaptive Square-Root Unscented Kalman Filter-Based State-of-Charge Estimation for Lithium-Ion Batteries with Model Parameter Online Identification. Energies. 2020; 13(18):4968. https://doi.org/10.3390/en13184968
Chicago/Turabian StyleOuyang, Quan, Rui Ma, Zhaoxiang Wu, Guotuan Xu, and Zhisheng Wang. 2020. "Adaptive Square-Root Unscented Kalman Filter-Based State-of-Charge Estimation for Lithium-Ion Batteries with Model Parameter Online Identification" Energies 13, no. 18: 4968. https://doi.org/10.3390/en13184968