Sustainable E-Bike Charging Station That Enables AC, DC and Wireless Charging from Solar Energy †

 , , and
, , and
Abstract
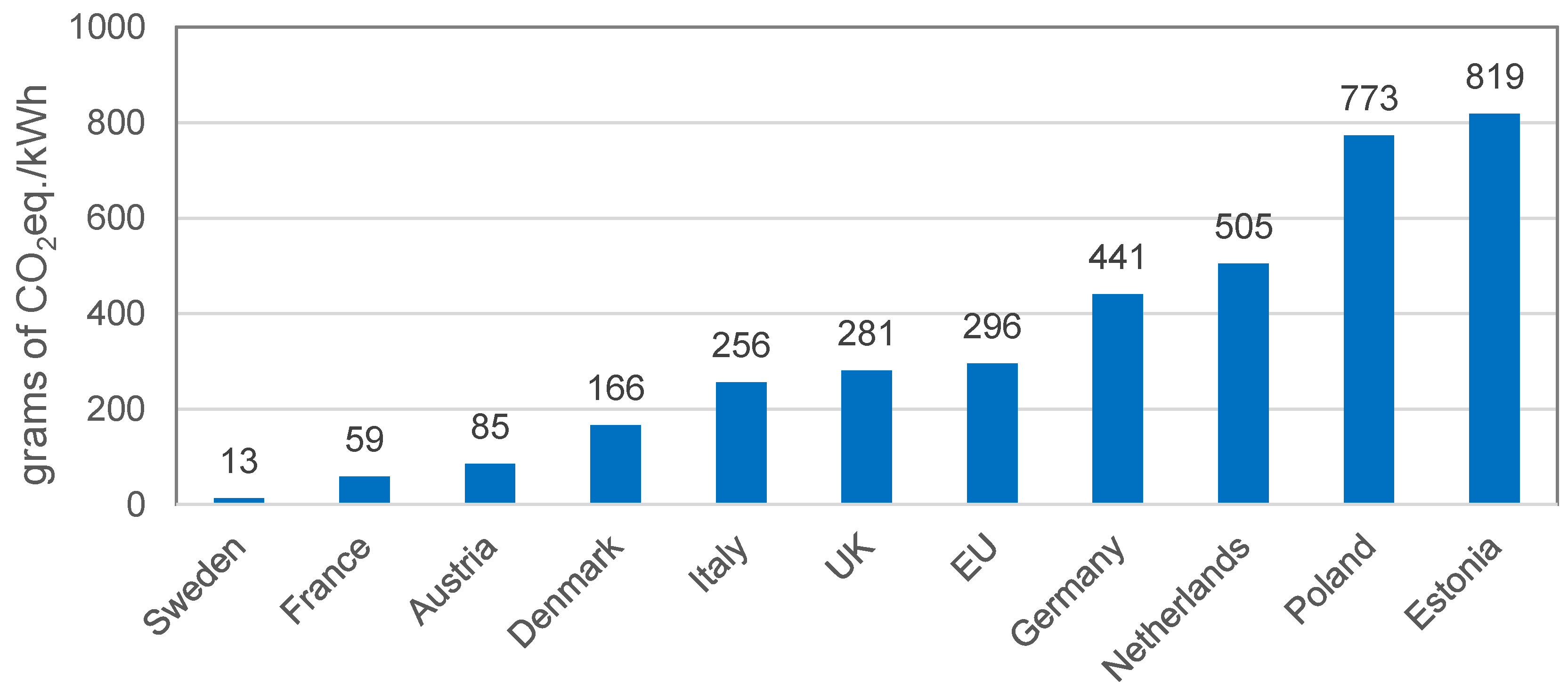
:1. Introduction
- There is excellent synergy between the hours of sunshine and the working hours at workplaces.
- The solar panels can be installed on the large roof area of office buildings, factories, or parking lot. This potential is largely untapped today.
- Reduced peak power and energy demand on the grid as the EV charging power is locally produced from PV [6].
1.1. Electric Bikes and Electric Scooters
1.2. State-of-the-Art
1.3. Contributions
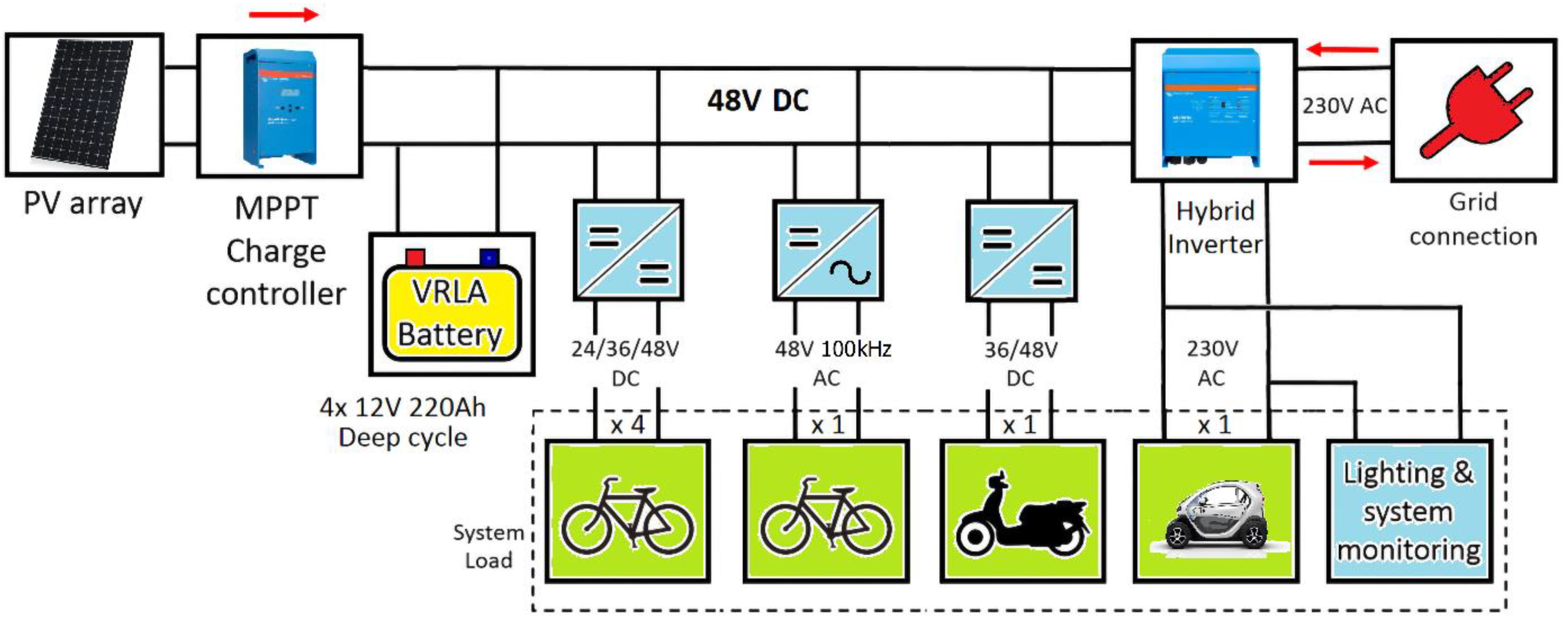
- The station offers three methods for charging the e-bikes, namely AC charging, wireless charging, and direct DC charging. The DC charging is implemented in such a way that users no longer need a power adapter and only a DC cable for charging.
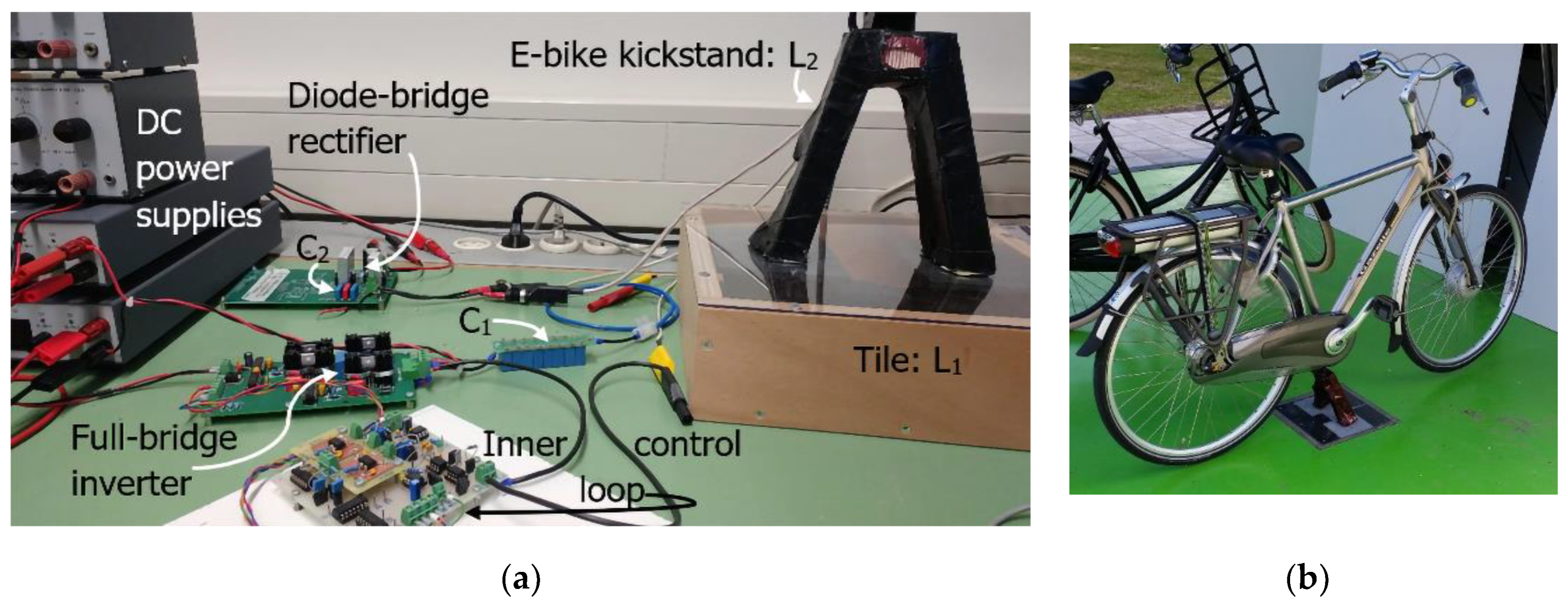
- Wireless charging of e-bikes is possible via inductive coils made of ferromagnetic material with the transmitter coil located under the floor tile of the station, and the receiver coil is integrated into the bike kickstand. In this way, the kickstand of the bike is used for both parking, wireless charging, and communication. A novel auto-resonant frequency control is developed for misalignment tolerance of wireless charging.
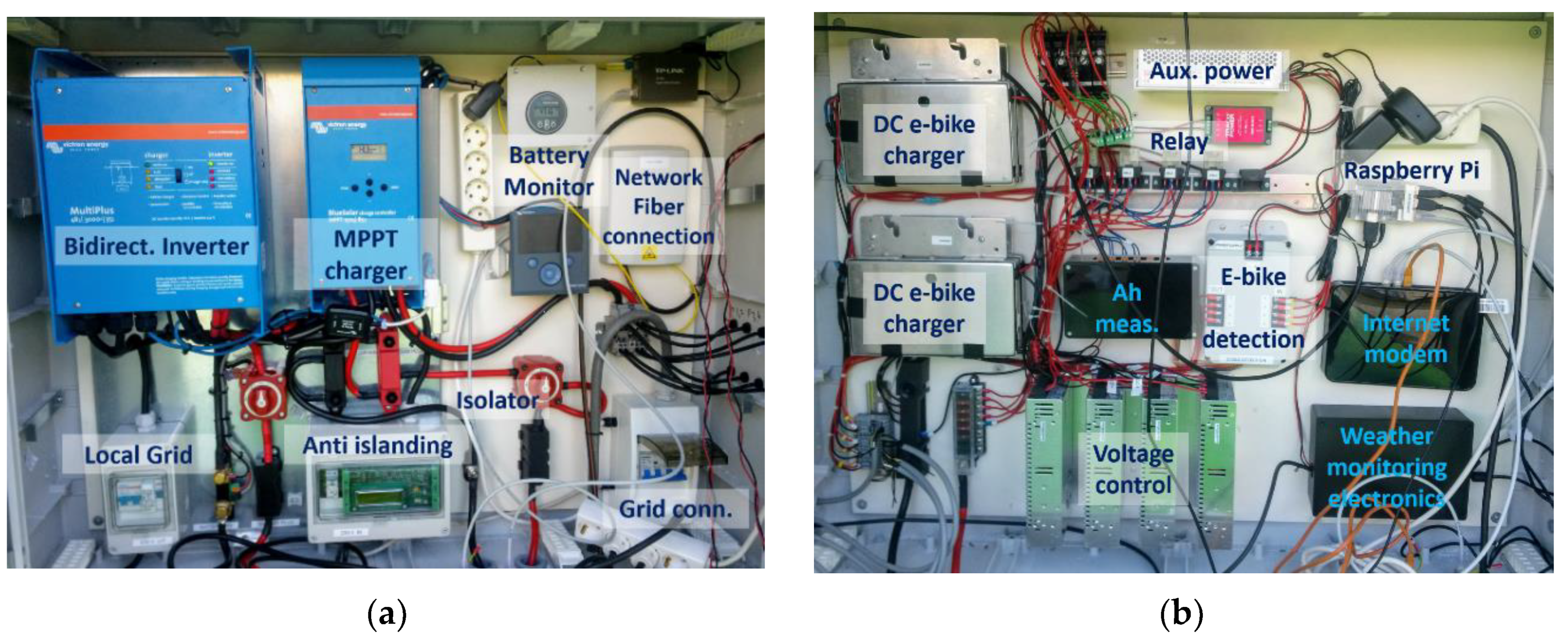
- The charging station has a bidirectional hybrid inverter and an integrated storage on a DC nano-grid, which facilitates both grid-connected and off-grid operation [37].
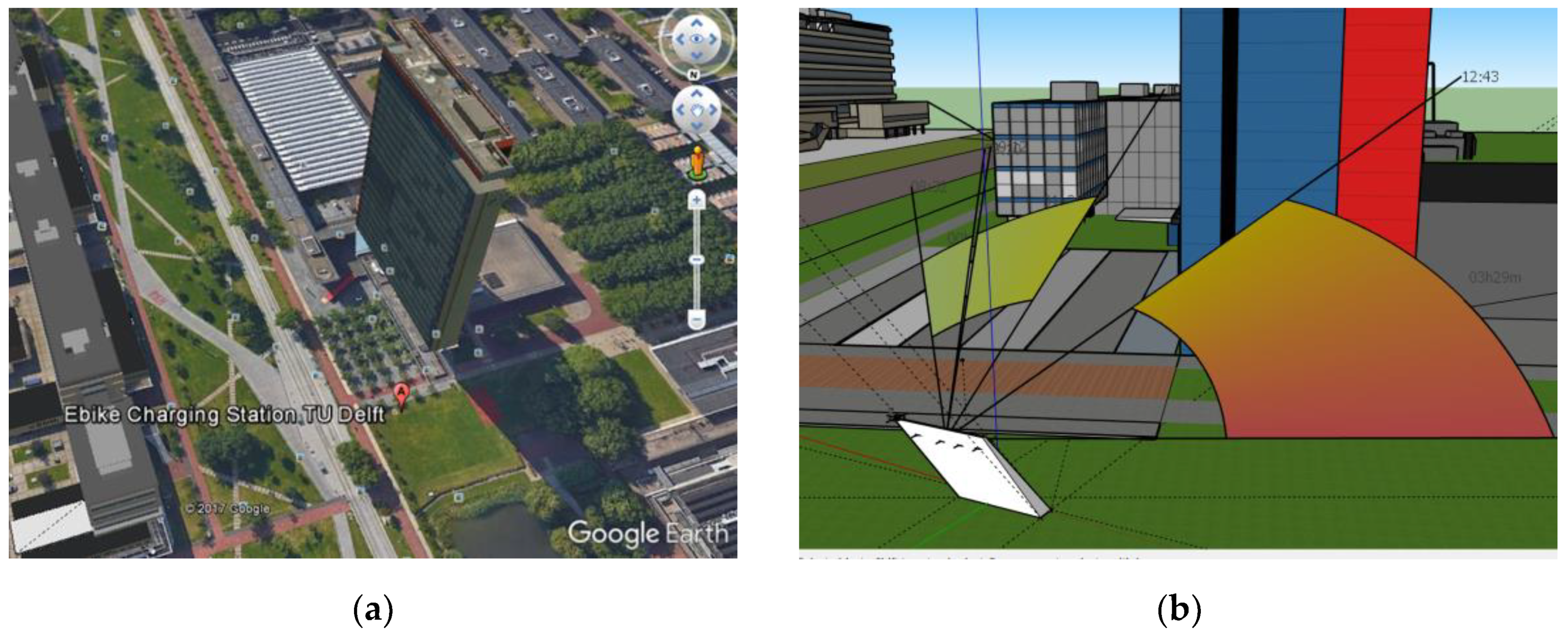
- 3D modelling via Sketchup is used for PV shading analysis of the built environment, which provides much higher accuracy of yield estimation than the methods used in Reference [14].
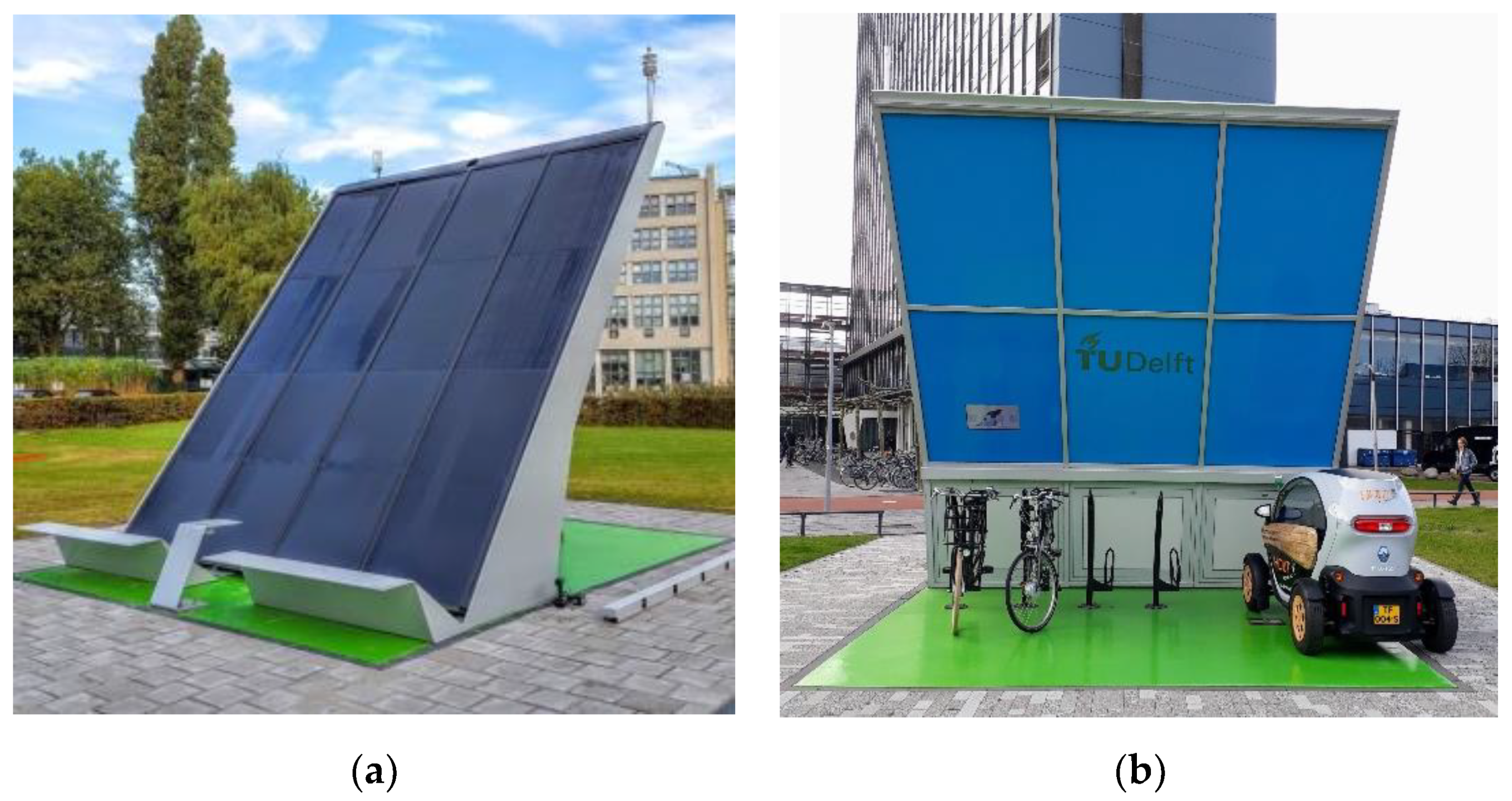
- The physical structure of the charging station and the electrical design are cohesively integrated, which results in an environmentally-integrated PV system (EIPV), which is ergonomic, modular, safe, and designed for outdoor weather conditions. The EIPV provides 3-m3 internal cabinet space for all electronics, which removes the need for additional cabinets and, hence, increases the overall aesthetics.
1.4. Structure of the Paper
2. Solar E-Bike Charging Station
2.1. System Design
2.2. Charging Demand
2.3. Local Storage
3. PV System Design
3.1. PV System Modelling
3.2. PV System Orientation
3.3. Optimal PV System Design
3.4. Shading Analysis
3.5. PV System Yield
4. AC E-Bike Charging
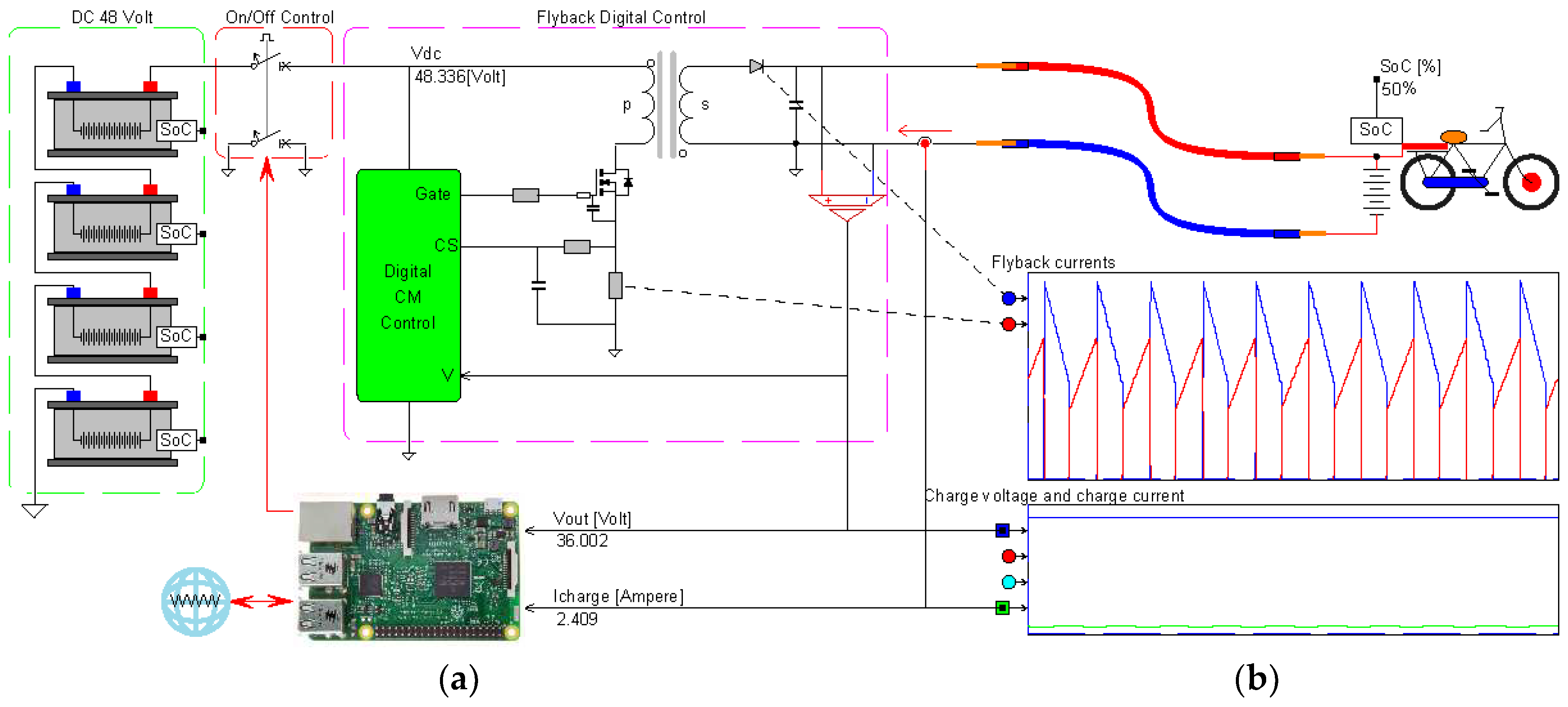
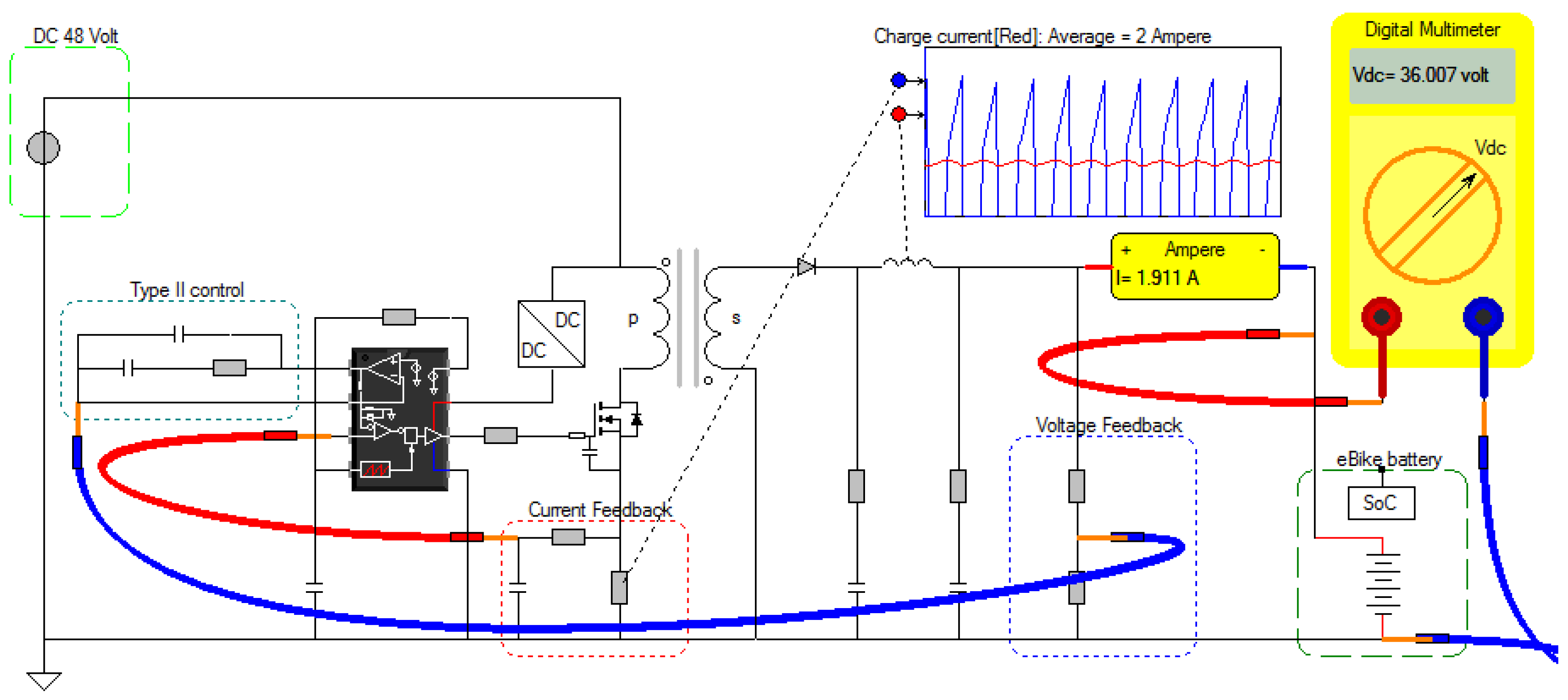
5. DC E-Bike Charging
5.1. Current Mode Control
5.2. Design and Simulation of the Flyback DC Charger
5.3. Safety and Monitoring
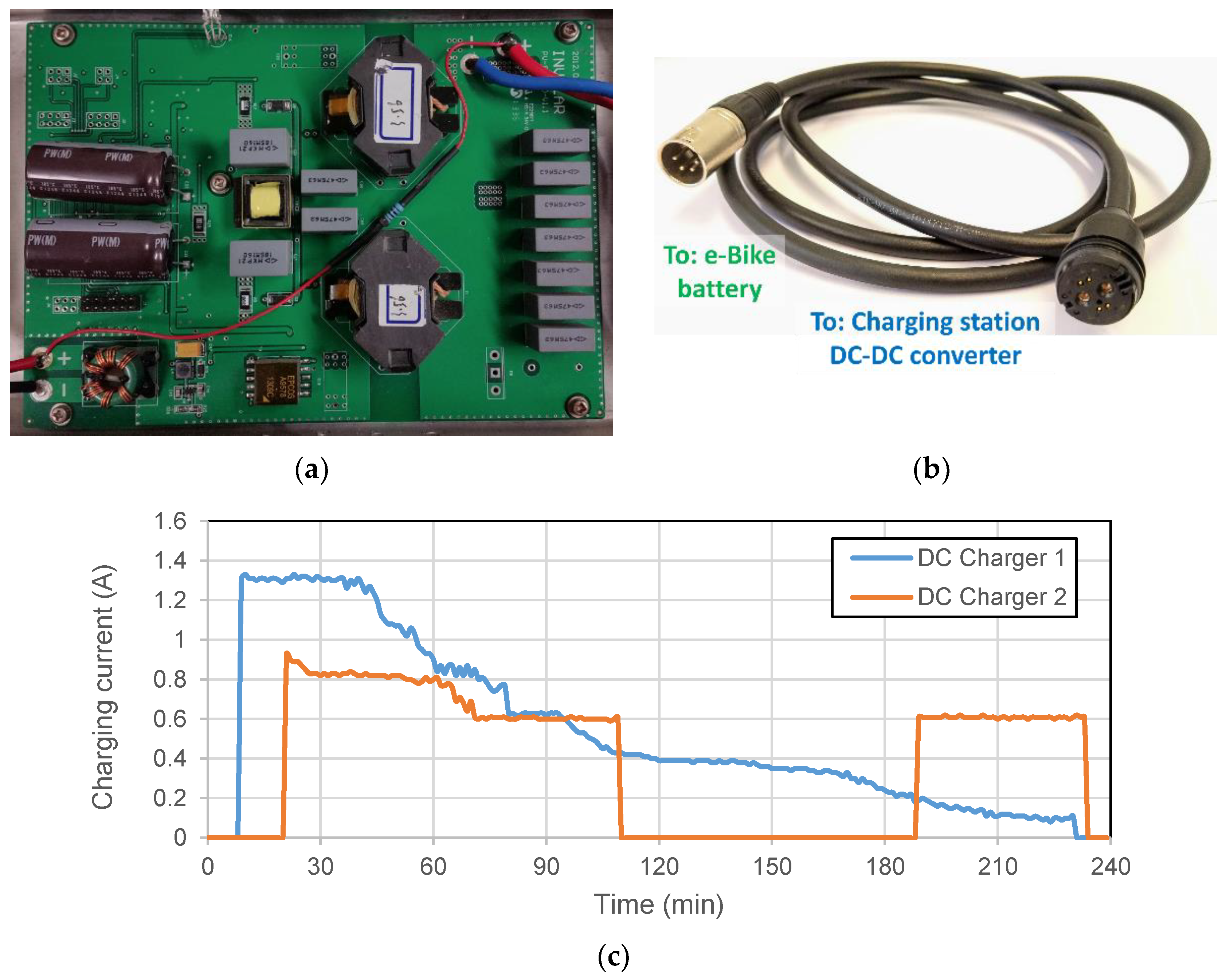
5.4. Hardware Realization and Losses
5.5. Battery Connection Communication
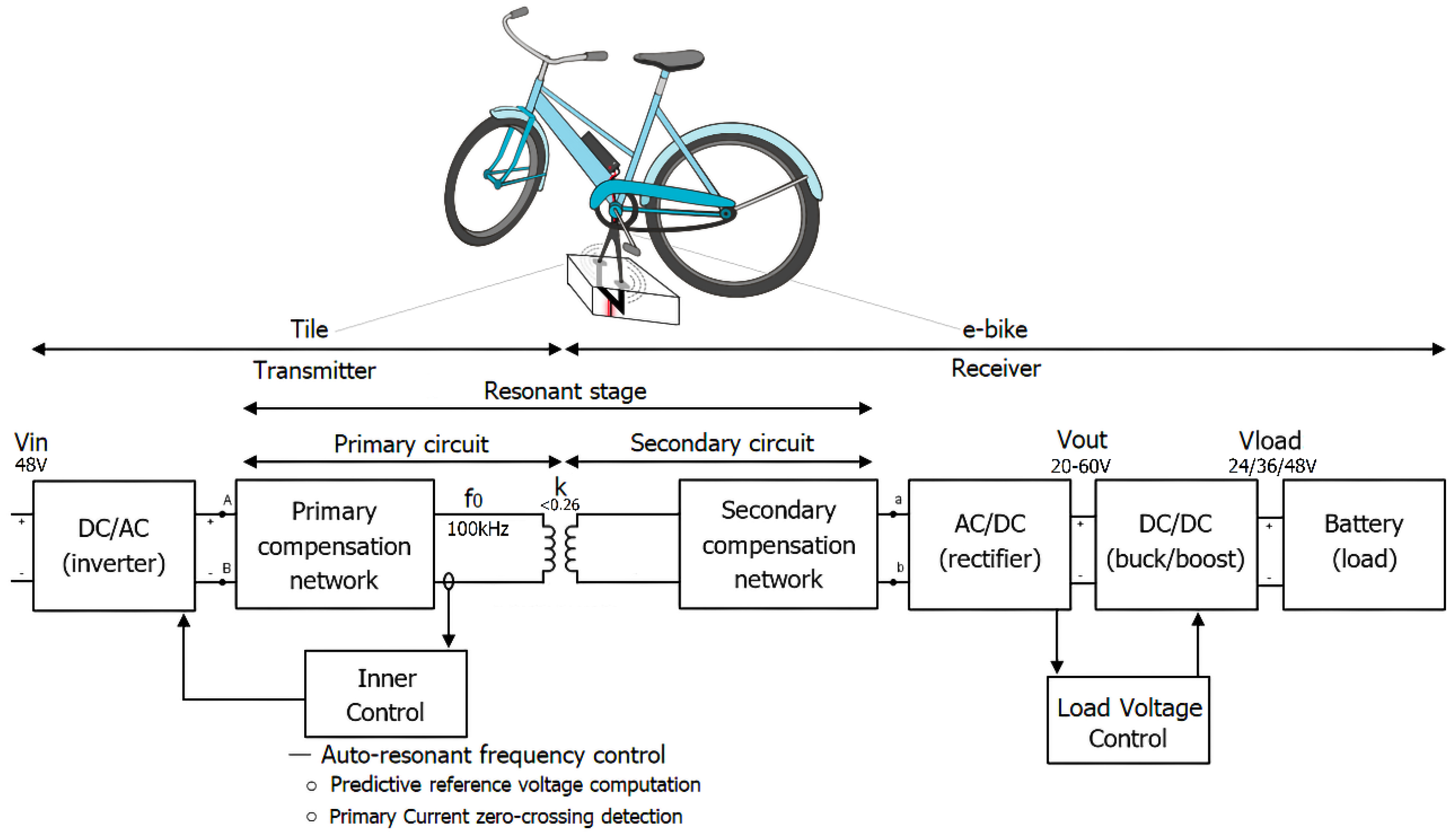
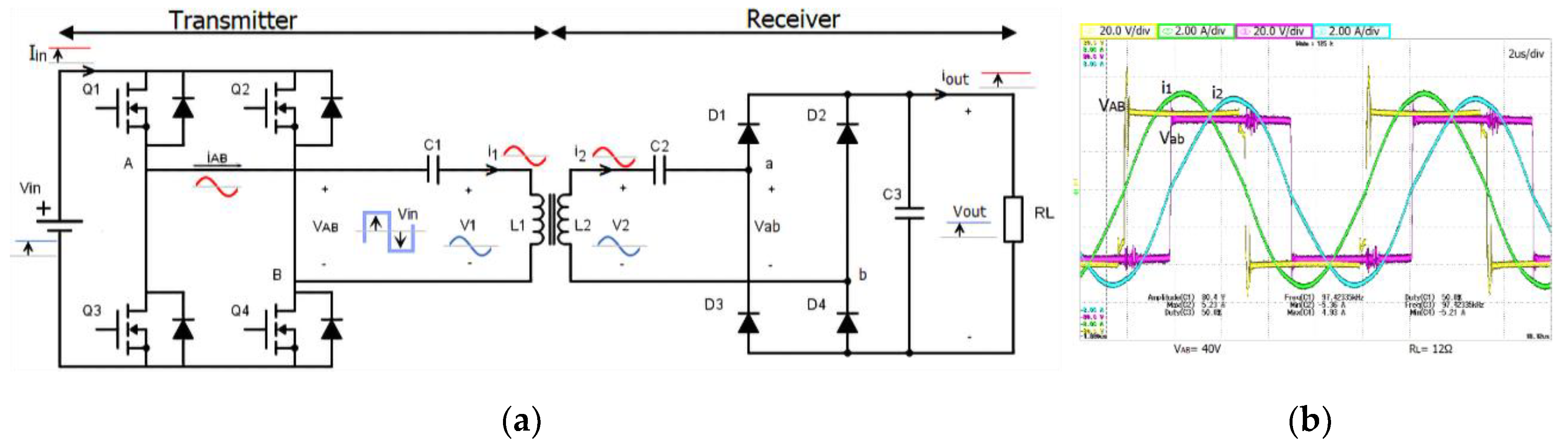
6. Wireless E-Bike Charging
6.1. Wireless Power Transfer via Resonant Circuit
6.2. Variable Frequency for Misalignment Tolerance
6.3. Communication with the Bike and Foreign Object Identification
6.4. Experimental Realization
6.5. Ongoing Development
7. Environment Integrated PV System
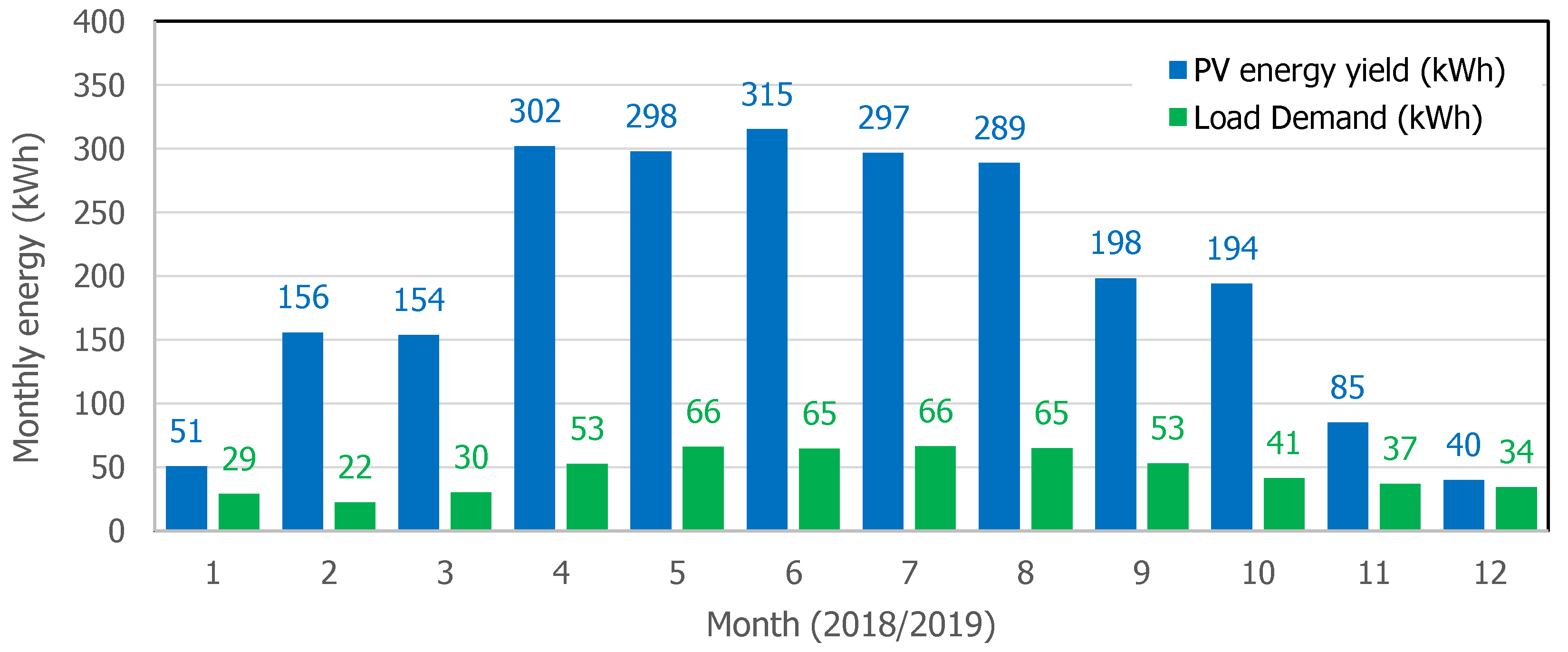
7.1. Energy Yield of the PV System and Load
7.2. Power Management of the Battery
- The PV power is primarily used to provide the e-bike charging load and the baseload
- If the available PV power is less than the load demand, then the demand is first supplied by the battery. If the battery becomes empty, then the load is supplied by the grid.
- If the available PV power is more than the demand, then the excess PV power is first used to charge the battery. If the battery is nearly full, then the PV power is fed to the AC grid.
- When the battery SOC > 50%, the battery and PV power together feed at least 400 W to the AC grid in order to utilize the battery in order to store the solar power the next day.
8. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Messagie, M.; Boureima, F.-S.S.; Coosemans, T.; Macharis, C.; Mierlo, J. Van A range-based vehicle life cycle assessment incorporating variability in the environmental assessment of different vehicle technologies and fuels. Energies 2014, 7, 1467–1482. [Google Scholar] [CrossRef]
- Moro, A.; Lonza, L. Electricity carbon intensity in European Member States: Impacts on GHG emissions of electric vehicles. Transp. Res. Part D Transp. Environ. 2018. [Google Scholar] [CrossRef] [PubMed]
- Dataset nrg_105a: Supply, Transformation and Consumption of Electricity—Annual Data, Statistical Office of the European Union (EUROSTAT); Eurostat: Luxembourg, 2016.
- Hamilton, C.; Gamboa, G.; Elmes, J.; Kerley, R.; Arias, A.; Pepper, M.; Shen, J.; Batarseh, I. System architecture of a modular direct-DC PV charging station for plug-in electric vehicles. In Proceedings of the Annual Conference on IEEE Industrial Electronics Society, Glendale, AZ, USA, 7–10 November 2010; pp. 2516–2520. [Google Scholar]
- Carli, G.; Williamson, S.S. Technical Considerations on Power Conversion for Electric and Plug-in Hybrid Electric Vehicle Battery Charging in Photovoltaic Installations. IEEE Trans. Power Electron. 2013, 28, 5784–5792. [Google Scholar] [CrossRef]
- Chandra Mouli, G.R.; Bauer, P.; Zeman, M. System design for a solar powered electric vehicle charging station for workplaces. Appl. Energy 2016, 168, 434–443. [Google Scholar] [CrossRef] [Green Version]
- Birnie, D.P. Solar-to-vehicle (S2V) systems for powering commuters of the future. J. Power Sour. 2009, 186, 539–542. [Google Scholar] [CrossRef]
- Lai, C.S.; McCulloch, M.D. Levelized cost of electricity for solar photovoltaic and electrical energy storage. Appl. Energy 2017. [Google Scholar] [CrossRef]
- Chandra Mouli, G.R.; Leendertse, M.; Prasanth, V.; Bauer, P.; Silvester, S.; van de Geer, S.; Zeman, M. Economic and CO2 Emission Benefits of a Solar Powered Electric Vehicle Charging Station for Workplaces in the Netherlands. In Proceedings of the IEEE Transportation Electrification Conference and Expo (ITEC), Dearborn, MI, USA, 27–29 June 2016; pp. 1–7. [Google Scholar]
- Chandra Mouli, G.R.; Schijffelen, J.; Van Den Heuvel, M.; Kardolus, M.; Bauer, P. A 10 kW Solar-Powered Bidirectional EV Charger Compatible with Chademo and COMBO. IEEE Trans. Power Electron. 2019, 34, 1082–1098. [Google Scholar] [CrossRef] [Green Version]
- Fairley, P. China’s cyclists take charge: Electric bicycles are selling by the millions despite efforts to ban them. IEEE Spectr. 2005, 42, 54–59. [Google Scholar] [CrossRef]
- Mobiliteit in Cijfers Tweewielers 2017–2018, Stichting BOVAG-RAI Mobiliteit, Amsterdam; Amsterdam Foundation: Amsterdam, The Netherlands, 2017.
- Apostolou, G.; Reinders, A.; Geurs, K. An Overview of Existing Experiences with Solar-Powered e-Bikes. Energies 2018, 11, 2129. [Google Scholar] [CrossRef] [Green Version]
- Chandra Mouli, G.R.; van Duijsen, P.; Velzeboer, T.; Nair, G.; Zhao, Y.; Jamodkar, A.; Isabella, O.; Silvester, S.; Bauer, P.; Zeman, M. Solar Powered E-Bike Charging Station with AC, DC and Contactless Charging. In Proceedings of the European Conference on Power Electronics and Applications (EPE’18 ECCE Europe), Riga, Latvia, 17–21 September 2018. [Google Scholar]
- Mesentean, S.; Feucht, W.; Mittnacht, A.; Frank, H. Scheduling Methods for Smart Charging of Electric Bikes from a Grid-Connected Photovoltaic-System. In Proceedings of the 2011 UKSim 5th European Symposium on Computer Modeling and Simulation, Madrid, Spain, 16–18 November 2011; pp. 299–304. [Google Scholar]
- Fuentes, M.; Fraile-Ardanuy, J.; Risco-Martín, J.L.; Moya, J.M. Feasibility Study of a Building-Integrated PV Manager to Power a Last-Mile Electric Vehicle Sharing System. Int. J. Photoenergy 2017. [Google Scholar] [CrossRef] [Green Version]
- Zhang, Z.; Gercek, C.; Renner, H.; Reinders, A.; Fickert, L. Resonance instability of photovoltaic E-bike charging stations: Control parameters analysis, modeling and experiment. Appl. Sci. 2019, 9, 252. [Google Scholar] [CrossRef] [Green Version]
- Thomas, D.; Klonari, V.; Vallee, F.; Ioakimidis, C.S. Implementation of an e-bike sharing system: The effect on low voltage network using pv and smart charging stations. In Proceedings of the 2015 International Conference on Renewable Energy Research and Applications, ICRERA 2015, Palermo, Italy, 22–25 November 2015; pp. 572–577. [Google Scholar]
- Kulshrestha, P.; Wang, L.; Chow, M.Y.M.-Y.; Lukic, S. Intelligent energy management system simulator for PHEVs at municipal parking deck in a smart grid environment. In Proceedings of the 2009 IEEE Power and Energy Society General Meeting, PES ’09, Calgary, AB, Canada, 26–30 July 2009; pp. 1–6. [Google Scholar]
- Zhou, W.; Wattenberg, M.U.S. Design Considerations of a Single Stage LLC Battery Charger. In Proceedings of the PCIM Europe; International Exhibition and Conference for Power Electronics, Intelligent Motion, Renewable Energy and Energy Management, Nuremberg, Germany, 7–9 May 2019. [Google Scholar]
- Nguyen, C.-L.; Primiani, P.; Viglione, L.; Woodward, L. A Low-Cost Battery Charger Usable with Sinusoidal Ripple-Current and Pulse Charging Algorithms for E-Bike Applications. In Proceedings of the 2019 IEEE 28th International Symposium on Industrial Electronics (ISIE), Vancouver, BC, Canada, 12–14 June 2019; pp. 2085–2090. [Google Scholar]
- Chandra Mouli, G.R.; Bauer, P.; Zeman, M. Comparison of system architecture and converter topology for a solar powered electric vehicle charging station. In Proceedings of the International Conference on Power Electronics and ECCE Asia (ICPE-ECCE Asia), Seoul, Korea, 1–5 June 2015; pp. 1908–1915. [Google Scholar]
- Vega-Garita, V.; Ramirez-Elizondo, L.; Chandra Mouli, G.R.; Bauer, P. Review of residential PV-storage architectures. In Proceedings of the 2016 IEEE International Energy Conference (ENERGYCON), Leuven, Belgium, 4–8 April 2016; pp. 1–6. [Google Scholar] [CrossRef] [Green Version]
- Pellitteri, F.; Boscaino, V.; Di Tommaso, A.O.; Genduso, F.; Miceli, R. E-bike battery charging: Methods and circuits. In Proceedings of the 2013 International Conference on Clean Electrical Power (ICCEP), Alghero, Italy, 11–13 June 2013; pp. 107–114. [Google Scholar]
- Pellitteri, F.; Di Tommaso, A.O.; Miceli, R. Investigation of inductive coupling solutions for E-bike wireless charging. In Proceedings of the Universities Power Engineering Conference, Computer Society, Stoke on Trent, UK, 1–4 September 2015. [Google Scholar]
- Genco, F.; Longo, M.; Patrizia Livrieri, A.T. Wireless Power Transfer System Stability Analysis for E-bikes Application. In Proceedings of the AEIT International Conference of Electrical and Electronic Technologies for Automotive (AEIT AUTOMOTIVE), Torino, Italy, 2–4 July 2019. [Google Scholar]
- Joseph, P.K.; Elangovan, D.; Arunkumar, G. Linear control of wireless charging for electric bicycles. Appl. Energy 2019, 255, 113898. [Google Scholar] [CrossRef]
- Livreri, P.; Di Dio, V.; Miceli, R.; Pellitteri, F.; Galluzzo, G.R.; Viola, F. Wireless battery charging for electric bicycles. In Proceedings of the 2017 6th International Conference on Clean Electrical Power (ICCEP), Santa Margherita Ligure, Italy, 27–29 June 2017; pp. 602–607. [Google Scholar]
- Pellitteri, F.; Ala, G.; Caruso, M.; Ganci, S.; Miceli, R. Physiological compatibility of wireless chargers for electric bicycles. In Proceedings of the 2015 International Conference on Renewable Energy Research and Applications, ICRERA 2015, Palermo, Italy, 22–25 November 2015; pp. 1354–1359. [Google Scholar]
- Iannuzzi, D.; Rubino, L.; Di Noia, L.P.; Rubino, G.; Marino, P. Resonant inductive power transfer for an E-bike charging station. Electr. Power Syst. Res. 2016. [Google Scholar] [CrossRef]
- Chen, Y.; Kou, Z.; Zhang, Y.; He, Z.; Mai, R.; Cao, G. Hybrid Topology With Configurable Charge Current and Charge Voltage Output-Based WPT Charger for Massive Electric Bicycles. IEEE J. Emerg. Sel. Top. Power Electron. 2018, 6, 1581–1594. [Google Scholar] [CrossRef]
- Kindl, V.; Pechanek, R.; Zavrel, M.; Kavalir, T. Inductive coupling system for E-bike wireless charging. In Proceedings of the 12th International Conference ELEKTRO 2018, Mikulov, Czech Republic, 21–23 May 2018; pp. 1–4. [Google Scholar]
- Coppola, M.; Cennamo, P.; Dannier, A.; Iannuzzi, D.; Meo, S. Wireless Power Transfer circuit for e-bike battery charging system. In Proceedings of the 2018 IEEE International Conference on Electrical Systems for Aircraft, Railway, Ship Propulsion and Road Vehicles and International Transportation Electrification Conference, ESARS-ITEC, Nottingham, UK, 7–9 November 2018. [Google Scholar]
- Lee, J.; Lee, S.; Kwak, M.; Yeom, G. Seung-Hwan Lee Development of a Wireless Power Supply System for an E-Bike. In Proceedings of the 10th International Conference on Power Electronics and ECCE Asia (ICPE 2019—ECCE Asia), Busan, Korea, 27–30 May 2019. [Google Scholar]
- Joseph, P.K.; Elangovan, D. A review on renewable energy powered wireless power transmission techniques for light electric vehicle charging applications. J. Energy Storage 2018, 16, 145–155. [Google Scholar] [CrossRef]
- Nunes, P.; Figueiredo, R.; Brito, M.C. The use of parking lots to solar-charge electric vehicles. Renew. Sustain. Energy Rev. 2016, 66, 679–693. [Google Scholar] [CrossRef]
- Mackay, L.; Hailu, T.G.; Chandra Mouli, G.R.; Ramirez-Elizondo, L.; Ferreira, J.A.; Bauer, P. From DC Nano- and Microgrids Towards the Universal DC Distribution System—A Plea to Think Further Into the Future. In Proceedings of the 2015 IEEE Power & Energy Society General Meeting, Denver, CO, USA, 26–30 July 2015; pp. 1–5. [Google Scholar]
- Victron Energy. Datasheet—MultiPlus 48/3000/35-16; BlueSolar Charger MPPT 150/85; Victron Energy: Almere, The Netherlands, 2019. [Google Scholar]
- Lufft. Datsheet. WS503-UMB Smart Weather Sensor. Available online: https://www.lufft.com/products/compact-weather-sensors-293/ws503-umb-smart-weather-sensor-1837/productAction/outputAsPdf/ (accessed on 1 July 2020).
- Chao, D.C.-H.; van Duijsen, P.J.; Hwang, J.J.; Liao, C.-W. Modeling of a Taiwan fuel cell powered scooter. In Proceedings of the 2009 International Conference on Power Electronics and Drive Systems (PEDS), Taipei, Taiwan, 2–5 November 2009; pp. 913–919. [Google Scholar]
- CESAR Database, Koninklijk Nederlands Meteorologisch Instituut (KNMI). Available online: http://www.knmi.nl (accessed on 1 July 2020).
- Paulescu, M.; Paulescu, E.; Gravila, P.; Badescu, V. Weather Modeling and Forecasting of PV Systems Operation. Green Energy Technol. 2013, 103. [Google Scholar] [CrossRef]
- Braun, J.E.; Mitchell, J.C. Solar geometry for fixed and tracking surfaces. Sol. Energy 1983, 31, 439–444. [Google Scholar] [CrossRef]
- Reda, I.; Andreas, A. Solar position algorithm for solar radiation applications. Sol. Energy 2004, 76, 577–589. [Google Scholar] [CrossRef]
- Jakhrani, A.Q.; Othman, A.K.; Rigitand, A.R.H.; Samo, S.R. Comparison of solar photovoltaic module temperature models. World Appl. Sci. J. 2011, 14, 1–8. [Google Scholar]
- Isabella, O.; Nair, G.G.; Tozzi, A.; Castro Barreto, J.H.; Chandra Mouli, G.R.; Lantsheer, F.; van Berkel, S.; Zeman, M. Comprehensive modelling and sizing of PV systems from location to load. MRS Proc. 2015, 1771, 1–7. [Google Scholar] [CrossRef] [Green Version]
- Smets, A.; Jäger, K.; Isabella, O.; van Swaaij, R.; Zeman, M. Solar Energy: The Physics and Engineering of Photovoltaic Conversion, Technologies and Systems; UIT: Cambridge, UK, 2016; ISBN 9780203841464. [Google Scholar]
- Involar Micro-Inverters; Involar Corporation Ltd.: Pudong District, Shanghai, China.
- Ridley, R.B. Power Supply Design, Volume 1: Control; Ridley Designs: Camarillo, CA, USA, 2012; ISBN 9780983318002. [Google Scholar]
- Caspoc; Simulation Research: Alphen aan den Rijn, The Netherlands, 2019; Available online: www.caspoc.com (accessed on 1 July 2020).
- Bauer, P.; Van Duijsen, P.J. Challenges and Advances in Simulation. In Proceedings of the IEEE 36th Conference on Power Electronics Specialists, Recife, Brazil, 12–16 June 2005; pp. 1030–1036. [Google Scholar]
- Van Duijsen, P.; Woudstra, J.; Van Willigenburg, P. Educational setup for Power Electronics and IoT. In Proceedings of the 2018 19th International Conference on Research and Education in Mechatronics, REM 2018, Delft, The Netherlands, 7–8 June 2018. [Google Scholar]
- Chandra Mouli, G.R.; Kaptein, J.; Bauer, P.; Zeman, M. Implementation of dynamic charging and V2G using Chademo and CCS/Combo DC charging standard. In Proceedings of the IEEE Transportation Electrification Conference and Expo (ITEC), Dearborn, MI, USA, 27–29 June 2016; pp. 1–6. [Google Scholar]
- Grazian, F.; Duijsen, P.; Thiago, B.; Soeiro, P.B. Advantages and Tuning of Zero Voltage Switching in a Wireless Power Transfer System. In Proceedings of the IEEE PELS Workshop on Emerging Technologies: Wireless Power (WoW), London, UK, 17–23 June 2019. [Google Scholar]
- Xu, H.; Wang, C.; Xia, D.; Liu, Y. Design of Magnetic Coupler for Wireless Power Transfer. Energies 2019, 12, 3000. [Google Scholar] [CrossRef] [Green Version]
- Zeng, H.; Liu, Z.; Hou, Y.; Hei, T.; Zhou, B. Optimization of Magnetic Core Structure for Wireless Charging Coupler. IEEE Trans. Magn. 2017. [Google Scholar] [CrossRef]
- Society of Automotive Engineers (SAE). J2954—Wireless Power Transfer for LightDuty Plug-In/ Electric Vehicles and Alignment Methodology. SAE Int. 2019. Available online: https://www.sae.org/standards/content/j2954_201605/ (accessed on 1 July 2020).
- TU Delft Solar e-Bike Charging Station. Available online: http://solarpoweredbikes.tudelft.nl (accessed on 1 July 2020).
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Solar panels | 8× Sunpower X20-327-BLK, 327 W |
| Battery | 4× Victron Lead Acid Batteries, 220 Ah, 12 V |
| MPPT converter | Victron BlueSolar 150/85 |
| Grid Inverter | Victron Multiplus 48/3000 Bidirectional |
| Weather station | Lufft WS503-UMB |
| Controller | Raspberry Pi |
| e-bike Charging | 1× AC, 4× DC (10–50 V), 1× Wireless |
| DC charging | 100 W, 24–48 V, with isolation |
| Wireless charging | 200 W, 24–48 V, via kickstand |
| Model | E-Bike | E-Scooter | Small Car |
|---|---|---|---|
| Batavus Trento E-go | Novox C-50 | Renault Twizy | |
| Battery type | Lithium-ion | Lithium-ion | Lithium-ion |
| Capacity (Wh) | 396 | 1920 | 6100 |
| Voltage (V) | 36 | 48 | 58 |
| Motor power (W) | 250 | 3500 | 13,000 |
| Driving range (km) | <120 | 50–110 | 100 (ECE-15) |
| Normal charging time (h) | 3.5 | 5 | 3.5 |
| Energy consumption (Wh/km) | 3.3 | 17.5–38.4 | 61 |
| Vin (V) | Vout (V) | Vload (V) | Pout (W) | f0 (kHz) | ηmax (%) | MOSFETs & Diodes |
| 48 | 20–60 | 24/36/48 | 200 | 90–110 | 89.2 | IPP030N10N5 BYW29-200 |
| k | L1 (μH) | L2 (μH) | C1 (nF) | C1 (nF) | R1 (Ω) | R1 (Ω) |
| 0.28 | 67.7 | 46.3 | 35.9 | 52.3 | 0.11 | 0.16 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chandra Mouli, G.R.; Van Duijsen, P.; Grazian, F.; Jamodkar, A.; Bauer, P.; Isabella, O. Sustainable E-Bike Charging Station That Enables AC, DC and Wireless Charging from Solar Energy. Energies 2020, 13, 3549. https://doi.org/10.3390/en13143549
Chandra Mouli GR, Van Duijsen P, Grazian F, Jamodkar A, Bauer P, Isabella O. Sustainable E-Bike Charging Station That Enables AC, DC and Wireless Charging from Solar Energy. Energies. 2020; 13(14):3549. https://doi.org/10.3390/en13143549
Chicago/Turabian StyleChandra Mouli, Gautham Ram, Peter Van Duijsen, Francesca Grazian, Ajay Jamodkar, Pavol Bauer, and Olindo Isabella. 2020. "Sustainable E-Bike Charging Station That Enables AC, DC and Wireless Charging from Solar Energy" Energies 13, no. 14: 3549. https://doi.org/10.3390/en13143549