1. Introduction
An Equilibrium problem (EP) was originally started in the unifying feature by Blum and Oettli [
1] in 1994 and provided a detailed investigation of their theoretical properties. This study contributes significantly to the advancement of applied and pure science. This problem is primarily related to Ky Fan Inequity due to his early contributions to this field [
2]. It has been established that the equilibrium problem theory has set up an unique approach to investigate an immense range of topics that have appeared in social and physical science. For instance, it might involve physical or mechanical structures, chemical processes [
3], the distribution of traffic over computer, and telecommunication networks or public roads [
4,
5,
6,
7]. In economics, it often refers to production competition [
8] or the dynamics of offer and demand [
9], exploiting the mathematical model of non-cooperative games and the analogous equilibrium concept by Nash [
10,
11]. The problem of equilibrium, as a particular case, includes many mathematical problems as a particular case, such as the variational inequality problems (VIP), problems of minimization, the fixed point problems, Nash equilibrium of non-cooperative games, complementarity problems, and saddle point problem (see e.g., [
1,
12]).
On the other hand, iterative methods are efficient techniques for determining the approximate solution of an equilibrium problem. In that case, two major approaches that are well-known i.e., the proximal point method [
13] and auxiliary problem principle [
14]. The proximal point method strategy was initially developed by Martinet [
15] for the monotone variational inequality problems and later Rockafellar [
16] extends this approach for monotone operators. Moudafi [
13] proposed the proximal point method for monotone equilibrium problems. Konnov [
17] also suggests a different interpretation of the proximal point method with weaker assumptions for equilibrium problems.
In addition, inertial-type methods are additionally significant, depending on the heavy-ball methods of the second-order time dynamic system. Polyak began by considering inertial extrapolation as an acceleration procedure to deal with the problem of smooth convex minimization. Inertial-type algorithms are two-step iterative schemes, and the next iteration is determined by using the previous two iterations and it can be viewed as an accelerating step of the iterative sequence. A large number of methods are the earliest, being set up for solving the problem (EP) in finite and infinite-dimensional spaces, such as the proximal point-like methods [
13,
18], the extragradient methods [
19,
20,
21,
22,
23], the subgradient extragradient methods [
24,
25,
26], the inertia methods [
27,
28,
29,
30,
31,
32] and others in [
33,
34].
In this work, our focus is on the proximal point method, in particular projection methods, which are well established and technically easy to implement due to their convenient numerical computation. This manuscript aims to suggest two modifications of the results that appeared in [
21,
35,
36] by applying the inertial scheme that is useful for speeding up the iteration process. The first result includes the two-step inertial Popov’s extragradient method for determining a numerical solution to the pseudomonotone equilibrium problems and the weak convergence of the suggested method is achieved based on the standard assumptions. We also propose an alternative inertial-type method, the second variant of the first method. The second method does not need any information regarding the Lipschitz-type and strongly pseudomonotone constants of a bifunction. A practical explanation for the second method is that it uses a diminishing and non-summable sequence of non-negative real numbers, which are useful in achieving the strong convergence.
This manuscript is arranged, as follows: in
Section 2, we provide some essential definitions and useful results.
Section 3 and
Section 4 include all of our main methods and corresponding convergence results.
Section 5 provides the methods for variational inequality problems.
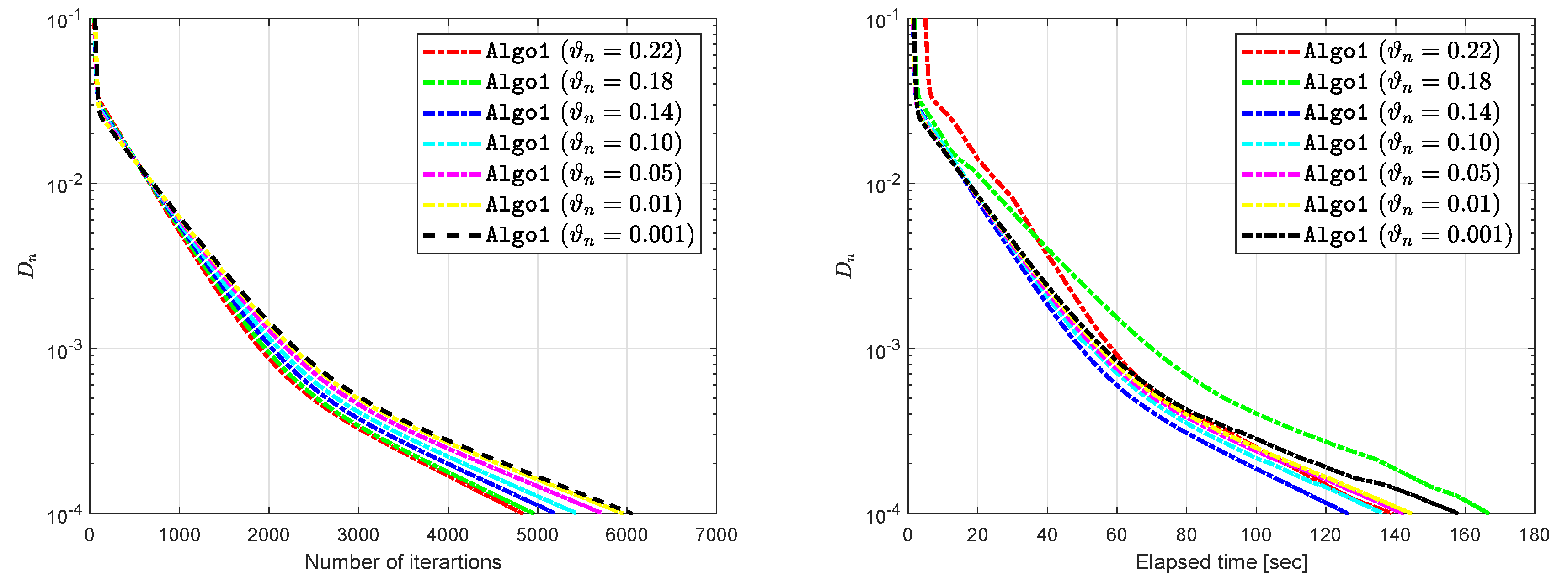
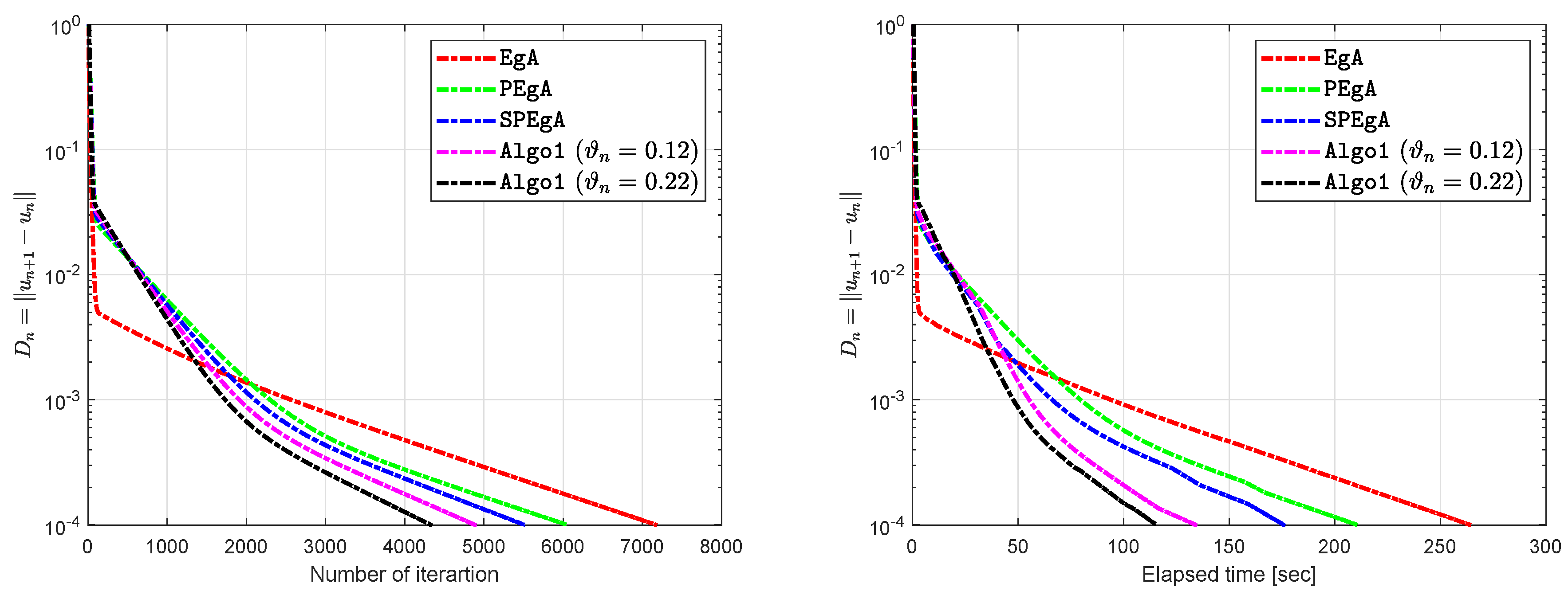
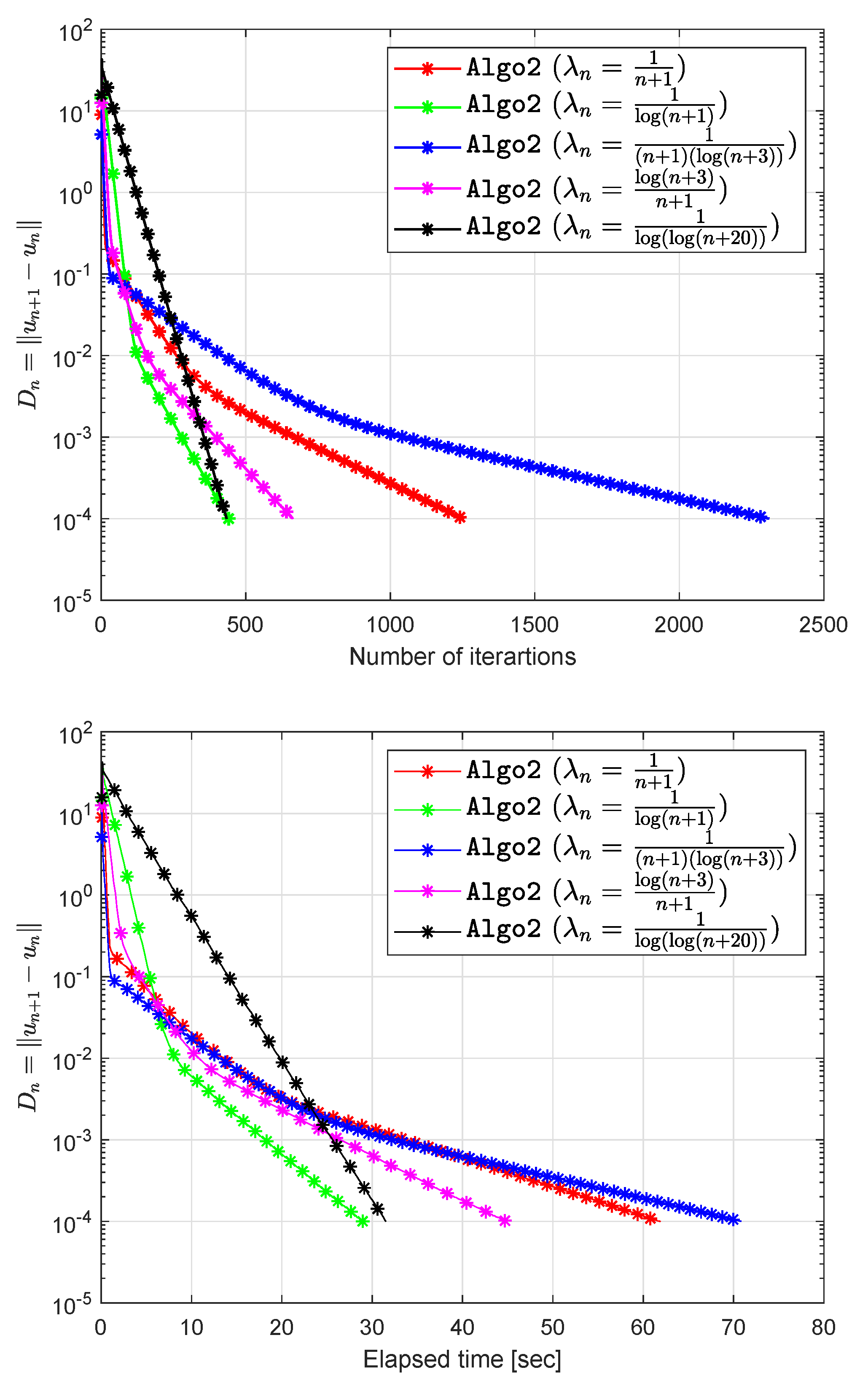
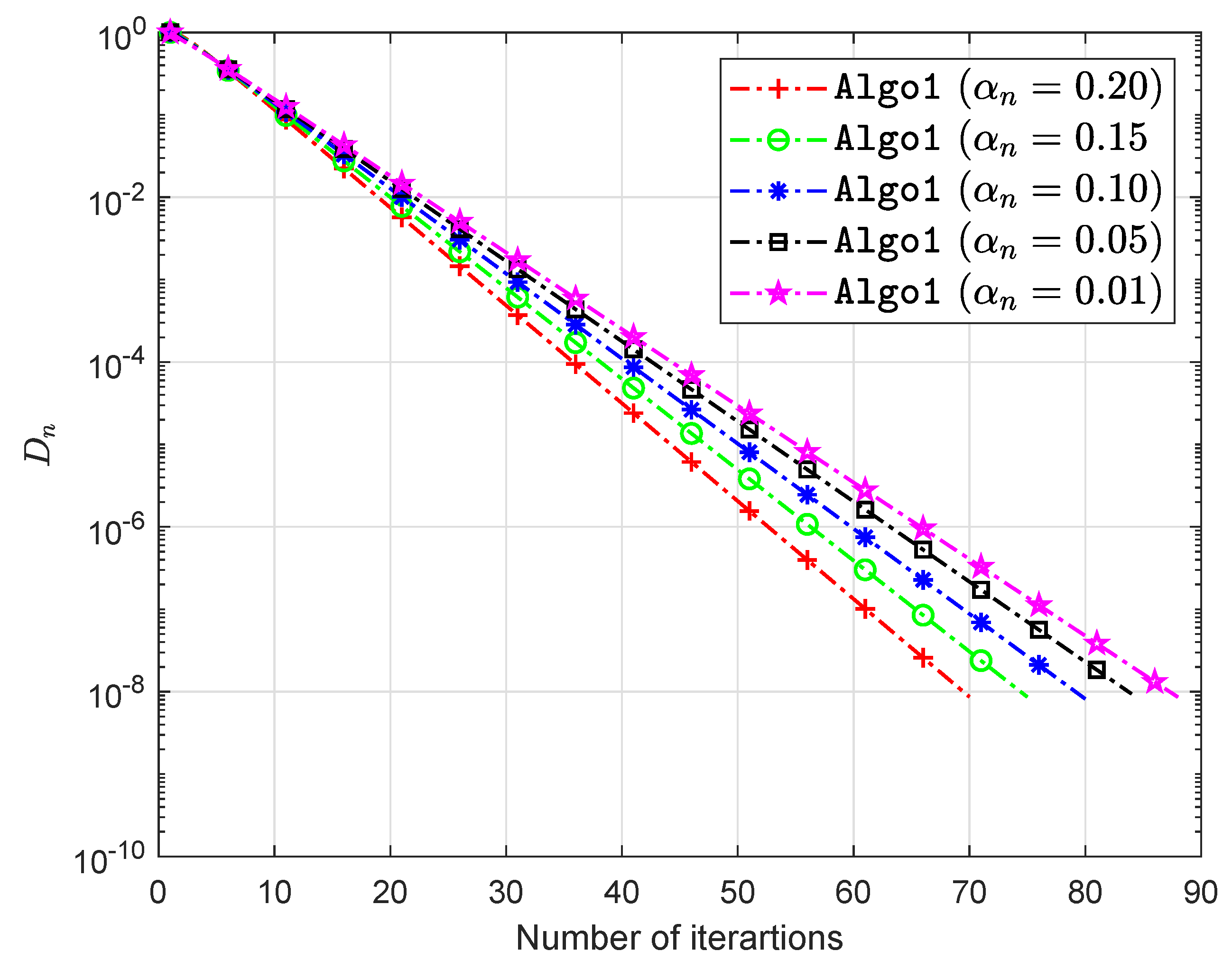
Section 6 sets out the numerical tests to show the numerical efficiency of the proposed methods for the test problems based on the Nash–Cournot equilibrium model compare to other existing methods.
2. Background
Let K be a non-empty, convex, and closed subset of the Hilbert space . Let be an operator and is the solution set of a variational inequality problem relative to the operator H upon the set K. Likewise, denotes the solution set of an equilibrium problem on the set K and is any arbitrary element of the solution set or .
Definition 1. [
1]
Let be a bifunction with , for each . The equilibrium problem for f upon K is defined, as follows: Definition 2. [
37]
The metric projection of on a closed and convex subset K of is determined, as follows: Next, we take the concept of monotonicity of a bifunction into account (see [
1,
38] for details).
Definition 3. Let on K for is
- (1)
- (2)
- (3)
strongly pseudomonotone if - (4)
- (5)
satisfying the Lipschitz-type condition on K if there exist constants such that holds.
This section ends with a few essential lemmas that are useful for examining convergence.
Lemma 1. [
39]
Assume that K is non-empty, convex, and closed subset of Hilbert space and is a convex, subdifferentiable, and lower semi-continuous function on . Furthermore, is a minimizer of g if and only if where and denotes the subdifferential of g at and normal cone of K at , respectively. Lemma 2. [
40]
Let be two sequences and with , then . Lemma 3. [
41]
For and then the following relation is true: Lemma 4. [
42]
Assume that , and are sequences in , such thatand also with , such that for all . Subsequently, the following relations are hold.- (i)
with
- (ii)
Lemma 5. [
43]
Let be a sequence in and such that the following relations are true:- (i)
For each , exists;
- (ii)
Every sequentially weak cluster point of belongs to K;
Subsequently, weakly converges to a point in .
A
normal cone of K at
is defined as:
Let
be a convex function with
subdifferential of g at
is defined as:
3. Inertial Popov’s Two-Step Subgradient Extragradient Algorithm for Pseudomonotone EP
We present our first method to solve the pseudomonotone equilibrium problems involving the Lipschitz-type condition of a bifunction. It uses an inertial term to boost up the iterative sequence, so we referred it as an “Inertial Popov’s Two-step Subgradient Extragradient Algorithm” for a class pseudomonotone equilibrium problems. The detailed algorithm is given below.
| Algorithm 1 (Two-step Subgradient Extragradient Algorithm for Pseudomonotone EP) |
Initialization: Choose , and . Set
where and . Iterative steps: Given , , for and construct a half space
where . Step 1: Compute
where . Step 2: Compute
where . Step 3: If and , then STOP. Otherwise, set and go back to Step 1.
|
Assumption 1. Assume that satisfy the following conditions:
- (A1)
for all and f is pseudomonotone on K;
- (A2)
f satisfy the Lipschitz-type condition on through two positive constants and ;
- (A3)
for all and satisfy ;
- (A4)
is convex and subdifferentiable on for each
Lemma 6. We have the following crucial inequality that results from the Algorithm 1. Proof. By the value
through Lemma 1, we have
For
, there exists
, such that
Because
then
,
It implies that
Due to
and by definition of subdifferentiable, we obtain
From expressions (
1) and (
2), we have the required result. □
Lemma 7. We also have the following inequality from Algorithm 1. Proof. The proof is the same as that of Lemma 6. □
Lemma 8. We have the following inequality from Algorithm 1. Proof. Because
then the definition of
implies that
From
and due to subdifferential definition, we have
Set
in the above expression
From expression (
3) and (
4), we obtain the desired result. □
Now, we are proving the validity of the stopping criterion for Algorithm 1.
Lemma 9. If and in Algorithm 1, then .
Proof. By substituting
in Lemma 6, we have
Because
and
,
, then from Lemma 8, we have
The expression (
5) and (
6) implies that
. □
Remark 1. Two more conditions for stopping criterion are and for Algorithm 1. The validity of these stopping criterion can be shown easily by Lemma 6 and Lemma 7, respectively.
Lemma 10. Let satisfying the Assumption 1. Assume that is nonempty. Afterwards, for each , we have Proof. Substituting
into Lemma 6, we obtain
Since
then
Thus, from (A1) the above expression becomes
Because of the Lipschitz-type condition, we have
The expression (
9) and (
10) implies that
From expression (
11) and Lemma 8, we obtain
We have the following facts:
We also have the following inequality
From the above two facts and last inequality with (
12) provides the required result. □
Now, we are in a position to provide our first convergence result of this work.
Theorem 1. Assume that , and sequences in generated by Algorithm 1, where the sequence is non-decreasing and λ is a positive real number, such that Subsequently, the sequences , and are converges weakly to an element of .
Proof. By the definition of
in Algorithm 1, we have
By the definition of
in Algorithm 1, we also have
Combining the expression (
13)–(
15), we obtain
By substituting
and due to the inequality
From this discussion, the expression (
18) turns into following:
where
By the value
, we have
Combining the expression (
19) and (21) implies that
where
and
Further, we take
It follows from (22) that
The expression (
23) and (
24) with some
, implies that
The above relation (
25) implies that the sequence
is non-increasing. From
, we have
Additionally, from definition
, we have
Combining the expression (
26) and (
27), we obtain
It continues to follow from (
25) and (
28), such that
letting
in (
29) implies that
From the relation (20) and (30), we obtain
Next, the expression (
28) implies that
From the relation (18) we have
Set
and using (
33) for
, gives that
letting
in (
34) implies that
and
The following relation can easily be derived:
By the definition of
and using Cauchy inequality, we have
Now, summing up the expression (38) for
, we obtain
The above expression with (
30) and (
35) implies that
It follows from the relation (
16), we obtain
above expression with (30), (40), (37) and Lemma 4 implies that limit of
and
exists for every
, means that the sequences
,
and
are bounded. Next, we need to show that each weak sequential limit point of the sequence
belongs to
. Let
z be arbitrary weak cluster point of the sequence
, and then there exists a weak convergent subsequence
of
converges to
, this also implies that
also converge weakly to
Now our aim to prove that
By Lemma 6, the bifunction Lipschitz-type condition and Lemma 8, we have
where
y be an any element in
As a result with (31), (36), (37), and due to the boundedness of the sequence
the above inequality tends to zero. By given
, the assumption (A3) and
, we obtain
Due to , we obtain This implies that z belongs to Thus Lemma 5, ensures that , and weakly converges to as
Remark 2. For in Algorithm 1 gives the results as in [35,36]. 4. Inertial Popov’s Two-Step Subgradient Extragradient Algorithm for Strongly Pseudomonotone EP
The second algorithm is also an inertial algorithm that is able to solve the strongly pseudomonotone equilibrium problem. However, the advantage of this algorithm is that there is no need for prior information regarding the strongly pseudomonotone constant
and Lipschitz constants
. Let
be a non-increasing sequence, so that the following conditions are satisfied:
Assumption 2. Let a bifunction satisfies the following conditions:
- (B1)
and f is strongly pseudomontone on K;
- (B2)
f meet the Lipschitz-type condition on with two positive constants and ;
- (B3)
is sub-differentiable and convex on for all
Lemma 11. Assume that satisfies the conditions (B1)–(B3)
. Let the solution set is nonempty. For each , we have Now, we are in a position to provide our second convergence result of this work.
Theorem 2. Assume that satisfies the conditions (B1)–(B3). Let , and are sequences in generated by Algorithm 2 and is non-decreasing sequence with . Subsequently, , and strongly converge to an element in .
| Algorithm 2 (Two-step Subgradient Extragradient Algorithm for Strongly Pseudomonotone EP) |
Initialization: Choose , and a sequence satisfying (43). Set
where and . Iterative steps: Assume that , , and are known for and
where . Step 1: Compute
where . Step 2: Compute
where . Step 3: If and , then STOP. Otherwise set and go to Step 1.
|
Proof. The proof is the identical as the proof of Theorem 1, but there are still few changes. We provide the proof for the readable purpose. By Lemma 11 and adding
in both sides, we have
By using the definition of
in Algorithm 2, we have
By using the definition
in Algorithm 2, we also have
Combining the expression (
44)–(
46), we obtain
Next, we let
and
Due to the above substituting the expression (48) turns into the following:
By the definition
, we have
Combining the expression (49) and (
50), we obtain
where
and
In addition, we also take
It follows from (
51) that
Since
, then there exists a finite number
such that
Similarly, it follows from (
24) and expression (
52) implies that
The above implies that the sequence
is non-increasing for
From the value of
, we have
From the definition of
with the expression (
54), we obtain
It is follows from (
53) and (
55) that
letting
in the expression (
56), we obtain
From the expression (20) and (
57), we obtain
The expression (
55) implies that
It follows from (48) for all
, such that
Consider the expression (
60) for
Summing them up, we obtain
By letting
in the expression (
61) implies that
and
We can easily derive the following relationship:
By using the value
, we obtain
Now, summing up equation (
65) for
, we obtain
The above expression with (
57) and (
62) implies that
Furthermore, the expression (
47) gives that
The above expression through (
57), (
67), and Lemma 4 implies that
The expression (
64) with (
69), we obtain
Now, we are showing that the sequence
converges strongly to
Due to the condition on
for all
, we can easily observe the following inequality:
It follows from Lemma 11, such that
From the expression (45) and (71), we obtain
It follows from expression (
72) that
for
It implies that
By the Lemma 2 and (74) implies that
Finally, expression (69) and (75) provide that This completes the proof. □
5. Application to Variational Inequality Problems
For considering Algorithm 1 and Theorem 1, we can able to write the next result for solving variational inequality problems that involve pseudomonotone and Lipschitz continuous operator.
Corollary 1. Assume that be a Lipschitz continuous with the constant L and pseudomonotone operator. Let , and be sequences generated, as follows:
- (i)
Choose , and Compute - (ii)
Given , and for each and construct the half-space first as - (iii)
where , such thatwith . Subsequently, sequence , and converge weakly to . From the consideration on Algorithm 2 and Theorem 2, we state the following result for the class of variational inequality problems involving strongly pseudomonotone and Lipschitz continuous operator.
Corollary 2. Assume that is a Lipschitz continuous and strongly pseudomonotone operator with the constant . Let , and are the sequences generated as follows:
- (i)
Choose , and a sequence satisfying (43). Compute - (ii)
Given , and create a half space for each such that - (iii)
where , with . The sequence , and converge strongly to .

 ,
, 











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}