Improved Predictive Control in Multi-Modular Matrix Converter for Six-Phase Generation Systems

 ,
, 
 ,
, 
 and
and
Abstract
:1. Introduction
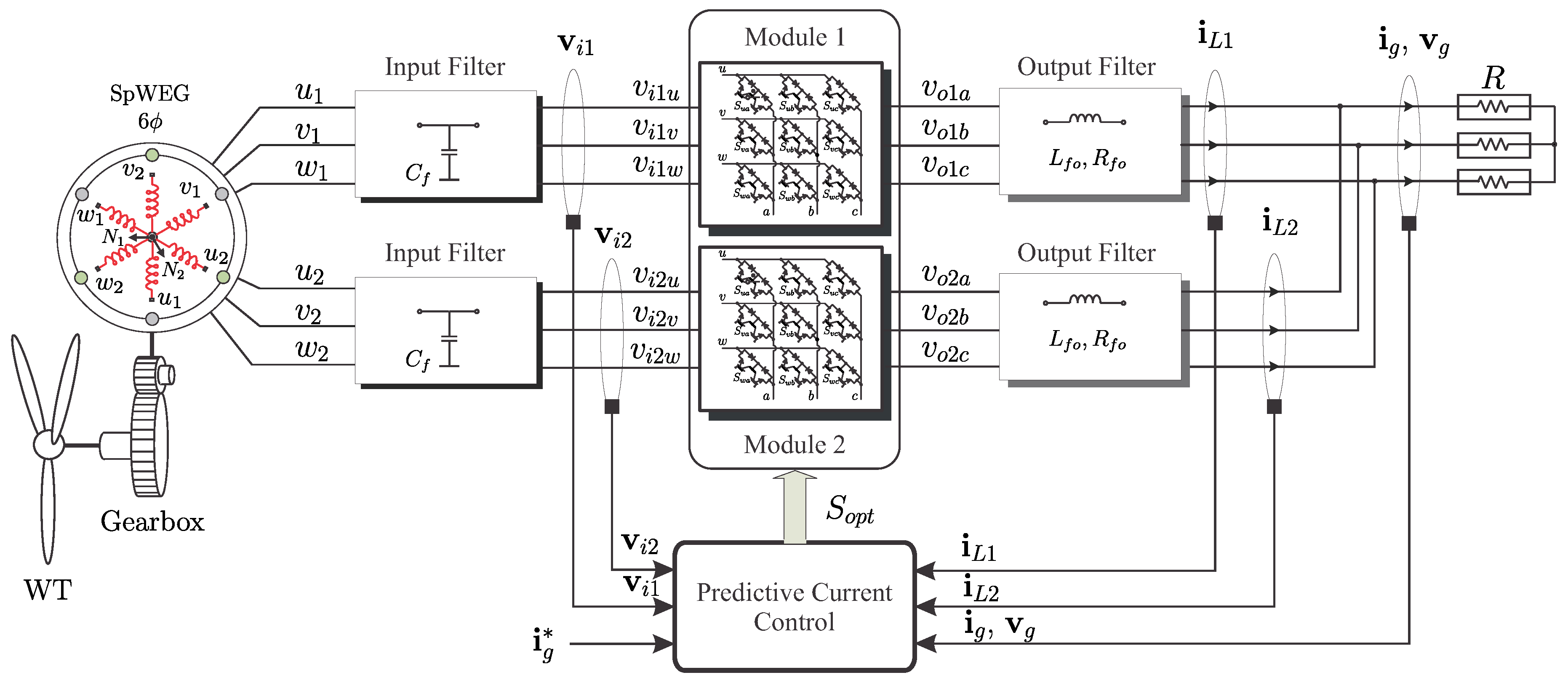
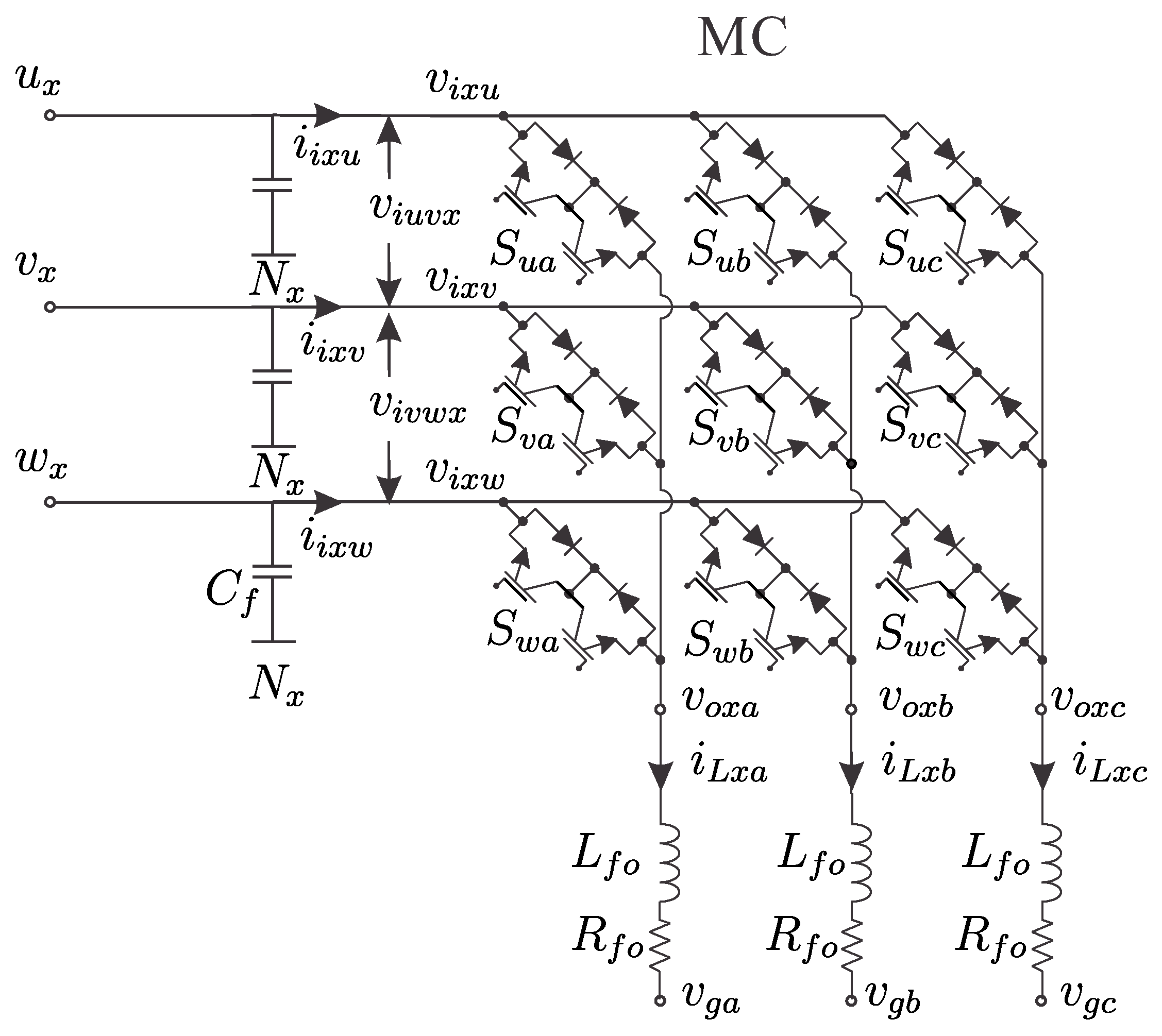
2. Model of the Power Conversion System
3. Control Strategy
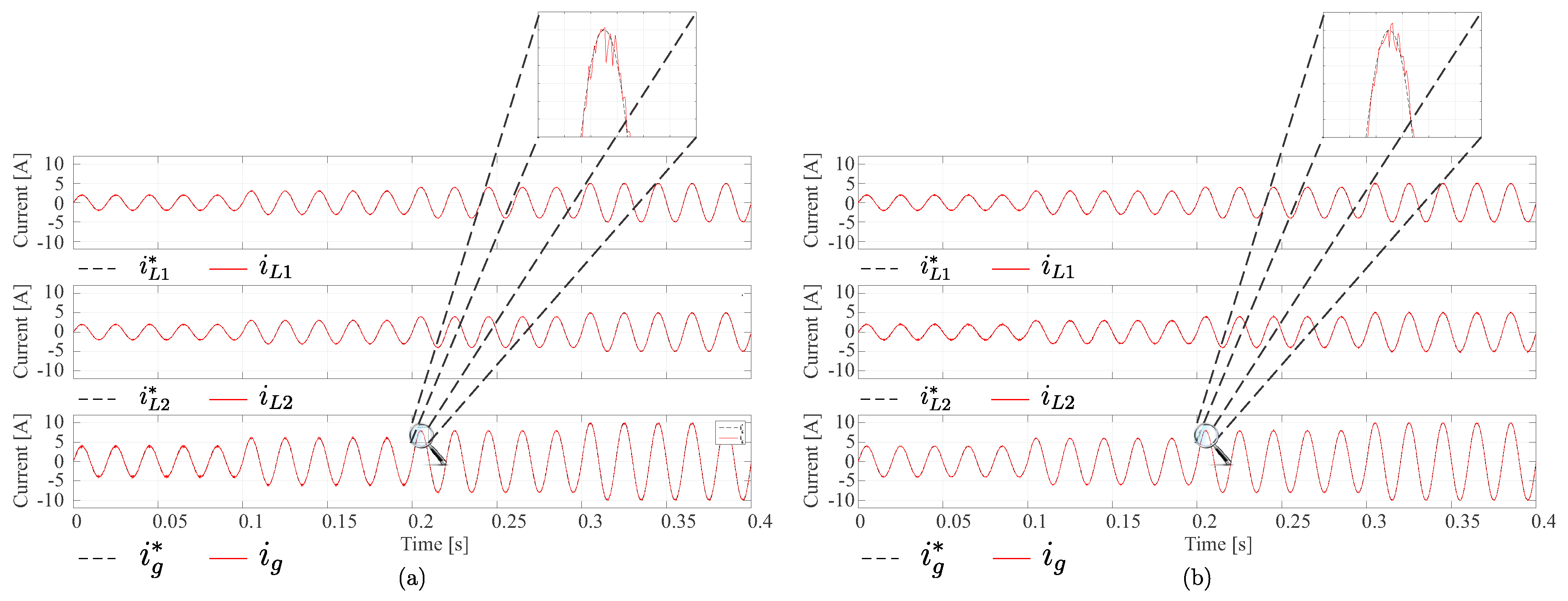
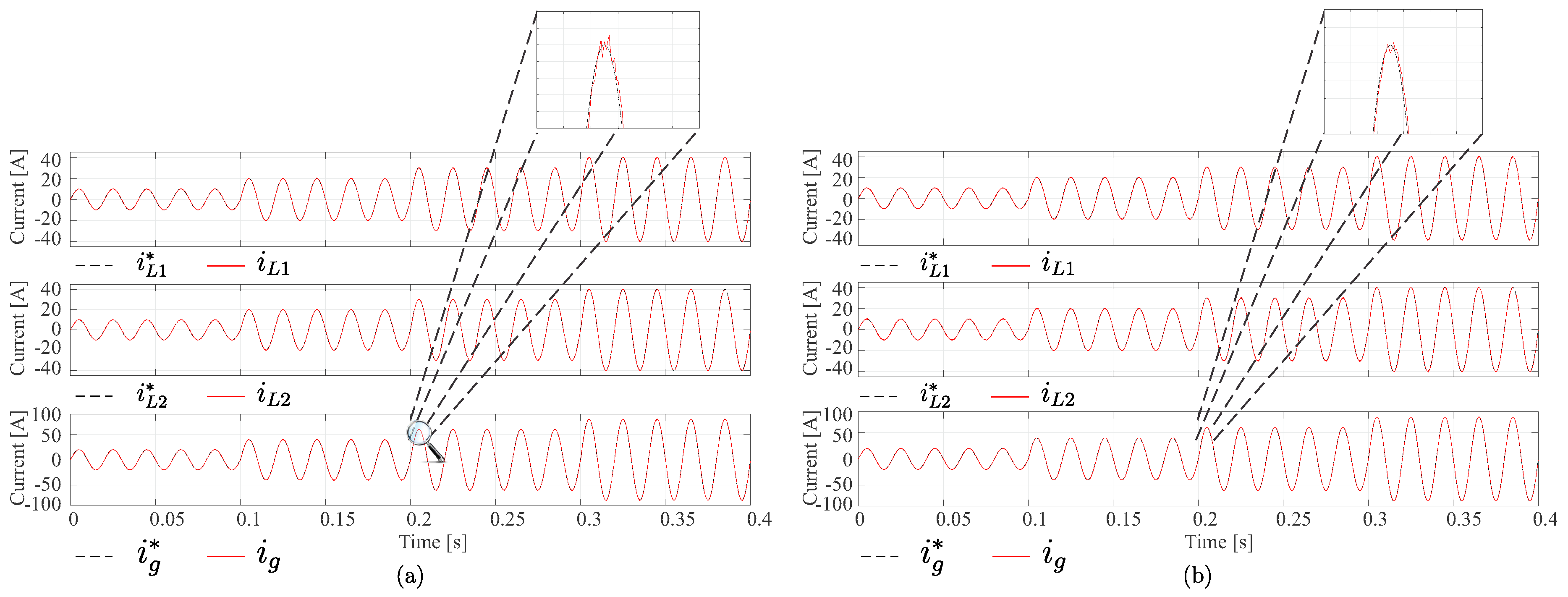
4. Simulation and Analysis of the Technique
5. Experimental Validation
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
Appendix A. Predictive Current Control Algorithms for the Multi-Modular Matrix Converter Topology
Appendix A.1. Independent Predictive Current Control
| Algorithm 1 Independent predictive current control |
|
1. Initialize , , 2. Read measured , , , , 3. Compute predicted and using and in Equation (7) 4. for j=1 to 27 5. Compute and using (Equation (2)) 6. Compute the prediction of and using and calculation in Equation (7) 7. Compute the cost functions and (Equation (9)) 8. if then 9. , 10. end if 11. if then 12. , 13. end if 14. end for 15. Apply the optimum vector |
Appendix A.2. Coupled Predictive Current Control
| Algorithm 2 Coupled predictive current control |
|
1. Initialize , , 2. Read measured , , , , 3. Compute predicted and using and in Equation (7) 4. for j=1 to 27 5. Compute using (Equation (2)) 6. Compute the prediction of using calculation in Equation (7) 7. Compute the cost function (Equation (11)) 8. if then 9. 10. end if 11. end for 12. for j=1 to 27 13. Compute using (Equation (2)) 14. Compute the prediction of using calculation in Equation (7) 15. Compute the cost function (Equation (11)) 16. if then 17. 18. end if 19. end for 20. Apply the optimum vector |
References
- Smil, V. Distributed Generation and Megacities: Are Renewables the Answer? IEEE Power Energy Mag. 2019, 17, 37–41. [Google Scholar] [CrossRef]
- Ahmed, S.D.; Al-Ismail, F.S.M.; Shafiullah, M.; Al-Sulaiman, F.A.; El-Amin, I.M. Grid Integration Challenges of Wind Energy: A Review. IEEE Access 2020, 8, 10857–10878. [Google Scholar] [CrossRef]
- Toledo, S.; Rivera, M.; Elizondo, J.L. Overview of wind energy conversion systems development, technologies and power electronics research trends. In Proceedings of the 2016 IEEE International Conference on Automatica (ICA-ACCA), Curico, Chile, 19–21 October 2016; pp. 1–6. [Google Scholar] [CrossRef]
- Duran, M.J.; Barrero, F. Recent Advances in the Design, Modeling, and Control of Multiphase Machines: Part II. IEEE Trans. Ind. Electron. 2016, 63, 459–468. [Google Scholar] [CrossRef]
- Chinmaya, K.; Singh, G.K. Performance evaluation of multiphase induction generator in stand-alone and grid-connected wind energy conversion system. IET Renew. Power Gener. 2018, 12, 823–831. [Google Scholar] [CrossRef]
- Gonzalez, O.; Ayala, M.; Doval-Gandoy, J.; Rodas, J.; Gregor, R.; Rivera, M. Predictive-Fixed Switching Current Control Strategy Applied to Six-Phase Induction Machine. Energies 2019, 12, 2294. [Google Scholar] [CrossRef] [Green Version]
- Liu, Z.; Li, Y.; Zheng, Z. A review of drive techniques for multiphase machines. CES Trans. Electr. Mach. Syst. 2018, 2, 243–251. [Google Scholar] [CrossRef]
- Barrero, F.; Duran, M.J. Recent Advances in the Design, Modeling, and Control of Multiphase Machines: Part I. IEEE Trans. Ind. Electron. 2016, 63, 449–458. [Google Scholar] [CrossRef]
- Priya, M.; Ponnambalam, P.; Muralikumar, K. Modular-multilevel converter topologies and applications—A review. IET Power Electron. 2019, 12, 170–183. [Google Scholar] [CrossRef]
- Salgado-Herrera, N.; Campos-Gaona, D.; Anaya-Lara, O.; Medina-Rios, A.; Tapia-Sánchez, R.; Rodríguez-Rodríguez, J. THD reduction in wind energy system using type-4 Wind Turbine/PMSG applying the active front-end converter parallel operation. Energies 2018, 11, 2458. [Google Scholar] [CrossRef] [Green Version]
- Bakas, P.; Harnefors, L.; Norrga, S.; Nami, A.; Ilves, K.; Dijkhuizen, F.; Nee, H. A Review of Hybrid Topologies Combining Line-Commutated and Cascaded Full-Bridge Converters. IEEE Trans. Power Electron. 2017, 32, 7435–7448. [Google Scholar] [CrossRef]
- Feng, Z.; Zhang, X.; Wang, J.; Yu, S. A High-Efficiency Three-Level ANPC Inverter Based on Hybrid SiC and Si Devices. Energies 2020, 13, 1159. [Google Scholar] [CrossRef] [Green Version]
- Li, J.; Konstantinou, G.; Wickramasinghe, H.R.; Pou, J. Operation and Control Methods of Modular Multilevel Converters in Unbalanced AC Grids: A Review. IEEE J. Emerg. Sel. Top. Power Electron. 2019, 7, 1258–1271. [Google Scholar] [CrossRef]
- Zhang, J.; Li, L.; Dorrell, D.G. Control and applications of direct matrix converters: A review. Chin. J. Electr. Eng. 2018, 4, 18–27. [Google Scholar] [CrossRef]
- Riveros, J.A.; Prieto, J.; Rivera, M.; Toledo, S.; Gregor, R. A generalised multifrequency PWM strategy for dual three-phase voltage source converters. Energies 2019, 12, 1398. [Google Scholar] [CrossRef] [Green Version]
- Dragicevic, T.; Zheng, C.; Rodriguez, J.; Blaabjerg, F. Robust Quasi-Predictive Control of LCL-Filtered Grid Converters. IEEE Trans. Power Electron. 2019. [Google Scholar] [CrossRef]
- Rivera, M.; Toledo, S.; Tarisciotti, L.; Wheeler, P.W.; Dan, H. Predictive Control Strategies Operating at Fixed Switching Frequency for Input Filter Resonance Mitigation in an Indirect Matrix Converter. IEEE Lat. Am. Trans. 2018, 16, 2370–2376. [Google Scholar] [CrossRef]
- Li, H.; Ren, K.; Li, S.; Dong, H. Adaptive Multi-Model Switching Predictive Active Power Control Scheme for Wind Generator System. Energies 2020, 13, 1329. [Google Scholar] [CrossRef] [Green Version]
- Gontijo, G.F.; Tricarico, T.C.; França, B.W.; da Silva, L.F.; van Emmerik, E.L.; Aredes, M. Robust Model Predictive Rotor Current Control of a DFIG Connected to a Distorted and Unbalanced Grid Driven by a Direct Matrix Converter. IEEE Trans. Sustain. Energy 2019, 10, 1380–1392. [Google Scholar] [CrossRef]
- Vijayagopal, M.; Silva, C.; Empringham, L.; de Lillo, L. Direct Predictive Current-Error Vector Control for a Direct Matrix Converter. IEEE Trans. Power Electron. 2019, 34, 1925–1935. [Google Scholar] [CrossRef]
- Zhang, J.; Li, L.; Dorrell, D.G.; Norambuena, M.; Rodriguez, J. Predictive Voltage Control of Direct Matrix Converters With Improved Output Voltage for Renewable Distributed Generation. IEEE J. Emerg. Sel. Top. Power Electron. 2019, 7, 296–308. [Google Scholar] [CrossRef]
- Formentini, A.; Trentin, A.; Marchesoni, M.; Zanchetta, P.; Wheeler, P. Speed Finite Control Set Model Predictive Control of a PMSM Fed by Matrix Converter. IEEE Trans. Ind. Electron. 2015, 62, 6786–6796. [Google Scholar] [CrossRef]
- Siami, M.; Amiri, M.; Savadkoohi, H.K.; Rezavandi, R.; Valipour, S. Simplified Predictive Torque Control for a PMSM Drive Fed by a Matrix Converter With Imposed Input Current. IEEE J. Emerg. Sel. Top. Power Electron. 2018, 6, 1641–1649. [Google Scholar] [CrossRef]
- Lei, J.; Feng, S.; Wheeler, P.; Zhou, B.; Zhao, J. Steady-State Error Suppression and Simplified Implementation of Direct Source Current Control for Matrix Converter With Model Predictive Control. IEEE Trans. Power Electron. 2020, 35, 3183–3194. [Google Scholar] [CrossRef]
- Toledo, S.; Rivera, M.; Gregor, R.; Rodas, J.; Comparatore, L. Predictive current control with reactive power minimization in six-phase wind energy generator using multi-modular direct matrix converter. In Proceedings of the 2016 IEEE ANDESCON, Arequipa, Peru, 19–21 October 2016; pp. 1–4. [Google Scholar] [CrossRef]
- Toledo, S.; Gregor, R.; Rivera, M.; Rodas, J.; Gregor, D.; Caballero, D.; Gavilán, F.; Maqueda, E. Multi-modular matrix converter topology applied to distributed generation systems. In Proceedings of the 8th IET International Conference on Power Electronics, Machines and Drives (PEMD 2016), Glasgow, UK, 19–21 April 2016; pp. 1–6. [Google Scholar] [CrossRef]
- Khosravi, M.; Amirbande, M.; Khaburi, D.A.; Rivera, M.; Riveros, J.; Rodriguez, J.; Vahedi, A.; Wheeler, P. Review of model predictive control strategies for matrix converters. IET Power Electron. 2019, 12, 3021–3032. [Google Scholar] [CrossRef]
- Gontijo, G.; Soares, M.; Tricarico, T.; Dias, R.; Aredes, M.; Guerrero, J. Direct Matrix Converter Topologies with Model Predictive Current Control Applied as Power Interfaces in AC, DC, and Hybrid Microgrids in Islanded and Grid-Connected Modes. Energies 2019, 12, 3302. [Google Scholar] [CrossRef] [Green Version]
- Gonçalves, P.; Cruz, S.; Mendes, A. Finite Control Set Model Predictive Control of Six-Phase Asymmetrical Machines—An Overview. Energies 2019, 12, 4693. [Google Scholar] [CrossRef] [Green Version]
- O’Rourke, C.J.; Qasim, M.M.; Overlin, M.R.; Kirtley, J.L. A Geometric Interpretation of Reference Frames and Transformations: Dq0, Clarke, and Park. IEEE Trans. Energy Convers. 2019, 34, 2070–2083. [Google Scholar] [CrossRef] [Green Version]
- IEEE. IEEE Recommended Practice and Requirements for Harmonic Control in Electric Power Systems. In IEEE Std 519-2014 (Revision of IEEE Std 519-1992); IEEE: Piscataway, NJ, USA, 2014; pp. 1–29. [Google Scholar] [CrossRef]
- Maqueda, E.; Rodas, J.; Toledo, S.; Gregor, R.; Caballero, D.; Gavilan, F.; Rivera, M. Design and implementation of a modular bidirectional switch using SiC-MOSFET for power converter applications. Act. Passiv. Electron. Components 2018, 2018. [Google Scholar] [CrossRef] [Green Version]
- Wheeler, P.W.; Clare, J.; Empringham, L. Enhancement of matrix converter output waveform quality using minimized commutation times. IEEE Trans. Ind. Electron. 2004, 51, 240–244. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Description | Electrical Parameters | ||
|---|---|---|---|
| Symbol | Value | Unit | |
| Generator phase peak voltage | 110-220 | V | |
| Generator frequency | 50 | Hz | |
| Input filter capacitance | 11 | F | |
| Output filter leakage resistance | 0.3 | ||
| Output filter inductance | 10 | mH | |
| Load resistance | R | 5.3-0.1 | |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Toledo, S.; Maqueda, E.; Rivera, M.; Gregor, R.; Wheeler, P.; Romero, C. Improved Predictive Control in Multi-Modular Matrix Converter for Six-Phase Generation Systems. Energies 2020, 13, 2660. https://doi.org/10.3390/en13102660
Toledo S, Maqueda E, Rivera M, Gregor R, Wheeler P, Romero C. Improved Predictive Control in Multi-Modular Matrix Converter for Six-Phase Generation Systems. Energies. 2020; 13(10):2660. https://doi.org/10.3390/en13102660
Chicago/Turabian StyleToledo, Sergio, Edgar Maqueda, Marco Rivera, Raúl Gregor, Pat Wheeler, and Carlos Romero. 2020. "Improved Predictive Control in Multi-Modular Matrix Converter for Six-Phase Generation Systems" Energies 13, no. 10: 2660. https://doi.org/10.3390/en13102660