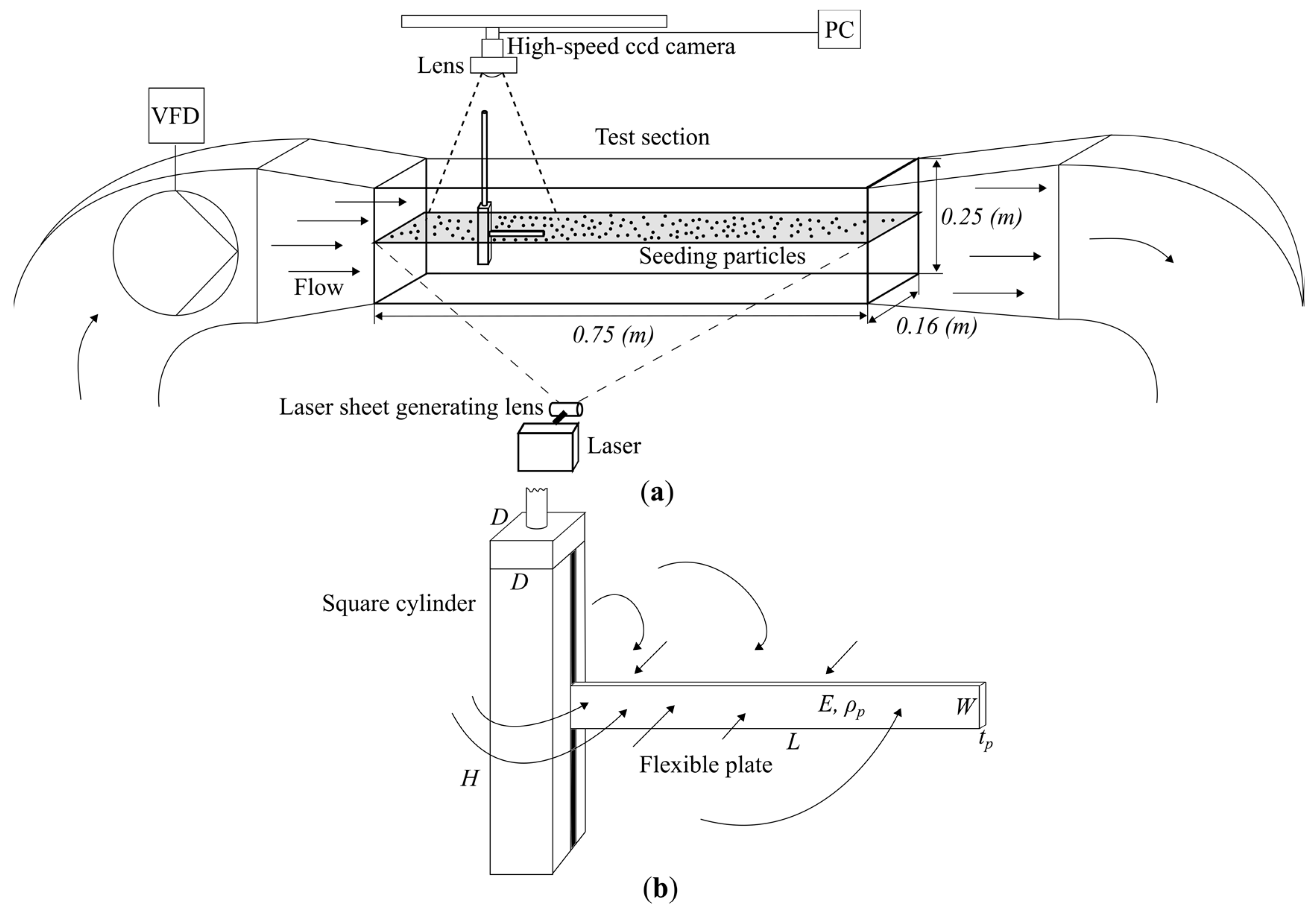
Figure 1.
(a) Water tunnel experiments apparatus. (b) Flexible plate clamped to the square cylinder.
Figure 1.
(a) Water tunnel experiments apparatus. (b) Flexible plate clamped to the square cylinder.
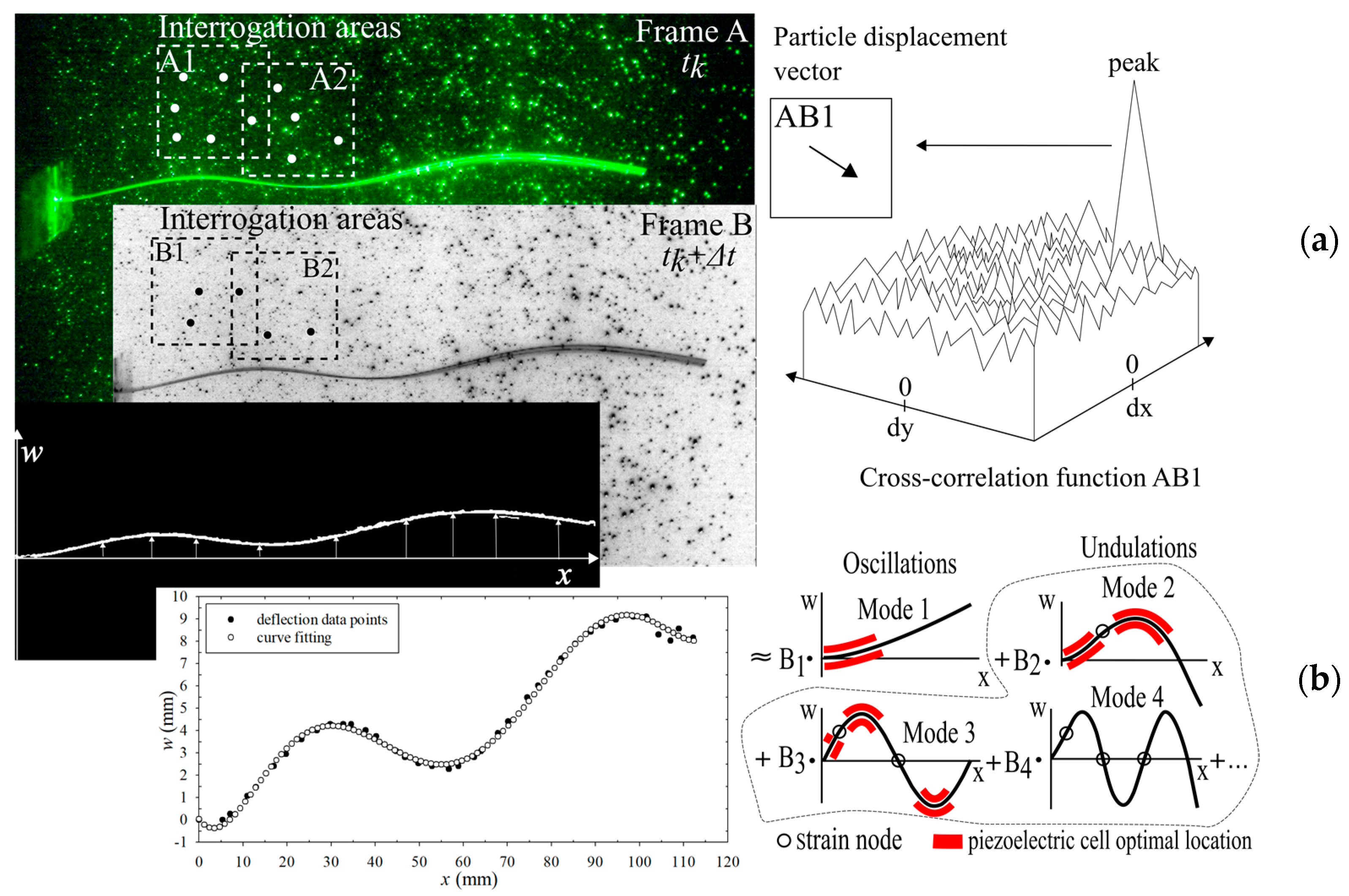
Figure 2.
Experimental procedure: (a) particle image velocimetry principle; (b) shape capture, curve fitting and modal analysis.
Figure 2.
Experimental procedure: (a) particle image velocimetry principle; (b) shape capture, curve fitting and modal analysis.
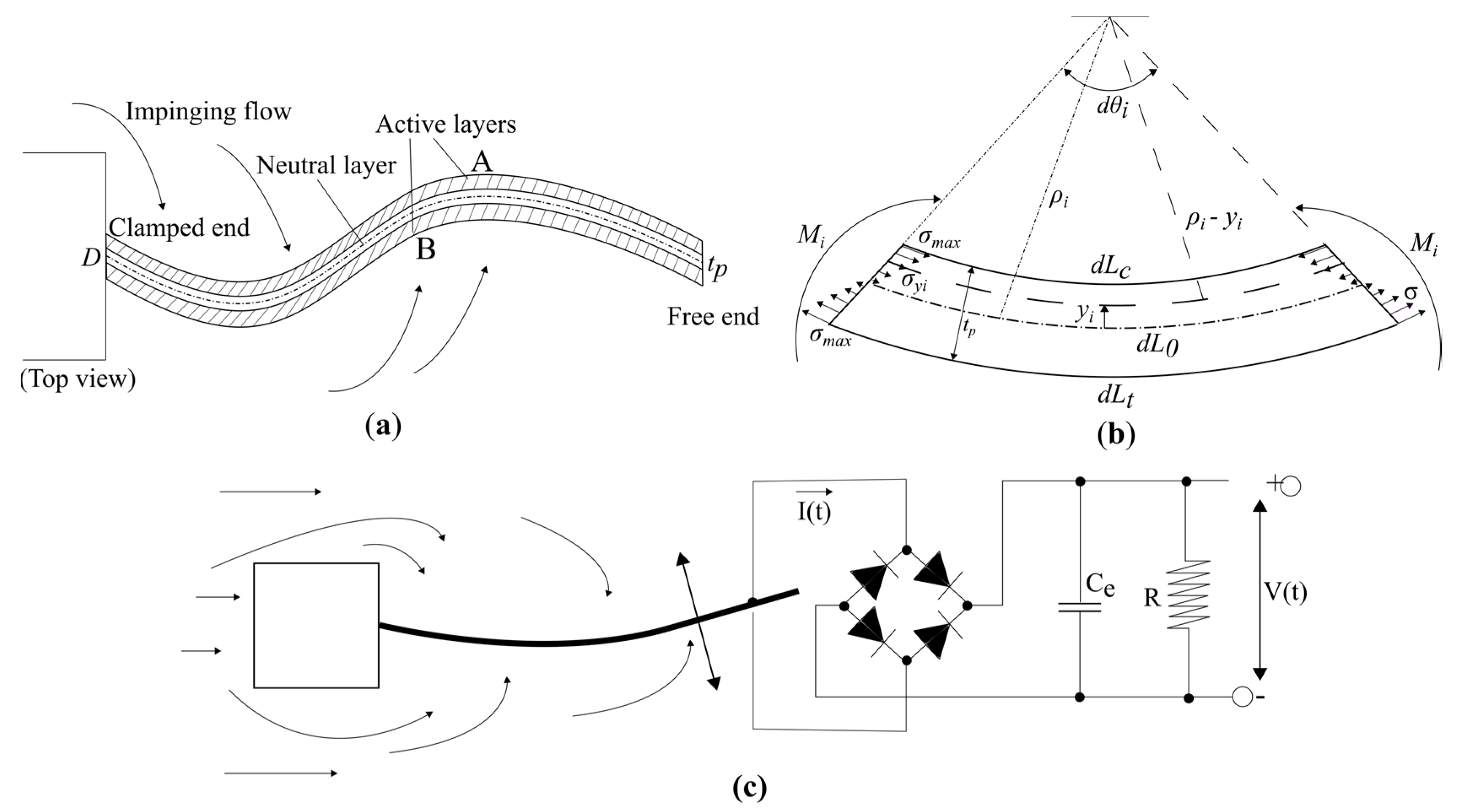
Figure 3.
(a) Undulating plate in wake flow; (b) pure bending of the plate; (c) concept of the undulating piezoelectric energy harvester.
Figure 3.
(a) Undulating plate in wake flow; (b) pure bending of the plate; (c) concept of the undulating piezoelectric energy harvester.
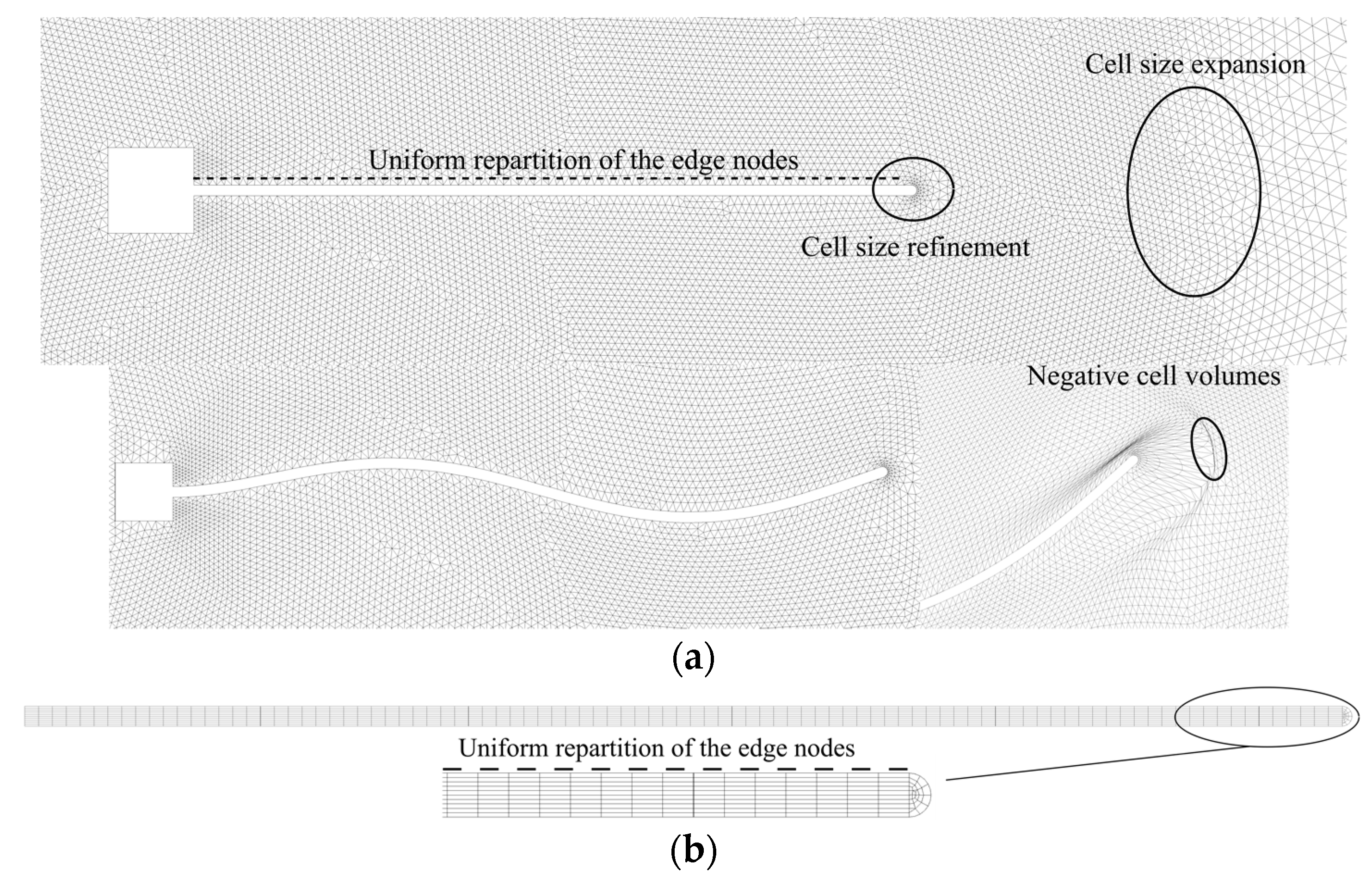
Figure 4.
(a) Fluid mesh; (b) Solid mesh.
Figure 4.
(a) Fluid mesh; (b) Solid mesh.
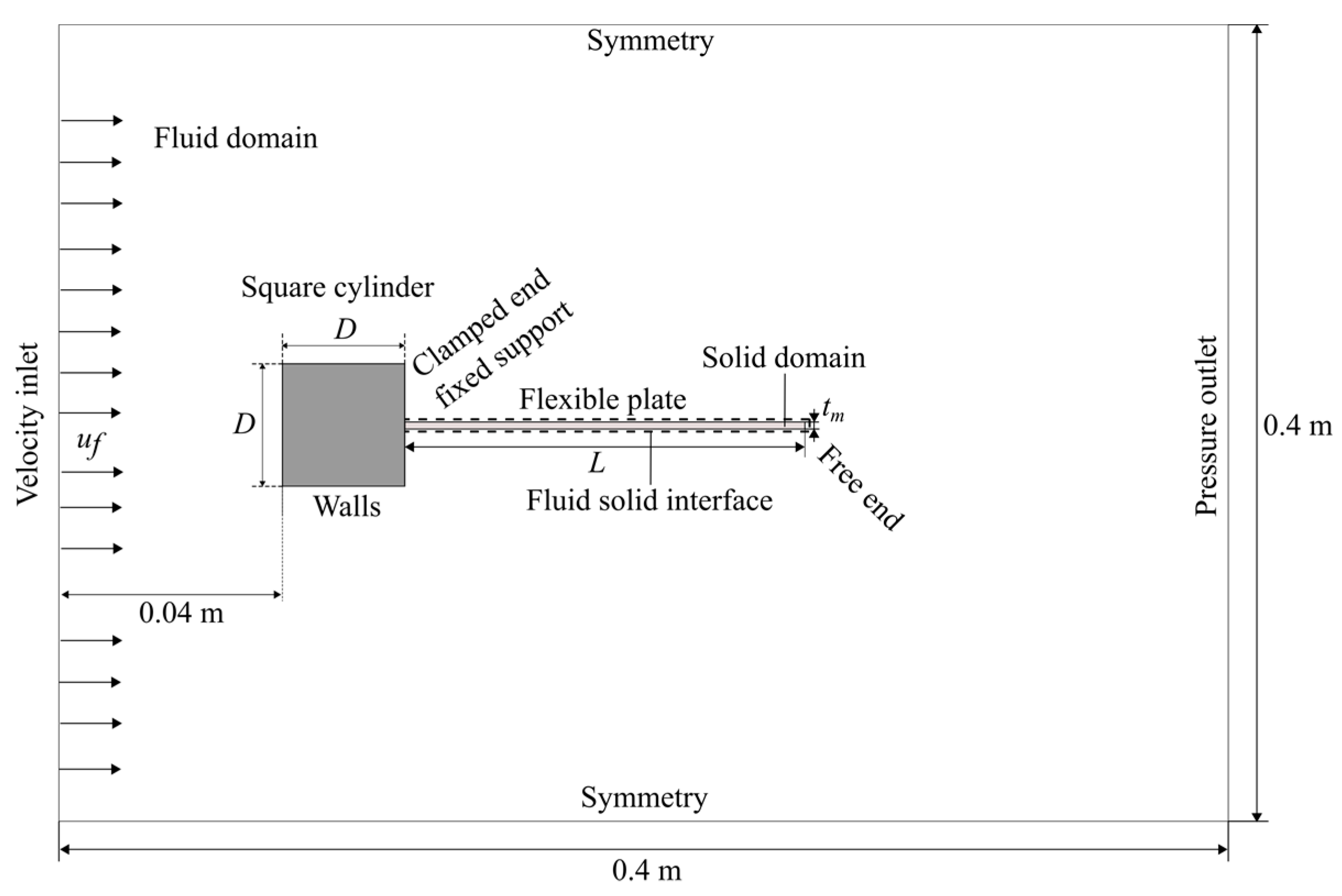
Figure 5.
Boundary conditions for the fluid and solid domain.
Figure 5.
Boundary conditions for the fluid and solid domain.
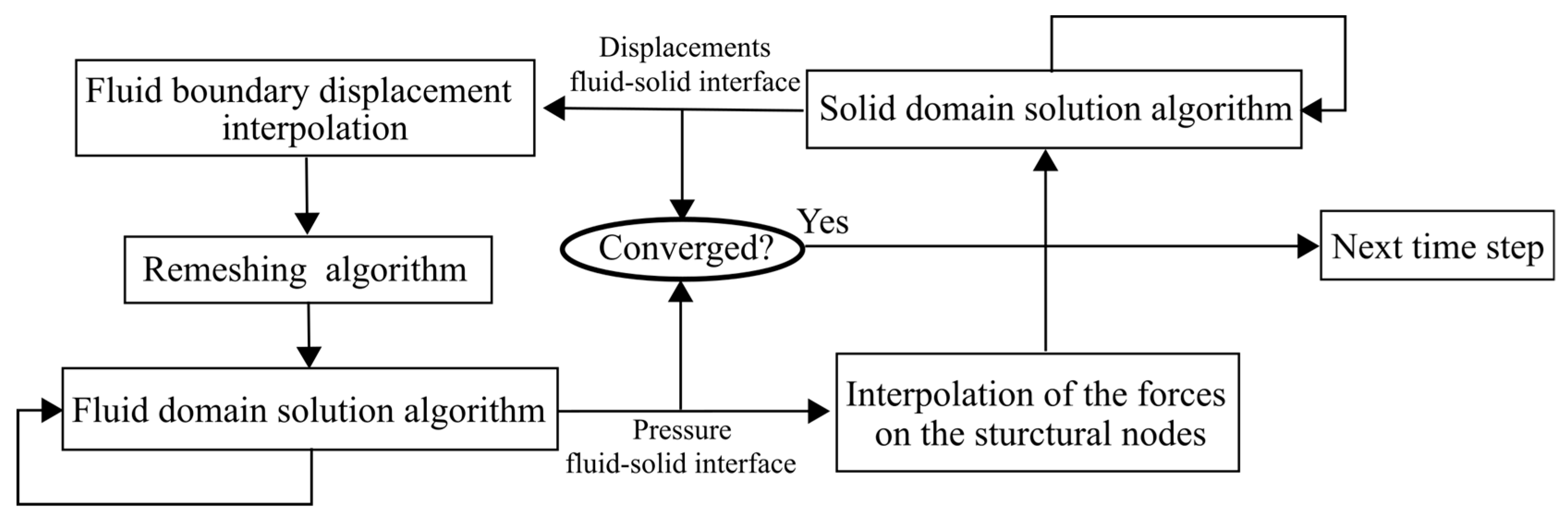
Figure 6.
Fluid–structure interaction model stagger loop solution procedure.
Figure 6.
Fluid–structure interaction model stagger loop solution procedure.
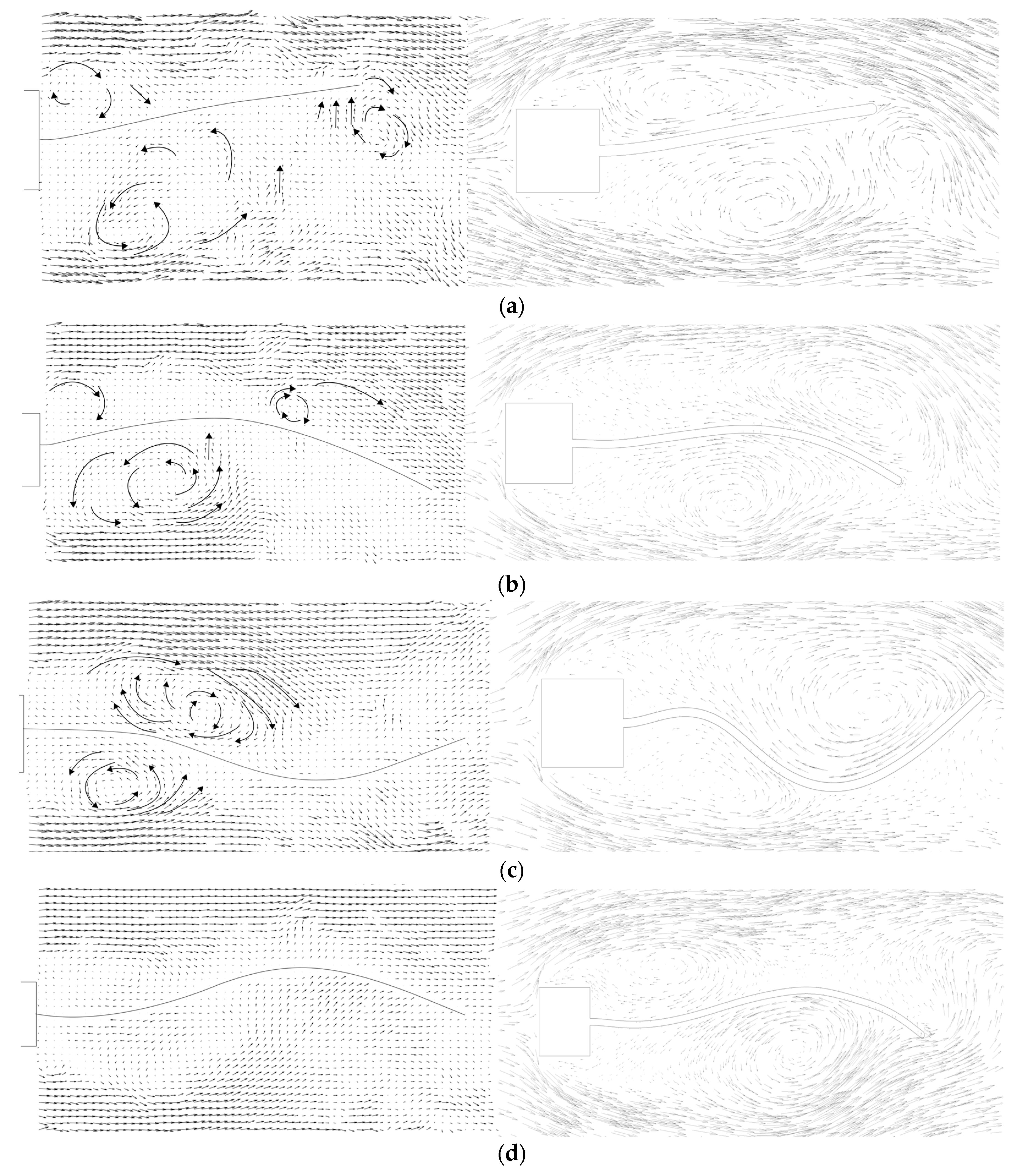
Figure 7.
Comparison between the velocity vectors given by PIV and simulations for characteristic shapes, tp = 100 µm, W = 10 mm (a) L = 50 mm at RE = 12,295, (b,c) L = 75 mm at RE = 14,279, (d) L = 100 mm at RE = 14,279.
Figure 7.
Comparison between the velocity vectors given by PIV and simulations for characteristic shapes, tp = 100 µm, W = 10 mm (a) L = 50 mm at RE = 12,295, (b,c) L = 75 mm at RE = 14,279, (d) L = 100 mm at RE = 14,279.
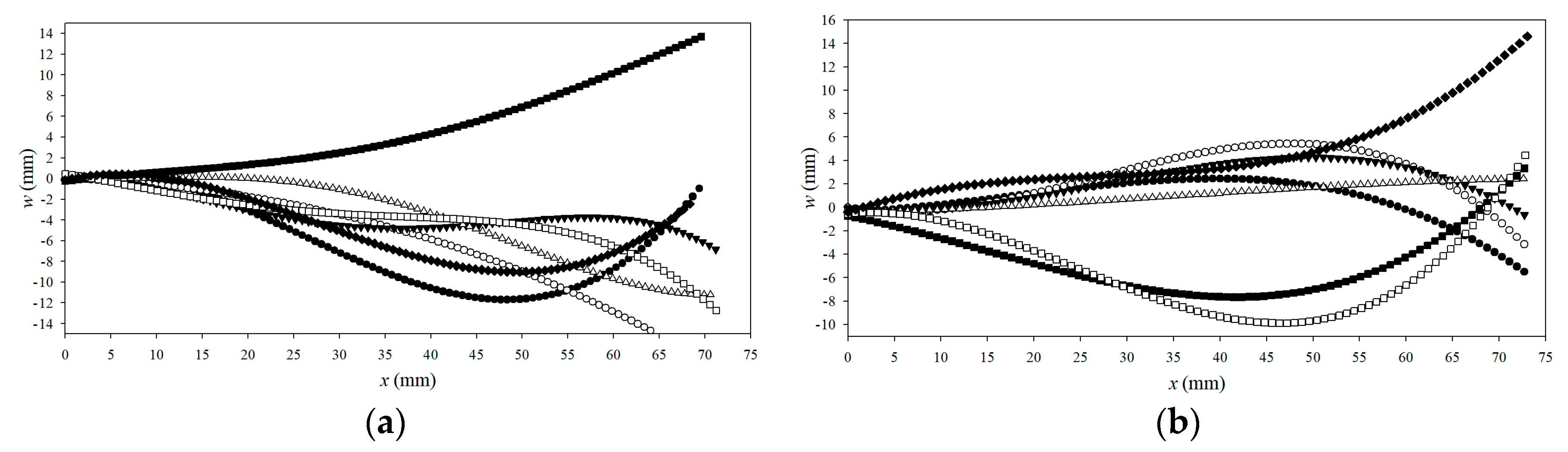
Figure 8.
Water tunnel data characteristic deflected shapes tp = 80 µm, W = 5 mm, L = 50 mm (a) RE = 8025; (b) RE = 13,245.
Figure 8.
Water tunnel data characteristic deflected shapes tp = 80 µm, W = 5 mm, L = 50 mm (a) RE = 8025; (b) RE = 13,245.
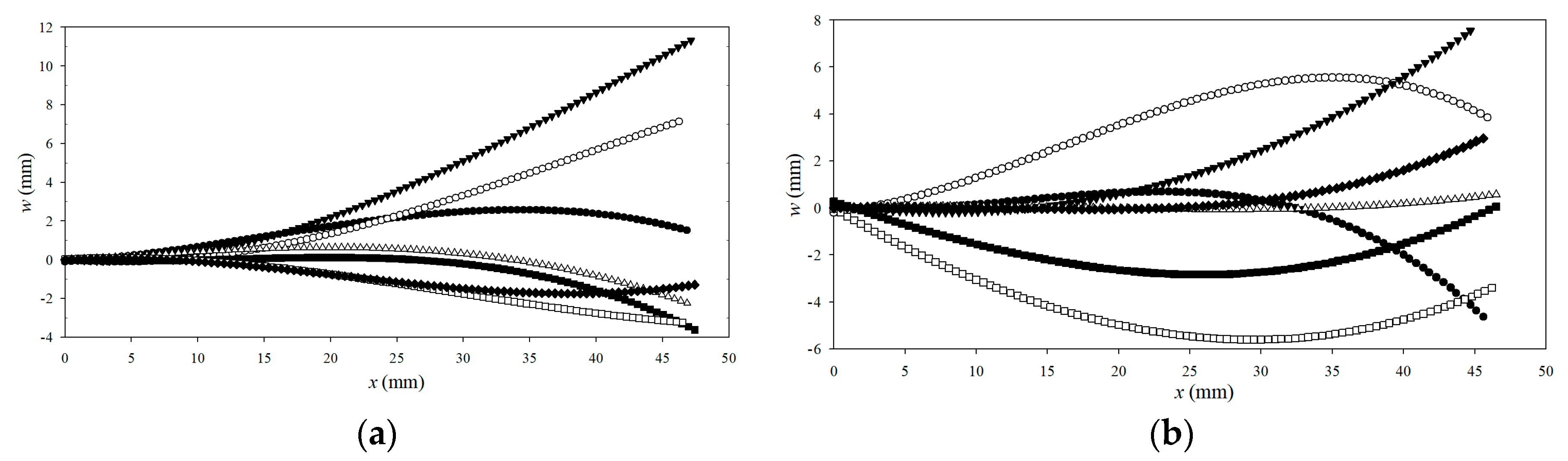
Figure 9.
Characteristic deflected shapes tp = 100 µm, W = 10 mm, L = 75 mm RE = 14,279 (a) Water tunnel data; (b) FSI model results.
Figure 9.
Characteristic deflected shapes tp = 100 µm, W = 10 mm, L = 75 mm RE = 14,279 (a) Water tunnel data; (b) FSI model results.
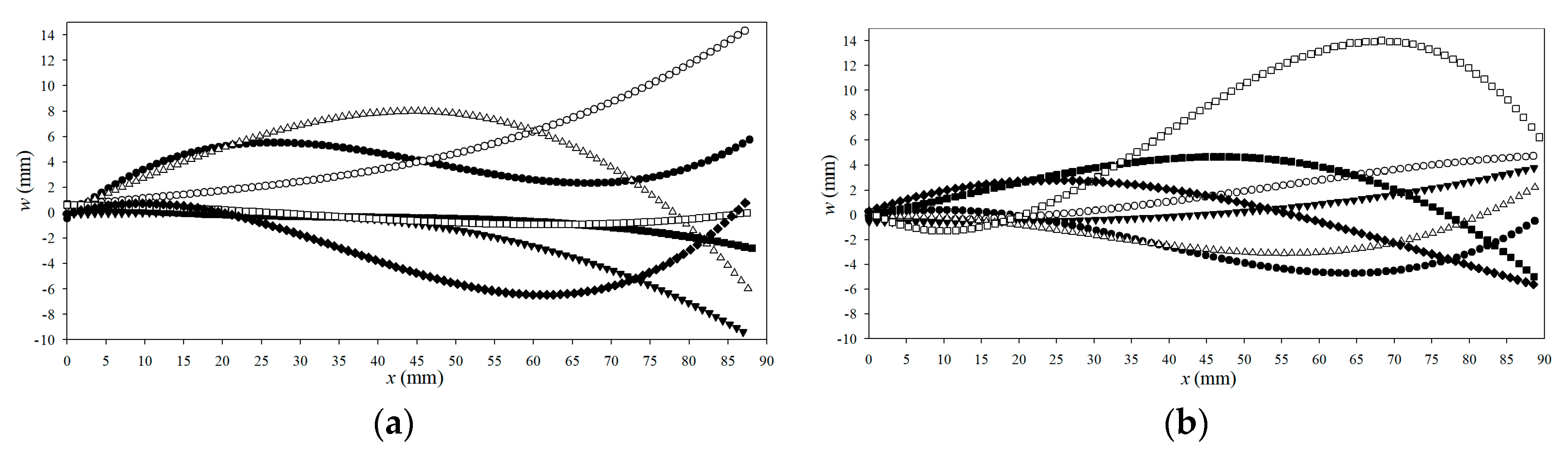
Figure 10.
Characteristic deflected shapes tp = 100 µm, W = 10 mm, L = 100 mm RE = 14,279 (a) Water tunnel data; (b) FSI model results.
Figure 10.
Characteristic deflected shapes tp = 100 µm, W = 10 mm, L = 100 mm RE = 14,279 (a) Water tunnel data; (b) FSI model results.
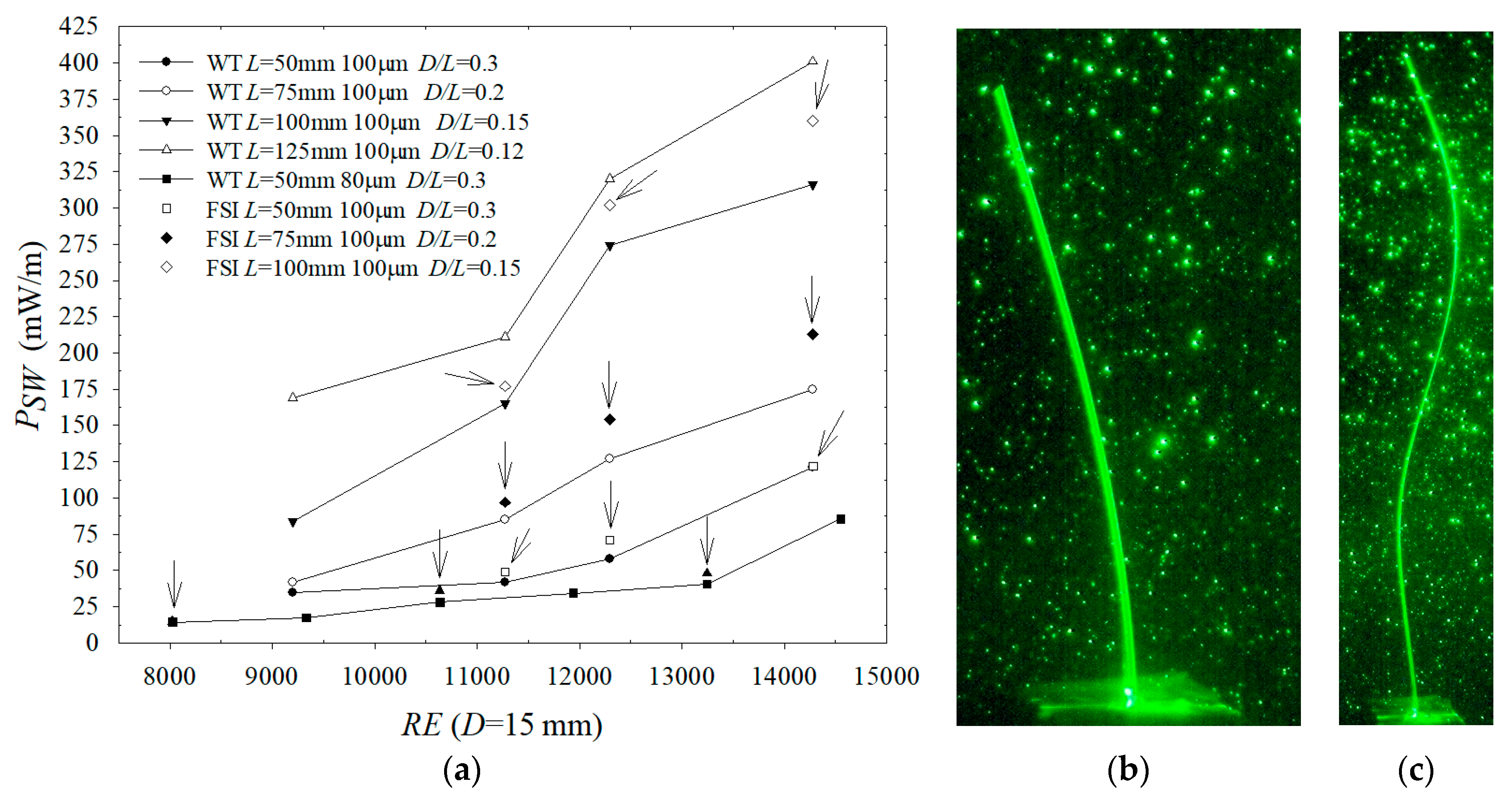
Figure 11.
(a) Bending power evolution with the Reynolds number from water tunnel experiments, and FSI model results highlighted with the arrows; (b) high-strain-energy shape recorded at RE = 9202 L = 50 mm plate; (c) high-strain-energy shape recorded at RE = 9202 L = 125 mm plate.
Figure 11.
(a) Bending power evolution with the Reynolds number from water tunnel experiments, and FSI model results highlighted with the arrows; (b) high-strain-energy shape recorded at RE = 9202 L = 50 mm plate; (c) high-strain-energy shape recorded at RE = 9202 L = 125 mm plate.
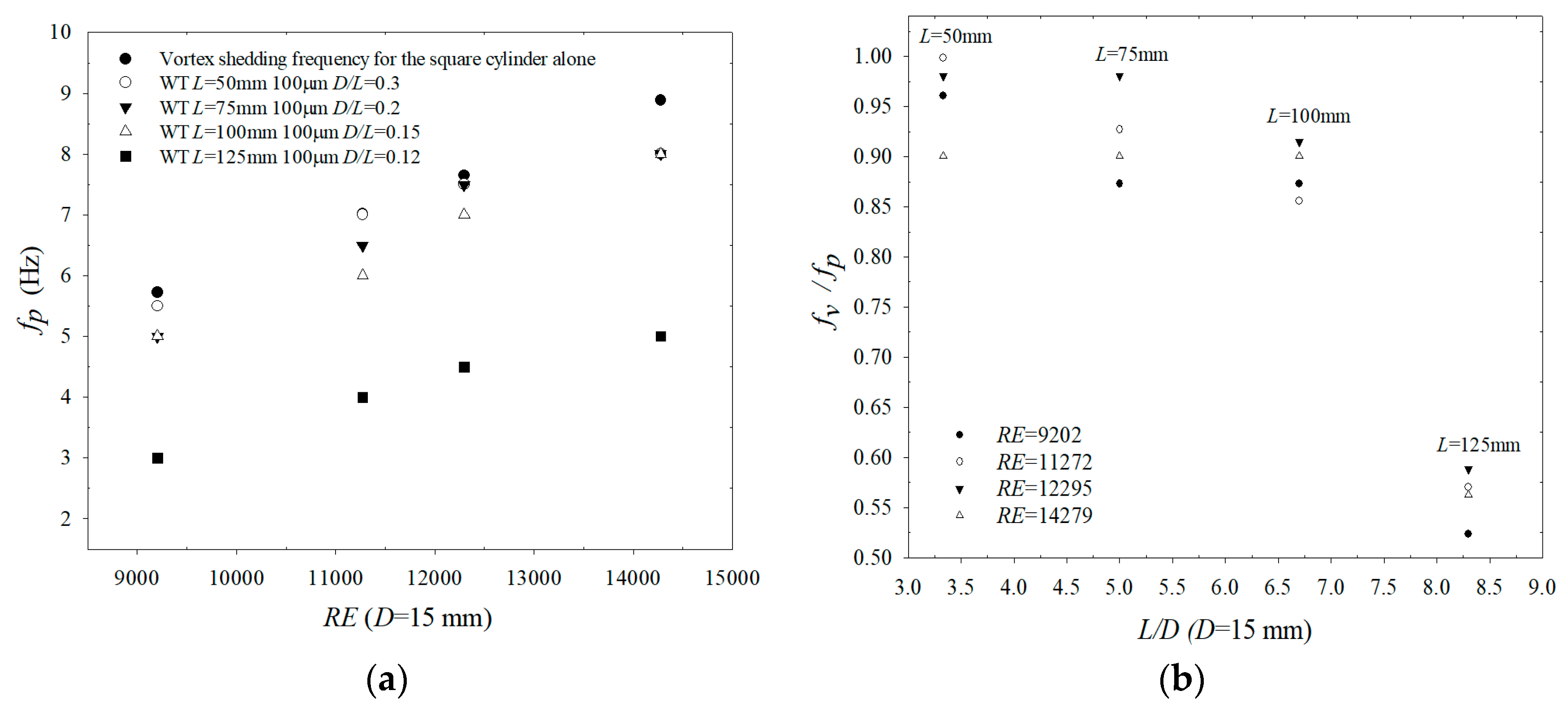
Figure 12.
Water tunnel data. (a) Vortex shedding frequency and flapping frequencies of the plates; (b) Square cylinder vortex shedding-frequency-to-flapping-frequency ratio.
Figure 12.
Water tunnel data. (a) Vortex shedding frequency and flapping frequencies of the plates; (b) Square cylinder vortex shedding-frequency-to-flapping-frequency ratio.
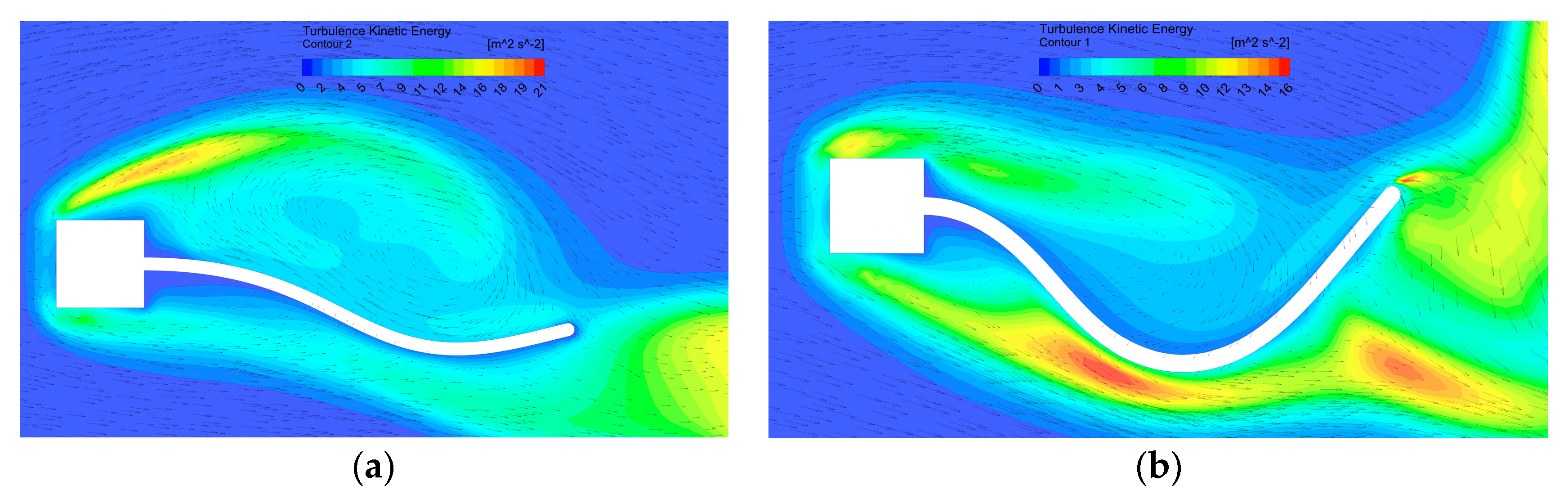
Figure 13.
Turbulent kinetic energy contours (m2/s2) and velocity vectors for higher strain energy shapes at uf = 14.3 m/s.: (a) D = 10 mm, RE = 9648; (b) D = 8 mm, RE = 7718.
Figure 13.
Turbulent kinetic energy contours (m2/s2) and velocity vectors for higher strain energy shapes at uf = 14.3 m/s.: (a) D = 10 mm, RE = 9648; (b) D = 8 mm, RE = 7718.
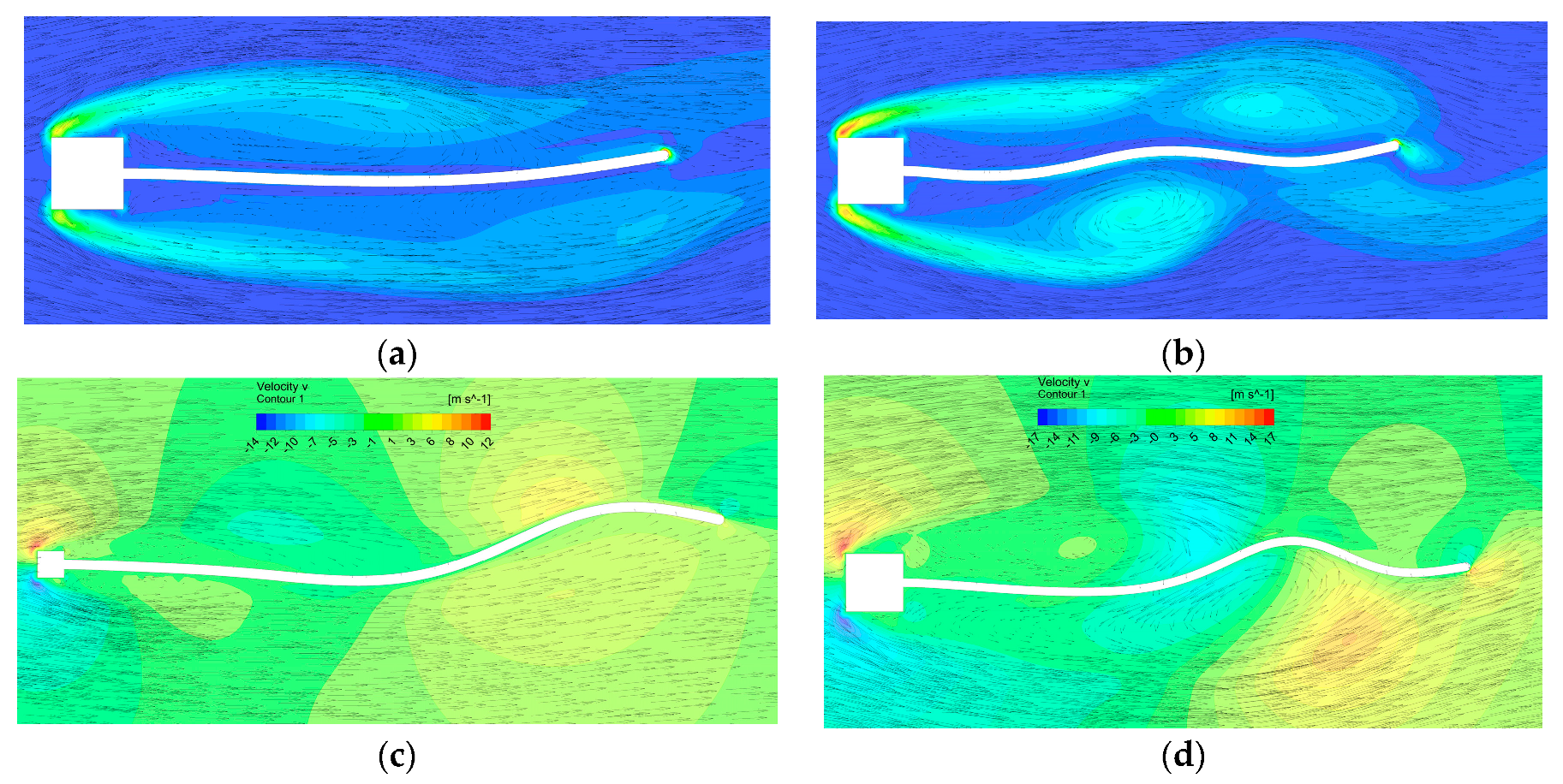
Figure 14.
Velocity vectors and vorticity contours for high-strain-energy shapes for the plate L = 75 mm, D = 10 mm, tp = 100 µm, at (a) RE = 6218; (b) RE = 12162; transversal velocity v magnitude contours (m/s) and velocity vectors for high-strain-energy shapes, plate L = 100 mm, tp = 100 µm, at (c) uf = 20 m/s, RE = 5405, D = 4 mm; (d) uf = 20 m/s, RE = 16,216, D = 12 mm.
Figure 14.
Velocity vectors and vorticity contours for high-strain-energy shapes for the plate L = 75 mm, D = 10 mm, tp = 100 µm, at (a) RE = 6218; (b) RE = 12162; transversal velocity v magnitude contours (m/s) and velocity vectors for high-strain-energy shapes, plate L = 100 mm, tp = 100 µm, at (c) uf = 20 m/s, RE = 5405, D = 4 mm; (d) uf = 20 m/s, RE = 16,216, D = 12 mm.
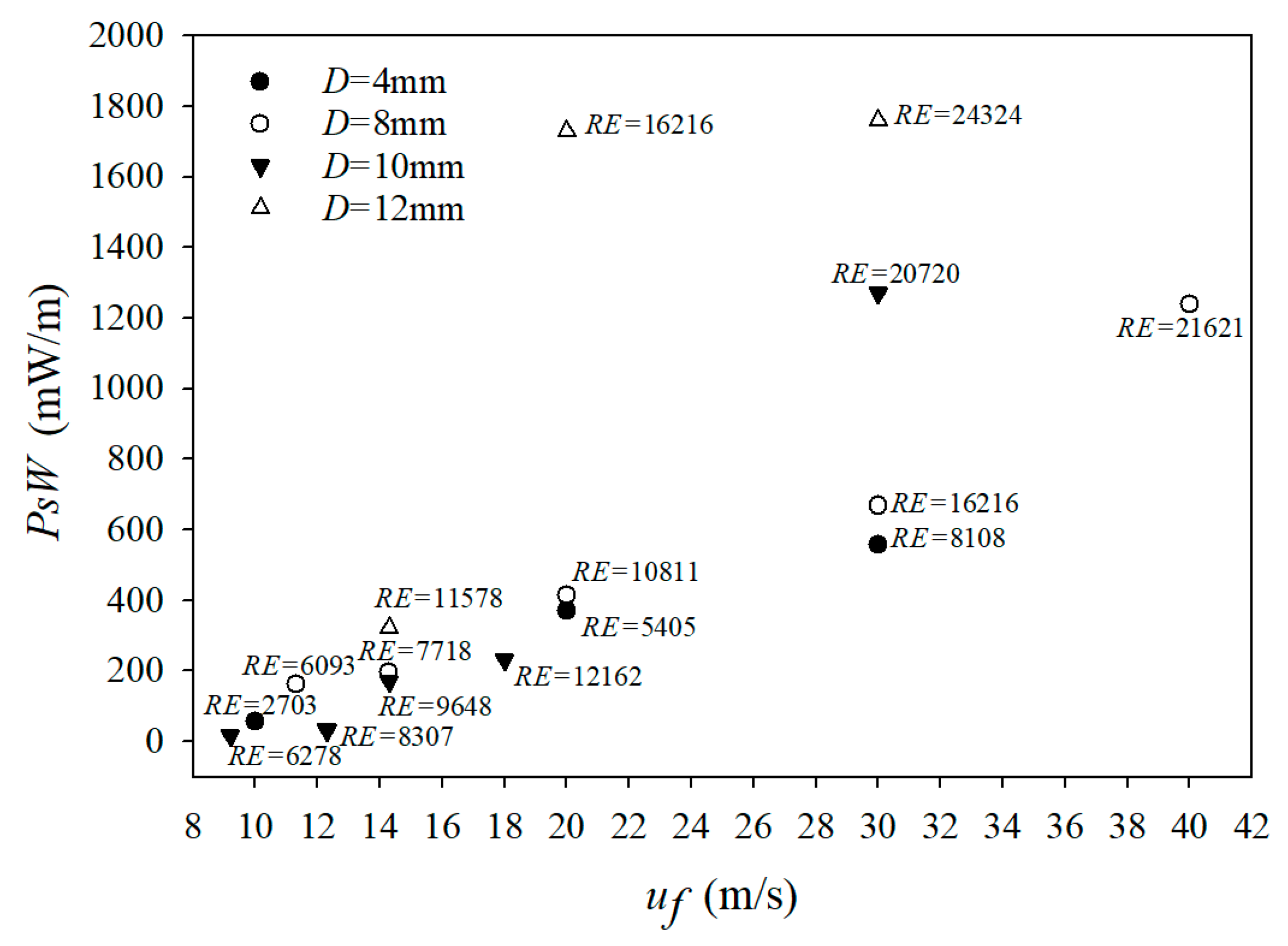
Figure 15.
L = 100 mm, tp = 100 µm, Power per width evolution with the incoming fluid velocity and square cylinder diameter D.
Figure 15.
L = 100 mm, tp = 100 µm, Power per width evolution with the incoming fluid velocity and square cylinder diameter D.
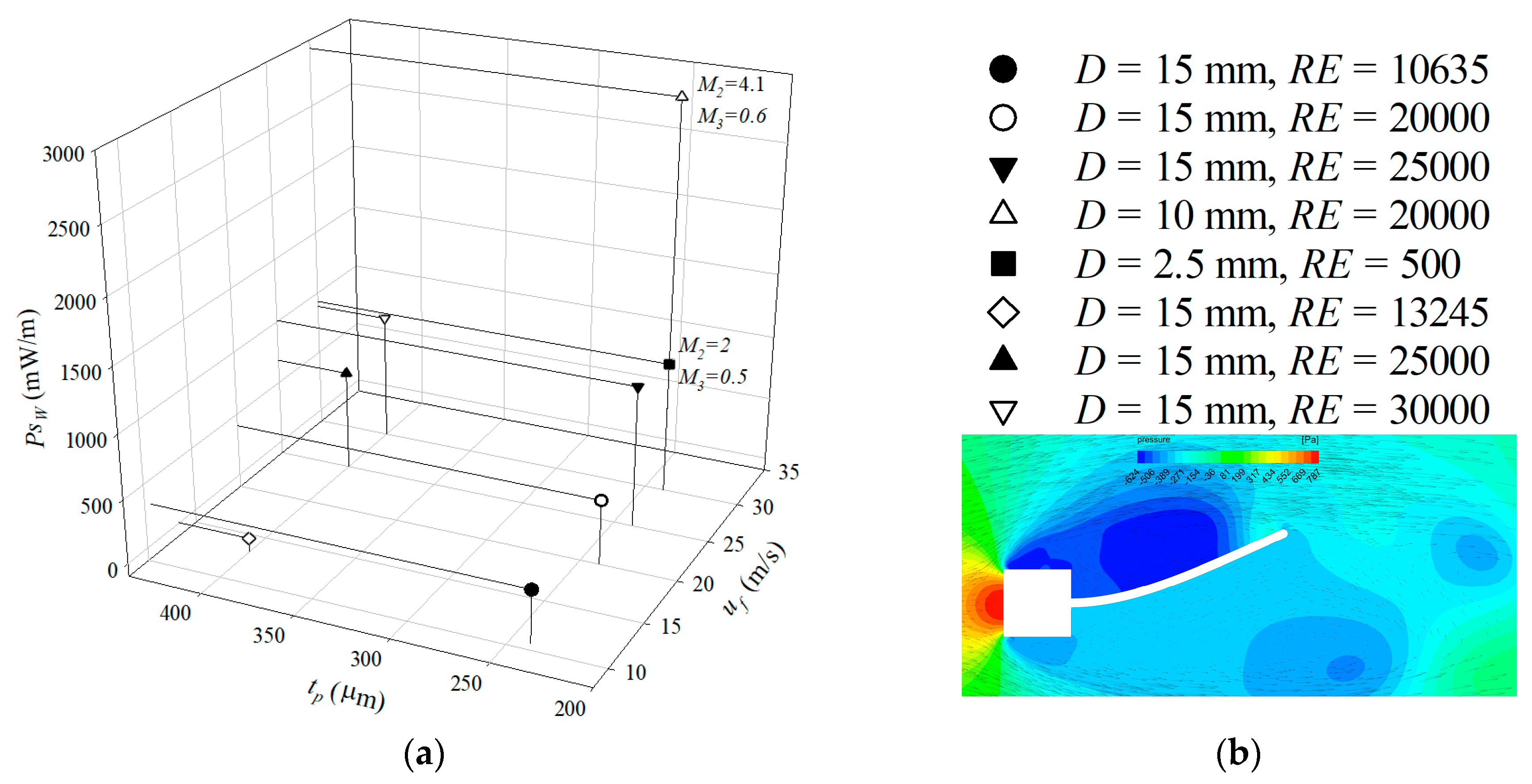
Figure 16.
(a) Bending power PsW evolution with thickness and incoming velocity for L = 50 mm; (b) Mode 1 shape dominant bending pattern for the L = 50 mm, D = 15 mm, uf = 30 m/s, tp = 400 µm, highest strain energy shape, pressure contours and velocity vectors.
Figure 16.
(a) Bending power PsW evolution with thickness and incoming velocity for L = 50 mm; (b) Mode 1 shape dominant bending pattern for the L = 50 mm, D = 15 mm, uf = 30 m/s, tp = 400 µm, highest strain energy shape, pressure contours and velocity vectors.
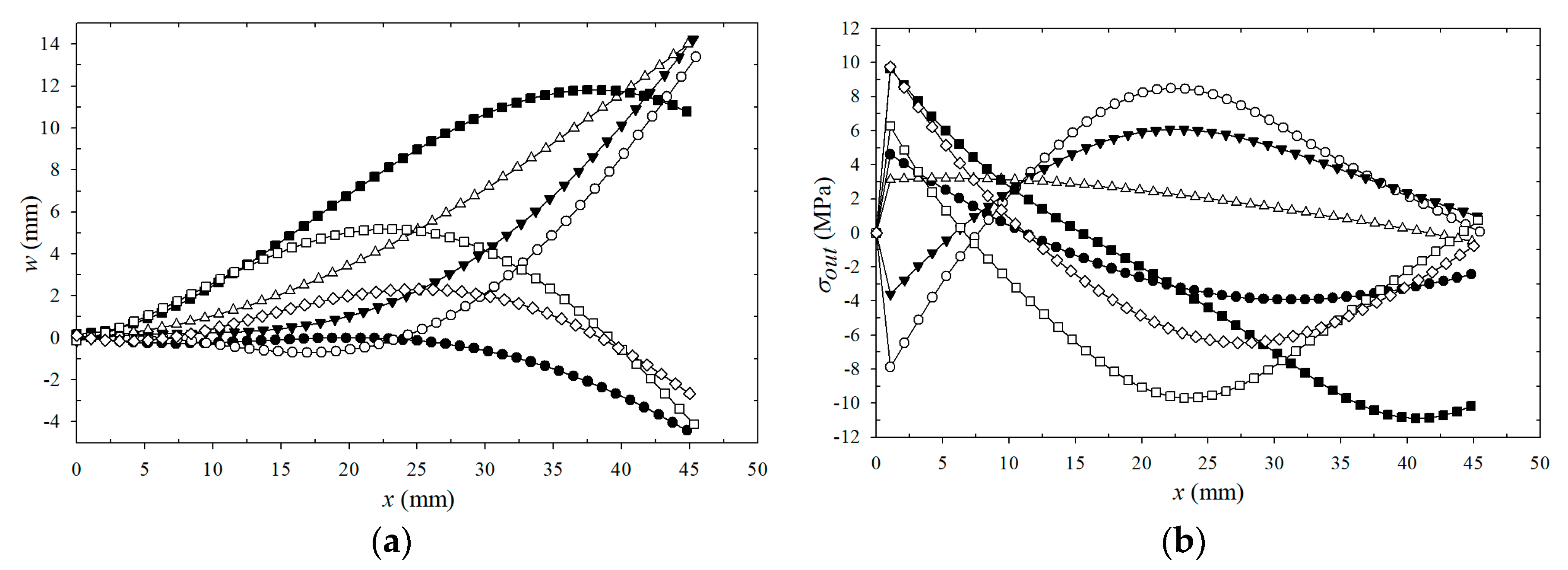
Figure 17.
L = 50 mm, D = 10 mm, uf = 30 m/s, RE = 20,000, tp = 240 µm plate: (a) Characteristic deflected shapes; (b) stress distribution on the outer fiber for the deflected shapes.
Figure 17.
L = 50 mm, D = 10 mm, uf = 30 m/s, RE = 20,000, tp = 240 µm plate: (a) Characteristic deflected shapes; (b) stress distribution on the outer fiber for the deflected shapes.
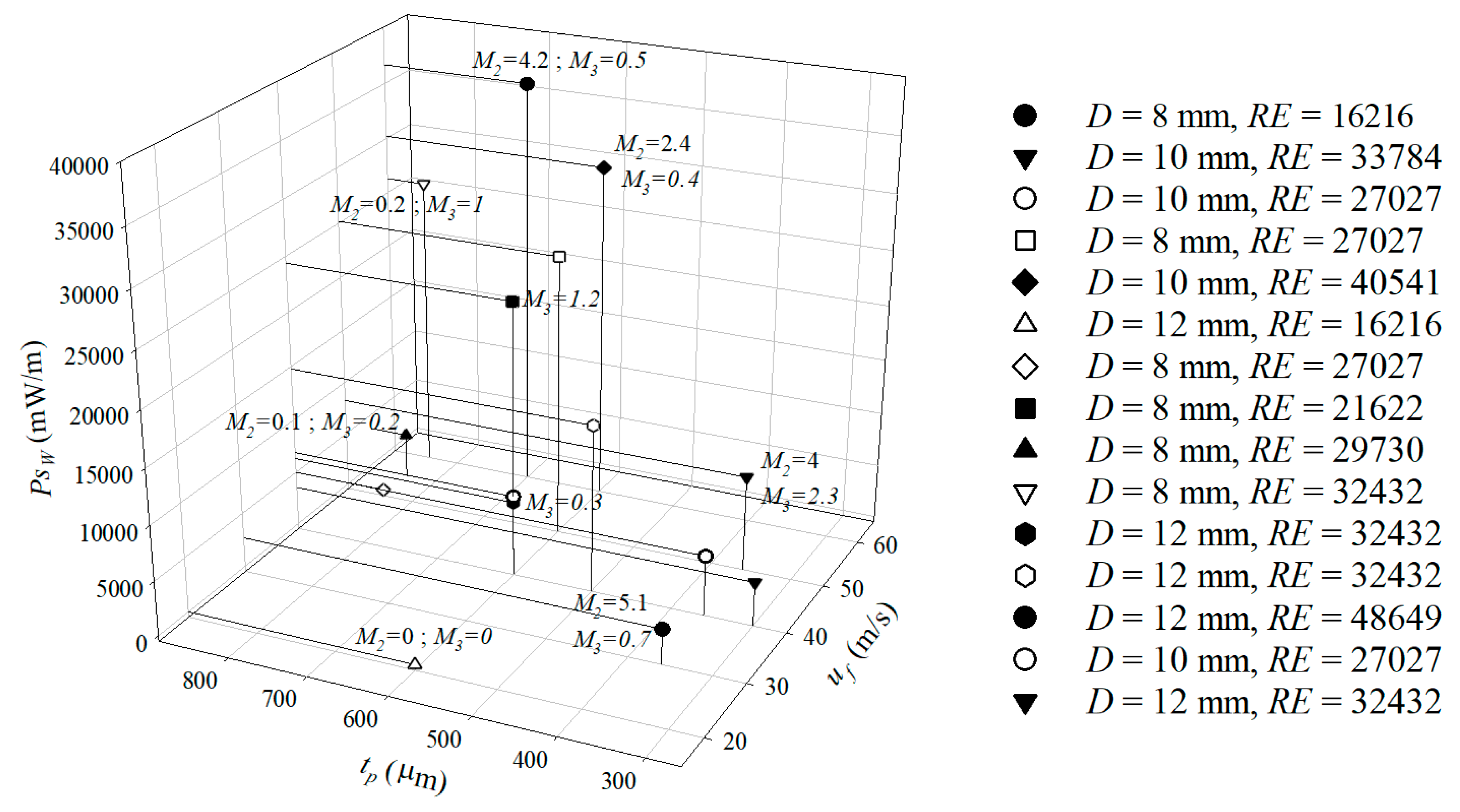
Figure 18.
Bending power PsW evolution with thickness and incoming velocity for L = 100 mm.
Figure 18.
Bending power PsW evolution with thickness and incoming velocity for L = 100 mm.
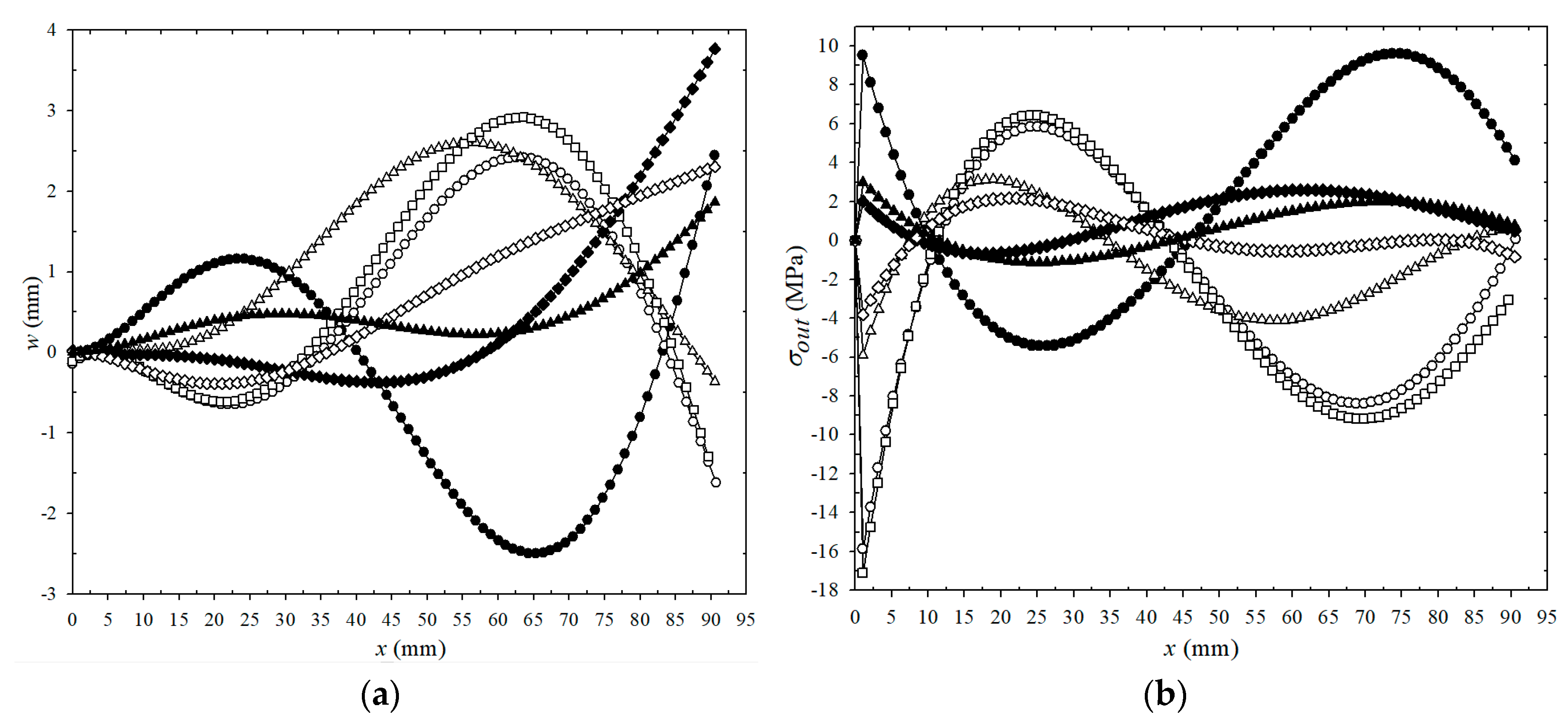
Figure 19.
L = 100 mm, D = 8 mm tp = 600 µm plate, uf = 40 m/s, RE = 21621: (a) characteristic shapes; (b) stress distribution on the outer fiber for the above shapes.
Figure 19.
L = 100 mm, D = 8 mm tp = 600 µm plate, uf = 40 m/s, RE = 21621: (a) characteristic shapes; (b) stress distribution on the outer fiber for the above shapes.
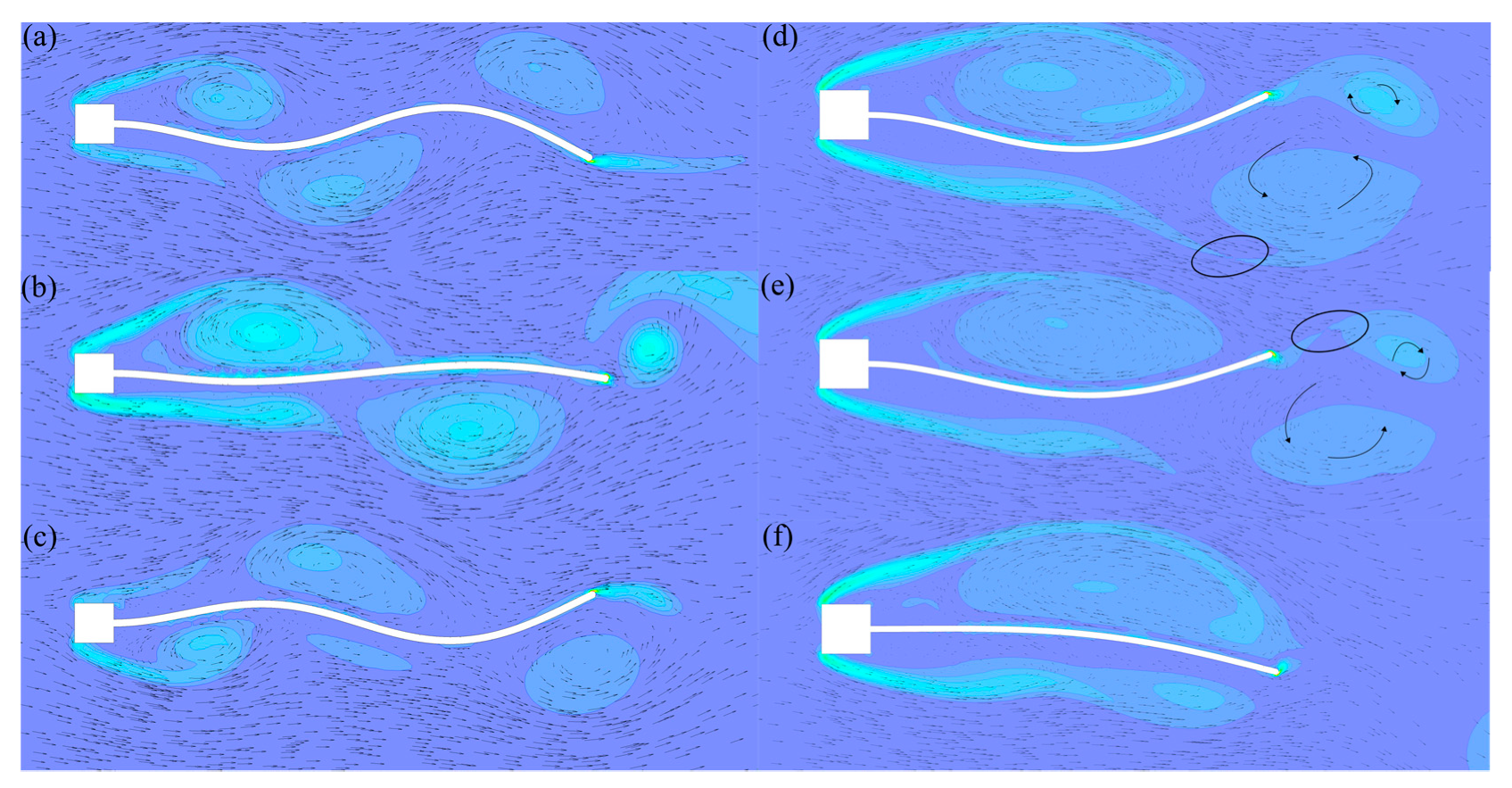
Figure 20.
Vortex shedding for the L = 100 mm, tp = 600 µm plate at uf = 40 m/s, (a–c), D = 8 mm (d), (e,f) D = 12 mm.
Figure 20.
Vortex shedding for the L = 100 mm, tp = 600 µm plate at uf = 40 m/s, (a–c), D = 8 mm (d), (e,f) D = 12 mm.
Table 1.
Fluid properties at atmospheric pressure.
Table 1.
Fluid properties at atmospheric pressure.
| Fluid at 20 °C | | |
|---|
| Air | | 1.2 |
| Water | | 998 |
Table 2.
Plate properties for the water tunnel experiments.
Table 2.
Plate properties for the water tunnel experiments.
| | | |
|---|
| 2 | 1794 | 80 | 5 |
| 2 | 1701 | 100 | 10 |
| 2 | 1475 | 120 | 10 |
Table 3.
Properties of piezoelectric PVDF.
Table 3.
Properties of piezoelectric PVDF.
| | |
|---|
| 23.9 [29] | | |
Table 4.
Averaged modal contributions ratio to mode 1 contribution, L = 100 mm.
Table 4.
Averaged modal contributions ratio to mode 1 contribution, L = 100 mm.
| RE | M1 | M2 | M3 | M4 |
|---|
| 11,272 | 1 | 0.46 | 0.57 | 0.20 |
| 12,295 | 1 | 0.77 | 0.49 | 0.27 |
Table 5.
Averaged modal contributions ratio to mode 1 contribution, L = 125 mm.
Table 5.
Averaged modal contributions ratio to mode 1 contribution, L = 125 mm.
| RE | M1 | M2 | M3 | M4 |
|---|
| 11,272 | 1 | 0.42 | 0.26 | 0.16 |
| 12,295 | 1 | 0.51 | 0.23 | 0.25 |
Table 6.
Modal frequencies of the plates.
Table 6.
Modal frequencies of the plates.
| L mm | | | |
|---|
| 50 | 7 | 44 | 123 |
| 75 | 3.1 | 19 | 55 |
| 100 | 1.8 | 11 | 31 |
| 125 | 1.1 | 7 | 20 |
Table 7.
Simulations results for the plate L = 50 mm, tp = 100 µm.
Table 7.
Simulations results for the plate L = 50 mm, tp = 100 µm.
| D (mm) | | RE | |
|---|
| 8 | 9.2 | 4974 | 16 |
| 8 | 14.3 | 7718 | 114 |
| 10 | 9.2 | 6218 | 65 |
| 10 | 11.3 | 7616 | 200 |
| 10 | 12.3 | 8307 | 235 |
| 10 | 14.3 | 9648 | 394 |
Table 8.
Simulations results for the plate L = 75 mm, tp = 100 µm.
Table 8.
Simulations results for the plate L = 75 mm, tp = 100 µm.
| D (mm) | | RE | |
|---|
| 10 | 9.2 | 6218 | 55 |
| 10 | 11.3 | 7616 | 97 |
| 10 | 12.3 | 8307 | 205 |
| 10 | 18 | 12,162 | 434 |
Table 9.
Estimated piezoelectric power output for the plates L = 50 mm, L = 100 mm.
Table 9.
Estimated piezoelectric power output for the plates L = 50 mm, L = 100 mm.
| L (mm) | | | | |
|---|
| 50 | 10 | 135 | 98 | - |
| 50 | 50 | 207 | 40 | - |
| 50 | 100 | 140 | 21 | - |
| 100 | 10 | 132 | 105 | 526 |
| 100 | 50 | 184 | 132 | 658 |
| 100 | 100 | 132 | 79 | 500 |
Table 10.
Conversion efficiencies.
Table 10.
Conversion efficiencies.
| L mm | | | | | |
|---|
| 50 | 0.36 | 1.5 | 8 | 0.03 | 0.12 |
| 100 | 0.64 | 2.5 | 4 | 0.03 | 0.1 |


_Chang.jpg)





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}